ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к обработке информации датчика с целью расширения возможностей его использования.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Мобильные устройства, переносимые пользователем, могут получать преимущества, если присутствует достоверная информация о контексте их применения. Например, если мобильное устройство с возможностями беспроводной связи перемещается с большой скоростью, оно может быть сконфигурировано для адаптации своего блока оценки канала с целью оптимизации рабочих характеристик приемопередатчика радиосигнала или параметров хэндовера в сотовой сети, таких как время запуска и гистерезис.
[0003] В целом, устройство может адаптировать свое функционирование к специфическим обстоятельствам, в которых оно находится, например, в условиях, когда желательно повысить уровень звука вне помещения по сравнению с уровнем, используемым внутри помещения, и при определенных условиях устройство может активизировать профиль, предусматривающий отсутствие звука, чтобы не вызывать помех.
[0004] Переносные приспособления, мобильные телефоны, смартфоны, планшетные компьютеры и другие устройства могут применяться пользователем в самых различных ситуациях, и адаптация к конфетным ситуациям может обеспечить преимущества с точки зрения удобства эксплуатации, в зависимости от фактического способа применения устройства и конкретной ситуации. Смартфон, например, может использоваться различными способами, например как телефон, игровое устройство, картографическое устройство, редактор текстов, будильник и электронная книга.
[0005] Устройства могут содержать датчики, такие, например, как датчик ускорения и/или приемники спутникового сигнала позиционирования, для сбора информации датчиков. К примерам приемников спутникового сигнала позиционирования можно отнести приемники системы глобального позиционирования (GPS, Global Positioning System), Galileo и ГЛОНАСС. Некоторые приемники могут принимать сигналы от группы систем спутникового позиционирования. Если устройство используется, например, для измерения расстояния, которое прошел или пробежал пользователь, то при таком применении может достигаться преимущество от наличия информации о том, находится ли устройство на запястье пользователя или в его кармане.
[0006] Если датчики входят в состав устройства, то они могут быть откалиброваны для получения более полезных данных. Например, передвижение устройства по траектории, напоминающей цифру 8, может быть удобно для калибровки компаса, содержащегося в устройстве.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] В соответствии с первым аспектом настоящего изобретения предлагается устройство, содержащее по меньшей мере одно ядро обработки и по меньшей мере одну память, в которой записан компьютерный программный код, при этом по меньшей мере одна память и компьютерной программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство выполняло по меньшей мере определение своего расположения по отношению к пользователю, определение уровня достоверности определения расположения и выбор либо классификатора, зависящего от расположения, либо общего классификатора на основе, по меньшей мере частично, расположения и уровня достоверности.
[0008] Различные варианты осуществления настоящего изобретения в соответствии с первым аспектом могут включать по меньшей мере один признак из приведенного ниже маркированного списка:
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство выполняло по меньшей мере выбор классификатора, зависящего от расположения, в том случае, если уровень достоверности превышает пороговое значение;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство выполняло по меньшей мере выбор общего классификатора в том случае, если уровень достоверности не превышает пороговое значение;
- под расположением понимается нахождение в одной из следующих позиций: запястье, карман, рюкзак или рука;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло расположение на основе выходных данных датчика;
- к датчикам относятся датчики из приведенного ниже списка: акселерометр, датчик спутникового позиционирования и радиоприемник;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло уровень достоверности на основе, по меньшей мере частично, набора опорных данных путем сравнения информации датчика с набором опорных данных;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло свое состояние на основе, по меньшей мере частично, классификатора, зависящего от расположения;
- устройство может находиться в одном из следующих состояний: стационарное, покой, ходьба, бег, езда на велосипеде, нахождение в автомобиле и неизвестное;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло состояние на основе, по меньшей мере частично, набора опорных данных путем сравнения информации датчика с набором опорных данных.
[0009] В соответствии со вторым аспектом настоящего изобретения предлагается устройство, содержащее по меньшей мере одно ядро обработки и по меньшей мере одну память, в которой хранится компьютерный программный код, при этом по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство по меньшей мере накапливало информацию датчика, определяло модель калибровки и инициировало передачу в сеть по меньшей мере одного из следующих компонентов: информация датчика, калиброванная информация датчика и модель калибровки.
[0010] Различные варианты осуществления настоящего изобретения в соответствии со вторым аспектом могут включать по меньшей мере один признак из приведенного ниже маркированного списка:
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство принимало из сети по меньшей мере один классификатор;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство заменяло ранее сохраненный классификатор на принятый классификатор;
- принятый классификатор позволяет определять состояние устройства;
- устройство может находиться в одном из следующих состояний: стационарное, покой, ходьба, бег, езда на велосипеде, нахождение в автомобиле и неизвестное;
- процедура определения модели калибровки включает определение выходных данных датчика в нейтральном состоянии;
- к датчику относится датчик ускорения, а нейтральное состояние представляет собой состояние покоя;
- устройство сконфигурировано для накопления информации датчика в ответ на обнаружение состояния покоя устройства;
- по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство передавало информацию датчика, по меньшей мере частично, перед инициированием передачи модели калибровки.
[0011] В соответствии с третьим аспектом настоящего изобретения предлагается способ, включающий определение расположения устройства по отношению к пользователю, определение уровня достоверности определения расположения и выбор либо классификатора, зависящего от расположения, либо общего классификатора на основе, по меньшей мере частично, расположения и уровня достоверности.
[0012] Различные варианты осуществления настоящего изобретения в соответствии с третьим аспектом могут включать по меньшей мере один признак из представленного выше маркированного списка, относящегося к первому аспекту.
[0013] В соответствии с четвертым аспектом настоящего изобретения предлагается способ, включающий накопление информации датчика, определение модели калибровки и инициирование передачи в сеть по меньшей мере одного из следующих компонентов: информация датчика, калиброванная информация датчика и модель калибровки.
[0014] Различные варианты осуществления настоящего изобретения в соответствии с четвертым аспектом могут включать по меньшей мере один признак из представленного выше маркированного списка, относящегося ко второму аспекту.
[0015] В соответствии с пятым аспектом настоящего изобретения предлагается устройство, содержащее средства для определения расположения устройства по отношению к пользователю, средства для определения уровня достоверности определения расположения и средства для выбора либо классификатора, зависящего от расположения, либо общего классификатора на основе, по меньшей мере частично, расположения и уровня достоверности.
[0016] В соответствии с шестым аспектом настоящего изобретения предлагается устройство, содержащее средства для накопления информации датчика, средства для определения модели калибровки и средства для инициирования передачи в сеть по меньшей мере одного из следующих компонентов: информация датчика, калиброванная информация датчика и модель калибровки.
[0017] В соответствии с седьмым аспектом настоящего изобретения предлагается машиночитаемый носитель информации, на котором хранится набор машиночитаемых инструкций, при выполнении которых по меньшей мере одним процессором устройство по меньшей мере определяет свое расположение по отношению к пользователю, определяет уровень достоверности определения расположения и выбирает либо классификатор, зависящий от расположения, либо общий классификатор на основе, по меньшей мере частично, расположения и уровня достоверности.
[0018] В соответствии с восьмым аспектом настоящего изобретения предлагается машиночитаемый носитель информации, на котором хранится набор машиночитаемых инструкций, при выполнении которых по меньшей мере одним процессором устройство по меньшей мере накапливает информацию датчика, определяет модель калибровки и инициирует передачу в сеть по меньшей мере одного из следующих компонентов: информация датчика, калиброванная информация датчика и модель калибровки.
