ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к системам позиционирования. Более конкретно, настоящее раскрытие относится к системам, используемым для идентификации местоположения или отслеживания объектов в данной области.
[0002] Система позиционирования (PS) представляет собой сеть устройств, используемых для беспроводного определения местонахождения объектов или людей внутри здания или в плотных промышленных районах. Требуется специальная структура, так как системы глобальной системы позиционирования (GPS), как правило, не пригодны для установления местоположений в помещении или других местах скопления людей, поскольку они требуют беспрепятственной линии визирования к четырем или более спутникам GPS. Микроволны будут ослабляться и рассеиваться крышами, стенами и другими объектами, и многократные отражения на поверхностях вызывают многолучевое распространение, приводящее к неконтролируемым ошибкам.
[0003] Время пролета (TоF) представляет собой величину времени, которое требуется сигналу для прохождения от передатчика к приемнику. Поскольку скорость распространения сигнала постоянна и известна, то время прохождения сигнала может быть использовано непосредственно для вычисления расстояния. Несколько измерений (в GPS, по меньшей мере для четырех спутников) по отношению к нескольким станциям привязки могут комбинироваться с помощью трилатерации, чтобы найти местоположение.
[0004] Так как скорость света равна 3×108 м/сек, в системах, основанных на радиочастоте (RF), неточность тактовой синхронизации является ключевым фактором ошибки позиционирования. В GPS, ToF обычно требует сложного механизма синхронизации, чтобы поддерживать надежный источник времени для датчиков.
[0005] Кроме того, точные способы на основе ToF часто испытывают негативное влияние условий интенсивного многолучевого распространения в ситуациях локализации с плотной заполненностью, таких как внутренние помещения и промышленные среды, которые могут быть переполнены, что обусловлено отражением и дифракцией RF сигнала от объектов.
[0006] Из-за ослабления и отражений, вызванных материалами конструкций, желательно иметь беспрепятственную линию визирования по меньшей мере до трех точек привязки в любом местоположении, покрытие которого должно обеспечиваться системой. В результате, требуется большее количество станций привязки.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0007] Система позиционирования в соответствии с одним вариантом осуществления включает в себя множество станций привязки, каждая из которых выполнена с возможностью передачи и приема радиочастотного сигнала. Мобильная станция включает в себя радиочастотный приемопередатчик, выполненный с возможностью передачи и приема радиочастотного сигнала по меньшей мере от одной из множества станций привязки. Блок обработки выполнен с возможностью определения информации местоположения мобильного блока на основе переданного и принятого радиочастотного сигнала.
[0008] Система позиционирования в соответствии с другим вариантом осуществления включает в себя множество маяков, каждый из которых по меньшей мере частично получает питание от аккумуляторной батареи и выполнен с возможностью беспроводной связи. Сервер приложений выполнен с возможностью беспроводной связи с маяками на основании стандарта связи.
[0009] Вариант осуществления способа определения местоположения мобильного маркера в системе, содержащей сервер приложений и множество маяков фиксированного местоположения, включает в себя соединение множества маяков и сервера приложений с сетью беспроводной связи. Множество временных интервалов назначается в сервере приложений для двунаправленных операций определения дальности между маяком из множества маяков и мобильным маркером. Дальность мобильного маркера определяется по отношению к по меньшей мере трем маякам из множества маяков. Информация мобильного маркера переносится от множества маяков в сервер приложений.
[0010] Настоящие краткое описание сущности изобретения и реферат обеспечены для представления выбора концепций в упрощенном виде, которые дополнительно описаны ниже в подробном описании. Краткое описание сущности изобретения и реферат не предназначены ни для определения ключевых признаков или существенных признаков заявленного предмета, ни для использования в качестве помощи при определении объема заявленного предмета.
Краткое описание чертежей
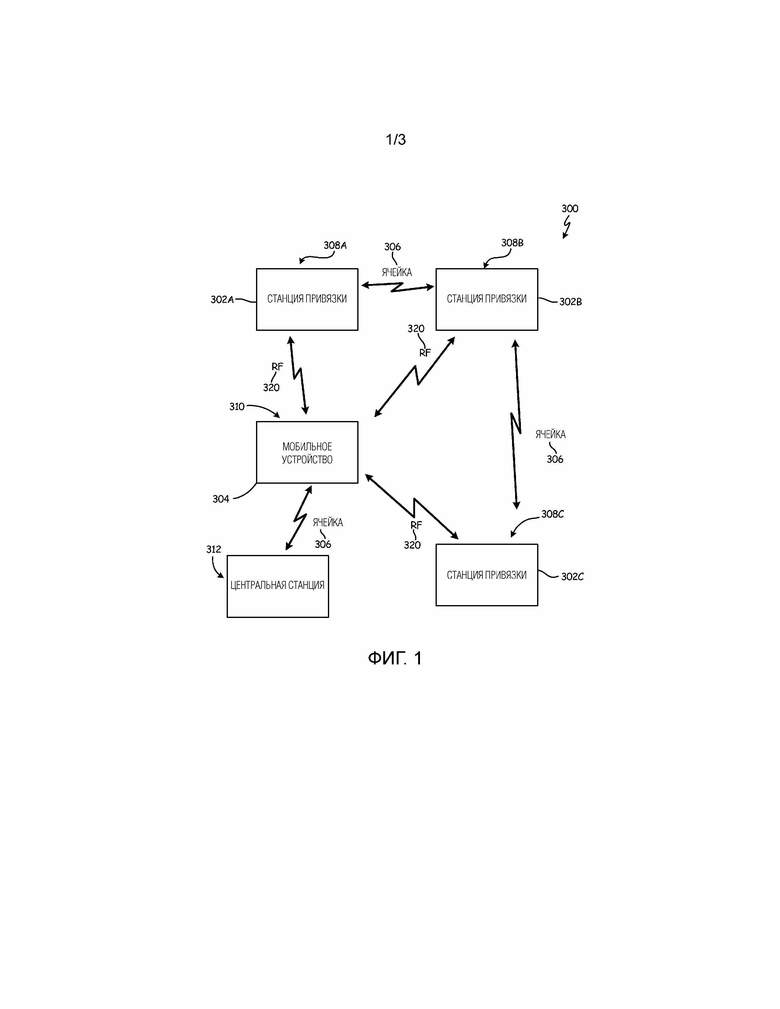
[0011] Фиг. 1 показывает блок-схему системы позиционирования в соответствии с одним вариантом осуществления настоящего изобретения.
