Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи при отображении и способу помощи при отображении.
Уровень техники
[0002] На сегодня известна технология, в которой комбинированное изображение в качестве вида из виртуальной точки обзора формируется с использованием изображений, захваченных посредством множества камер, смонтированных на транспортном средстве (патентный документ 1). В патентном документе 1, комбинированное изображение отображается на дисплее, чтобы уведомлять водителя в отношении окружения (например, движущегося сзади транспортного средства) около рассматриваемого транспортного средства.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2012-253428
Сущность изобретения
Техническая задача
[0004] Тем не менее, в случае если виртуальная точка обзора задается позади рассматриваемого транспортного средства, аналогично патентному документу 1, позиция виртуальной точки обзора перемещается с рулением водителя. Затем по мере того, как позиция виртуальной точки обзора перемещается, движущееся сзади транспортное средство, отображаемое в комбинированном изображении, может исчезать, затрудняя для водителя выяснение ситуации около рассматриваемого транспортного средства.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы, и его задача заключается в том, чтобы предоставлять устройство помощи при отображении и способ помощи при отображении, которые обеспечивают возможность водителю выяснять ситуацию около рассматриваемого транспортного средства посредством управления позицией виртуальной точки обзора на основе руления.
Решение задачи
[0006] Устройство помощи при отображении согласно аспекту настоящего изобретения определяет угол поворота при рулении транспортного средства и изменяет позицию виртуальной точки обзора на основе упомянутого определенного угла поворота при рулении.
Преимущества изобретения
[0007] Согласно настоящему изобретению, водитель может выяснять ситуацию около рассматриваемого транспортного средства как результат управления позицией виртуальной точки обзора на основе руления.
Краткое описание чертежей
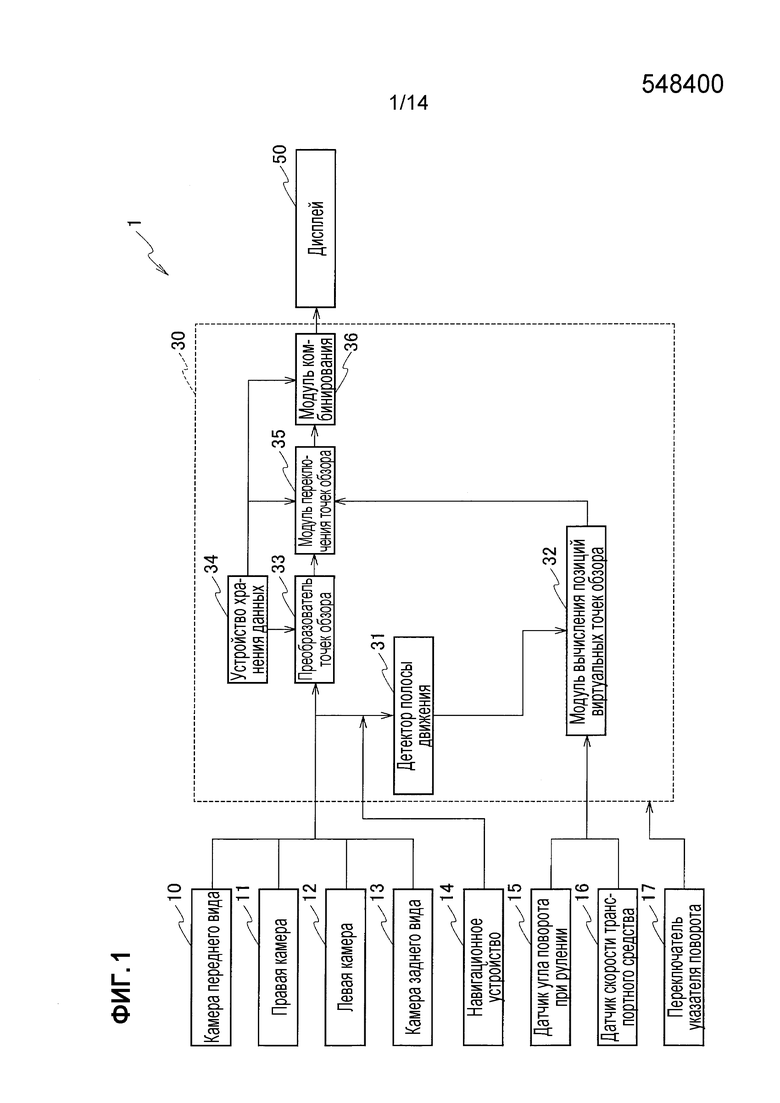
[0008] Фиг. 1 является блок-схемой устройства помощи при отображении согласно первому варианту осуществления настоящего изобретения.
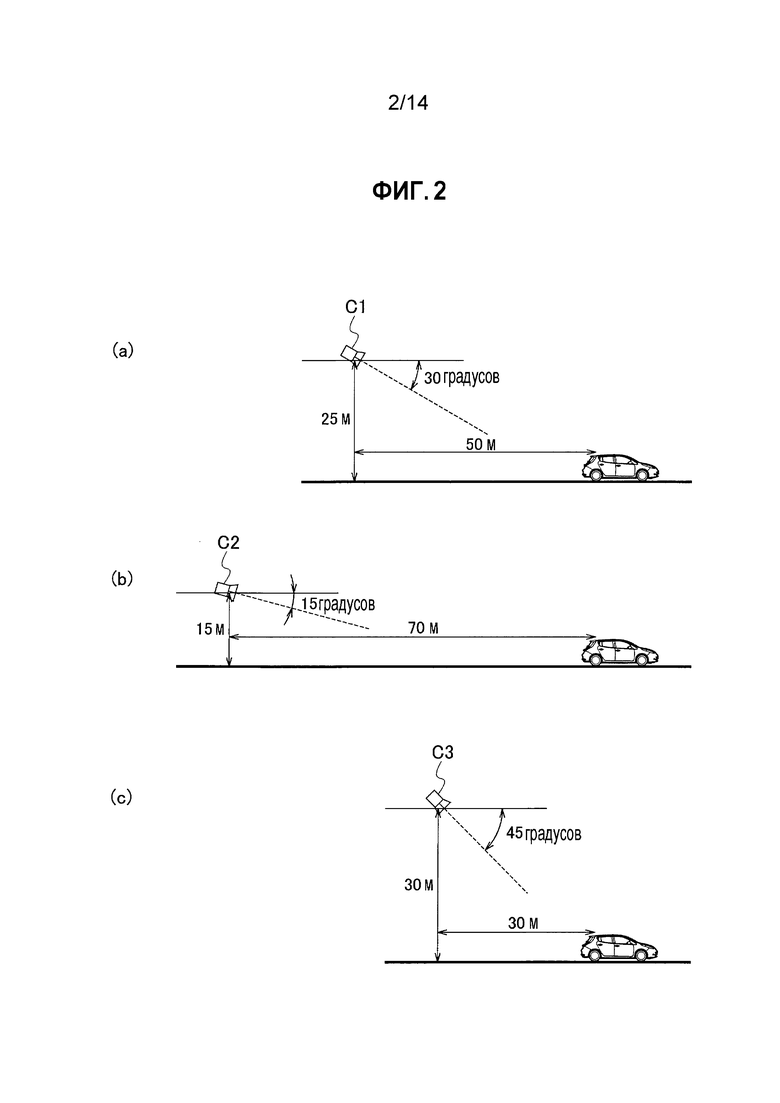
Часть (a) по фиг. 2 является схемой, поясняющей позицию виртуальной точки обзора в случае движения на опорной скорости, часть (b) по фиг. 3 является схемой, поясняющей позицию виртуальной точки обзора в случае движения на скорости выше опорной скорости, и часть (c) по фиг. 3 является схемой, поясняющей позицию виртуальной точки обзора в случае движения на скорости ниже опорной скорости.
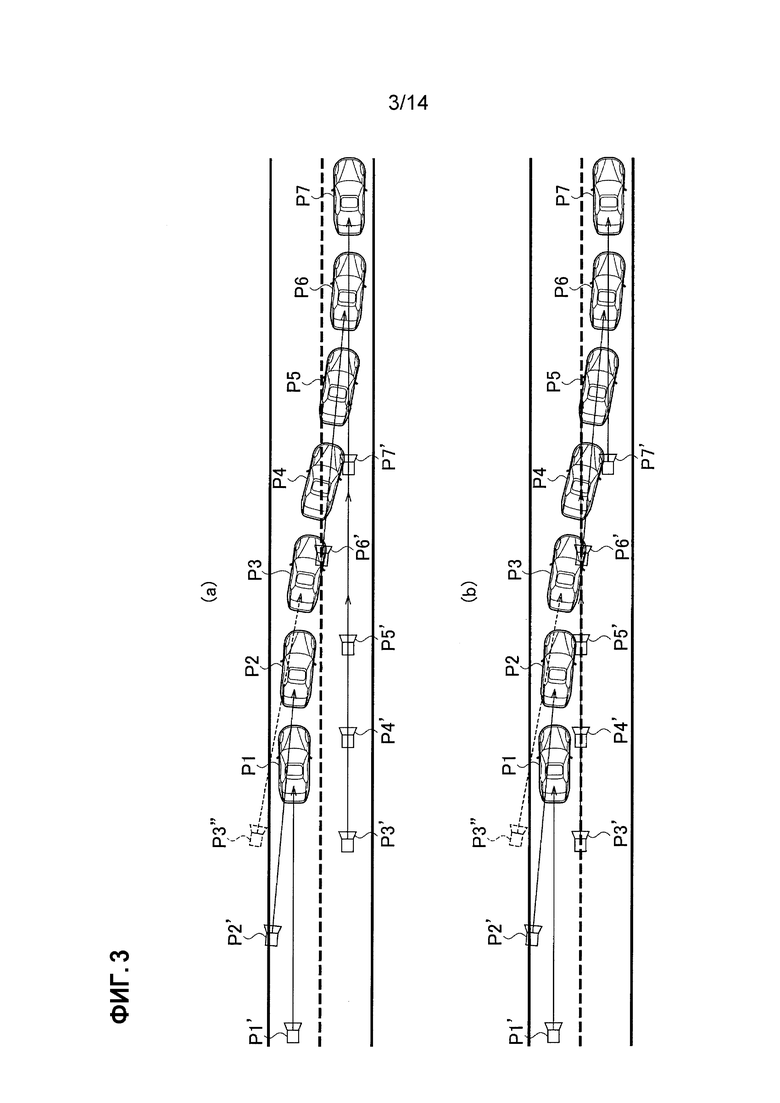
Части (a) и (b) по фиг. 3 являются схемами, поясняющими позиции виртуальных точек обзора, измененные посредством устройства помощи при отображении согласно первому варианту осуществления настоящего изобретения.
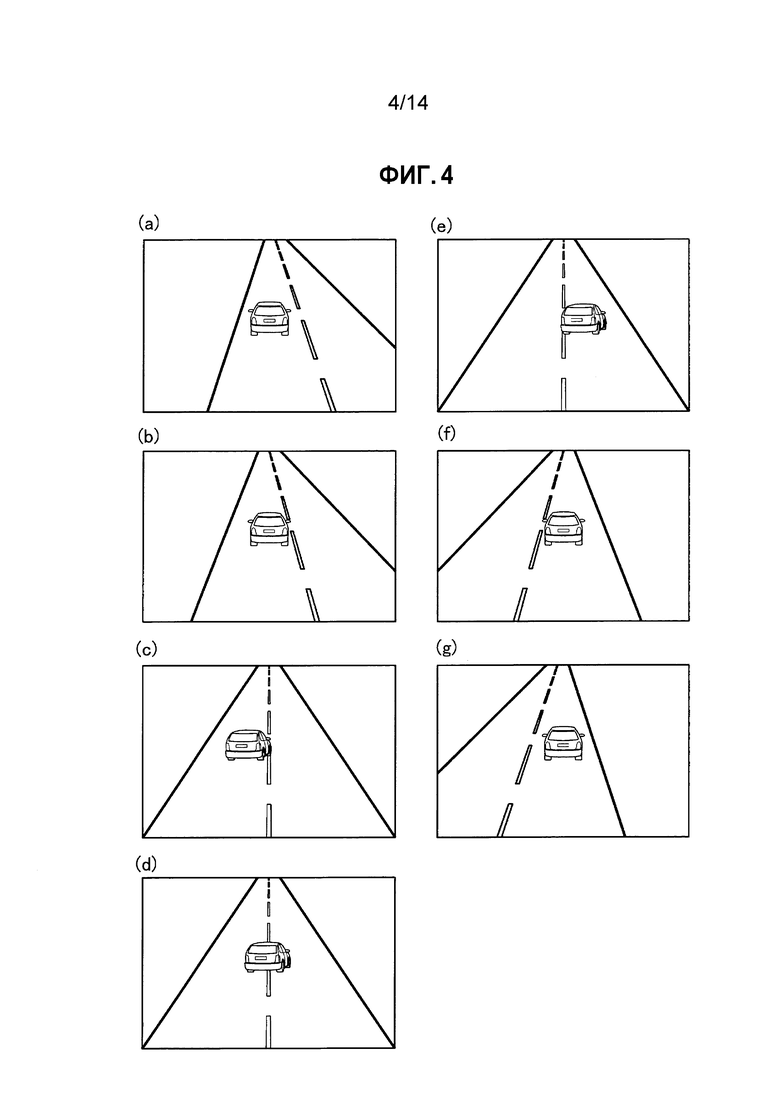
Части (a)-(g) по фиг. 4 являются схемами, поясняющими изображения, отображаемые на дисплее посредством устройства помощи при отображении согласно первому варианту осуществления настоящего изобретения.
