ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к области медицинского мониторинга и лечения, области беспроводного мониторинга пациента и связанным областям.
УРОВЕНЬ ТЕХНИКИ
Мобильные устройства для мониторинга пациента (носимые или другие) обеспечивают для пациентов большую мобильность. Это может улучшить качество ухода, а также улучшить результаты лечения пациентов. Для обеспечения возможности мониторинга получаемых данных о показателях жизненно важных функций на посту медсестры или т.п., мобильное устройство для мониторинга пациента содержит радиосистему, обеспечивающую беспроводную связь. С целью обеспечения продолжительного срока службы батареи, радиосистема, предпочтительно, представляет собой радиосистему ближнего действия, которая, для обеспечения большей области покрытия, сообщается с беспроводной сетью, которая, как правило, содержит точки доступа (ТД), распределенные таким образом, чтобы обеспечить полное покрытие этажа больницы или множества этажей больницы. Например, беспроводная сеть может представлять собой сеть WiFi, соответствующую стандартам беспроводной связи IEEE 802.11. Когда мобильное устройство для мониторинга пациента соединено с беспроводной сетью, оно связывается с ТД в пределах сети. По мере движения пациента по области покрытия беспроводной сети, связь устройства для медицинского мониторинга с ТД может стать слабой вследствие:
(1) расстояния между ТД и устройством;
(2) радиочастотных (РЧ) помех между ТД и устройством;
(3) препятствий между ТД и устройством (таких как крупные металлические объекты, стены или другое).
Когда уровень сигнала становится слишком низким, мобильное устройство для мониторинга пациента переводится или «переходит» (осуществляет "роуминг", roam) к доступной ТД более высокой мощности (которая, как правило, находится ближе к мобильному устройству для мониторинга пациента, и/или путь от которой к мобильному устройству для мониторинга пациента имеет меньше препятствий). Для идентификации доступных ТД, радиосистема дополнительно выполнена с возможностью сканирования на предмет доступных ТД и сохранения таблицы ТД, в которой перечислены доступные ТД.
В целом, для воздействия на поведение перехода могут быть сконфигурированы два пороговых значения радиосистемы, содержащейся в мобильном устройстве для мониторинга пациента. Первое пороговое значение представляет собой пороговое значение низкой мощности сигнала для сканирования. Когда мощность сигнала ТД опускается ниже этого порогового значения, мобильное устройство для мониторинга пациента начнет сканирование окружающего пространства на предмет доступных ТД. Таким образом обеспечивается актуальность записей в таблице ТД для вероятного перехода. Второе пороговое значение представляет собой пороговое значение низкой мощности сигнала для перехода. Когда мощность сигнала опускается ниже данного значения, устройство для медицинского мониторинга предпринимает попытку перехода к другой доступной ТД большей мощности.
Пороговое значение для сканирования используют для запуска сканирования с целью обновления таблицы ТД, идентифицирующей доступные ТД по мощности сигнала и, возможно, другим факторам, таким как отношение сигнал/шум (ОСШ). Пороговое значение для перехода является ниже порогового значения для сканирования, и пороговое значение для перехода запускает фактическое переключение (т.е. переход) на новую ТД. Исполнение с двумя пороговыми значениями уменьшает приводную мощность радиоаппарата, поскольку сканирование для определения ТД потребляет значительную мощность.
Далее раскрыты новые и улучшенные системы и способы, которые решают вышеупомянутые и другие проблемы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном раскрытом аспекте мобильное устройство для мониторинга пациента содержит радиосистему, которая имеет пороговое значение для сканирования и пороговое значение для перехода, которое ниже порогового значения для сканирования. Радиосистема выполнена с возможностью:
сканирования для идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения для сканирования или равна ему, но выше порогового значения для перехода; и
перехода к доступной точке доступа, когда мощность текущей точки доступа находится ниже порогового значения для перехода.
Трехмерный акселерометр выполнен с возможностью измерения ускорения. К электронным компонентам устройства относится по меньшей мере один процессор, запрограммированный на:
прием данных о показателях жизненно важных функций по меньшей мере от одного соответствующего физиологического датчика;
классифицирование движения пациента на основе ускорения, измеренного 3D-акселерометром; и
присваивание или вычисление пороговых значений для сканирования и перехода для радиосистемы по меньшей мере на основе классификации движения пациента.
В другом раскрытом аспекте мобильное устройство для мониторинга пациента содержит радиосистему, которая имеет пороговое значение для сканирования и пороговое значение для перехода, которое ниже порогового значения для сканирования. Радиосистема выполнена с возможностью:
сканирования для идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения для сканирования или равна ему, но выше порогового значения для перехода; и
перехода к доступной точке доступа, когда мощность текущей точки доступа находится ниже порогового значения для перехода.
К электронным компонентам относится по меньшей мере один процессор, который запрограммирован на:
прием данных о показателях жизненно важных функций по меньшей мере от одного соответствующего физиологического датчика; и
присваивание или вычисление пороговых значений для сканирования и перехода для радиосистемы по меньшей мере на основе принятых данных о показателях жизненно важных функций.
В другом раскрытом аспекте представлен некратковременный носитель для хранения данных, хранящий инструкции, считываемые и исполняемые одним или более микропроцессорами для выполнения операций, включающих:
прием полученных данных о показателях жизненно важных функций; управление радиосистемой для сканирования с целью идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения или равна ему, но выше порогового значения для перехода;
управление радиосистемой для перехода к доступной точке доступа, когда мощность текущей точки доступа находится ниже порогового значения перехода;
классифицирование движения пациента по меньшей мере по одному из следующего: наборов данных ускорения, принятых от 3D-акселерометра, и по мощности точки доступа, определенной радиосистемой; и
присваивание пороговых значений для сканирования и перехода для радиосистеме на основе классификации движения пациента.
Одно преимущество заключается в обеспечении непрерывности соединения устройства для медицинского мониторинга с сетью через точку доступа.
Еще одно преимущество заключается в улучшенной гладкости перехода между соединениями с точками доступа.
Еще одно преимущество заключается в увеличенном сроке службы батареи в устройстве для медицинского мониторинга в то время, когда пациент неподвижен или находится на койке.
Еще одно преимущество заключается в улучшенной производительности и реагировании для перехода, если пациент, мониторинг которого выполняет мобильное медицинское устройство, упал или испытывает ухудшение физиологического состояния.
