Область техники, к которой относится изобретение
[1] Данное раскрытие сущности относится к работе транспортного средства, включающей в себя составление маршрутов и навигацию.
Уровень техники
[2] Транспортное средство может включать в себя систему управления, которая формирует и поддерживает маршрут передвижения и может управлять транспортным средством таким образом, что оно проезжает по маршруту передвижения. Например, автономное транспортное средство может управляться автономно, без прямого вмешательства человека, таким образом, что оно проезжает по маршруту передвижения из места отправления в место назначения. Как для автономных транспортных средств, так и для неавтономных транспортных средств, желательно знать, где удаленные транспортные средства находятся вдоль этого маршрута.
Сущность изобретения
[3] В данном документе раскрыты аспекты, признаки, элементы, реализации и варианты осуществления формирования проецируемой информации касательно транспортного средства для использования при проезде по транспортной сети для транспортных средств, позволяющей рассматриваемому транспортному средству работать с использованием прогнозирований намерений удаленных транспортных средств.
[4] Аспект раскрытых вариантов осуществления представляет собой способ формирования проецируемой информации касательно транспортного средства для использования при проезде по транспортной сети для транспортных средств. Способ содержит прием, в рассматриваемом транспортном средстве, информации пространственного состояния удаленных транспортных средств для удаленного транспортного средства, идентификацию информации транспортной сети для транспортных средств, представляющей участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств, формирование посредством процессора в ответ на инструкции, сохраненные на некратковременном компьютерно-читаемом носителе, по меньшей мере, одного начального значения вероятности на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств в начальной временной точке, причем каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, в информации транспортной сети для транспортных средств, формирование для множества временных точек, включающих в себя начальную временную точку, отклонения удаленного транспортного средства между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств, обновление, для каждой одной полосы движения и для каждого отклонения, правдоподобия того, что удаленное транспортное средство придерживается одной полосы движения, с использованием нового значения вероятности на основе отклонения, формирование, для удаленного транспортного средства, траектории с использованием правдоподобия в качестве обновленного, и проезд, посредством рассматриваемого транспортного средства, по транспортной сети для транспортных средств с использованием информации транспортной сети для транспортных средств и траектории для удаленного транспортного средства.
[5] Другой аспект раскрытых вариантов осуществления представляет собой рассматриваемое транспортное средство, которое включает в себя процессор, выполненный с возможностью выполнять инструкции, сохраненные на некратковременном компьютерно-читаемом носителе, чтобы принимать информацию пространственного состояния удаленных транспортных средств для удаленного транспортного средства, идентифицировать информацию транспортной сети для транспортных средств, представляющую участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств, формировать, по меньшей мере, одно начальное значение вероятности на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств в начальной временной точке, причем каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, в информации транспортной сети для транспортных средств, формировать, для множества временных точек, включающих в себя начальную временную точку, отклонение удаленного транспортного средства между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств, обновлять, для каждой одной полосы движения и для каждого отклонения, правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, с использованием нового значения вероятности на основе отклонения, формировать, для удаленного транспортного средства, траекторию с использованием правдоподобия в качестве обновленного, и проезжать, с использованием рассматриваемого транспортного средства, по транспортной сети для транспортных средств с использованием информации транспортной сети для транспортных средств и траектории для удаленного транспортного средства.
[6] Еще один другой аспект раскрытых вариантов осуществления представляет собой устройство, включающее в себя некратковременное запоминающее устройство и процессор. Процессор выполнен с возможностью осуществлять инструкции, сохраненные в некратковременном запоминающем устройстве, чтобы принимать информацию пространственного состояния удаленных транспортных средств для удаленного транспортного средства, идентифицировать информацию транспортной сети для транспортных средств, представляющую участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств, формировать, по меньшей мере, одно начальное значение вероятности на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств в начальной временной точке, причем каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, в информации транспортной сети для транспортных средств, формировать, для множества временных точек, включающих в себя начальную временную точку, отклонение удаленного транспортного средства между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств, обновлять, для каждой одной полосы движения и для каждого отклонения, правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, с использованием нового значения вероятности на основе отклонения, формировать, для удаленного транспортного средства, траекторию с использованием правдоподобия в качестве обновленного, и проезжать, с использованием рассматриваемого транспортного средства, по транспортной сети для транспортных средств с использованием информации транспортной сети для транспортных средств и траектории для удаленного транспортного средства.
[7] Далее подробнее описываются варьирования этих и других аспектов, признаков, элементов, реализаций и вариантов осуществления способов, устройств, процедур и алгоритмов, раскрытых в данном документе.
Краткое описание чертежей
[8] Различные аспекты способов и устройств, раскрытых в данном документе, должны становиться более очевидными со ссылками на примеры, предоставленные в нижеприведенном описании, и на чертежи, на которых:
[9] Фиг. 1 является схемой примера участка транспортного средства, в котором могут реализовываться аспекты, признаки и элементы, раскрытые в данном документе;
[10] Фиг. 2 является схемой примера участка системы связи и транспортировки транспортных средств, в которой могут реализовываться аспекты, признаки и элементы, раскрытые в данном документе;
[11] Фиг. 3 является блок-схемой последовательности операций способа формирования проецируемой информации касательно транспортного средства для использования при проезде по транспортной сети для транспортных средств согласно идеям в данном документе;
[12] Фиг. 4A является схемой, иллюстрирующей удаленное транспортное средство в участке транспортной сети для транспортных средств в начальной временной точке для использования при формировании проецируемой информации касательно транспортного средства в соответствии с этим раскрытием сущности;
[13] Фиг. 4B является схемой, иллюстрирующей удаленное транспортное средство в участке транспортной сети для транспортных средств в последующей временной точке относительно временной точки по фиг. 4A для использования при формировании проецируемой информации касательно транспортного средства в соответствии с этим раскрытием сущности;
[14] Фиг. 4C является схемой, иллюстрирующей удаленное транспортное средство в участке транспортной сети для транспортных средств в последующей временной точке относительно временной точки по фиг. 4B для использования при формировании проецируемой информации касательно транспортного средства в соответствии с этим раскрытием сущности;
[15] Фиг. 5 является схемой, иллюстрирующей вычисление отклонения между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств;
[16] Фиг. 6 является схемой, иллюстрирующей формирование траектории удаленного транспортного средства во времени на основе среднего взвешенного траекторий, прогнозированных на основе скорости и кривизны карты;
[17] Фиг. 7 является схемой, иллюстрирующей функцию взвешивания, которая может использоваться для формирования траектории по фиг. 6;
[18] Фиг. 8 является схемой, иллюстрирующей формирование траектории удаленного транспортного средства во времени; и
[19] Фиг. 9 является схемой, иллюстрирующей рассматриваемое транспортное средство, проходящее по транспортной сети для транспортных средств с использованием информации транспортной сети для транспортных средств и траектории для удаленного транспортного средства.
Подробное описание изобретения
[20] Транспортное средство может двигаться из места отправления в место назначения в транспортной сети для транспортных средств. Когда транспортное средство движется в транспортной сети для транспортных средств, намерение при вождении других транспортных средств может быть полезной информацией. На уровне принятия решений автономного транспортного средства или инфраструктуры на дороге, такое намерение при вождении помогает в принятии обоснованных решений. Например, транспортное средство должно иметь возможность прогнозировать, что собираются делать объекты в окружении, перед составлением плана вождения (также называемого "планированием движения"). В качестве другого примера, инфраструктура может использовать прогнозирования, чтобы принимать решения в отношении того, какие из числа транспортных средств, въезжающих на перекресток, имеют приоритет на то, чтобы проезжать через перекресток.
[21] Что касается позиции, курса, ускорения транспортного средства и т.д., использование сонара, радара, лидара и т.д. хорошо подходит для стационарных объектов. Тем не менее, в этих системах, ни больше ни меньше, отсутствует возможность распознавать намерение водителя/транспортного средства, и они не могут формировать траекторию движущегося транспортного средства. Напротив, идеи в данном документе могут использовать эту информацию и/или обмен между транспортными средствами (V2V) базовым сообщением о соблюдении мер безопасности, содержащим, например, информацию местоположения, чтобы прогнозировать намерение при вождении транспортного средства. Ниже описываются подробности в сочетании с описанием окружений, в которых могут реализовываться идеи в данном документе.
[22] При использовании в данном документе, термин "компьютер" или "вычислительное устройство" включает в себя любой модуль или комбинацию модулей, допускающих осуществление любого способа либо любой его части или частей, раскрытых в данном документе.
[23] При использовании в данном документе, термин "процессор" указывает один или более процессоров, к примеру, один или более процессоров специального назначения, один или более процессоров цифровых сигналов, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, один или более процессоров приложений, одну или более специализированных интегральных схем, одну или более специализированных микросхем для массового производства; одну или более программируемых пользователем вентильных матриц, любой другой тип или комбинацию интегральных схем, один или более конечных автоматов либо любую комбинацию вышеозначенного.
[24] При использовании в данном документе, термин "запоминающее устройство" указывает любой компьютерно-используемый или компьютерно-читаемый носитель или устройство, которое может материально содержать, сохранять, передавать или транспортировать любой сигнал или информацию, которая может использоваться посредством или в связи с любым процессором. Например, запоминающее устройство может представлять собой одно или более постоянных запоминающих устройств (ROM), одно или более оперативных запоминающих устройств (RAM), один или более регистров, запоминающие устройства с удвоенной скоростью передачи данных и с низким уровнем мощности (LPDDR), одно или более устройств кэш-памяти, одно или более полупроводниковых запоминающих устройств, один или более магнитных носителей, один или более оптических носителей, один или более магнитооптических носителей либо любую комбинацию вышеозначенного.
[25] При использовании в данном документе, термин "инструкции" может включать в себя директивы или выражения для осуществления любого способа либо любой его части или частей, раскрытых в данном документе, и может быть реализован в аппаратных средствах, программном обеспечении или любой комбинации вышеозначенного. Например, инструкции могут реализовываться как информация, к примеру, как компьютерная программа, сохраненная в запоминающем устройстве, которая может выполняться посредством процессора, чтобы осуществлять любой из соответствующих способов, алгоритмов, аспектов или комбинаций вышеозначенного, как описано в данном документе. В некоторых вариантах осуществления, инструкции либо их часть могут реализовываться как процессор или схема специального назначения, которая может включать в себя специализированные аппаратные средства для осуществления любого из способов, алгоритмов, аспектов или комбинаций вышеозначенного, как описано в данном документе. В некоторых реализациях, части инструкций могут быть распределены по нескольким процессорам на одном устройстве, на нескольких устройствах, которые могут обмениваться данными непосредственно или по сети, к примеру, по локальной вычислительной сети, глобальной вычислительной сети, Интернету или комбинации вышеозначенного.
[26] При использовании в данном документе, термин "пример", "вариант осуществления", "реализация", "аспект", "признак" или "элемент" указывает "служащий в качестве примера, отдельного случая или иллюстрации". Если явно не указывается, любой пример, вариант осуществления, реализация, аспект, признак или элемент является независимым от другого примера, варианта осуществления, реализации, аспекта, признака или элемента и может использоваться в сочетании с любым другим примером, вариантом осуществления, реализацией, аспектом, признаком или элементом.
[27] При использовании в данном документе, термины "определять, "идентифицировать" и "формировать" либо их любые варьирования включают в себя выбор, выявление, вычисление, поиск, прием, определение, установление, получение либо иную идентификацию или определение любым способом с использованием одного или более устройств, показанных и описанных в данном документе.
[28] При использовании в данном документе, термин "или" имеет намерение означать включающее "или", а не исключающее "или". Таким образом, если не указано иное или не очевидно из контекста, "X включает в себя A или B" имеет намерение указывать любую из естественных включающих перестановок. Иными словами, если X включает в себя A; X включает в себя B; или X включает в себя как A, так и B, то "X включает в себя A или B" удовлетворяется в любом из вышеуказанных случаев. Помимо этого, указание формы единственного числа при использовании в данной заявке и прилагаемой формуле изобретения, в общем, должно истолковываться так, чтобы означать "один или более", если иное не указано или не очевидно из контекста.
[29] Дополнительно, для простоты пояснения, хотя чертежи и описания в данном документе могут включать в себя последовательности либо серии этапов или стадий, элементы способов, раскрытых в данном документе, могут осуществляться в различных порядках или параллельно. Дополнительно, элементы способов, раскрытых в данном документе, могут осуществляться с другими элементами, явно не представленными и описанными в данном документе. Кроме того, не все элементы способов, описанных в данном документе, могут требоваться для того, чтобы реализовывать способ в соответствии с этим раскрытием сущности. Хотя аспекты, признаки и элементы описываются в данном документе в конкретных комбинациях, каждый аспект, признак или элемент может использоваться независимо или в различных комбинациях с/без других аспектов, признаков и элементов.
[30] Фиг. 1 является схемой примера транспортного средства 1000, в котором могут реализовываться аспекты, признаки и элементы, раскрытые в данном документе. В некоторых вариантах осуществления, транспортное средство 1000 может включать в себя ходовую часть 1100, силовую цепь 1200, контроллер 1300, колеса 1400 либо любой другой элемент или комбинацию элементов транспортного средства. Хотя транспортное средство 1000 показано как включающее в себя четыре колеса 1400 для простоты, могут использоваться любое другое двигательное устройство или устройства, к примеру, гребной винт или гусеница. На фиг. 1, линии, соединяющие между собой элементы, такие как силовая цепь 1200, контроллер 1300 и колеса 1400, указывают то, что информация, к примеру, данные или управляющие сигналы, мощность, к примеру, электрическая мощность или крутящий момент, либо как информация, так и мощность могут передаваться между соответствующими элементами. Например, контроллер 1300 может принимать мощность из силовой цепи 1200 и может обмениваться данными с силовой цепью 1200, колесами 1400 или и с тем, и с другим, чтобы управлять транспортным средством 1000, что может включать в себя ускорение, замедление, руление или иное управление транспортным средством 1000.
[31] Силовая цепь 1200 может включать в себя источник 1210 мощности, трансмиссию 1220, модуль 1230 рулевого управления, актуатор (исполнительный механизм) 1240 либо любой другой элемент или комбинацию элементов силовой цепи, к примеру, подвеску, ведущий вал, оси или систему выпуска выхлопных газов. Хотя показаны отдельно, колеса 1400 могут быть включены в силовую цепь 1200.
[32] Источник 1210 мощности может включать в себя двигатель, аккумулятор или комбинацию вышеозначенного. Источник 1210 мощности может представлять собой любое устройство или комбинацию устройств, выполненных с возможностью предоставлять энергию, к примеру, электрическую энергию, тепловую энергию или кинетическую энергию. Например, источник 1210 мощности может включать в себя двигатель, к примеру, двигатель внутреннего сгорания, электромотор либо комбинацию двигателя внутреннего сгорания и электромотор, и может быть выполнен с возможностью предоставлять кинетическую энергию в качестве двигательной силы на одно или более колес 1400. В некоторых вариантах осуществления, источник 1210 мощности может включать в себя потенциальный модуль предоставления энергии, к примеру, один или более аккумуляторов на сухих элементах, таких как никель-кадмиевые (NiCd), никель-цинковые (NiZn), никель-металлогидридные (NiMH), литий-ионные (Li-ion); солнечные элементы; топливные элементы; или любое другое устройство, допускающее предоставление энергии.
