УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее раскрытие относится к системам позиционирования. А именно, настоящее раскрытие относится к системам, используемым для идентификации местоположения или отслеживания объектов в данной области.
[0002] Система позиционирования (PS) является сетью устройств, используемых для беспроводного определения местоположения объектов или людей в здании или в плотнозастроенных промышленных зонах. Необходима специальная конструкция, так как системы глобальной системы позиционирования (GPS), как правило, не подходят для установления местоположения в закрытых помещениях или других стесненных местоположениях, поскольку они требуют линии прямой видимости без препятствий с четырьмя или более спутниками GPS. Микроволны будут ослабляться и рассеиваться крышами, стенами и другими объектами, а многократные отражения от поверхностей вызывают многолучевое распространение, приводящее к неконтролируемым ошибкам.
[0003] Время прохождения (ToF) является величиной времени, которое необходимо сигналу для распространения от передатчика до приемника. Поскольку скорость распространения сигнала постоянна и известна, время в пути сигнала может использоваться непосредственно для вычисления расстояния. Несколько (в GPS по меньшей мере четыре спутника) измерений относительно нескольких станций привязки может комбинироваться с трилатерацией для нахождения местоположения.
[0004] Поскольку скорость света равна 3×108 м/с, в системах на основе радиочастот (RF) погрешность в синхронизации часов является ключевым фактором ошибки позиционирования. В GPS ToF в общем требует сложного механизма синхронизации для поддержания надежного источника времени для датчиков.
[0005] Кроме того, точность способов на основе ToF часто страдает от условий большой многолучевости в ситуациях с определением местоположения в плотнозастроенных местах, таких как местоположения внутри закрытых помещений и промышленное окружение, которые могут быть стесненными, что вызвано отражением и дифракцией RF сигнала от объектов.
[0006] Из-за ослабления и отражений, вызванных строительными материалами, желательно иметь линию прямой видимости без препятствий по меньшей мере с тремя точками привязки в любом местоположении, которое должно быть покрыто системой. В результате необходимо большее число станций привязки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Система позиционирования на основе ультраширокополосного двухпроходного определения расстояния в соответствии с одним вариантом осуществления включает в себя множество активных меток, каждая из которых имеет положение, и множество радиомаяков, выполненных с возможностью определения положения метки из множества активных меток. Множество активных меток и множество радиомаяков непрерывно синхронизируются с общим временным базисом.
[0008] Способ определения положения активной метки в системе, имеющей сервер приложений и множество радиомаяков с фиксированными местоположениями, включает в себя, в одном варианте осуществления, этапы, на которых обеспечивают общий временной базис для множества радиомаяков с фиксированными местоположениями и обеспечивают сообщение синхронизации от каждого из множества радиомаяков с фиксированными местоположениями. Активная метка регистрируется в общем временном базисе на основании сообщения синхронизации. Определяется расстояние от активной метки по меньшей мере до части из множества радиомаяков. Активная метка сообщает о своем положении по меньшей мере одному радиомаяку из множества радиомаяков.
[0009] Система позиционирования в соответствии с другим вариантом осуществления содержит множество активных меток и множество радиомаяков с фиксированным положением, осуществляющих связь со множеством активных меток по сети на основе ультраширокополосного двухпроходного определения расстояния. Каждая активная метка из множества активных меток в системе имеет глобально назначенное окно для опросов двухпроходного определения расстояния между ней и по меньшей мере одним из множества радиомаяков. Множество радиомаяков принимает опросы двухпроходного определения расстояния в пределах глобально назначенного окна. Множество активных меток сообщает о положениях в глобальном временном интервале отчета.
[0010] Эта сущность изобретения и реферат обеспечены для ознакомления с набором концепций в упрощенной форме, которые дополнительно описываются ниже в подробном описании. Сущность изобретения и реферат не предназначены для идентификации главных или существенных признаков заявленного предмета изобретения, как не предназначены они и для использования в качестве средства для определения объема заявленного предмета изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
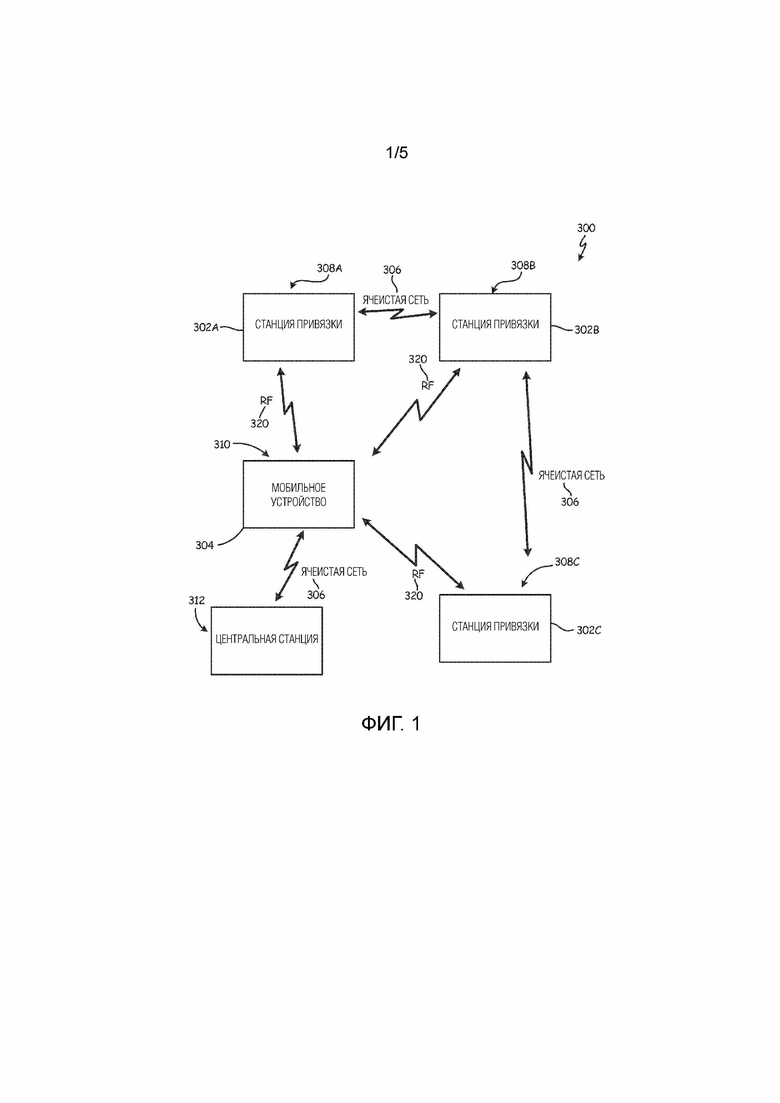
[0011] Фиг. 1 показывает блок-схему системы позиционирования в соответствии с одним вариантом осуществления настоящего раскрытия.