Представленный вариант реализации может обеспечивать одно, два, более или все из указанных выше преимуществ, или же не обеспечивать их вовсе, и/или может обеспечивать другие преимущества, которые станут очевидны специалисту в данной области техники после прочтения и понимания настоящего раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение может принимать форму различных компонентов и схем размещения компонентов, а также различных этапов и порядков выполнения этапов. Чертежи предназначены лишь для иллюстрации предпочтительных вариантов реализации и их не следует рассматривать в качестве ограничений настоящего изобретения.
На фиг. 1 изображено мобильное устройство для мониторинга пациента (вставка А), а на основном чертеже схематически изображено мобильное устройство для мониторинга пациента, описанное в настоящем документе, содержащее схематически изображенные внутренние компоненты, такие как электронные компоненты устройства и радиосистема устройства.
Фиг. 2 представляет собой блок-схему, на которой показан пример способа использования устройства, изображенного на фиг. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Существенные факторы, которые необходимо учитывать в мобильных устройствах для беспроводного мониторинга пациента, включают срок службы батареи, гладкость перехода между точками доступа (ТД) по мере движения пациента от области одной точки доступа к следующей, а также надежность связи в пределах беспроводной системы. Настоящее изобретение направлено на улучшение, которое применимо ко всем этим факторам, а именно - на улучшение пороговых значений для сканирования и перехода на основе движения или состояния пациента.
Замысел, лежащий в основе использования пороговых значений для сканирования и перехода, заключается в запуске сканирования ТД только тогда, когда мощность сигнала текущей ТД уменьшается, так что увеличивается вероятность выхода за пределы порогового значения для перехода. Эти пороговые значения для сканирования и перехода, как правило, устанавливают на предприятии, а не конфигурируются пользователем, однако пороговые значения и разделяющее их расстояние не влияют на срок службы батареи и время работы вследствие дополнительной мощности, требуемой портативной радиосистемой для сканирования альтернативных ТД.
Мобильное устройство для мониторинга пациента предпринимает попытку перехода к ТД с улучшенной мощностью сигнала и меньшим количеством помех. Для готовности к выполнению перехода в любое время, устройство для медицинского мониторинга сохраняет перечень потенциальных ТД для перехода в таблице перехода. Как правило, мобильное устройство для мониторинга пациента переходит к ТД из таблицы перехода с наивысшей мощностью сигнала. Мобильное устройство для мониторинга пациента выполняет постоянное сканирование окружающей среды для того, чтобы убедиться в том, что ТД и их мощности сигнала являются актуальными.
Пороговое значение для сканирования и пороговое значение для перехода, как правило, заранее программируют на фазе разработки мобильного устройства для мониторинга пациента, например, на предприятии. В некоторых вариантах разработки, пороговые значения для сканирования и перехода могут быть сконфигурированы на месте, например, настройка устройства может быть выполнена медицинским работником перед его использованием. Независимо от настройки на предприятии или настройки медицинским работником на месте, это означает, что два пороговых значения остаются постоянными в течение всего рабочего цикла устройства.
В улучшениях, описанных в настоящем документе, пороговые значения сканирования и перехода автоматически обновляются для отражения состояний окружающей среды, таких как паттерн движения пациента. Предусмотрен контур обратной связи, так что пороговые значения для сканирования и перехода адаптированы к движению пациента. Таким образом, срок службы батареи мобильного устройства для мониторинга пациента увеличивается путем сокращения избыточного сканирования ТД, при этом роуминговые переходы проходят более гладко, а отказы происходят реже.
В вариантах реализации, описанных в настоящем документе, пороговые значения для сканирования и перехода устанавливают на основе классификации движения пациента. В качестве иллюстрации, если движение классифицируют, как «езда на медицинской тележке», диапазоны пороговых значений устанавливают высокими, так что события сканирования и перехода к ТД запускают как можно скорее (т.е. при более высокой мощности сигнала ТД). Это обеспечивает быстрый переход, который подходит для пациента, передвигающегося на кресле-каталке по коридорам больницы и который, вероятно, передвигается между зонами ТД. Эта быстрота достигается за счет более высокой передаваемой мощности, однако это является благоприятным компромиссом вследствие высокой скорости движения пациента. С другой стороны, если движение классифицируют, как «покой», например, в койке или на стуле, то диапазоны пороговых значений могут быть установлены низкими, поскольку вероятность события перехода низка. Во всех случаях пороговое значение для сканирования устанавливают выше порогового значения для перехода, так что по мере снижения мощности текущей ТД, радиоаппарат выполняет сканирование для обновления таблицы ТД и затем, если она продолжает снижаться и опускается ниже нижнего порогового значения для перехода, таблица ТД для осуществления перехода является актуальной. В некоторых случаях изменением между пороговым значением для сканирования и пороговым значением для перехода можно манипулировать. Например, поскольку повторная конфигурация пороговых значений для сканирования и перехода происходит динамически, относительное изменение между пороговыми значениями для сканирования и перехода также варьируется.
В некоторых вариантах реализации, описанных в настоящем документе, в дополнение к движению пациента, пороговые значения для сканирования и перехода также устанавливаются на основе клинической классификации. В данных вариантах реализации, если показатели жизненно важных функций пациента (мониторинг которых уже выполняет мобильное устройство для мониторинга пациента) находятся в диапазонах нормальных значений, то задержанное событие перехода с малой долей вероятности приведет к потере важных данных или предотвратит передачу важного сигнала тревоги, и, таким образом, диапазоны пороговых значений могут быть установлены низкими для экономии энергии. С другой стороны, если показатель жизненно важной функции считывается ненормальным образом, могут быть приемлемыми более высокие пороговые значения для увеличения надежности преобразования формы волны и выдачи сигналов тревоги.
