ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение относится к устройству обработки, системе и способу для определения передвижения субъекта. Настоящее изобретение дополнительно относится к соответствующей компьютерной программе для выполнения указанного способа.
УРОВЕНЬ ТЕХНИКИ
[002] Показатели жизненно важных функций человека, например частота сердечных сокращений (ЧСС), могут служить индикаторами текущего состояния человека и мощными прогностическими факторами или серьезными медицинскими явлениями. В клинической обстановке показатели жизненно важных функций обычно измеряют в условиях строгого контроля. Измерительное устройство накладывается в правильной ориентации и в заранее определенном месте обученным специалистом. Затем показатели жизненно важных функций измеряют в определенной обстановке, например когда пациент хорошо отдохнул или выполняет заданное упражнение, например во время электрокардиографии с нагрузкой в соответствии с указаниями медсестры.
[003] С появлением более мелких, менее дорогих и создающих меньше неудобств устройств мониторинг состояния здоровья становится возможным в домашней или иной неклинической обстановке. Проблема при измерении показателей жизненно важных функций состоит в том, что для правильной интерпретации показателей жизненно важных функций требуется контекстная информация о том, что пациент делает и/или делал, что могло бы потенциально повлиять на показатели жизненно важных функций. Кроме того, если контекстная информация доступна, дополнительную информацию, можно получить, например, выполняя (а) мониторинг показателей жизненно важных функций субъекта в домашней обстановке в расслабленном или спокойном состоянии для получения исходных показателей жизненно важных функций в состоянии покоя или (b) мониторинг показателей жизненно важных функций сразу после определенного действия, например с получением показателей жизненно важных функций после подъема по лестнице.
[004] Для пожилых или больных людей одним из наиболее энергозатратных и часто встречающихся видов действия является передвижение или ходьба. Поэтому было бы полезно точно обнаруживать ходьбу, в частности, в приведенной в качестве примера ситуации с пожилыми и/или больными пациентами, которые могут ходить очень медленно.
[005] US 2014/0019080 А1 относится к калибровке закрепляемого на груди беспроводного сенсорного устройства для определения положения тела и выполняемого действия. В указанном документе предложен алгоритм обнаружения ходьбы, включающий:
получение необработанных акселерометрических данных по трем осям (x, у, z),
вычисление площади величины сигнала (signal magnitude area, SMA) для заданного временного интервала,
вычисление величины ускорения в горизонтальной плоскости (maghorz) и общей (magtotal) и сравнение рассчитанной площади величины сигнала, SMA, и величины ускорений с различными пороговыми значениями.
На основе сравнения указанных величин ускорения с определенной последовательностью различных пороговых значений действие можно классифицировать как ходьбу. Для вычисления величины ускорения в горизонтальной плоскости на первом этапе определяют гравитационную составляющую. На ее основе рассчитывают величину ускорения в горизонтальной плоскости в качестве следующего этапа.
[006] В US 2008/0190202 описано устройство обнаружения движения, содержащее акселерометр и систему обработки, выполненную с возможностью анализа значений измерения ускорения, получаемых от акселерометра. В частности, система обработки определяет ориентацию акселерометра для определения тем самым действия пользователя.
[007] В US 2015/0272480 описана программа обработки выходного сигнала датчика ускорения, выполненная с возможностью выделения вектора гравитационной составляющей и вектора колебательной составляющей из выходного сигнала датчика ускорения, который был пропущен через фильтр нижних частот и фильтр верхних частот, соответственно.
[008] В US 2013/0298636 описан способ калибровки датчика положения тела. В частности, выделяют характеристику компонента переменного тока сигнала ускорения, чтобы определить, находится ли пользователь в состоянии ходьбы или нет.
[009] US 2008/0082018 относится к способам обработки дыхательных сигналов. В одном примере акселерометрические данные используют для улучшения подавления артефактов движения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0010] Задачей изобретения является создание улучшенных устройства, системы и способа для определения передвижения субъекта. В частности, было бы полезно точно определять передвижение, даже при очень медленной ходьбе субъекта.
[0011] Согласно первому аспекту настоящего изобретения предложено устройство обработки для определения передвижения. Устройство обработки выполнено с возможностью выполнения следующих этапов:
получение акселерометрических данных, указывающих на движение туловища субъекта;
выполнение фильтрации верхних частот на акселерометрических данных для получения отфильтрованных по верхним частотам акселерометрических данных;
выделение по меньшей мере одной из множества ортогональных составляющих движения из отфильтрованных по верхним частотам акселерометрических данных;
выполнение фильтрации нижних частот на акселерометрических данных для получения отфильтрованных по нижним частотам данных акселерометра;
определение гравитационной составляющей из отфильтрованных по нижним частотам акселерометрических данных;
сравнение направления по меньшей мере одной из упомянутых ортогональных составляющих движения с направлением гравитационной составляющей и
классифицирование движения субъекта как передвижение, если составляющая движения ортогональна или параллельна гравитационной составляющей.
[0012] Согласно другому аспекту настоящего изобретения предложена система для определения передвижения субъекта, содержащая:
- акселерометр для получения акселерометрических данных, указывающих на движение туловища субъекта; и
- устройство обработки, которое описано в настоящем документе, для определения перемещающего телодвижения субъекта.
[0013] Согласно еще одному аспекту настоящего изобретения предложены соответствующий способ, компьютерная программа, которая содержит средства программного кода для обеспечения выполнения компьютером этапов способа, описанного в настоящем документе, когда компьютерная программа осуществляется на компьютере, а также некратковременного машиночитаемого носителя, хранящего в себе компьютерный программный продукт, который при исполнении процессором вызывает реализацию способа, описанного в настоящем документе.
[0014] Предпочтительные варианты реализации настоящего изобретения определены в зависимых пунктах. Следует понимать, что заявленные способ, система, компьютерная программа и носитель имеют похожие и/или идентичные предпочтительные варианты реализации, что и заявленная система, в частности, как определено в зависимых пунктах и как описано в настоящем документе.
[0015] Предложенные в настоящем документе решения обеспечивают возможность надежного определения передвижения субъекта, например определения того, идет ли пациент. Тем самым предложенное решение позволяет получать контекстную информацию, которая может быть использована для измерений показателей жизненно важных функций, в частности, для пожилых и/или больных людей в домашней обстановке или в условиях амбулаторного лечения. Поскольку связанные с передвижением действия могут быть весьма энергозатратными для этих людей, они могут ходить медленно, и очень важно обеспечить надежный способ обнаружения медленного передвижения, чтобы правильно интерпретировать измеряемые показатели жизненно важных функций. Кроме того, надежное обнаружение медленного передвижения обеспечивает способ автокалибровки, основанный на различных компонентах перемещения, в том числе при таких сценариях.
[0016] На абстрактом уровне, акселерометрические данные подаются в качестве входных данных в предлагаемое устройство обработки и на их основе в качестве выходных данных может быть получено указание того, осуществляет ли субъект передвижение. Акселерометрические данные могут быть получены акселерометром, наложенным на туловище субъекта. Под акселерометрическими данными могут, в частности, пониматься трехосевые акселерометрические данные, полученные посредством трехосевого акселерометра.
[0017] Настоящее изобретение основано на идее выделения по меньшей мере одной из различных ортогональных составляющих движения из (только) отфильтрованных по верхним частотам акселерометрических данных и последующего сравнения направления по меньшей мере одной из них с направлением гравитационной составляющей. В частности, ортогональные составляющие движения выделяют с использованием метода разделения источников, который эффективно обеспечивает идентификацию таких составляющих движения без необходимости знания направления гравитации. Это позволяет улучшить точность и достоверность распознания и выделения составляющей движения из акселерометрических данных. Кроме того, использование метода разделения источников само по себе обеспечивает более точное выделение составляющих движения из акселерометрических данных.
[0018] В некоторых вариантах реализации способ включает в себя выделение множества (например, двух или более) ортогональных составляющих движения. В еще одних вариантах реализации способ включает в себя выделение трех ортогональных составляющих движения. Составляющие движения ортогональны друг к другу.
[0019] Можно выделить три различные ортогональные составляющие движения: (1) срединно-боковая составляющая движения (ML), т.е. составляющая движения в боковом направлении или слева направо; (2) передне-задняя составляющая движения (АР), т.е. составляющая движения спереди назад или от передней части к задней части, и (3) вертикальная составляющая движения (VT), т.е. составляющая движения сверху вниз. Было установлено, что ортогональные составляющие движения могут быть выделены на основе их временных структур, отличающихся друг от друга. Ортогональные составляющие движения выделяют из отфильтрованных по верхним частотам акселерометрических данных. Использование фильтра верхних частот приводит к тому, что акселерометрические данные не содержат усредненного вектора гравитации или гравитационной составляющей. Следовательно, выделение по меньшей мере одной ортогональной составляющей движения не имеет отклонения, основанного на предварительной известности гравитационной составляющей. Напротив, сигнал, который не содержит усредненной гравитационной составляющей, может быть использован в качестве базиса. Следовательно, в отличие от решений известного уровня техники систему координат для ортогональных составляющих движения не выводят, начиная с гравитационной составляющей. Вместо этого, гравитационную составляющую используют для последующего сравнения.
[0020] Гравитационную составляющую можно определить из отфильтрованных по верхним частотам акселерометрических данных. Такие отфильтрованные по верхним частотам акселерометрические данные можно рассматривать как средний вклад гравитации на осях акселерометра. В решении, предложенном в настоящем документе, гравитационная составляющая может быть затем использована для сравнения направления по меньшей мере одной ортогональной составляющей движения с направлением гравитационной составляющей. На этой основе движение субъекта может быть классифицировано как передвижение, если составляющая движения ортогональна или параллельна гравитационной составляющей. Предполагается, что срединно-боковая составляющая движения и передне-задняя составляющая движения ортогональны гравитационной составляющей, тогда как вертикальная составляющая движения предполагается параллельной гравитационной составляющей или находящейся на одной линии с ней.