[0019] В соответствии с девятым аспектом настоящего изобретения предлагается машиночитаемый носитель информации, на котором хранится набор машиночитаемых инструкций, при выполнении которых по меньшей мере одним процессором устройство по меньшей мере принимает некалиброванную информацию датчика от другого устройства, инициирует сохранение некалиброванной информации датчика в функциональном блоке памяти, принимает информацию о модели калибровки от упомянутого другого устройства и инициирует, по меньшей мере частично, калибровку сохраненной некалиброванной информации датчика для выработки калиброванной информации датчика.
Промышленная применимость
[0020] По меньшей мере некоторые варианты осуществления настоящего изобретения находят промышленное применение в обеспечении более точной адаптации устройств к условиям работы и/или более надежной идентификации окружающей их среды.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] На фиг. 1 показан пример системы, способной поддерживать по меньшей мере некоторые варианты осуществления настоящего изобретения.
[0022] На фиг. 2 показан пример применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления.
[0023] На фиг. 3 показан пример устройства, способного поддерживать по меньшей мере некоторые варианты осуществления настоящего изобретения.
[0024] На фиг. 4 показан алгоритм применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления.
[0025] На фиг. 5 показан алгоритм применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления.
[0026] На фиг. 6 показан алгоритм применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления.
[0027] На фиг. 7 показаны углы, относящиеся к акселерометру.
[0028] На фиг. 8 показан процесс самокалибровки акселерометра.
[0029] На фиг. 9 показан алгоритм обнаружения ускорения в состоянии покоя.
[0030] На фиг. 10 показан алгоритм выполнения первого способа в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения.
[0031] На фиг. 11 показан алгоритм выполнения второго способа в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0032] На фиг. 1 показан пример системы, способной поддерживать по меньшей мере некоторые варианты осуществления настоящего изобретения. На фиг. 1 показано устройство 110, которое может представлять собой, например, мобильный телефон, смартфон, планшетный компьютер, ноутбук или другое устройство с возможностью проводного или беспроводного соединения. Показанное устройство 110 соединяется с базовой станцией 130 по беспроводной линии 113 связи. Хотя на чертеже показана беспроводная линия связи, в некоторых вариантах осуществления настоящего изобретения линия 113 связи является проводной линией, такой, например, как универсальная последовательная шина (USB, universal serial bus) или Ethernet-канал. Беспроводная линия связи может соответствовать подходящей сотовой или отличной от сотовой технологии беспроводной связи. К примерам технологий сотовой беспроводной связи относятся технология долгосрочного развития (LTE, long term evolution) и технология широкополосного множественного доступа с кодовым разделением (WCDMA, wideband code division multiple access). К примерам технологий беспроводной связи, отличным от сотовых, относятся беспроводная локальная сеть (WLAN, wireless local area network), также называемая Wi-Fi, и технология глобального взаимодействия для микроволнового доступа (WiMAX, worldwide interoperability for microwave access).
[0033] Устройство 120 может представлять собой другое устройство с возможностью проводного или беспроводного соединения. Тип его может совпадать с типом устройства 110 или отличаться от него. Также как и устройство 110, устройство 120, показанное на чертеже, поддерживает беспроводное соединение с базовой станцией 130 по линии 123 связи. Подобно линии 113 связи, линия 123 связи может быть беспроводной или проводной. Хотя на фиг. 1 устройства 110 и 120 показаны в виде мобильных телефонов, объем настоящего изобретения не ограничен устройствами такого типа, и чертеж приводится лишь для примера.
[0034] Базовая станция 130 может содержать базовый блок, сконфигурированный для поддержки протокола связи, используемого устройством 110 и/или устройством 120. Например, если линия 113 связи соответствует технологии WLAN, базовая станция 130 может быть сконфигурирована для работы в качестве концентратора WLAN или точки доступа и может участвовать в реализации линии связи. Таким же образом, если линия 123 связи представляет собой Ethernet-соединение, базовая станция 130 может содержать концентратор Ethernet. Базовая станция, реализованная по технологии WLAN или LTE, может быть подключена к линиям связи, отвечающим таким стандартам. В некоторых вариантах осуществления настоящего изобретения устройство 120 по линии 123 связи соединяется с другой базовой станцией, отличной от базовой станции 130. Например, устройство 110 может по линии 113 связи подключаться к домашнему концентратору WLAN, а устройство 120 по линии 123 связи может подключаться к сотовой базовой станции.
[0035] Базовая станция 130 с использованием соединения 134 может подключаться к сетевому узлу 140. Например, если базовая станция 130 представляет собой сотовую базовую станцию, сетевой узел 140 может являться узлом базовой сети сотовой связи, таким, например, как коммутатор объекта управления мобильностью. Сетевой узел 140 с помощью соединения 145 может подключаться к шлюзу 150. Шлюз 150 может обеспечивать связь с другими сетями с использованием соединения 152. В некоторых вариантах осуществления настоящего изобретения сетевой узел 140 может отсутствовать, и базовая станция 130 может непосредственно подключаться к шлюзу 150.
[0036] Устройство 110 может быть сконфигурировано для выполнения попытки определения условий своего использования. С этой целью в устройство 110 может встраиваться датчик, такой, например, как акселерометр или гироскоп, или магнитометр, или барометр, или приемник спутникового сигнала позиционирования. К акселерометрам могут относиться, например, 3-осевая микроэлектромеханическая система (MEMS, microelectromechanical system), акселерометр, позволяющий одновременно измерять ускорение по трем независимым осям. К приемникам спутникового сигнала позиционирования могут относиться приемные модули GPS, Galileo и/или ГЛОНАСС.
[0037] Для определения условий своего использования устройство 110 может опираться на по меньшей мере один классификатор. Например, в устройство 110 может быть снабжено классификатором, позволяющим этому устройству выполнять попытку определения, находится ли пользователь в состоянии ходьбы, за рулем автомобиля или в неподвижном состоянии. Такой классификатор может содержать опорный набор данных, с которым могут сравниваться данные, поступающие от датчика, содержащегося в устройстве 110, для определения наилучшего соответствия информации об активности, которую устройство 110 затем воспринимает как информацию об активности пользователя. Например, если информация, поступающая от акселерометра, наилучшим образом соответствует опорным данным, связанным с бегом, устройство 110 может определить, что оно находится у пользователя, который выполняет пробежку. Таким образом, классификатор может содержать набор опорных данных, с которым может сравниваться фактическая информация датчика. Дополнительно или альтернативно классификатор может содержать набор правил классификации, например, правил классификации, которые позволяют предсказывать активность на основе данных датчика, причем эти правила выводятся на основе опорных данных в процессе обучения классификатора.
[0038] Вместо использования одного классификатора устройство 110 может быть сконфигурировано для работы с множеством классификаторов. Например, устройство 110 может быть сконфигурировано для определения в первую очередь расположения по отношению к пользователю. Другими словами, устройство 110 может определять, каким образом оно прикреплено к пользователю. Например, пользователь может прикрепить его к запястью, держать в кармане, в руке или в рюкзаке.