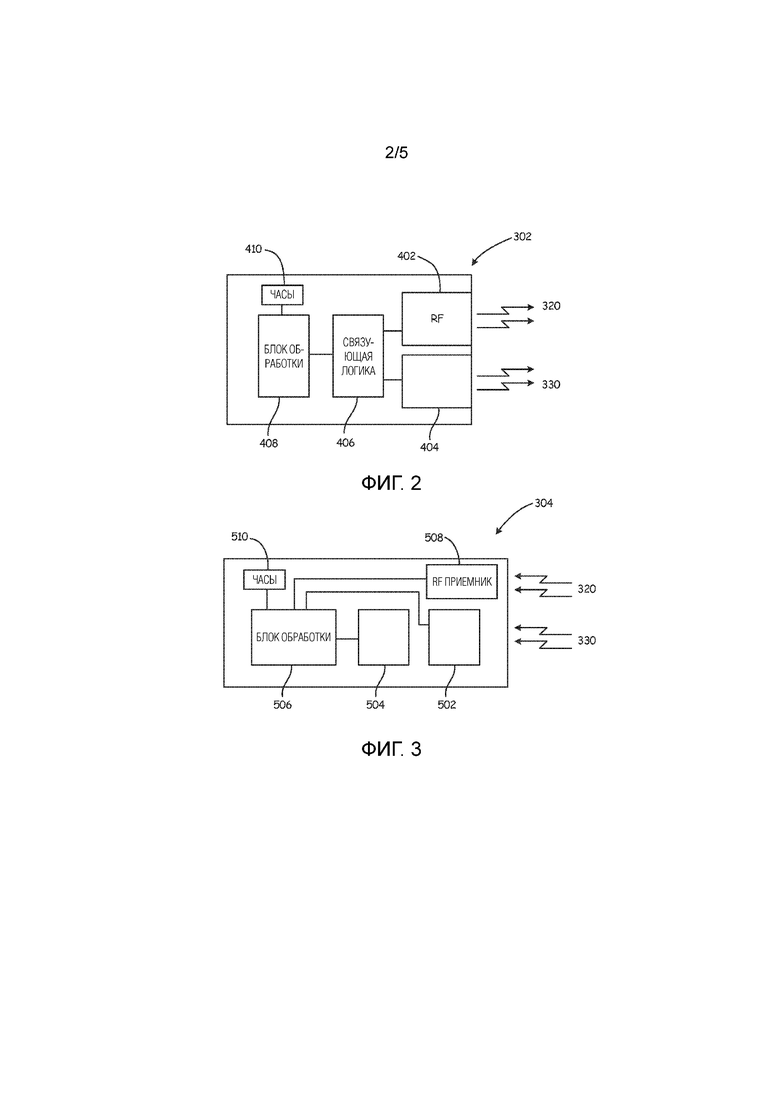
[0012] Фиг. 2 является блок-схемой станции привязки в соответствии с одним вариантом осуществления настоящего раскрытия.
[0013] Фиг. 3 является блок-схемой мобильной станции в соответствии с одним вариантом осуществления настоящего раскрытия.
[0014] Фиг. 4 является блок-схемой, показывающей центральное местоположение, станции привязки и мобильную станцию.
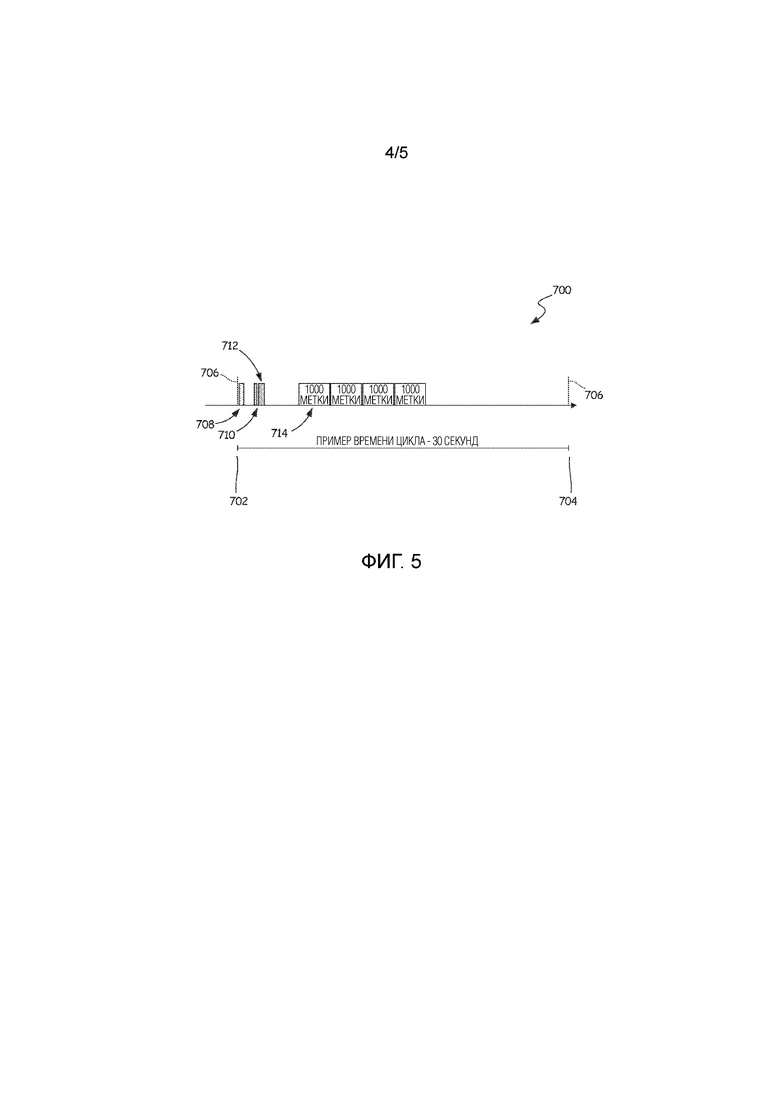
[0015] Фиг. 5 является временной диаграммой, показывающей моменты времени между коммуникационными сигналами радиомаяка и отчетами о положении метки.
[0016] Фиг. 6 является схемой, показывающей глобальное окно временного интервала, когда два радиомаяка ожидают сообщения от метки.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0017] В одной конкретной конфигурации система основана на коммерчески доступной промышленной ячеистой сети, такой как сеть WirelessHART® (IEC 62591), которая показана в форме блок-схемы на фиг. 1.
