Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству отображения полосы движения и к способу отображения полосы движения, которые отображают конкретный участок для каждой полосы движения.
Уровень техники
[0002] Известна технология, в которой устройство, выполненное с возможностью обеспечения инструкций навигации по маршруту до заданного пункта назначения, отображает участок с дорожной пробкой или т.п. красным или другими цветами на дороге на карте (см. патентную литературу 1). Таким образом, водитель может легко распознавать рекомендованный для объезда участок или рекомендованный для движения участок и выбирать соответствующий маршрут.
Список цитируемых источников
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент Японии № 2015-25705
Раскрытие изобретения
Техническая задача
[0004] Однако в случае отображения дороги, включающей в себя множество полос движения, для представления участков, таких как участки с дорожными пробками на соответствующих полосах движения, технология, описанная в патентной литературе 1, отображает начальную точку или конечную точку каждого из участков без обеспечения какого-либо предварительного оповещения. Соответственно, водитель может растеряться в момент, когда число полос движения, на которых отображаются участки, увеличивается или уменьшается.
[0005] В свете проблемы, описанной выше, задача настоящего изобретения состоит в создании устройства отображения полосы движения и способа отображения полосы движения, которые могут уменьшать замешательство водителя.
Решение задачи
[0006] Устройство отображения полосы движения получает информацию о дорожном движении конкретного участка для каждой из полос движения, отображает упомянутый конкретный участок на полосе движения, по которой движется транспортное средство, в зависимости от положения транспортного средства, и отображает переходную область относительно упомянутого конкретного участка, рядом по меньшей мере с одним из начальной точки или конечной точки упомянутого конкретного участка, таким образом, что рисунок переходной области изменяется больше в направлении по меньшей мере одного из начальной точки или конечной точки.
Преимущества изобретения
[0007] Настоящее изобретение может обеспечивать устройство отображения полос движения и способ отображения полос движения, которые могут уменьшать замешательство водителя путём отображения области, указывающей на переход от участка полосы движения или к нему.
Краткое описание чертежей
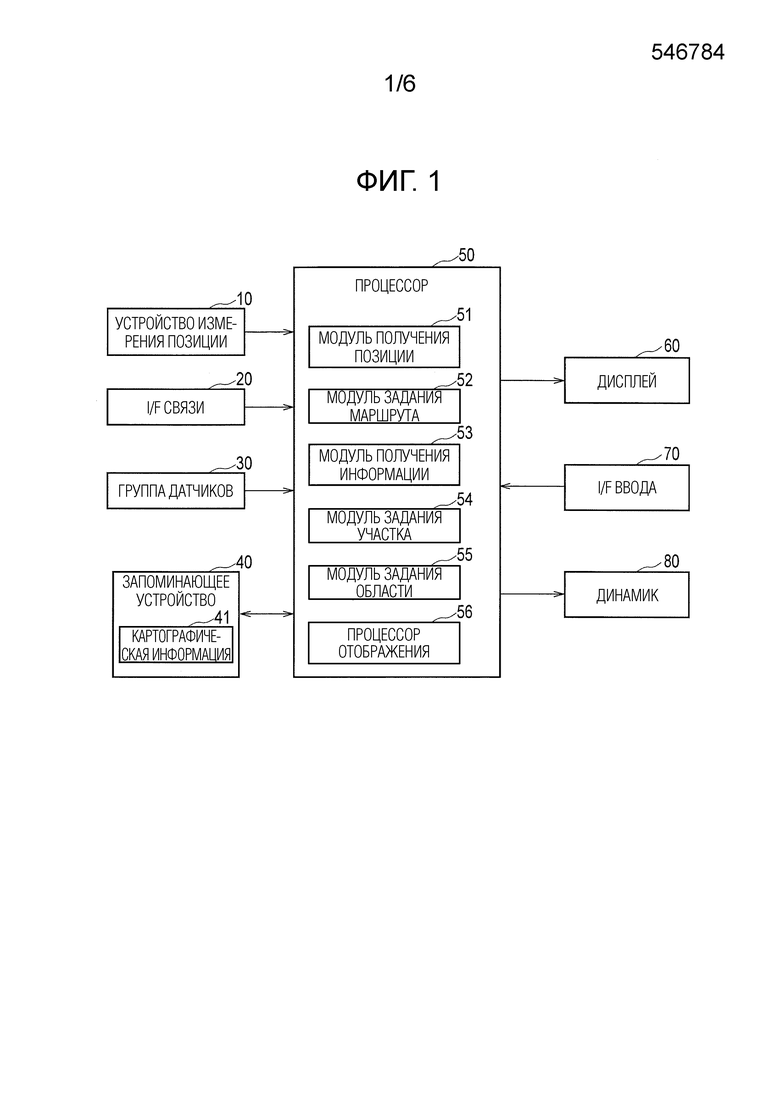
[0008] Фиг. 1 - это блок-схема, поясняющая пример конфигурации устройства отображения полосы движения согласно варианту осуществления настоящего изобретения.