[0039] Устройство 110 может затем выбрать классификатор, зависящий от расположения, на основе, по меньшей мере частично, определенного расположения. Например, если датчик представляет собой акселерометр, информация, поступающая от датчика, будет различаться, например, для пользователя, выполняющего пробежку, в зависимости от того, на каком участке тела пользователя закреплено устройство 110. Таким образом, путем первоначального определения расположения и последующего определения с помощью классификатора, зависящего от расположения, активных действий, которыми занят пользователь, можно повысить уровень надежности определенной информации об активности. В целом, информацию датчика можно рассматривать как выходные данные датчика. Таким образом, устройство 110 может содержать специфичный для расположения на запястье классификатор, позволяющий определить активность пользователя, закрепившего устройство на запястье, специфичный для расположения в кармане классификатор, позволяющий определить активность пользователя, положившего устройство в карман, и т.д.
[0040] Расположение может определяться, например, с использованием классификатора расположения. Например, расположение может определяться путем сравнения амплитуды и частоты сигнала, выведенного датчиком, с опорными данными. Дополнительно или в альтернативном варианте выходной сигнал датчика может преобразовываться в набор признаков и сравниваться с опорными значениями. Что касается определения расположения, устройство 110 может определять уровень достоверности определения расположения. Уровень достоверности может определяться на основе, например, того, насколько информация датчика совпадает с наилучшим по соответствию набором опорных данных в классификаторе расположения. При обнаружении уровня достоверности, превышающего пороговый уровень, устройство 110 может использовать зависящий от расположения классификатор, соответствующий определенному расположению. При обнаружении уровня достоверности, меньшего порогового уровня, устройство 110 может использовать общий классификатор, не соответствующий какому-либо конкретному расположению.
[0041] Устройства 110 или 120 могут принимать данные обновления классификаторов, соответственно, по линиям 113 или 123 связи. Таким образом, если, например, в моду входит новая модель обуви, походка пользователя может измениться, и классификаторы могут быть обновлены, для того чтобы позволить устройству определять, что пользователь передвигается в подобной новой обуви, хотя такая информация первоначально, при изготовлении устройства, не предоставлялась.
[0042] Характеристики, касающиеся манеры ходьбы пользователя, могут использоваться для его идентификации, причем такие характеристики могут различаться в зависимости от того, каким образом он переносит устройство - например, на запястье, в кармане или в рюкзаке.
[0043] На фиг. 2 показан пример применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления. Совпадающие на фиг. 2 и фиг. 1 цифровые ссылки обозначают одинаковые структуры. Помимо структур, представленных на фиг.1, на фиг. 2 показана сеть 260 и служба 270. Служба 270 связана для обмена данных со шлюзом 150 через сеть 260. В некоторых вариантах осуществления настоящего изобретения служба 270 расположена в сети 260. Устройство 110 может осуществлять связь со службой 270 с использованием линии 113 связи, базовой станции 130, соединения 134, сетевого узла 140, линии 145 связи, шлюза 150, соединения 152 и сети 260. Сеть 260 может, например, представлять собой Интернет.
[0044] Устройство 110 может получать от датчика, содержащегося в устройстве 110, калиброванную и некалиброванную информацию. Устройство 110 может предоставлять калиброванную информацию датчика службе 270, что позволяет службе 270 использовать калиброванную информацию датчика в процессе подготовки новых классификаторов или изменения существующих классификаторов. Такие новые или измененные классификаторы могут впоследствии предоставляться устройству 110 и/или подобным устройствам для повышения уровня надежности их функционирования. Калиброванная информация датчика, предоставляемая устройством 110 службе 270, может включать индикатор, указывающий на то, что информация датчика откалибрована.
[0045] В альтернативном варианте для получения калиброванной информации датчика устройство 110 может предоставлять службе 270 некалиброванную информацию датчика. Некалиброванная информация датчика, предоставляемая устройством 110 службе 270, может включать индикатор, указывающий на то, что информация датчика не подвергалась калибровке. Служба 270 может сохранять некалиброванную информацию датчика. При калибровке своего датчика устройство 110 определяет модель калибровки. Модель калибровки описывает смещения датчика, позволяющие получить откалиброванную информацию датчика. Например, в случае датчика, содержащего 3-осевой акселерометр, в модели калибровки для каждой из осей может использоваться значение сдвига, которое выводится акселерометром в качестве измеренного значения по направлению данной оси в том случае, если в действительности ускорение не обнаружено. Таким образом, путем вычитания значения модели калибровки из значения, соответствующего некалиброванной информации датчика, некалиброванная информация датчика преобразуется в калиброванную информацию датчика.
[0046] Устройство 110 может быть сконфигурировано для предоставления модели калибровки службе 270. В процессе приема модели калибровки служба 270 может преобразовать ранее принятую некалиброванную информацию датчика устройства 110 в калиброванную информацию датчика устройства 110. Эта калиброванная информация датчика затем может использоваться таким же образом, как информация датчика, принятая от устройства 110 уже в формате калиброванных данных.
[0047] На фиг. 3 показан пример устройства, способного поддерживать по меньшей мере некоторые варианты осуществления настоящего изобретения. На чертеже показано устройство 300, которое, например, может представлять собой устройство 110, показанное на фиг. 1 или на фиг. 2. В состав устройства 300 входит процессор 310, который, например, может представлять собой одноядерный или многоядерный процессор, при этом одноядерный процессор содержит одно ядро обработки, а многоядерный процессор - несколько ядер обработки. Например, процессор 310 может представлять собой процессор Qualcomm Snapdragon 800. Процессор 310 может включать несколько процессоров. Ядро обработки может содержать, например, ядро обработки Cortex-A8, изготовленное компанией Intel Corporation, или ядро обработки Brisbane, изготовленное компанией Advanced Micro Devices Corporation. В состав процессора 310 может входить по меньшей мере одна специализированная интегральная схема (ASIC, application-specific integrated circuit). Процессор 310 может содержать по меньшей мере одну программируемую пользователем вентильную матрицу (FPGA, field-programmable gate array). С помощью процессора 310 в устройстве 300 могут выполняться операции соответствующего способа. Процессор 310 для выполнения требуемых действий может быть сконфигурирован, по меньшей мере частично, с помощью компьютерных инструкций. Процессор 310 может представлять собой цифровой сигнальный процессор (DSP, digital signal processor) или блок микроконтроллера MCU (microcontroller unit) или компонент, настроенный для маломощной обработки данных датчика, например, Qualcomm Sensor Core.
[0048] Устройство 300 может содержать память 320. Память 320 может представлять собой оперативную и/или энергонезависимую память. Память 320 может содержать по меньшей мере одну микросхему RAM. Память 320 может представлять собой, например, магнитную, оптическую и/или голографическую память. Память 320, по меньшей мере частично, может быть доступна для процессора 310. Память 320 может использоваться в качестве средства хранения информации. В памяти 320 могут храниться компьютерные инструкции, для исполнения которых сконфигурирован процессор 310. Если компьютерные инструкции, сконфигурированные для инициирования выполнения процессором 310 определенных действий, хранятся в памяти 320, и устройство 300 в целом сконфигурировано для работы под управлением процессора 310 с использованием компьютерных инструкций, хранящихся в памяти 320, то процессор 310 и/или по меньшей мере одно ядро обработки могут рассматриваться как компоненты, сконфигурированные для выполнения конкретных указанных действий.