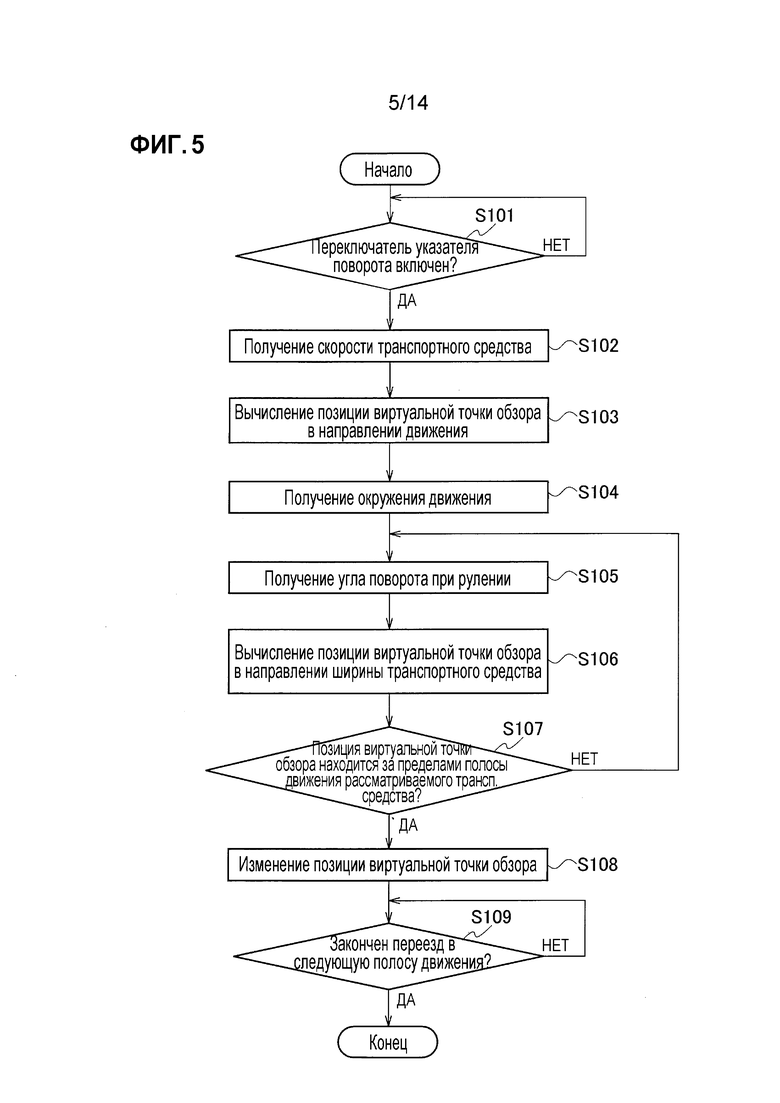
Фиг. 5 является блок-схемой последовательности операций способа, поясняющей пример работы устройства помощи при отображении согласно первому варианту осуществления настоящего изобретения.
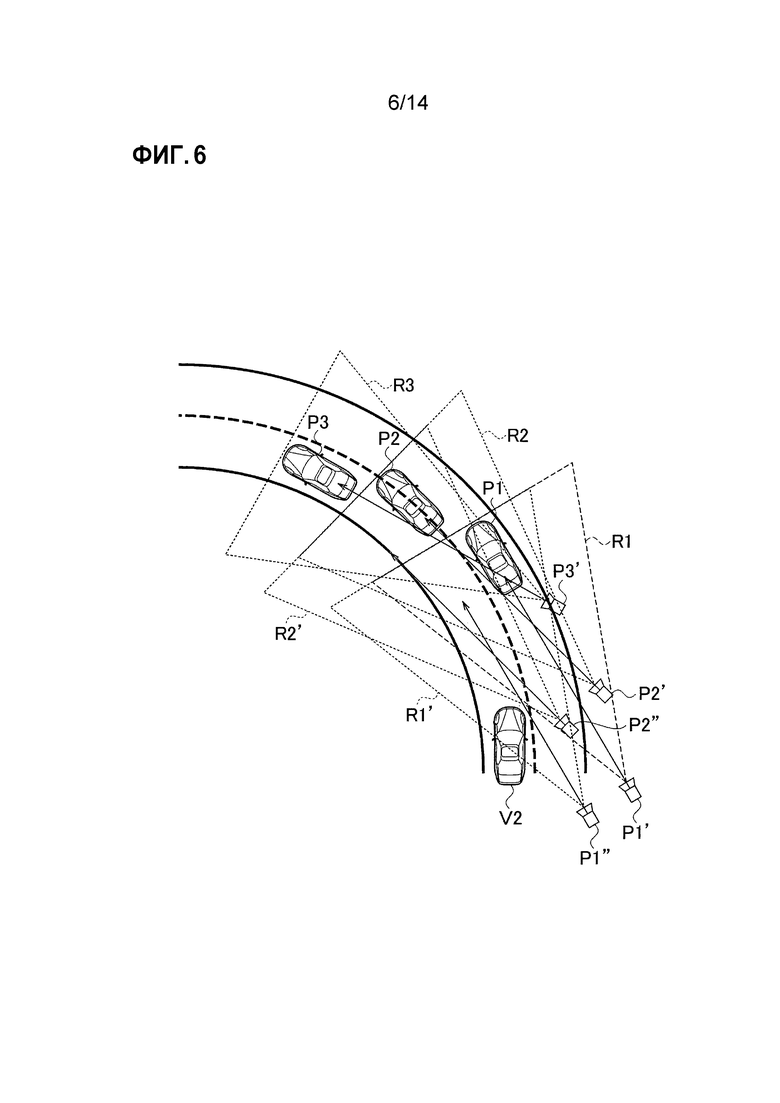
Фиг. 6 является схемой, поясняющей позицию виртуальной точки обзора, измененную посредством устройства помощи при отображении согласно второму варианту осуществления настоящего изобретения.
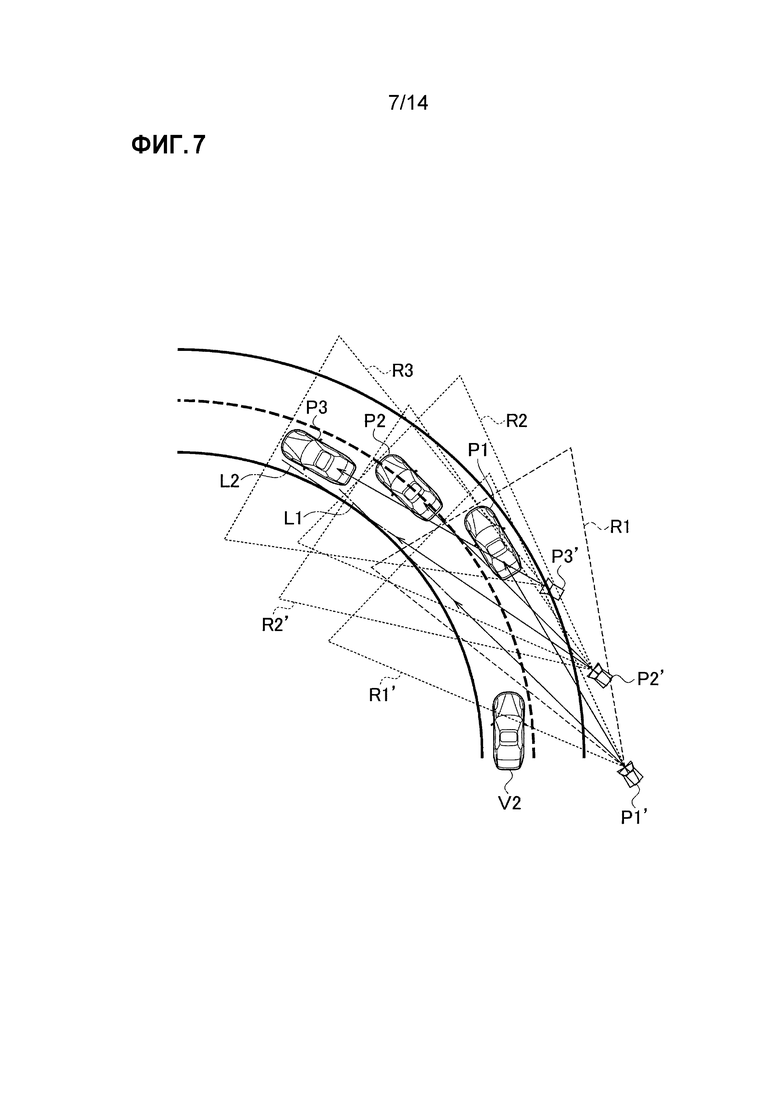
Фиг. 7 является схемой, поясняющей позицию виртуальной точки обзора, измененную посредством устройства помощи при отображении согласно второму варианту осуществления настоящего изобретения.
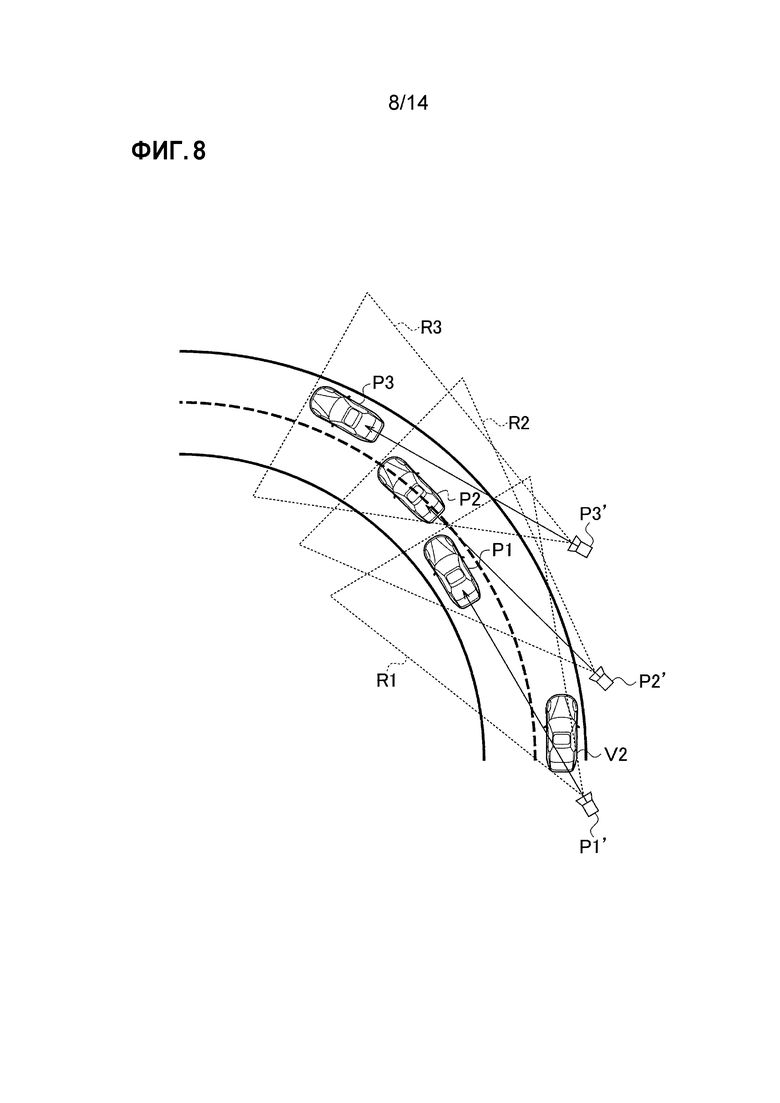
Фиг. 8 является другой схемой, поясняющей позицию виртуальной точки обзора, измененную посредством устройства помощи при отображении согласно второму варианту осуществления настоящего изобретения.
Фиг. 9 является блок-схемой последовательности операций способа, поясняющей пример работы устройства помощи при отображении согласно второму варианту осуществления настоящего изобретения.
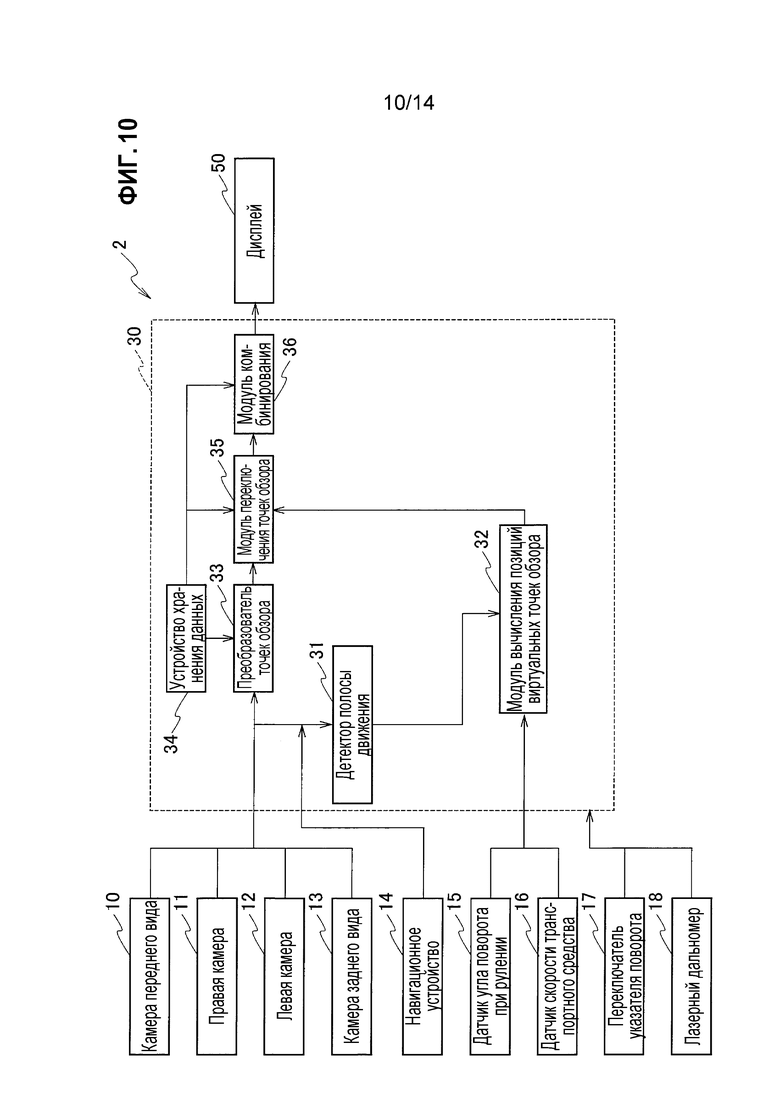
Фиг. 10 является блок-схемой устройства помощи при отображении согласно третьему варианту осуществления настоящего изобретения.