[0018] Фиг. 1 показывает систему 300, имеющую множество станций 302 привязки (или «радиомаяков») (три станции 302A, 302B и 302C привязки показаны на фиг. 3 и описываются более подробно ниже), которые расположены в известных местоположениях, и мобильную станцию (также называемую «меткой», «портативным блоком» или «PU») 304 (описываемую более подробно ниже), для которой необходимо определить положение 310. Станции 302 привязки в одном варианте осуществления являются частью ячеистой беспроводной сети 306, такой как сеть WirelessHART®. При работе множество станций 302 привязки расположено в известных местоположениях 308A, 308B и 308C вокруг отслеживаемой области. Мобильная станция 304 расположена на или в непосредственной близости от объекта, для которого необходимо определить положение 310. Объект может быть, только в качестве примера, а не ограничения, частью инвентаря или человеком.
[0019] В одном варианте осуществления, как показано на фиг. 1, для определения расстояния от станции 302 привязки до мобильной станции 304 станция 302 привязки передает RF-сообщение 320 (то есть сообщение WirelessHART®). Как обсуждается ниже, сигналы WirelessHART® позволяют осуществлять синхронизацию, так как они могут содержать синхронизационную информацию, а также позволяют передавать данные, как известно в области техники. Использование этой возможности синхронизации и передачи данных позволяет использовать RF-импульс в качестве уникального синхронизационного импульса, так что возможно знать, какая станция 302 привязки или мобильная станция 304 осуществляет передачу в дополнение к тому, когда передача сделана. Разница во времени между передачей RF импульса и получением ответа позволяет определять расстояние между мобильной станцией и передающей станцией 302 привязки. Местоположение для мобильной станции может быть определено с использованием вычислений расстояния от трех отдельных станций привязки, например, используя трилатерацию.
[0020] TDMA является известным стандартом для совместного использования частотного канала в сети путем деления сигнала на несколько временных интервалов. Каждая станция, такая как станции 302 привязки, описанная в настоящем описании, может совместно использовать частоту, используемую для импульсов, путем назначения конкретного временного интервала для передач. В одном варианте осуществления центральная станция 312, приняв информацию от одной или несколько мобильных станций 304 относительно ее/их положения(й), использует определенные положения для настройки сегментирования на временные интервалы в TDMA. Центральная станция 312 используется в системе 300, она соединена с ячеистой сетью 306 для приема информации от одной или нескольких мобильных станций 304. Временные интервалы для станций 302 привязки назначаются центральной станцией 312. Может использоваться любая подходящая технология связи, в том числе технологии CDMA или другие технологии сегментирования или совместного использования времени и/или частоты. Альтернативно или дополнительно станции 302 привязки могут осуществлять связь непосредственно с центральной станцией 312.
[0021] В одном варианте осуществления информация о местоположении для одной или нескольких мобильных станций 304 используется для настройки временных интервалов для различных станций привязки. Например, когда положение 310 мобильной станции ближе к некоторым станциям 302 привязки, чем другим, временные интервалы для станций 302 привязки на большем расстоянии могут быть расширены, обеспечивая прохождение и получение импульсов без перекрытия с другими станциями 302 привязки из-за расстояния. Центральная станция 312 в одном варианте осуществления отслеживает расстояния от каждой станции 302 привязки в прямой видимости до каждой мобильной станции 304 и настраивает временные интервалы для станций привязки в соответствии с ожидаемым временем распространения для уменьшения перекрестных помех между станциями 302 привязки. Кроме того, также могут использоваться кодирование импульса и различные частоты, включая широкополосные методики, для уменьшения перекрестных помех между близкими станциями 302 привязки или другими станциями привязки.
[0022] Все станции 302 привязки системы являются зарегистрированными устройствами в сети 300, таким образом каждая точка 302 привязки является устройством WirelessHART® с RF-передатчиком 402. Кроме того, станция 302 привязки содержит опциональный модуль 404 связи, который может осуществлять связь с использованием сигналов 330 связи и некоторой связующей логики 406.
[0023] Подробности для станции 302 привязки показаны на фиг. 2. Каждая станция 302 привязки включает в себя в одном вариант осуществления RF-передатчик (то есть WirelessHART®) 402, модуль 404 связи, связующую логику 406 для обеспечения взаимодействия между различными более сложными логическими схемами, такими как RF-передатчик 402 и модуль 404 связи, блок 408 обработки и т.п. в станции 302 привязки и часы 410. Связующая логика 406 известна в области техники и не будет описываться дополнительно в настоящем описании. Кроме того, WirelessHART® является известным стандартом для беспроводной сети датчиков на основании протокола Магистральный адресуемый дистанционный преобразователь (HART®). В одном варианте осуществления станции 302 привязки являются частью ячеистой сети устройств, так что каждая станция 302 привязки является устройством WirelessHART® в беспроводной ячеистой сети 306. Часы 410 функционально связаны в одном варианте осуществления с блоком 406 обработки, чтобы позволить блоку 406 обработки определять время передачи сигналов, таких как RF-сигнал 320. В другом варианте осуществления часы 410 могут быть частью блока 406 обработки.
[0024] Как изображено на фиг. 3, в одной конфигурации мобильная станция 304 также является устройством WirelessHART® с опциональным блоком 502 связи, опциональным блоком 504 GPS, небольшим блоком 506 обработки и RF приемником 508.
[0025] Мобильная станция 304 включает в себя в одном варианте осуществления опциональный модуль 502 связи, опциональный блок 504 GPS для использования в местоположениях вне помещений, блок 506 обработки, RF-приемник 508 и часы 510. RF-приемник 508 функционально связан с блоком 506 обработки. Часы 510 функционально связаны в одном варианте осуществления с блоком 506 обработки, чтобы позволить блоку 506 обработки определять время приема сигналов, таких как RF-сигнал 320. В другом варианте осуществления часы 510 могут быть частью блока 506 обработки.