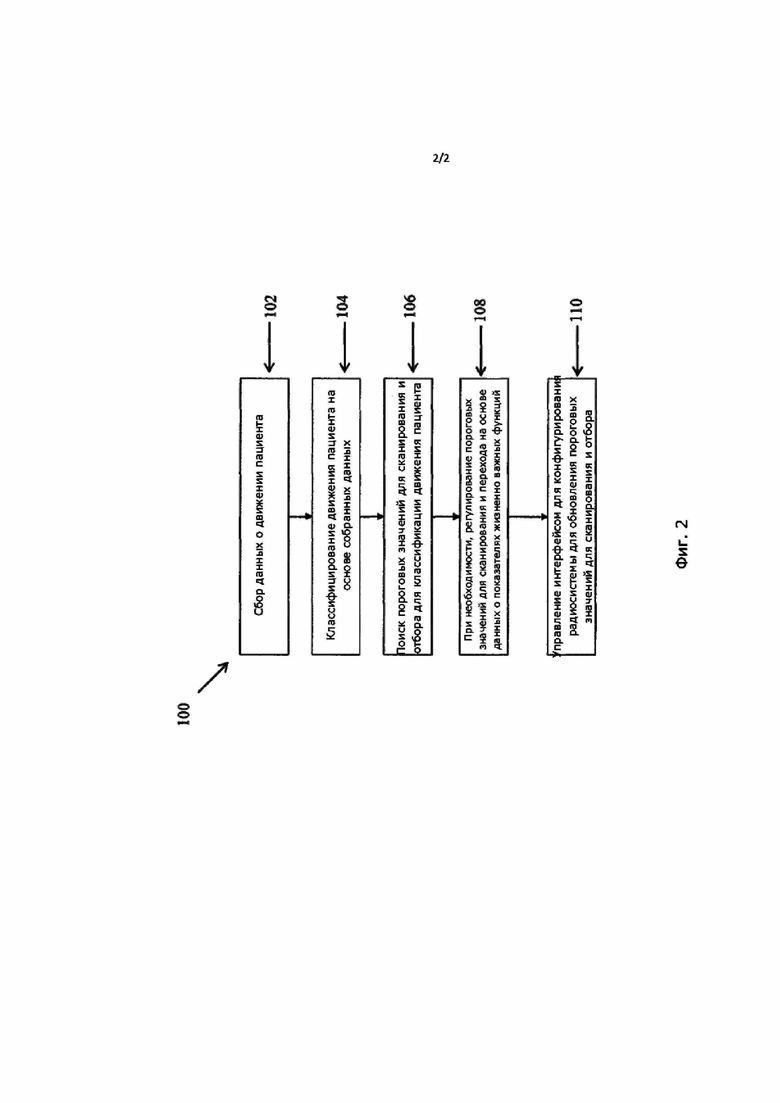
Ссылаясь на фиг. 1, показан иллюстративный вариант реализации мобильного устройства 10 для мониторинга пациента. Начиная со вставки А, мобильное устройство 10 для мониторинга пациента содержит корпус 2, при необходимости, со встроенным дисплеем 4 для отображения линий тренда текущих показателей жизненно важных функций, индикаторов состояния устройства или подобного. Предусмотрен порт 6 для датчиков, через который может быть функционально подсоединен один или более физиологических датчиков. Устройство 10 для мониторинга пациента может представлять собой, например, монитор амбулаторного пациента под названием «Philips Intellivue™ MX40», доступный от компании «Koninklijke Philips N.V.», Эйндховен, Нидерланды, или может представлять собой другое коммерческое или специально разработанное устройство для мониторинга пациента. Устройство 10 для мониторинга пациента является мобильным, так что оно продолжает выполнять мониторинг пациента от одного местоположения (т.е. больничной палаты пациента) до другого местоположения (т.е. процедурной комнаты). Например, устройство «Philips Intellivue™ MX40» разработано для размещения в сумке, которую носит пациент, или на спинке кресла-каталки или подобным образом.
На основном чертежей на фиг. 1 схематически изображены внутренние компоненты мобильного устройства 10 для мониторинга пациента, изображенного на вставке А, вместе с иллюстративными физиологическими датчиками, которые могут быть размещены внутри корпуса 2 устройства или функционально соединены с устройством 10 через порт 6 для датчиков. Устройство 10 для мониторинга пациента выполнено с возможностью пребывания в постоянной беспроводной связи с соответствующей точкой доступа (ТД) для обеспечения линии надежной, постоянной электронной связи. В одном примере ТД может находиться в палате пациента или, в качестве альтернативы, она может находиться за пределами палаты пациента на приемлемом расстоянии для поддержания соединения с устройством 10 для мониторинга пациента. Несмотря на то, что показана одна иллюстративная ТД, больничная беспроводная сеть, как правило, содержит ряд ТД, которые стратегически распределены по этажу больницы или множеству этажей больницы для обеспечения полной области покрытия (по меньшей мере) тех областей, которые амбулаторный пациент наиболее вероятно посетит. При необходимости, ТД могут находиться так, чтобы также обеспечить покрытие на некотором расстоянии за пределами больницы.
Как показано на фиг. 1, устройство для мониторинга пациента содержит трехмерный (3D) акселерометр 12, радиосистему 14 и электронные компоненты 16 устройства. Следует понимать, что акселерометр 12, радиосистема 14 и электронные компоненты 16 устройства могут быть сформированы в виде отдельных блоков или в виде одного целого блока устройства 10 для мониторинга пациента. В некоторых вариантах реализации радиосистема 14 представляет собой радиосистему, совместимую со стандартом IEEE 802.11, хотя также предполагаются и другие типы радиосистем, выполненных с возможностью перехода. Следует понимать, что переход также может включать в себя соты 4G/LTE между вышками или микросоты в здании (т.е. ТД могут быть не вовлечены), BlueTooth Low Energy® (технология Bluetooth с низким потреблением энергии), сотовая сеть Zigbee, N число узлов и тому подобное. Радиосистема 14 и электронные компоненты 16 устройства, как правило, заключены внутри корпуса 2 устройства, тогда как 3D-акселерометр 12 может представлять собой единый компонент, заключенный внутри корпуса 2, или внешний акселерометр, функционально соединенный с портом 6 для датчиков. Если акселерометр 12 расположен внутри корпуса 2 устройства, то он выполнен с возможностью измерения ускорения (т.е. вдоль ортогональных направлений, обозначенных, без нарушения общности, как направления оси x, оси y и оси z) устройства 10 для мониторинга пациента, и, таким образом, встроенный акселерометр измеряет движение пациента, носящего устройство 10 для мониторинга пациента. В качестве альтернативы, если акселерометр 12 представляет собой отдельный компонент, соединенный по электрическому кабелю с портом 6 для датчика, то акселерометр подходящим образом непосредственно прикреплен к пациенту и, таким образом, измеряет движение пациента. Акселерометр 12 может представлять собой любой коммерчески доступный акселерометр (т.е. акселерометр ADXL362, доступный от компании «Analog Devices Inc.», Норвуд, штат Массачусетс). Акселерометр 12 может быть прикреплен к любой подходящей части тела пациента (например, груди, предплечье, ноге и тому подобное) или заключен внутри корпуса 2 устройства. Акселерометр 12 непрерывно измеряет ускорение пациента, например, когда он все время находится на кровати, все время находится в кресле, при передвижении на кресле-каталке, при передвижении на медицинской тележке, при дыхательном движении и тому подобном, и передает данные об этом передвижении на электронные компоненты 16 устройства. Следует понимать, что вместо акселерометра может быть использовано любое подходящее микроскопическое электромеханическое устройство (от англ. - «Micro-Electro-Mechanical System», MEMS), такое как гироскоп, барометрический датчик движения и тому подобное.