[0021] Преимуществом решения, предложенного в настоящем документе, является то, что оно эффективно позволяет определять также медленные передвижения субъекта. В отличие от этого, сравнение величин ускорения с пороговыми значениями хотя и общепринято для определений таких действий, как бег, может оказаться нерезультативным при оценке медленных движений пожилых и/или больных людей. В частности, составляющая ML может обеспечивать очень хорошее качество обнаружения в случаях медленной ходьбы. Другим преимуществом является то, что становится возможным обнаружение шагов левой ногой и правой ногой. Для классификации движения как передвижение можно сравнить направление ML с направлением гравитации, чтобы определить, ортогональны ли они.
[0022] В соответствии с одним вариантом реализации устройство обработки может быть выполнено с возможностью выделения срединно-боковой и/или передне-задней составляющей движения из отфильтрованных по верхним частотам акселерометрических данных. В качестве альтернативы или дополнительно, может быть выделена вертикальная составляющая движения на основе отфильтрованных по верхним частотам акселерометрических данных.
[0023] В одном варианте реализации устройство обработки выполнено с возможностью выделения по меньшей мере одной из множества ортогональных составляющих движения на основе метода разделения источников, в частности, на основе линейной предсказуемости, слепого разделения источников (СРИ) и/или анализа независимых компонент (АНК). На основе таких методов ортогональные составляющие движения могут быть определены из отфильтрованных по верхним частотам акселерометрических данных, а значит, без использования предварительно известного вектора гравитации. Следовательно, одну или более из этих выделенных ортогональных составляющих движения можно сравнить с направлением гравитационной составляющей, чтобы оценить, может ли характеристическая ориентация соответствующей ортогональной составляющей движения быть определена относительно гравитационной составляющей. В качестве результата метода разделения источников может быть получена соответствующая ось по меньшей мере одной ортогональной составляющей движения, а также, необязательно, составляющая сигнала вдоль этой оси. Эффективно использующие память и недорогие итеративные структуры для разделения источников описаны, например, в работе Choi et al., «Blind Source Separation and Independent Component Analysis: A Review», Neural Information Processing - Letters and Reviews, Vol 6., No. 1, January 2005.
[0024] В качестве улучшения метод разделения источников может обеспечивать возможность отделения по меньшей мере одной из ортогональных составляющих движения на основе их временной структуры, в частности, путем максимального увеличения автокорреляции при заданном запаздывании по времени. Под автокорреляцией может пониматься также нормированная автокорреляция, например, когда функция автокорреляции при нулевом запаздывании нормирована к единице. Используемый в настоящем документе термин «запаздывание по времени» может относиться также к периоду запаздывания по времени. Другими словами, вместо рассмотрения одного запаздывания можно учитывать (необязательно) взвешенное среднее значение нескольких запаздываний, что может дополнительно улучшить надежность. Было установлено, что, в частности, направление срединно-боковой (ML) составляющей движения в произвольно ориентированных отфильтрованных по верхним частотам акселерометрических данных можно определять на основе автокорреляции при определенном запаздывании по времени. В частности, было установлено, что при определенном запаздывании автокорреляция может быть самой высокой для составляющей ML. Благодаря этому составляющую ML можно отличать, например, от составляющей VT или АР. В дополнение или в качестве альтернативы составляющую АР можно отличать от составляющей VT.
[0025] В качестве улучшения метод разделения источников может обеспечивать возможность максимального увеличения автокорреляции при заданном запаздывании по времени, причем это запаздывание по времени может быть от 100 мс до 500 мс, предпочтительно от 150 мс до 400 мс, более предпочтительно от 200 мс до 350 мс. Следует понимать, что эти диапазоны значений включают в себя граничные значения. Было установлено, что, в частности, для определения срединно-боковой составляющей могут быть использованы максимальное увеличение автокорреляции и запаздывание по времени в диапазоне от 200 мс до 350 мс.
[0026] В одном варианте реализации устройство обработки может быть выполнено с возможностью выделения первой ортогональной составляющей движения на основе метода разделения источников, который обеспечивает возможность максимального увеличения автокорреляции при первом заданном запаздывании по времени; а также выполнено с возможностью выделения второй ортогональной составляющей движения на основе метода разделения источников, который обеспечивает возможность максимального увеличения автокорреляции при втором заданном запаздывании по времени. Например, на первом этапе в качестве первой ортогональной составляющей движения может быть выделена срединно-боковая составляющая. Соответствующее запаздывание по времени для максимального увеличения автокорреляции с помощью метода разделения источников может быть в диапазоне от 200 мс до 350 мс. После того, как срединно-боковая составляющая определена, можно вычислить подпространство, ортогональное срединно-боковой составляющей. На втором этапе можно выделить вторую ортогональную составляющую движения, такую как передне-задняя составляющая движения, на основе метода разделения источников, который может, например, максимально увеличивать автокорреляцию при втором заданном запаздывании по времени. Например, для получения передне-задней составляющей движения может быть максимально увеличена автокорреляция при запаздывании по времени в диапазоне от 50 мс до 100 мс, предпочтительно при 75 мс.
[0027] В одном варианте реализации этап выделения одной или более ортогональных составляющих движения может включать:
выделение первой ортогональной составляющей движения на основе метода разделения источников;
определение на основе отфильтрованных по верхним частотам акселерометрических данных и первой составляющей движения двухмерного подпространства, ортогонального первой составляющей движения; и
выделение второй составляющей движения на основе этого подпространства.
Например, на основе метода разделения источников можно выделить срединно-боковую составляющую. На последующем этапе из указанного подпространства можно выделить вторую ортогональную составляющую движения, такую как передне-задняя составляющая движения, Преимущество использования подпространства заключается в том, что размерность можно сократить до комбинации 2 источников. Следовательно, можно уменьшить сложность и вычислительные затраты. Это можно назвать также «понижением порядка». Таким образом, комбинацию трех источников первоначальных акселерометрических данных, полученных с помощью трехосевого акселерометра, можно сократить до комбинации двух источников. Аналогичный метод разделения источников можно применять для выделения второго источника. В итоге останется третий источник, который ортогонален двум другим источникам.
[0028] В качестве улучшения данного варианта реализации устройство обработки может быть выполнено с возможностью выделения второй составляющей движения на основе подпространства и отфильтрованной по верхним частотам нормы акселерометрических данных. Следовательно, в качестве альтернативы или в дополнение к выделению второй ортогональной составляющей движения на основе метода разделения источников можно использовать альтернативный подход. Таким образом, предлагается использовать отфильтрованную по верхним частотам норму (вектора) акселерометрических данных в качестве опорного сигнала для выделения вертикальной составляющей движения из акселерометрических данных. Для поиска корреляции между отфильтрованной по верхним частотам нормой и отфильтрованными по верхним частотам акселерометрическими данными можно использовать нормализованный метод наименьших квадратов (НМНК).
[0029] Например, после выделения с помощью НМНК вертикальной составляющей можно вычислить векторное произведение этой вертикальной составляющей и ранее определенной срединно-боковой составляющей, чтобы выделить передне-заднюю составляющую. Затем одну или более из этих ортогональных составляющих движения можно сравнить с направлением гравитационной составляющей. Например, если срединно-боковая составляющая и/или передне-задняя составляющая ортогональны гравитационной составляющей, движение субъекта можно классифицировать как передвижение.
[0030] В одном варианте реализации на этапе классифицирования движения субъекта как составляющую передвижения можно считать ортогональной гравитационной составляющей, если абсолютное значение скалярного произведения составляющей движения и гравитационной составляющей ниже заданного порога. Следует понимать, что используемые в настоящем документе термины «составляющая движения» и/или «гравитационная составляющая» могут относиться к нормализованному вектору или значению. Кроме того, следует понимать, что для ортогональных составляющих движения ML и АР скалярное произведение с гравитационной составляющей в идеале будет равно нулю. Однако используемые в настоящем документе составляющие движения и гравитационная составляющая считаются ортогональными, если абсолютное значение скалярного произведения составляющей движения и гравитационной составляющей меньше заданного порога. Например, угловое отклонение до ± 10°, в частности до ± 5°, может быть все еще приемлемым. Соответственно, на этапе классифицирования движения субъекта как составляющую передвижения VT можно считать ортогональной гравитационной составляющей, если абсолютное значение векторного произведения или векторного произведения векторной составляющей движения VT и гравитационной составляющей ниже заданного порога. Следует понимать, что сюда также входит эквивалентный случай, в котором вместо векторного произведения двух параллельных векторов, являющегося нулевым, можно оценить свойство, заключающееся в том, что абсолютное значение скалярного произведения двух нормализованных и параллельных векторов близко к единице.
[0031] В одном варианте реализации устройство обработки может быть дополнительно выполнено с возможностью выполнения этапа калибровки акселерометрических данных на основе по меньшей мере одной выделенной ортогональной составляющей движения. Например, оси ортогональных составляющих движения ML, АР, VT можно использовать для выполнения автокалибровки акселерометра. Преимущество данного варианта реализации состоит в том, что он может обеспечить улучшенное определение положения тела в том случае, когда люди могут по своему усмотрению накладывать акселерометр на туловище в разных положениях. Следовательно, ориентация акселерометра, наложенного неспециалистом, также может быть эффективно скорректирована в случае медленно движущегося пожилого и/или больного субъекта.
[0032] В одном варианте реализации устройство обработки может быть дополнительно выполнено с возможностью выполнения этапа распознания отдельных шагов и/или определения параметра походки во время передвижения на основе по меньшей мере одной выделенной ортогональной составляющей движения. Например, для определения отдельных шагов можно вычислить движение влево-вправо в срединно-боковой составляющей. Дополнительно или в качестве альтернативы к этапу определения могут быть эффективно выведены связанные с походкой параметры, так как они могут быть уместны с клинической точки зрения, в частности, для обнаружения ухудшения состояния.
[0033] В качестве улучшения устройство обработки может быть выполнено с возможностью идентификации отдельных шагов левой ногой и правой ногой на основе переходов через нуль при возрастании и понижении срединно-боковой составляющей и/или на основе впадин в вертикальной или передне-задней составляющей движения. Например, впадины могут указывать на момент отрыва носка ноги при выполнении шага. Идентификация отдельных шагов левой ногой и правой ногой дополнительно позволяет вычислять точное количество шагов.