[33] Трансмиссия 1220 может принимать энергию, к примеру, кинетическую энергию, из источника 1210 мощности и может передавать энергию на колеса 1400, чтобы предоставлять двигательную силу. Трансмиссия 1220 может управляться посредством модуля 1300 управления, актуатора 1240 или и того, и другого. Модуль 1230 рулевого управления может управляться посредством модуля 1300 управления, актуатора 1240 или и того, и другого и может управлять колесами 1400, чтобы рулить транспортным средством 1000. Актуатор 1240 транспортного средства может принимать сигналы из контроллера 1300 и может приводить в действие или управлять источником 1210 мощности, трансмиссией 1220, модулем 1230 рулевого управления либо любой комбинацией вышеозначенного, с тем чтобы управлять транспортным средством 1000.
[34] В некоторых вариантах осуществления, контроллер 1300 может включать в себя модуль 1310 определения местоположения, модуль 1320 электронной связи, процессор 1330, запоминающее устройство 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любую комбинацию вышеозначенного. Хотя показаны как один модуль, любые один или более элементов контроллера 1300 могут интегрироваться в любое число отдельных физических модулей. Например, пользовательский интерфейс 1350 и процессор 1330 могут интегрироваться в первом физическом модуле, и запоминающее устройство 1340 может интегрироваться во втором физическом модуле. Хотя не показано на фиг. 1, контроллер 1300 может включать в себя источник мощности, такой как аккумулятор. Хотя показаны как отдельные элементы, модуль 1310 определения местоположения, модуль 1320 электронной связи, процессор 1330, запоминающее устройство 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любая комбинация вышеозначенного могут интегрироваться в одном или более электронных модулей, схем или кристаллов.
[35] В некоторых вариантах осуществления, процессор 1330 может включать в себя любое устройство или комбинацию устройств, допускающих манипулирование или обработку сигнала либо другой информации, существующей сегодня или разработанной в дальнейшем, включающих в себя оптические процессоры, квантовые процессоры, молекулярные процессоры или комбинацию вышеозначенного. Например, процессор 1330 может включать в себя один или более процессоров специального назначения, один или более процессоров цифровых сигналов, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, одну или более интегральных схем, одну или более специализированных интегральных схем, одну или более программируемых пользователем вентильных матриц, одну или более программируемых логических матриц, один или более программируемых логических контроллеров, один или более конечных автоматов либо любую комбинацию вышеозначенного. Процессор 1330 может функционально соединяться с модулем 1310 определения местоположения, запоминающим устройством 1340, интерфейсом 1370 электронной связи, модулем 1320 электронной связи, пользовательским интерфейсом 1350, датчиком 1360, силовой цепью 1200 или любой комбинацией вышеозначенного. Например, процессор может функционально соединяться с запоминающим устройством 1340 через шину 1380 связи.
[36] Запоминающее устройство 1340 может включать в себя любой материальный некратковременный компьютерно-используемый или компьютерно-читаемый носитель, допускающий, например, содержание, хранение, передачу или транспортировку компьютерно-читаемых инструкций или любой информации, ассоциированной с ними, для использования посредством или в связи с процессором 1330. Запоминающее устройство 1340, например, может представлять собой один или более полупроводниковых накопителей, одну или более карт памяти, один или более съемных носителей, одно или более постоянных запоминающих устройств, одно или более оперативных запоминающих устройств, один или более дисков, включающих в себя жесткий диск, гибкий диск, оптический диск, магнитную или оптическую карту или любой тип некратковременных носителей, подходящих для того, чтобы сохранять электронную информацию, или любую комбинацию вышеозначенного.
[37] Интерфейс 1370 связи может представлять собой беспроводную антенну, как показано, порт проводной связи, порт оптической связи либо любой другой проводной или беспроводной модуль, допускающий связь с помощью интерфейса с проводной или беспроводной электронной средой связи 1500. Хотя фиг. 1 показывает интерфейс 1370 связи, обменивающийся данными через одну линию связи, интерфейс 1370 связи может быть выполнен с возможностью обмениваться данными через несколько линий связи.
[38] Модуль 1320 связи может быть выполнен с возможностью передавать или принимать сигналы через проводную или беспроводную среду 1500, к примеру, через интерфейс 1370 связи. Хотя не показано явно на фиг. 1, модуль 1320 связи может быть выполнен с возможностью передавать, принимать либо и то, и другое, через любой носитель/среду проводной или беспроводной связи, к примеру, через радиочастотный (RF), ультрафиолетовый (UV), в диапазоне видимого света, оптоволоконный, проводную линию либо комбинацию вышеозначенного. Хотя фиг. 1 показывает один модуль 1320 связи и один интерфейс 1370 связи, могут использоваться любое число модулей связи и любое число интерфейсов связи.
[39] Модуль 1310 определения местоположения может определять геолокационную информацию, такую как долгота, широта, высота над уровнем моря, направление движения или скорость, транспортного средства 1000. Например, модуль определения местоположения может включать в себя модуль глобальной системы позиционирования (GPS), к примеру, модуль по протоколу Национальной ассоциации морской электроники (NMEA) с поддержкой стандарта глобальной уточняющей системы (WAAS), радиомодуль триангуляции либо комбинацию вышеозначенного. Модуль 1310 определения местоположения может использоваться для того, чтобы получать информацию, которая представляет, например, текущий курс транспортного средства 1000, текущую позицию транспортного средства 1000 в двух или трех измерениях, текущую угловую ориентацию транспортного средства 1000 либо комбинацию вышеозначенного.
[40] Пользовательский интерфейс 1350 может включать в себя любой модуль, допускающий связь с помощью интерфейса с человеком, такой как виртуальная или физическая клавишная панель, сенсорная панель, дисплей, сенсорный дисплей, динамик, микрофон, видеокамера, датчик, принтер либо любую комбинацию вышеозначенного. Пользовательский интерфейс 1350 может функционально соединяться с процессором 1330, как показано, или с любым другим элементом контроллера 1300. Хотя показан как один модуль, пользовательский интерфейс 1350 может включать в себя один или более физических модулей. Например, пользовательский интерфейс 1350 может включать в себя аудиоинтерфейс для выполнения аудиосвязи с человеком и/или сенсорный дисплей для выполнения визуальной и сенсорной связи с человеком.
[41] Датчик 1360 зачастую включает в себя один или более датчиков 1360, к примеру, матрицу датчиков, которые могут быть выполнены с возможностью предоставлять информацию, которая может использоваться для того, чтобы управлять транспортным средством 1000. Датчик 1360 может предоставлять информацию относительно текущих рабочих характеристик транспортного средства. Когда включено несколько датчики 1360, они могут включать в себя, например, датчик скорости, датчики ускорения, датчик угла поворота при рулении, связанные с тягой датчики, связанные с торможением датчики или любой датчик либо комбинацию датчиков, которая выполнена с возможностью сообщать информацию относительно некоторого аспекта текущей динамической ситуации транспортного средства 1000.
[42] В некоторых вариантах осуществления, датчики 1360 могут включать в себя один или более датчиков, которые выполнены с возможностью получать информацию относительно физического окружения, окружающего транспортное средство 1000. Например, один или более датчиков 1360 могут обнаруживать геометрию дороги и помехи, к примеру, неподвижные помехи, транспортные средства и пешеходов. В некоторых вариантах осуществления, датчики 1360 могут представлять собой или включать в себя одну или более видеокамер, лазерных систем считывания, инфракрасных систем считывания, акустических систем считывания или любой другой подходящий тип бортового устройства считывания состояния окружающей среды либо комбинацию устройств, известных на сегодня или разработанных в дальнейшем. В некоторых вариантах осуществления, датчики 1360 и модуль 1310 определения местоположения могут комбинироваться.
[43] Хотя не показано отдельно, в некоторых вариантах осуществления, транспортное средство 1000 может включать в себя контроллер траектории. Контроллер траектории может быть выполнен с возможностью получать информацию, описывающую текущее состояние транспортного средства 1000 и маршрут, запланированный для транспортного средства 1000, и на основе этой информации, определять и оптимизировать траекторию для транспортного средства 1000. В некоторых вариантах осуществления, контроллер траектории может выводить сигналы, выполненные с возможностью управлять транспортным средством 1000 таким образом, что транспортное средство 1000 придерживается траектории, которая определяется посредством контроллера траектории. Например, вывод контроллера траектории может представлять собой оптимизированную траекторию, которая может подаваться в силовую цепь 1200, колеса 1400 или и в то, и в другое. В некоторых вариантах осуществления, оптимизированная траектория может представлять собой вводы управления, такие как набор углов поворота при рулении, причем каждый угол поворота при рулении соответствует точке времени или позиции. В некоторых вариантах осуществления, оптимизированная траектория может представлять собой одну или более полос движения, линий, кривых, путей или комбинацию вышеозначенного. Контроллер траектории может реализовываться, по меньшей мере, частично, с использованием одного или более элементов контроллера 1300.
[44] Одно или более колес 1400 могут представлять собой ведущее колесо, которое может поворачиваться до угла поворота при рулении под управлением модуля 1230 рулевого управления, движимое колесо, которое может снабжаться крутящим моментом, чтобы приводить в движение транспортное средство 1000 под управлением трансмиссии 1220, или ведущее и движимое колесо, которое может осуществлять руление и приводить в движение транспортное средство 1000.
[45] Хотя не показано на фиг. 1, транспортное средство 1000 может включать в себя модули или элементы, не показанные на фиг. 1, такие как корпус, Bluetooth®-модуль, частотно-модулированный (FM) радиомодуль, модуль связи ближнего радиуса действия (NFC), модуль отображения на основе жидкокристаллического дисплея (LCD), модуль отображения на органических светодиодах (OLED), динамик либо любую комбинацию вышеозначенного.
[46] Фиг. 2 является схемой примера участка системы связи и транспортировки транспортных средств, в которой могут реализовываться аспекты, признаки и элементы, раскрытые в данном документе. Система 2000 связи и транспортировки транспортных средств может включать в себя, по меньшей мере, два транспортных средства 2100/2110, каждое из которых может быть сконфигурировано аналогично транспортному средству 1000, показанному на фиг. 1, которые движутся через один или более участков одной или более транспортных сетей 2200 для транспортных средств и могут обмениваться данными через одну или более сетей 2300 электронной связи. Хотя не показано явно на фиг. 2, транспортное средство может проезжать по зоне, которая не включена явно или полностью в транспортную сеть для транспортных средств, к примеру, по внедорожной зоне.
[47] В некоторых вариантах осуществления, сеть 2300 электронной связи, например, может представлять собой систему с множественным доступом и может предоставлять связь, к примеру, речевую связь, обмен данными, видеосвязь, обмен сообщениями или комбинацию вышеозначенного, между каждым транспортным средством 2100/2110 и одним или более обменивающихся данными устройств 2400. Например, транспортное средство 2100/2110 может принимать информацию, к примеру, информацию, представляющую транспортную сеть 2200 для транспортных средств, из обменивающегося данными устройства 2400 через сеть 2300. В конкретных вариантах осуществления, описанных в данном документе, сеть 2300 электронной связи может использоваться при связи между транспортными средствами на предмет базового сообщения о соблюдении мер безопасности, содержащего информацию местоположения и траектории транспортного средства 2100. Каждое транспортное средство 2100/2110 также может передавать эту информацию непосредственно в одно или более других транспортных средств, как подробнее описано ниже.
[48] В некоторых вариантах осуществления, транспортное средство 2100/2110 может обмениваться данными через линию проводной связи (не показана), линию 2310/2320/2370 беспроводной связи или комбинацию любого числа линий проводной или беспроводной связи. Например, как показано, транспортное средство 2100/2110 может обмениваться данными через линию 2310 наземной беспроводной связи, через линию 2320 неназемной беспроводной связи либо через комбинацию вышеозначенного. В некоторых реализациях, линия 2310 наземной беспроводной связи может включать в себя Ethernet-линию связи, линию последовательной передачи данных, линию связи по технологии Bluetooth, линию инфракрасной (IR) связи, линию ультрафиолетовой связи или любую линию связи, допускающую предоставление электронной связи.
[49] В некоторых вариантах осуществления, транспортное средство 2100/2110 может обмениваться данными с другим транспортным средством 2100/2110. Например, данное или рассматриваемое транспортное средство 2100 (HV) может принимать одно или более автоматизированных сообщений между транспортными средствами, к примеру, базовое сообщение о соблюдении мер безопасности, из удаленного или целевого транспортного средства 2110 (RV), через прямую линию 2370 связи или через сеть 2300. Например, удаленное транспортное средство 2110 может передавать в широковещательном режиме сообщение в рассматриваемые транспортные средства в пределах заданного широковещательного диапазона, к примеру, в 300 метров. В некоторых вариантах осуществления, рассматриваемое транспортное средство 2100 может принимать сообщение через третью сторону, к примеру, через повторитель сигналов (не показан) или другое удаленное транспортное средство (не показано). В некоторых вариантах осуществления, транспортное средство 2100/2110 может периодически передавать одно или более автоматизированных сообщений между транспортными средствами на основе заданного интервала, к примеру, в 100 миллисекунд.
[50] Автоматизированные сообщения между транспортными средствами могут включать в себя идентификационную информацию транспортного средства, информацию пространственного состояния, такую как информация долготы, широты и/или высоты над уровнем моря, информацию точности определения геопространственного местоположения, информацию кинематического состояния, такую как информация ускорения транспортного средства, информация скорости относительно вертикальной оси, информация скорости, информацию курса транспортного средства, информацию состояния тормозной системы, информацию дросселя, информацию угла поворота руля или информацию составления маршрутов транспортного средства, или информацию рабочего состояния транспортного средства, такую как информация размера транспортного средства, информация состояния передних фар, информация сигнала поворота, информация состояния стеклоочистителя, информация трансмиссии либо любую другую информацию или комбинацию информации, релевантной для состояния передающего транспортного средства. Например, информация состояния трансмиссии может указывать то, находится передающее транспортное средство в состоянии нейтрали, припаркованном состоянии, состоянии переднего хода или состоянии заднего хода.
[51] Некоторые или вся вышеприведенная информация относительно рассматриваемого транспортного средства 2100 и/или удаленного транспортного средства 2110 может приниматься из датчиков, а не из автоматизированных сообщений между транспортными средствами. В качестве одного примера, модуль 1320 связи может принимать сонарные, радарные и/или лидарные сигналы, из которых может вычисляться позиция, скорость, ускорение и мгновенный курс транспортного средства.
[52] В некоторых вариантах осуществления, транспортное средство 2100 может обмениваться данными с сетью 2300 связи через точку 2330 доступа. Точка 2330 доступа, которая может включать в себя вычислительное устройство, может быть выполнена с возможностью обмениваться данными с транспортным средством 2100, с сетью связи 2300, с одним или более устройств 2400 связи либо с комбинацией вышеозначенного через линии 2310/2340 проводной или беспроводной связи. Например, точка 2330 доступа может представлять собой базовую станцию, базовую приемо-передающую станцию (BTS), узел B (Node-B), усовершенствованный узел B (eNode-B), собственный узел B (HNode-B), беспроводной маршрутизатор, проводной маршрутизатор, концентратор, ретранслятор, коммутатор либо любое аналогичное проводное или беспроводное устройство. Хотя показан как один модуль, точка доступа может включать в себя любое число взаимно соединенных элементов.