Радиосистема 14 выполнена с возможностью осуществления мониторинга и сохранения соединения между устройством 10 для мониторинга пациента и ТД по сети 18 (например, сети беспроводной связи, локальной вычислительной сети, глобальной вычислительной сети, персональной сети, сети Интернет, сети интранет, собственное ITS-решение компании «Philips», беспроводной сети стандарта IEEE 802.11 от поставщика и тому подобное). Радиосистема 14 выполнена с возможностью осуществления мониторинга и поддержания соединения между устройством 10 для мониторинга пациента и ТД. Для осуществления этого, радиосистема 14 содержит интерфейс 20 конфигурирования радиосистемы, который хранит заранее определенное пороговое значение для сканирования (показанное на фиг. 1 как Tсканирования) и заранее определенное пороговое значение для перехода (показанное на фиг. 1 как Tотбора), которое меньше порогового значения для сканирования или равно ему. Радиосистема 14 выполнена с возможностью сканирования доступных ТД, когда мощность текущей ТД находится ниже порогового значения для сканирования, но выше порогового значения для перехода. Пока надежность соединения (т.е. мощность точки доступа, например, измеренная с использованием децибел на милливатт, дБм в иллюстративных примерах в настоящем документе) между устройством 10 для мониторинга пациента и ТД находится выше порогового значения для перехода, соединение между ними поддерживается и не разрывается. Когда мощность ТД находится ниже порогового значения для сканирования, радиосистема 14 выполняет сканирование на предмет всех доступных ТД в пределах сети (такой как больничная IP-сеть). Отсканированные ТД сохраняют в таблице 22 ТД в интерфейсе 20 для конфигурирования радиосистемы. После этого, такое сканирование можно повторить через заранее определенные интервалы времени, пока мощность ТД остается ниже порогового значения для сканирования. С другой стороны, если мощность ТД понижается сильнее и попадает ниже порогового значения для перехода, то радиосистема 14 переключается на другую доступную ТД, как обозначено в таблице ТД.
В некоторых вариантах реализации электронные компоненты 16 устройства содержат селектор 24 порогового значения, который запрограммирован на определение уровня каждого из порогового значения для сканирования и порогового значения для перехода. Предпочтительно, эти пороговые значения выбирают в пределах некоторого диапазона, например, заранее определенный диапазон пороговых значений для перехода может быть от -64 дБм до -75 дБм включительно, а заранее определенное пороговое значение для сканирования может быть от -50 дБм до -65 дБм включительно. Пороговые значения для сканирования и перехода для каждой классификации движения пациента могут быть сохранены в справочной таблице 26, например, хранящейся в стираемом программируемом постоянном запоминающем устройстве (СППЗУ) или другой памяти электронных компонентов 16 устройства. Пороговые значения для сканирования и перехода изначально могут быть установлены на значения по умолчанию, которые передают на интерфейс 20 для конфигурирования радиосистемы и сохраняют в нем. Если уровни пороговых значений для сканирования и перехода должны быть отрегулированы на основе движения пациента или других факторов окружающей среды (как описано более подробно ниже), селектор 24 порогового значения извлекает обновленные пороговые значения для сканирования и перехода из справочной таблицы 26 и регулирует пороговые значения радиосистемы 14 соответствующим образом.
Каждое из пороговых значений для сканирования и перехода может быть установлено (например, пользователем, изготовителем и т.п.) на любое подходящее значение. В одном примере пороговое значение для сканирования составляет -50 дБм, а пороговое значение для перехода составляет -64 дБм. Если надежность соединения снижается до -57 дБм, которое ниже порогового значения для сканирования, то радиосистема 14 сканирует окружающую среду для обнаружения доступных ТД и для подсчета количества доступных ТД по мощности ТД и, при необходимости, другой метрике, такой как отношение сигнал/шум (ОСШ), и таблицу ТД обновляют соответствующим образом. Следует отметить, что в данной точке надежность соединения не попала ниже порогового значения для перехода, составляющего -64 дБм, так что радиосистема 14 остается соединенной с текущей ТД. Надежность соединения может попасть ниже порогового значения для сканирования по многочисленным причинам, в том числе вследствие радиочастотных помех, препятствия между мобильным устройством для мониторинга пациента и связанной точкой доступа, а также увеличение расстояния между радиосистемой и ТД вследствие движения пациента.
Если надежность соединения между радиосистемой 14 и ТД продолжает падать до попадания ниже порогового значения для перехода, составляющего -64 дБм (в данном примере), то радиосистема 14 выполнена с возможностью перехода к другой доступной ТД, которая идентифицирована из таблицы 22 ТД. Как правило, интерфейс 20 для конфигурирования радиосистемы отбирает ТД из таблицы ТД, перечисленную как имеющую наивысшую мощность соединения (т.е. ТД с наибольшей мощностью), хотя могут быть учтены другие факторы, такие как ССШ. Кроме того, если выбранная сначала ТД недоступна (например, перегружена связью с другими устройствами), то выбирают следующую наилучшую ТД из таблицы ТД.