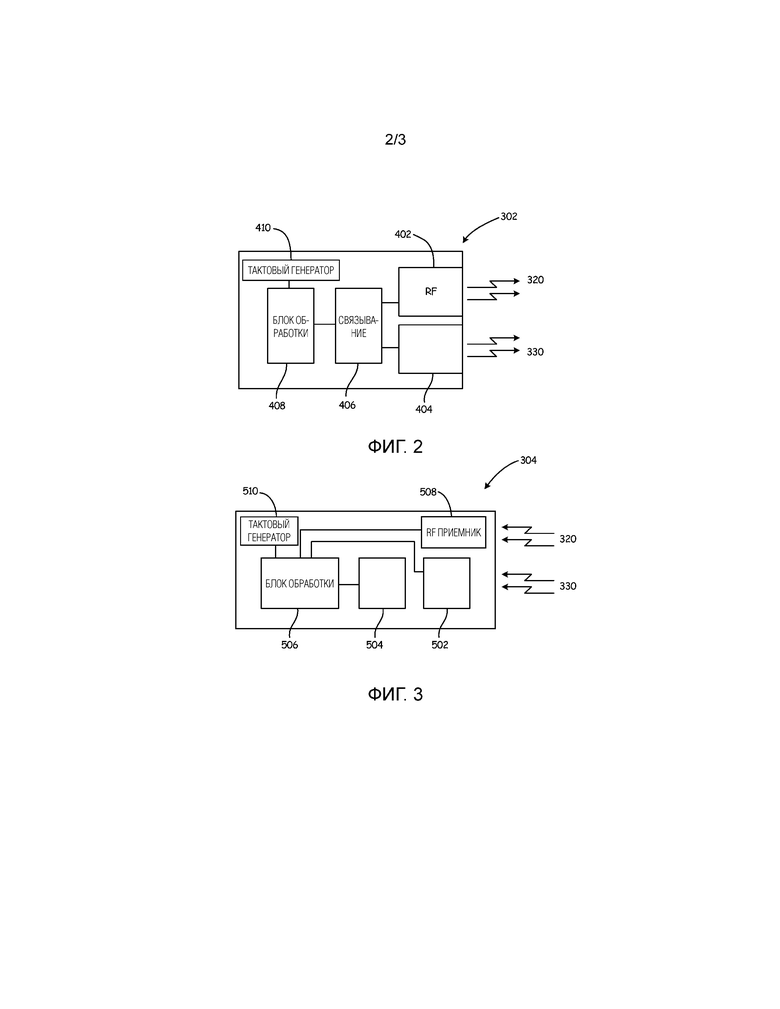
[0012] Фиг. 2 является блок-схемой станции привязки в соответствии с одним вариантом осуществления настоящего изобретения.
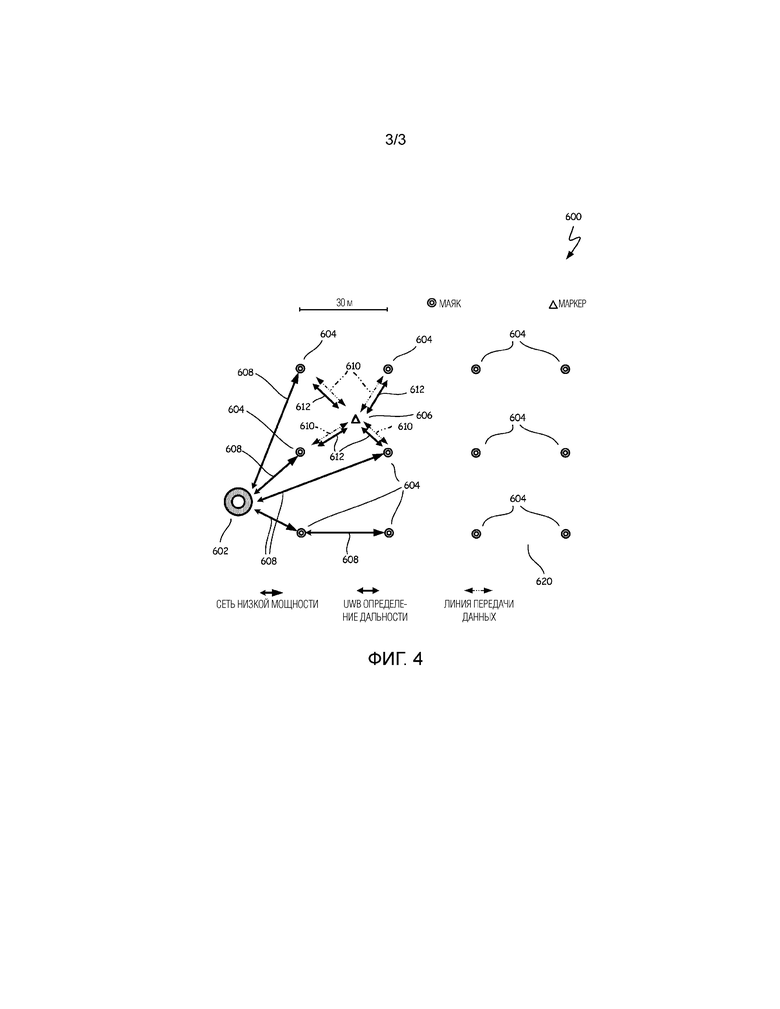
[0013] Фиг. 3 является блок-схемой мобильной станции в соответствии с одним вариантом осуществления настоящего изобретения.