[0026] Чтобы вычислить свое положение, мобильная станция 304 измеряет расстояние по меньшей мере до трех станций 302 привязки. Три станции 302 привязки позволяют адекватно определять положение, например, с помощью трилатерации для мобильной станции 304, которая находится в прямой видимости каждой из станций 302 привязки, но в случае, если в области имеется больше точек 302 привязки, избыточность может быть использована для повышения надежности измерения. Хотя на фиг. 3 показаны три станции 302 привязки (соответственно 302A, 302B и 302C), следует понимать, что для полного покрытия области могут использоваться дополнительные станции привязки для увеличения точности определения положения 310 и обеспечения большего числа потенциальных возможностей прямой видимости для всех частей области, которая должна быть покрыта системой 300. Кроме того, хотя показан одна мобильная станция 304, в отслеживаемой области могут быть расположены несколько мобильных станций 304, и система 300 может использовать одно и то же множество станций 302 привязки, передающих RF сигнал, для определения нескольких местоположений 310 нескольких мобильных станций 304. Мобильная 304 станция сообщает полученную информацию центральной станции 312 через сеть 306. Центральная станция 312 может выполнять алгоритм, который оптимизирует временные интервалы TDMA в соответствии с текущими положениями 310 мобильных станций 304 и может соответственно модифицировать сетевые параметры. Так как местоположения станций 302 привязки могут быть переданы по сети, в пределах ячеистой сети выполнять определение положения мобильной станции 304 в различных вариантах осуществления могут станции 302 привязки, мобильные станции 304 или центральная станция 312.
[0027] В некоторых ситуациях положение мобильной станции может быть определено с использованием менее чем трех станций привязки. Такая ситуация включает в себя, в качестве примера, но не ограничения, ситуацию, в которой имеется некоторая внешняя информация, известная о мобильной станции, например, что она расположена в коридоре или другой известной ограниченной области, или в которой известна другая информация отслеживания для мобильной станции. В таких ситуациях положение может быть определено с использованием всего лишь одной станции привязки.
[0028] В одном варианте осуществления обеспечена система позиционирования (PS), в которой используется сеть устройств для беспроводного определения местоположения объектов или людей в здании или в плотнозастроенных промышленных зонах. Обеспечен вариант осуществления системы, который не обязательно полагается на GPS для определения местоположения. Кроме того, микроволны будут ослабляться и рассеиваться крышами, стенами и другими объектами, особенно внутри помещений. Более того, многократные отражения от поверхностей могут вызывать многолучевое распространение, приводящее к неконтролируемым ошибкам.
[0029] Вариант 600 осуществления PS, использующий ультраширокополосную связь между радиомаяками и метками системы, показан в виде блок-схемы на фиг. 4. PS 600 содержит в одном варианте осуществления сервер 602 приложений, множество радиомаяков 604 и по меньшей мере одну мобильную метку 606. В этом варианте осуществления метка 606 является портативным компонентом, который может быть прикреплен или иным образом переноситься людьми или оборудованием, которое должно отслеживаться системой 600. Радиомаяк 604 имеет фиксированное положение, является статической привязкой, размещенной в заранее заданной координате площадки или области 620 позиционирования. В одном варианте осуществления множество радиомаяков 604, расположенных в массиве, таком как показанный на фиг. 4, расположено на площадке 620, чтобы из всех местоположений на площадке 620 были видимы более чем один радиомаяк 604 и предпочтительно по меньшей мере три радиомаяка 604. В некоторых условиях измерения расстояния от метки до по меньшей мере трех радиомаяков 604 будет обеспечивать достаточно информации для определения положения метки 606 на площадке 620.
[0030] Сервер 602 приложений в одном варианте осуществления подготавливает и посылает настроечную и конфигурационную информацию радиомаякам 604. Также в одном варианте осуществления сервер 602 приложений принимает и обрабатывает информацию о положении для метки 606 и другую информацию от радиомаяков 604 с целью отображения положения метки 606 конечному пользователю для архивации или для любого другого дальнейшего анализа. Хотя показана одна метка 606, следует понимать, что в положениях на площадке 620 может быть множество меток 606. Сервер 602 приложений в сочетании с радиомаяками 604 используется в одном варианте осуществления для отслеживания положения множества меток 606 на площадке 620. Сервер 602 приложений в одном варианте осуществления осуществляет связь с радиомаяками 604 через сеть малой мощности, как обозначено с помощью линий 608, описанных дополнительно ниже.
[0031] Фиг. 4 является схемой, показывающей осуществление связи между сервером 602 приложений, радиомаяками 604 и мобильной меткой 606. В одном варианте осуществления беспроводная сеть, такая как сеть WirelessHART®, используется в качестве основы для системы позиционирования, которая использует UWB (например, IEEE 802.15.4a-2011) для измерений расстояния. Сеть малой мощности, используемая для осуществления связи с радиомаяками 604, изображена под номером 608, наряду с ультраширокополосным сигналом 612 определения расстояния и каналом 610 передачи данных между меткой 606 и одним или несколькими радиомаяками 604. В изображенном примере радиомаяки 604 распределены по объекту (например, площадке 620) с расстоянием друг от друга приблизительно 30 метров.
[0032] В одном варианте осуществления радиомаяки 604 осуществляют связь с меткой 606 через каналы передачи данных, изображенные в виде линий 610, с использованием ультраширокополосной (UWB) технология, как обозначено с помощью линий 612 UWB сигналов определения расстояния. UWB предлагает возможность достижения высокой точности определения расстояния с помощью измерений времени прихода (TOA) сигнала даже в жестких условиях благодаря его способности различать многолучевые сигналы и проходить сквозь препятствия. Например, информация, относящаяся к расстоянию между парой узлов A и B в UWB сети, может быть получена с использованием измерения задержки распространения сигнала, или времени прохождения (TOF) (1) Tf= , где d является фактическим расстоянием между этими двумя узлами, а c является скоростью электромагнитных волн (c 3*108 м\с). Узлы A и B в различных вариантах осуществления могут быть несколькими радиомаяками 604, или радиомаяком 604 и меткой 606, или несколькими метками 606. В одном варианте осуществления метки 606 являются радиомаяками, которые предназначены для того, чтобы быть мобильными локаторами положения.
, где d является фактическим расстоянием между этими двумя узлами, а c является скоростью электромагнитных волн (c 3*108 м\с). Узлы A и B в различных вариантах осуществления могут быть несколькими радиомаяками 604, или радиомаяком 604 и меткой 606, или несколькими метками 606. В одном варианте осуществления метки 606 являются радиомаяками, которые предназначены для того, чтобы быть мобильными локаторами положения.
[0033] Стандарт IEEE 802.15.4a-2011 является первым стандартом на основе UWB для низкоскоростных беспроводных сетей с возможностью определения местоположения. Однако также могут использоваться другие технологии ультраширокополосной связи.
[0034] Например, предположим первый узел передает второму принимающему узлу B пакет, который содержит временную отметку t1, когда быть отправлен пакет А. Узел B принимает пакет в момент t2 времени. В идеальных условиях, то есть когда часы узлов A и B идеально синхронизированы с эталонным единым временем, время прохождения (Tf) может быть определено в узле B как (2) Tf=t2-t1. Расстояние между узлами A и B может быть оценено в этом однопроходном определении расстояния с использованием Tf. Однако однопроходное определение расстояния требует очень точной синхронизации между узлами, которую очень трудно поддерживать с дешевой электроникой. Например, относительно небольшая 10 нс ошибка синхронизации между узлами A и B приведет к ошибке определения расстояния в 3 метра.