Селектор 24 порогового значения запрограммирован на регулировку пороговых значений для сканирования и пороговых значений для перехода на основе факторов окружающей среды, таких как движение пациента, измеренное акселерометром 12. В одном примере селектор 24 порогового значения запрограммирован на регулирование уровня порогового значения для сканирования и/или перехода на основе типа движения пациента. С этой целью, электронные компоненты 16 устройства содержат классификатор 28 движения, предназначенный для классифицирования типов движения пациента. Классификатор 28 движения принимает данные об ускорении от акселерометра 12 и определяет класс текущего движения пациента из данных об ускорении. Например, если пациент все время находится на кровати или в кресле, ускорение является по существу постоянным в зависимости от времени и, как правило, равняется ускорению свободного падения. Если пациент передвигается в кресле-каталке, ускорение будет иметь некоторую вариабельность в зависимости от времени вследствие ускорения кресла-каталки и замедления, поскольку колеса прокручивает пациент. Если пациент лежит на медицинской тележке, передвигаемой персоналом больницы по коридорам больницы, данные акселерометра, вероятно, будут часто меняться в зависимости от времени, медицинская тележка замедляется для соблюдения размеренного движения, ускоряется, когда проход свободен, и выполняет повороты на углах. На основе измеренного ускорения в зависимости от времени, классификатор 28 движения классифицирует движение пациента соответствующим образом, например, значение «1» - для движения пациента, который все время находится на кровати, значение «2» для движения пациента, который все время находится в кресле, значение «3» для движения пациента на кресле-каталке и так далее).
Классификатор 29 движения передает классификацию движений пациента на селектор 24 порогового значения. Из данной классификации движения пациента, селектор 24 порогового значения запрограммирован на обновления пороговых значений для сканирования и перехода радиосистеме 14 на основе классификации движения пациента. В некоторых вариантах реализации селектор 24 порогового значения запрограммирован на присваивание или вычисление наибольших пороговых значений для сканирования и перехода для классификаций движения пациента, соответствующих быстрому движению пациента, и на присваивание или вычисление наименьших пороговых значений для сканирования и перехода для классификаций движений пациента, соответствующих классификациям состояний покоя пациента. При осуществлении этого, радиосистема 14 может иметь более сильные пороговые значения для сканирования и перехода во время быстрых движений (т.е. когда пациент передвигается на кресле-каталке или медицинской тележке и, таким образом, проходит мимо множества потенциальных ТД) и более слабое пороговое значение для сканирования и перехода во время медленных передвижений (т.е. во время движений в процессе лежания или дыхания, предположительно, когда пациент находится в одной и той же палате или передвигается в соседнюю палату). В таблице 1 показан пример подходящего варианта реализации справочной таблицы 26, используемой селектором 24 порогового значения, где в первом столбце («Движение») представлена классификация движения пациента, определенная классификатором 28 движения. (Последний столбец «Примечания» предназначен для информативных целей и, как правило, не предназначен для включения в кодированную справочную таблицу 26). Следует понимать, что диапазон пороговых значений для сканирования и пороговых значений для перехода, перечисленных в таблице 1, приведен лишь в целях иллюстрации. Пороговые значения для сканирования и перехода могут быть установлены (например, пользователем, изготовителем и т.п.) на любой подходящий уровень.
Таблица 1
Например, если классификация движения пациента представляет собой «передвижение на кресле-каталке» (относительно быстрое передвижение), селектор 24 порогового значения присваивает высокое значение -50 дБм для порогового значения для сканирования и высокое значение -64 дБм для порогового значения для перехода. И наоборот, когда классификация движения пациента представляет собой «движение в кровати» (медленное движение или отсутствие движения), селектор 24 порогового значения присваивает низкое значение -65 дБм для порогового значения для сканирования и низкое значение -75 дБм для порогового значения для перехода. Предпочтительно, присваивание или вычисление пороговых значений для сканирования или перехода на основе классификации движения пациента (1) увеличивает срок службы батареи устройства за счет сокращения избыточного сканирования и перехода с низкой мощностью сигнала; и (2) обеспечивает возможность более гладких и более быстрых переходов с более низкой частотой отказов.
В нормальном режиме работы, мобильное устройство 10 для мониторинга пациента соединено по меньшей мере с одним физиологическим датчиком 32 (например, датчиком частоты сердечных сокращений, датчиком дыхания и тому подобным) через порт 6 для датчиков для приема данных о показателях жизненно важных функций для пациента. В качестве альтернативы, физиологический датчик 32 может быть функционально соединен с устройством 10 по беспроводному соединению с малым радиусом действия, такому как Bluetooth, или он может быть встроен непосредственно в устройство 10 или электронные компоненты 16 устройства. Физиологический датчик 32 выполнен с возможностью получения данных о показателях жизненно важных функций (например, частоте сердечных сокращений, частоте дыхания и тому подобном). Эти данные передают от физиологического датчика 32 на дискретизатор датчика и процессор 34 электронных компонентов 16 устройства. При необходимости, дискретизатор и процессор 34 датчика выполняет обработку сигнала на данных (например, фильтрацию, нормализацию и тому подобное), после чего передает эти данные в хранилище 36 данных датчика в электронных компонентах 16 устройства и/или передает данные на пост медсестры или другое внешнее устройство по беспроводной связи посредством радиосистемы 14.
В некоторых вариантах реализации к хранилищу 36 данных датчика получает доступ селектор 24 порогового значения, который использует данные датчика, информацию о состоянии пациента и/или информацию о состоянии сигнала тревоги для оценки важности беспроводного соединения с постом медсестры или другим внешним устройством для приема данных о показателях жизненно важных функций. Кроме того, селектор 24 порогового значения запрограммирован на присваивание или вычисление пороговых значений для сканирования и перехода на основе полученных данных о показателях жизненно важных функций, предпочтительно, путем выбора более высоких пороговых значений для сканирования или перехода, если данные о показателях жизненно важных функций с точки зрения физиологии являются ненормальными, ошибочными или иным образом указывают на раннюю стадию нарушения состояния здоровья. Например, если частота дыхания снижается и состояние тревоги указано в хранилище 36 данных датчика, это является информацией, которая представляет собой высокую важность для передачи на пост медсестры; следовательно, селектор 24 порогового значения увеличивает пороговые значения для сканирования и перехода соответствующим образом, как описано выше. То есть в данных вариантах реализации селектор 24 порогового значения запрограммирован на увеличение пороговых значений для сканирования и перехода в ответ на ненормальные данные о показателях жизненно важных функций. Кроме того, селектор 24 порогового значения может быть запрограммирован на снижение пороговых значений для сканирования и перехода в ответ на физиологически нормальные или стабильные принятые данные о показателях жизненно важных функций. Например, когда частота дыхания является нормальной на протяжении продолжительного периода времени (например, одного часа, двух часов, трех часов и тому подобного), то состояние пациента считают стабильным. Следовательно, селектор 24 порогового значения снижает пороговые значения для сканирования и перехода соответствующим образом, как описано выше, так что пациент в стабильном состоянии имеет наименьшие пороговые значения для сканирования и перехода для классификаций движения пациента, соответствующих классификациям покоя пациента, тем самым обеспечивая пациентам, состояние которых не считают стабильным, возможность иметь увеличенные пороговые значения для сканирования и перехода.