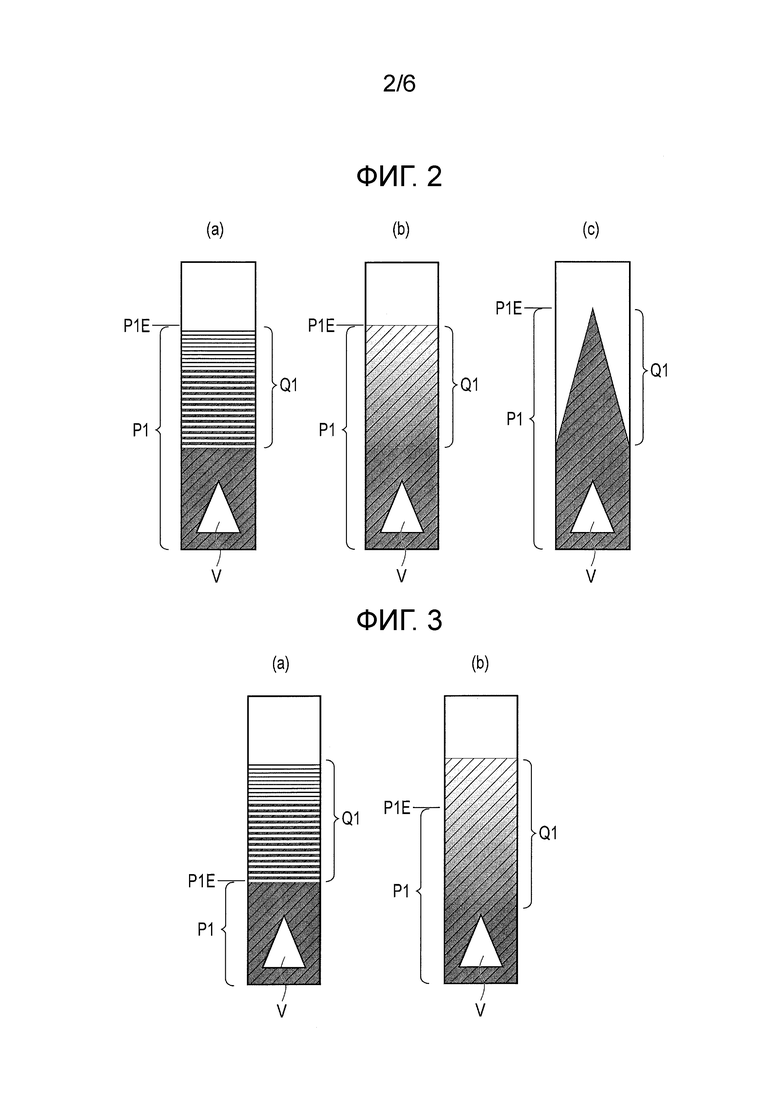
Каждая из частей (a)-(c) на фиг. 2 являются примером, иллюстрирующим переходную область, заданную для рекомендованного для движения участка.
Каждая из частей (a)-(b) на фиг. 3 являются видом, объясняющим другой пример переходной области, заданной для рекомендованного для движения участка.
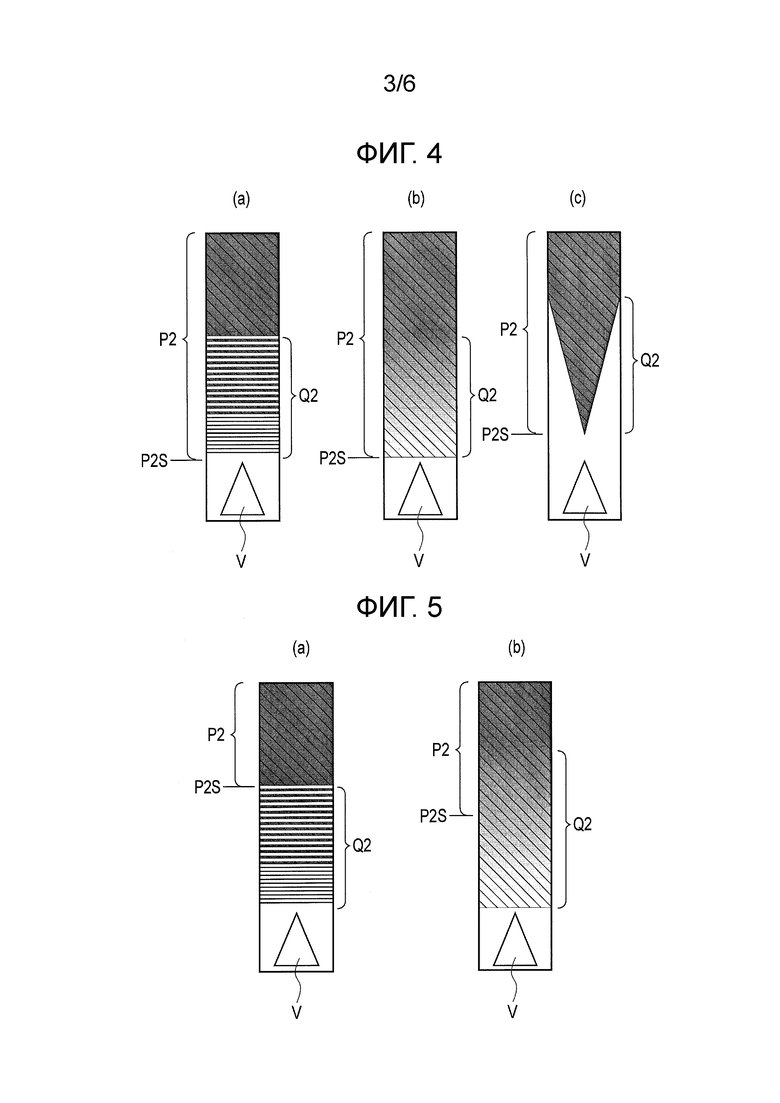
Каждая из частей (a)-(c) на фиг. 4 являются примером, иллюстрирующим переходную область, заданную для рекомендованного для объезда участка.
Каждая из частей (a) и (b) на фиг. 5 являются видом, объясняющим другой пример переходной области, заданной для рекомендованного для объезда участка.