[0034] Используемый в настоящем документе термин «передвижение» может в целом относиться к ходьбе или пешему перемещению. Этот термин может также охватывать более широкий диапазон напоминающих ходьбу действий, таких как подъем по лестнице, ходьба с разными скоростями, неровная или несимметричная ходьба и/или ходьба с использованием вспомогательных средств для ходьбы, таких как палочка, трость, ходунки или костыль.
[0035] Используемый в настоящем документе термин «акселерометрические данные» может относиться к данным акселерометра, в частности, к трехмерным или трехосевым данным акселерометра, получаемым с помощью трехосевого акселерометра, наложенного на туловище субъекта. Трехосевой акселерометр - это устройство, которое измеряет ускорение в трех направлениях, называемых сенсорными осями x, у и z. Показание акселерометра может состоять из трехэлементного вектора, имеющего компоненты x, у и z, представляющие ускорение, измеряемое на соответствующих сенсорных осях. Данные акселерометра могут представлять последовательность таких векторов во времени. Оси акселерометра необязательно совпадают с осями тела субъекта, так как акселерометр может быть наложен на туловище субъекта в произвольной ориентации и не в точно определенном месте. Следовательно, существует необходимость выделения ортогональных составляющих движения, отражающих различные оси тела. Для совмещения осей акселерометра с осями тела можно применять матрицу вращения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0036] Эти и другие аспекты настоящего изобретения будут очевидны из вариантов реализации, описанных здесь, и будут пояснены со ссылкой на данные варианты реализации. Содержание чертежей:
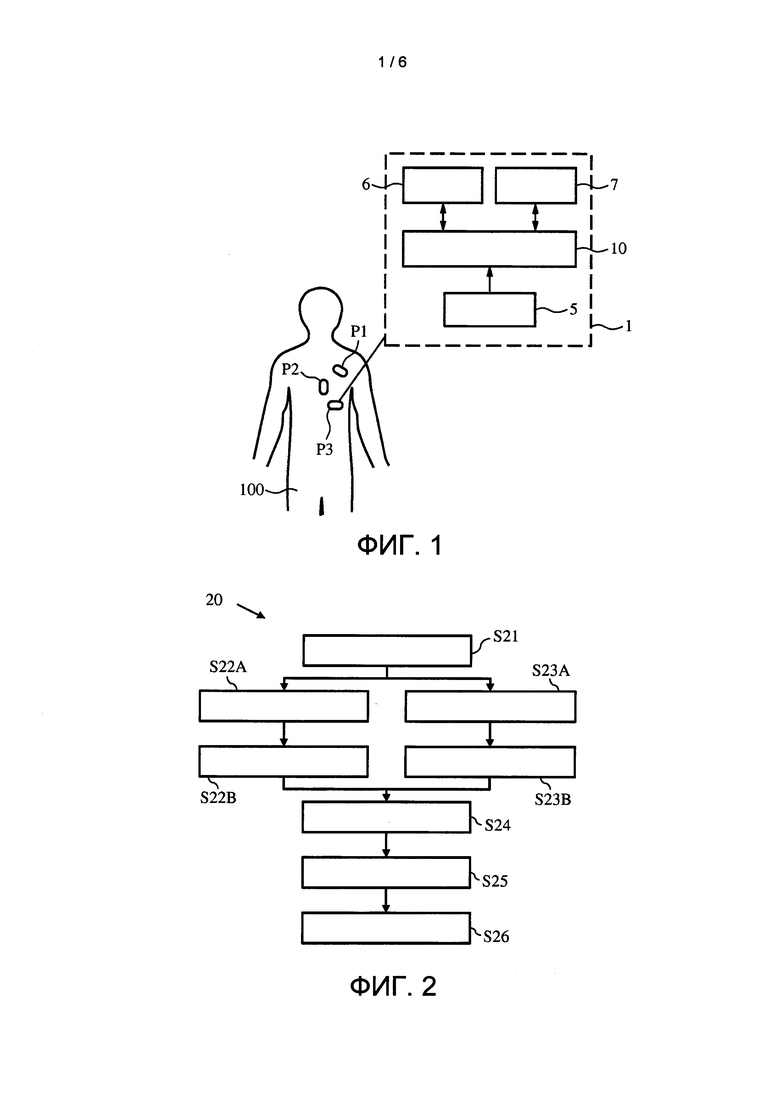
на ФИГ. 1 приведена схематическая диаграмма первого варианта реализации системы в соответствии с аспектом настоящего изобретения;
на ФИГ. 2 приведена блок-схема способа в соответствии с аспектом настоящего изобретения;
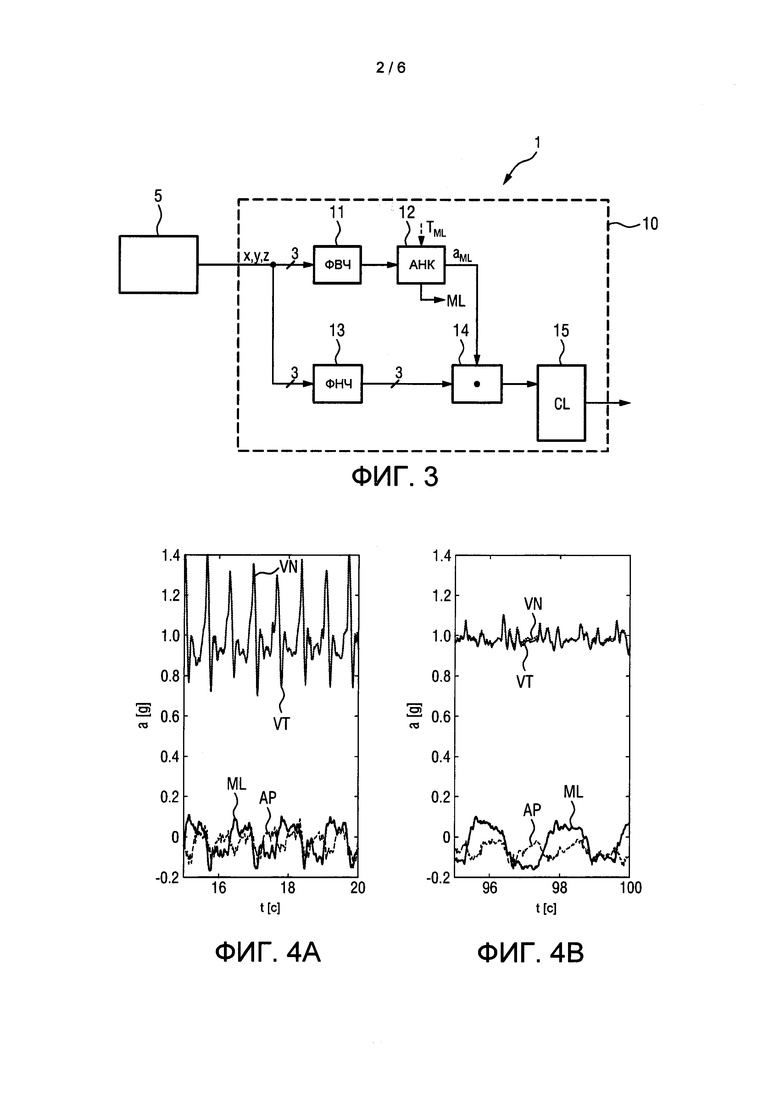
на ФИГ. 3 приведена схематическая диаграмма второго варианта реализации системы в соответствии с аспектом настоящего изобретения;
на ФИГ. 4А и 4В приведены диаграммы, иллюстрирующие акселерометрические данные, полученные с помощью трехосевого акселерометра, наложенного на туловище субъекта и совмещенного с осями тела субъекта, а также норма вектора для быстро ходящего субъекта и медленно ходящего субъекта, соответственно;
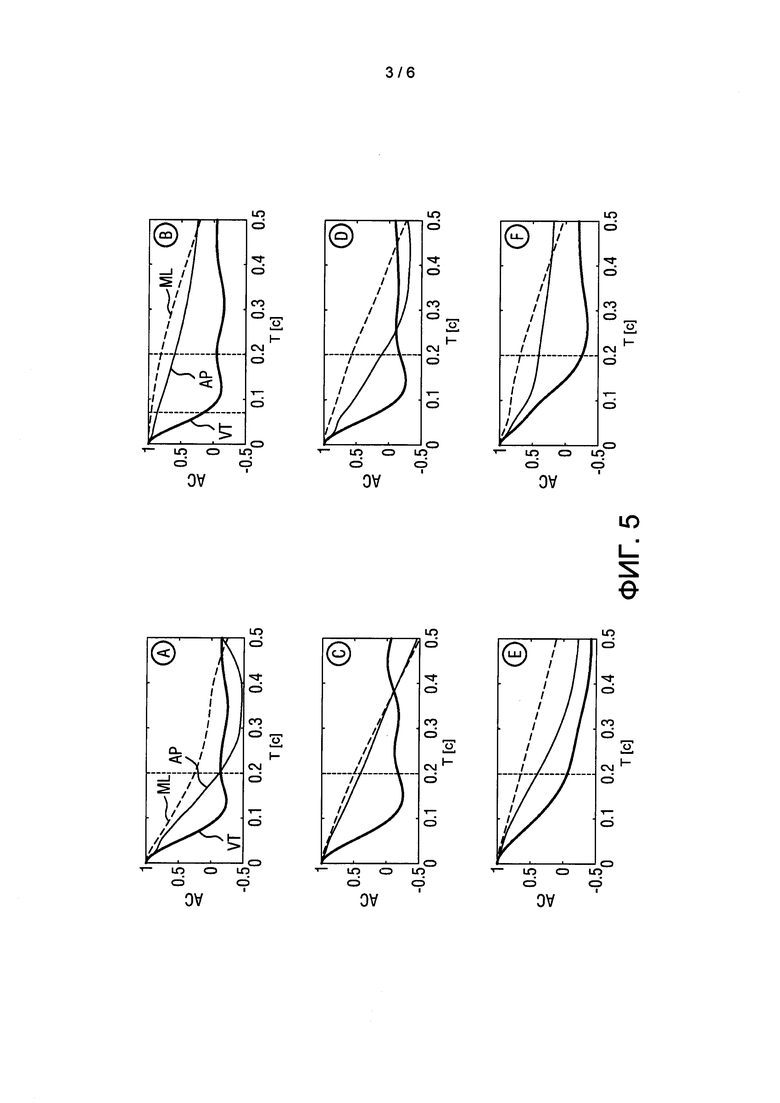
на ФИГ. 5 приведены примеры диаграмм автокорреляции различных ортогональных составляющих движения для различных типов передвижения;
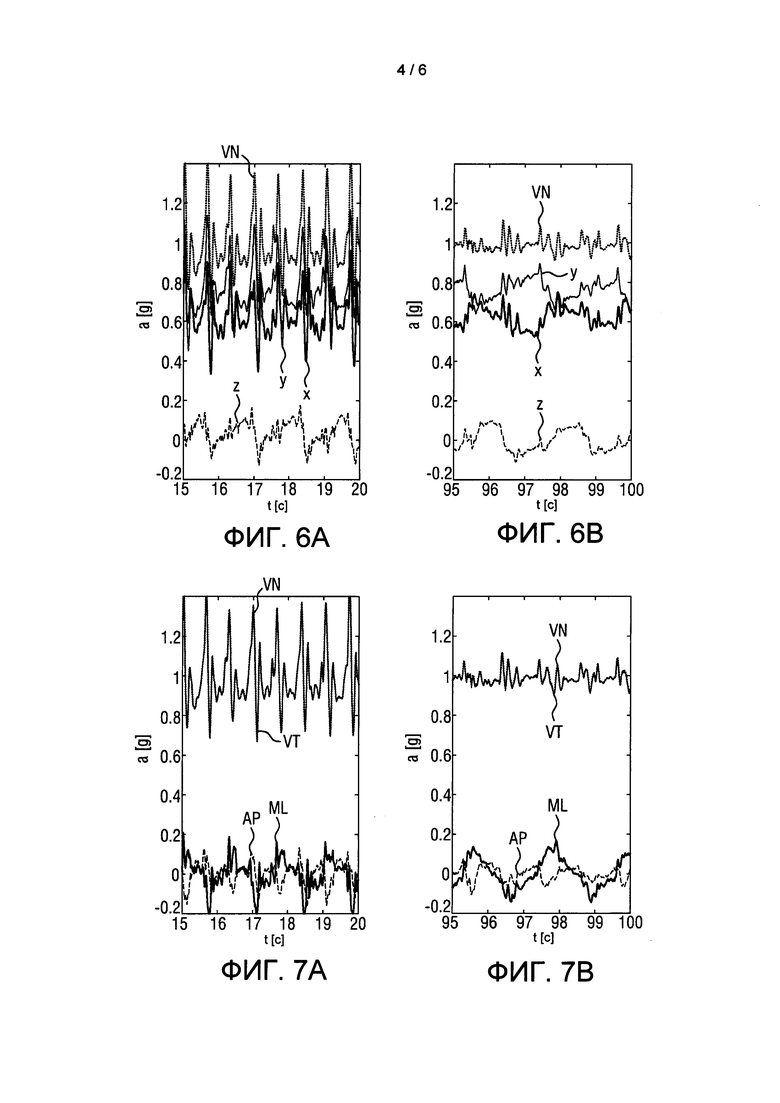
на ФИГ. 6А и 6В приведены диаграммы, иллюстрирующие акселерометрические данные, полученные с помощью трехосевого акселерометра, наложенного на туловище субъекта, но не совмещенного с осями тела субъекта, а также норма вектора для быстро ходящего и медленно ходящего субъекта, соответственно;
на ФИГ. 7А и 7В приведены диаграммы, иллюстрирующие сигналы, основанные на выделенных составляющих движения из отфильтрованных по высоким частотам акселерометрических данных для быстрой ходьбы и медленной ходьбы, соответственно;
на ФИГ. 8 приведены диаграммы выделенных ортогональных составляющих движения;
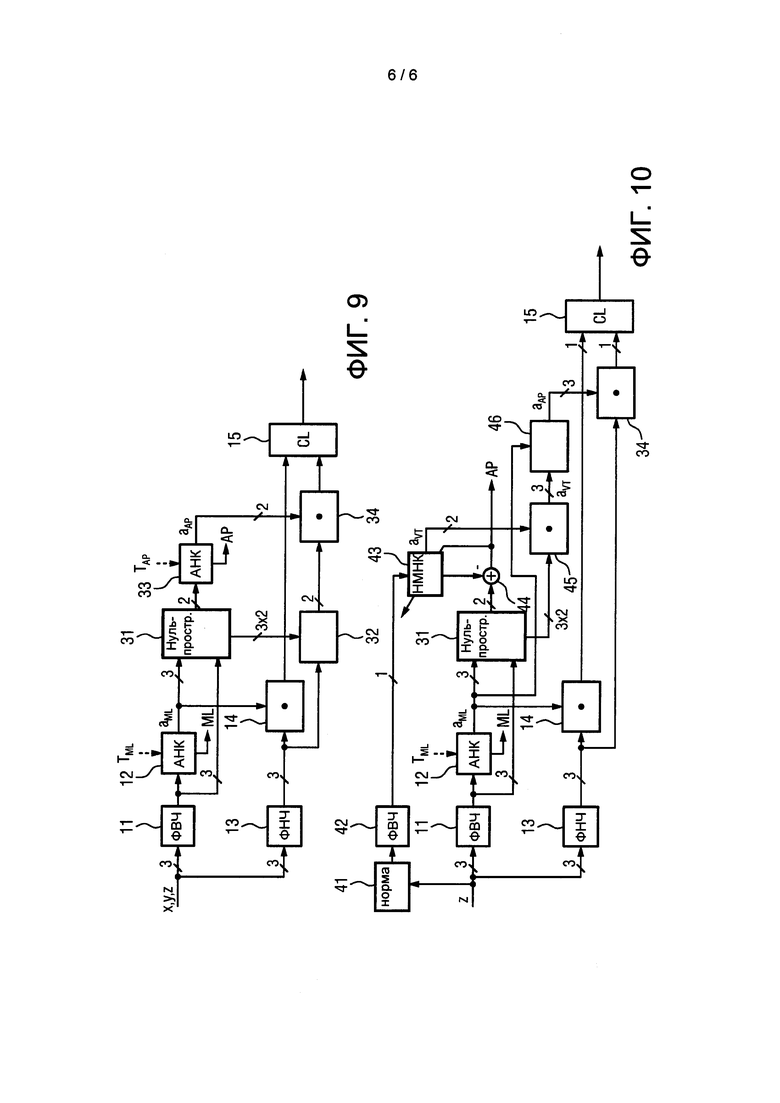