[53] В некоторых вариантах осуществления, транспортное средство 2100 может обмениваться данными с сетью 2300 связи через спутник 2350 или другое устройство неназемной связи. Спутник 2350, который может включать в себя вычислительное устройство, может быть выполнен с возможностью обмениваться данными с транспортным средством 2100, с сетью связи 2300, с одним или более устройств 2400 связи либо с комбинацией вышеозначенного через одну или более линий 2320/2360 связи. Хотя показан как один модуль, спутник может включать в себя любое число взаимно соединенных элементов.
[54] Транспортное средство 2110 может аналогично обмениваться данными с сетью 2300 связи через точку 2330 доступа и/или спутник 2350.
[55] Сеть 2300 электронной связи может представлять собой любой тип сети, выполненной с возможностью предоставлять голос, данные или любой другой тип электронной связи. Например, сеть 2300 электронной связи может включать в себя локальную вычислительную сеть (LAN), глобальную вычислительную сеть (WAN), виртуальную частную сеть (VPN), мобильную или сотовую телефонную сеть, Интернет либо любую другую систему электронной связи. Сеть 2300 электронной связи может использовать протокол связи, к примеру, протокол управления передачей (TCP), протокол пользовательских датаграмм (UDP), Интернет-протокол (IP), транспортный протокол реального времени (RTP) протокол передачи гипертекста (HTTP) либо комбинацию вышеозначенного. Хотя показан как один модуль, сеть электронной связи может включать в себя любое число взаимно соединенных элементов.
[56] В некоторых вариантах осуществления, транспортное средство 2100 может идентифицировать участок или состояние транспортной сети 2200 для транспортных средств. Например, транспортное средство может включать в себя один или более бортовых датчиков 2150, к примеру, датчик 1360, показанный на фиг. 1, который может включать в себя датчик скорости, датчик скорости вращения колес, камеру, гироскоп, оптический датчик, лазерный датчик, радарный датчик, акустический датчик или любой другой датчик или устройство либо комбинацию вышеозначенного, допускающую определение или идентификацию участка или состояния транспортной сети 2200 для транспортных средств.
[57] В некоторых вариантах осуществления, транспортное средство 2100 может проезжать по участку или участкам одной или более транспортных сетей 2200 для транспортных средств с использованием информации, передаваемой через сеть 2300, к примеру, информацией, представляющей транспортную сеть 2200 для транспортных средств, информацией, идентифицированной посредством одного или более бортовых датчиков 2150, либо комбинации вышеозначенного.
[58] Хотя, для простоты, фиг. 2 показывает одну транспортную сеть 2200 для транспортных средств, могут использоваться одна сеть 2300 электронной связи и одно устройство 2400 связи, любое число сетей или устройств связи. В некоторых вариантах осуществления, система 2000 связи и транспортировки транспортных средств может включать в себя устройства, модули или элементы, не показанные на фиг. 2. Хотя каждое транспортное средство 2100/2110 показано как один модуль, транспортное средство может включать в себя любое число взаимно соединенных элементов.
[59] Хотя транспортное средство 2100 показано как обменивающееся данными с устройством 2400 связи через сеть 2300, транспортное средство 2100 и/или транспортное средство 2110 могут обмениваться данными с устройством 2400 связи через любое число прямых или косвенных линий связи. Например, каждое транспортное средство 2100/2110 может обмениваться данными с устройством 2400 связи через прямую линию связи, к примеру, линию Bluetooth-связи.
[60] Фиг. 3 является блок-схемой последовательности операций способа формирования проецируемой информации касательно транспортного средства для использования при проезде по транспортной сети для транспортных средств согласно идеям в данном документе. В некоторых вариантах осуществления, способ может реализовываться в транспортном средстве, к примеру, в транспортном средстве 1000, показанном на фиг. 1, или в транспортных средствах 2100/2110, показанных на фиг. 2. В других вариантах осуществления, способ может реализовываться полностью или частично внешне относительно транспортных средств, к примеру, в одном или более процессоров устройства 2400 связи, с передачей релевантной информации, такой как траектория удаленного транспортного средства или сформированный маршрут, в одно или более транспортных средств.
[61] В некоторых вариантах осуществления, способ включает в себя прием информации касательно удаленного транспортного средства на этапе 3000, идентификацию информации транспортной сети для транспортных средств на этапе 3010, формирование начального значения вероятности для одной или более полос движения в информации транспортной сети для транспортных средств на этапе 3020, формирование отклонений в транспортном средстве вдоль полос движения для последующих временных точек на этапе 3030, обновление значений вероятностей для полос движения на этапе 3040, формирование траектории удаленного транспортного средства во времени на этапе 3050 и проезд по транспортной сети для транспортных средств с использованием траектории удаленного транспортного средства в качестве ввода на этапе 3060.
[62] Рассматриваемое транспортное средство принимает информацию касательно удаленного транспортного средства при проезде по участку транспортной сети для транспортных средств на этапе 3000. Информация касательно удаленного транспортного средства, принимаемая посредством рассматриваемого транспортного средства на этапе 3000, включает в себя информацию пространственного состояния удаленных транспортных средств и может включать в себя информацию кинематического состояния удаленного транспортного средства для удаленного транспортного средства или данные, из которых может формироваться эта информация. Информация пространственного состояния удаленных транспортных средств может включать в себя, например, геопространственные координаты для удаленного транспортного средства. Эти координаты могут представлять собой GPS-координаты для широты и долготы удаленного транспортного средства в некоторых вариантах осуществления. Информация кинематического состояния удаленного транспортного средства может включать в себя скорость, ускорение, курсовой угол и т.д. или информацию, из которой может определяться эта информация.
[63] Например, информация пространственного состояния удаленных транспортных средств может приниматься посредством импорта информации из одного или более наборов данных. В одном примере, информация импортируется из сигналов, отправленных через беспроводную среду 1500 электронной связи из модуля 1310 определения местоположения по фиг. 1. Информация может быть ассоциирована с записями из одного удаленного транспортного средства или нескольких удаленных транспортных средств. Каждая запись в наборе данных может быть ассоциирована с идентификатором транспортного средства, и отдельные удаленные транспортные средства могут уникально идентифицироваться на основе идентификаторов транспортного средства. Записи также могут включать в себя метки даты и времени и могут извлекаться периодически или по мере необходимости, к примеру, когда изменяется транспортная сеть для транспортных средств, по которой движется транспортное средство.
[64] В некоторых вариантах осуществления, информация пространственного состояния удаленных транспортных средств может приниматься из местоположения инфраструктурного устройства в транспортной сети для транспортных средств. Такие инфраструктурные устройства могут включать в себя интеллектуальные устройства, к примеру, светофор, дорожный датчик, дорожную камеру или любое другое устройство не из транспортного средства, ассоциированное с транспортной сетью для транспортных средств и допускающее обнаружение транспортного средства.
[65] В некоторых вариантах осуществления, информация пространственного состояния удаленных транспортных средств может приниматься из портативного устройства в то время, когда оно ассоциировано с транспортным средством. Например, портативное устройство, такое как смартфон, носимый пассажиром транспортного средства, может включать в себя информацию географического местоположения, к примеру, информацию GPS или с использованием GPS (AGPS), и может включать в себя информацию, ассоциирующую пассажира с транспортным средством.
[66] Сбор информации пространственного состояния транспортного средства не ограничен какой-то конкретной технологией при условии, что технология может ассоциировать информацию пространственного состояния транспортного средства, по меньшей мере, с еще одним фрагментом информации, таким как время и конкретное удаленное транспортное средство. Например, сонар, радар и/или лидар, смонтированный на транспортных средствах или инфраструктурных устройствах, могут предоставлять ввод, который может использоваться для того, чтобы вычислять или иным образом формировать информацию пространственного состояния транспортного средства на этапе 3000.
[67] Аналогичные технологии могут использоваться для того, чтобы принимать информацию кинематического состояния удаленного транспортного средства. Например, когда удаленное транспортное средство остается в идентичном местоположении между двумя измерениями, можно определять то, что удаленное транспортное средство не перемещается. Напротив, когда информация пространственного состояния удаленных транспортных средств отличается для удаленного транспортного средства между двумя измерениями, информация и количество времени между двумя измерениями могут использоваться для того, чтобы формировать скорость удаленного транспортного средства.
[68] В некоторых реализациях, информация касательно удаленного транспортного средства, принимаемая посредством рассматриваемого транспортного средства на этапе 3000, может иметь форму автоматизированных сообщений между транспортными средствами, описанных выше. Информация может приниматься полностью или частично через специализированную ближнюю связь (DSRC) в ближней беспроводной связи между транспортным средством и инфраструктурой (V2I) и между транспортными средствами (V2V).
[69] Информация касательно удаленного транспортного средства может сохраняться в запоминающем устройстве рассматриваемого транспортного средства или в другом месте для последующей обработки и может сохраняться с временной меткой. Опционально, информация рассматриваемого транспортного средства может приниматься и сохраняться с использованием аналогичных технологий. Хотя не показано явно на фиг. 3, необработанные наблюдения (например, местоположение и скорость) могут фильтроваться, чтобы минимизировать шум и искажение сигналов.
[70] На этапе 3010, идентифицируется информация транспортной сети для транспортных средств, которая представляет участок транспортной сети для транспортных средств. Идентификационные данные могут быть основаны на информации пространственного состояния удаленных транспортных средств, и удаленное транспортное средство расположено в информации транспортной сети для удаленных транспортных средств.
[71] Транспортная сеть для транспортных средств может включать в себя одну или более непригодных для навигации зон, таких как здание, одну или более частично пригодных для навигации зон, таких как зона парковки, одну или более пригодных для навигации зон, таких как дороги, либо комбинацию вышеозначенного. Транспортная сеть для транспортных средств может включать в себя один или более переходов между одной или более пригодных для навигации или частично пригодных для навигации зон. Участок транспортной сети для транспортных средств, такой как дорога, может включать в себя одну или более полос движения и может быть ассоциирован с одним более направлений движения. Полосы движения могут быть маркированными или не маркированными.
[72] В некоторых вариантах осуществления, транспортная сеть для транспортных средств либо ее участок, к примеру, участок транспортной сети для транспортных средств, поясненной в дальнейшем в этом документе, может представляться как информация транспортной сети для транспортных средств. Например, информация транспортной сети для транспортных средств может выражаться как иерархия элементов, таких как элементы языка разметки, которые могут сохраняться в базе данных или файле. Для простоты, чертежи в данном документе иллюстрируют информацию транспортной сети для транспортных средств, представляющую участки транспортной сети для транспортных средств, в качестве схем или карт; тем не менее, информация транспортной сети для транспортных средств может выражаться в любой компьютерно-применимой форме, допускающей представление транспортной сети для транспортных средств либо ее участка. В некоторых вариантах осуществления, информация транспортной сети для транспортных средств может включать в себя управляющую информацию транспортной сети для транспортных средств, такую как информация направления движения, информация об ограничении скорости, информация платы за проезд, информацию уклона, такую как информация наклона или угла, информацию материалов поверхности, эстетическую информацию либо комбинацию вышеозначенного.
[73] В некоторых вариантах осуществления, транспортная сеть для транспортных средств может быть ассоциирована или может включать в себя транспортную сеть для пешеходного движения, такую как пешеходный крытый переход или тротуар, либо транспортную сеть для велосипедного движения, такую как одна или более велосипедных дорожек. Транспортная сеть для пешеходного движения может соответствовать непригодной для навигации зоне или частично пригодной для навигации зоне транспортной сети для транспортных средств. Аналогично, транспортная сеть для велосипедного движения может соответствовать непригодной для навигации зоне или частично пригодной для навигации зоне транспортной сети для транспортных средств. Хотя описание здесь использует электромоторное транспортное средство, идеи являются применимыми к другим транспортным средствам, которые движутся по заданной полосе движения в транспортной сети для транспортных средств, таким как мопед или мотоцикл.
[74] Фиг. 4A является схемой, иллюстрирующей удаленное транспортное средство в участке транспортной сети для транспортных средств в начальной временной точке для использования при формировании проецируемой информации касательно транспортного средства в соответствии с этим раскрытием сущности. Как упомянуто выше, информация транспортной сети для транспортных средств, которая представляет участок транспортной сети для транспортных средств, может идентифицироваться на основе информации пространственного состояния удаленных транспортных средств. Участок может включать в себя, в дополнение к текущей полосе движения, в которой движется удаленное транспортное средство, последующие и предшествующие полосы движения относительно текущей полосы движения и любые смежные полосы движения (также называемые "родственными полосами движения"), которые находится около удаленного транспортного средства. Участок может иметь заданное расстояние или может быть переменным на основе скорости движения удаленного транспортного средства. Например, участок может идентифицироваться на основе радиуса, заданного посредством того, насколько далеко удаленное транспортное средство может двигаться при своей текущей скорости.
[75] Для простоты пояснения, фиг. 4A показывает только две полосы движения или полосы 4100, 4200 движения, идущие из общей полосы 4000 движения, не имеющие родственных полос движения. Также показана центральная линия 4210 полосы 4200 движения. Удаленное транспортное средство 4300 расположено в участке информации транспортной сети для транспортных средств в начальной временной точке, причем это местоположение представляется как точка A. Местоположение на полосе движения может упоминаться как положение удаленного транспортного средства. Чтобы представлять удаленное транспортное средство в информации транспортной сети для транспортных средств, информация пространственного состояния удаленных транспортных средств и информация транспортной сети для транспортных средств должны идентифицироваться в идентичной системе координат. С этой целью, координаты информации пространственного состояния удаленных транспортных средств преобразуются в общую систему координат. Общая система координат, в некоторых вариантах осуществления, может представлять собой систему координат в универсальной поперечной меркаторской проекции (UTM), так что точки ввода преобразуются в UTM-координаты в каждой UTM-зоне. Например, когда информация пространственного состояния транспортного средства импортируется в качестве GPS-координат, информация пространственного состояния транспортного средства, идентифицированная из наборов данных, может преобразовываться в UTM-координаты согласно известным формулам преобразования. Другие системы координат являются возможными при условии, что выбранная система используется согласованно.
[76] Снова ссылаясь на фиг. 3, способ переходит к этапу 3020 после идентификации информации транспортной сети для транспортных средств на этапе 3010. На этапе 3020, по меньшей мере, одно начальное значение вероятности формируется на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств в начальной временной точке. Каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, в информации транспортной сети для транспортных средств. Оно также может рассматриваться как вероятность того, что транспортное средство придерживается ориентации конкретной полосы движения, или как состояние намерения при вождении. Когда удаленное транспортное средство находится на перекрестке, например, состояние намерения при вождении может представлять собой движение в прямом направлении, поворачивать налево или поворачивать направо. Когда удаленное транспортное средство находится на дороге (не на перекрестке), состояние намерения при вождении может представлять собой движение в прямом направлении, выполнять смену полосы движения влево или выполнять смену полосы движения вправо.