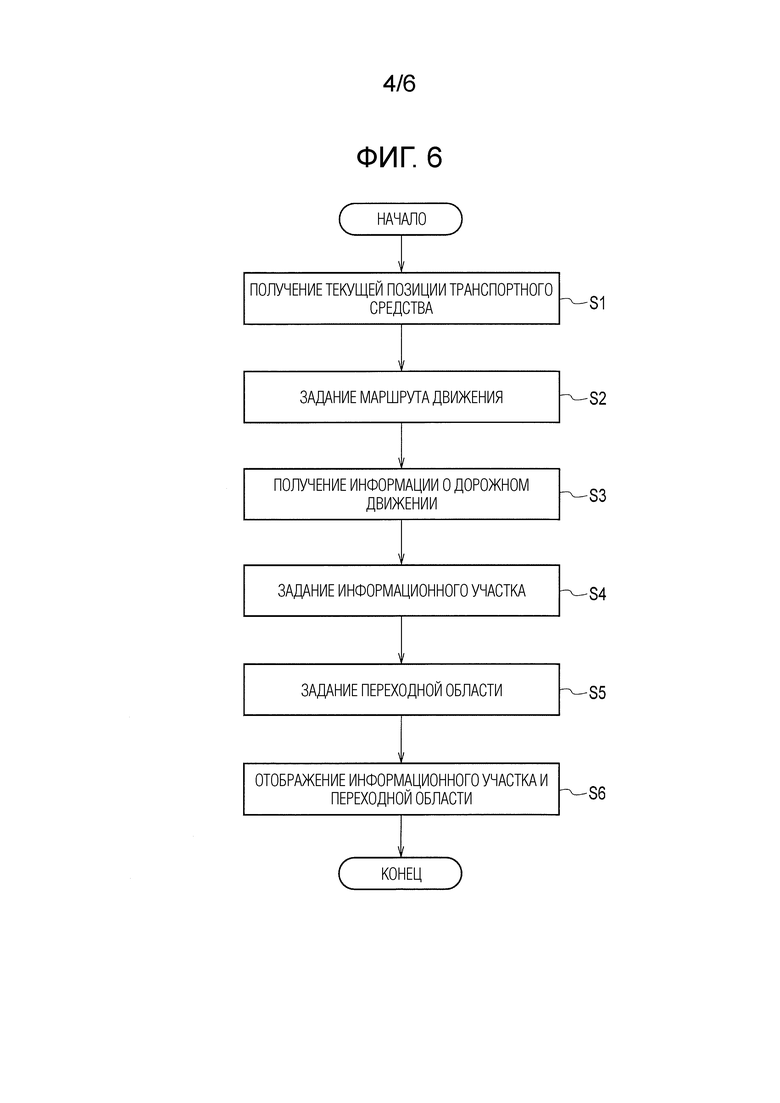
Фиг. 6 - это блок-схема, поясняющая способ отображения полосы движения посредством устройства отображения полосы движения согласно варианту осуществления настоящего изобретения.
Фиг. 7 - это вид, поясняющий работу устройства отображения полосы движения согласно первому модифицированному примеру варианта осуществления настоящего изобретения.
Фиг. 8 - это вид, поясняющий работу устройства отображения полосы движения согласно первому модифицированному примеру варианта осуществления настоящего изобретения.
Фиг. 9 - это вид, поясняющий работу устройства отображения полосы движения согласно второму модифицированному примеру варианта осуществления настоящего изобретения.
Фиг. 10 - это вид, поясняющий работу устройства отображения полосы движения согласно второму модифицированному примеру варианта осуществления настоящего изобретения.
Осуществление изобретения
[0009] Вариант осуществления настоящего изобретения описан с обращением к чертежам. В описании чертежей одинаковые или аналогичные части обозначены одинаковыми или аналогичными условными обозначениями, и совпадающее описание не приводится.
[0010] (Устройство отображения полосы движения)
Как иллюстрировано на фиг. 1, устройство отображения полосы движения согласно варианту осуществления включает в себя устройство 10 измерения положения, интерфейс (I/F) 20 связи, группу 30 датчиков, запоминающее устройство 40, процессор 50, дисплей 60, I/F 70 ввода и динамик 80. Устройство отображения полосы движения согласно варианту осуществления настоящего изобретения, например, устанавливается на транспортное средство V и отыскивает маршруты движения на основании полос движения.
[0011] Устройство 10 измерения положения измеряет текущее положение с помощью системы позиционирования, такой как система глобального позиционирования (GPS). Устройство 10 измерения положения включает в себя, например, GPS-приемник. Устройство 10 измерения положения выводит измеренное текущее положение в процессор 50 раз за разом.
[0012] I/F 20 связи является, например, блоком связи, который беспроводным способом обменивается сигналами с внешним окружением. I/F 20 связи может принимать, например, информацию о дорожном движении по каждой из различных полос движения извне с помощью интеллектуальной транспортной системы (ITS), которая отправляет информацию о дорожном движении, такую как информация о дорожных пробках, информация управления дорожным движением и предупреждающую информацию, метеорологическую информацию и т.п. в реальном времени. ITS включает в себя VICS (система автомобильной информации и связи: зарегистрированная торговая марка), интегрированные средства обработки и передачи информации и т.п. I/F 20 связи периодически выводит принятую информацию в процессор 50.
[0013] Группа 30 датчиков может быть образована датчиком скорости, датчиком ускорения, датчиком угловой скорости, датчиком угла поворота рулевого колеса и т.п. Группа 30 датчиков определяет скорость транспортного средства V, ускорение по трем осям и угловую скорость транспортного средства V в трехмерной декартовой системе координат и т.п. с помощью датчиков и выводит обнаруженные результаты в процессор 50 раз за разом. Группа 30 датчиков может включать в себя датчик изображения, который захватывает изображение вокруг транспортного средства V, датчик расстояния, такой как лазерный дальномер (LRF), который обнаруживает расстояние от транспортного средства V до цели и направление, в котором цель присутствует, датчик угла направления, который обнаруживает угол направления транспортного средства V, и т.п.
[0014] Запоминающее устройство 40 хранит картографическую информацию 41, включающую в себя полосы движения на каждой дороге. Запоминающее устройство 40 может быть выполнено в виде полупроводниковой памяти, магнитного диска или т.п. Запоминающее устройство 40 может включать в себя информацию о признаках, присутствующих вокруг дорог. Запоминающее устройство 40 может также хранить программы, необходимые для обработки, выполняемой процессором 50. Запоминающее устройство 40 может быть выполнено в виде одного элемента аппаратных средств или множества элементов аппаратных средств.