Части (a) и (b) по фиг. 11 являются схемами, поясняющими позицию виртуальной точки обзора, измененную посредством устройства помощи при отображении согласно третьему варианту осуществления настоящего изобретения.
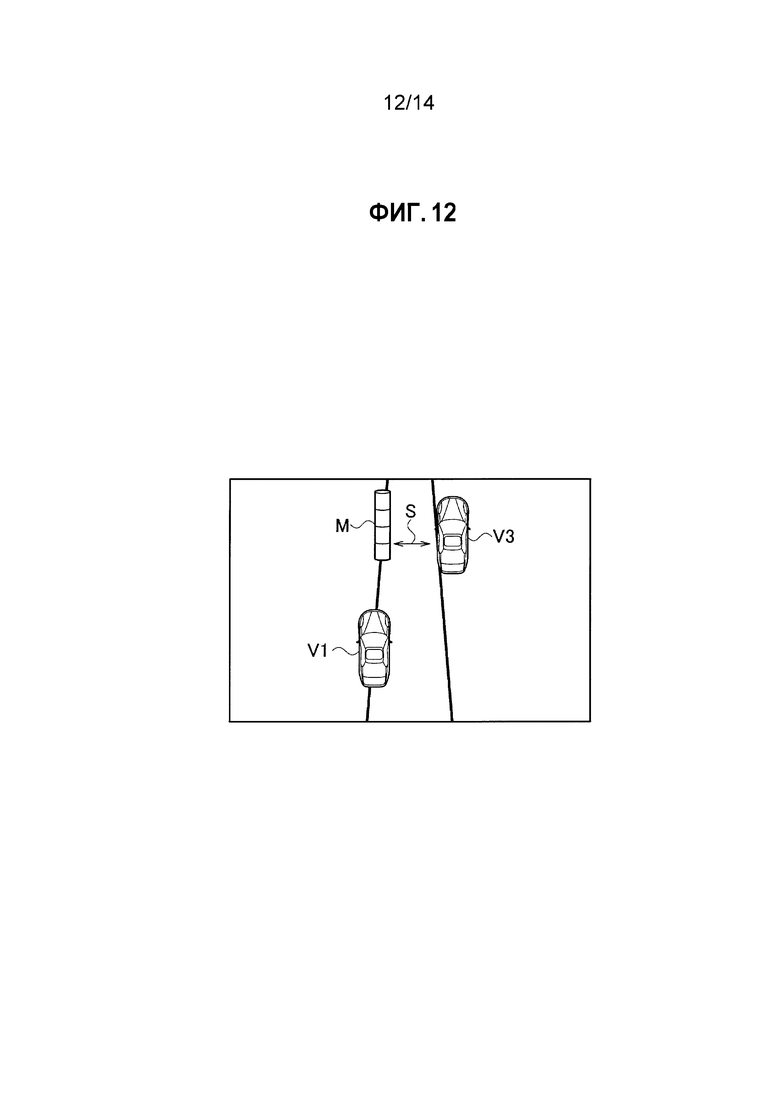
Фиг. 12 является схемой, поясняющей изображение, отображаемое на дисплее посредством устройства помощи при отображении согласно третьему варианту осуществления настоящего изобретения.
Фиг. 13 является блок-схемой последовательности операций способа, поясняющей пример работы устройства помощи при отображении согласно третьем варианту осуществления настоящего изобретения.
Часть (a)-(c) по фиг. 14 являются схемами, поясняющими примеры отображения, отображаемые на дисплее посредством устройств помощи при отображении согласно другим вариантам осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. В иллюстрации чертежей, идентичные части обозначаются посредством идентичной ссылки с номером, и их описание опускается. Кроме того, в первом варианте осуществления описывается случай, в котором рассматриваемое транспортное средство движется на прямой дороге, и во втором варианте осуществления описывается случай, в котором рассматриваемое транспортное средстве движется на кривой.
[0010] Первый вариант осуществления
Устройство 1 помощи при отображении согласно первому варианту осуществления описывается со ссылкой на фиг. 1. Как проиллюстрировано на фиг. 1, устройство 1 помощи при отображении включает в себя камеру 10 переднего вида, правую камеру 11, левую камеру 12, камеру 13 заднего вида, навигационное устройство 14, датчик 15 угла поворота при рулении, датчик 16 скорости транспортного средства, переключатель 17 указателя поворота, контроллер 30 и дисплей 50.
[0011] Камера 10 переднего вида, правая камера 11, левая камера 12 и камера 13 заднего вида (модули формирования изображений) представляют собой камеры с элементом формирования изображений, таким как CCD (прибор с зарядовой связью) или CMOS (комплементарная структура "металл-оксид-полупроводник"), и устанавливаются в позициях, из которых они могут захватывать изображения передней, правой, левой и задней сторон рассматриваемого транспортного средства, соответственно. Эти камеры выводят захваченные изображения в контроллер 30.
Следует отметить, что в нижеприведенном описании, четыре камеры, а именно, камера 10 переднего вида, правая камера 11, левая камера 12 и камера 13 заднего вида, описываются "как камера 10 переднего вида и т.п.".
[0012] Навигационное устройство 14 включает в себя приемное GPS-устройство и картографическую базу данных и вычисляет маршрут движения в пункт назначения, заданный пассажиром, посредством использования местоположения рассматриваемого транспортного средства, обнаруженного посредством приемного GPS-устройства и картографической базы данных. Навигационное устройство 14 выводит вычисленный маршрут движения в контроллер 30. Следует отметить, что картографическая база данных может сохраняться на сервере вместо навигационного устройства 14. В случае если картографическая база данных сохраняется на сервере, навигационное устройство 14 может получать картографическую информацию по мере необходимости через связь.
[0013] Датчик 15 угла поворота при рулении определяет угол поворота при рулении рассматриваемого транспортного средства и выводит определенный угол поворота при рулении в контроллер 30.
[0014] Датчик 16 скорости транспортного средства определяет скорость рассматриваемого транспортного средства из числа оборотов его колес и выводит определенную скорость в контроллер 30.
[0015] Переключатель 17 указателя поворота устанавливается около руля и обнаруживает направление поворота, когда рассматриваемое транспортное средство поворачивает направо или налево, либо когда рассматриваемое транспортное средство выполняет смену полосы движения. Переключатель 17 указателя поворота выводит обнаруженное направление поворота в контроллер 30.
[0016] Контроллер 30 представляет собой устройство, которое формирует комбинированное изображение, которое должно отображаться на дисплее 50, посредством использования изображений, снятых камерой, угла поворота при рулении и т.д. и представляет собой, например, компьютер, включающий в себя CPU, ROM и RAM, а также шину данных и интерфейсы ввода-вывода, соединяющие их. При рассмотрении с точки зрения функции, контроллер 30 может разделяться на детектор 31 полосы движения, модуль 32 вычисления позиций виртуальных точек обзора, преобразователь 33 точек обзора, устройство 34 хранения данных, модуль 35 переключения точек обзора и модуль 36 комбинирования.
[0017] Детектор 31 полосы движения обнаруживает полосы движения на дороге, включающие в себя полосу движения, в которой движется рассматриваемое транспортное средство (в дальнейшем называемую просто "полосой движения рассматриваемого транспортного средства"), посредством получения информации из изображений, захваченных посредством камеры 10 переднего вида и т.п., и навигационного устройства 14. Детектор 31 полосы движения также обнаруживает граничные линии, к примеру, разделительные полосы и краевую линию, которая служит для того, чтобы отличать между полосой движения и областью за пределами полосы движения.
[0018] Модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию виртуальной точки обзора для слежения за рассматриваемым транспортным средством с задней стороны в воздухе (в дальнейшем называемую просто "позицией виртуальной точки обзора"), посредством использования угла поворота при рулении и скорости транспортного средства, полученных из датчика 15 угла поворота при рулении и датчика 16 скорости транспортного средства. Более конкретно, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию виртуальной точки обзора в направлении движения рассматриваемого транспортного средства посредством использования скорости транспортного средства и вычисляет позицию виртуальной точки обзора в направлении ширины транспортного средства для рассматриваемого транспортного средства посредством использования угла поворота при рулении. Следует отметить, что хотя первый вариант осуществления описывается при условии, что позиция виртуальной точки обзора задается на центральной оси, идущей вдоль направления ширины транспортного средства для рассматриваемого транспортного средства, позиция виртуальной точки обзора не ограничена этим.
[0019] Преобразователь 33 точек обзора преобразует изображения, захваченные посредством камеры 10 переднего вида и т.п., в изображение сверху направленного вниз вида из виртуальной точки обзора посредством использования карты преобразования, сохраненной в устройстве 34 хранения данных.
[0020] Устройство 34 хранения данных сохраняет карту преобразования, которая должна использоваться посредством преобразователя 33 точек обзора, значок, который должен использоваться посредством модуля 36 комбинирования, и т.д.
[0021] Модуль 35 переключения точек обзора (модуль изменения) определяет то, находится или нет позиция виртуальной точки обзора, вычисленная посредством модуля 32 вычисления позиций виртуальных точек обзора, за пределами полосы движения рассматриваемого транспортного средства. Модуль 35 переключения точек обзора затем изменяет позицию виртуальной точки обзора в зависимости от результата определения. Ниже описываются подробности работы модуля 35 переключения точек обзора.
[0022] Модуль 36 комбинирования (модуль редактирования) формирует комбинированное изображение посредством наложения значка и/или т.п., сохраненного в устройстве 34 хранения данных на изображение сверху, преобразованное посредством преобразователя 33 точек обзора. Модуль 36 комбинирования затем выводит сформированное комбинированное изображение на дисплей 50.
[0023] Дисплей 50 (модуль отображения) представляет собой, например, жидкокристаллический дисплей, установленный на приборной панели, или жидкокристаллический дисплей, используемый для навигационного устройства 14, и отображает различные фрагменты информации пассажирам.
[0024] Далее описывается позиция виртуальной точки обзора в направлении движения рассматриваемого транспортного средства, вычисленная в соответствии со скоростью транспортного средства посредством модуля 32 вычисления позиций виртуальных точек обзора, со ссылкой на части (a), (b) и (c) по фиг. 2.
[0025] Во-первых, описывается позиция виртуальной точки обзора в случае, если рассматриваемое транспортное средство движется на опорной скорости, со ссылкой на часть (a) по фиг. 2. Опорная скорость не является конкретно ограниченной скоростью, а описывается, например, как 50 км/ч в первом варианте осуществления. Как проиллюстрировано в части (a) по фиг. 2, в случае если рассматриваемое транспортное средство движется на опорной скорости, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию C1 виртуальной точки обзора в качестве позиции на расстоянии в 50 м от рассматриваемого транспортного средства в направлении горизонтально назад и на расстоянии в 25 м от поверхности дороги в направлении вертикально вверх. Кроме того, модуль 32 вычисления позиций виртуальных точек обзора задает угол, сформированный между направлением линии взгляда, смотрящим вниз на рассматриваемое транспортное средство из позиции C1 виртуальной точки обзора (пунктирной линии в части (a) по фиг. 2), и горизонтальной плоскостью на высоте позиции C1 виртуальной точки обзора в 30 градусов.
[0026] Далее описывается позиция виртуальной точки обзора в случае, если рассматриваемое транспортное средство движется на скорости выше опорной скорости, например, 70 км/ч, со ссылкой на часть (b) по фиг. 2. Как проиллюстрировано в части (b) по фиг. 2, когда рассматриваемое транспортное средство движется на высокой скорости, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию C2 виртуальной точки обзора в качестве позиции дальше от рассматриваемого транспортного средства в обратном направлении и ниже от поверхности дороги, чем позиция C1 виртуальной точки обзора. В частности, как проиллюстрировано в части (b) по фиг. 2, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию C2 виртуальной точки обзора в качестве позиции на расстоянии в 70 м от рассматриваемого транспортного средства в направлении горизонтально назад и на расстоянии в 15 м от поверхности дороги в направлении вертикально вверх. Кроме того, модуль 32 вычисления позиций виртуальных точек обзора задает угол, сформированный между направлением линии взгляда, смотрящим вниз на рассматриваемое транспортное средство из позиции C2 виртуальной точки обзора (пунктирной линии в части (b) по фиг. 2), и горизонтальной плоскостью на высоте позиции C2 виртуальной точки обзора в 15 градусов. Таким образом, когда скорость является высокой, позиция C2 виртуальной точки обзора, проиллюстрированная в части (b) по фиг. 2, вычисляется. С помощью изображения сверху направленного вниз вида из позиции C2 виртуальной точки обзора, можно выяснять ситуацию широкой области позади рассматриваемого транспортного средства по сравнению с частью (a) по фиг. 2. Таким образом, в случае если движущееся сзади транспортное средство присутствует позади рассматриваемого транспортного средства, водитель может быстро осознавать присутствие движущегося сзади транспортного средства. Это облегчает для водителя выполнение въезда в поток или смены полосы движения.