[77] Как показано в примере по фиг. 4A, удаленное транспортное средство 4300 находится в местоположении, идентифицированном посредством точки A в начальной временной точке (также вызывается "первой точкой вычисления или первой точкой"). Первая точка вычисления может представлять собой любую точку в последовательности принимаемых данных для удаленного транспортного средства. Оно может быть расположено, например, в первой точке, в которой обнаруживается или назначается уникальный идентификатор, ассоциированный с удаленным транспортным средством. Начальное значение вероятности в первой точке вычисления может формироваться любым числом способов. В качестве одного примера, когда удаленное транспортное средство находится на полосе движения или полосе движения, имеющей родственные полосы движения, начальное значение вероятности равно 1, поскольку правдоподобие движения в прямом направлении составляет 100%. Когда удаленное транспортное средство находится на перекрестке, вероятности могут логически выводиться на основе потенциальных вариантов, доступных для транспортного средства в первой точке вычисления. На фиг. 4A, например, имеется только два состояния намерения при вождении на перекрестке (движение в прямом направлении, чтобы придерживаться полосы движения или полосы 4100 движения, или поворот направо, чтобы придерживаться полосы движения или полосы 4200 движения). Таким образом, вероятность движения в прямом направлении или поворота направо равна 0,5. Если имеется три полосы движения на перекрестке, эта простая формула оценки вероятности должна приводить к вероятности каждого из трех состояний намерения при вождении (движение в прямом направлении, поворот налево и поворот направо), равной 1/3.
[78] В некоторых варьированиях, правдоподобия могут варьироваться на основе других переменных. В качестве одного примера, в котором удаленное транспортное средство отправляет V2V- или V2I-сигнал, этот сигнал зачастую включает в себя другие данные. Сигнал поворота может использоваться для того, чтобы присваивать больший весовой коэффициент одному состоянию намерения при вождении относительно другого. Другими словами, могут возникать ситуации, в которых удаленное транспортное средство находится в позиции, или возникают другие обстоятельства, так что вероятности неравномерно распределяются между возможными вариантами.
[79] Снова ссылаясь на фиг. 3, после того, как начальное значение вероятности для каждой полосы движения формируется на этапе 3020, отклонения в информации пространственного состояния удаленных транспортных средств формируются для последующих временных точек на этапе 3030, и для каждой одной полосы движения, значения вероятностей для полос движения обновляются на этапе 3040. Эти этапы кратко поясняются со ссылкой на фиг. 4B и 4C, и далее приводится более подробное пояснение со ссылкой на фиг. 5. Хотя обработка на этапе 3030 и на этапе 3040 осуществляется для каждой одной полосы движения, по которой может двигаться удаленное транспортное средство, пояснение предоставляется только относительно одной полосы движения. Другие полосы движения могут обрабатываться аналогично.
[80] Фиг. 4B является схемой, иллюстрирующей удаленное транспортное средство 4300 в участке транспортной сети для транспортных средств в последующей временной точке относительно временной точки по фиг. 4A, и фиг. 4C является схемой, иллюстрирующей удаленное транспортное средство 4300 в участке транспортной сети для транспортных средств в последующей временной точке относительно временной точки по фиг. 4B. Таким образом, удаленное транспортное средство 4300 продолжает двигаться после того, как оно расположено в первой точке A на фиг. 4A и идентифицируется посредством информации пространственного состояния удаленных транспортных средств во второй точке B на фиг. 4B и затем в третьей точке C на фиг. 4C. Удаленное транспортное средство 4300 движется еще дальше от центральной линии 4210 полосы 4200 движения при продвижении вперед от первой точки A ко второй точке B и затем движется ближе к центральной линии 4210 полосы 4200 движения при продвижении вперед от второй точки B к третьей точке C. Интуитивно, в таком случае, вероятность того, что удаленное транспортное средство 4200 должно придерживаться полосы 4200 движения, уменьшается во второй точке B и увеличивается в третьей точке C. Отклонение удаленного транспортного средства 4200 между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств может формироваться и использоваться для того, чтобы формировать новую вероятность во времени.
[81] Более конкретно, отклонение может формироваться посредством определения местоположения пунктирной линии 4400, которая идет параллельно с центральной линией 4210 полосы 4200 движения из евклидовой линии 4500 между второй точкой B и центральной линией 4210 полосы 4200 движения в первую точку A. Разность между второй точкой B и точкой, в которой первая точка A проецируется на евклидову линию 4500 посредством пунктирной линии 4400, представляет отклонение в траектории удаленного транспортного средства 4300 от первой точки A ко второй точке B. Аналогично, следующее отклонение может формироваться посредством нахождения пунктирной линии 4600, которая идет параллельно с центральной линией 4210 полосы 4200 движения от третьей точки C к евклидовой линии 4500 между второй точкой B и центральной линией 4210 полосы 4200 движения. Разность между второй точкой B и точкой, в которой третья точка C проецируется на евклидову линию 4500 посредством пунктирной линии 4600, представляет отклонение в траектории удаленного транспортного средства 4300 от второй точки B к третьей точке C. Альтернативно, евклидова линия может идти от центральной линии 4210 к третьей точке C (аналогично линии 4500 через вторую точку B), и параллельная линия может проецироваться вперед от второй точки B к этой евклидовой линии. Затем разность между третьей точкой C и точкой, в которой вторая точка B проецируется на евклидову линию посредством параллельной линии, также представляет отклонение в траектории удаленного транспортного средства 4300 от второй точки B к третьей точке C. Эти отклонения также могут упоминаться как относительные отклонения.
[82] После того, как отклонения формируются на этапе 3030, значения вероятностей могут обновляться на этапе 3040. Таким образом, для каждой одной полосы движения и для каждого отклонения, правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, может обновляться с использованием нового значения вероятности на основе отклонения. Например, вероятность придерживания полосы 4200 движения в первой точке A составляет 0,5. Новое значение вероятности на основе относительного отклонения между первой точкой A и второй точкой B, например, может представлять собой вероятность отклонения от предыдущей точки. В качестве иллюстрации, используется значение 0,8. Обновленное правдоподобие в силу этого составляет 0,5×0,8=0,4, что соответствует такому интуитивному результату, что правдоподобие того, что удаленное транспортное средство придерживается полосы 4200 движения во второй точке B по сравнению с первой точкой A, уменьшается. Аналогично, новое значение вероятности на основе относительного отклонения между второй точкой B и третьей точкой C может представлять собой вероятность отклонения от предыдущей точки. В качестве иллюстрации, используется значение 0,5. В этом вычислении, обновленное правдоподобие составляет 0,4 (правдоподобие во второй точке B)/0,5=0,8, что соответствует такому интуитивному результату, что правдоподобие того, что удаленное транспортное средство придерживается полосы 4200 движения, увеличивает в третьей точке C по сравнению со второй точкой B. Следует отметить, что новое значение вероятности используется для того, чтобы делить правдоподобие в предыдущей точке, поскольку удаленное транспортное средство 4300 приближается к центральной линии 4210, так что обновленное правдоподобие должно увеличиваться.
[83] Простой пример фиг. 4A-4C иллюстрирует использование относительного отклонения в обновлении правдоподобия того, что удаленное транспортное средство придерживается конкретной полосы движения. Тем не менее, требуется схема вычисления, которая связывает отклонения с вероятностями. Могут использоваться несколько функций. Тем не менее, в данном документе предполагается, что поперечное распределение точек вдоль центральной линии, к примеру, центральной линии 4210, является гауссовым. Следовательно, кумулятивная функция распределения гауссиана используется для того, чтобы связывать отклонения с вероятностями. В функции нормального распределения со средним значением в 0 и среднеквадратическим отклонением (σ) в 1,0, 68,27% значений составляют в пределах 1σ от среднего значения, 95,45% значений составляют в пределах 2σ от среднего значения, и 99,73% значений составляют в пределах 3σ от среднего значения. С использованием левой половины кумулятивной функции распределения (cdf) для иллюстрации, когда x представляет отклонение от среднего значения, в результате получаются следующие соответствия:
 ;
;
 ; и
; и
 .
.
[84] Таким образом, используемая вероятностная функция f(x) является следующей:
 .
.
[85] Поскольку только половина функции рассматривается, умножение кумулятивной функции распределения на два (2) масштабирует максимальную вероятность от 0,5 до 1. Желательно, если значения x попадают в заданный диапазон, к примеру,  , так что когда удаленное транспортное средство перемещается к левой или правой границе полосы движения, вероятность того, что оно придерживается полосы движения, имеет значение около 0. Это может достигаться посредством задания σ для конкретной полосы движения в качестве
, так что когда удаленное транспортное средство перемещается к левой или правой границе полосы движения, вероятность того, что оно придерживается полосы движения, имеет значение около 0. Это может достигаться посредством задания σ для конкретной полосы движения в качестве  , где Lane Width является шириной (например, 12 футов) полосы движения. Например, когда транспортное средство перемещается к границе полосы движения, где
, где Lane Width является шириной (например, 12 футов) полосы движения. Например, когда транспортное средство перемещается к границе полосы движения, где  , вероятность придерживания полосы движения является очень близкой к нулю, поскольку x составляет 3σ.
, вероятность придерживания полосы движения является очень близкой к нулю, поскольку x составляет 3σ.
[86] Использование вероятностной функции f(x) для того, чтобы обновлять правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, описывается со ссылкой на фиг. 5, который иллюстрирует вычисление отклонения между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств. Фиг. 5 использует положительные значения для отклонения влево и отрицательные значения для отклонения вправо в качестве примера (то, какая сторона является положительной, не затрагивает технологию). Показана одна полоса 5000 движения, которая имеет левую границу 5010 полосы движения, правую границу 5020 полосы движения и центральную линию 5030. Центральная линия 5030 чаще всего не помечается или показывается в традиционных картографических данных и может задаваться для целей данного документа в качестве средней точки между левой границей 5010 полосы движения и правой границей 5020 полосы движения.
[87] На фиг. 5, сплошная линия 5100 указывает траекторию транспортного средства вдоль полосы 5000 движения. Транспортное средство наблюдается в точках A, B, C, D, E, F во времени (т.е. в белых точках). Черные точки отмечают точку на центральной линии 5030, которая является ближайшей к местоположению транспортного средства в момент наблюдения. Как упомянуто кратко относительно фиг. 4B и 4C, это задает евклидову линию. Евклидово расстояние между соответствующими белыми и черными точками представляет собой отклонение транспортного средства от центральной линии 5030 в момент наблюдения. Тем не менее, оно представляет собой отклонение между точками, которое представляет интерес.
[88] Согласно обработке по фиг. 3, предполагается, что удаленное транспортное средство сначала наблюдается в точке A. Точка A представляет собой точку, в которой начальное значение вероятности для полосы 5000 движения формируется на этапе 3020. Здесь, показана вероятность движения в прямом направлении 1,0 в качестве только одной полосы движения.
[89] На этапе 3030, формируются отклонения для последующих временных точек. Например, каждое отклонение может вычисляться для новой точки посредством прохождения евклидовой линии через новую точку и центральную линию, прохождения линии от предыдущей точки к евклидовой линии и вычисления разности между новой точкой и точкой, в которой предыдущая точка пересекает евклидову линию.
Тем не менее, на фиг. 5, отклонения вычисляются аналогично тому, как описано относительно фиг 4B и 4C.
Отклонение транспортного средства от центральной линии 5030 в точке A составляет 
 , и отклонение транспортного средства от центральной линии 5030 в точке B составляет
, и отклонение транспортного средства от центральной линии 5030 в точке B составляет  . Соответственно, изменение отклонения
. Соответственно, изменение отклонения  от точки A до точки B вычисляется как
от точки A до точки B вычисляется как  . Она представляет собой разность между точкой B и точкой, в которой точка A проецируется на евклидову линию 5250 посредством параллельной линии 5200. Отклонение транспортного средства от центральной линии 5030 в точке C составляет
. Она представляет собой разность между точкой B и точкой, в которой точка A проецируется на евклидову линию 5250 посредством параллельной линии 5200. Отклонение транспортного средства от центральной линии 5030 в точке C составляет  , так что изменение отклонения от точки B до точки C вычисляется как
, так что изменение отклонения от точки B до точки C вычисляется как  . Она представляет собой разность между точкой C и точкой, в которой точка B проецируется на евклидову линию 5350 посредством параллельной линии 5300. Отклонение транспортного средства от центральной линии 5030 в точке D составляет
. Она представляет собой разность между точкой C и точкой, в которой точка B проецируется на евклидову линию 5350 посредством параллельной линии 5300. Отклонение транспортного средства от центральной линии 5030 в точке D составляет  , так что изменение отклонения от точки C до точки D вычисляется как
, так что изменение отклонения от точки C до точки D вычисляется как  . Она представляет собой разность между точкой D и точкой, в которой точка C проецируется на евклидову линию 5450 посредством параллельной линии 5400. Отклонение транспортного средства от центральной линии 5030 в точке E составляет
. Она представляет собой разность между точкой D и точкой, в которой точка C проецируется на евклидову линию 5450 посредством параллельной линии 5400. Отклонение транспортного средства от центральной линии 5030 в точке E составляет  , так что изменение отклонения от точки D до точки E вычисляется как
, так что изменение отклонения от точки D до точки E вычисляется как  . Она представляет собой разность между точкой D и точкой, в которой точка E проецируется на евклидову линию 5450 посредством параллельной линии 5500. Отклонение транспортного средства от центральной линии 5030 в точке F составляет
. Она представляет собой разность между точкой D и точкой, в которой точка E проецируется на евклидову линию 5450 посредством параллельной линии 5500. Отклонение транспортного средства от центральной линии 5030 в точке F составляет  , так что изменение отклонения от точки E до точки F вычисляется как
, так что изменение отклонения от точки E до точки F вычисляется как  . Она представляет собой разность между точкой E и точкой, в которой точка F проецируется на евклидову линию 5650 посредством параллельной линии 5600.
. Она представляет собой разность между точкой E и точкой, в которой точка F проецируется на евклидову линию 5650 посредством параллельной линии 5600.
[90] После того, как отклонения формируются на этапе 3030, значения вероятностей обновляются для полосы 5000 движения на этапе 3040. В некоторых вариантах осуществления, они обновляются с использованием вероятностной функции f(x) и сформированных отклонений. С использованием значений на фиг. 5, вероятность движения в прямом направлении (т.е. правдоподобие придерживания полосы 5000 движения) может вычисляться согласно следующим общим правилам.
[91] Вероятность GS движения в прямом направлении в точке Xt, когда транспортное средство отклоняется либо к левой граничной линии 5010, либо к правой граничной линии 5020 от центральной линии 5030 полосы 500 движения, может вычисляться следующим образом:
 .
.
[92] Вероятность GS движения в прямом направлении в точке Xt, когда транспортное средство перемещается к центральной линии 5030 полосы 500 движения, может вычисляться следующим образом:
 .
.