[0015] Процессор 50 включает в себя модуль 51 получения положения, модуль 52 задания маршрута, модуль 53 получения информации, модуль 54 задания участка, модуль 55 задания области и процессор 56 отображения. Процессор 50 может быть выполнен, например, в виде микроконтроллера, который является интегральной схемой, включающей в себя центральный процессор (CPU), память, I/F ввода/вывода и т.п. В этом случае множество процессоров (51-56) информации, образующих процессор 50, реализуются посредством CPU, исполняющего компьютерную программу, установленную заранее в микроконтроллере. Части, образующие процессор 50, могут быть выполнены в виде единого элемента аппаратных средств или отдельных элементов аппаратных средств. Микроконтроллер может служить также, например, как электронный блок управления (ECU), используемый для другого управления, ассоциированного с транспортным средством V, таким как автоматическое управление движением.
[0016] Дисплей 60 отображает изображения и символы согласно управлению посредством процессора 50, чтобы представлять различные части информации пассажиру транспортного средства V. Дисплей 60 формируется, например, из дисплея, такого как жидкокристаллический дисплей. Дисплей 60 отображает карту области вокруг транспортного средства V, которая включает в себя дороги, записанные в картографической информации 41, и полосы движения на каждой дороге согласно управлению процессора 50.
[0017] I/F 70 ввода, например, принимает операции, выполняемые пассажиром, и выводит сигналы, соответствующие операциям, в процессор 50. Операции, выполняемые в I/F 70 ввода, могут быть выполнены голосом. Дисплей 60 и I/F 70 ввода могут быть сформированы объединенным образом как дисплей с сенсорной панелью. Динамик 80 воспроизводит голоса и звуки согласно управлению посредством процессора 50, чтобы представлять различные части информации пассажиру транспортного средства V.
[0018] Модуль 51 получения положения получает текущее положение транспортного средства V в картографической информации 41 на основании текущего положения, которое измеряется посредством устройства 10 измерения положения, и интервала перемещения транспортного средства V и положения транспортного средства V относительно признаков, которые обнаруживаются посредством группы 30 датчиков.
[0019] Модуль 52 задания маршрута задает, например, маршрут движения из текущего положения, полученного посредством модуля 51 получения положения, до пункта назначения, который задается на основании операции, выполняемой пассажиром на I/F 70 ввода или т.п., и который должен быть достигнут транспортным средством V, в картографической информации 41.
[0020] Модуль 53 получения информации получает по меньшей мере информацию о дорожном движении по каждой из полос движения, ассоциированных с маршрутом, по которому движется транспортное средство V, от I/F 20 связи. Информация о дорожном движении по каждой полосе движения является, например, информацией о дорожных пробках, указывающей участок с дорожной пробкой или перегруженностью движения, информацией о регулировании дорожного движения, указывающей участок с регулированием дорожного движения, информацией, указывающей участок дороги повышенной опасности аварии, и т.п. Кроме того, модуль 53 получения информации получает, в качестве информации о дорожном движении, направляющую информацию, указывающую участок, где транспортное средство V должно двигаться, и участок для объезда участка дорожной пробки или участка с регулированием дорожного движения, на основании маршрута движения, заданного посредством модуля 52 задания маршрута. Модуль 53 получения информации может получать информацию о дорожном движении для каждой полосы движения, записанную заранее из картографической информации 41, или получать информацию о дорожном движении для каждой полосы движения вокруг транспортного средства V.
[0021] Модуль 54 задания участка задает участок, указанный посредством информации о дорожном движении, полученной посредством модуля 53 получения информации по меньшей мере для полосы движения в картографической информации 41, по которой движется транспортное средство V, в качестве информационного участка, на котором некоторая информация должна быть сообщена водителю транспортного средства V. Информационный участок включает в себя по меньшей мере одно из рекомендованного для движения участка, который указывается посредством направляющей информации, и по которому транспортному средству V рекомендуется двигаться, и рекомендованного для объезда участка, который указывается посредством информации о дорожной пробке, информации о регулировании дорожного движения, информации, указывающей участок дороги повышенной опасности аварии, и т.п., и который рекомендуется избегать.
[0022] Модуль 55 задания области задает переходную область, указывающую переход с или на информационный участок, заданный посредством модуля 54 задания участка, рядом по меньшей мере с одним из начальной точки и конечной точки информационного участка. Переходная область является областью с некоторой протяженностью в направлении полосы движения.
[0023] Процессор 56 отображения отображает, на дисплее 60 по меньшей мере полосу движения в картографической информации 41, по которой движется транспортное средство V, информационный участок, заданный посредством модуля 54 задания участка, и переходную область, заданную для информационного участка, в зависимости от текущего положения транспортного средства V.
[0024] Например, как иллюстрировано в частях (a)-(c) на фиг. 2, дисплей 60 отображает рекомендованный для движения участок P1, заданный для полосы движения, по которой движется транспортное средство V, и переходную область Q1 рядом с конечной точкой P1E рекомендованного для движения участка P1, согласно управлению посредством процессора 56 отображения. Каждый из белых треугольников указывает текущее положение транспортного средства V. Например, дисплей 60 отображает изображение так, что верхняя его сторона соответствует передней стороне транспортного средства V, и изображение прокручивается вниз, когда транспортное средство V движется вперед.
[0025] Рекомендованный для движения участок P1, исключающий переходную область Q1, отображается холодным цветом, таким как, например, зеленый, так что пассажир может интуитивно распознавать рекомендованный для движения участок P1 (см. штриховку линиями, протягивающимися вверх и вправо). В примере, иллюстрированном в части (a) на фиг. 2, переходная область Q1 отображается так, что ее рисунок изменяется от плотного до разреженного в направлении от рекомендованного для движения участка P1 к другому участку. В примере, иллюстрированном в части (b) на фиг. 2, переходная область Q1 отображается так, что ее цвет становится ближе к цвету другого участка в направлении от рекомендованного для движения участка P1 к другому участку. В примере, иллюстрированном в части (c) на фиг. 2, переходная область Q1 отображается так, что ее ширина становится меньше в направлении от рекомендованного для движения участка P1 к другому участку. Как описано выше, переходная область Q1 отображается так, что ее рисунок изменяется больше в направлении от рекомендованного для движения участка P1 к другому участку, и это может уменьшать ощущение водителем странности вследствие отображения конечной точки участка без обеспечения какого-либо предварительного оповещения.