[0027] Далее описывается позиция виртуальной точки обзора в случае, если рассматриваемое транспортное средство движется на скорости ниже опорной скорости, например, 30 км/ч, со ссылкой на часть (c) по фиг. 2. Как проиллюстрировано в части (c) по фиг. 2, когда рассматриваемое транспортное средство движется при низкой скорости, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию C3 виртуальной точки обзора в качестве позиции ближе от рассматриваемого транспортного средства в обратном направлении и выше от поверхности дороги, чем позиция C1 виртуальной точки обзора. В частности, как проиллюстрировано в части (c) по фиг. 2, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию C3 виртуальной точки обзора в качестве позиции на расстоянии в 30 м от рассматриваемого транспортного средства в направлении горизонтально назад и на расстоянии в 30 м от поверхности дороги в направлении вертикально вверх. Кроме того, модуль 32 вычисления позиций виртуальных точек обзора задает угол, сформированный между направлением линии взгляда, смотрящим вниз на рассматриваемое транспортное средство из позиции C3 виртуальной точки обзора (пунктирной линии в части (c) по фиг. 2), и горизонтальной плоскостью на высоте позиции C3 виртуальной точки обзора в 45 градусов. Таким образом, когда скорость является низкой, позиция C3 виртуальной точки обзора, проиллюстрированная в части (c) по фиг. 2, вычисляется. С помощью изображения сверху направленного вниз вида из позиции C3 виртуальной точки обзора, то, как ситуация около рассматриваемого транспортного средства изменяется, может легко выясняться по сравнению с частью (a) по фиг. 2. Таким образом, в случае если движущееся сзади транспортное средство присутствует позади рассматриваемого транспортного средства, водитель может легко проверять расстояние до движущегося сзади транспортного средства. Это облегчает для водителя выполнение въезда в поток или смены полосы движения.
[0028] Между тем, в примерах, проиллюстрированных в частях (a), (b) и (c) по фиг. 2, позиции виртуальных точек обзора описываются относительно одной опорной скорости, с точки зрения того, выше или ниже скорость транспортного средства этой опорной скорости. Тем не менее, опорная скорость не ограничена одной скоростью. Множество опорных скоростей могут задаваться (например, опорная скорость 1, опорная скорость 2, опорная скорость 1 > опорная скорость 2), скорость транспортного средства может разделяться на меньшие диапазоны и ассоциироваться с опорными скоростями, и позиция виртуальной точки обзора может вычисляться с ними.
[0029] Далее описываются позиции виртуальных точек обзора, измененные посредством модуля 35 переключения точек обзора, со ссылкой на части (a) и (b) по фиг. 3.
[0030] Окружение движения, проиллюстрированное в части (a) по фиг. 3, представляет собой окружение, в котором рассматриваемое транспортное средство, движущееся в левой полосе движения двухполосной дороги, выполняет смену полосы движения на правую полосу движения. Ссылки с номерами P1-P7, проиллюстрированные в части (a) по фиг. 3 обозначают позиции рассматриваемого транспортного средства. Кроме того, ссылки с номерами P1'-P7', проиллюстрированные в части (a) по фиг. 3 обозначают позиции виртуальных точек обзора, соответствующие позициям P1-P7 рассматриваемого транспортного средства, соответственно. Между тем, расстояние от рассматриваемого транспортного средства до позиции виртуальной точки обзора в направлении движения рассматриваемого транспортного средства (в дальнейшем называемое просто "расстоянием между рассматриваемым транспортным средством и виртуальной точкой обзора") предположительно должно задаваться в соответствии со скоростью рассматриваемого транспортного средства. Кроме того, стрелка, идущая из каждой позиции виртуальной точки обзора, указывает направление линии взгляда из виртуальной точки обзора.
[0031] В первом варианте осуществления, позиция виртуальной точки обзора присутствует на центральной оси, идущей вдоль направления ширины транспортного средства для рассматриваемого транспортного средства. По этой причине, когда водитель поворачивает руль в направлении по часовой стрелке в попытке выполнять смену полосы движения на правую полосу движения, рассматриваемое транспортное средство перемещается из позиции P1 рассматриваемого транспортного средства в позицию P2 рассматриваемого транспортного средства. В этот момент, позиция P1' виртуальной точки обзора перемещается в позицию P2' виртуальной точки обзора. Таким образом, позиция виртуальной точки обзора перемещается в соответствии с рулением водителя, т.е. углом поворота при рулении. Более конкретно, в позиции P1 рассматриваемого транспортного средства, руль находится в позиции нейтрали, и угол поворота при рулении равен 0 градусов. По мере того, как водитель поворачивает руль в направлении по часовой стрелке из позиции P1 рассматриваемого транспортного средства, угол поворота при рулении увеличивается. Модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию P2' виртуальной точки обзора в соответствии с увеличенным углом поворота при рулении. Состояние, в котором позиция виртуальной точки обзора перемещается в сочетании с углом поворота при рулении, как описано выше ниже, выражается как фиксированное относительно рассматриваемого транспортного средства состояние.
[0032] По мере того, как рассматриваемое транспортное средство затем перемещается из позиции P2 рассматриваемого транспортного средства в позицию P3 рассматриваемого транспортного средства с повернутым рулем, позиция P3'' виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства. По мере того, как позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства, как описано выше, информация относительно области позади рассматриваемого транспортного средства, захваченной посредством изображения сверху направленного вниз вида из виртуальной точки обзора, уменьшается. Например, движущееся сзади транспортное средство, отображаемое в изображении сверху до того, как позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства, может не отображаться в изображении сверху после того, как позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства. По этой причине, если позиция P3'' виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства, модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора на целевую полосу движения для смены полосы движения или правую полосу движения. В частности, как проиллюстрировано в части (a) по фиг. 3, модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора с позиции P3'' виртуальной точки обзора на позицию P3' виртуальной точки обзора. Таким образом, изображение сверху направленного вниз вида из позиции P3' виртуальной точки обзора может захватывать больший объем информации относительно области позади рассматриваемого транспортного средства, чем изображение сверху направленного вниз вида из позиции P3'' виртуальной точки обзора.
[0033] Ниже описывается способ определения того, находится или нет позиция виртуальной точки обзора за пределами полосы движения рассматриваемого транспортного средства. Это определение выполняется посредством модуля 35 переключения точек обзора.
[0034] В случае если рассматриваемое транспортное средство движется на прямой дороге, как проиллюстрировано в части (a) по фиг. 3, позиция виртуальной точки обзора может однозначно вычисляться из угла поворота при рулении и расстояния между рассматриваемым транспортным средством и виртуальной точкой обзора. Например, чем больше расстояние между рассматриваемым транспортным средством и виртуальной точкой обзора относительно угла поворота при рулении, тем дальше позиция виртуальной точки обзора находится от полосы движения рассматриваемого транспортного средства. Кроме того, чем больше угол поворота при рулении относительно расстояния между рассматриваемым транспортным средством и виртуальной точкой обзора, тем дальше позиция виртуальной точки обзора находится от полосы движения рассматриваемого транспортного средства. Таким образом, угол поворота при рулении и расстояние между рассматриваемым транспортным средством и виртуальной точкой обзора имеют корреляцию с расстоянием от полосы движения рассматриваемого транспортного средства до позиции виртуальной точки обзора. По этой причине, модуль 35 переключения точек обзора может определять то, находится или нет позиция виртуальной точки обзора за пределами полосы движения рассматриваемого транспортного средства, посредством обращения к карте, указывающей взаимосвязь между углом поворота при рулении и расстоянием от полосы движения рассматриваемого транспортного средства до позиции виртуальной точки обзора, и к карте, указывающей взаимосвязь между расстоянием между рассматриваемым транспортным средством и виртуальной точкой обзора и расстоянием от полосы движения рассматриваемого транспортного средства до позиции виртуальной точки обзора, которые получены заранее через тесты и моделирования. Следует отметить, что эти карты могут сохраняться в устройстве 34 хранения данных.
[0035] Снова возвращаясь к части (a) по фиг. 3, по мере того, как рассматриваемое транспортное средство движется передним ходом в позиции P4 и P5 рассматриваемого транспортного средства, позиция виртуальной точки обзора перемещается в позиции P4' и P5' виртуальных точек обзора, соответственно. В частности, после того, как модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора на позицию P3' виртуальной точки обзора, позиция виртуальной точки обзора не перемещается в сочетании с углом поворота при рулении, а остается фиксированной в направлении ширины транспортного средства и перемещается выше целевой полосы движения для смены полосы движения или правой полосы движения, при поддержании расстояния между рассматриваемым транспортным средством и виртуальной точкой обзора до тех пор, пока рассматриваемое транспортное средство не переедет в следующую полосу движения. Состояние, в котором позиция виртуальной точки обзора не перемещается в сочетании с углом поворота при рулении, а остается фиксированной в направлении ширины транспортного средства и перемещается выше полосы движения, как описано выше, ниже выражается как фиксированное относительно дороги состояние. Причина, по которой позиция виртуальной точки обзора находится в фиксированном относительно дороги состоянии до тех пор, пока рассматриваемое транспортное средство не переедет в следующую полосу движения, состоит в том, что изображение сверху должно захватывать больший объем информации относительно области позади рассматриваемого транспортного средства.
[0036] Затем после того, как рассматриваемое транспортное средство переезжает в следующую полосу движения, как проиллюстрировано посредством позиции P6 рассматриваемого транспортного средства, модуль 35 переключения точек обзора переключает позицию виртуальной точки обзора с фиксированного относительно дороги состояния на фиксированное относительно рассматриваемого транспортного средства состояние. Как результат, позиция виртуальной точки обзора перемещается из позиции P5' виртуальной точки обзора в позицию P6' виртуальной точки обзора. Затем, как проиллюстрировано посредством позиции P7 рассматриваемого транспортного средства, по мере того, как угол поворота при рулении достигает почти 0 градусов, позиция виртуальной точки обзора перемещается из позиции P6' виртуальной точки обзора в позицию P7' виртуальной точки обзора.
[0037] В примере, проиллюстрированном в части (a) по фиг. 3, позиция виртуальной точки обзора изменяется на место выше целевой полосы движения для смены полосы движения, когда позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства. Тем не менее, настоящее изобретение не ограничено этим. Например, как проиллюстрировано в части (b) по фиг. 3, позиция виртуальной точки обзора может изменяться на место выше разделительной полосы вместо места выше целевой полосы движения для смены полосы движения. Части (a)-(g) по фиг. 4 иллюстрируют пример изображений сверху, отображаемых на дисплее 50 в случае, если позиция виртуальной точки обзора изменяется, как проиллюстрировано в части (b) по фиг. 3.
[0038] Изображения сверху, проиллюстрированные в частях (a)-(g) по фиг. 4, соответствуют изображениям сверху направленных вниз видов из позиций P1'-P7' виртуальных точек обзора, проиллюстрированных в части (b) по фиг. 3, соответственно. Как проиллюстрировано в частях (a) и (b) по фиг. 4, позиция виртуальной точки обзора находится в фиксированном относительно рассматриваемого транспортного средства состоянии, т.е. перемещается в сочетании с углом поворота при рулении до тех пор, пока позиция виртуальной точки обзора не переместится за пределы полосы движения рассматриваемого транспортного средства. Как проиллюстрировано в частях (c)-(e) по фиг. 4, когда позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства, позиция виртуальной точки обзора задается как фиксированное относительно дороги состояние, и разделительная полоса отображается в центре изображения сверху до тех пор, пока рассматриваемое транспортное средство не переедет в следующую полосу движения. Таким образом, более широкая область позади рассматриваемого транспортного средства может отображаться. Если движущееся сзади транспортное средство присутствует в правой полосе движения, водитель может быстро осознавать присутствие движущегося сзади транспортного средства.
[0039] Затем, как проиллюстрировано в частях (f) и (g) по фиг. 4, когда рассматриваемое транспортное средство переезжает в следующую полосу движения, модуль 35 переключения точек обзора переключает позицию виртуальной точки обзора с фиксированного относительно дороги состояния на фиксированное относительно рассматриваемого транспортного средства состояние.
[0040] Следует отметить, что хотя примеры, проиллюстрированные в частях (a) и (b) по фиг. 3 описываются с использованием двухполосной дороги, настоящее изобретение не ограничено этим. Например, в случае если рассматриваемое транспортное средство, движущееся в центральной полосе движения трехполосной дороги, перемещается в правую полосу движения, позиция виртуальной точки обзора может изменяться на место выше правой полосы движения, когда позиция виртуальной точки обзора перемещается за пределы центральной полосы движения в левую полосу движения. Альтернативно, позиция виртуальной точки обзора может изменяться на место выше разделительной полосы между центральной полосой движения и правой полосой движения вместо места выше правой полосы движения.
[0041] Между тем, модуль 35 переключения точек обзора может использовать угол поворота при рулении для того, чтобы определять то, переезжает или нет рассматриваемое транспортное средство в следующую полосу движения. Обычно, при смене полосы движения, угол поворота при рулении изменяется в рисунке одного периода синусоидальной волны в результате поворота руля назад и вперед. Например, в случае выполнения смены полосы движения на правую полосу движения, угол поворота при рулении постепенно увеличивается и достигает положительного пика в результате поворота руля. После достижения положительного пика, угол поворота при рулении уменьшается к позиции нейтрали в результате поворота руля назад. Угол поворота при рулении уменьшается за пределы позиции нейтрали до отрицательного пика и затем увеличивается и в итоге достигает 0 градусов. Следует отметить, что в этом примере, положительный угол поворота при рулении означает то, что руль поворачивается в направлении по часовой стрелке, тогда как отрицательный угол поворота при рулении означает то, что руль поворачивается в направлении против часовой стрелки. Смена полосы движения предположительно может главным образом завершаться, когда угол поворота при рулении переходит из состояния уменьшения в состояние увеличения. Таким образом, модуль 35 переключения точек обзора может определять то, что рассматриваемое транспортное средство переезжает в следующую полосу движения, когда угол поворота при рулении переходит из состояния уменьшения в состояние увеличения. Альтернативно, модуль 35 переключения точек обзора может определять то, что рассматриваемое транспортное средство переезжает в следующую полосу движения, когда угол поворота при рулении в итоге достигает 0 градусов. Еще альтернативно, модуль 35 переключения точек обзора может использовать изображения из камеры 10 переднего вида и т.п., чтобы определять то, переезжает или нет рассматриваемое транспортное средство в следующую полосу движения.