[0014] Фиг. 4 является блок-схемой, показывающей центральное местоположение, станции привязки и мобильную станцию.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0015] В одной конкретной конфигурации, система основана на коммерчески проверенной промышленной ячеистой сети, такой как сеть WirelessHART® (IEC 62591), и показана в виде блок-схемы на фиг. 1.
[0016] Фиг. 1 показывает систему 300, имеющую множество станций 302 привязки (или ʺмаяковʺ) (три станции привязки 302A, 302B и 302C показаны на фиг. 3 и описаны более подробно ниже), которые расположены в известных местоположениях, и мобильную станцию (также называемую ʺмаркерʺ, ʺпортативный блокʺ или PUʺ) 304 (описана более подробно ниже), для которой желательно определить местоположение 310. Станции 302 привязки являются в одном варианте осуществления частью беспроводной ячеистой сети 306, такой как сеть WirelessHART®. При работе, множество станций 302 привязки позиционированы в известных местоположениях 308A, 308B и 308C вокруг области, подлежащей контролю. Мобильная станция 304 расположена на или вблизи объекта, для которого желательно знать местоположение 310. Объект может быть, только в качестве примера, но не ограничения, частью инвентаря или человеком.
[0017] В одном варианте осуществления, как показано на фиг. 1, чтобы определить расстояние от станции 302 привязки до мобильной станции 304, станция 302 привязки передает RF сообщение 320 (т.е., сообщение WirelessHART®). Как описано ниже, сигналы WirelessHART® обеспечивают возможность синхронизации, так как они могут содержать информацию синхронизации, а также обеспечивают возможность передачи данных, как известно в данной области техники. Использование этой возможности синхронизации и передачи данных создает возможность для использования RF импульса в качестве уникального импульса синхронизации, так что становится возможным узнать, какая станция 302 привязки или мобильная станция 304 выполняет передачу, в дополнение к тому, когда производится передача. Разница во времени между передачей RF импульса и приемом ответа создает возможность определения расстояния между мобильной станцией и передающей станцией 302 привязки. Местоположение для мобильной станции может быть определено с использованием вычислений расстояния от трех отдельных станций привязки, например, с использованием трилатерации.
[0018] TDMA является известным стандартом для совместного использования частотного канала в сети, при помощи разделения сигнала на множество временных интервалов. Все станции, такие как станции 302 привязки, описанные в данной заявке, могут совместно использовать частоту, используемую для импульсов, путем назначения конкретного временного интервала для передач. В одном варианте осуществления, центральная станция 312, приняв информацию от одной или нескольких мобильных станций 304 относительно ее/их местоположения(й), использует определенные местоположения, чтобы регулировать сегментирование времени в пределах TDMA. Центральная станция 312 используется в системе 300 и соединена с ячейкой 306 для приема информации от одной или нескольких мобильных станций 304. Временные интервалы для станций 302 привязки назначаются центральной станцией 312. Может использоваться любой подходящий метод связи, включая методы CDMA или другие методы сегментирования или совместного использования времени и/или частоты. Альтернативно или дополнительно, станции 302 привязки могут осуществлять связь непосредственно с центральной станцией 312.
[0019] В одном варианте осуществления, информация местоположения для одной или нескольких мобильных станций 304 используется, чтобы регулировать временные интервалы для различных станций привязки. Например, когда местоположение 310 мобильной станции ближе к некоторым станциям 302 привязки, чем к другим, временные интервалы для тех станций 302 привязки на большем расстоянии могут быть расширены, создавая возможность для распространения импульса и приема без перекрытия от других станций 302 привязки из-за расстояния. Центральная станция 312 в одном варианте осуществления контролирует расстояния от каждой станции 302 привязки линии визирования до каждой мобильной станции 304 и подстраивает временные интервалы для станций привязки в соответствии с ожидаемым временем распространения для уменьшения перекрестных помех между станциями 302 привязки. Кроме того, кодирование импульса и различные частоты, включая методы расширенного спектра, также могут использоваться для уменьшения перекрестных помех между близкими станциями 302 привязки или другими станциями привязки.
[0020] Станции 302 системы привязки все являются устройствами, зарегистрированными в сети 300, так что каждая точка 302 привязки является устройством WirelessHART® с RF передатчиком 402. Дополнительно, станция 302 привязки содержит опциональный модуль 404 связи, который может осуществлять связь с использованием сигналов 330 связи и некоторой связующей логики 406.