[0026] В примерах, иллюстрированных в частях (a)-(c) на фиг. 2, дисплей 60 отображает переходную область Q1, так что конечная точка переходной области Q1 совпадает с конечной точкой P1E рекомендованного для движения участка P1. Таким образом дисплей 60 может оповещать водителя о том, что транспортное средство V приближается к крайней точке P1E, заранее без возникновения ощущения странности.
[0027] Кроме того, как иллюстрировано в части (a) на фиг. 3, дисплей 60 может отображать переходную область Q1 так, что начальная точка переходной области Q1 совпадает с конечной точкой P1E рекомендованного для движения участка P1. В качестве альтернативы, дисплей 60 может отображать переходную область Q1 так, что конечная точка P1E рекомендованного для движения участка P1 находится в переходной области Q1. Кроме того, переходная область Q1 может быть расположена в положении около конечной точки P1E рекомендованного для движения участка P1.
[0028] Например, как иллюстрировано в частях (a)-(c) на фиг. 4, дисплей 60 отображает рекомендованный для объезда участок P2, заданный для полосы движения, по которой движется транспортное средство V, и переходную область Q2 рядом с начальной точкой P2S рекомендованного для объезда участка P2, согласно управлению посредством процессора 56 отображения.
[0029] Рекомендованный для объезда участок P2, исключающий переходную область Q2, отображается теплым цветом, таким как, например, красный, так что пассажир может интуитивно распознавать рекомендованный для объезда участок P2 (см. штриховку линиями, протягивающимися вверх и влево). В примере, иллюстрированном в части (a) на фиг. 4, переходная область Q2 отображается так, что ее рисунок изменяется от разреженного до плотного в направлении от другого участка к рекомендованному для объезда участку P2. В примере, иллюстрированном в части (b) на фиг. 4, переходная область Q2 отображается так, что ее цвет изменяется с цвета другого участка на цвет рекомендованного для объезда участка P2 в направлении от другого участка к рекомендованному для объезда участку P2. В примере, иллюстрированном в части (c) на фиг. 4, переходная область Q2 отображается так, что ее ширина становится больше в направлении от другого участка к рекомендованному для объезда участку P2. Как описано выше, переходная область Q2 отображается так, что ее рисунок изменяется больше в направлении от другого участка к рекомендованному для объезда участку P2, и это может уменьшать ощущение водителем странности вследствие отображения начальной точки участка без обеспечения какого-либо предварительного оповещения.
[0030] В примерах, иллюстрированных в частях (a)-(c) на фиг. 4, приведено описание случая, когда начальная точка переходной области Q2 совпадает с начальной точкой P2S рекомендованного для объезда участка P2. Однако, переходная область Q2 может быть отображена в другом положении. Например, как иллюстрировано в части (a) на фиг. 5, дисплей 60 может отображать переходную область Q2, так что конечная точка переходной области Q2 совпадает с начальной точкой P2S рекомендованного для объезда участка P2. В качестве альтернативы, дисплей 60 может отображать переходную область Q2 так, что начальная точка P2S рекомендованного для объезда участка P2 находится в переходной области Q2. Кроме того, переходная область Q2 может быть отображена в положении около начальной точки P2S рекомендованного для объезда участка P2. Таким образом, дисплей 60 может оповещать водителя о том, что транспортное средство V приближается к начальной точке P2S, заранее без возникновения ощущения странности.
[0031] (Способ отображения полосы движения)
Пример операций устройства отображения полосы движения согласно варианту осуществления описан со ссылкой на блок-схему на фиг. 6.
[0032] На этапе S1 модуль 51 получения положения получает текущее положение транспортного средства V в картографической информации 41 на основании текущего положения, которое измеряется посредством устройства 10 измерения положения, и интервала перемещения транспортного средства V и положения транспортного средства V относительно признаков, которые обнаруживаются посредством группы 30 датчиков.
[0033] На этапе S2 модуль 52 задания маршрута ищет маршрут, протягивающийся от текущего положения, полученного посредством модуля 51 получения положения, до пункта назначения транспортного средства V, заданного с помощью I/F 70 ввода в картографической информации 41, и задает этот маршрут в качестве маршрута движения.
[0034] На этапе S3 модуль 53 получения информации получает информацию о дорожном движении по каждой полосе движения дороги, по которой движется транспортное средство V, из I/F 20 связи, картографической информации 41 и т.п.
[0035] На этапе S4 модуль 54 задания участка задает участок, указанный посредством информации о дорожном движении, полученной посредством модуля 53 получения информации, для каждой полосы движения дороги, по которой движется транспортное средство V, в качестве информационного участка, на котором некоторая информация должна быть сообщена водителю транспортного средства V.
[0036] На этапе S5 модуль 55 задания области задает переходную область, указывающую переход от или на информационный участок, заданный посредством модуля 54 задания участка, рядом по меньшей мере с одним из начальной точки и конечной точки информационного участка.
[0037] На этапе S6 процессор 56 отображения отображает, на дисплее 60, дорогу, по которой движется транспортное средство V, информационный участок, заданный посредством модуля 54 задания участка, и переходную область, заданную посредством модуля 55 задания области, в зависимости от текущего положения транспортного средства V.
[0038] Как описано выше, устройство отображения полосы движения согласно варианту осуществления настоящего изобретения отображает переходную область, позволяя водителю распознавать переход по меньшей мере в одной из начальной точки и конечной точки конкретного участка полосы движения. Соответственно, устройство отображения полосы движения может уменьшать замешательство водителя, вызванное отображением начальной точки или конечной точки участка без обеспечения какого-либо предварительного оповещения.