[0035] На практике оценка TOF часто делается с двухпроходным определением расстояния (TWR) (без эталонного единого времени). В TWR узел передает пакет узлу B, который отвечает передачей пакета подтверждения узлу А после задержки Td ответа. Время прохождения сигнала в обоих направлениях (TRT) в узле A определяется как (3) TRT=2Tf+Td, откуда может быть оценено расстояние, полагая, что Td известно. Знание Td и TRT позволяет вычислить Tf.
[0036] В некоторых вариантах осуществления предполагается, что точность часов как в метках 606, так и в радиомаяках 604 ограничена в диапазоне 1-10 частей на миллион (PPM). Неточность часов может генерировать значительную разницу в Td между меткой 606 и радиомаяком 604. Например (см. уравнение 3), для номинального значения Td в 0.5 мс ошибка в 10 ppm. приводит к 5 наносекундой (нс) ошибке TRT, которая эквивалентна ошибке определения расстояния приблизительно в 0.75 метров.
[0037] По определению, последовательность UWB (на основе IEEE 802.15.4a-2011) TWR делается между двумя узлами. Теоретически, (в соответствии со стандартом) число измерений, которое может быть сделано параллельно (на одном и том же канале) без перекрестных помех ограничено 2 или 4 в зависимости от канала.
[0038] Из-за затухания и отражений в некоторых средах, например, вызванных строительными материалами и т.п., желательно иметь линию прямой видимости без препятствий от мобильного радиомаяка (такого как метка 606) по меньшей мере к 3 радиомаякам (таким как радиомаяки 604), когда мобильный радиомаяк/метка находится в любом местоположении, которое должно покрываться системой 600. В результате может использоваться большое количество радиомаяков 604.
[0039] Использование большого количества радиомаяков 604 может накладывать ограничения на стоимость установки радиомаяков 604. Поэтому желательно, чтобы радиомаяки 604 были по меньшей мере частично c батарейным питанием, и чтобы связь (такая как в сети 608 малой мощности) радиомаяков 604 с сервером 602 приложений была беспроводной связью. В некоторых вариантах осуществления радиомаяки могут использовать другие формы энергии, например, полученные известным образом, по для меньшей мере части их питания.
[0040] PS, такая как система 600, также может использовать тысячи меток для определения положения предметов и/или персонала. Для обновления положений (в соответствии с частотой обновления, зависящей от системы 600 или метки 606) каждая из меток 606 должна быть вовлечена по меньшей мере в три последовательности TWR с радиомаяками 604, чтобы иметь возможность оценить ее текущую позицию. В общем частота измерений является произведением числа меток 606, измерений на метку 606 и частоты обновления.
[0041] Время прохождения сигнала в обоих направлениях TWR, как правило, порядка 1 миллисекунды. Для системы с тысячами меток 606 и частотой обновления порядка от нескольких до десятков секунд это означает, что координацией измерений TWR тщательно управляют, чтобы позволить высокое число измерений TWR без перекрестных помех.
[0042] В одном варианте осуществления при TWR узел B приведен в готовность, ожидая опроса от узла A. Для увеличения времени работы от батареи узла B (либо метки, либо радиомаяка), желательно, чтобы узел B начинал ожидание как раз перед отправкой системой A опроса. В одном варианте осуществления сервер приложений, такой как сервер 602 приложений, посылает информацию планирования радиомаякам 604, таким как узел B, так что радиомаяки 604 активируются для ожидания как раз вовремя перед передачей опроса. В одном варианте осуществления это выполняется через IEEE 802.14.4-2003 совместимую сеть.
[0043] Может быть желательно, чтобы некоторые метки 606 в системе 600 имели более низкую частоту обновления, чем другие. Например, метка 606, которая прикреплена к оборудованию, может работать с более низкой частотой обновления, чем на работнике промышленного предприятия, например, если оборудование, к которому она прикреплена, с меньшей вероятность будет мобильным, чем работник промышленного предприятия, или с большой вероятностью будет перемещаться в некоторой известной области и т.п. Система 600 в одном варианте осуществления отслеживает множество меток и обновляет по меньшей мере одну метку из множества меток с меньшей частотой, чем другие метки, в зависимости от определенных условий этой по меньшей мере одной метки, таких как оборудование, с которым ассоциирована эта по меньшей мере одна метка.
[0044] Другой функцией PS 600 является непрерывная передача информации от радиомаяков 604 центральной станции 602 приложений. Данные, передаваемые между радиомаяками 604 и центральной станцией 602 приложений, могут быть либо необработанными измерениями для определения расстояния, либо вычисленным положением метки 606 (в зависимости от конфигурации системы 600). Информация о необработанных измерениях, таких как измерения TWR и т.п., в одном варианте осуществления передается по IEEE 802.14.4-2003 совместимой сети.
[0045] В системе 600 обеспечена архитектура системы, которая решает проблемы системы 600 позиционирования для большого числа меток, таких как метки 606, и радиомаяков, таких как радиомаяки 604. Система 600 в некоторых вариантах осуществления обеспечивает одно или несколько преимуществ. Одним преимуществом является эффективная координация измерений метки/радиомаяка без взаимной интерференции таким образом, что увеличивается частота измерений для определения расстояния в системе 600. Другим преимуществом является различная частота обновления для различных типов меток. Еще одним преимуществом является работа с малой мощностью, при которой рабочая последовательность как для меток 606, так и для радиомаяков 604 спроектирована таким образом, что уменьшается рассеяние мощности, и метки 606 и/или радиомаяки 604 могут быть в спящем режиме, если не нужно выполнять никаких действий. Другим преимуществом является калибровка дрейфа часов между радиомаяками 604 и метками 606 для компенсации дрейф часов между временными базисами блоков.
[0046] В одном варианте осуществления обеспечена следующая архитектура для работы в системе, такой как система 600:
[0047] Все радиомаяки 604 работают как узлы по сети 608 малой мощности, которая обеспечивает двунаправленную связь между радиомаяками 604 и сервером 602 приложений. В одном варианте осуществления в качестве этой сети малой мощности используется IEEE 802.15.4a-2011. В одном варианте осуществления сеть 608 обеспечивает общий временной базис для всех узлов (то есть радиомаяков 604) таким образом, что вся система 600 синхронизируется в период времени от 1 до нескольких миллисекунд, что можно считать стандартным требованием для широко используемых сетей. Это время для синхронизации приблизительно на 6 порядков ниже, чем используемое для UWB определения расстояния.