[93] При условии, что начальное значение вероятности в точке A равно 1,0, вероятность в точке B обновляется следующим образом:



[94] Аналогично, вероятность в точке C обновляется следующим образом:



[95] Вероятность в точке D обновляется следующим образом:



[96] Эти результаты ожидаются, поскольку относительное отклонение в направлении от центральной линии 5030 непрерывно увеличивается вплоть до точки D. Другими словами, намерение ехать в прямом направлении становится меньше по мере того, как транспортное средство отъезжает от центральной линии 5030. Тем не менее, в точке E, транспортное средство отклоняется вправо, т.е. к центральной линии 5030. Соответственно, предполагается, что вероятность движения в прямом направлении должна увеличиваться. Вероятность в точке E обновляется следующим образом:



[97] Точка F представляет различную ситуацию из анализа предыдущих точек по мере того, как транспортное средство пересекает центральную линию 5030. В этой ситуации, транспортное средство сначала движется к центральной линии 5030 полосы 500 движения и затем отъезжает от центральной линии 5030 полосы 500 движения. Чтобы захватывать эту динамику, линия от точки E до точки F может разделяться на две части (одну от точки E до центральной линии 5030 и другую от центральной линии 5030 до точки F). От точки E до центральной линии 5030, вероятность увеличивается следующим образом:



[98] Значение вероятности не превышает 1,0, так что значение 1,1 ограничивается в 1,0 согласно следующей функции:

[99] От центральной линии 5030 до точки F, вероятность уменьшается следующим образом:




[100] Все значения вероятностей округляются до не более трех десятичных разрядов, но может использоваться меньшая или большая степень точности.
[101] Аналогичное обоснование может использоваться для того, чтобы обновлять значения вероятностей в различных сценариях. Например, когда транспортное средство движется по двухполосной дороге в правую сторону от центральной линии, вероятность смены полосы движения вправо, т.е. смены на правую полосу движения, вычисляется следующим образом:
 ,
,
[102] где  является вероятностью движения в прямом направлении; и вероятность смены полосы движения влево вычисляется следующим образом:
является вероятностью движения в прямом направлении; и вероятность смены полосы движения влево вычисляется следующим образом:
 .
.
[103] Когда транспортное средство движется по двухполосной дороге в левую сторону от центральной линии, вероятность смены полосы движения влево, т.е. смены на левую полосу движения, вычисляется следующим образом:
 ; и
; и
[104] вероятность смены полосы движения вправо вычисляется следующим образом:
 .
.
[105] В другом сценарии, транспортное средство находится на перекрестке. В этом случае, значения вероятностей зависят от числа вариантов полос движения, которые имеет транспортное средство. Для каждой полосы движения, вычисляется с использованием соответствующей центральной линии. Поскольку вероятность или правдоподобие придерживания каждой полосы движения вычисляется отдельно, комбинированные значения должны приводить к правдоподобию более чем в 100%. Соответственно, вероятности для каждого варианта нормализуются относительно других вариантов, например, таким образом, чтобы не превышать вероятность 1,0.
[106] Снова ссылаясь на фиг. 3, как только вероятности намерений при вождении вычисляются на этапе 3040, обработка переходит к этапу 3050, чтобы формировать траекторию удаленного транспортного средства для вплоть до N секунд. В некоторых реализациях, траектория формируется для вплоть до 4 секунд. Другие значения для N могут указываться пользователем или водителем.
[107] Фиг. 6 является схемой, иллюстрирующей формирование траектории удаленного транспортного средства во времени на основе среднего взвешенного траекторий, прогнозированных на основе кривизны карты и скорости. Фиг. 6 показывает одну полосу 6100 движения и траекторию для транспортного средства 6000, когда оно придерживается полосы 6100 движения, но вычисления должны быть аналогичными для других намерений при вождении (левый поворот, правый поворот, смена полосы движения и т.д.).
[108] Удаленное транспортное средство 6000 последний раз находилось в точке, показанной на фиг. 6, с движением в полосе 6100 движения из предыдущей полосы 6200 движения. Центральная линия 6150 полосы 6100 движения также показана на фиг. 6. Как известно, скорость транспортного средства представляет собой вектор, имеющий направление и абсолютную величину. На фиг. 6, прогнозная траектория транспортного средства 6000 на основе скорости транспортного средства показана как идущая во времени посредством стрелки 6300. Скорость транспортного средства может получаться, например, из информации кинетического состояния удаленного транспортного средства, опционально принимаемой в процессе по фиг. 3 на этапе 3000, или может вычисляться, полностью или частично, из другой информации, принимаемой на этапе 3000. При знании скорости и позиции удаленного транспортного средства 6000, может прогнозироваться траектория вплоть до K секунд.
[109] Фиг. 6 также иллюстрирует прогнозную траекторию, которая придерживается кривизны полосы 6100 движения. Эта прогнозная траектория для вплоть до K секунд, показанная посредством стрелки 6400, придерживается центральной линии 6150 полосы 6100 движения с использованием скорости транспортного средства 6000. Скорость транспортного средства может получаться, например, из информации кинетического состояния удаленного транспортного средства, опционально принимаемой в процессе по фиг. 3 на этапе 3000, или может вычисляться, полностью или частично, из другой информации, принимаемой на этапе 3000. Стрелка 6500 представляет траекторию транспортного средства 6000, которая является средним взвешенным прогнозирования траектории на основе текущей скорости, представленной посредством стрелки 6300, и прогнозирования траектории на основе кривизны карты, представленной посредством стрелки 6400.
[110] Фиг. 7 является схемой, иллюстрирующей функцию взвешивания, которая может использоваться для формирования траектории по фиг. 6. Числа и линии являются произвольными, чтобы иллюстрировать предусмотренные принципы, и не представляют значения в пределах фиг. 6. Числа представляют весовой коэффициент, присвоенные каждому прогнозированию траектории во времени. Функция взвешивания основана на таком допущении, что, во времени, транспортное средство должно перемещаться к центральной линии прогнозной полосы движения, как показано посредством стрелки 7000. Таким образом, например, прогнозирования траектории на основе скорости задаются влево на фиг. 7, и прогнозирования траектории на основе кривизны карты задаются вправо на фиг. 7. В текущей точке 7100, в которой расположено транспортное средство, максимальный весовой коэффициент (к примеру, 1,0) присваивается прогнозированию траектории на основе скорости, и минимальный весовой коэффициент (к примеру, 0) присваивается прогнозированию траектории на основе кривизны карты. По мере того, как проходит время от текущей точки 7100, взвешивание между двумя прогнозированиями изменяется таким образом, что максимальный весовой коэффициент присваивается прогнозированию траектории на основе кривизны карты, и минимальный весовой коэффициент присваивается прогнозированию траектории, например, на основе скорости в будущей точке 7200 в K секунд.
[111] Различные функции взвешивания могут использоваться для того, чтобы выполнять взвешивание. В одной реализации, взвешивание двух прогнозирований выполняется с использованием косинусоидальной функции. Например, весовой коэффициент прогнозирований на основе карты может соответствовать следующему уравнению:
 ; и
; и
[112] весовой коэффициент прогнозирований на основе скорости может соответствовать уравнению:
 .
.
[113] Переменная InterpolationTimeLength равна продолжительности, за которую весовой коэффициент прогнозирования на основе карты изменяется с 0,0 до 1,0 или весовой коэффициент прогнозирования на основе скорости изменяется с 1,0 до 0,0. Эта переменная может указываться пользователем. Переменная t равна продолжительности от текущей временной точки до вычисляемой точки интерполяции. Например, при условии, что каждая горизонтальная линия на фиг. 7 представляет одну секунду, так что переменная InterpolationTimeLength составляет 5 секунд, весовой коэффициент, применяемый к значению TM весового коэффициента траектории при прогнозировании на основе карты в точке 7300, составляет:
 ; и
; и
[114] весовой коэффициент, применяемый к значению TV траектории при прогнозирования на основе скорости в точке 7300, составляет:
 .
.
[115] Таким образом, взвешенная траектория в точке 7300 равна:
 .
.
[116] Аналогичные вычисления должны приводить к будущей траектории для удаленного транспортного средства в других временных точках.
[117] Как упомянуто выше, траектория может вычисляться для вплоть до K секунд в будущем. Намерение при вождении представляет собой ввод в этот процесс, как видно на фиг. 8. Более конкретно, по мере того, как удаленное транспортное средство проезжает по транспортной сети для транспортных средств, оно приближается к изменениям информации транспортной сети для транспортных средств (например, к сменам полосы движения), которые должны учитываться при формировании траектории удаленного транспортного средства. На фиг. 8, например, удаленное транспортное средство находится в текущей точке 8000 в одной полосе 8050 движения, в которой текущее намерение при вождении может представлять собой только движение в прямом направлении. Пример траектории для удаленного транспортного средства помечается 8100. Тем не менее, после достижения точки 8200, намерение при вождении может представлять собой движение в прямом направлении или правый поворот вследствие присутствия полос 8300 и 8400 движения. При условии, что траектория 8100 для текущего намерения движения в прямом направлении только отнимает 2 секунды вычисления 4-секундной траектории, положение транспортного средства (т.е. его позиция в информации транспортной сети для транспортных средств) и скорость повторно вычисляются в точке 8200 таким образом, чтобы формировать следующий сегмент траектории, к примеру, траекторию 8500 для следующего намерения при вождении правого поворота, еще для 2 секунд. Траектория формируется, как описано выше относительно фиг. 6 и 7, и она формируется для каждого намерения при вождении (например, полосы движения).
[118] Снова ссылаясь на фиг. 3, как только траектория удаленного транспортного средства формируется, она может использоваться для того, чтобы помогать рассматриваемому транспортному средству при проезде по транспортной сети для транспортных средств. Например, и со ссылкой на фиг. 9, рассматриваемое транспортное средство 9000 и удаленное транспортное средство 9100 движутся в участке транспортной сети для транспортных средств, здесь на перекрестке 9300. Информация транспортной сети для транспортных средств включает в себя полосы движения 1-8 и четыре знака остановки, представленные посредством линий 9400. Рассматриваемое транспортное средство 9000 расположено в полосе 2 движения и должно продолжать движение в полосу движения 5, как показано посредством стрелки, идущей из рассматриваемого транспортного средства 9000. Удаленное транспортное средство 9100 находится в полосе 8 движения и может ехать в прямом направлении или поворачивать налево или поворачивать направо, как показано посредством стрелок, идущих из удаленного транспортного средства 9100. Удаленное транспортное средство 9100 прибывает к знаку остановки полосы 8 движения до того, как рассматриваемое транспортное средство 9000 прибывает к знаку остановки полосы 2 движения. В описанной реализации, смена полосы движения на перекрестке 9300 не включена в качестве возможного намерения при вождении.
[119] Рассматриваемое транспортное средство 9000 может принимать решение относительно проезда по перекрестку 9300, например, на основе траектории удаленного транспортного средства для полосы движения и правдоподобия того, что удаленное транспортное средство 9100 должно придерживаться одного намерения при вождении или другого (т.е. ехать в прямом направлении или левый поворот, или правый поворот). Например, рассматриваемое транспортное средство 9000 может решать ожидать у знака остановки в полосе 2 движения, чтобы позволять удаленному транспортному средству 9100 проезжать перекресток 9300, если более вероятно то, что удаленное транспортное средство 9100 должно продолжать движение в полосу 3 движения, за счет этого блокируя путь рассматриваемого транспортного средства 9000 (например, намерение при вождении, чтобы ехать в прямом направлении, имеет более высокое правдоподобие или вероятность, чем намерение при вождении, чтобы поворачивать налево и поворачивать направо). Напротив, рассматриваемое транспортное средство 9000 может решать сделать краткую остановку и продолжать ехать в прямом направлении, если более вероятно то, что удаленное транспортное средство 9100 должно поворачивать направо в полосу 1 движения, поскольку удаленное транспортное средство 9100 не должно блокировать рассматриваемое транспортное средство 9000.
[120] Это представляет собой только один пример, и рассматриваемое транспортное средство 9000 может использовать намерения при вождении и проецируемые траектории любым числом способов. Например, когда оба транспортных средства движутся в идентичной полосе движения на прямой дороге, рассматриваемое транспортное средство 9000 может использовать проецируемую траекторию, чтобы определять то, если и когда оно должно достигать удаленного транспортного средства 9100, чтобы обгонять его. В другом примере, удаленное транспортное средство 9100 может двигаться в полосе движения слева от рассматриваемого транспортного средства 9000 на прямой дороге. Рассматриваемое транспортное средство 9000 затем может использовать проецируемую траекторию, чтобы определять то, если и когда оно должно тормозить, если удаленное транспортное средство 9100 показывает намерение смены на полосу движения, в которой движется рассматриваемое транспортное средство 9000. Рассматриваемое транспортное средство 9000 также может косвенно использовать информацию, сформированную для удаленного транспортного средства 9100 посредством, например, устройства сетевой инфраструктуры, такого как контроллер трафика на перекрестке, принимающего или формирующего информацию касательно (например, удаленного и рассматриваемого) транспортного средства и направляющего поток на перекрестке через светофор или иным образом использующего траектории и правдоподобия.
[121] Проезд по транспортной сети для транспортных средств может заключать в себе такие действия, как выдача предупреждений водителю рассматриваемого транспортного средства или осуществление корректирующих действий, таких как выдача инструкций торможения в тормозную систему рассматриваемого транспортного средства. Другие корректирующие действия могут осуществляться в то время, когда рассматриваемое транспортное средство проезжает по транспортной сети для транспортных средств на этапе 3060.
[122] Способ, как описано на примере на фиг. 3, может повторяться периодически или по требованию в то время, когда рассматриваемое транспортное средство движется вдоль транспортной сети для транспортных средств. Он также может повторяться полностью или частично при приближении к изменениям конфигурации полосы движения в информации транспортной сети для транспортных средств.
[123] Хотя раскрытие сущности описывает одно удаленное транспортное средство в качестве отслеживаемого объекта, также могут отслеживаться другие транспортные средства с электромотором, которые сохраняют позиции в заданной полосе движения. Дополнительно, более чем одно удаленное транспортное средство может отслеживаться во времени. Вышеуказанное включает в себя самое большее три полосы движения, отходящие от идентичной предшествующей полосы движения на перекрестке: полосу движения в прямом направлении, полосу движения на левый поворот и полосу движения на правый поворот. Дополнительная сложность вводится в вычисления, когда вводятся дополнительные полосы движения, или когда могут возникать смены полосы движения на перекрестке.
[124] Вышеприведенные аспекты, примеры и реализации описываются для того, чтобы обеспечивать возможность простого понимания раскрытия сущности, и не являются ограничивающими. Напротив, раскрытие сущности охватывает различные модификации и эквивалентные компоновки, включенные в пределы объема прилагаемой формулы изобретения, причем этот объем должен согласовываться с самой широкой интерпретацией так, что он заключает все такие модификации и эквивалентные структуры, разрешенные в соответствии с законом.