В иллюстративном варианте реализации данные об ускорении от акселерометра 12 используются классификатором 28 движения для классификации движения пациента. Во многих случаях ускорение является эффективным для этой цели. Ожидается, что различные типы движения дают вариации характеристик ускорение/время, и они могут быть классифицированы с использованием подходящих обучающих данных. С целью обучения классификатора(ов) движения пациента собирают данные об ускорении для пациентов, передвигающихся на медицинских тележках, пациентов, передвигающихся на креслах-каталках, пациентов, которые все время находятся на кровати или сидят в кресле, или т.п. Каждый поток собранных обучающих данных об ускорении маркируют в соответствии с текущим движением пациента и поток данных об ускорении может быть обработан для генерирования репрезентативного вектора признаков. В качестве неограничивающего примера, подходящие признаки могут включать: максимальную магнитуду ускорения за различные интервалы времени; максимальное ускорение в направляющей составляющей (например, направлении х) за различные интервалы времени; вариабельность ускорения за различные интервалы времени; или тому подобное. Предпочтительно, данные признаки выбирают так, чтобы они были доказательными в отношении движения пациента и эффективными для вычисления. Получаемые в результате обучающие данные (наборы признаков, каждый из которых отмечен фактическим движением пациента) используют для обучения классификатора движения пациента или набора классификаторов движения пациента (например, бинарного классификатора для определения того, находится ли пациент в состоянии покоя, бинарного классификатора для определения того, передвигается ли пациент на медицинской тележке, и т.д.).
После этого, классификатор 28 движения применяет обученные классификаторы. На данной заключительной стадии акселерометр 12 собирает данные об ускорении, зависящие от времени. Выбранные признаки вычисляют для данных об ускорении и вводят в обученный(е) классификатор(ы), который(е) выводит(ят) классификацию движения пациента.
Предпочтительно, акселерометр 12 может быть использован для выполнения других значимых задач. Например, в некоторых вариантах реализации акселерометр 12 сообщается с детектором 38 падения, реализованным посредством электронных компонентов 16 устройства. Датчик 38 обнаружения падения осуществляет мониторинг потока данных об ускорении для обнаружения события ускорения, которое является показательным в отношении падения пациента (например, резкое и кратковременное ускорение). Если детектор 38 падения обнаруживает (возможное) падение, то детектор 38 падения запускает звуковую сигнализацию 40, содержащуюся в электронных компонентах 16 устройства. Кроме того, электронные компоненты 16 устройства также могут содержать дисплей 4, который отображает визуальный сигнал тревоги в отношении падения пациента. Кроме того, сигнал тревоги о падении пациента также может быть передан по беспроводной связи на пост медсестры посредством радиосистемы 14. В дополнение, дисплей 4 также может отображать различную информацию, такую как: мощность сигнала ТД; (2) тип движения пациента; и (3) по меньшей мере один параметр пациента, измеренный физиологическим датчиком 32 (например, линию тренда показателя жизненно важной функции, такую как линия тренда частоты сердечных сокращений).
На фиг. 2 показана иллюстративная блок-схема способа 100 использования монитора 10 пациента. Способ 100 включает следующие этапы:
сбор данных, являющихся показательными в отношении движения пациент (например, данных об ускорении), от акселерометра 12 (Этап 102);
классифицирование движения пациента на основе собранных данных об ускорении (Этап 104);
поиск подходящих пороговых значений для сканирования и перехода для классификации движения пациента из справочной таблицы 26 (Этап 106);
при необходимости, регулирование этих пороговых значений для сканирования и перехода на основе данных о показателях жизненно важных функций (Этап 108); и
управление интерфейсом 20 конфигурирования радиосистемы для обновления пороговых значений для сканирования и перехода для радиоаппарате 14 (Этап 110).
В данных иллюстративных примерах классификатор 28 движения пациента работает с данными об ускорении, полученными акселерометром 12. Преимущественно, выгодно использовать акселерометр, который может быть предоставлен для другой цели, такой как обнаружение падения. Кроме того, в целом приемлемой является оценка типа (т.е. класса) движения пациента на основе данных об ускорении. Однако в некоторых случаях ускорение само по себе может быть неэффективным для оценки движения пациента. Например, если пациент находится на очень плавно передвигающейся медицинской тележке, которая движется по прямой линии вниз по прямому проходу, то по существу единственным ускорением, действующим на пациента является ускорение свободного падения, при этом из данного по существу постоянного ускорения может быть сложно определить то, что пациент движется. Следовательно, в некоторых вариантах реализации классификатором 20 движения может быть использован другой источник данных для оценки типа (класса) движения пациента. Например, в дополнение или в качестве альтернативы, классификатор 28 движения может оценивать движение пациента на основе первой производной, соответствующей времени мощности ТД. В данном случае быстро изменяющаяся мощность ТД (увеличивающаяся или уменьшающаяся) является показательной в отношении быстрого движения пациента, тогда как по существу постоянная мощность ТД указывает на то, что пациент находится в состоянии покоя. В одном примере текущая скорость медицинской тележке может быть получена из прошлых измерений ускорения. Когда движение медицинской тележки происходит с постоянной скоростью в направлении x (с небольшим ускорением в направлении y и направлении z), классификатор 28 движения определяет то, что пациент «едет» (например, на медицинской тележке, на кресле-каталке и тому подобном).
Электронные компоненты 16 устройства подходящим образом реализованы в виде микропроцессора, запрограммированного аппаратным или программным обеспечением на выполнение описанных операций. С этой целью электронные компоненты могут включать в себя компоненты, являющиеся вспомогательными для микропроцессора, такие как память для данных, ПЗУ, СППЗУ, флэш-память, накопитель на магнитном диске или другой некратковременный носитель для хранения данных, хранящий инструкции, считываемые и исполняемые микропроцессором для выполнения описанных функций, или тому подобное.