на ФИГ. 9 приведена схематическая диаграмма еще одного варианта реализации устройства в соответствии с аспектом настоящего изобретения; и
на ФИГ. 10 приведена схематическая диаграмма другого варианта реализации устройства в соответствии с аспектом настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0037] На ФИГ. 1 схематически показан первый вариант реализации системы 1 для определения передвижения субъекта 100 в соответствии с аспектом настоящего изобретения. Система 1 содержит акселерометр 5, выполненный с возможностью получения акселерометрических данных, указывающих на перемещение туловища субъекта 100. На их основе устройство 10 обработки может определять передвижение субъекта 100.
[0038] Как показано на неограничивающем примере по ФИГ. 1, система 1 может быть наложена в различных положениях P1, Р2, Р3 на торсе или туловище субъекта 100. Точные ориентация и положение системы 1, накладываемой субъектом 100, могут меняться, в частности потому, что устройство необязательно накладывается обученным медицинским специалистом, а может быть наложено самим субъектом. Другими словами, наложение или прикрепление системы 1, содержащей акселерометр 5, может быть выполнено без постороннего контроля. Субъект 100 может поместить систему в нескольких местах на туловище, таких как грудная клетка, бедро или поясница, и может даже каждый день выбирать разные места. В случае объединенного мониторинга ЭКГ и передвижения каждый день можно выбирать разные места, например P1, Р2 или Р3, во избежание или для уменьшения раздражения кожи, если устройство носят в течение длительного периода времени. То есть, невозможно всегда заранее предполагать, что система находится в определенном месте в известной ориентации.
[0039] Акселерометр 5 может быть реализован как многоосевой акселерометр, выполненный с возможностью формирования акселерометрических данных, указывающих на ускорение вдоль различных пространственных осей; далее будет рассматриваться трехосевой акселерометр, выполненный с возможностью формирования акселерометрических данных, указывающих на ускорение вдоль трех ортогональных пространственных осей. Примерами трехосевых акселерометров являются Bosch ВМА355, ST Microelectronics LIS3DSH, ST Microelectronics LIS344 ALH или Kionix KXM52. Следует подчеркнуть, что оси акселерометра или сенсорные оси x, у и z, необязательно совпадают с срединной-боковой (ML), вертикальной (VT) и передне-задней (АР) осями тела субъекта 100, так как акселерометр может быть наложен на туловище субъекта в произвольной ориентации и не в точно определенном месте.
[0040] Акселерометрические данные, указывающие на движение туловища субъекта, подаются в модуль 10 обработки для определения передвижения субъекта 100. Устройство 10 обработки выполнено с возможностью осуществления этапов, показанных на блок-схеме по ФИГ. 2, которые также описаны ниже.
[0041] В варианте реализации по ФИГ. 1, система 1 может дополнительно содержать интерфейс 6 и память 7. Интерфейс 6 может быть проводным или беспроводным интерфейсом. Преимуществом является то, что система 1 может быть устройством, питающимся от батареи, а интерфейс 6 является беспроводным интерфейсом, так что провода не требуются. Например, интерфейс 6 может предоставлять акселерометрические данные, получаемые акселерометром 5, и/или результат классификации модуля 10 обработки внешнему объекту.