[0042] Далее описывается пример работы устройства 1 помощи при отображении согласно первому варианту осуществления со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 5. Эта блок-схема последовательности операций способа начинается, когда включается переключатель зажигания.
[0043] На этапе S101, контроллер 30 определяет то, включается или нет переключатель 17 указателя поворота. Если переключатель указателя поворота включается ("Да" на этапе S101), процесс переходит к этапу S102. С другой стороны, если переключатель указателя поворота не включается ("Нет" на этапе S101), контроллер 30 ожидает.
[0044] На этапе S102, контроллер 30 получает скорость транспортного средства из датчика 16 скорости транспортного средства.
[0045] На этапе S103, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию виртуальной точки обзора в направлении движения рассматриваемого транспортного средства на основе полученной скорости транспортного средства.
[0046] На этапе S104, контроллер 30 получает окружения движения из изображений из камеры 10 переднего вида и т.п. и навигационного устройства 14. В частности, контроллер 30 определяет то, представляет собой дорога, по которой движется рассматриваемое транспортное средство, прямую дорогу или кривую, то, присутствует либо нет движущееся сзади транспортное средство или движущееся впереди транспортное средство, и т.д. Здесь, в первом варианте осуществления, описание приводится при условии, что дорога, по которой движется рассматриваемое транспортное средство, определяется как прямая дорога. Во втором варианте осуществления описывается случай, в котором дорога, по которой движется рассматриваемое транспортное средство, определяется как кривая.
[0047] На этапе S105, модуль 32 вычисления позиций виртуальных точек обзора получает угол поворота при рулении из датчика угла поворота при рулении.
[0048] На этапе S106, модуль 32 вычисления позиций виртуальных точек обзора вычисляет позицию виртуальной точки обзора в направлении ширины транспортного средства на основе полученного угла поворота при рулении.
[0049] На этапе S107, модуль 35 переключения точек обзора определяет то, находится или нет позиция виртуальной точки обзора, вычисленная на этапе S106, за пределами полосы движения рассматриваемого транспортного средства. Если позиция виртуальной точки обзора находится за пределами полосы движения рассматриваемого транспортного средства ("Да" на этапе S107), процесс переходит к этапу S108. С другой стороны, если позиция виртуальной точки обзора не находится за пределами полосы движения рассматриваемого транспортного средства ("Нет" на этапе S107), процесс возвращается к этапу S105.
[0050] На этапе S108, модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора на место выше целевой полосы движения для смены полосы движения или выше разделительной полосы. Другими словами, модуль 35 переключения точек обзора переключает позицию виртуальной точки обзора с фиксированного относительно рассматриваемого транспортного средства состояния на фиксированное относительно дороги состояние.
[0051] На этапе S109, модуль 35 переключения точек обзора определяет то, переезжает или нет рассматриваемое транспортное средство в следующую полосу движения. Если рассматриваемое транспортное средство переезжает в следующую полосу движения ("Да" на этапе S109), модуль 35 переключения точек обзора переключает позицию виртуальной точки обзора с фиксированного относительно дороги состояния на фиксированное относительно рассматриваемого транспортного средства состояние. С другой стороны, если рассматриваемое транспортное средство не переезжает в следующую полосу движения ("Нет" на этапе S109), процесс ожидает.
[0052] Как описано выше, устройство 1 помощи при отображении согласно первому варианту осуществления позволяет добиваться следующих преимуществ.
[0053] Устройство 1 помощи при отображении определяет то, находится или нет позиция виртуальной точки обзора за пределами полосы движения рассматриваемого транспортного средства, на основе определенного угла поворота при рулении. Устройство 1 помощи при отображении изменяет позицию виртуальной точки обзора при определении того, что позиция виртуальной точки обзора находится за пределами полосы движения рассматриваемого транспортного средства. Посредством управления позицией виртуальной точки обзора на основе руления, как описано выше, водитель может выяснять ситуацию около рассматриваемого транспортного средства.
[0054] Кроме того, при определении того, что позиция виртуальной точки обзора находится за пределами полосы движения рассматриваемого транспортного средства, устройство 1 помощи при отображении изменяет позицию виртуальной точки обзора к следующей полосе движения рядом с полосой движения рассматриваемого транспортного средства. Альтернативно, при определении того, что позиция виртуальной точки обзора находится за пределами полосы движения рассматриваемого транспортного средства, устройство 1 помощи при отображении изменяет позицию виртуальной точки обзора на место выше следующей полосы движения рядом с полосой движения рассматриваемого транспортного средства или выше разделительной полосы между полосой движения рассматриваемого транспортного средства и следующей полосой движения. Таким образом, изображение сверху направленного вниз вида из виртуальной точки обзора может охватывать широкую область позади рассматриваемого транспортного средства. Следовательно, когда движущееся сзади транспортное средство присутствует в целевой полосе движения для смены полосы движения, водитель может быстро осознавать присутствие движущегося сзади транспортного средства на дисплее 50. Это облегчает выполнение въезда в поток или смены полосы движения.
[0055] Следует отметить, что когда позиция виртуальной точки обзора находится в фиксированном относительно рассматриваемого транспортного средства состоянии, позиция виртуальной точки обзора перемещается в сочетании с рулением. Когда руление выполняется при смене полосы движения, вид около рассматриваемого транспортного средства, отображаемый на дисплее 50, значительно колеблется, что может вызывать укачивание в силу зрительной иллюзии. Устройство 1 помощи при отображении согласно первому варианту осуществления изменяет позицию виртуальной точки обзора с полосы движения рассматриваемого транспортного средства на место выше целевой полосы движения для смены полосы движения или выше разделительной полосы между полосой движения рассматриваемого транспортного средства и целевой полосой движения для смены полосы движения при определении того, что позиция виртуальной точки обзора находится за пределами полосы движения рассматриваемого транспортного средства. Посредством переключения позиции виртуальной точки обзора с фиксированного относительно рассматриваемого транспортного средства состояния на фиксированное относительно дороги состояние, как описано выше, устройство 1 помощи при отображении может подавлять колебание вида около рассматриваемого транспортного средства, отображаемого на дисплее 50, и за счет этого уменьшать укачивание в силу зрительной иллюзии.
[0056] Между тем, в первом варианте осуществления, процесс изменения позиции виртуальной точки обзора на основе угла поворота при рулении может начинаться после ввода сигнала из переключателя 17 указателя поворота. Когда водитель включает переключатель 17 указателя поворота вправо, это представляет собой обозначение намерения выполнять смену полосы движения на правую полосу движения. Далее, посредством начала процесса изменения позиции виртуальной точки обзора на основе угла поворота при рулении после ввода сигнала из переключателя 17 указателя поворота, можно предотвращать ситуацию, когда позиция виртуальной точки обзора изменяется посредством непреднамеренной операции на руле водителем.
[0057] Кроме того, устройство 1 помощи при отображении может задавать позицию виртуальной точки обзора в фиксированном относительно дороги состоянии и фиксировать позицию виртуальной точки обзора в полосе движения рассматриваемого транспортного средства. В этом случае, после того, как рассматриваемое транспортное средство выполняет смену полосы движения, устройство 1 помощи при отображении перемещает позицию виртуальной точки обзора с места выше полосы движения перед сменой полосы движения в место выше целевой полосы движения для смены полосы движения. Временной интервал для того, чтобы перемещать позицию виртуальной точки обзора, может задаваться следующим образом. Как проиллюстрировано в части (a) по фиг. 3, в случае если позиция виртуальной точки обзора фиксируется на полосе движения рассматриваемого транспортного средства, позиция виртуальной точки обзора фиксируется в позиции P1' виртуальной точки обзора, когда рассматриваемое транспортное средство движется в левой полосе движения. В этот момент, угол поворота при рулении представляет собой нейтраль. По мере того, как рассматриваемое транспортное средство выполняет смену полосы движения на правую полосу движения, угол поворота при рулении изменяется с рисунком синусоидальной волны, как упомянуто выше, и угол поворота при рулении в итоге возвращается на нейтраль, как проиллюстрировано посредством позиции P7 рассматриваемого транспортного средства в части (a) по фиг. 3. После этого, посредством обнаружения изменения угла поворота при рулении, модуль 35 переключения точек обзора может переключать позицию виртуальной точки обзора, когда истекает предварительно определенное время, поскольку угол поворота при рулении в итоге возвращается на нейтраль. Причина, по которой предварительно определенное время предоставляется, заключается в том, что имеются индивидуальные разности во временном интервале для того, чтобы в итоге возвращать руль на нейтраль при смене полосы движения. Таким образом, когда истекает предварительно определенное время, поскольку угол поворота при рулении в итоге возвращается на нейтраль после того, как смена полосы движения выполняется, позиция виртуальной точки обзора переключается, за счет этого перемещая рассматриваемое транспортное средство на дисплее 50. Это облегчает для водителя проверку рассматриваемого транспортного средства на дисплее 50.
[0058] Второй вариант осуществления
Далее описывается второй вариант осуществления настоящего изобретения со ссылкой на фиг. 6-9. Устройство 1 помощи при отображении согласно второму варианту осуществления является идентичным устройству 1 помощи при отображении в вышеописанном первом варианте осуществления по конфигурации, но отличается от него по окружению движения. Хотя в первом варианте осуществления приведено описание работы на прямой дороге в качестве окружения движения, во втором варианте осуществления приводится описание работы на кривой.
[0059] Во-первых, описывается позиция виртуальной точки обзора, измененная посредством модуля 35 переключения точек обзора, со ссылкой на фиг. 6.
Окружение движения, проиллюстрированное на фиг. 6, представляет собой окружение, в котором рассматриваемое транспортное средство, движущееся в правой полосе движения (внешней полосе движения) кривой на двухполосной дороге, выполняет смену полосы движения на левую полосу движения (внутреннюю полосу движения). Ссылки с номерами P1-P3, проиллюстрированные на фиг. 6, обозначают позиции рассматриваемого транспортного средства. Кроме того, ссылки с номерами P1'-P3', проиллюстрированные на фиг. 6 обозначают позиции виртуальных точек обзора, соответствующие позициям P1-P3 рассматриваемого транспортного средства, соответственно. Кроме того, ссылки с номерами R1-R3, проиллюстрированные на фиг. 6, обозначают поля зрения изображений сверху направленных вниз видов из виртуальных точек обзора. Кроме того, ссылка с номером V2, проиллюстрированная на фиг. 6, обозначает движущееся сзади транспортное средство.
[0060] В случае если рассматриваемое транспортное средство выполняет смену полосы движения на левую полосу движения из позиции P1 рассматриваемого транспортного средства, поле R1 зрения из позиции P1' виртуальной точки обзора не может охватывать движущееся сзади транспортное средство V2, как проиллюстрировано на фиг. 6. По этой причине, модуль 35 переключения точек обзора изменяет позицию P1' виртуальной точки обзора на позицию P1'' виртуальной точки обзора. В частности, модуль 35 переключения точек обзора изменяет позицию P1' виртуальной точки обзора на позицию P1'' виртуальной точки обзора таким образом, что позиция P1'' виртуальной точки обзора может быть расположена на внутренней стороне кривой относительно позиции P1' виртуальной точки обзора, и расстояние между позицией P1' виртуальной точки обзора и позицией P1'' виртуальной точки обзора может составлять ширину в одну полосу движения.
[0061] Обычно, если кривизна кривой является постоянной, руль удерживается под предварительно определенным углом поворота при рулении в ходе движения на кривой. В дальнейшем в этом документе, предварительно определенный угол поворота при рулении для движения по кривой упоминается как фиксированный угол поворота при рулении. В случае если смена полосы движения не выполняется в ходе движения на кривой, величина изменения угла поворота при рулении относительно фиксированного угла поворота при рулении является примерно нулевой. С другой стороны, в случае если рассматриваемое транспортное средство выполняет смену полосы движения на левую полосу движения из позиции P1 рассматриваемого транспортного средства, как проиллюстрировано на фиг. 6, руль дополнительно поворачивается в направлении движения на повороте относительно фиксированного угла поворота при рулении. Другими словами, величина изменения угла поворота при рулении относительно фиксированного угла поворота при рулении увеличивается в направлении движения на повороте. Модуль 35 переключения точек обзора получает величину изменения угла поворота при рулении и сравнивает полученную величину изменения и предварительно установленное пороговое значение. При определении того, что полученная величина изменения превышает пороговое значение, модуль 35 переключения точек обзора перемещает позицию P1' виртуальной точки обзора к внутренней стороне кривой на ширину в одну полосу движения, чтобы изменять ее на позицию P1'' виртуальной точки обзора. Таким образом, поле R1' зрения из позиции P1'' виртуальной точки обзора может охватывать движущееся сзади транспортное средство V2.
[0062] По мере того, как рассматриваемое транспортное средство движется передним ходом из позиции P1 рассматриваемого транспортного средства в позицию P2 рассматриваемого транспортного средства, величина изменения угла поворота при рулении по-прежнему превышает пороговое значение. Таким образом, позиция виртуальной точки обзора остается смещенной и перемещается из позиции P1'' виртуальной точки обзора в позицию P2'' виртуальной точки обзора. Таким образом, поле R2' зрения из позиции P2'' виртуальной точки обзора с большей вероятностью должно охватывать движущееся сзади транспортное средство V2, чем поле R2 зрения из позиции P2' виртуальной точки обзора.
[0063] Когда рассматриваемое транспортное средство движется передним ходом из позиции P2 рассматриваемого транспортного средства в позицию P3 рассматриваемого транспортного средства, и в силу этого рассматриваемое транспортное средство переезжает в следующую полосу движения, модуль 35 переключения точек обзора отменяет смещение. Как результат, виртуальная точка обзора для позиции P3 рассматриваемого транспортного средства находится в позиции P3' виртуальной точки обзора. Следует отметить, что для того, чтобы определять то, переезжает или нет рассматриваемое транспортное средство в следующую полосу движения, может использоваться способ, аналогичный способу, описанному в первом варианте осуществления.