[0049] Устройство 300 может содержать передатчик 330. Устройство 300 может содержать приемник 340. Передатчик 330 и приемник 340 могут быть сконфигурированы, соответственно, для передачи и приема информации, соответствующей по меньшей мере одному стандарту сотовой или отличной от сотовой связи. Передатчик 330 может состоять из нескольких передатчиков. Приемник 340 может включать несколько приемников. Передатчик 330 и/или приемник 340 могут быть сконфигурированы для работы в соответствии, например, со стандартами глобальной системы мобильной связи (GSM), широкополосного множественного доступа с кодовым разделением (WCDMA), технологии долгосрочного развития (LTE), IS-95, беспроводной локальной сети (WLAN), Ethernet и/или глобального взаимодействия для микроволнового доступа (WiMAX).
[0050] Устройство 300 может содержать приемопередатчик 350 ближней связи (NFC, near-field communication). Приемопередатчик 350 для NFC может поддерживать по меньшей мере одну из технологий NFC, такую как NFC, Bluetooth, Wibree или подобные им технологии.
[0051] В состав устройства 300 может входить пользовательский интерфейс 360 (UI, user interface). UI 360 может содержать по меньшей мере один из следующих компонентов: дисплей, клавиатуру, сенсорный экран, вибратор, предназначенный для передачи сообщения пользователю путем инициирования вибрации устройства 300, динамик и микрофон. Пользователю с помощью передатчика 330 и приемника 340 или приемопередатчика 350 NFC предоставляется возможность работать с устройством 300 с помощью UI 360, например, для приема входящих телефонных вызовов, посылки телефонных вызовов или видеовызовов, просмотра информации в Интернете, управления цифровыми файлами, хранимыми в памяти 320 или в облачной инфраструктуре, и/или для использования игровых программ.
[0052] Устройство 300 может содержать модуль 370 идентификации пользователя или допускать его применение. Модуль 370 идентификации пользователя может представлять собой, например, модуль идентификации абонента (SIM, subscriber identity module), то есть карту, устанавливаемую в устройство 300. В модуле 370 идентификации пользователя могут храниться сведения о подписке на услуги связи пользователя устройства 300. В модуле 370 идентификации пользователя может содержаться зашифрованная информация, применяемая для опознавания пользователя устройства 300 и/или для упрощения шифрования обмениваемой или биллинговой информации пользователя устройства 300 для связи, осуществляемой посредством этого устройства.
[0053] Процессор 310 может быть оборудован передатчиком, настроенным для вывода информации из процессора 310 через электрические проводники, внутренние по отношению к устройству 300, в другие устройства, входящие в состав устройства 300. Такой передатчик может представлять собой передатчик последовательной шины, настроенный, например, для вывода информации, по меньшей мере через один электрический проводник, в память 320, в которой эта информация должна сохраняться. Вместо последовательной шины передатчик может содержать параллельную шину. Таким же образом, процессор 310 может быть оборудован приемником, настроенным для приема информации в процессоре 310 через электрические проводники, внутренние по отношению к устройству 300, из других устройств, входящих в состав устройства 300. Такой приемник может представлять собой приемник последовательной шины, настроенный, например, для приема информации по меньшей мере через один электрический проводник из приемника 340 для обработки в процессоре 310. Вместо последовательной шины приемник может содержать параллельную шину.
[0054] Устройство 300 может содержать дополнительные компоненты, не показанные на фиг. 3. Например, если устройство 300 представляет собой смартфон, то оно может быть оборудовано по меньшей мере одной цифровой камерой. Некоторые устройства 300 могут быть оснащены камерой на передней и задней панелях, при этом камера на задней панели может предназначаться для цифровой фотосъемки, а камера на передней панели - для видеотелефонии. Устройство 300 может содержать датчик отпечатков пальцев, настроенный для аутентификации, по меньшей мере частично, пользователя устройства 300. В некоторых вариантах осуществления настоящего изобретения устройство 300 не содержит по меньшей мере одно из описанных выше устройств. Например, некоторые устройства 300 могут быть не оборудованы передатчиком 350 NFC и/или модулем 370 идентификации пользователя. Устройство 300 может содержать датчик, такой, например, как акселерометр или приемник спутникового сигнала позиционирования.
[0055] Процессор 310, память 320, передатчик 330, приемник 340, приемопередатчик 350 NFC, UI 360 и/или модуль 370 идентификации пользователя могут различным образом взаимно соединяться с помощью электрических проводников, внутренних по отношению к устройству 300. Например, для предоставления устройству возможности обмена информацией каждое из вышеупомянутых устройств по отдельности может подключаться к главной шине, внутренней по отношению к устройству 300. Однако, как понятно специалисту в этой области техники, это только один пример, и в зависимости от различных реализаций может выбираться другой способ взаимного соединения по меньшей мере двух вышеупомянутых устройств без выхода за рамки настоящего изобретения.
[0056] На фиг. 4 показан алгоритм применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления. Фазы показанного способа выполняются, например, в устройстве 110 или в устройстве управления, сконфигурированном для управления функционированием устройства 110. На фазе 410 принимается некалиброванная информация датчика, и на фазе 410 определяется, откалиброван ли датчик. В том случае, если датчик откалиброван, осуществляется переход к фазе 420, на которой используется модель калибровки для преобразования некалиброванной информации датчика в калиброванную. Далее на фазе 430 калиброванная информация датчика передается в облачную инфраструктуру или, в общем случае, в сетевой узел. Сигналы датчика, по меньшей мере частично, могут передаваться в сжатой форме. На фазе 440 выполняется процесс классификации активности на основе, по меньшей мере частично, калиброванной информации датчика и по меньшей мере одного классификатора.
[0057] Если, с другой стороны, на фазе 410 определяется, что датчик не откалиброван, то есть модель калибровки для датчика отсутствует, то на фазе 450 в облачную инфраструктуру или, в общем случае, в сетевой узел передается некалиброванная информация датчика. Далее, на фазе 460, может выполняться процесс классификации активности на основе некалиброванной информации датчика.