[0048] Радио-канал передачи данных между метками 606 и радиомаяками 604 может быть основан на UWB-радио 612 или на специализированном канале 610 передачи данных, который работает по другой стандартной технологии. Двухпроходное определение расстояния (TWR) в одном варианте осуществления инициируется меткой 606. Метка 606 вычисляет свое положение на площадке 620 на основании измерений TWR до радиомаяков 604, которые расположены поблизости, или которые по меньшей мере находятся на связи на линии прямой видимости с меткой 606. Как только метка 606 определяет свое положение, метка сообщает это определенное положение радиомаяку 604. Положения меток 606, которые сообщаются радиомаякам 604, затем передаются серверу 602 приложений через сеть 608 малой мощности. В одном варианте осуществления каждая метка 606 поддерживает список радиомаяков 604 и координаты каждого радиомаяка 604.
[0049] В одном варианте осуществления каждый радиомаяк 604 и каждая метка 606 в системе 600 имеют уникальный системный ID. Этот системный ID может быть назначен центральным сервером 602 приложений, он позволяет распространять информацию от центрального сервера 602 приложений конкретным радиомаяками 604 и/или меткам 606, как было описано выше.
[0050] В одном варианте осуществления каждая метка 606 имеет уникальный активный ID. В одном варианте осуществления системы активный ID идентичен системному ID. В другом варианте осуществления активный ID может быть временным, как часть некоторой процедуры регистрации.
[0051] В одном варианте осуществления система, такая как система 600, имеет время глобального цикла порядка десятков секунд. Каждый цикл каждый из радиомаяков 604 передает короткое сообщение синхронизации, которое включает в себя ID и координаты этого радиомаяка. Сообщение синхронизации посылается в заранее заданном временном интервале в цикле (в одном варианте осуществления заранее заданное время смещения от времени начала цикла). В одном варианте осуществления заранее заданный временной интервал для радиомаяка 604 назначается центральным сервером 602 приложений с использованием протокола назначения, такого как TDMA, как обсуждалось в настоящем описании.
[0052] Время сообщения радиомаяка 604 как смещение от начала цикла может быть вычислено в одном варианте осуществления, зная ID радиомаяка. Зная ID радиомаяка известно и может быть вычислено заранее заданное время смещения на основании времени начала цикла.
[0053] Метки 606 в одном варианте осуществления являются непрерывно активными для обнаружения всех или некоторых из сообщений синхронизации радиомаяка. После получения сообщения синхронизации меткой 606, метка 606 находится в полной синхронизации с часами радиомаяка 604 и поэтому синхронизирована с сетевым глобальным временным базисом в пределах диапазона точности синхронизации сети.
[0054] В одном варианте осуществления система 600 использует глобальное окно регистрации, имеющее длину в K временных интервалов. Радиомаяки 604 активны для обнаружения регистрационного сообщения метки 606 в этом окне.
[0055] В одном варианте осуществления имеются уникальные глобальные временные интервалы, назначенные в цикле для каждого активного ID меток 606. Уникальные глобальные временные интервалы включают в себя временные интервалы сообщения с отчетом о положении и интервалы измерения расстояния. Во временном интервале сообщения с отчетом о положении метка 606 сообщает свое последнее (измеренное и вычисленное) положение в этот временной интервал. Сообщение, сообщающее о последнем положении метки, может быть принято одним или несколькими радиомаяками 604. В интервале измерения расстояния метка 606 может выполнять измерение расстояния до радиомаяков 604 поблизости или которые находятся на линии прямой видимости с меткой 606. В одном варианте осуществления интервал измерения расстояния является глобальным временным интервалом длиной n измерений TWR на метку 606. Следом за регистрацией метки 606 в глобальном окне регистрации, становятся активны радиомаяки 604 для обнаружения измерений TWR метки в этом интервале. Измерения TWR в одном варианте осуществления происходят как опросы, включающие в себя измерение расстояния.
[0056] Пример 700 30-секундного времени цикла показан в графической форме на фиг. 5. Показана последовательность операции для различных временных интервалов и операций в пределах цикла 700. Цикл 700 начинается в момент времени 702 и заканчивается в момент времени 704. В момент времени 702 имеет место начало 706 кадра для регистрации меток. При регистрации меток метки 606 непрерывно ожидают в 708 сообщения синхронизации от радиомаяков 604. В одном варианте осуществления для синхронизации времени радиомаяка 604 доступно 200 временных интервалов. После приема сообщения синхронизации радиомаяка 604 в первый раз метка 606 посылает регистрационное сообщение в 710. Сообщение посылается случайным образом в одном временном интервале из выделенного числа временных интервалов (в одном варианте осуществления это 100 интервалов). После приема регистрационного сообщения радиомаяк 604 посылает подтверждающее сообщение метке 606 в 712. В одном варианте осуществления подтверждение радиомаяка регистрации метки происходит в 200 временных интервалах. Радиомаяки 604 начинают ожидать на интервалах отчеты о положении меток в 714 (в одном варианте осуществления временные интервалы отчета о положении меток организованы в блоки по 1000 и являются последовательными).
[0057] Измерения расстояния выполняются следующим образом. При измерении расстояния радиомаяк 604 всегда ждет на интервале 714 измерений зарегистрированных меток опроса зарегистрированной метки. Метка 606 может решить опросить относительно TWR конкретной радиомаяк 604 в течение этого времени. Эта метка 606 может опросить до n радиомаяков 604 в одном цикле 700.
[0058] В одном варианте осуществления выполняется компенсация дрейфа часов радиомаяка 604/метки 606 для уменьшения ошибки задержки ответа (Td). Как радиомаяк 604, так и метка 606 имеют систематический дрейф часов относительно часов сети. В одном варианте осуществления последовательность для калибровки и компенсации этого дрейф имеет следующий вид, используя пример, показанный на фиг. 6, и определяя Td между портативным блоком PU (таким как метка 606) и радиомаяком B (таким как радиомаяк 604). Радиомаяк B посылает свое значение внутреннего счетчика часов как часть сообщения 708 синхронизации ( в цикле n в пределах глобального окна 800. PU (например, метка 606) регистрирует свое значение внутреннего счетчика часов по приходу сообщения (
в цикле n в пределах глобального окна 800. PU (например, метка 606) регистрирует свое значение внутреннего счетчика часов по приходу сообщения ( синхронизации в цикле n. Метка 606 вычисляет поправочный коэффициент с использованием уравнения (4)
синхронизации в цикле n. Метка 606 вычисляет поправочный коэффициент с использованием уравнения (4)  . Этот поправочный коэффициент используется меткой 606 для корректировки временной задержки Td с использованием уравнения (5) TRT=2Tf+Td*D, которое заменяет уравнение (3). Скорректированная временная задержка компенсирует дрейф часов, позволяя лучше определять положение меток 606 в системе 600.