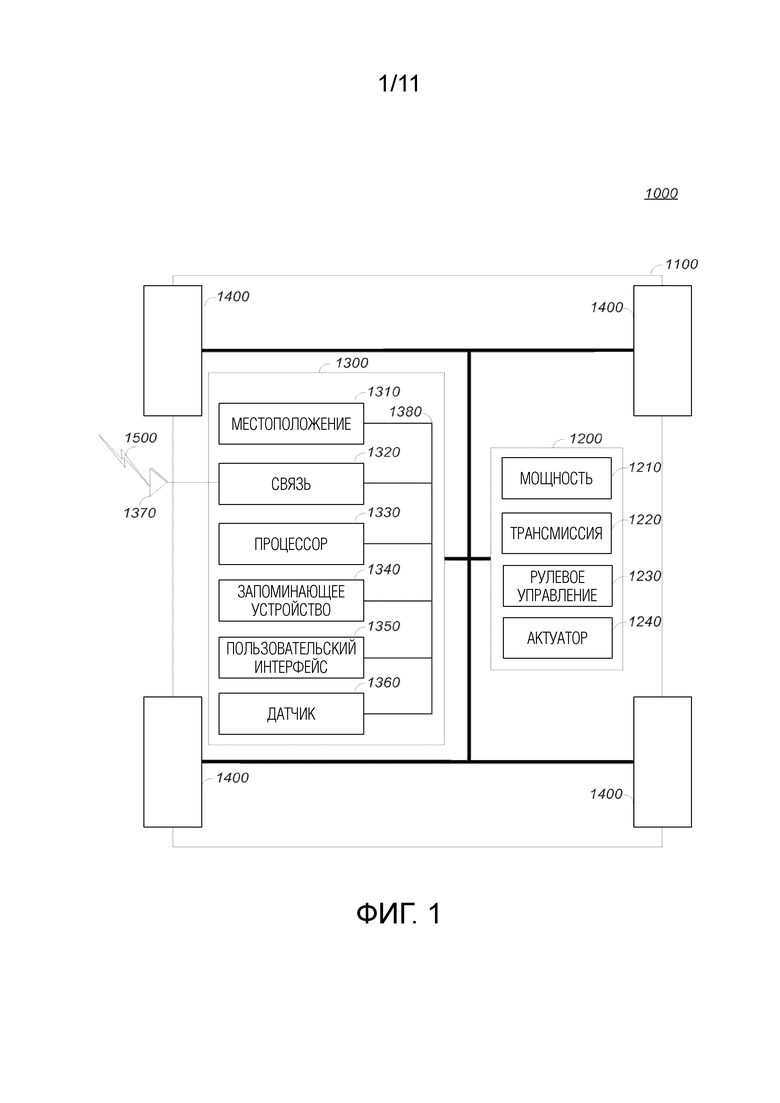
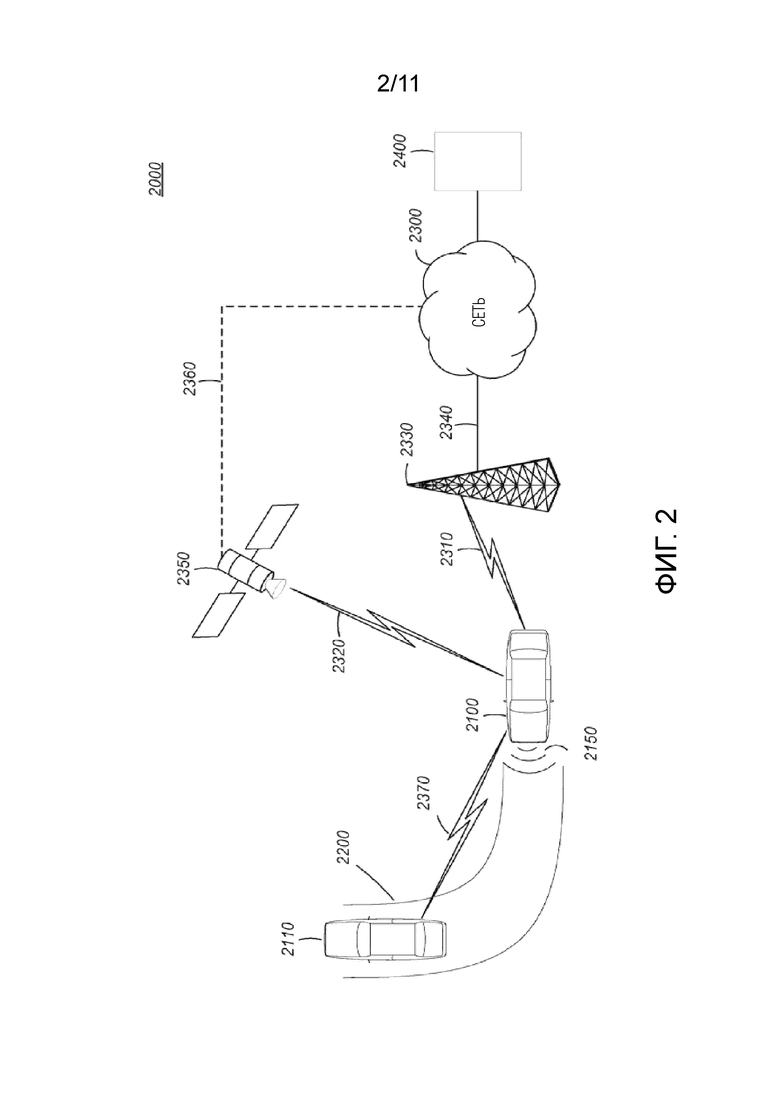
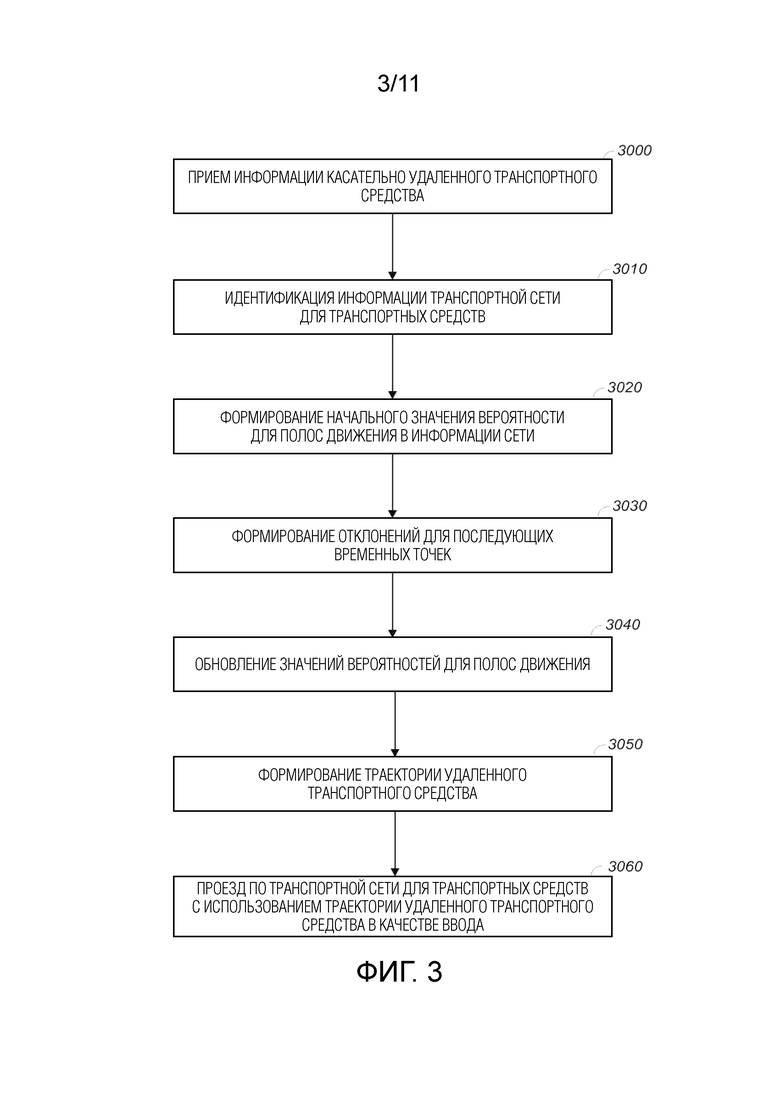
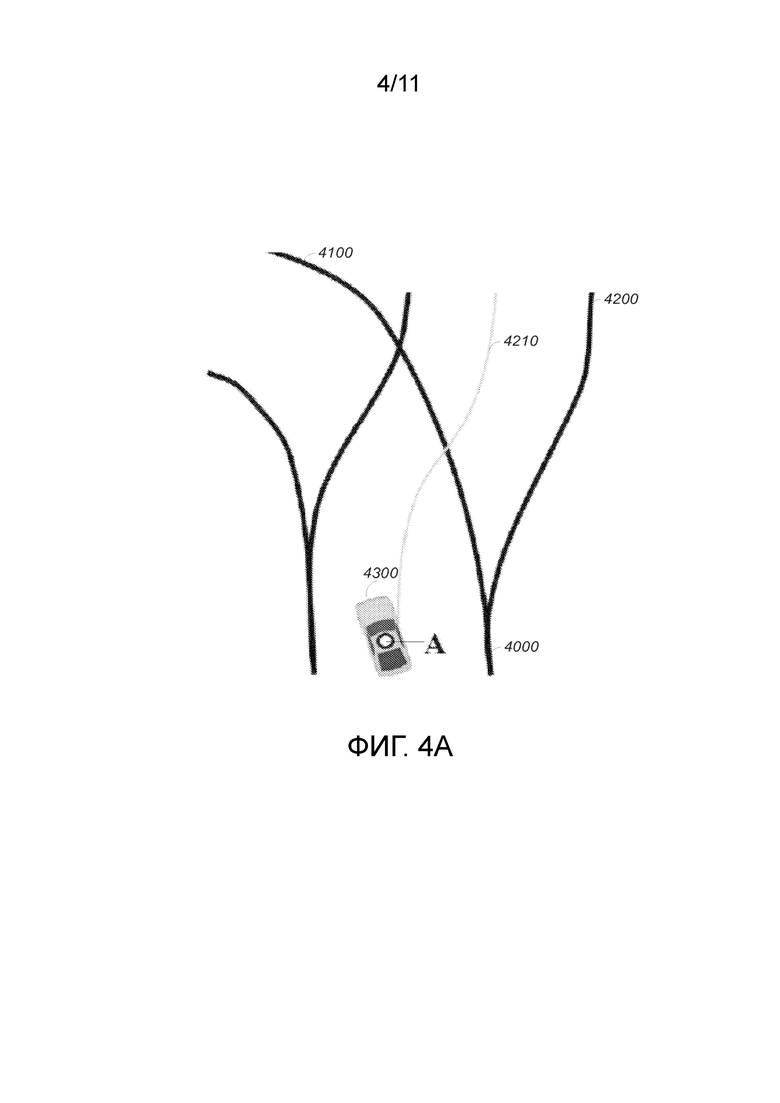
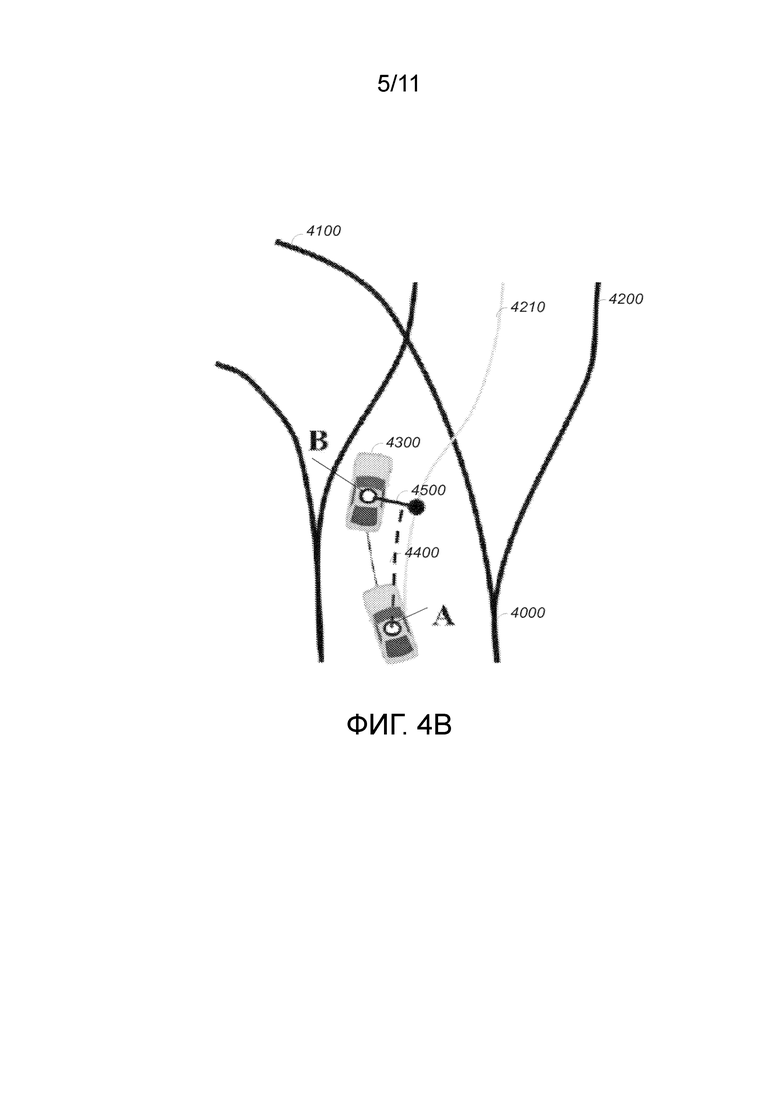
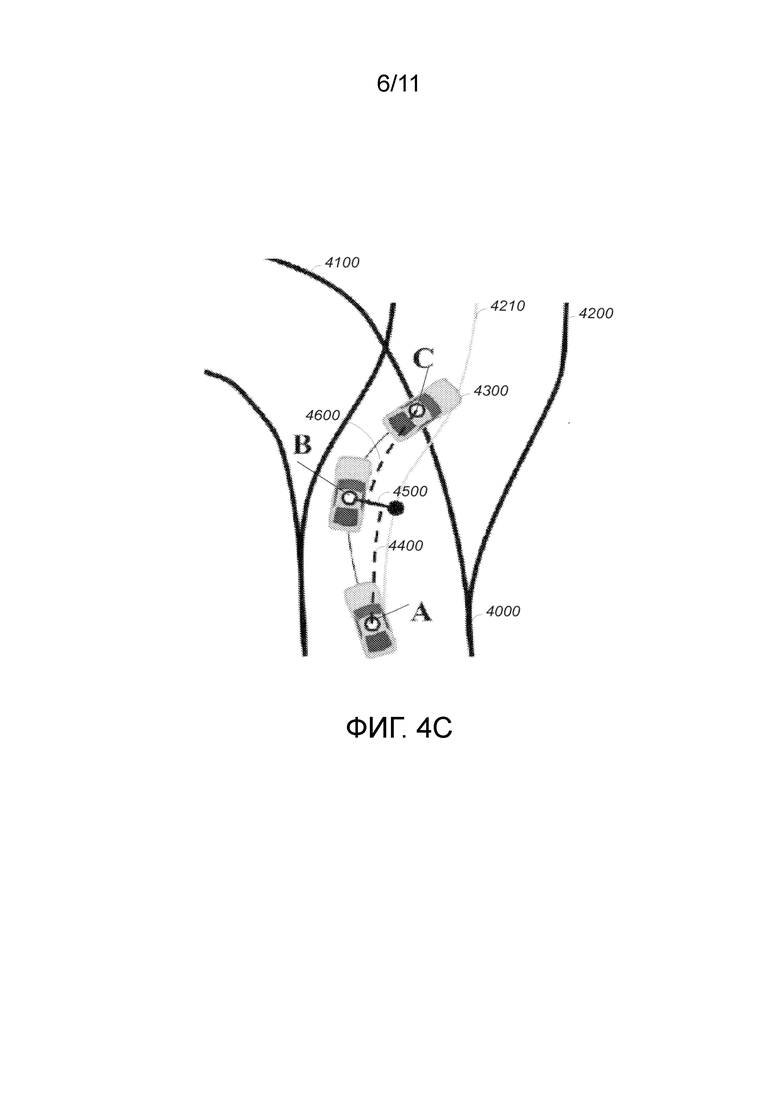
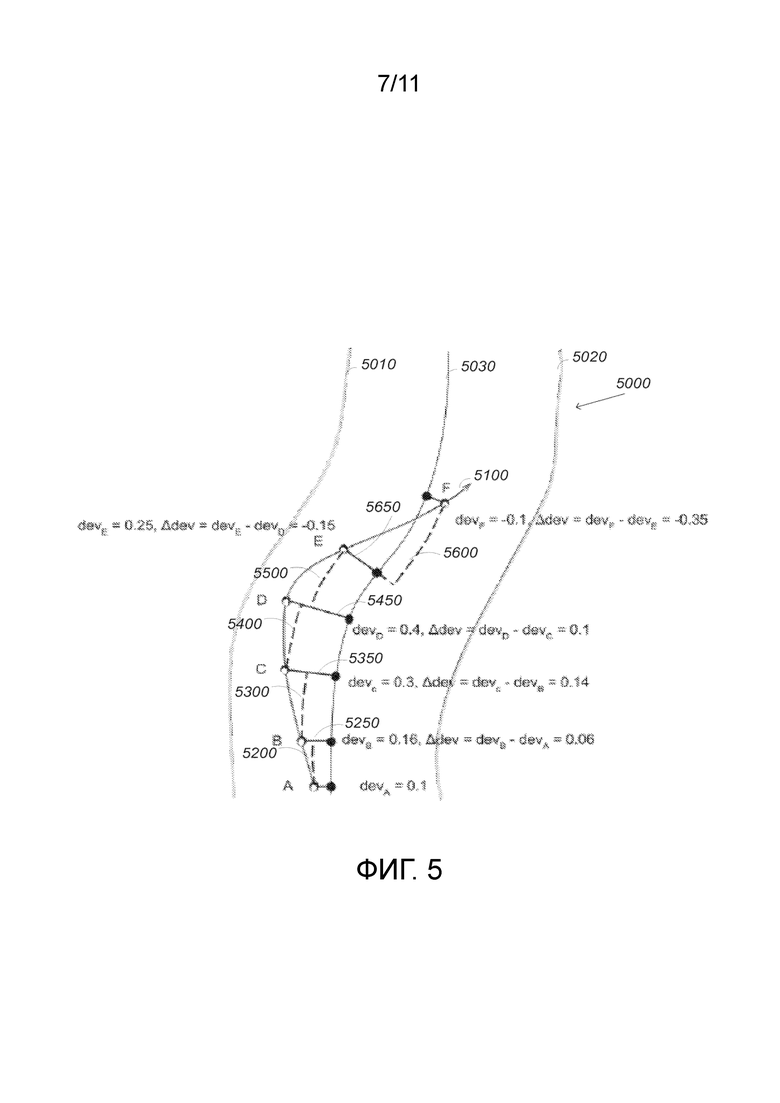
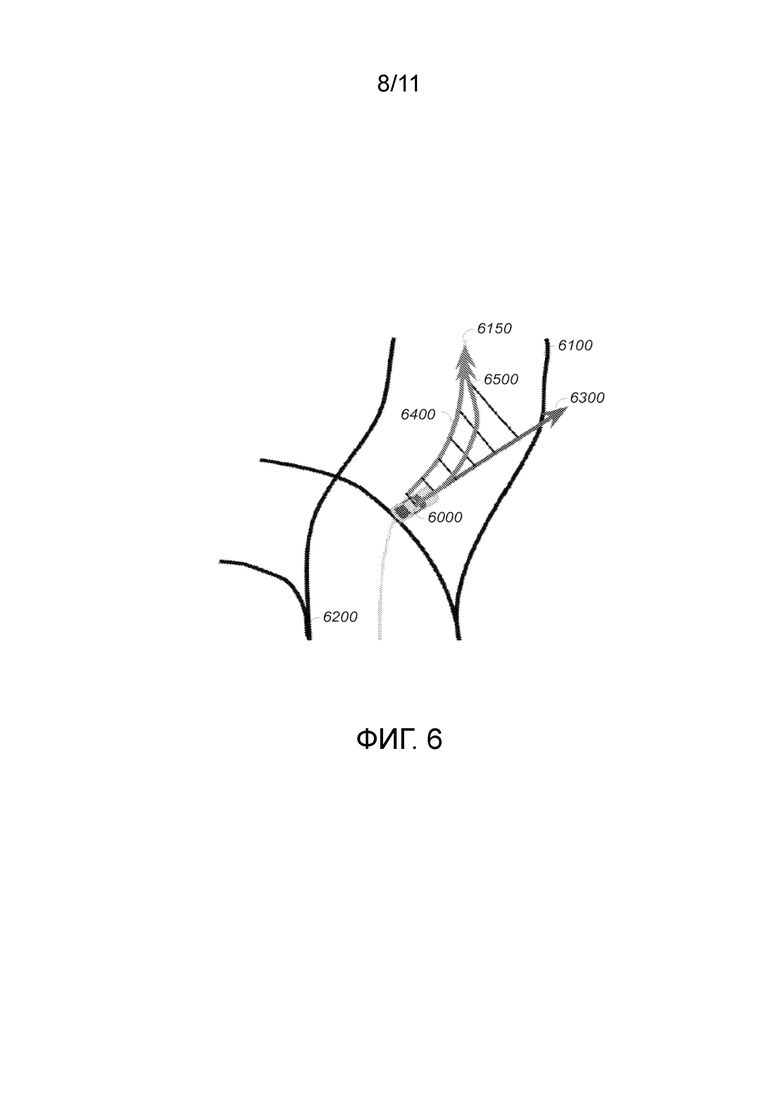
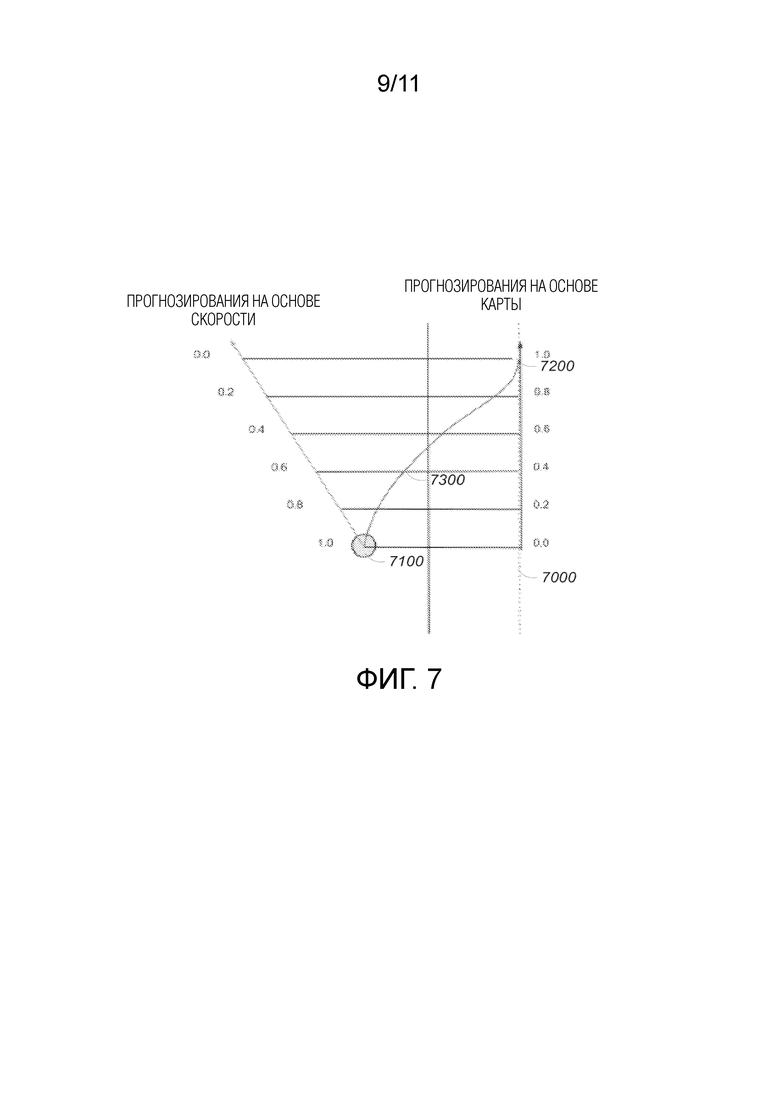
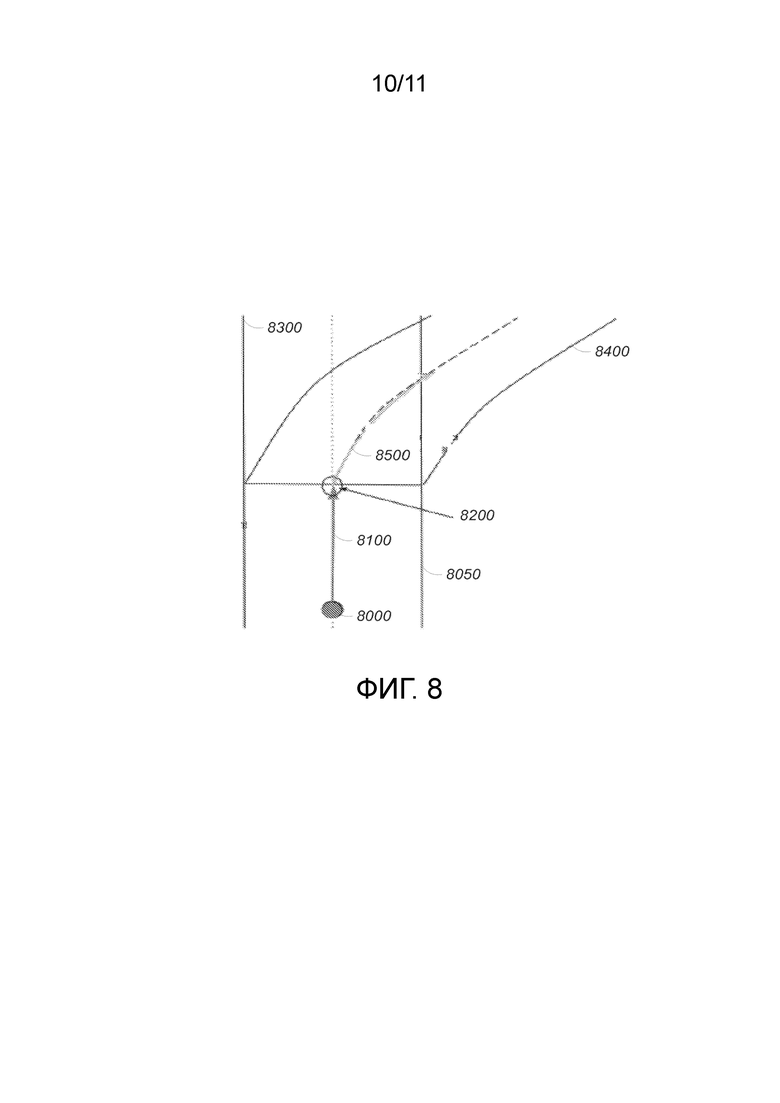
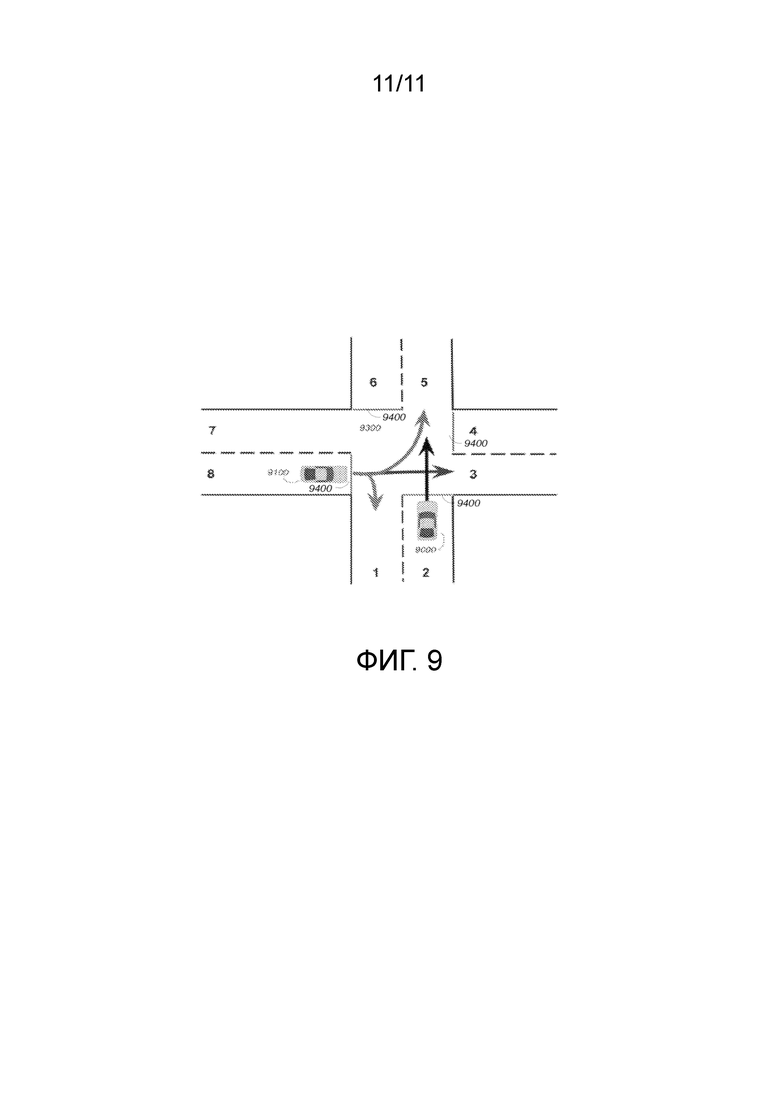
Изобретение относится к способу работы транспортного средства. Способ формирования проецируемой информации касательно транспортного средства содержит этапы, на которых принимают информацию пространственного состояния удаленных транспортных средств, идентифицируют информацию транспортной сети для транспортных средств на основе информации пространственного состояния удаленных транспортных средств, формируют значение вероятности на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети. Причем каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения. Способ также формирует отклонение удаленного транспортного средства между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств, обновляет правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, с использованием нового значения вероятности на основе отклонения формируют траекторию с использованием правдоподобия в качестве обновленного. Достигается своевременное прогнозирование намерений удаленных транспортных средств. 2 н. и 18 з.п. ф-лы, 11 ил.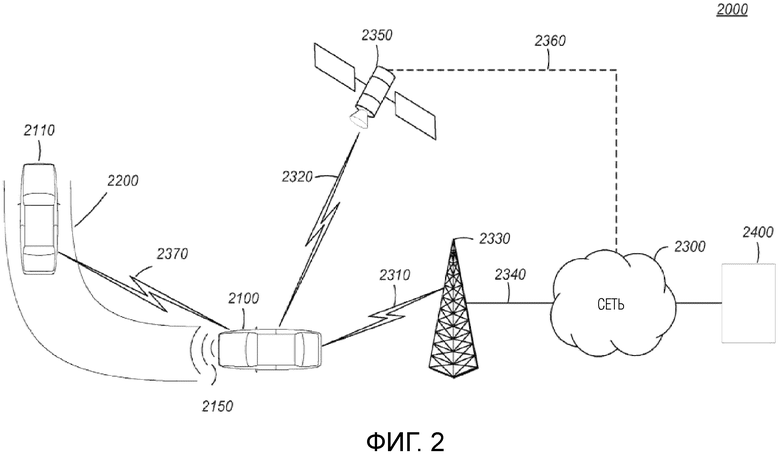
1. Способ формирования проецируемой информации касательно транспортного средства для использования при проезде по транспортной сети для транспортных средств, при этом способ содержит этапы, на которых:
- принимают, в рассматриваемом транспортном средстве, информацию пространственного состояния удаленных транспортных средств для удаленного транспортного средства;
- идентифицируют информацию транспортной сети для транспортных средств, представляющую участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств;
- формируют, посредством процессора в ответ на инструкции, сохраненные на некратковременном компьютерно-читаемом носителе, по меньшей мере, одно начальное значение вероятности на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств в начальной временной точке, причем каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, в информации транспортной сети для транспортных средств;
- формируют, для множества временных точек, включающих в себя начальную временную точку, отклонение удаленного транспортного средства между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств;
- обновляют, для каждой одной полосы движения и для каждого отклонения, правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, с использованием нового значения вероятности на основе отклонения;
- формируют, для удаленного транспортного средства, траекторию с использованием правдоподобия в качестве обновленного; и
- проезжают, посредством рассматриваемого транспортного средства, по транспортной сети для транспортных средств с использованием информации транспортной сети для транспортных средств и траектории для удаленного транспортного средства.