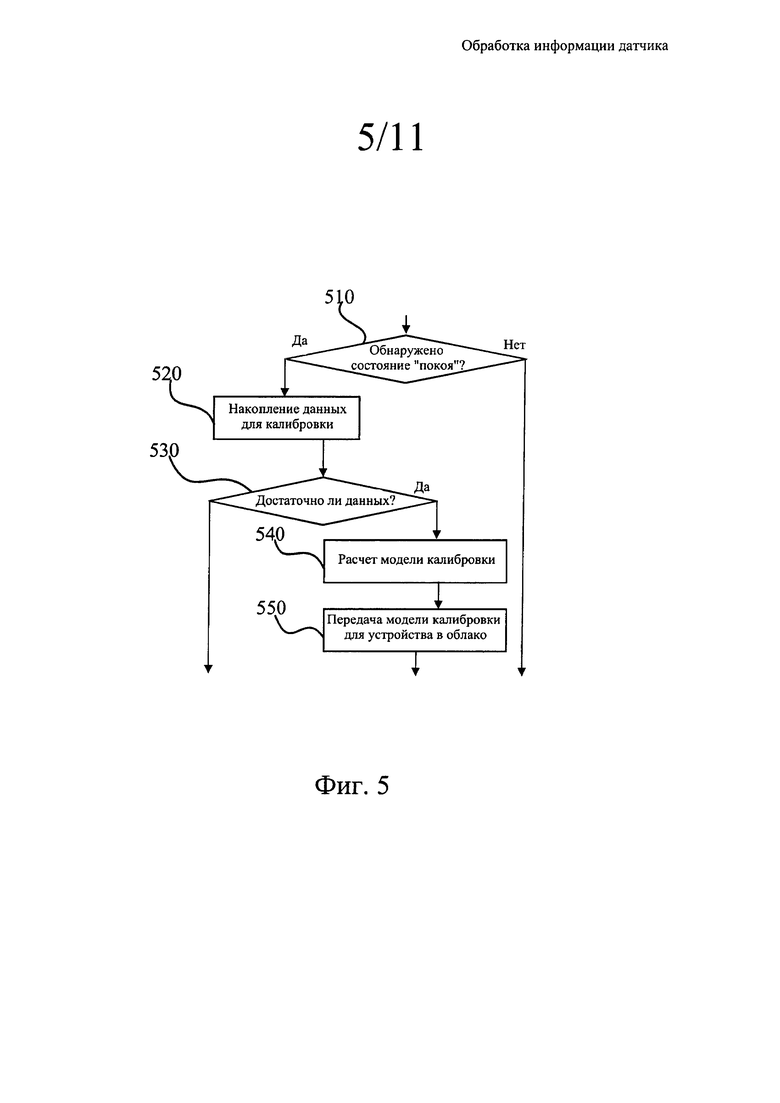
[0058] На фиг. 5 показан алгоритм применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления. Процесс обработки начинается на фазе 510, которая может выполняться после фазы 460, показанной на фиг. 4, например, если на фазе 460 определяется, что устройство, такое как устройство 110, находится в состоянии покоя. В этом случае осуществляется переход к следующей фазе 520, на которой данные накапливаются с целью калибровки. Например, может накапливаться информация датчика, представляющая 5 или 10 секунд показаний в состоянии неподвижности, поступающих от акселерометра. По мере накопления информации выполняется фаза 530, на которой определяется, накоплен ли достаточный объем данных. Если достаточный объем данных еще не накоплен, на фазе 530 некалиброванные данные могут дополнительно передаваться в облачную инфраструктуру или, в общем случае, в сетевой узел. Однако в том случае, если на фазе 530 определяется, что накоплен достаточный объем данных от датчика, на фазе 540 выводится модель калибровки на основе накопленной информации датчика. Далее на фазе 550 модель калибровки может предоставляться облачной инфраструктуре или, в более общем случае, сетевому узлу.
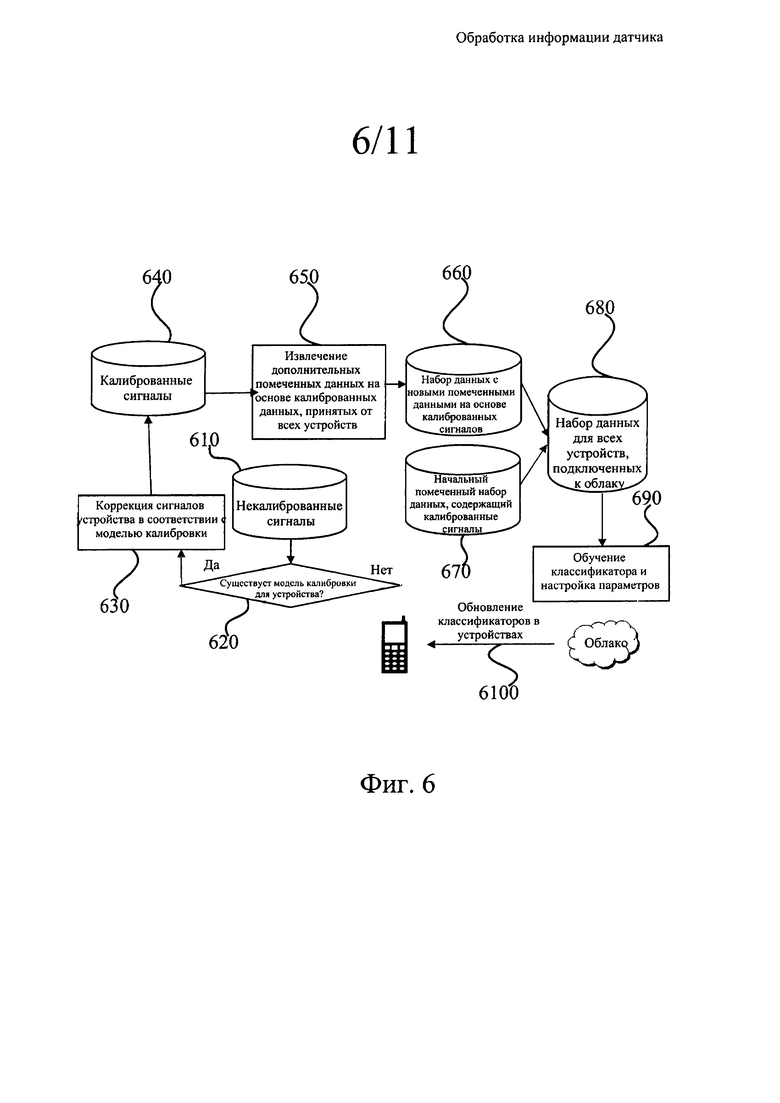
[0059] На фиг. 6 показан алгоритм применения настоящего изобретения в соответствии по меньшей мере с некоторыми вариантами осуществления. На фиг. 6 показаны операции, выполняемые в обслуживающем устройстве 270, которое соответствует облачной инфраструктуре или, в общем случае, сетевому узлу, упоминавшимся в алгоритмах, показанных на фиг. 4 и фиг. 5.
[0060] В запоминающем устройстве 610 сохраняются некалиброванные сигналы, содержащие некалиброванную информацию датчика, принятую от устройства, такого, например, как устройство 110, показанное на фиг. 1. На фазе 620 проверяется, известна ли модель калибровки для этого конкретного устройства. Если модель неизвестна, процесс ожидает модель калибровки. В период ожидания может приниматься и сохраняться дополнительная некалиброванная информация датчика.
[0061] Если, с другой стороны, модель калибровки для этого конкретного устройства известна, осуществляется переход к фазе 630, на которой некалиброванная информация датчика корректируется с использованием модели калибровки для получения калиброванной информации датчика, которая сохраняется в запоминающем устройстве 640.
[0062] На фазе 650 используется калиброванная информация датчика, поступающая от нескольких устройств, для расширения существующего набора данных, хранимого в запоминающем устройстве 660, в котором содержится информация, требуемая для выполнения обучения ранее созданных классификаторов и/или регулировки их параметров на основе наблюдения за характеристиками калиброванной информации датчика, поступающей от нескольких устройств. Например, если калиброванная информация датчика указывает на новый вид периодичности, или статистические характеристики еще не зафиксированы в классификаторе, может определяться новый классификатор на основе этих статистических характеристик.
[0063] В запоминающем устройстве 680 сохраняется новый набор классификаторов, определенный, по меньшей мере частично, на основе ранее созданных классификаторов 670 и набора данных из запоминающего устройства 660. На фазе 690 набор классификаторов может настраиваться для повышения уровня функциональности.
[0064] На фазе 6100 инициируется передача обновленных классификаторов в устройства подходящего типа.