[0021] Подробности станции 302 привязки показаны на фиг. 2. Каждая станция 302 привязки включает в себя в одном варианте осуществления RF передатчик (т.е., WirelessHART®) 402, модуль 404 связи, связующую логику 406 для обеспечения возможности сопряжения между различными более сложными логическими схемами, такими как RF передатчик 402 и модуль 404 связи, блок 408 обработки или тому подобное в пределах станции 302 привязки и часы (тактовый генератор) 410. Связующая логика 406 известна в данной области техники и не будет описана здесь дополнительно. Кроме того, WirelessHART® является известным стандартом для беспроводной сенсорной сети на основании протокола адресуемого дистанционного магистрального преобразователя (HART®). В одном варианте осуществления, станции 302 привязки являются частью ячеистой сети устройств, например, каждая станция 302 привязки является устройством WirelessHART® в беспроводной ячеистой сети 306. Тактовый генератор 410 операционно связан в одном варианте осуществления к блоку 406 обработки, чтобы позволять блоку 406 обработки определять время передачи сигналов, таких как RF сигнал 320. В другом варианте осуществления, тактовый генератор 410 может быть частью блока 406 обработки.
[0022] Как проиллюстрировано на фиг. 3, в одной конфигурации, мобильная станция 304 также является устройством WirelessHART® с опциональным модулем 502 связи, опциональным блоком 504 GPS, малым блоком 506 обработки и RF приемником 508.
[0023] Мобильная станция 304 включает в себя в одном варианте осуществления опциональный модуль 502 связи, опциональный блок 504 GPS для использования в наружных местоположениях, блок 506 обработки, RF приемник 508 и тактовый генератор 510. RF приемник 508 операционно связан с блоком 506 обработки. Тактовый генератор 510 операционно связан в одном варианте осуществления с блоком 506 обработки, чтобы позволять блоку 506 обработки определять время приема сигналов, таких как RF сигнал 320. В другом варианте осуществления, тактовый генератор 510 может быть частью блока 506 обработки.
[0024] Чтобы вычислять свое позиционирование, мобильная станция 304 измеряет расстояние по меньшей мере до трех станций 302 привязки. Три станции 302 привязки обеспечивают возможность адекватного определения местоположения, например, при помощи трилатерации, для мобильной станция 304, которая находится на линии визирования каждой из станций 302 привязки, но в случае, если существует большее количество точек 302 привязки в данной области, то избыточность может быть использована для повышения надежности измерений. Хотя три станции 302 привязки (соответственно, 302A, 302B и 302C) показаны на фиг. 3, следует понимать, что для полного покрытия области, дополнительные станции привязки могут использоваться для повышения точности определения местоположения 310 и для обеспечения большего количества потенциальных опций линии визирования для всех частей области, покрытие которой должно обеспечиваться системой 300. Кроме того, хотя показана одна мобильная станция 304, множество мобильных станций 304 может быть расположено в пределах области, подлежащей контролю, и система 300 может использовать то же самое множество станций 302 привязки, передающих RF сигналы, для определения множества местоположений 310 множества мобильных станций 304. Мобильная станция 304 сообщает полученную информацию центральной станции 312 посредством сети 306. Центральная станция 312 может исполнять алгоритм, который оптимизирует временные интервалы TDMA в соответствии с текущими местоположениями 310 мобильных станций 304 и может модифицировать параметры сети соответственно. В пределах ячеистой сети, так как местоположения станций 302 привязки могут передаваться через сеть, станции 302 привязки, мобильные станции 304 или центральная станция 312 могут, в различных вариантах осуществления, производить определение местоположения мобильной станции 304.
[0025] В некоторых ситуациях, местоположение мобильной станции может быть определено с использованием меньше, чем трех станций привязки. Такая ситуация включает в себя в качестве примера, но без ограничения, ту, где существует некоторая известная внешняя информация о мобильной станции, например, то, что она расположена в коридоре или другой известной ограниченной области, или где другая информация отслеживания известна для мобильной станции. В таких ситуациях, местоположение может быть определено с использованием всего лишь одной станции привязки.
[0026] Система позиционирования (PS) обеспечена в одном варианте осуществления, в котором сеть устройств используется для беспроводного определения местонахождения объектов или людей внутри здания или в плотных промышленных районах. Обеспечен вариант осуществления системы, который не обязательно полагается на GPS для определения местоположения. Кроме того, микроволны будут ослабляться и рассеиваться крышами, стенами и другими объектами, особенно в среде внутри помещения. Кроме того, множество отражений на поверхностях могут вызывать многолучевое распространение, приводящее к неконтролируемым ошибкам.
[0027] Вариант осуществления 600 PS с использованием сверхширокополосной связи между маяками и маркерами системы показан на блок-схеме на фиг. 4. PS 600 содержит в одном варианте осуществления сервер 602 приложений, множество маяков 604 и по меньшей мере один мобильный маркер 606. В этом варианте осуществления, маркер 606 является портативным компонентом, который может быть присоединен или иным образом переноситься людьми или оборудованием, которое подлежит отслеживанию системой 600. Маяк 604 является статичной привязкой в фиксированном местоположении, размещенной в предопределенной координате области позиционирования или области 620. В одном варианте осуществления, множество маяков 604, упорядоченных в массив, такой показанный на фиг. 4, размещается в области 620, чтобы обеспечивать возможность того, что все местоположения в пределах области 620 являются контролируемыми более чем одним маяком 604 и предпочтительно по меньшей мере тремя маяками 604. При некоторых условиях, измерения расстояния от маркера до по меньшей мере трех маяков 604 обеспечит достаточно информации для определения местоположения маркера 606 в пределах области 620.