Настоящее изобретение было описано со ссылкой на предпочтительные варианты реализации. Специалистам в данной области техники могут быть ясны модификации и изменения после прочтения и понимания представленного выше подробного описания. Предполагается, что настоящее изобретение выполняют так, чтобы включить все такие модификации и изменения в такой мере, в какой они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МОНИТОРИНГА ДЛЯ МОНИТОРИНГА ФИЗИОЛОГИЧЕСКОГО СИГНАЛА | 2012 |
|
RU2637610C2 |
| СИСТЕМА КОНТРОЛЯ ЖИЗНЕННО ВАЖНЫХ ПОКАЗАТЕЛЕЙ ЗДОРОВЬЯ ПАЦИЕНТА | 2010 |
|
RU2454924C2 |
| СИСТЕМА И СПОСОБ МОНИТОРИНГА ДВИЖЕНИЙ НИЖНИХ КОНЕЧНОСТЕЙ | 2024 |
|
RU2834150C1 |
| КОМПЬЮТЕРИЗИРОВАННОЕ ИНСТРУМЕНТАЛЬНОЕ СРЕДСТВО ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ И МЕДИЦИНСКОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ РАСЧЕСОВ И ПРОГНОЗИРОВАНИЯ ПОКРАСНЕНИЙ | 2021 |
|
RU2818831C1 |
| Система мониторинга и контроля температуры и влажности при складировании и перевозке скоропортящихся грузов | 2019 |
|
RU2732678C1 |
| УСТРОЙСТВО СЕТЕВОГО ПЕРЕКЛЮЧЕНИЯ И СПОСОБ РАБОТЫ УСТРОЙСТВА СЕТЕВОГО ПЕРЕКЛЮЧЕНИЯ | 2020 |
|
RU2751083C1 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| УСТРОЙСТВО ОБРАБОТКИ И СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕДВИЖЕНИЯ СУБЪЕКТА | 2017 |
|
RU2715438C1 |
| ОБРАБОТКА ИНФОРМАЦИИ ДАТЧИКА | 2014 |
|
RU2622880C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПОСРЕДСТВОМ ИЗМЕРЕНИЯ НАПРЯЖЕНИЯ НА АККУМУЛЯТОРЕ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2748292C2 |

Изобретение относится к мобильной связи. Мобильное устройство (10) для мониторинга пациента содержит радиосистему (14), которая имеет пороговое значение для сканирования и пороговое значение для перехода, которое ниже порогового значения для сканирования или равно ему. Радиосистема выполнена с возможностью: сканирования для идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения для сканирования, но выше порогового значения для перехода; и перехода к доступной точке доступа, когда мощность текущей точки доступа находится ниже порогового значения для перехода. Трехмерный акселерометр (12) выполнен с возможностью измерения ускорения. Электронные компоненты (16) устройства содержат по меньшей мере один процессор (24, 28), запрограммированный на: прием данных о показателях жизненно важных функций по меньшей мере от одного соответствующего физиологического датчика (32); классифицирование движения пациента на основе ускорения, измеренного 3D-акселерометром; и присваивание пороговых значений для сканирования и перехода радиосистемы по меньшей мере на основе классификации движения пациента. Технический результат заключается в обеспечении непрерывности соединения устройства для медицинского мониторинга с сетью через точку доступа. 3 н. и 12 з.п. ф-лы, 2 ил., 1 табл.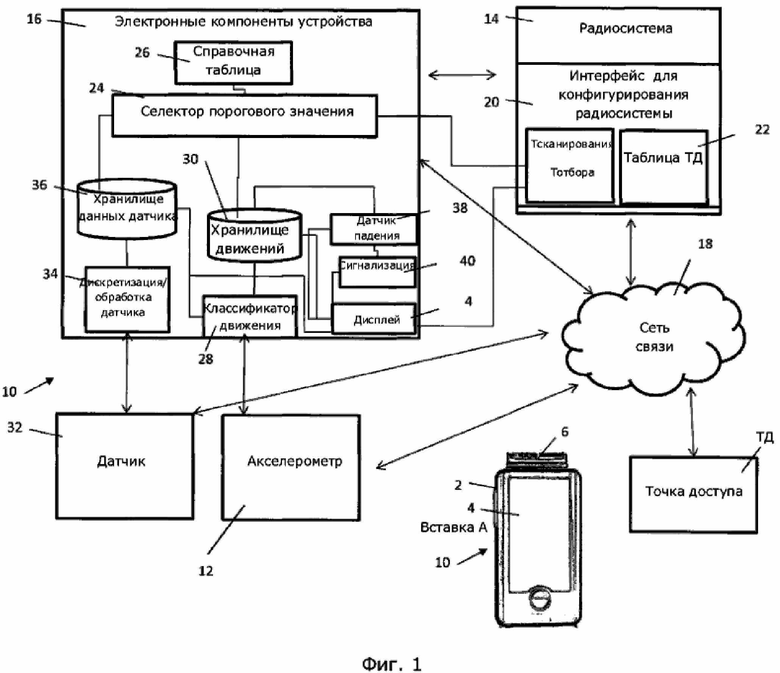
1. Мобильное устройство (10) для мониторинга пациента, содержащее:
радиосистему (14), имеющую пороговое значение для сканирования и пороговое значение для перехода, которое ниже порогового значения для сканирования или равно ему, при этом радиосистема (14) выполнена с возможностью:
сканирования для идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения для сканирования, но выше порогового значения для перехода; и
переключения на доступную точку доступа, когда мощность текущей точки доступа ниже порогового значения для перехода;
трехмерный (3D) акселерометр (12), выполненный с возможностью измерения ускорения; и
электронные компоненты (16) устройства, содержащие по меньшей мере один процессор (24, 28), характеризующееся тем, что указанный по меньшей мере один процессор (24, 28) запрограммирован на:
прием данных о показателях жизненно важных функций по меньшей мере от одного соответствующего физиологического датчика (32);
классифицирование движения пациента по ускорению, измеренному 3D-акселерометром (12); и
присваивание величин пороговому значению для сканирования и пороговому значению для перехода радиосистемы (14) по меньшей мере на основе классификации движения пациента.
2. Мобильное устройство (10) для мониторинга пациента по п. 1, дополнительно включающее по меньшей мере один физиологический датчик (32), выполненный с возможностью получения данных о показателях жизненно важных функций и передачи полученных данных о показателях жизненно важных функций на электронные компоненты (16) устройства.