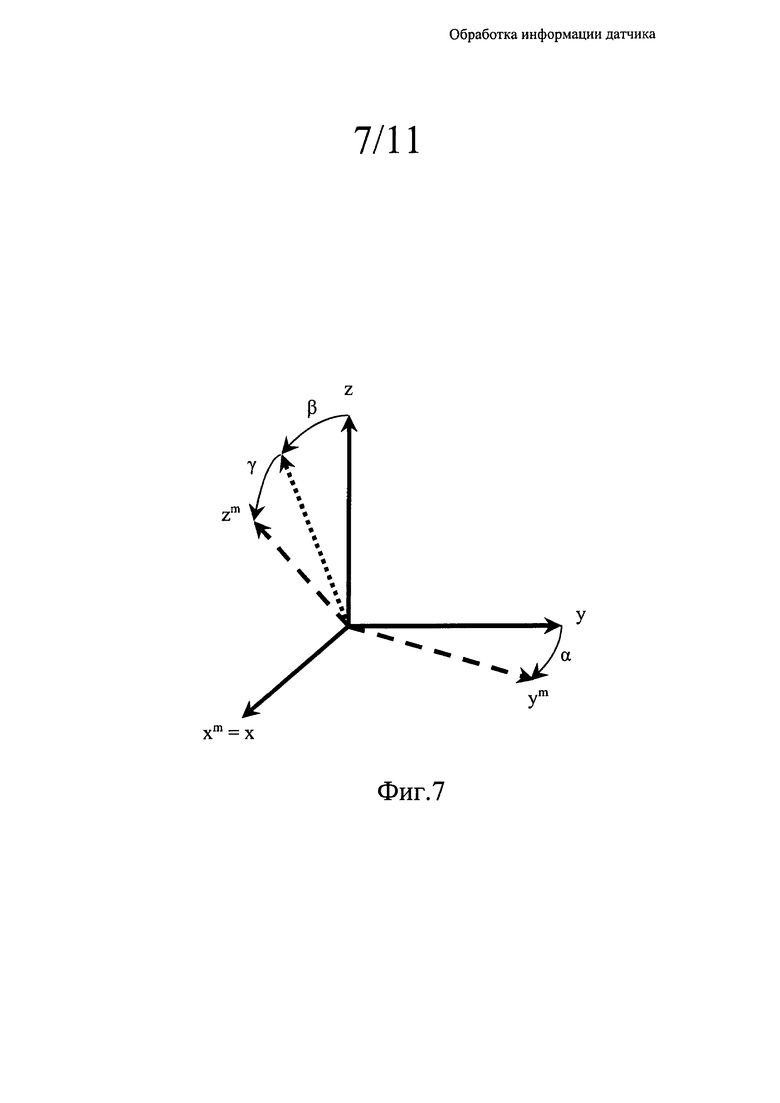
[0065] На фиг. 7 показаны углы, имеющие отношение к примеру акселерометра. Сигналы, поступающие от 3-осевого акселерометра, дискретизируются с частотой от 20 до 40 Гц. Для обнаружения состояния "покоя" выполняется программное обеспечение распознавания активности.
[0066] Если обнаружено состояние "покоя", устройство может выполнить самокалибровку и оценку уровней шумов (и дополнительно -спектральной плотности мощности) для всех каналов акселерометра. Значения на выходе акселерометра MEMS отличается от измеряемой величины ускорения из-за воздействия различных факторов, таких как условия окружающей среды (температура, влажность), погрешности при изготовлении, электрические помехи. Для количественного определения этих расхождений предложены различные модели измерения. В простейшей линейной модели, использующей два параметра, предполагается, что на трех осях акселерометра вырабатывается одинаковое напряжение для одинакового ускорения. То есть, выходное напряжение νi на каждой оси i задается путем умножения измеренного ускорения ai на коэффициент g и смещается на величину отклонения b:
[0067] νi=gai+b.
[0068] В данном случае для всех трех осей используется одинаковый коэффициент и отклонение. Более реалистичная модель позволяет задавать индивидуальные коэффициенты gi и значения отклонения bi для каждой из осей:
[0069] νi=giai+bi
[0070] Модель измерений с использованием таких шести параметров позволяет выполнить более точную калибровку акселерометра. Оси акселерометра MEMS не полностью ортогональны друг другу, и между отдельными каналами осей также существуют перекрестные помехи. Описанные выше модели с двумя и шестью параметрами не позволяют смоделировать такие эффекты, для этого в большей степени подходит описываемая ниже модель с девятью параметрами.
[0071] Рассматривается следующая модель измерений, которая относится к выходному сигналу ν трехосевого акселерометра для получения истинного ускорения а: для каждой оси определен мультипликативный коэффициент и аддитивное отклонение; кроме того, принимается во внимание смещение осей, вызванное неортогональностью, см. фиг. 7.
Рассмотрим два набора базисных векторов: x, y, z, соответствующий ортонормированной системе координат, и xm, ym, zm, соответствующий смещенной (не ортогональной) системе координат. Ортонормированные базисные векторы выбираются таким образом, чтобы выполнялось равенство xm=x. Смещенные базисные векторы ym получаются путем вращения вокруг оси z на угол α:

Рассогласованный базисный вектор zm получается путем (i) вращения вокруг оси y на угол β и (ii) вращения вокруг оси x на угол γ:
[0072]

[0073] Преобразование координат из ортогональной системы x, y, z в смещенную систему xm, ym, zm выполняется следующим образом:
[0074]

[0075]
[0076] где a - вектор ускорения в ортогональных координатах, am - вектор ускорения в смещенных координатах. Значение ν на выходе акселерометра рассчитывается следующим образом:

[0077] где G - матрица коэффициентов, b - смещение. Обратное преобразование результатов измерений ν в значение ускорения a выполняется следующим образом:

[0078]
[0079] На фиг. 8 показан процесс самокалибровки акселерометра. На фазе 820 выполняется обнаружение состояние "покоя" после приема на фазе 810 новых показаний акселерометра. Вектор среднего ускорения на фазе 830 добавляется к сохраненной матрице ускорения в состоянии покоя после обнаружения нового расположения устройства в состоянии покоя. Параметры калибровки вычисляются на фазе 840 и сохраняются на фазе 850.
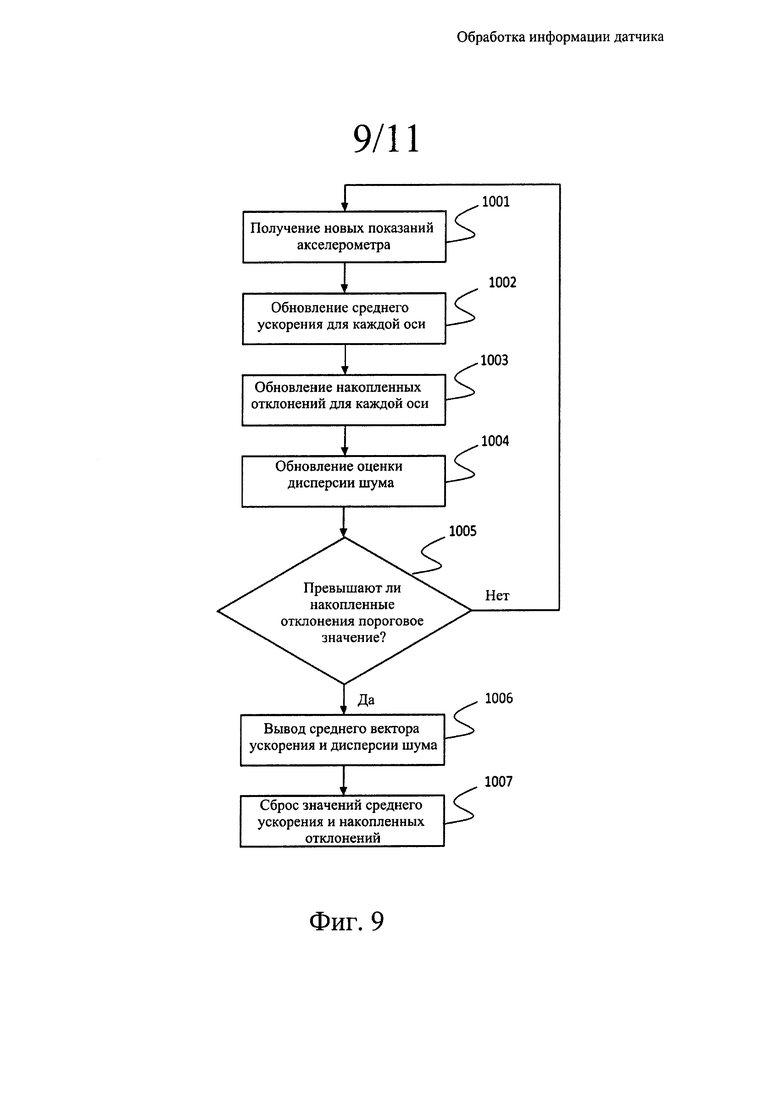
[0080] На фиг. 9 показан алгоритм обнаружения состояния покоя. Алгоритм обнаружения состояния покоя может выполняться непрерывно для получения необработанных результатов измерений и вывода среднего значения вектора ускорения после обнаружения новой позиции устройства в состоянии покоя. На фазе 1002 этого алгоритма экспоненциальное усредненное значение ускорения 
[0081] 
[0082] Верхнее (dU) и нижнее (dL) значения накопленного отклонения обновляются на фазе 1003 следующим образом:
[0083]


[0084] Новая ориентация устройства в состоянии покоя обнаруживается на фазе 1005, если какое-либо значение накопленного отклонения превышает пороговое значение.