[0042] Память 7 может хранить акселерометрические данные, указывающие на движение туловища субъекта 100, которые были получены акселерометром 5. В качестве альтернативы или дополнительно память 7 может быть некратковременным носителем, содержащим инструкции для исполнения устройством 10 обработки, причем инструкции обеспечивают осуществление устройством 10 обработки этапов способа, изложенных в настоящем документе, например, как описано со ссылкой на блок-схему по ФИГ. 2 и/или блок-схемы по ФИГ. 3, 9 или 10. В том случае, когда память 7 хранит акселерометрические данные, акселерометрические данные могут быть, например, полученными в течение некоторого периода времени, так что соединения с внешним объектом, таким как смартфон или монитор пациента, не требуется. Акселерометрические данные могут быть загружены по истечении требуемого периода измерения. Поэтому потребление энергии может быть дополнительно сокращено в виду отсутствия необходимости в связи, в частности беспроводной связи.
[0043] В альтернативном варианте реализации акселерометр 5 и устройство 10 обработки реализованы не в одном устройстве. Например, минимальная конфигурация из акселерометра 5 и интерфейса 6 может быть реализована в виде устройства, которое носит субъект 100.
Акселерометрические данные могут быть поэтому переданы посредством интерфейса 6 на устройство 10 обработки. Например, устройство 10 обработки может быть реализовано как часть монитора пациента или инфраструктуры здравоохранения, такой как больничная IT-система. Устройство 10 обработки или способ могут быть также реализованы в виде облачного решения. В другом варианте реализации устройством 10 обработки может служить смартфон или аналогичное устройство, выполненное с возможностью осуществления этапов для определения передвижения субъекта 100.
[0044] На ФИГ. 2 приведена блок-схема способа 20, включающего в себя этапы, выполняемые устройством 10 обработки в соответствии с аспектом настоящего изобретения. На первом этапе S21 могут быть получены, т.е. приняты или извлечены, акселерометрические данные, указывающие на движение туловища субъекта. Акселерометрические данные могут представлять собой последовательность векторов, где каждый вектор содержит компоненты x, у и z трехосевого акселерометра. На втором этапе S22A, S22B можно выделить по меньшей мере одну из множества ортогональных составляющих движения из отфильтрованных по верхним частотам акселерометрических данных. Таким образом, имеются первый подэтап S22A фильтрации высоких частот акселерометрических данных и второй подэтап S22B выделения по меньшей мере одной из множества ортогональных составляющих движения из отфильтрованных по верхним частотам акселерометрических данных. Второй подэтап может включать в себя выделение множества ортогональных составляющих движения из отфильтрованных по верхним частотам акселерометрических данных. Использование фильтра верхних частот приводит к тому, что акселерометрические данные не содержат усредненного вектора гравитации или гравитационной составляющей. Благодаря этому выделение по меньшей мере одной составляющей движения не имеет отклонения, основанного на предшествующем определении гравитационной составляющей. На третьем этапе S23A, S23B можно определить гравитационную составляющую из отфильтрованных по верхним частотам акселерометрических данных. Таким образом, имеются первый подэтап S23A фильтрации нижних частот акселерометрических данных и второй подэтап S23B определения гравитационной составляющей из отфильтрованных по нижним частотам данных. Второй этап S22A, S22B и третий этап S23A, S23B могут, необязательно, быть выполнены последовательно, параллельно или в другой последовательности. На четвертом этапе S24 можно сравнить направление по меньшей мере одной из упомянутых ортогональных составляющих движения с направлением гравитационной составляющей. На этой основе на пятом этапе S25 можно классифицировать движение субъекта как передвижение, если составляющая движения ортогональна или параллельна гравитационной составляющей. Сравнивать с гравитационной составляющей и использовать для классификации можно более одной составляющей движения.
[0045] Еще одно преимущество использования ортогональной составляющей движения во время передвижения может заключаться в том, что можно определить ориентацию акселерометра 5 относительно туловища субъекта 100. Например, ориентацию одной или более составляющих движения можно определить относительно сенсорных осей акселерометра. На этой основе акселерометрические данные могут быть откалиброваны, например, путем применения матрицы вращения, для получения откалиброванных акселерометрических данных. Такие откалиброванные акселерометрические данные могут обеспечивать ценную информацию, например, для надежного определения положения тела субъекта, например, находится ли субъект на левом или на правом боку, когда он лежит на кровати.
[0046] На ФИГ. 3 приведена схематическая диаграмма второго варианта реализации системы 1 в соответствии с аспектом настоящего изобретения. Система 1 содержит акселерометр 5 для получения акселерометрических данных, указывающих на движение туловища субъекта 100, и устройство 10 обработки для определения передвижения субъекта.
[0047] Устройство 10 обработки принимает акселерометрические данные в качестве входных данных. Акселерометрические данные содержат три отдельные компоненты, т.е. компоненты x, у и z, полученные с помощью трех сенсорных осей трехосевого акселерометра 5. Акселерометрические данные трех отдельных осей сначала подают на фильтр верхних частот (ФВЧ) 11. В неограничивающем варианте реализации по ФИГ. 3, три отфильтрованные по верхним частотам составляющие акселерометрических данных подают на модуль 12 анализа независимых компонент (АНК) для выделения по меньшей мере одной ортогональной составляющей движения на основе анализа независимых компонент в качестве метода разделения источников. В качестве выходных данных модуль 12 АНК может обеспечивать по меньшей мере одну из ортогональных составляющих движения. В показанном примере модуль 12 АНК выполнен с возможностью обеспечения срединно-боковой оси aML, указывающей направление срединно-боковой составляющей движения, в качестве выходных данных. Модуль 12 АНК может, необязательно, быть дополнительно выполнен с возможностью обеспечения данных ML срединно-бокового ускорения в направлении срединно-боковой оси, называемых также сигналом ML, в качестве дополнительных выходных данных. Модуль 12 АНК может обеспечивать возможность выделения составляющей сигнала с самой низкой собственной частотой путем определения запаздывания по времени Т, подаваемого на вход. В показанном примере запаздывание по времени TML составляющей движения ML может быть установлено, например, на 200 мс. Модуль 12 АНК может определять составляющую движения ML путем максимального увеличения нормализованной автокорреляции при установленном запаздывании по времени. В результате выделяется сигнал ML или сигнал в боковом направлении и дополнительно обеспечивается ось ML в качестве идентификации оси в боковом направлении.
[0049] Параллельно фильтрации верхних частот (недоработанные) акселерометрические данные подают на фильтр нижних частот (ФНЧ) 13 для определения гравитационной составляющей. Таким образом, гравитационная составляющая может быть просто определена путем фильтрации нижних частот или сглаживания акселерометрических данных с помощью ФНЧ, имеющего достаточно низкую частоту среза, или, равносильно, путем усреднения акселерометрических данных за достаточно продолжительный период времени, например за несколько секунд. В результате получают направление гравитационной составляющей.
[0049] В варианте реализации по ФИГ. 3, направление составляющей ML сравнивают с направлением гравитационной составляющей или вектором гравитации путем вычисления скалярного произведения с помощью модуля 14 сравнения. Скалярное произведение идентифицированной оси ML с направлением вектора гравитации должно быть близким к нулю в случае ходьбы, так как ось ML должна быть перпендикулярна сагиттальной плоскости. Следовательно, выходные данные модуля 14 сравнения могут быть поданы в качестве входных данных в классификатор (CL) 15. Таким образом движение субъекта может быть классифицировано как перемещение, если составляющая ML ортогональна гравитационной составляющей.
[0050] В данном примере составляющую движения можно считать ортогональной гравитационной составляющей, если абсолютное значение скалярного произведения составляющей движения и гравитационной составляющей ниже заданного порога.
[0051] На ФИГ. 4А и 4В приведены диаграммы, иллюстрирующие акселерометрические данные, полученные с помощью трехосевого акселерометра, наложенного на туловище субъекта, а также норма вектора (VN) для быстро ходящего субъекта и медленно ходящего субъекта, соответственно. Горизонтальная ось показывает запаздывание по времени t в секундах [с], а вертикальная ось показывает измеренное ускорение в [g]. Для иллюстрации оси акселерометра в данном примере совмещены с осями тела субъекта, где ось х ~ ML, ось у ~ VT и ось z ~ АР. Таким образом, кривые, показанные на ФИГ. 4А и 4В, соответствуют трем ортогональным составляющим движения: (1) срединно-боковой (ML), (2) передне-задней (АР) и (3) вертикальной (VT). Пунктирные кривые показывают норму вектора (VN), вычисленную следующим образом:

[0052] Как показано на ФИГ. 4А и 4В, норма вектора почти равна составляющей VT. При разложении акселерометрических данных на гравитационную составляющую (= 1 g) и инерциальные составляющие, как известно, инерционные составляющие, ортогональные вектору гравитации, ослаблены в норме вектора, тогда как инерционные составляющие, одинаково направленные с вектором гравитации, усилены в норме вектора. Кроме того, на ФИГ. 4А и 4В можно увидеть, что большие составляющие ML, которые могут возникать в результате вращений датчика, в норме вектора уже не видны. Это можно объяснить тем, что составляющая вектора гравитации распределяется по всем ортогональным составляющим таким образом, что норма вектора остается одной и той же, и представляет собой составляющую гравитационного ускорения плюс инерционные ускорения, измеряемые в основном в направлении, перпендикулярном вектору гравитации.
[0053] Следует отметить, что обнаружение шагов на основе нормы вектора часто используют в традиционных подходах. Преимущество этого подхода состоит в том, что обнаружение шагов на основе нормы вектора не зависит от вращения. Обнаружение шагов на основе нормы вектора хорошо работает в случае быстрой ходьбы. Как показано на ФИГ. 4А, вертикальная (VT) составляющая, которая почти равна норме вектора, сильная в случае быстрой ходьбы, и отдельные шаги могут быть четко идентифицированы. На ФИГ. 4В на кривой продолжительностью 5 секунд можно идентифицировать 8 шагов. Эти 8 шагов равносильны 4 крупным сдвигам, которые видны на составляющей ML.