[0028] Сервер 602 приложений в одном варианте осуществления подготавливает и отправляет информацию об установке и конфигурации маякам 604. Сервер 602 приложений также в одном варианте осуществления получает и обрабатывает информацию местоположения для маркера 606 и другую информацию от маяков 604 с целью отображения местоположения маркера 606 конечному пользователю, для архивации или для любого другого дополнительного анализа. Хотя показан один маркер 606, следует понимать, что множество маркеров 606 может находиться в местоположениях в пределах области 620. Сервер 602 приложений, в сочетании с маяками 604, используется в одном варианте осуществления для наблюдения местоположений множества маркеров 606 в пределах области 620. Сервер 602 приложений в одном варианте осуществления осуществляет связь с маяками 604 посредством сети малой мощности, как указано линиями 608, описанными дополнительно ниже.
[0029] Маяки 604 осуществляют связь с маркером 606 в одном варианте осуществления по линиям передачи данных, проиллюстрированным как линии 610 с использованием технологии сверхширокополосной (UWB) связи, как указано линиями 612 UWB сигналов определения дальности. UWB предоставляет потенциал достижения высокой точности определения дальности посредством измерений времени прихода (TOA) сигналов, даже в жестких внешних условиях, из-за своей способности разрешения многолучевых сигналов и проникновения в препятствия. Например, информация, относящаяся к расстоянию разделения между парой узлов A и B в сети UWB, может быть получена с использованием измерений задержки распространения сигнала или времени пролета (TOF)  , где d является действительным расстоянием между двумя узлами, и c является скоростью электромагнитных волн (c~3*108 м/с). Узлы A и B в различных вариантах осуществления могут быть множеством маяков 604 или маяком 604 и маркером 606, или множеством маркеров 606. В одном варианте осуществления, маркеры 606 являются маяками, предназначенными, чтобы быть мобильными указателями местоположения.
, где d является действительным расстоянием между двумя узлами, и c является скоростью электромагнитных волн (c~3*108 м/с). Узлы A и B в различных вариантах осуществления могут быть множеством маяков 604 или маяком 604 и маркером 606, или множеством маркеров 606. В одном варианте осуществления, маркеры 606 являются маяками, предназначенными, чтобы быть мобильными указателями местоположения.
[0030] Стандарт IEEE 802.15.4a-2011 является первым стандартом на основе UWB для низкоскоростных беспроводных сетей с возможностью локализации. Однако другие методы сверхширокополосной связи также могут быть использованы.
[0031] Например, предположим, что первый узел A передает к второму принимающему узлу B пакет, который содержит метку t1 времени, в которое пакет А был отправлен. Узел B получает пакет в момент времени t2. При идеальных условиях, то есть, когда узловые тактовые генераторы узлов A и B идеально синхронизированы с общей временной опорой, время пролета (Tf) может быть определено в узле B как Tf=t2 - t1. Расстояние между узлами A и B может быть оценено в этом однонаправленном определении дальности с использованием Tf. Однонаправленное определение дальности, однако, требует очень точной синхронизации между узлами, которую очень сложно поддерживать при помощи электронного оборудования низкой стоимости. Например, относительно малая 10 нсек ошибка синхронизации между узлами A и B будет давать ошибку определения дальности 3 метра.
[0032] На практике, оценка TOF часто производится при помощи двунаправленного определения дальности (TWR) (без общей временной опоры). При TWR, узел A передает пакет в узел B, который отвечает передачей пакета квитирования к узлу A спустя задержку Td ответа. Время двустороннего распространения (RTT) в узле A определяется по формуле TRT=2Tf+Td, откуда расстояние может быть оценено, полагая, что Td известно. Знание Td и TRT делает возможным вычисление Tf.
[0033] По определению, последовательность TWR UWB (на основе IEEE 802.15.4a-2011) выполняется между двумя узлами. Теоретически (в соответствии со стандартом), число измерений, которое может быть выполнено параллельно (на том же самом канале) без перекрестных помех ограничено 2 или 4 в зависимости от канала.
[0034] Из-за ослабления и отражений в некоторых средах, например, вызванных материалами конструкции и тому подобным, желательно иметь беспрепятственную линию визирования от мобильного маяка (такого как маркер 606) до по меньшей мере 3 маяков (таких как маяки 604), когда мобильный маяк/маркер находится в местоположении, покрытие которого должно обеспечиваться системой 600. В результате, может быть использовано большое число маяков 604.
[0035] Использование большого числа маяков 604 может накладывать ограничения на стоимость установки маяков 604. Таким образом, желательно, чтобы маяки 604 по меньшей мере частично получали питание от аккумуляторной батареи, и чтобы связь (такая как в сети 608 малой мощности) от маяков 604 до сервера 602 приложений была беспроводной. В некоторых вариантах осуществления, маяки могут использовать другие формы энергии, например, собранную известными способами, по меньшей мере для части их питающей мощности.
[0036] PS, такая как система 600, может также использовать тысячи маркеров для определения местоположения предметов и/или персонала. Для обновлений позиционирования (в соответствии с конкретной скоростью обновления системы 600 или маркера 606), каждый из маркеров 606 должен быть использован по меньшей мере в трех последовательностях TWR с маяками 604, чтобы иметь возможность оценивать свое текущее положение. В общем случае, скорость измерения определяется умножением числа маркеров 606, измерений на каждый маркер 606 и скорости обновлений.