[0085] Величина l=||a||2 вектора ускорения, заданная моделью измерения, вычисляется следующим образом:
[0086] Параметры К и b калибровки модели измерения могут вычисляться следующим образом:
[0095] Большинство подходов к калибровке акселерометра основаны на простом предположении, что идеальная величина выходного вектора акселерометра, находящегося в покое, должна составлять 1д (ускорение свободного падения). Типичный подход для реализации метода наименьших квадратов состоит в минимизации остатка (квадрат отклонения
[0087] 
[0088] 
[0089] 
[0090] 
[0091] 
[0092] 
[0093] 
[0094] 
от g величин измеренных векторов акселерометра) в виде функции от параметров калибровки. Качество калибровки значительно ухудшается при малом количестве измеренных векторов ускорения в состоянии покоя. Для устранения этого недостатка предлагается подход к выполнению калибровки на основе регуляризации Тихонова. Потери формируются из двух частей: (i) остаток согласно подходу для реализации метода наименьших квадратов, (ii) составляющая регуляризации, которая стабилизирует оценки параметров калибровки. То есть, алгоритм калибровки минимизирует следующую функцию потерь:
[0096] 
[0097] где λ - параметр регуляризации.
[0098] Обнаруженные векторы ускорения в состоянии покоя сохраняются в виде строк в матрице V ускорения в состоянии покоя. На первом шаге алгоритма расчета параметров калибровки (фиг.3) выполняется формирование ковариационной матрицы и на основе ν следующим образом:
[0099] 
[00100] Затем решение проблемы регуляризованных наименьших квадратов
[00101] 
[00102] осуществляется следующим образом:
[00103] с=(UTU+λI)-1U7
[00104] После этого параметры К и b калибровки рассчитываются на основе параметра с регрессии.
[00105] На фиг. 10 показан алгоритм выполнения первого способа в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения. Фазы показанного способа могут выполняться, например, в устройстве 110 или в устройстве управления, сконфигурированном для управления функционированием устройства 110 при вставке в него.
[00106] На фазе М110 определяется расположение устройства по отношению к пользователю. На фазе Μ120 определяется уровень достоверности определения расположения. Наконец, на фазе Μ130 выбирается либо классификатор, зависящий от расположения, либо общий классификатор на основе, по меньшей мере частично, расположения и уровня достоверности.
[00107] На фиг. 11 показан алгоритм выполнения второго способа в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения. Фазы показанного способа могут выполняться, например, в устройстве 110 или в устройстве управления (при его наличии), сконфигурированном для управления функционированием устройства 110.
[00108] На фазе М210 выполняется накопление информации датчика. На фазе М220 определяется модель калибровки. Наконец, на фазе М230 инициируется передача в сеть по меньшей мере одного из следующих компонентов: информация датчика, калиброванная информация датчика и модель калибровки.
[00109] Следует принимать во внимание, что варианты осуществления настоящего изобретения не ограничиваются конкретными структурами, шагами выполнения процесса или компонентами, раскрытыми в этом описании, но могут дополняться их эквивалентами, что должно быть очевидно специалистам в соответствующей области техники. Следует также понимать, что терминология, применяемая в этом описании, используется только с целью описания конкретных вариантов осуществления настоящего изобретения и не предназначена для ограничения объема изобретения.
[00110] В рамках этого описания такие термины, как "один из вариантов осуществления настоящего изобретения" или "вариант осуществления настоящего изобретения" означают, что определенные признаки, структуры или характеристики, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, появление фраз "в одном из вариантов осуществления настоящего изобретения" или "в варианте осуществления настоящего изобретения" в различных местах настоящего описания не обязательно в каждом случае указывает на одну и ту же реализацию.
[00111] В данном описании множество отдельных элементов, структурных элементов, составных элементов и/или материалов могут для удобства представляться в общем списке. Однако эти списки должны формироваться таким образом, чтобы каждый элемент такого списка идентифицировался как отдельный и уникальный элемент. Таким образом, ни один из отдельных элементов такого списка не должен фактически толковаться в качестве эквивалента любого другого элемента того же списка исключительно на основе представления этих элементов в общей группе, без указания на обратное. Кроме того, различные варианты и примеры осуществления настоящего изобретения в этом описании могут приводиться совместно с альтернативами для отдельных упомянутых компонентов. Следует принимать во внимание, что такие варианты осуществления, примеры и альтернативные варианты не следует фактически толковать как эквивалентные, но они должны рассматриваться в качестве отдельных и автономных представлений настоящего изобретения.
[00112] Кроме того, описанные признаки, структуры или характеристики могут комбинироваться любым подходящим образом в одном или более вариантах осуществления настоящего изобретения. В описании с целью разъяснения приводится ряд конкретных подробностей, таких как примеры длины, ширины, конфигурации, позволяющих глубоко разобраться в сущности вариантов осуществления настоящего изобретения. Однако специалист в этой области техники должен понимать, что настоящее изобретение может быть осуществлено без использования одного или более конфетных описанных элементов или с использованием других способов, компонентов, материалов и т.д. В других случаях общеизвестные структуры, материалы или операции не показаны или не описаны подробно, для того чтобы более ярко высветить аспекты настоящего изобретения.