[0054] С другой стороны, было установлено, что получающийся в результате сигнал VN довольно слабый в случае медленной ходьбы, как показано на ФИГ. 4В. Кроме того, отдельные шаги не могут быть четко идентифицированы. Поэтому в описанном в настоящем документе решении, в частности, для обнаружения шагов рекомендуется использовать составляющие ML и АР. Было установлено, что это может привести к более устойчивому к ошибкам обнаружению шагов в случае медленной ходьбы или медленного передвижения субъекта. Как можно увидеть на ФИГ. 4В, срединно-боковая (слева направо) и передне-задняя (спереди назад) составляющие движения могут быть четко идентифицированы. На ФИГ. 4В составляющая ML наиболее сильная, и на кривой продолжительностью 5 секунд можно идентифицировать примерно 2  крупных сдвига, соответствующих 5 шагам.
крупных сдвига, соответствующих 5 шагам.
[0055] Составляющая ML имеет собственную частоту, которая обычно равна половине собственной частоты составляющих VT и АР из-за латерального/бокового перемещения туловища при каждом последующем шаге левой/правой ногой. Кроме того, составляющая АР имеет ту же собственную частоту, что и составляющая VT, но имеет другую временную структуру. Составляющая VT демонстрирует при каждом шаге ряд «скачков», где время непосредственно перед наибольшим скачком отражает время постановки ноги на пятку, а «впадина» сразу после наибольшего скачка отражает время отрыва носка ноги. С другой стороны, составляющая АР имеет пилообразную структуру. Линейно изменяющийся сигнал сбрасывается до минимального значения и затем снова нарастает во время отрыва носка ноги. Было установлено, что такие общие временные характеристики могут наблюдаться как при медленной, так и при быстрой ходьбе, хотя форма и величины могут отличаться. Например, составляющая VT значительно меньше преобладает в случае медленной ходьбы.
[0056] Поэтому рекомендуется выделять одну или более различных ортогональных составляющих движения, в данном случае три составляющие VT, АР и ML, из отфильтрованных по верхним частотам акселерометрических данных с помощью методов выделения источников. Методы выделения источников могут быть основаны на понятии линейной предсказуемости. В данном походе предполагается, что сигналы источника обладают некоторой временной структурой. Например, источники имеют разные (нормализованные) функции автокорреляции или, равносильно, имеют разные (нормализованные) спектральные формы. С интуитивной точки зрения сложность сигналов источника меньше, чем у смешанных сигналов датчика. Другими словами, степень временной предсказуемости любого сигнала источника выше, чем (или равна) степени предсказуемости любой комбинации. Например, формы сигнала комбинации двух синусоид с различными частотами более сложные или менее предсказуемые, чем у любой из двух исходных синусоид. Примеры эффективно использующих память и недорогих итеративных структур для разделения источников описаны в вышеупомянутой обзорной статье Choi и др.
[0057] На ФИГ. 5 приведены примеры диаграмм автокорреляции трех ортогональных составляющих движения для различных типов перемещения: А) быстрая ходьба, В) медленная ходьба, С) асимметричная ходьба, D) неровная ходьба, Е) подъем по лестнице и F) спуск по лестнице. Горизонтальная ось показывает запаздывание по времени Т в секундах [с], а вертикальная ось показывает нормализованный (единица при задержке равной 0) коэффициент автокорреляции (АС).
[0058] Как показано на ФИГ. 5, составляющая ML демонстрирует наивысшую автокорреляцию, например, при запаздывании по времени 200 мс, как указано вертикальной пунктирной линией. Поэтому составляющую ML можно выделить путем настройки алгоритма разделения источников на выделение, то есть отделение, составляющей ML в качестве требуемого источника из других источников при помощи максимального увеличения коэффициента автокорреляции при заданном запаздывании по времени, в данном случае 200 мс. Затем выделенную составляющую ML можно использовать для обнаружения шагов при медленной ходьбе, так как другие ортогональные составляющие (VT и АР) очень слабые, когда люди ходят медленно, как показано на ФИГ. 4В.
[0059] На ФИГ. 6А и 6В приведены диаграммы, иллюстрирующие акселерометрические данные, полученные с помощью трехосевого акселерометра, наложенного на туловище субъекта, а также норма вектора для быстро ходящего и медленно ходящего субъекта, соответственно. Горизонтальная ось и в этом случае показывает запаздывание по времени t в секундах [с], а вертикальная ось показывает измеренное ускорение в [g]. В отличие от ФИГ. 4А и 4В оси акселерометра на ФИГ. 6А и 6В не совмещены с осями тела субъекта. Для объективности сравнения на ФИГ. 4А и 4В использованы одни и те же данные, но при повернутой системе координат. Это соответствует ситуации, когда акселерометр накладывают в произвольной ориентации, т.е. не совмещают с осями тела субъекта.
[0060] Сравнивая ФИГ. 6А и 6В с ФИГ. 4А и 4В, можно заметить, что норма вектора одна и та же в обоих случаях.
[0061] Показанные на ФИГ. 6А и 6В акселерометрические данные, которые получены при помощи произвольно ориентированного акселерометра, могут быть поданы в качестве входных данных в модуль 10 обработки, как, например, описано со ссылкой на ФИГ. 3 или позже со ссылкой на ФИГ. 9 и 10. В частности, срединно-боковая составляющая движения может быть выделена на основе отфильтрованных по верхним частотам акселерометрических данных x, у и z путем выбора подходящего запаздывания по времени автокорреляции, как описано выше.
[0062] На основе первой выделенной составляющей, такой как составляющая ML, можно определить плоскость, перпендикулярную первой составляющей, которая является сагиттальной плоскостью. В этом примере сагиттальная плоскость содержит комбинацию остальных ортогональных составляющих, в данном случае VT и АР. Эти составляющие могут быть выделены с помощью аналогичного алгоритма разделения источников, но с двумерными векторами в качестве входных данных и с использованием другого запаздывания по времени. Из функций автокорреляции, изображенных на ФИГ. 5, следует, что для разделения составляющих VT и АР целесообразно использовать меньшее запаздывание по времени для выделения. Следовательно, можно использовать метод понижения порядка. Выделение можно начать с комбинации 3 источников. Выделяют первый источник, например составляющую ML. На этой основе размерность можно уменьшить до комбинации двух источников и применить аналогичный метод разделения источников, чтобы выделить второй источник, например составляющую АР. В итоге останется третий источник (ортогональный двум другим источникам). Таким образом, метод понижения порядка можно рассматривать как поэтапный подход к поиску ортогональных составляющих. В данном примере два этапа. Первый этап заключается в выделении составляющей ML из трехосевых акселерометрических данных. После этой идентификации составляющей ML получают подпространство, ортогональное составляющей ML (которое в идеале содержит только составляющие АР и VT). Затем на втором этапе из этого двумерного подпространства выделяют составляющую АР. В остатке получают составляющую VT. Результат применения этого разделения источников для выделения составляющих ML, АР и VT из произвольно ориентированных акселерометрических данных, изображенных на ФИГ. 6А и 6В, показан на. 7А и 7В.
[0063] При сравнении ФИГ. 7А и 7В с ФИГ. 4А и 4В, где оси акселерометра тщательно совмещены с осями ML, АР и VT, можно заметить, что источники выделены с хорошим соответствием при помощи метода разделения источников путем понижения порядка с использованием временной структуры. В неограничивающем примере, показанном в настоящем документе, для выделения составляющей ML используют запаздывание по времени 200 мс, тогда как для выделения составляющей АР используют запаздывание по времени 75 мс.
[0064] Следует понимать, что неопределенность знака при выделении источника может быть устранена за счет, например, использования указания по эксплуатации и/или использования предварительной информации. Например, в случае объединенного мониторинга ЭКГ и передвижения требуется, чтобы устройство носили на груди. Кроме того, можно использовать предварительную информацию об ориентации акселерометра относительно клейкой стороны наклейки. В качестве другого примера, который показан на ФИГ. 1, акселерометр обычно лишь слегка поворачивают вокруг осей в коронарной плоскости, и на основе этого можно получить знак составляющей АР. Кроме того, составляющая VT должна иметь положительную корреляцию с нормой вектора (VN) (у которой удалена составляющая постоянного тока). Если правильные знаки составляющих АР и VT известны, и система координат трехосевого акселерометрического датчика известна, то можно также получить знак составляющей ML. Таким образом, можно определить, принадлежит ли конкретный переход через нуль составляющей ML шагу левой ногой или шагу правой ногой.
[0065] Чтобы определить передвижение субъекта, можно сравнить направление по меньшей мере одной выделенной составляющей движения в отфильтрованных по верхним частотам необработанных акселерометрических данных с направлением гравитационной составляющей, вычисленной с помощью отфильтрованных по нижним частотам акселерометрических данных, например в виде усредненной VN. Если направление по меньшей мере одной составляющей ортогонально или параллельно вектору гравитации, показание акселерометра можно классифицировать как передвижение, но если направление по меньшей мере одной составляющей по существу ни ортогонально, ни параллельно гравитационной составляющей, показание акселерометра можно классифицировать как не передвижение.
[0066] Необязательно, после того, как показание акселерометра классифицировано как передвижение, одну или более выделенных ортогональных составляющих можно использовать для идентификации отдельных шагов во время передвижения. Например, переход через нуль при возрастании и понижении составляющих ML можно использовать для вычисления количества шагов, или можно идентифицировать впадины в составляющей АР, предпочтительно отфильтрованной по нижним частотам или интегрированной составляющей АР, чтобы точно определить момент постановки ноги на пятку, когда скорость падает из-за постановки ноги на пятку. В варианте реализации для получения скорости составляющей ускорения АР можно использовать интегрирование в составляющей АР. Кроме того, на основе одной или более из трех ортогональных составляющих можно вычислять другие особенности походки. Например, можно определять длину шага при помощи составляющей АР или посредством модели перевернутого маятника, использующей составляющую VT.