[0064] Между тем, хотя позиция виртуальной точки обзора перемещается на ширину в одну полосу движения в примере, проиллюстрированном на фиг. 6, расстояние перемещения не ограничено этим, но может изменяться надлежащим образом. Градус фиксированного угла поворота при рулении и порогового значения может получаться через тесты и моделирования посредством использования данных по профилям кривизны дороги и т.п.
[0065] Кроме того, хотя позиция виртуальной точки обзора перемещается на основе величины изменения угла поворота при рулении относительно фиксированного угла поворота при рулении в примере, проиллюстрированном на фиг. 6, настоящее изобретение не ограничено этим. Например, как проиллюстрировано на фиг. 7, поле зрения из виртуальной точки обзора в позиции P1' виртуальной точки обзора может поворачиваться к внутренней стороне кривой на основе величины изменения угла поворота при рулении относительно фиксированного угла поворота при рулении. Градус угла поворота может задаваться равным такому градусу, при котором касательная линия L1, идущая из позиции P1' виртуальной точки обзора, является касательной к краевой линии на внутренней стороне кривой. Таким образом, поле R1' зрения из позиции P1' виртуальной точки обзора может охватывать движущееся сзади транспортное средство V2. Аналогично, также в позиции P2' виртуальной точки обзора, градус угла поворота может задаваться равным такому градусу, при котором касательная линия L2, идущая из позиции P2' виртуальной точки обзора, является касательной к краевой линии на внутренней стороне кривой. Таким образом, поле R2' зрения из позиции P2' виртуальной точки обзора с большей вероятностью должно охватывать движущееся сзади транспортное средство V2, чем поле R2 зрения из позиции P2' виртуальной точки обзора.
[0066] Далее описывается другой пример работы во втором варианте осуществления со ссылкой на фиг. 8.
[0067] Окружение движения, проиллюстрированное на фиг. 8, представляет собой окружение, в котором рассматриваемое транспортное средство, движущееся в левой полосе движения (внутренней полосе движения) искривленной двухполосной дороги, выполняет смену полосы движения на правую полосу движения (внешнюю полосу движения). В этом случае, поле R1 зрения из позиции P1' виртуальной точки обзора охватывает движущееся сзади транспортное средство V2 таким образом, что позиция виртуальной точки обзора не должна изменяться. Аналогично, поле R2 зрения из позиции P2' виртуальной точки обзора и поле R3 зрения из позиции P3' виртуальной точки обзора охватывают движущееся сзади транспортное средство V2 таким образом, что позиции виртуальных точек обзора не должны изменяться. Таким образом, модуль 35 переключения точек обзора сохраняет позицию виртуальной точки обзора в фиксированном относительно рассматриваемого транспортного средства состоянии в случае выполнения смены полосы движения на кривой с внутренней полосы движения на внешнюю полосу движения. Между тем, что касается определения того, выполняется или нет смена полосы движения на кривой с внутренней полосы движения на внешнюю полосу движения, модуль 35 переключения точек обзора может определять то, что смена полосы движения выполняется с внутренней полосы движения на внешнюю полосу движения в случае, если величина изменения угла поворота при рулении увеличивается в направлении, противоположном относительно направления движения на повороте.
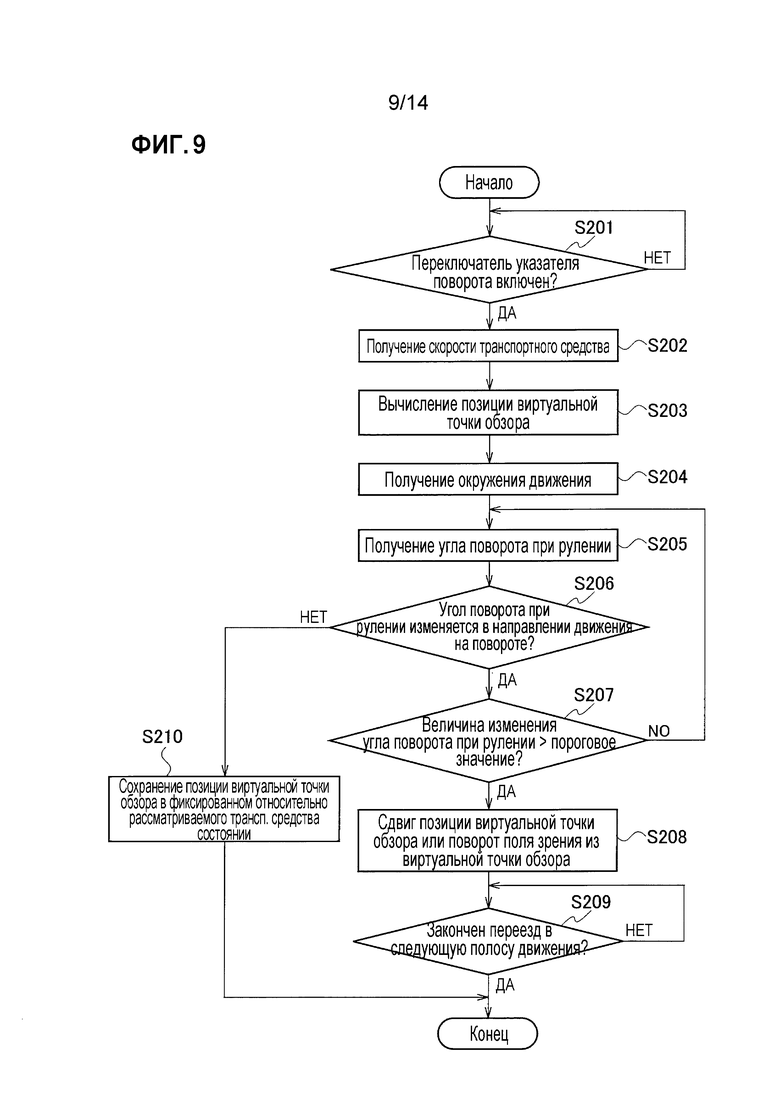
[0068] Далее описывается пример работы устройства 1 помощи при отображении согласно второму варианту осуществления со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 9. Тем не менее, операции этапов S201-S203 и S205 являются идентичными операциям этапов S101-S103 и S105 на фиг. 5, соответственно, и в силу этого их подробное описание опускается.
[0069] На этапе S204, контроллер 30 получает окружения движения из изображений из камеры 10 переднего вида и т.п. и навигационного устройства 14. В частности, контроллер 30 определяет то, представляет собой дорога, по которой движется рассматриваемое транспортное средство, прямую дорогу или кривую, то, присутствует либо нет движущееся сзади транспортное средство или движущееся впереди транспортное средство, и т.д. Здесь, во втором варианте осуществления, описание приводится при условии, что дорога, по которой движется рассматриваемое транспортное средство, определяется как кривая.
[0070] На этапе S206, модуль 35 переключения точек обзора определяет то, изменяется или нет угол поворота при рулении относительно фиксированного угла поворота при рулении в направлении движения на повороте. Если угол поворота при рулении изменяется в направлении движения на повороте ("Да" на этапе S206), процесс переходит к этапу S207. С другой стороны, если угол поворота при рулении изменяется в направлении, противоположном относительно направления движения на повороте ("Нет" на этапе S206), процесс переходит к этапу S210.
[0071] На этапе S207, модуль 35 переключения точек обзора определяет то, превышает или нет величина изменения угла поворота при рулении относительно фиксированного угла поворота при рулении пороговое значение. Если величина изменения угла поворота при рулении превышает пороговое значение ("Да" на этапе S207), процесс переходит к этапу S208. С другой стороны, если величина изменения угла поворота при рулении меньше или равна пороговому значению ("Нет" на этапе S207), процесс возвращается к этапу S205.
[0072] На этапе S208, модуль 35 переключения точек обзора перемещает позицию виртуальной точки обзора к внутренней стороне кривой на ширину в одну полосу движения или поворачивает поле зрения из виртуальной точки обзора к внутренней стороне кривой.
[0073] На этапе S209, модуль 35 переключения точек обзора определяет то, переезжает или нет рассматриваемое транспортное средство в следующую полосу движения. Если рассматриваемое транспортное средство переезжает в следующую полосу движения ("Да" на этапе S209), модуль 35 переключения точек обзора отменяет смещение позиции виртуальной точки обзора. С другой стороны, если рассматриваемое транспортное средство не переезжает в следующую полосу движения ("Нет" на этапе S209), процесс ожидает.
[0074] На этапе S210, модуль 35 переключения точек обзора сохраняет позицию виртуальной точки обзора в фиксированном относительно рассматриваемого транспортного средства состоянии.
[0075] Как описано выше, устройство 1 помощи при отображении согласно второму варианту осуществления позволяет добиваться следующих преимуществ.
[0076] В случае если рассматриваемое транспортное средство, движущееся на кривой, выполняет смену полосы движения с внешней полосы движения кривой на внутреннюю полосу движения кривой, устройство 1 помощи при отображении перемещает позицию виртуальной точки обзора к внутренней стороне кривой на ширину в одну полосу движения или поворачивает поле зрения из виртуальной точки обзора к внутренней стороне кривой. Таким образом, изображение сверху направленного вниз вида из виртуальной точки обзора может охватывать широкую область позади рассматриваемого транспортного средства. Следовательно, когда движущееся сзади транспортное средство присутствует в целевой полосе движения для смены полосы движения, водитель может быстро осознавать присутствие движущегося сзади транспортного средства на дисплее 50. Это облегчает выполнение въезда в поток или смены полосы движения.
[0077] Кроме того, посредством перемещения позиции виртуальной точки обзора к внутренней стороне кривой позиция виртуальной точки обзора приближается к центру дороги. Таким образом, колебание вида около рассматриваемого транспортного средства, отображаемого на дисплее 50, является небольшим по сравнению со случаем, в котором позиция виртуальной точки обзора присутствует на центральной оси рассматриваемого транспортного средства. Другими словами, посредством перемещения позиции виртуальной точки обзора к внутренней стороне кривой, устройство 1 помощи при отображении может подавлять колебание вида около рассматриваемого транспортного средства, отображаемого на дисплее 50, и за счет этого уменьшать укачивание в силу зрительной иллюзии.
[0078] Следует отметить, что также во втором варианте осуществления, аналогично первому варианту осуществления, процесс изменения позиции виртуальной точки обзора на основе угла поворота при рулении может начинаться после ввода сигнала из переключателя 17 указателя поворота. Таким образом, можно предотвращать ситуацию, когда позиция виртуальной точки обзора изменяется посредством непреднамеренной операции на руле водителем.
[0079] Кроме того, позиция виртуальной точки обзора может изменяться с использованием радиуса кривизны кривой, сохраненной в картографической базе данных навигационного устройства 14. Например, в случае если радиус кривизны кривой становится все меньшим к концу кривой, кривая становится все более резкой. В таком случае, водитель дополнительно поворачивает руль в направлении движения на повороте. Можно определять то, что этот поворот состоит в том, чтобы придерживаться кривой, и не предназначен для смены полосы движения. Затем модуль 35 переключения точек обзора может сравнивать радиус кривизны кривой и угол поворота при рулении и изменять позицию виртуальной точки обзора в зависимости от результата сравнения. Например, если радиус кривизны кривой и угол поворота при рулении являются эквивалентными, можно определять то, что водитель движется вперед по дороге, и в силу этого модуль 35 переключения точек обзора сохраняет позицию виртуальной точки обзора в фиксированном относительно рассматриваемого транспортного средства состоянии. С другой стороны, если угол поворота при рулении меньше радиуса кривизны кривой, можно определять то, что водитель выполняет смену полосы движения с внешней полосы движения кривой на внутреннюю полосу движения кривой, и в силу этого модуль 35 переключения точек обзора перемещает позицию виртуальной точки обзора к внутренней стороне кривой на ширину в одну полосу движения или поворачивает поле зрения из виртуальной точки обзора к внутренней стороне кривой. Кроме того, если угол поворота при рулении превышает радиус кривизны кривой, можно определять то, что водитель выполняет смену полосы движения с внутренней полосы движения кривой на внешнюю полосу движения кривой, и в силу этого модуль 35 переключения точек обзора сохраняет позицию виртуальной точки обзора в фиксированном относительно рассматриваемого транспортного средства состоянии. Таким образом, устройство 1 помощи при отображении может отображать ситуацию периферии, на которой водитель должен акцентировать внимание на дисплее 50 в соответствии с рулением водителя.
[0080] Третий вариант осуществления
Далее описывается третий вариант осуществления настоящего изобретения со ссылкой на фиг. 10-13. Третий вариант осуществления отличается от первого варианта осуществления тем, что устройство 2 помощи при отображении включает в себя лазерный дальномер 18, как проиллюстрировано на фиг. 10. Компоненты, идентичные компонентам в первом варианте осуществления, упоминаются посредством соответствующих ссылок с номерами, и их описание опускается. Ниже описывается главным образом отличие.
[0081] Лазерный дальномер 18 (модуль обнаружения окрестностей) представляет собой устройство, которое обнаруживает окружение около рассматриваемого транспортного средства и обнаруживает помехи (к примеру, пешеходов, велосипеды, мотоциклы и другие транспортные средства), присутствующих около (например, в пределах 30 м) рассматриваемого транспортного средства. Более конкретно, лазерный дальномер 18 сканирует лазерный свет в пределах предварительно определенного диапазона углов, принимает отраженный свет и обнаруживает разность времен между временем излучения лазерного света и временем приема отраженного света, чтобы обнаруживать расстояния между рассматриваемым транспортным средством и помехами, углы и т.п. Лазерный дальномер 18 выводит обнаруженную информацию в контроллер 30.