3. Мобильное устройство (10) для мониторинга пациента по п. 1 или 2, в котором по меньшей мере один процессор (24, 28) запрограммирован на присваивание или вычисление более высоких пороговых значений для сканирования и перехода для классификаций движения пациента, соответствующего быстрому движению пациента, и с возможностью присваивания или вычисления более низких пороговых значений для сканирования и перехода для классификаций движения пациента, содержащих классификации состояния покоя пациента.
4. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-3, в котором по меньшей мере один процессор (24, 28) запрограммирован на назначение пороговых значений для сканирования и перехода дополнительно на основе принятых данных о показателях жизненно важных функций.
5. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-4, в котором по меньшей мере один процессор (24, 28) запрограммирован на увеличение пороговых значений для сканирования и перехода в ответ на физиологически ненормальные или ошибочные принятые данные о показателях жизненно важных функций.
6. Мобильное устройство (10) для мониторинга пациента по пп. 1-5, в котором по меньшей мере один процессор (24, 28) запрограммирован на снижение пороговых значений для сканирования и перехода в ответ на физиологически нормальные или стабильные принятые данные о показателях жизненно важных функций.
7. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-6, в котором по меньшей мере один процессор запрограммирован на:
формирование таблицы (22) точек доступа, содержащей доступные точки доступа, идентифицированные последним сканированием;
причем радиосистема (14) выполнена с возможностью осуществления переключения путем извлечения доступных точек доступа из таблицы (22) точек доступа для радиосистемы (14).
8. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-7, в котором по меньшей мере один процессор (24, 28) дополнительно запрограммирован на:
обновление пороговых значений для сканирования и перехода, вычисленных или хранящихся в справочной таблице (26), в которой перечислены пороговые значения для сканирования и перехода для различных классификаций движения пациента, на основе принятых данных о показателях жизненно важных функций.
9. Мобильное устройство для мониторинга пациента по одному из пп. 1-8, в котором по меньшей мере один процессор (24, 28) дополнительно запрограммирован на:
реализацию датчика (38) падения, выполненного с возможностью обнаружения возможного падения пациента на основе ускорения, измеренного 3D-акселерометром (12); и генерирование по меньшей мере одного из звукового сигнала тревоги в сигнализации (40) в электронных компонентах (16) устройства и визуального сигнала тревоги на дисплее (4) в электронных компонентах (16) устройства, когда датчиком падения обнаружено возможное падение пациента.
10. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-9, которое дополнительно содержит:
корпус (2), содержащий встроенный дисплей (4), причем радиосистема (14), 3D-акселерометр (12) и электронные компоненты (16) устройства заключены внутри корпуса (2), так что мобильное устройство (10) для мониторинга пациента представляет собой единое устройство, а 3D-акселерометр (12) выполнен с возможностью измерения ускорения мобильного устройства (10) для мониторинга пациента; и порт (6) для датчиков, через который по меньшей мере один соответствующий физиологический датчик (32) функционально соединен с мобильным устройством (10) для мониторинга пациента.
11. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-9, которое дополнительно содержит:
корпус (2), содержащий встроенный дисплей (4), причем радиосистема (14) и электронные компоненты (16) устройства заключены внутри корпуса (2), так что мобильное устройство (10) для мониторинга пациента представляет собой единое устройство; и порт (6) для датчиков, через который по меньшей мере один соответствующий физиологический датчик (32) функционально соединен с мобильным устройством (10) для мониторинга пациента;
причем 3D-акселерометр (12) представляет собой отдельный блок, который не расположен внутри корпуса, и функционально соединен с мобильным устройством для мониторинга пациента через порт (6) для датчиков.
12. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-11, дополнительно включающее в себя дисплей (4), выполненный с возможностью отображения по меньшей мере одного из типа перемещений пациента и по меньшей мере одного параметра пациента, измеренного физиологическим датчиком.
13. Мобильное устройство (10) для мониторинга пациента по одному из пп. 1-12, в котором радиосистема (14) представляет собой радиосистему, совместимую со стандартом IEEE 802.11.
14. Мобильное устройство (10) для мониторинга пациента, содержащее:
радиосистему (14), имеющую пороговое значение для сканирования и пороговое значение для перехода, которое ниже порогового значения для сканирования или равно ему, при этом радиосистема (14) выполнена с возможностью:
сканирования для идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения для сканирования, но выше порогового значения для перехода; и
переключения на доступную точку доступа, когда мощность текущей точки доступа ниже порогового значения для перехода; и
электронные компоненты (16) устройства, содержащие по меньшей мере один процессор (24, 28), характеризующееся тем, что указанный по меньшей мере один процессор (24, 28) запрограммирован на:
прием данных о показателях жизненно важных функций по меньшей мере от одного соответствующего физиологического датчика (32); и
присваивание величин пороговому значению для сканирования и пороговому значению для перехода радиосистемы (14) по меньшей мере на основе принятых данных о показателях жизненно важных функций.
15. Энергонезависимый носитель для хранения данных, в котором хранятся инструкции, считываемые и исполняемые одним или более микропроцессорами (16, 24, 28, 34, 38) мобильного устройства (10) для мониторинга пациента по любому из пп. 1-13 для выполнения следующих операций:
прием полученных данных о показателях жизненно важных функций;
управление радиосистемой (14) мобильного устройства (10) для мониторинга пациента для сканирования с целью идентификации доступных точек доступа, когда мощность текущей точки доступа ниже порогового значения для сканирования или равно ему, но выше порогового значения для перехода, которое ниже порогового значения для сканирования или равно ему;
управление радиосистемой (14) для переключения на доступную точку доступа, когда мощность текущей точки доступа ниже порогового значения для перехода;
характеризующийся тем, что операции также включают:
классифицирование движения пациента по наборам данных об ускорении, принятых от 3D-акселерометра (12) мобильного устройства (10) для мониторинга пациента; и присваивание величин пороговому значению для сканирования и пороговому значению для перехода радиосистемы (14) на основе классификации движения пациента.
| WO 2010004538 A1, 14.01.2010 | |||
| US 8457038 B1, 04.06.2013 | |||
| US 2004199056 A1, 07.10.2004 | |||
| RU 2012146967 A, 27.05.2014. |