. Этот поправочный коэффициент используется меткой 606 для корректировки временной задержки Td с использованием уравнения (5) TRT=2Tf+Td*D, которое заменяет уравнение (3). Скорректированная временная задержка компенсирует дрейф часов, позволяя лучше определять положение меток 606 в системе 600.
[0059] Хотя настоящее раскрытие было описано со ссылкой на предпочтительные варианты осуществления, специалистам в области техники будет понятно, что в форме и деталях могут быть сделаны изменения, не отступая от сущности и объема раскрытия. Варианты осуществления настоящего раскрытия могут использоваться в закрытых помещениях, вне помещений или в гибридных средах. Связь может осуществляться в соответствии с любым стандартом и не ограничивается системой связи типа ячеистой сети. Термин «RF» относится к радиочастотам любой подходящей длины волны. В настоящем описании термин «привязка» относится к базовому передатчику, местоположение которого известно и используется в качестве опорного местоположения при определении местоположения. Термин «мобильное устройство» относится к устройству, такому как мобильная станция, местоположение которого определяется. Блок обработки, который используется для определения местоположения, может находиться в мобильной станции, в одной или нескольких из станций привязки, в центральной станции или в некотором другом месте.
[0060] В мобильной станции (такой как метка 606) может быть обеспечен и может использоваться опциональный модуль GPS, такой как модуль 504, показанный выше, когда доступен сигнал GPS. Протокол связи малой мощности (то есть 608), например, основанный на физическом уровне IEEE 802.15.4-2003, может использоваться в качестве основы для системы позиционирования, которая использует надежное определение расстояния, достигаемое путем использования UWB-протокола определения расстояния и связи с низким потреблением мощности, например, основанного на IEEE 802.15.4a-2011. Однако могут использоваться другие протоколы и методики определения расстояния и связи для реализации вариантов осуществления раскрытия. Конфигурация обеспечивает точное обнаружение местоположения с низким потреблением мощности, которое по существу устойчиво к ошибкам из-за многолучевого распространения. Новые методики разрешения конфликтов позволяют отслеживать местоположение многих тысяч меток. Обратная связь между радиомаяками и сервером предпочтительно использует технику связи с низким потреблением мощности, такую как WirelessHART®, ISA100, Zigbee® и Bluetooth® Low Energy, WAN на основе LORA® или другие.


Изобретение относится к средствам беспроводного определения местоположения объекта. Система (600) позиционирования на основе ультраширокополосного двухпроходного определения расстояния включает в себя множество активных меток (606), каждая из которых имеет положение, и множество радиомаяков (604), выполненных с возможностью определения положения метки (606) из множества активных меток. Активные метки (606) и радиомаяки (604) непрерывно синхронизируются с общим временным базисом. 2 н. и 20 з.п. ф-лы, 6 ил.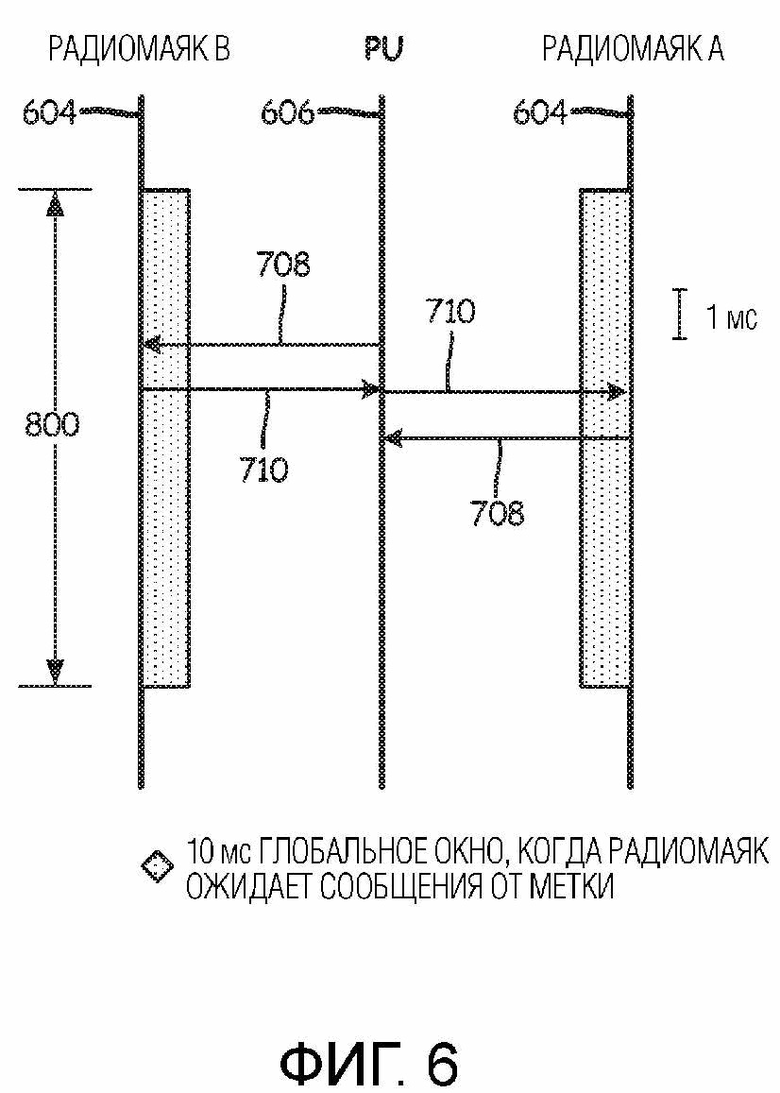
1. Система позиционирования на основе ультраширокополосного двухпроходного определения расстояния, содержащая:
множество активных меток, каждая из которых имеет положение; и
множество радиомаяков с фиксированным положением, выполненных с возможностью определения положения метки из множества активных меток с использованием двухпроходного определения расстояния по сети ультраширокополосной связи; и
блок обработки, соединенный посредством сети данных, отделенной от сети ультраширокополосной связи, с множеством радиомаяков, причем радиомаяки сконфигурированы для приема положения метки из множества активных меток по сети ультраширокополосной связи, и при этом блок обработки сконфигурирован для приема информации положения множества активных меток из множества радиомаяков по сети данных;
при этом множество активных меток и множество радиомаяков непрерывно синхронизируется с общим временным базисом.