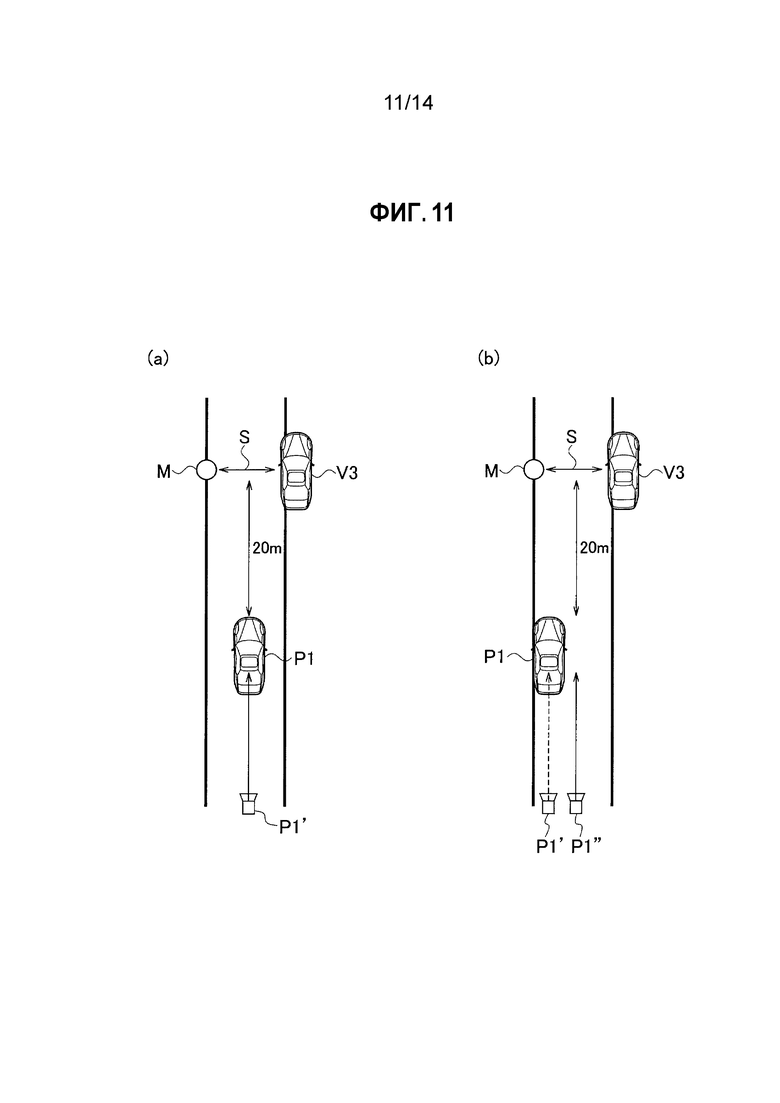
[0082] Далее описывается позиция виртуальной точки обзора, измененная посредством модуля 35 переключения точек обзора, со ссылкой на части (a) и (b) по фиг. 11.
[0083] Ссылка с номером S, проиллюстрированная в части (a) по фиг. 11, обозначает более узкую дорогу. Более узкая дорога S означает дорогу с шириной дороги, меньшей, чем обычно вследствие присутствия помех, таких как столб M линии электропередач и припаркованное транспортное средство V3. Лазерный дальномер 18 обнаруживает более узкую дорогу S.
[0084] Как проиллюстрировано в части (a) по фиг. 11, в случае если более узкая дорога S присутствует в 20 м впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство находится в позиции P1 рассматриваемого транспортного средства, обращен к центру более узкой дороги S непосредственно, центр изображения сверху направленного вниз вида из позиции P1' виртуальной точки обзора и центр более узкой дороги S совпадают друг с другом. Таким образом, более узкая дорога S отображается в центре дисплея 50. Следовательно, водитель может быстро осознавать присутствие более узкой дороги S на дисплее 50.
[0085] С другой стороны, как проиллюстрировано в части (b) по фиг. 11, в случае если более узкая дорога S присутствует в 20 м впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство находится в позиции P1 рассматриваемого транспортного средства, не обращенной к центру более узкой дороги S непосредственно, центр изображения сверху направленного вниз вида из позиции P1' виртуальной точки обзора и центр более узкой дороги S смещаются друг от друга. В этом случае, более узкая дорога S не отображается в центре дисплея 50. Следовательно, водитель не может осознавать присутствие более узкой дороги S.
[0086] По этой причине, в случае если рассматриваемое транспортное средство не обращено к центру более узкой дороги S непосредственно, модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора с позиции P1' виртуальной точки обзора на позицию P1'' виртуальной точки обзора, как проиллюстрировано в части (b) по фиг. 11. В частности, модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора с фиксированного относительно рассматриваемого транспортного средства состояния на фиксированное относительно дороги состояние и изменяет позицию виртуальной точки обзора на позицию, обращенную к центру более узкой дороги S непосредственно. Следовательно, центр изображения сверху направленного вниз вида из позиции P1'' виртуальной точки обзора и центр более узкой дороги S совпадают друг с другом. Таким образом, как проиллюстрировано на фиг. 12, даже когда рассматриваемое транспортное средство V1 не обращено к центру более узкой дороги S непосредственно, более узкая дорога S отображается в центре дисплея 50. Следовательно, водитель может быстро осознавать присутствие более узкой дороги S на дисплее 50.
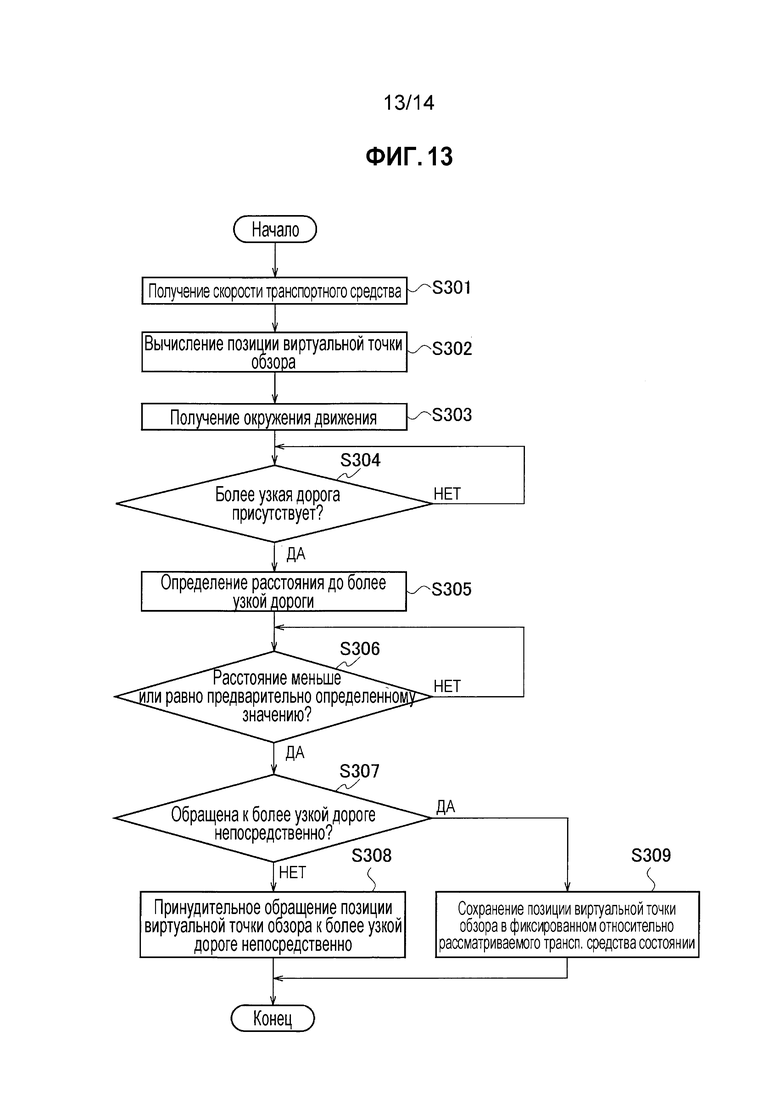
[0087] Далее описывается пример работы устройства 2 помощи при отображении согласно третьему варианту осуществления со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 13. Тем не менее, операции этапов S301-S303 являются идентичными операциям этапов S102-S104 на фиг. 5, соответственно, и в силу этого их подробное описание опускается.
[0088] На этапе S304, контроллер 30 определяет то, присутствует или нет более узкая дорога S впереди рассматриваемого транспортного средства, на основе выходного сигнала лазерного дальномера 18. Если более узкая дорога S присутствует ("Да" на этапе S304), процесс переходит к этапу S305. С другой стороны, если более узкая дорога S не присутствует ("Нет" на этапе S304), процесс ожидает.
[0089] На этапе S305, контроллер 30 определяет расстояние до более узкой дороги S на основе выходного сигнала лазерного дальномера 18.
[0090] На этапе S306, контроллер 30 определяет то, составляет или нет расстояние до более узкой дороги S предварительно определенное значение или меньше. Предварительно определенное значение составляет, например, 20 м. Если расстояние до более узкой дороги S составляет предварительно определенное значение или меньше ("Да" на этапе S306), процесс переходит к этапу S307. С другой стороны, если расстояние до более узкой дороги S превышает предварительно определенное значение ("Нет" на этапе S306), процесс ожидает. Между тем, причина определять то, составляет или нет расстояние до более узкой дороги S предварительно определенное значение или меньше, состоит в том, что по-прежнему рано уведомлять водителя в отношении присутствия более узкой дороги S, если более узкая дорога S присутствует на расстоянии, большем предварительно определенного значения.
[0091] На этапе S307, контроллер 30 определяет то, обращена или нет позиция виртуальной точки обзора к центру более узкой дороги S непосредственно. Если позиция виртуальной точки обзора не обращена к центру более узкой дороги S непосредственно ("Нет" на этапе S307), процесс переходит к этапу S308. С другой стороны, если позиция виртуальной точки обзора обращена к центру более узкой дороги S непосредственно ("Да" на этапе S307), процесс переходит к этапу S309.
[0092] На этапе S308, модуль 35 переключения точек обзора изменяет позицию виртуальной точки обзора таким образом, что позиция виртуальной точки обзора обращена к центру более узкой дороги S непосредственно.
[0093] На этапе S309, модуль 35 переключения точек обзора сохраняет позицию виртуальной точки обзора в фиксированном относительно рассматриваемого транспортного средства состоянии.
[0094] Как описано выше, устройство 2 помощи при отображении согласно третьему варианту осуществления позволяет добиваться следующих преимуществ.
[0095] При обнаружении более узкой дороги S устройство 2 помощи при отображении определяет то, обращена или нет позиция виртуальной точки обзора к центру более узкой дороги S непосредственно. Затем если позиция виртуальной точки обзора не обращена к центру более узкой дороги S непосредственно, устройство 2 помощи при отображении изменяет позицию виртуальной точки обзора таким образом, что позиция виртуальной точки обзора обращена к центру более узкой дороги S непосредственно. С другой стороны, если позиция виртуальной точки обзора обращена к центру более узкой дороги S непосредственно, устройство 2 помощи при отображении сохраняет позицию виртуальной точки обзора в фиксированном относительно рассматриваемого транспортного средства состоянии. Таким образом, более узкая дорога S отображается в центре дисплея 50. Следовательно, водитель может быстро осознавать присутствие более узкой дороги S на дисплее 50.
[0096] Следует отметить, что хотя позиция виртуальной точки обзора изменяется на основе угла поворота при рулении в первом варианте осуществления и втором варианте осуществления, позиция виртуальной точки обзора также может изменяться с использованием угла поворота при рулении в третьем варианте осуществления. Например, когда более узкая дорога S присутствует впереди рассматриваемого транспортного средства, возможно то, что водитель выполняет смену полосы движения, чтобы объезжать более узкую дорогу S, либо едва заметно регулирует руль таким образом, чтобы проезжать через более узкую дорогу S. Затем устройство 2 помощи при отображении может задавать мертвый диапазон, в пределах которого изменения угла поворота при рулении игнорируются, и определять то, находится или нет угол поворота при рулении в пределах мертвого диапазона. Если угол поворота при рулении находится в пределах мертвого диапазона, можно допускать то, что водитель едва заметно регулирует руль таким образом, чтобы проезжать через более узкую дорогу S. В силу этого устройство 2 помощи при отображении инструктирует позиции виртуальной точки обзора быть обращенной к центру более узкой дороги S непосредственно. С другой стороны, если угол поворота при рулении находится за пределами мертвого диапазона, можно допускать то, что водитель выполняет смену полосы движения, чтобы объезжать более узкую дорогу S, и в силу этого устройство 2 помощи при отображении изменяет позицию виртуальной точки обзора с полосы движения рассматриваемого транспортного средства на место выше целевой полосы движения для смены полосы движения или выше разделительной полосы между полосой движения рассматриваемого транспортного средства и целевой полосой движения для смены полосы движения. Таким образом, устройство 2 помощи при отображении может отображать ситуацию периферии, на которой водитель должен акцентировать внимание на дисплее 50 в соответствии с рулением водителя. Следует отметить, что мертвый диапазон может получаться через тесты и моделирования.