[0037] Время двустороннего распространения TWR равно обычно порядка 1 миллисекунды. Для системы с тысячами маркеров 606 и скоростью обновления порядка от нескольких до десятков секунд, это означает, что координация измерения TWR тщательно контролируется для обеспечения возможности осуществления высокого числа измерений TWR без перекрестных помех.
[0038] В одном варианте осуществления, при TWR, узел B приведен в готовность в ожидании опроса от узла A. Для сбережения срока службы батареи в узле B (или маркере, или маяке), желательно, чтобы узел B начинал прослушивание непосредственно перед тем, как система A отправит опрос. В одном варианте осуществления, сервер приложений, такой как сервер 602 приложений, отправляет информацию планирования к маякам 604, таким как узел B, так что маяки 604 активируются для прослушивания непосредственно перед переносом опроса. В одном варианте осуществления, это производится по сети совместимой с IEEE 802.14.4-2003.
[0039] Другой функцией PS 600 является непрерывный перенос информации от маяков 604 в центральную станцию 602 приложения. Данные, переносимые между маяками 604 и центральной станцией 602 приложения, могут быть или необработанными измерениями дальности, или вычисленным положением маркера 606 (в зависимости от конфигурации системы 600). Информирование о необработанных измерениях, например, измерениях TWR и тому подобном, в одном варианте осуществления, производится по сети, совместимой с IEEE 802.14.4-2003.
[0040] IEEE 802.15.4-2003 имеет дело с низкой скоростью передачи данных, но очень долгим сроком службы батареи (месяцы или даже годы) и очень низкой сложностью. Стандарт определяет уровни как физические (Уровень 1), так и линии передачи данных (Уровень 2) модели взаимодействия открытых систем (OSI). Первое издание стандарта 802.15.4 было выпущено в мае 2003. Несколько стандартизированных и проприетарных протоколов сетевого (или ячеистого) уровня выполняются в сетях на основе 802.15.4, включая IEEE 802.15.5, ZigBee, 6LoWPAN, WirelessHART® и ISA100.11a.
[0041] Фиг. 4 является диаграммой, показывающей связь между сервером 602 приложений, маяками 604 и портативным маркером 606. В одном варианте осуществления, беспроводная сеть, такая как сеть WirelessHART®, используется в качестве базы для системы позиционирования, которая использует UWB (напр., IEEE 802.15.4a-2011) для измерений дальности. Сеть малой мощности, используемая для осуществления связи с маяками 604, проиллюстрирована в 608, наряду со сверхширокополосным сигналом 612 измерения дальности и линией 610 передачи данных между маркером 606 и одним или несколькими маяками 604. В проиллюстрированном примере, маяки 604 распределены по оборудованию (например, области 620) с шагом приблизительно 30 метров.
[0042] Хотя настоящее изобретение было описано со ссылкой на предпочтительные варианты осуществления, специалистам в данной области техники будет понятно, что изменения могут быть сделаны в форме и деталях без отступления от сущности и объема настоящего изобретения. Варианты осуществления настоящего изобретения могут быть использованы во внутренних, наружных или гибридных средах. Связь может осуществляться в соответствии с любым стандартом и не ограничивается системой связи типа ячеистой сети. Термин ʺRFʺ относится к радиочастоте любой подходящей длины волны. Как использовано в данном описании, термин ʺпривязкаʺ относится к базовому передатчику, местоположение которого известно и используется в качестве опорного местоположения при определении местоположения. Термин ʺмобильное устройствоʺ относится к устройству, такому как мобильная станция, местоположение которого идентифицируется. Блок обработки, который используется для определения местоположения, может постоянно находиться в мобильной станции, в одной или нескольких из станций привязки, в центральной станции или в некотором другом местоположении.