[0039] Кроме того, устройство отображения полосы движения согласно варианту осуществления настоящего изобретения отображает переходную область рядом с конечной точкой рекомендованного для движения участка и может, таким образом, оповещать водителя о том, что полоса движения, по которой движется транспортное средство V, не будет больше рекомендованной для движения полосой движения, заранее без возникновения ощущения странности.
[0040] Кроме того, устройство отображения полосы движения согласно варианту осуществления настоящего изобретения отображает переходную область рядом с начальной точкой рекомендованного для объезда участка и может, таким образом, оповещать водителя о том, что полоса движения, по которой движется транспортное средство V, будет рекомендованной для объезда полосой движения, заранее без возникновения ощущения странности.
[0041] (Первый модифицированный пример)
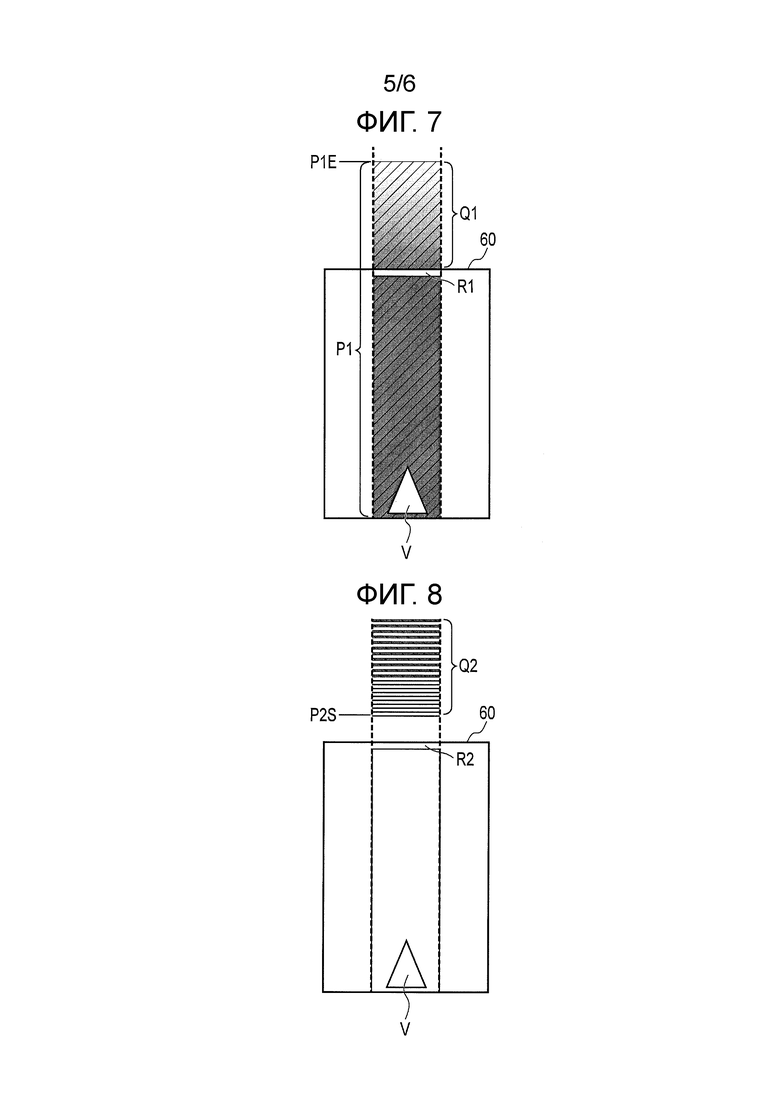
Устройство отображения полосы движения согласно первому модифицированному примеру варианта осуществления настоящего изобретения отличается от устройства в вышеупомянутом варианте осуществления в том, что, как иллюстрировано на фиг. 7, дисплей 60 отображает полосу R1 предварительного оповещения, оповещающую водителя о том, что текущее положение транспортного средства V в картографической информации 41 приближается к конечной точке P1E рекомендованного для движения участка P1.
[0042] В частности, процессор 50 функционирует как блок оповещения, выполненный с возможностью оповещения водителя о том, что транспортное средство V приближается к конечной точке P1E, когда транспортное средство V приближается к конечной точке P1E в картографической информации 41. Когда расстояние до конечной точки P1E достигает или падает ниже предварительно определенного порогового значения, процессор 50 отображает полосу R1 предварительного оповещения, мигающую с некоторым циклом на дисплее 60. Цикл мигания полосы R1 предварительного оповещения становится короче, когда транспортное средство V приближается к конечной точке P1E, и отображение полосы R1 предварительного оповещения прекращается, когда текущее положение транспортного средства V перемещается за пределы рекомендованного для движения участка P1. В примере, иллюстрированном на фиг. 7, полоса R1 предварительного оповещения отображается на верхнем крае дисплея 60, и это указывает, что переходная область Q1 и конечная точка P1E еще не отображаются на дисплее 60.
[0043] Аналогично, как иллюстрировано на фиг. 8, процессор 50 может отображать полосу R2 предварительного оповещения, уведомляющую водителя о том, что транспортное средство V приближается к начальной точке P2S рекомендованного для объезда участка P2, на дисплее 60. В частности, процессор 50 функционирует как блок оповещения, выполненный с возможностью оповещения водителя о том, что транспортное средство V приближается к конечной точке P2S, когда транспортное средство V приближается к начальной точке P2S в картографической информации 41. Когда расстояние до начальной точки P2S достигает или падает ниже предварительно определенного порогового значения, процессор 50 отображает полосу R2 предварительного оповещения, мигающую с некоторым циклом на дисплее 60. Например, цикл мигания полосы R2 предварительного оповещения становится короче, когда транспортное средство V достигает начальной точки P2S, и отображение полосы R2 предварительного оповещения прекращается, когда транспортное средство V въезжает в рекомендованный для объезда участок P2. Отметим, что процессор 50 может оповещать водителя о начальной точке или конечной точке информационного участка, воспроизводя звуки из динамика 80.