[0097] Хотя выше описаны варианты осуществления настоящего изобретения, не следует понимать, что подробное описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают это изобретение. Различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
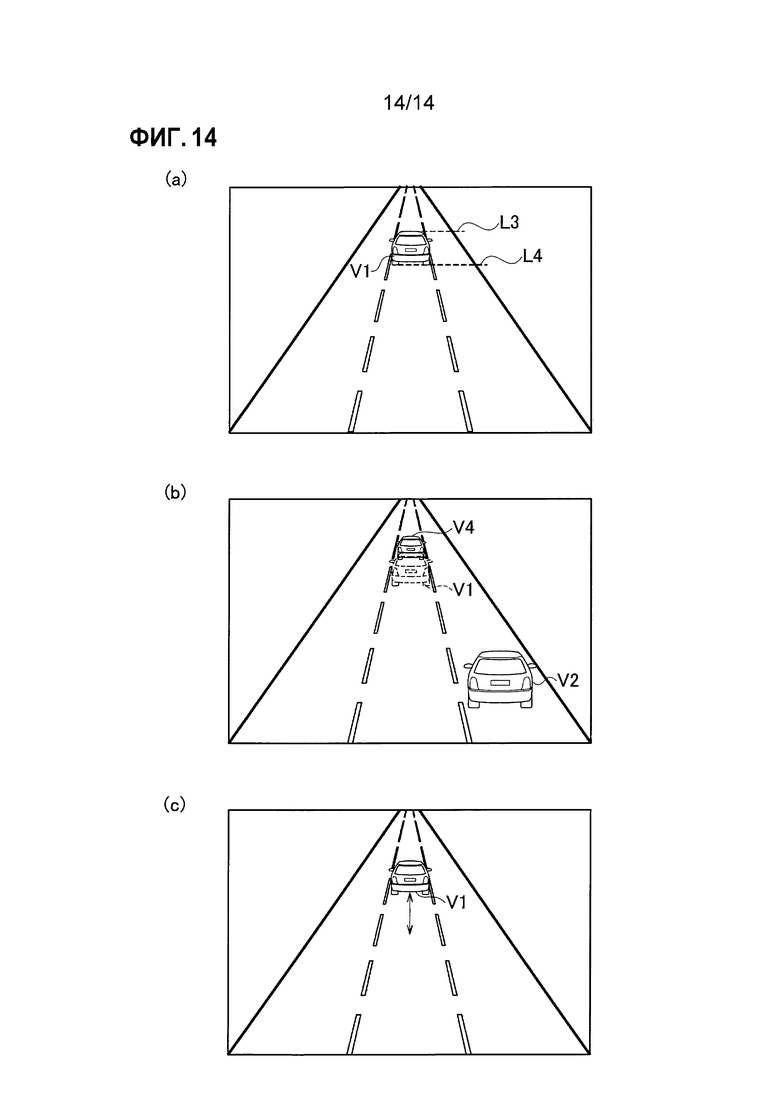
[0098] Например, как проиллюстрировано в части (a) по фиг. 14, в случае если рассматриваемое транспортное средство пытается выполнять смену полосы движения с центральной полосы движения на правую полосу движения, верхняя концевая линия L3, указывающая верхний конец рассматриваемого транспортного средства V1 (значок рассматриваемого транспортного средства), отображаемый на дисплее 50, и нижняя концевая линия L4, указывающая нижний конец рассматриваемого транспортного средства V1, может идти из полосы движения рассматриваемого транспортного средства и накладываться на целевую полосу движения для смены полосы движения или правую полосу движения. Таким образом, водитель может легко выяснять позицию рассматриваемого транспортного средства на дисплее 50. Кроме того, если движущееся сзади транспортное средство присутствует в правой полосе движения, водитель может легко выяснять расстояние между транспортными средствами до движущегося сзади транспортного средства. Следует отметить, что модуль 36 комбинирования может накладывать верхнюю концевую линию L3 и нижнюю концевую линию L4 только на целевую полосу движения для смены полосы движения или правую полосу движения.
[0099] Кроме того, как проиллюстрировано в части (b) по фиг. 14, рассматриваемое транспортное средство V1 может отображаться на дисплее 50 в качестве прозрачного значка, допускающего просмотр насквозь. Таким образом, водитель может легко отличать рассматриваемое транспортное средство V1 от движущегося впереди транспортного средства V4 и движущегося сзади транспортного средства V2 и легко выяснять ситуацию около рассматриваемого транспортного средства V1.
[0100] Кроме того, как проиллюстрировано в части (c) по фиг. 14, редактирование может выполняться, чтобы отображать рассматриваемое транспортное средство V1 выше центра дисплея 50. Таким образом, водитель может легко проверять присутствие движущегося сзади транспортного средства.
[0101] Хотя позиция виртуальной точки обзора изменяется на основе угла поворота при рулении в настоящем изобретении, настоящее изобретение не ограничено этим. Например, позиция виртуальной точки обзора может изменяться на основе скорости относительно вертикальной оси, определенной с использованием датчика скорости относительно вертикальной оси.
[0102] Кроме того, настоящее изобретение является применимым к автономным транспортным средствам.
[0103] Содержимое заявки на патент (Япония) № 2015-199918 (дата подачи: 8 октября 2015 года) полностью содержится в данном документе.
Список номеров ссылок
[0104] 10 - камера переднего вида
11 - правая камера
12 - левая камера
13 - камера заднего вида
14 - навигационное устройство
15 - датчик угла поворота при рулении
16 - датчик скорости транспортного средства
17 - переключатель указателя поворота
18 - лазерный дальномер
30 - контроллер
31 - детектор полосы движения
32 - модуль вычисления позиций виртуальных точек обзора
33 - преобразователь точки обзора
34 - устройство хранения данных
35 - модуль переключения точек обзора
36 - модуль комбинирования
50 - дисплей
Изобретение относится к системе обеспечения дополнительного обзора водителю транспортного средства, построенную на основе видеокамер. Техническим результатом является устранение слепых зон для водителя транспортного средства. Результат достигается тем, что устройство (1) помощи при отображении определяет угол поворота при рулении транспортного средства посредством использования датчика (15) угла поворота при рулении и изменяет позицию виртуальной точки обзора позади рассматриваемого транспортного средства на основе упомянутого определенного угла поворота при рулении. Затем устройство (1) помощи при отображении преобразует изображения, захваченные с использованием множества камер, к примеру, камеры (10) переднего вида и камеры (13) заднего вида, в изображение сверху направленного вниз вида из виртуальной точки обзора и отображает преобразованное изображение сверху на дисплее (50) со значком рассматриваемого транспортного средства, накладываемым на изображение сверху, причем значок рассматриваемого транспортного средства указывает позицию транспортного средства. 4 н. и 6 з.п. ф-лы, 14 ил.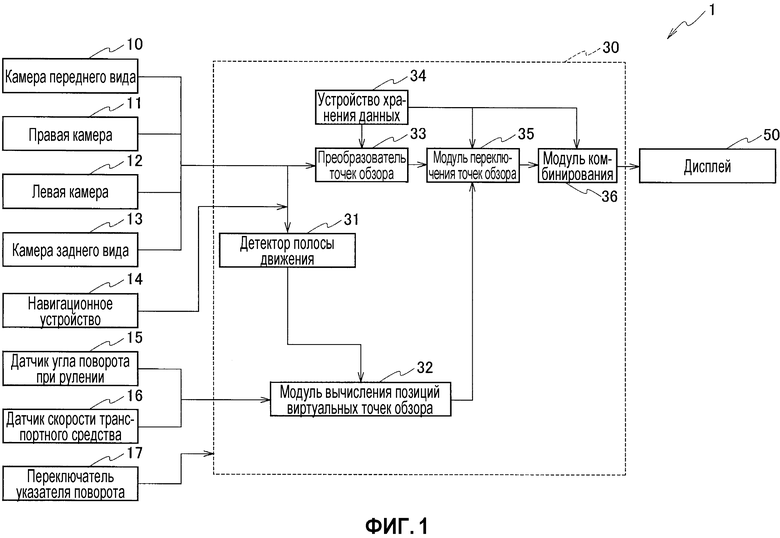
1. Устройство помощи при отображении, которое преобразует изображения, захваченные посредством множества модулей формирования изображений, установленных на транспортном средстве, в изображение сверху направленного вниз вида из виртуальной точки обзора в воздухе, и отображает изображение сверху на модуле отображения со значком рассматриваемого транспортного средства, накладываемым на изображение сверху, причем значок рассматриваемого транспортного средства указывает позицию транспортного средства, при этом устройство помощи при отображении содержит:
- модуль изменения, который определяет то, выполняет или нет транспортное средство смену полосы движения с полосы движения, в которой движется транспортное средство, на следующую полосу движения рядом с упомянутой полосой движения, и изменяет позицию виртуальной точки обзора при определении того, что транспортное средство выполняет смену полосы движения,
при этом в случае, если транспортное средство движется на кривой и выполняет смену полосы движения с внешней полосы движения кривой на внутреннюю полосу движения кривой, модуль изменения перемещает позицию виртуальной точки обзора к внутренней стороне кривой или поворачивает поле зрения из виртуальной точки обзора к внутренней стороне кривой, и
в случае, если транспортное средство движется на кривой и выполняет смену полосы движения с внутренней полосы движения кривой на внешнюю полосу движения кривой, модуль изменения перемещает позицию виртуальной точки обзора к внутренней стороне кривой или поворачивает поле зрения из виртуальной точки обзора к внешней стороне кривой.
2. Устройство помощи при отображении, которое преобразует изображения, захваченные посредством множества модулей формирования изображений, установленных на транспортном средстве, в изображение сверху направленного вниз вида из виртуальной точки обзора в воздухе, и отображает изображение сверху на модуле отображения со значком рассматриваемого транспортного средства, накладываемым на изображение сверху, причем значок рассматриваемого транспортного средства указывает позицию транспортного средства, при этом устройство помощи при отображении содержит:
- модуль изменения, который определяет то, выполняет или нет транспортное средство смену полосы движения с полосы движения, в которой движется транспортное средство, на следующую полосу движения рядом с упомянутой полосой движения, и изменяет позицию виртуальной точки обзора при определении того, что транспортное средство выполняет смену полосы движения; и
- модуль обнаружения окрестностей, который обнаруживает окружение около транспортного средства,
при этом в случае, если модуль обнаружения окрестностей обнаруживает более узкую дорогу впереди транспортного средства, модуль изменения изменяет позицию виртуальной точки обзора таким образом, что виртуальная точка обзора обращена к центру более узкой дороги непосредственно.
3. Устройство помощи при отображении, которое преобразует изображения, захваченные посредством множества модулей формирования изображений, установленных на транспортном средстве, в изображение сверху направленного вниз вида из виртуальной точки обзора в воздухе, и отображает изображение сверху на модуле отображения со значком рассматриваемого транспортного средства, накладываемым на изображение сверху, причем значок рассматриваемого транспортного средства указывает позицию транспортного средства, при этом устройство помощи при отображении содержит:
- модуль изменения, который определяет то, выполняет или нет транспортное средство смену полосы движения с полосы движения, в которой движется транспортное средство, на следующую полосу движения рядом с упомянутой полосой движения, и изменяет позицию виртуальной точки обзора при определении того, что транспортное средство выполняет смену полосы движения,
при этом модуль изменения изменяет позицию виртуальной точки обзора в случае, если позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства.
4. Устройство помощи при отображении по п. 3, в котором в случае, если транспортное средство выполняет смену полосы движения с полосы движения, в которой движется транспортное средство, на следующую полосу движения рядом с упомянутой полосой движения, модуль изменения изменяет позицию виртуальной точки обзора к следующей полосе движения.
5. Устройство помощи при отображении по п. 3 или 4, в котором в случае, если транспортное средство выполняет смену полосы движения с полосы движения, в которой движется транспортное средство, на следующую полосу движения рядом с упомянутой полосой движения, модуль изменения изменяет позицию виртуальной точки обзора на место выше следующей полосы движения или выше граничной линии между упомянутой полосой движения и следующей полосой движения.
6. Устройство помощи при отображении по п. 4, дополнительно содержащее:
- модуль редактирования, который редактирует изображение сверху,
при этом модуль редактирования накладывает верхнюю концевую линию, указывающую верхний конец значка рассматриваемого транспортного средства, и нижнюю концевую линию, указывающую нижний конец значка рассматриваемого транспортного средства, на следующую полосу движения.
7. Устройство помощи при отображении по п. 6, в котором модуль редактирования накладывает значок рассматриваемого транспортного средства в качестве прозрачного значка, допускающего просмотр насквозь.
8. Устройство помощи при отображении по п. 6 или 7, в котором модуль редактирования накладывает значок рассматриваемого транспортного средства на изображение сверху выше его центра.
9. Устройство помощи при отображении по п. 3, в котором, когда истекает предварительно определенное время после того, как транспортное средство выполняет смену полосы движения, модуль изменения изменяет позицию виртуальной точки обзора на полосу движения, на которую выполнена смена полосы движения.
10. Способ помощи при отображении, включающий в себя преобразование изображений, захваченных посредством множества модулей формирования изображений, установленных на транспортном средстве, в изображение сверху направленного вниз вида из виртуальной точки обзора в воздухе, и отображение изображения сверху на модуле отображения со значком рассматриваемого транспортного средства, накладываемым на изображение сверху, причем значок рассматриваемого транспортного средства указывает позицию транспортного средства, при этом способ помощи при отображении содержит:
- первый этап, на котором определяют то, выполняет или нет транспортное средство смену полосы движения с полосы движения, в которой движется транспортное средство, на следующую полосу движения рядом с упомянутой полосой движения; и
- второй этап, на котором изменяют позицию виртуальной точки обзора при определении того, что транспортное средство выполняет смену полосы движения,
при этом на втором этапе позиция виртуальной точки обзора изменяется в случае, если позиция виртуальной точки обзора перемещается за пределы полосы движения рассматриваемого транспортного средства.
| Способ получения пряжи из необлагороженных лубяных во локон | 1941 |
|
SU64175A1 |
| US 8018488 B2, 2011.09.13 | |||
| US 2013293683 A1, 2013.11.07 | |||
| DE 112013005231 T5, 2015.08.06 | |||
| JP 2012253428 A, 2012.12.20 | |||
| JP 2012195793 A, 2012.10.11 | |||
| СИСТЕМА, АССИСТИРУЮЩАЯ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО С УКАЗАННОЙ СИСТЕМОЙ И СПОСОБ ОКАЗАНИЯ ПОДДЕРЖКИ ВОДИТЕЛЮ ПРИ УПРАВЛЕНИИ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2555248C2 |
| Способ кодирования сообщений статистическим кодом | 1959 |
|
SU147024A1 |