[0043] Опциональный модуль GPS, такой как модуль 504, показанный выше, может быть обеспечен в мобильной станции (такой как маркер 606) и может использоваться, когда сигнал GPS доступен. Протокол связи малой мощности (т.е., 608), такой как основанный на физическом уровне IEEE 802.15.4-2003, может использоваться в качестве базы для системы позиционирования, которая использует надежное определение дальности, достигаемое посредством использования протокола UWB определения дальности и связи малой мощности, например, на основании IEEE 802.15.4a-2011. Однако другие протоколы и методы определения дальности и связи могут быть использованы для реализации вариантов осуществления изобретения. Конфигурация обеспечивает точное определение местоположения низкой мощности, которое, по существу, защищено от ошибок многолучевого распространения. Новые методы арбитража делают возможным контроль местоположения многих тысяч маркеров. Транзитная связь между маяками и сервером предпочтительно использует метод связи низкой мощности, такой как WirelessHART®, ISA100, Zigbee® и Bluetooth® Low Energy и WAN на основе LORA®, или другие.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2697838C1 |
| ПРОВЕРКА ТРАНЗАКЦИИ, ОСУЩЕСТВЛЯЕМАЯ НЕСКОЛЬКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2711464C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕЖСЕТЕВОГО ВЗАИМОДЕЙСТВИЯ БЕСПРОВОДНЫХ ГЛОБАЛЬНЫХ СЕТЕЙ И БЕСПРОВОДНЫХ ЛОКАЛЬНЫХ СЕТЕЙ ИЛИ БЕСПРОВОДНЫХ ПЕРСОНАЛЬНЫХ ЛОКАЛЬНЫХ СЕТЕЙ | 2006 |
|
RU2417539C2 |
| КОНФИГУРИРОВАНИЕ ИНФОРМАЦИИ О КАЧЕСТВЕ ОБСЛУЖИВАНИЯ | 2008 |
|
RU2454012C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ В БЕСПРОВОДНОЙ СЕТИ СВЯЗИ | 2004 |
|
RU2372750C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ВЗАИМОДЕЙСТВИЯ ГЛОБАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ И ЛОКАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ИЛИ ПЕРСОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ | 2006 |
|
RU2378776C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ В БЕСПРОВОДНОЙ СЕТИ СВЯЗИ | 2009 |
|
RU2529420C2 |
| СОБСТВЕННАЯ WI-FI АРХИТЕКТУРА ДЛЯ СЕТЕЙ 802.11 | 2003 |
|
RU2340928C2 |
| СПОСОБЫ АВАРИЙНОЙ СВЯЗИ В СИСТЕМЕ ПРОТИВОПОЖАРНОЙ БЕЗОПАСНОСТИ | 2008 |
|
RU2458406C2 |
| МЕЖСИСТЕМНАЯ ПОДВИЖНОСТЬ В РЕЖИМЕ ОЖИДАНИЯ | 2008 |
|
RU2448429C2 |
Изобретение относится к системам позиционирования. Техническим результатом является повышение точности определения местоположения. Система (300) позиционирования включает в себя множество станций (302) привязки, каждая из которых выполнена с возможностью передачи радиочастотного сигнала (320). Мобильная станция (304) включает в себя радиочастотный приемопередатчик, выполненный с возможностью передачи и приема радиочастотного сигнала от по меньшей мере одной из множества станций (302) привязки. Блок (408, 506) обработки выполнен с возможностью определения информации местоположения мобильной станции (304) на основе переданного и принятого радиочастотного сигнала. Другая система позиционирования использует некоторое число маяков (604), определяющих дальность до некоторого числа мобильных маркеров (606) с помощью сверхширокополосного определения дальности (612) и осуществляющих беспроводную связь с сервером (602) приложений. 2 н. и 21 з.п. ф-лы, 4 ил.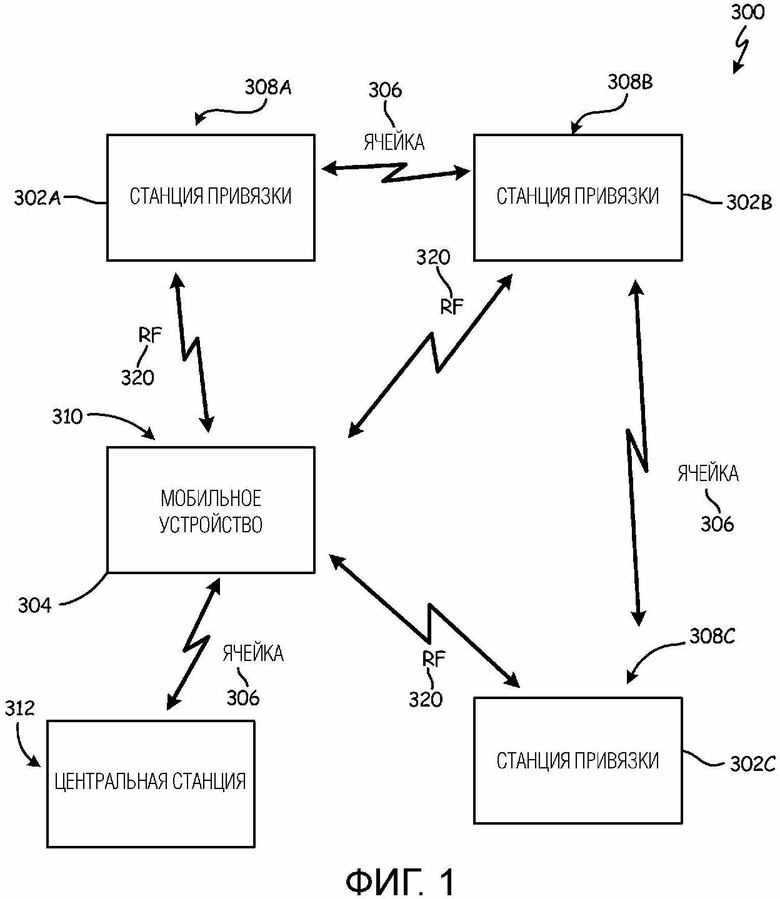
1. Система позиционирования, содержащая:
множество маяков, каждый из которых получает питание от батареи и выполнен с возможностью осуществления беспроводной связи; и
сервер приложений, выполненный с возможностью осуществления беспроводной связи с маяками на основании стандарта связи, причем сервер приложений дополнительно выполнен с возможностью приема и обработки информации местоположения от множества маяков, причем сервер приложений дополнительно выполнен с возможностью переноса информации к маякам для подготовки к измерению TWR непосредственно перед началом измерения TWR.
2. Система позиционирования по п. 1, в которой множество маяков содержит множество маяков в фиксированном местоположении и по меньшей мере одним мобильный маяк.
3. Система позиционирования по п. 2, в которой по меньшей мере один мобильный маяк выполнен с возможностью осуществления связи с множеством маяков с фиксированным местоположением, причем определение дальности между по меньшей мере одним мобильным маяком и множеством маяков с фиксированным местоположением основано на сверхширокополосной (UWB) технологии.
4. Система позиционирования по п. 1, в которой стандарт связи содержит сетевой протокол, совместимый с IEEE 802.15.4-2003, или в которой стандарт связи содержит WirelessHART®.