2. Система позиционирования по п. 1, в которой каждая активная метка в системе имеет глобально назначенное окно для двухпроходных опросов для определения расстояния между ней и по меньшей мере одним из множества радиомаяков.
3. Система позиционирования по п. 1, в которой каждый радиомаяк из множества радиомаяков ожидает опроса двухпроходного определения расстояния от метки из множества активных меток в заранее заданном окне.
4. Система позиционирования по п. 1, в которой множество активных меток имеет глобальный временной интервал отчета.
5. Система позиционирования по п. 1, в которой каждая метка из множества активных меток выполнена с возможностью определения своего положения на основании двухпроходного определения расстояния между ней и по меньшей мере одним радиомаяком из множества радиомаяков или в которой каждая метка из множества меток выполнена с возможностью определения своего положения на основании двухпроходного определения расстояния между ней и по меньшей мере тремя радиомаяками.
6. Система позиционирования по п. 1, в которой блок обработки дополнительно выполнен с возможностью обновления положения множества меток с частотой, зависящей от определенных условий меток.
7. Система позиционирования по п. 1, дополнительно содержащая сервер приложений и множество радиомаяков с фиксированными местоположениями, содержащий этапы, на которых:
обеспечивают общий временной базис для множества радиомаяков с фиксированными местоположениями;
обеспечивают сообщение синхронизации от каждого из множества радиомаяков с фиксированными местоположениями;
регистрируют активную метку в общем временном базисе на основании сообщения синхронизации;
определяют расстояние от активной метки по меньшей мере до части из множества радиомаяков и
сообщают о положении активной метки по меньшей мере одному радиомаяку из множества радиомаяков.
8. Система позиционирования по п. 7, в которой сервер приложений дополнительно сконфигурирован для компенсации дрейфа множества радиомаяков и активной метки с использованием значения внутреннего счетчика  часов сообщения синхронизации радиомаяка и значения внутреннего счетчика
часов сообщения синхронизации радиомаяка и значения внутреннего счетчика  часов активной метки для текущего цикла n обновления системы.
часов активной метки для текущего цикла n обновления системы.
9. Система позиционирования по п. 8, в которой сервер приложений дополнительно сконфигурирован для компенсации дрейфа, посредством:
определения поправочного коэффициента D для корректировки дрейфа часов относительно общего временного базиса.
10. Система позиционирования по п. 9, в которой сервер приложений дополнительно сконфигурирован для определения поправочного коэффициента с использованием формулы 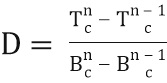 .
.
11. Система позиционирования по п. 10, в которой временем прохождения между радиомаяком и активной меткой является Tf, в котором задержкой ответа между радиомаяком и активной меткой является Td и в котором поправочный коэффициент применяется к двухпроходному времени прохождения в обе стороны для определения расстояния следующим образом: TRT=2Tf+Td*D.
12. Система позиционирования по п. 11, в которой сервер приложений дополнительно сконфигурирован, для регистрации активной метки, посредством
ожидания активной меткой сообщения синхронизации от множества радиомаяков;
отправки регистрационного сообщения при получении сообщения синхронизации от радиомаяка из множества радиомаяков;
приема меткой подтверждающего сообщения от радиомаяка из множества радиомаяков и
инициации ожидания отчета о положении метки во временном интервале отчета о положении метки.
13. Система позиционирования по п. 7, в которой сервер приложений дополнительно сконфигурирован, для обеспечения сообщения синхронизации, в пределах диапазона предварительно определенных временных интервалов синхронизации времени радиомаяков в цикле обновления для системы.
14. Система позиционирования по п. 7, в которой сервер приложений дополнительно сконфигурирован для регистрации активной метки в пределах диапазона предварительно определенных временных интервалов регистрации метки в цикле обновления для системы.
15. Система позиционирования по п. 7, в которой сервер приложений дополнительно сконфигурирован для определения расстояния от активной метки в пределах диапазона временных интервалов в цикле обновления после временных интервалов регистрации метки.
16. Система позиционирования по п. 15, в которой сервер приложений дополнительно сконфигурирован, для определения расстояния от активной метки, посредством
передачи от активной метки двухпроходного сигнала определения расстояния;
приема в активной метке обратного сигнала по меньшей мере от трех радиомаяков из множества радиомаяков и
вычисления положения активной метки в активной метке с использованием общего временного базиса и принятых обратных сигналов.
17. Система позиционирования по п. 16, в которой сервер приложений дополнительно сконфигурирован для передачи двухпроходного сигнала определения расстояния определенному радиомаяку из множества радиомаяков.
18. Система позиционирования по п. 17, в которой сервер приложений дополнительно сконфигурирован для определения расстояние до более чем одного радиомаяка из множества радиомаяков в пределах цикла обновления системы.
19. Система позиционирования по п. 16, в которой сервер приложений дополнительно сконфигурирован для передачи двухпроходных сигналов определения расстояния в пределах глобально назначенного окна в цикле обновления системы.
20. Система позиционирования по п. 7, в которой сервер приложений дополнительно сконфигурирован для соединения множества радиомаяков и сервера приложений с сетью беспроводной связи и
передачи информации о мобильных метках от множества радиомаяков серверу приложений.
21. Система позиционирования по п. 7, в которой система отслеживает множество меток, дополнительно содержащая этап, на котором обновляют информацию по меньшей мере для одной метки из множества меток с меньшей частотой, чем для других меток, в зависимости от определенных условий этой по меньшей мере одной метки.
22. Система позиционирования, содержащая:
множество активных меток;
множество радиомаяков с фиксированными положениями, осуществляющих связь с множеством активных меток по сети на основе ультраширокополосного двухпроходного определения расстояния;
при этом каждая активная метка из множества активных меток в системе имеет глобально назначенное окно для опросов двухпроходного определения расстояния между ней и по меньшей мере одним из множества радиомаяков, при этом множество радиомаяков принимает опросы двухпроходного определения расстояния в пределах глобально назначенного окна и при этом множество активных меток сообщает о положениях в пределах глобального интервала времени отчета по сети на основе ультраширокополосного двухпроходного определения расстояния;
блок обработки, соединенный посредством сети данных, отделенной от сети ультраширокополосной связи, с множеством радиомаяков, причем радиомаяки сконфигурированы для приема положения метки, и при этом блок обработки сконфигурирован для приема информации положения множества активных меток из множества радиомаяков по сети данных.
| US 6492906 B1, 10.12.2002 | |||
| US 2007162185 A1, 12.07.2007 | |||
| EP 1992964 A2, 19.11.2008 | |||
| US 2011110242 A1, 12.05.2011 | |||
| RU 2011120814 A, 27.11.2012. |