[00113] В то время как приведенные примеры только иллюстрируют принципы одного или более конкретных применений, специалисту в этой области техники должно быть очевидно, что возможны изменения в форме, использовании и вариантах реализации без каких-либо изобретательских действий и без нарушения принципов и концепций настоящего изобретения. Соответственно, предполагается, что объем настоящего изобретения ограничен только формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И АППАРАТУРА ДЛЯ КЛАССИФИКАЦИИ МНОЖЕСТВА СОСТОЯНИЙ УСТРОЙСТВА | 2012 |
|
RU2597524C2 |
| УСТРОЙСТВО, СПОСОБ И КОМПЬЮТЕРНАЯ ПРОГРАММА ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ ПОЛЬЗОВАТЕЛЮ | 2014 |
|
RU2601152C2 |
| КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2390942C2 |
| СПОСОБЫ КАЛИБРОВКИ ДАННЫХ ОБ УРОЖАЙНОСТИ | 2016 |
|
RU2670905C9 |
| ОБНОВЛЕНИЕ МОДЕЛЕЙ КЛАССИФИКАТОРОВ ПОНИМАНИЯ ЯЗЫКА НА ОСНОВЕ КРАУДСОРСИНГА | 2016 |
|
RU2699587C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОЛЬЗОВАТЕЛЯ УСТРОЙСТВА ДЛЯ ЛИЧНОЙ ГИГИЕНЫ | 2018 |
|
RU2779067C2 |
| ИНФОРМАЦИЯ О ПОГОДНЫХ УСЛОВИЯХ НА ОСНОВЕ МАГНИТОМЕТРОВ | 2014 |
|
RU2582500C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫБОРА ПРИЕМНИКА | 2010 |
|
RU2540844C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УСТРОЙСТВА ДЛЯ ОЧИСТКИ ПОЛОСТИ РТА | 2017 |
|
RU2763901C2 |
| Способ и устройство для захвата изображений | 2016 |
|
RU2658116C2 |







Группа изобретений относится к средствам определения расположения устройства по отношению к пользователю. Технический результат – обеспечение точной адаптации устройств к условиям работы и более надежной идентификации окружающей их среды. Для этого предлагается устройство, содержащее по меньшей мере одно ядро обработки и по меньшей мере одну память, в которой записан компьютерный программный код, при этом по меньшей мере одна память и компьютерной программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство выполняло по меньшей мере определение своего расположения по отношению к пользователю на основе выходных данных датчика, определение уровня достоверности определения расположения и выбор либо классификатора, зависящего от расположения, в том случае, если уровень достоверности превышает пороговое значение, либо общего классификатора в том случае, если уровень достоверности не превышает пороговое значение, на основе, по меньшей мере частично, расположения и уровня достоверности, при этом классификатор содержит набор опорных данных, с которыми можно сравнить фактическую информацию датчика. 4 н. и 12 з.п. ф-лы, 11 ил.
1. Устройство для определения расположения устройства по отношению к пользователю, содержащее по меньшей мере одно ядро обработки и по меньшей мере одну память, в которой хранится компьютерный программный код, при этом по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство выполняло по меньшей мере следующие операции:
определение расположения устройства по отношению к пользователю на основе выходных данных датчика;
определение уровня достоверности определения расположения и
выбор либо классификатора, зависящего от расположения, в том случае, если уровень достоверности превышает пороговое значение, либо общего классификатора в том случае, если уровень достоверности не превышает пороговое значение, на основе, по меньшей мере частично, расположения и уровня достоверности, при этом классификатор содержит набор опорных данных, с которыми можно сравнить фактическую информацию датчика.
2. Устройство по п. 1, отличающееся тем, что расположение включает одно из следующего: запястье, карман, рюкзак или рука.
3. Устройство по п. 1, отличающееся тем, что упомянутый датчик включает датчик из следующего списка: акселерометр, датчик спутникового позиционирования, радиоприемник, гироскоп, магнитометр и барометр.
4. Устройство по п. 1 или 2, отличающееся тем, что по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло уровень достоверности на основе, по меньшей мере частично, набора опорных данных путем сравнения информации датчика с набором опорных данных.
5. Устройство по п. 1 или 2, отличающееся тем, что по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло свое состояние на основе, по меньшей мере частично, классификатора, зависящего от расположения.
6. Устройство по п. 5, отличающееся тем, что его состояние включает одно из следующих состояний: стационарное, покой, ходьба, бег, езда на велосипеде, нахождение в автомобиле и неизвестное.
7. Устройство по п. 5, отличающееся тем, что по меньшей мере одна память и компьютерный программный код сконфигурированы таким образом, чтобы при взаимодействии по меньшей мере с одним ядром обработки устройство определяло состояние, по меньшей мере частично, на основе набора опорных данных путем сравнения информации датчика с набором опорных данных.
8. Способ определения расположения устройства по отношению к пользователю, включающий:
определение расположения устройства по отношению к пользователю на основе выходных данных датчика;
определение уровня достоверности определения расположения и
выбор либо классификатора, зависящего от расположения, в том случае, если уровень достоверности превышает пороговое значение, либо общего классификатора в том случае, если уровень достоверности не превышает пороговое значение, на основе, по меньшей мере частично, расположения и уровня достоверности, при этом классификатор содержит набор опорных данных, с которыми можно сравнить фактическую информацию датчика.
9. Способ по п. 8, отличающийся тем, что расположение включает одно из следующего: запястье, карман, рюкзак или рука.
10. Способ по п. 8, отличающийся тем, что упомянутый датчик включает датчик из следующего списка: акселерометр, датчик спутникового позиционирования, радиоприемник, гироскоп, магнитометр и барометр.
11. Способ по п. 8 или 9, отличающийся тем, что уровень достоверности определяют на основе, по меньшей мере частично, набора опорных данных путем сравнения информации датчика с набором опорных данных.
12. Способ по п. 8 или 9, включающий также определение состояния устройства на основе, по меньшей мере частично, классификатора, зависящего от расположения.
13. Способ по п. 12, отличающийся тем, что состояние устройства включает одно из следующих состояний: стационарное, покой, ходьба, бег, езда на велосипеде, нахождение в автомобиле и неизвестное.
14. Способ по п. 12, отличающийся тем, что состояние определяют на основе, по меньшей мере частично, набора опорных данных и сравнения информации датчика с набором опорных данных.
15. Устройство для определения расположения устройства по отношению к пользователю, содержащее:
средства определения расположения устройства по отношению к пользователю на основе выходных данных датчика;
средства определения уровня достоверности определения расположения и
средства для выбора либо классификатора, зависящего от расположения, в том случае, если уровень достоверности превышает пороговое значение, либо общего классификатора в том случае, если уровень достоверности не превышает пороговое значение, на основе, по меньшей мере частично, расположения и уровня достоверности, при этом классификатор содержит набор опорных данных, с которыми можно сравнить фактическую информацию датчика.
16. Машиночитаемый носитель информации, содержащий набор машиночитаемых инструкций, при исполнении которых по меньшей мере одним процессором устройство выполняет по меньшей мере:
определение расположения устройства по отношению к пользователю на основе выходных данных датчика;
определение уровня достоверности определения расположения и
выбор либо классификатора, зависящего от расположения, в том случае, если уровень достоверности превышает пороговое значение, либо общего классификатора в том случае, если уровень достоверности не превышает пороговое значение, на основе, по меньшей мере частично, расположения и уровня достоверности, при этом классификатор содержит набор опорных данных, с которыми можно сравнить фактическую информацию датчика.
| СПОСОБ ДЕТЕКТИРОВАНИЯ И КОМПЕНСАЦИИ ДЛЯ КОНТРОЛЯ МЕСТА АКТИВНОСТИ НА ТЕЛЕ | 2006 |
|
RU2435521C2 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА АНАЛИЗА | 2006 |
|
RU2427872C2 |
| Способ получения корунда | 1950 |
|
SU93003A1 |
| EP 1254629 B1, 22.03.2006 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