2. Способ по п. 1, в котором идентификация информации транспортной сети для транспортных средств, представляющей участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств, содержит этап, на котором:
- идентифицируют, по меньшей мере, одну полосу, по которой может проезжать удаленное транспортное средство, посредством сравнения информации пространственного состояния удаленных транспортных средств с транспортной сетью для транспортных средств.
3. Способ по п. 2, дополнительно содержащий этап, на котором:
- принимают, в рассматриваемом транспортном средстве, информацию кинематического состояния удаленного транспортного средства для удаленного транспортного средства в течение периода времени, и при этом:
формирование траектории с использованием правдоподобия в качестве обновленного содержит этап, на котором формируют траекторию с использованием информации кинематического состояния удаленного транспортного средства.
4. Способ по п. 3, в котором информация пространственного состояния удаленных транспортных средств включает в себя пространственные координаты для удаленного транспортного средства, и информация кинематического состояния удаленного транспортного средства включает в себя, по меньшей мере, одно из скорости удаленного транспортного средства для удаленного транспортного средства или ускорения удаленного транспортного средства для удаленного транспортного средства.
5. Способ по п. 1, дополнительно содержащий этап, на котором:
- принимают, в рассматриваемом транспортном средстве, информацию кинематического состояния удаленного транспортного средства для удаленного транспортного средства в течение периода времени, и при этом:
формирование траектории с использованием правдоподобия в качестве обновленного содержит этап, на котором:
- формируют, для каждой конкретной полосы движения, соответствующую траекторию, чтобы формировать множество траекторий, проецируемых из текущей позиции удаленного транспортного средства с использованием информации кинематического состояния удаленного транспортного средства, причем множество проецируемых траекторий идут в идентичную будущую точку времени.
6. Способ по п. 1, в котором формирование, по меньшей мере, одного начального значения вероятности содержит этап, на котором:
- сравнивают информацию пространственного состояния удаленных транспортных средств и информацию транспортной сети для транспортных средств, чтобы задавать текущее число полос движения, доступных для удаленного транспортного средства в информации транспортной сети для транспортных средств в начальной временной точке, и при этом:
- каждое начальное значение вероятности является идентичным значением, заданным посредством текущего числа полос движения.
7. Способ по п. 1, в котором формирование траектории с использованием правдоподобия в качестве обновленного содержит этапы, на которых:
- формируют набор первых значений траектории с использованием текущей скорости и курса удаленного транспортного средства;
- формируют набор вторых значений траектории с использованием правдоподобия в качестве обновленного; и
- формируют траекторию посредством комбинирования набора первых значений траектории и набора вторых значений траектории.
8. Способ по п. 7, в котором комбинирование набора первых значений траектории и набора вторых значений траектории содержит этап, на котором:
- применяют косинусоидальную функцию, чтобы взвешивать каждое первое значение траектории из набора первых значений траектории и соответствующее второе значение траектории из набора вторых значений траектории в конце каждого из множества временных интервалов для времени интерполяции.
9. Способ по п. 1, в котором упомянутая одна полоса движения представляет собой одну из множества полос движения, причем способ, для каждой полосы движения из множества полос движения, дополнительно содержит этапы, на которых:
- задают центральную линию для полосы движения; и
для каждой текущей временной точки из множества временных точек:
- принимают текущее значение для информации пространственного состояния удаленных транспортных средств, причем текущее значение ассоциировано с текущей позицией удаленного транспортного средства в текущей временной точке, и выполняют одно из следующего:
- проецируют центральную линию удаленного транспортного средства параллельно с центральной линией для полосы движения из предыдущего значения для информации пространственного состояния удаленных транспортных средств на евклидову линию, идущую между текущим значением для информации пространственного состояния удаленных транспортных средств и центральной линией для полосы движения; и
- формируют отклонение в качестве относительного отклонения удаленного транспортного средства от центральной линии для полосы движения на основе евклидова расстояния между текущим значением для удаленного транспортного средства и центральной линией удаленного транспортного средства на евклидовой линии; или
- проецируют центральную линию для полосы движения удаленного транспортного средства параллельно с центральной линией для полосы движения из евклидовой линии, идущей между предыдущим значением для информации пространственного состояния удаленных транспортных средств и центральной линией для полосы движения, на текущее значение для информации пространственного состояния удаленных транспортных средств; и
- формируют отклонение в качестве относительного отклонения удаленного транспортного средства от центральной линии для полосы движения на основе евклидова расстояния между предыдущим значением для удаленного транспортного средства и центральной линией удаленного транспортного средства на евклидовой линии;
- при этом новое значение вероятности основано на относительном отклонении.
10. Способ по п. 9, в котором обновление начального значения вероятности с использованием нового значения вероятности на основе относительного отклонения дополнительно содержит этап, на котором:
- связывают относительное отклонение с новым значением вероятности с использованием кумулятивной функции распределения в виде гауссова распределения.
11. Способ по п. 1, дополнительно содержащий этапы, на которых:
- задают отклонение в качестве положительного значения, когда относительное отклонение между смежными значениями для информации пространственного состояния удаленных транспортных средств демонстрирует то, что удаленное транспортное средство перемещается в первом направлении относительно центральной линии упомянутой одной полосы движения; и
- задают отклонение в качестве отрицательного значения, когда относительное отклонение между смежными значениями для информации пространственного состояния удаленных транспортных средств демонстрирует то, что удаленное транспортное средство перемещается во втором направлении относительно центральной линии упомянутой одной полосы движения, причем второе направление является противоположным первому направлению, при этом:
- новое значение вероятности является функцией отклонения.
12. Способ по п. 11, в котором обновление, для каждой одной полосы движения и для каждого отклонения, правдоподобия с использованием нового значения вероятности содержит этапы, на которых:
- формируют текущее значение вероятности для текущей временной точки из множества временных точек посредством деления предыдущего значения вероятности для предыдущей временной точки во множестве временных точек на новое значение вероятности, когда удаленное транспортное средство находится ближе к центральной линии в текущей временной точке, чем в предыдущей временной точке, но не пересекает центральную линию между предыдущей временной точкой и текущей временной точкой;
- формируют текущее значение вероятности для текущей временной точки из множества временных точек посредством умножения предыдущего значения вероятности для предыдущей временной точки во множестве временных точек на новое значение вероятности, когда удаленное транспортное средство находится еще дальше от центральной линии в текущей временной точке, чем в предыдущей временной точке, но не пересекает центральную линию между предыдущей временной точкой и текущей временной точкой; и
- когда удаленное транспортное средство пересекает центральную линию между предыдущей временной точкой и текущей временной точкой, формируют текущее значение вероятности для текущей временной точки из множества временных точек посредством следующего:
- делят, чтобы формировать результат деления, предыдущее значение вероятности для предыдущей временной точки во множестве временных точек на первое значение вероятности на основе участка отклонения, обусловленного удаленным транспортным средством, движущимся из начальной позиции в предыдущей временной точке к центральной линии; и
- умножают, чтобы формировать текущее значение вероятности, результат деления на второе значение вероятности на основе участка отклонения, обусловленного удаленным транспортным средством, движущимся от центральной линии в текущую позицию в текущей временной точке.
13. Устройство для формирования проецируемой информации касательно транспортного средства для использования при проезде по транспортной сети для транспортных средств, причем устройство содержит:
- некратковременное запоминающее устройство; и
- процессор, выполненный с возможностью выполнять инструкции, сохраненные в некратковременном запоминающем устройстве, с возможностью:
- принимать информацию пространственного состояния удаленных транспортных средств для удаленного транспортного средства;
- идентифицировать информацию транспортной сети для транспортных средств, представляющую участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств;
- формировать, по меньшей мере, одно начальное значение вероятности на основе сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств в начальной временной точке, причем каждое начальное значение вероятности указывает правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, в информации транспортной сети для транспортных средств;
- формировать, для множества временных точек, включающих в себя начальную временную точку, отклонение удаленного транспортного средства между смежными значениями для информации пространственного состояния удаленных транспортных средств относительно информации транспортной сети для транспортных средств;
- обновлять, для каждой одной полосы движения и для каждого отклонения, правдоподобие того, что удаленное транспортное средство придерживается одной полосы движения, с использованием нового значения вероятности на основе отклонения;
- формировать, для удаленного транспортного средства, траекторию с использованием правдоподобия в качестве обновленного; и
- проезжать, с использованием рассматриваемого транспортного средства, по транспортной сети для транспортных средств с использованием информации транспортной сети для транспортных средств и траектории для удаленного транспортного средства.
14. Устройство по п. 13, в котором процессор выполнен с возможностью идентифицировать информацию транспортной сети для транспортных средств, представляющую участок транспортной сети для транспортных средств, на основе информации пространственного состояния удаленных транспортных средств посредством:
- идентификации множества полос движения, причем каждая из множества полос движения представляет собой одно из:
- текущей полосы движения, по которой удаленное транспортное средство движется в начальной временной точке;
- смежной полосы движения, смежной с текущей полосой движения;
- предыдущей полосы движения, имеющей место перед текущей полосой движения; или
- будущей полосы движения, имеющей место после текущей полосы движения.
15. Устройство по п. 13, в котором процессор выполнен с возможностью:
- принимать информацию кинематического состояния удаленного транспортного средства для удаленного транспортного средства в течение периода времени; и
- формировать траекторию с использованием правдоподобия в качестве обновленного посредством формирования траектории с использованием информации кинематического состояния удаленного транспортного средства.
16. Устройство по п. 15, в котором процессор выполнен с возможностью принимать информацию кинематического состояния удаленного транспортного средства в беспроводном сигнале, передаваемом из удаленного транспортного средства.
17. Устройство по п. 15, в котором процессор выполнен с возможностью принимать информацию кинематического состояния удаленного транспортного средства с использованием, по меньшей мере, одного датчика рассматриваемого транспортного средства.
18. Устройство по п. 13, в котором процессор выполнен с возможностью формировать, по меньшей мере, одно начальное значение вероятности посредством:
- сравнения информации пространственного состояния удаленных транспортных средств и информации транспортной сети для транспортных средств, чтобы задавать текущее число полос движения, доступных для удаленного транспортного средства в информации транспортной сети для транспортных средств в начальной временной точке, при этом:
- каждое начальное значение вероятности равно единице, деленной на текущее число полос движения, и при этом:
- текущее число полос движения превышает единицу.
19. Устройство по п. 18, в котором процессор выполнен с возможностью формировать соответствующие значения для отклонения для каждой полосы движения и выполнен с возможностью обновлять правдоподобие с использованием нового значения вероятности, для каждой полосы движения, посредством:
- формирования текущего значения вероятности для текущей временной точки из множества временных точек посредством деления предыдущего значения вероятности для предыдущей временной точки во множестве временных точек на новое значение вероятности, когда удаленное транспортное средство находится ближе к центральной линии полосы движения в текущей временной точке, чем в предыдущей временной точке, но не пересекает центральную линию между предыдущей временной точкой и текущей временной точкой;
- формирования текущего значения вероятности для текущей временной точки из множества временных точек посредством умножения предыдущего значения вероятности для предыдущей временной точки во множестве временных точек на новое значение вероятности, когда удаленное транспортное средство находится еще дальше от центральной линии в текущей временной точке, чем в предыдущей временной точке, но не пересекает центральную линию между предыдущей временной точкой и текущей временной точкой; и
- когда удаленное транспортное средство пересекает центральную линию между предыдущей временной точкой и текущей временной точкой, формирования текущего значения вероятности для текущей временной точки из множества временных точек посредством:
- деления, чтобы формировать результат деления, предыдущего значения вероятности для предыдущей временной точки во множестве временных точек на первое значение вероятности на основе участка отклонения, обусловленного удаленным транспортным средством, движущимся из начальной позиции в предыдущей временной точке к центральной линии; и
- умножения, чтобы формировать текущее значение вероятности, результата деления на второе значение вероятности на основе участка отклонения, обусловленного удаленным транспортным средством, движущимся от центральной линии в текущую позицию в текущей временной точке.
20. Устройство по п. 19, в котором процессор выполнен с возможностью нормализовать текущие значения вероятностей в каждой из множества временных точек на основе текущего числа полос движения до формирования траектории для каждой полосы движения.
| US 8903588 B2, 02.12.2014 | |||
| US 9165477 B2, 20.10.2015 | |||
| US 8452535 B2, 28.05.2013. |