5. Система позиционирования по п. 1, дополнительно содержащая:
маркер, выполненный с возможностью осуществления связи с множеством маяков, причем определение дальности между маркером и множеством маяков основано на сверхширокополосной (UWB) технологии.
6. Система позиционирования по п. 5, причем технология UWB совместима со стандартом связи.
7. Система позиционирования по п. 6, в которой стандарт связи является стандартом, совместимым с IEEE 802.15.4a-2011.
8. Система позиционирования по п. 1, дополнительно содержащая:
маркер, выполненный с возможностью осуществления временной синхронизации с множеством маяков, причем временная синхронизация между множеством маяков и маркером сконфигурирована для двунаправленного определения дальности (TWR) между маяком из множества маяков и маркером.
9. Система позиционирования по п. 8, в которой координация измерений TWR между маяком из множества маяков и маркером основана на механизме собственной временной синхронизации сети, совместимой с IEEE 802.15.4-2003.
10. Система позиционирования по п. 8, в которой сервер приложений выполнен с возможностью назначения временных интервалов для измерений TWR.
11. Система позиционирования по п. 8, в которой сервер приложений дополнительно выполнен с возможностью назначения временных интервалов для измерений TWR между маяком из множества маяков и маркером, причем информация, которая определяет временные интервалы для TWR между маяками и маркерами, переносится от сервера приложений к маякам посредством сети, совместимой с IEEE 802.15.4-2003.
12. Система позиционирования по п. 11, в которой временные интервалы для измерений TWR назначаются для предотвращения перекрестных помех между множеством измерений TWR.
13. Система позиционирования по п. 1, в которой множество маяков выполнены с возможностью передачи информации, относящейся к необработанным измерениям TWR сервера приложений, посредством сети, совместимой с IEEE 802.15.4-2003.
14. Система позиционирования по п. 3, в которой информация, относящаяся к положению маркера, переносится от по меньшей мере трех из множества маяков в сервер приложений посредством сети, совместимой с IEEE 802.15.4-2003.
15. Система позиционирования по п. 1, в которой сервер приложений дополнительно выполнен с возможностью переноса информации установки и конфигурации для множества маяков, включая местоположения маяков, к множеству маяков посредством сети, совместимой с IEEE 802.15.4-2003.
16. Способ определения положения мобильного маркера в системе, содержащей сервер приложений и множество маяков в фиксированном местоположении, содержащий:
соединение множества маяков и сервера приложений с первой сетью беспроводной связи;
назначение, в сервере приложений, множества временных интервалов для двунаправленных операций определения дальности с использованием отдельной сети связи от первой беспроводной сети связи, между маяком из множества маяков и мобильным маркером;
определение дальности мобильного маркера по отношению к по меньшей мере трем маякам из множества маяков и
перенос информации мобильного маркера от множества маяков в сервер приложений, причем сервер приложений дополнительно выполнен с возможностью переноса информации к маякам для подготовки к измерению TWR непосредственно перед началом измерения TWR.
17. Способ по п. 16, в котором определение дальности содержит:
передачу от маяка из множества маяков пакета с известным временем передачи и
прием в маяке обратного сигнала в ответ на прием пакета от мобильного маркера.
18. Способ по п. 16, в котором беспроводная связь между маяками и сервером приложений выполняется на основании стандарта связи, причем связь выполняется по сетевому протоколу, совместимому с IEEE 802.15.4-2003, причем связь выполняется по сети WirelessHART®, причем определение дальности между маркером и маяком из множества маяков основано на сверхширокополосной (UWB) технологии, совместимой со стандартом связи, или причем определение дальности выполняется по сети, совместимой со стандартом IEEE 802.15.4a-2011.
19. Способ по п. 18, в котором временная синхронизация для множества маяков и маркера для координации измерений дальности основана на механизме внутренней временной синхронизации сети, совместимой с IEEE 802.15.4-2003.
20. Способ по п. 18, в котором информация, которая определяет множество временных интервалов для определения дальности между множеством маяков и маркером, предотвращает перекрестные помехи между множеством измерений.
21. Способ по п. 20, в котором информация, которая определяет множество временных интервалов, переносится от сервера приложений к множеству маяков посредством сети, совместимой с IEEE 802.15.4-2003.
22. Способ по п. 17, дополнительно содержащий:
инструктирование множества маяков, чтобы инициировать операцию считывания непосредственно перед опросом, переносимым к множеству маяков от сервера приложений.
23. Способ по п. 18, дополнительно содержащий перенос информации, которая позволяет множеству маяков начать прослушивание непосредственно перед опросом, переносимым от сервера приложений к множеству маяков, перенос информации, относящейся к измерениям дальности, от множества маяков в сервер приложений посредством сети, совместимой с IEEE 802.15.4-2003, перенос информации, относящейся к местоположениям маркера, от множества маяков в сервер приложений посредством сети, совместимой с IEEE 802.15.4-2003, или перенос информации дистанционной установки и конфигурирования для множества маяков, включая местоположения для множества маяков, от сервера приложений к множеству маяков посредством сети, совместимой с IEEE 802.15.4-2003.
| US2008032705 А1, 07.02.2008 | |||
| US2011110242 А1, 12.05.2011 | |||
| US6492906 B1, 10.12.2002 | |||
| US2012087272 А1, 12.04.2012 | |||
| US2009201850 A1, 13.08.2009 | |||
| СПОСОБ И СИСТЕМА СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2383898C2 |