[0067] На ФИГ. 8 показаны примеры диаграмм выделенных ортогональных составляющих движения для медленно ходящего субъекта, движущегося со скоростью 0,5 м/с. Горизонтальная ось показывает запаздывание по времени t в секундах [с], а вертикальная ось показывает измеренное ускорение в [мg]. Верхний график относится к срединно-боковой (ML) составляющей, средний график относится к передне-задней (АР) составляющей, а нижний график относится к вертикальной (VT) составляющей.
[0068] Верхний график на ФИГ. 8 показывает кривую срединно-боковой составляющей после сглаживания или фильтрации нижних частот, обозначенную как ML_LP. Для распознания отдельных шагов можно оценить переходы через нуль ML_LP. В качестве альтернативы или дополнительно для распознания отдельных шагов можно оценить впадины, например, составляющей АР, предпочтительно после сглаживания или интегрирования первого порядка. Необязательно, отдельные шаги левой ногой и правой ногой можно распознать на основе переходов через нуль при возрастании и понижении, эффективно после сглаживания на основе ML_LP. Примеры шагов левой ногой и правой ногой указаны буквами L и R на верхнем графике по ФИГ. 8.
[0069] На ФИГ. 9 приведена схематическая диаграмма еще одного варианта реализации устройства 10 в соответствии с аспектом настоящего изобретения. Поскольку этот вариант реализации основан на устройстве 10, которое описано со ссылкой на ФИГ. 3, далее будут описаны только отличия и/или дополнительные аспекты.
[0070] После того, как распознана первая составляющая движения, в данном случае составляющая ML, с использованием модуля 12 анализа независимых компонент (АНК), можно использовать этап понижения размерности или понижения порядка, чтобы найти одну или более дальнейших составляющих движения, указывающих на передвижение субъекта (в данном случае VT и АР).
[0071] Понижение порядка может включать в себя блок 31 нулевого пространства, выполненный с возможностью приема оси первой составляющей движения, в данном случае aML, и отфильтрованные по верхним частотам акселерометрические данные в качестве входных данных. Блок 31 нулевого пространства может содержать два выхода. Первый выход может быть двумерным выходом, представляющий собой сигнал подпространства, который больше не содержит первой составляющей движения. Другими словами, он содержит сигнал подпространства, соответствующего нулевому пространству первой составляющей движения. Другими словами, первая составляющая движения может быть удалена посредством проекции/понижения порядка. В результате остается 1-мерное нулевое пространство в 3-мерном пространстве. Блок 31 нулевого пространства может выполнять понижение размерности и удаляет нулевое пространство (которое в данном примере является направлением ML), что приводит к 2-мерному пространству сигнала, называемому также подпространством. Следовательно, на основе отфильтрованных по верхним частотам акселерометрических данных и первой составляющей движения можно определить двумерное подпространство, ортогональное первой составляющей движения. На этой основе аналогично определению первой составляющей движения с помощью первого модуля 12 АНК можно выделить вторую составляющую движения на основе данного подпространства. Другие подходы будут описаны со ссылкой на ФИГ. 9 и ФИГ. 10.
[0072] В варианте реализации по ФИГ. 9, вторую составляющую движения, в данном случае составляющую АР, выделяют методом разделения источников, например с помощью второго модуля 33 анализа независимых компонент (АНК). Поскольку функция автокорреляции составляющей VT менее широкая по сравнению с составляющей АР, как показано на ФИГ. 5, можно применять аналогичный АНК, как описано со ссылкой на ФИГ. 3, но теперь основанный на двумерном подпространстве и указании другого запаздывания по времени. В данном примере время TAP настроено на 75 мс для выделения сигнала АР. Поэтому второй модуль 33 АНК обеспечивает ось АР aAP и акселерометрические данные вдоль передне-задней оси АР в качестве выходных данных. Ось АР может быть подана в качестве первых входных данных во второй модуль 34 сравнения. Следует понимать, что модуль сравнения может определять, например, скалярное произведение, векторное произведение или внутреннее произведение, или, в более общем смысле, значение признака, которое может быть использовано в классификаторе для классификации движения субъекта как передвижение, например, путем сравнения значения признака с одним или более пороговых значений.
[0073] Второй выход блока нулевого пространства может быть матрицей 3×2, которая определяет подпространство с помощью двух трехмерных векторов. Эту матрицу 3×2 можно использовать в последующем блоке 32 обработки для вычисления другого сигнала подпространства. Как объяснялось выше, первая составляющая движения, которая уже выделена или определена, может быть поэтому удалена посредством проекции или понижения порядка. Блок 32 обработки может принимать матрицу 3×2 в качестве первых входных данных и отфильтрованные по нижним частотам акселерометрические данные, предоставляемые фильтром 13 нижних частот, в качестве вторых входных данных и на их основе вычислять произведение векторов. Следовательно, проекция акселерометрических данных на подпространство может быть выполнена как для сигнала ФВЧ, так и для сигнала ФНЧ. Выход блока 32 обработки подают в качестве вторых входных данных во второй модуль 34 сравнения.
[0074] В варианте реализации по ФИГ. 9, направление составляющей АР может быть опять сравнено с направлением гравитационной составляющей путем вычисления скалярного произведения с помощью модуля 34 сравнения. Выход модуля 32 обработки можно рассматривать как проекцию гравитационной составляющей в поперечной плоскости. Выход второго модуля 34 можно использовать в качестве вторых входных данных модуля 15 классификатора для классификации движения субъекта как передвижение, как объяснялось выше со ссылкой на ФИГ. 3.
[0075] на ФИГ. 10 приведена схематическая диаграмма другого варианта реализации устройства в соответствии с аспектом настоящего изобретения. Поскольку этот вариант реализации основан на устройстве 10, которое описано со ссылкой на ФИГ. 3 и/или ФИГ. 9, далее будут описаны только отличия и/или дополнительные аспекты. Данный вариант реализации описывает альтернативный подход к выделению второй составляющей движения, в данном случае составляющей АР и/или VT.
[0076] В случае варианта реализации по ФИГ. 10, выделение срединно-боковой составляющей может быть таким же, как и в предыдущих вариантах реализации. Кроме того, модуль 10 обработки может быть выполнен с возможностью выделения первой составляющей движения на основе метода разделения источников; определения на основе отфильтрованных по верхним частотам акселерометрических данных и первой составляющей движения двухмерного подпространства, ортогонального первой составляющей движения, аналогично варианту реализации, описанному со ссылкой на ФИГ. 9. Однако в качестве альтернативы второй стадии АНК модуль 10 обработки может быть выполнен с возможностью выделения второй составляющей движения на основе подпространства и отфильтрованной по верхним частотам нормы или нормы вектора акселерометрических данных. В блоке 41 вычисляют норму вектора акселерометрических данных и подают ее на фильтр верхних частот (ФВЧ) 42. Отфильтрованную по верхним частотам норму акселерометрических данных можно использовать в качестве опорного сигнала для выделения вертикальной составляющей из акселерометрических данных.
[0077] На этой основе можно использовать метод НМНК (нормализованный метод наименьших квадратов) в блоке 43 для поиска корреляции между отфильтрованной по верхним частотам нормой и отфильтрованными по верхним частотам акселерометрическими данными или выходными данными блока 31 нулевого пространства, отражающими отфильтрованные по верхним частотам акселерометрические данные без составляющей ML. Причина наличия корреляции нормы акселерометрических данных с вертикальной составляющей акселерометрических данных состоит в том, что норма (без фильтра верхних частот) содержит большую гравитационную составляющую. Из-за этого все ускорения, ортогональные вектору гравитации, подавлены в норме. Составляющую VT можно найти путем максимального увеличения корреляции. В качестве выходных данных блока 43 НМНК можно предоставить ось составляющей VT, aVT. На основе операции вычитания в блоке 44 можно получить акселерометрические данные АР.
[0078] Другими словами, блок НМНК, изображенный на ФИГ. 10, может принимать опорный сигнал, например отфильтрованную по верхним частотам норму вектора, а также подпространство, предоставляемое блоком нулевого пространства, которое в идеале содержит отфильтрованные по верхним частотам данных ускорения АР и VT. На этой основе блок НМНК может выполнять корреляцию так, что в этом подпространстве может быть определено направление VT. Остальной сигнал, предоставленный блоком 43 НМНК после вычитания ускорения VT, может содержать данные ускорения АР, как показано на ФИГ. 10.
[0079] После выделения (определения) составляющей VT в двумерном подпространстве, например, с помощью НМНК, можно вычислить составляющую VT в трехмерном подпространстве посредством векторно-матричного произведения направления в двумерном подпространстве и матрицы 3×2 нулевого пространства в блоке 31. После этого можно определить направление АР путем вычисления векторного произведения компонент VT и ML. В более общем смысле, третью ортогональную составляющую движения можно определить на основе векторного произведения первой ортогональной составляющей движения и второй ортогональной составляющей движения.
[0080] В альтернативном варианте реализации в блоке 45 можно вычислять векторно-матричное произведение матрицы 3×2, предоставляемой блоком 31 нулевого пространства, и оси VT, aVT. Следует понимать, что выход блока 43 может представлять направление VT, аут, в двумерном подпространстве. Выход блока 45 векторно-матричного произведения может представлять направление VT, aVT, в трехмерном пространстве. На этой основе можно вычислить векторное произведение с осью составляющей ML, aML, в блоке 46. Выход этого блока дает ось составляющей АР, aAP, которую затем можно подать во второй модуль 34 сравнения для сравнения с направлением гравитационной составляющей. В показанном варианте реализации в качестве выхода фильтра нижних частот (ФНЧ) 13 можно опять обеспечить гравитационную составляющую.
[0081] Этап классификации варианта реализации по ФИГ. 10, и в этом случае может быть аналогичным предыдущему варианту реализации. Классификатор 15 может проверять, являются ли направления определенных составляющих ML и/или АР ортогональными направлению гравитационной составляющей, чтобы классифицировать движение субъекта как передвижение.