[0044] Как описано выше, устройство отображения полосы движения согласно первому модифицированному примеру варианта осуществления настоящего изобретения оповещает водителя о том, что транспортное средство V приближается по меньшей мере к одной из начальной точки и конечной точки информационного участка, и может, таким образом, оповещать водителя о переходе с или на информационный участок заранее без возникновения ощущения странности. Кроме того, устройство отображения полосы движения согласно первому модифицированному примеру варианта осуществления настоящего изобретения изменяет степень оповещения в зависимости от положения транспортного средства V относительно информационного участка и может, таким образом, оповещать водителя о приближении по меньшей мере к одному из начальной точки и конечной точки участка, с ещё меньшим ощущением странности.
[0045] (Второй модифицированный пример)
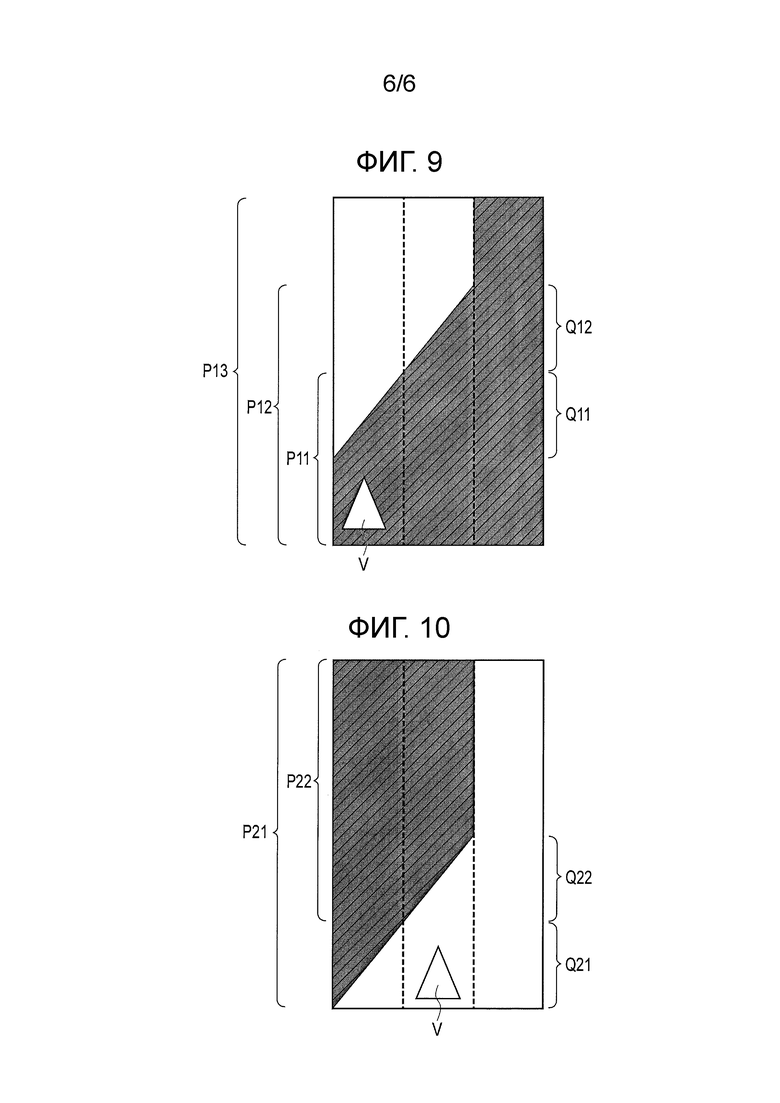
Устройство отображения полосы движения согласно второму модифицированному примеру варианта осуществления настоящего изобретения отличается от устройства вышеупомянутого варианта осуществления в том, что, как иллюстрировано на фиг. 9, когда транспортное средство V движется по дороге с множеством полос движения, устройство отображения полосы движения отображает переходные области Q11, Q12, чтобы способствовать смене полосы движения на полосу движения, по которой транспортное средство V не движется.
[0046] Пример, иллюстрированный на фиг. 9, иллюстрирует случай, когда транспортное средство V движется в левой крайней полосе движения дороги с тремя полосами движения на одной стороне, и рекомендованные для движения участки P11, P12, P13 задаются в таком порядке от левого края. Так как рекомендованные для движения участки P11, P12 из этих участков вскоре закончатся, транспортному средству V рекомендуется выполнять смену полосы движения на правую крайнюю полосу движения. Как иллюстрировано на фиг. 9, переходные области Q11, Q12, заданные соответственно рядом с конечными точками рекомендованного для движения участка P11, P12, имеют рисунок, дальний конец которого наклонен в правую сторону, на которой присутствует целевая полоса движения, в то же время протягиваясь в направлении движения транспортного средства V.
[0047] Пример, иллюстрированный на фиг. 10, иллюстрирует случай, когда транспортное средство V движется по центральной полосе движения дороги с тремя полосами движения на одной стороне, и рекомендованные для объезда участки P21, P22 задаются соответственно в левой крайней полосе и центральной полосе. Так как рекомендованные для объезда участки P21, P22 вскоре закончатся, транспортному средству V рекомендуется выполнять смену полосы движения на правую крайнюю полосу движения. Как иллюстрировано на фиг. 10, переходные области Q21, Q22, заданные соответственно рядом с начальными точками рекомендованных для объезда участков P21, P22, имеют рисунок, ближний конец которого наклонен в правую сторону, на которой присутствует целевая полоса движения, в то же время протягиваясь в направлении движения транспортного средства V.
