[Область техники]
[0001]
Настоящее изобретение относится к способу управления движением и к устройству управления движением для транспортного средства, которые включают в себя автономное управление движением.
Настоящая заявка испрашивает приоритет на основании заявки на патент Японии № 2019-92431 поданной 15 мая 2019 г. Для тех указанных стран, которые разрешают включение посредством ссылки, содержание, описанное и/или проиллюстрированное в вышеуказанной заявке, включено посредством ссылки в настоящую заявку как часть описания и/или чертежей настоящей заявки.
[Уровень техники]
[0002]
Известно устройство помощи при вождении для транспортного средства, которое сконфигурировано для установки целевого угла поворота рулевого колеса для управления рассматриваемым транспортным средством для движения по полосе движения (Патентный документ 1). В этом устройстве, когда определяется, что блок камеры не может распознать правую и левую линии отсека маршрута движения рассматриваемого транспортного средства, считывается кривизна согласно карте, сохраненная для полосы движения на дорожной карте рассматриваемого транспортного средства, и оценочное отклонение местоположения вбок получается на основе кривизны карты, предшествующей кривизны и скорости транспортного средства рассматриваемого транспортного средства. Предыдущая кривизна основана на траектории движения объекта слежения, предшествующего транспортному средству. Расчетное отклонение поперечного местоположения добавляется к поперечному местоположению рассматриваемого транспортного средства, чтобы установить указанный выше целевой угол поворота рулевого колеса.
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP201919-38396A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако согласно вышеупомянутому уровню техники, кривизна карты считывается из картографической базы данных дорог после определения того, что камера не может распознать правую и левую линии отсека, и, следовательно, переключение с управления транспортным средством с использованием результата распознавания камеры для управления транспортным средством с использованием данных картографической базы данных дорог задерживается. Таким образом, существует проблема в том, что диапазон поведения транспортного средства становится большим.
[0005]
Задача, которая должна быть решена настоящим изобретением, состоит в том, чтобы предоставить способ управления движением и устройство управления движением для транспортного средства, которые способны подавлять поведение транспортного средства при переключении автономного управления транспортным средством.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает указанную выше проблему, когда на маршруте движения транспортного средства присутствует нераспознаваемая область, переключаясь с автономного управления транспортным средством с использованием информации, распознанной из изображения камеры, на автономное управление транспортным средством с использованием картографической информации на носителе данных. прежде, чем транспортное средство войдет в нераспознаваемую зону.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению поведение транспортного средства может подавляться при переключении автономного управления транспортным средством.
[Краткое описание чертежей]
[0008]
ФИГ. 1 представляет собой блок-схему, иллюстрирующую вариант осуществления устройства управления движением для транспортного средства согласно настоящему изобретению.
ФИГ. 2 - вид спереди, иллюстрирующий часть устройства ввода по фиг. 1.
ФИГ. 3 - блок-схема картографической базы данных и устройства управления по фиг. 1.
ФИГ. 4A - схема для описания траекторий движения и целевых точек при движении с главной дороги на полосу ответвления дороги с ответвлением.
ФИГ. 4B - схематическая диаграмма, иллюстрирующая часть траекторий движения и целевых точек фиг. 4А.
ФИГ. 5 - блок-схема, иллюстрирующая переход между состояниями устройства управления по фиг. 1.
ФИГ. 6A - блок-схема (часть 1), иллюстрирующая процесс управления движением устройства управления движением для транспортного средства согласно настоящему изобретению.
ФИГ. 6B - блок-схема (часть 2), иллюстрирующая процесс управления движением устройства управления движением для транспортного средства согласно настоящему изобретению.
ФИГ. 6С - блок-схема (часть 3), иллюстрирующая процесс управления движением устройства управления движением для транспортного средства согласно настоящему изобретению.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
ФИГ. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 1 управления движением для транспортного средства согласно варианту осуществления настоящего изобретения. Устройство 1 управления движением для транспортного средства согласно настоящему варианту осуществления представляет вариант осуществления для выполнения способа управления движением для транспортного средства согласно настоящему изобретению. Как показано на фиг. 1, устройство 1 управления движением для транспортного средства согласно настоящему варианту осуществления включает в себя датчики 11, устройство 12 определения местоположения рассматриваемого транспортного средства, картографическую базу данных 13, бортовое оборудование 14, устройство 15 представления, устройство 16 ввода, устройство 17 управления вождением и устройство 18 управления. Эти устройства соединены друг с другом, например, через локальную сеть контроллеров (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0010]
Датчики 11 обнаруживают состояние движения рассматриваемого транспортного средства. Примеры датчиков 11 включают, например, переднюю камеру, которая фиксирует изображения впереди рассматриваемого транспортного средства, заднюю камеру, которая фиксирует изображения позади рассматриваемого транспортного средства, передний радар, который обнаруживает препятствия впереди объекта съемки, задний радар, который обнаруживает препятствия позади рассматриваемого транспортного средства, боковые радары, которые обнаруживают препятствия, существующие с правой и левой стороны рассматриваемого транспортного средства, датчик скорости транспортного средства, который определяет скорость рассматриваемого транспортного средства, сенсорный датчик (датчик емкости), который определяет, держит ли водитель руль, бортовую камеру, фиксирующую изображения водителя и т.д. Датчики 11 могут быть представлены одним из вышеописанных различных датчиков или также могут быть сконфигурированы как комбинация двух или более датчиков. Результаты обнаружения датчиков 11 выводятся в устройство 18 управления с предварительно определенными временными интервалами.