[0082] Преимущество решения по ФИГ. 10 над решением по ФИГ. 9 может состоять в дальнейшем улучшении устойчивости к ошибкам. Таким образом, данный вариант реализации учитывает, что различия в нормализованной автокорреляции между составляющими VT и АР менее выражены, чем различия в нормализованной автокорреляции между составляющими ML и АР либо VT, как показано на ФИГ. 5. Следовательно, в качестве альтернативы или дополнительно к подходу с двухэтапным АНК, изображенным на ФИГ. 9, можно использовать НМНК (и норму вектора VN).
[0083] И наконец, решение, предложенное в настоящем документе, в частности, выделение составляющей ML из отфильтрованных по (только) верхним частотам акселерометрических данных, сравнение направления составляющей ML с направлением гравитационной составляющей и классификация на этой основе движения субъекта как передвижение, обеспечивает возможность надежного определения передвижения субъекта, в частности, для медленно передвигающихся субъектов. Это может оказаться полезным при получении контекстной информации для измерения показателей жизненно важных функций больных и/или пожилых людей.
[0084] Хотя изобретение проиллюстрировано и описано в подробностях на чертежах и в вышеизложенном описании, такие иллюстрации и описание нужно считать приведенными в качестве иллюстрации или примера, но не ограничивающими объем изобретения; настоящее изобретение не ограничено описанными вариантами реализации. При использовании на практике данного заявленного изобретения, изучении чертежей, описания и приложенной формулы изобретения специалистами в данной области могут быть придуманы и осуществлены другие изменения к описанным вариантам реализации
[0085] В формуле изобретения слово «содержащий/включающий в себя» не исключает другие элементы или этапы, а грамматические средства выражения единственного числа не исключают множественного числа. Единственный элемент или иной модуль может выполнять функции нескольких пунктов, перечисленных в формуле изобретения. Сам факт того, что определенные меры изложены во взаимно отличающихся различных пунктах формулы, не означает того, комбинация этих мер не может быть эффективно использована.
[0086] Компьютерная программа может храниться/распространяться на подходящем некратковременном носителе, таком как оптический носитель или твердотельный, поставляемый вместе с другим оборудованием или как его часть, но может также распространяться в других видах, например, через Интернет или другие проводные или беспроводные системы связи.
Никакие ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ | 2010 |
|
RU2546407C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ И/ИЛИ МОНИТОРИНГА ДЫХАТЕЛЬНОГО УСИЛИЯ СУБЪЕКТА | 2016 |
|
RU2720668C2 |
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРИЧЕСКОГО ТРЕХОСЕВОГО ИНКЛИНОМЕТРА | 2014 |
|
RU2577806C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИОННОГО ДАТЧИКА, УСТАНОВЛЕННОГО В ПРОИЗВОЛЬНОЙ ПОЗИЦИИ НА БОРТУ ТРАНСПОРТНОГО СРЕДСТВА, И СИСТЕМА ДАТЧИКОВ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ УСТАНОВКИ НА БОРТУ В ПРОИЗВОЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2591018C2 |
| МОНИТОРИНГ СИГНАЛОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА ВО ВРЕМЯ ДВИЖЕНИЯ | 2011 |
|
RU2580893C2 |
| УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЙ ТЕЛА, СПОСОБ ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЙ ТЕЛА И ПРОГРАММА ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЙ ТЕЛА | 2007 |
|
RU2442534C2 |
| Устройство, способ и система для подсчета количества циклов периодического движения субъекта | 2015 |
|
RU2719945C2 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| РАДИОВОЛНОВОЙ ДОПЛЕРОВСКИЙ ОБНАРУЖИТЕЛЬ | 2015 |
|
RU2610146C1 |

Группа изобретений относится к медицине, а именно к способу определения передвижения субъекта. Предложена система, включающая машиночитаемый носитель, а также устройство для реализации способа, содержащая акселерометр для получения акселерометрических данных, указывающих на движение туловища субъекта; и устройство обработки для определения передвижения субъекта. Причем устройство выполнено с возможностью осуществления следующих этапов: получение акселерометрических данных, указывающих на движение туловища субъекта; выполнение фильтрации верхних частот на акселерометрических данных для получения отфильтрованных по верхним частотам акселерометрических данных; выделение по меньшей мере одной из ортогональных составляющих движения из отфильтрованных по верхним частотам данных акселерометра с использованием метода разделения источников; выполнение фильтрации нижних частот на акселерометрических данных для получения отфильтрованных по нижним частотам данных акселерометра; определение гравитационной составляющей из отфильтрованных по верхним частотам данных акселерометра; сравнение направления по меньшей мере одной из указанных ортогональных составляющих движения с направлением гравитационной составляющей и классифицирование движения субъекта как передвижение, если составляющая движения ортогональна или параллельна гравитационной составляющей. Группа изобретений обеспечивает возможность точного определения передвижения субъекта, в частности при очень медленной ходьбе субъекта. 4 н. и 11 з.п. ф-лы, 13 ил.
1. Устройство (10) обработки для определения передвижения субъекта (100), выполненное с возможностью осуществления следующих этапов:
получение акселерометрических данных, указывающих на движение туловища субъекта (S21);
выполнение фильтрации верхних частот на акселерометрических данных для получения отфильтрованных по верхним частотам акселерометрических данных;
выделение (S22B) по меньшей мере одной из ортогональных составляющих движения из отфильтрованных по верхним частотам данных акселерометра с использованием метода разделения источников;
выполнение фильтрации нижних частот на акселерометрических данных для получения отфильтрованных по нижним частотам данных акселерометра;
определение гравитационной составляющей из отфильтрованных по нижним частотам данных акселерометра (S23B);
сравнение направления по меньшей мере одной из указанных ортогональных составляющих движения с направлением гравитационной составляющей (S24) и
классифицирование движения субъекта как передвижение, если составляющая движения ортогональна или параллельна гравитационной составляющей (S25).
2. Устройство обработки по п. 1, выполненное с возможностью выделения срединно-боковой (ML) и/или передне-задней (AP) составляющей движения из отфильтрованных по верхним частотам данных акселерометра.
3. Устройство обработки по п. 1, в котором метод разделения источников основан на одном или более из: линейной предсказуемости, слепого разделения источников (СРИ) и/или анализа независимых компонент (АНК).
4. Устройство обработки по п. 1, в котором метод разделения источников обеспечивает возможность разделения по меньшей мере одной из указанных ортогональных составляющих движения на основе их временной структуры, в частности, путем увеличения автокорреляции при заданном запаздывании по времени.
5. Устройство обработки по п. 4, в котором метод разделения источников обеспечивает возможность максимального увеличения автокорреляции при заданном запаздывании по времени.
6. Устройство обработки по п. 4,
выполненное с возможностью выделения первой ортогональной составляющей движения на основе метода разделения источников, который обеспечивает возможность максимального увеличения автокорреляции при первом заданном запаздывании по времени; а также
выполненное с возможностью выделения второй ортогональной составляющей движения на основе метода разделения источников, который обеспечивает возможность максимального увеличения автокорреляции при втором заданном запаздывании по времени.
7. Устройство обработки по п. 1, в котором этап выделения по меньшей мере одной из ортогональных составляющих движения включает:
выделение первой составляющей движения на основе метода разделения источников;
определение на основе отфильтрованных по верхним частотам акселерометрических данных и первой составляющей движения двумерного подпространства, ортогонального первой составляющей движения; и
выделение второй составляющей движения на основе указанного подпространства.
8. Устройство обработки по п. 7, выполненное с возможностью выделения второй составляющей движения на основе указанного подпространства и отфильтрованной по верхним частотам нормы акселерометрических данных.
9. Устройство обработки по п. 1, в котором на этапе классифицирования движения субъекта как передвижение составляющую движения считают ортогональной гравитационной составляющей, если абсолютное значение скалярного произведения составляющей движения и гравитационной составляющей ниже заданного порога.
10. Устройство обработки по п. 1, дополнительно выполненное с возможностью выполнения этапа калибровки акселерометрических данных на основе указанной по меньшей мере одной выделенной ортогональной составляющей движения.
11. Устройство обработки по п. 1, дополнительно выполненное с возможностью выполнения этапа идентификации отдельных шагов и/или определения параметра походки во время передвижения на основе указанной по меньшей мере одной выделенной ортогональной составляющей движения.
12. Устройство обработки по п. 11, выполненное с возможностью идентификации отдельных шагов левой ногой и правой ногой на основе переходов через нуль при возрастании и понижении срединно-боковой составляющей и/или на основе впадин в вертикальной или передне-задней составляющей движения.
13. Система (1) для определения передвижения субъекта, содержащая:
акселерометр (5) для получения акселерометрических данных, указывающих на движение туловища субъекта; и
устройство (10) обработки для определения передвижения субъекта по п. 1.
14. Способ (20) определения передвижения субъекта, включающий:
получение акселерометрических данных, указывающих на движение туловища субъекта (S21);
выполнение (S22A) фильтрации верхних частот на акселерометрических данных для получения отфильтрованных по верхним частотам акселерометрических данных;
выделение (S22B) по меньшей мере одной из ортогональных составляющих движения из отфильтрованных по верхним частотам данных акселерометра с использованием метода разделения источников;
выполнение фильтрации нижних частот на акселерометрических данных для получения отфильтрованных по нижним частотам акселерометрических данных;
определение гравитационной составляющей из отфильтрованных по нижним частотам акселерометрических данных (S23B);
сравнение направления по меньшей мере одной из указанных ортогональных составляющих движения с направлением гравитационной составляющей (S24) и
классифицирование движения субъекта как передвижение, если составляющая движения ортогональна или параллельна гравитационной составляющей (S25).
15. Машиночитаемый носитель, содержащий компьютерную программу со средствами программного кода, сконфигурированный для выполнения компьютером этапов способа по п. 14 при выполнении указанной компьютерной программы на компьютере.
| US 8036850 B2, 11.10.2011 | |||
| Станок для гибки уголковых рам | 1980 |
|
SU927369A1 |
| US 2010324384 A1, 23.12.2010 | |||
| US 8831705 B2, 09.09.2014 | |||
| US 2013298636 A1, 14.11.2013. | |||