[0048] Как описано выше, когда существует другая полоса движения, которая должна быть целевой, устройство отображения полосы движения согласно второму модифицированному примеру варианта осуществления настоящего изобретения отображает переходные области Q так, что переходные области Q направляются на целевую область. Устройство отображения полосы движения согласно второму модифицированному примеру варианта осуществления настоящего изобретения может, таким образом, оповещать водителя о том, что транспортное средство V приближается по меньшей мере к одной из начальной точки и конечной точки участка, без возникновения ощущения странности и может также направлять транспортное средство V на целевую полосу движения.
[0049] (Другие варианты осуществления)
Хотя настоящее изобретение описано выше посредством использования вышеуказанного варианта осуществления, не следует понимать, что описание и чертежи, составляющие часть этого описания, ограничивают настоящее изобретение. Из этого описания изобретения различные альтернативные варианты осуществления, примеры и технологии работы будут найдены специалистами в данной области техники.
[0050] Например, в вышеупомянутом варианте осуществления, полоса движения транспортного средства V, для которой информационный участок и т.п. отображаются, не ограничивается полосой движения на маршруте, заданном посредством модуля 52 задания маршрута. Модуль 53 получения информации может получать информацию о дорожном движении по каждой из полос движения на дороге, по которой транспортное средство V движется из текущего положения, полученного посредством модуля 51 получения положения.
[0051] Кроме того, настоящее изобретение включает в себя различные варианты осуществления и т.п., которые не описаны в данном документе, такие как конфигурации, взаимно допускающие вышеупомянутые конфигурации как само собой разумеющееся. Соответственно, технический объём настоящего изобретения должен определяться только сведениями, характеризующими изобретение в объёме формулы изобретения, считающимися подходящими на основании вышеупомянутого описания.
[0052] Кроме того, функции, описанные в варианте осуществления настоящего изобретения, могут быть выполнены посредством одной или множества схем обработки. Схема обработки включает в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Схема обработки может включать в себя устройства, такие как компоненты схемы и специализированная интегральная схема (ASIC), предназначенные для выполнения описанных функций.
Промышленная применимость
[0053] Настоящее изобретение может обеспечивать устройство отображения полосы движения и способ отображения полосы движения, которые могут уменьшать замешательство водителя путём отображения области, указывающей на переход от участка полосы движения или к нему.
Список условных обозначений
[0054] 40 запоминающее устройство
41 картографическая информация
50 процессор (блок оповещения)
51 модуль получения положения
52 модуль задания маршрута
53 модуль получения информации
54 модуль задания участка
55 модуль задания области
56 процессор отображения
60 дисплей
Изобретение относится к устройству и способу отображения полосы движения. Способ, реализуемый устройством отображения полосы движения, включает шаги, на которых получают информацию о дорожном движении, указывающую конкретный участок для каждой из полос движения. Отображают конкретный участок на полосе движения, по которой движется транспортное средство. Отображают переходную область, указывающую на переход относительно упомянутого конкретного участка, рядом по меньшей мере с одним из начальной точки или конечной точки конкретного участка. Причем рисунок переходной области изменяется больше в направлении по меньшей мере одного из начальной точки или конечной точки. Обеспечивается отображение полосы движения для помощи водителю в смене полосы движения. 2 н. и 4 з.п. ф-лы, 10 ил.
1. Устройство отображения полосы движения, содержащее:
запоминающее устройство, выполненное с возможностью хранения картографической информации, включающей в себя полосы движения на каждой из дорог;
модуль получения положения, выполненный с возможностью получения текущего положения транспортного средства в картографической информации;
модуль получения информации, выполненный с возможностью получения информации о дорожном движении для конкретного участка для каждой из полос движения; и
дисплей, выполненный с возможностью отображения упомянутого конкретного участка на полосе движения, по которой движется транспортное средство, на основании информации о дорожном движении и в зависимости от положения транспортного средства,
при этом дисплей выполнен с возможностью отображения переходной области относительно упомянутого конкретного участка рядом по меньшей мере с одним из начальной точки или конечной точки упомянутого конкретного участка таким образом, что рисунок переходной области изменяется больше в направлении по меньшей мере одного из начальной точки или конечной точки.
2. Устройство отображения полосы движения по п. 1, в котором дисплей отображает переходную область рядом с конечной точкой упомянутого конкретного участка, когда упомянутый конкретный участок является участком, по которому рекомендуется движение.
3. Устройство отображения полосы движения по п. 1 или 2, в котором дисплей отображает переходную область рядом с начальной точкой упомянутого конкретного участка, когда упомянутый конкретный участок является участком, которого рекомендуется избегать.
4. Устройство отображения полосы движения по п. 1 или 2, дополнительно содержащий блок оповещения, выполненный с возможностью обеспечения оповещения о том, что транспортное средство приближается по меньшей мере к одному из начальной точки и конечной точки упомянутого конкретного участка, когда транспортное средство приближается по меньшей мере к одному из начальной точки и конечной точки.
5. Устройство отображения полосы движения по п. 4, в котором блок оповещения изменяет степень оповещения в зависимости от положения транспортного средства относительно упомянутого конкретного участка.
6. Способ отображения полосы движения, содержащий этапы, на которых:
получают текущее положение транспортного средства в картографической информации, включающей в себя полосы движения на каждой из дорог;
получают информацию о дорожном движении для конкретного участка для каждой из полос;
отображают упомянутый конкретный участок на полосе движения, по которой движется транспортное средство, на основании информации о дорожном движении и в зависимости от положения транспортного средства; и
отображают переходную область относительно упомянутого конкретного участка рядом по меньшей мере с одним из начальной точки или конечной точки упомянутого конкретного участка таким образом, что рисунок переходной области изменяется больше в направлении по меньшей мере одного из начальной точки или конечной точки.
| СИСТЕМА И ПРОГРАММА ПРОВОДКИ ПО МАРШРУТУ | 2007 |
|
RU2400710C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ КАРТЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОТОБРАЖЕНИЯ КАРТЫ | 2009 |
|
RU2404409C1 |