[0011]
Устройство 12 определения местоположения рассматриваемого транспортного средства состоит из блока GPS, гироскопа, датчика скорости транспортного средства и т.д. Устройство 12 определения местоположения рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи, используя блок GPS, чтобы периодически получать информацию о местоположении целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущее местоположение целевого транспортного средства на основе полученной информации о местоположении целевого транспортного средства, информацию об изменении угла, полученную от гироскопического датчика, и скорость транспортного средства, полученную от датчика скорости транспортного средства. Информация о местоположении целевого транспортного средства, определяемая устройством 12 определения местоположения рассматриваемого транспортного средства, выводится в устройство 18 управления с предварительно определенными временными интервалами.
[0012]
Картографическая база данных 13 представляет собой память, которая хранит трехмерную высокоточную картографическую информацию, включая информацию о местоположении различных объектов и конкретных точек, и доступна с устройства 18 управления. Трехмерная высокоточная картографическая информация, хранящаяся в картографической базе данных 13, представляет собой трехмерную высокоточную картографическую информацию, основанную на форме дороги, обнаруженную при движении по реальной дороге с использованием транспортного средства для сбора данных, и, в трехмерной высокоточной картографической информации, подробные и высокоточные элементы информации о местоположении, такие как изогнутый маршрут и размер изогнутости (например, кривизна или радиус кривизны), точка слияния и точка ответвления дороги, пункт оплаты проезда, местоположение, в котором количество полос уменьшается, и зона обслуживания/зона парковки ассоциируются с картографической информацией как с трехмерной информацией.
[0013]
Бортовое оборудование 14 включает в себя различные модули, установленные в транспортном средстве, и управляется водителем. Примеры такого бортового оборудования включают в себя рулевое колесо, педаль акселератора, педаль тормоза, навигационное устройство, указатели поворота, дворники, фонари, звуковой сигнал и другие специальные переключатели. Когда водитель управляет бортовым оборудованием 14, информация о его работе выводится на устройство 18 управления.
[0014]
Устройство 15 представления представлено, например, такими устройствами, как дисплей навигационного устройства, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в измерительный блок, проекционный дисплей, проецируемый на лобовое стекло, динамик аудиоустройства и сиденье со встроенными вибрирующими телами. Устройство 15 представления информирует водителя информацией представления и информацией о смене полосы движения, что будет описано ниже, под управлением устройства 18 управления.
[0015]
Устройство 16 ввода представляет собой, например, устройство, такое как кнопочный переключатель или сенсорная панель, расположенная на экране дисплея, с помощью которой водитель может вводить информацию вручную, или микрофон, с помощью которого водитель может вводить информацию голосом. В настоящем варианте осуществления водитель может управлять устройством 16 ввода, тем самым вводя информацию настройки в ответ на информацию представления, которая представлена устройством 15 представления. ФИГ. 2 представляет собой вид спереди, иллюстрирующий часть устройства ввода 16 настоящего варианта осуществления, и представляет пример, включающий в себя набор кнопочных переключателей, расположенных на части со спицами или подобном элементе рулевого колеса. Проиллюстрированное устройство ввода 16 включает в себя кнопочные переключатели, используемые при включении/выключении функции автономного управления скоростью и функции автономного управления рулевым управлением устройства 18 управления, а кнопочные переключатели включают в себя главный переключатель (MAIN SW) 161, переключатель (RES +) возобновления/ускорения 162, переключатель установки/движения накатом (SET -) 163, переключатель отмены (CANCEL) 164, переключатель управления расстоянием между транспортными средствами (DISTANCE) 165 и переключатель помощи при смене полосы движения (L/C) 166.
[0016]
Главный переключатель 161 представляет собой переключатель для включения/выключения источника питания системы, который выполняет функцию автономного управления скоростью и функцию автономного управления рулевым управлением устройства 18 управления. Переключатель 162 возобновления/ускорения представляет собой переключатель для выключения работы функции автономного управления скоростью, а затем возобновления функции автономного управления скоростью на заданной скорости перед состоянием ВЫКЛ, для увеличения заданной скорости и/или для следования за предшествующим транспортным средством, чтобы остановиться, а затем перезапуститься. Переключатель 163 установки/движения накатом представляет собой переключатель для запуска функции автономного управления скоростью при скорости движения и/или снижения установленной скорости. Переключатель 164 отмены является переключателем для выключения функции автономного управления скоростью. Переключатель 165 управления расстоянием между транспортными средствами - это переключатель для установки расстояния между транспортными средствами от предшествующего транспортного средства и, например, переключатель для выбора одного из множества этапов настройки, таких как короткое расстояние/среднее расстояние/большое расстояние. Переключатель 166 помощи при смене полосы движения является переключателем для подачи команды (принятия) начала смены полосы движения, когда устройство 18 управления подтверждает начало смены полосы движения с водителем.
[0017]
Дополнительно или в качестве альтернативы набору кнопочных переключателей, показанных на фиг. 2, переключатели указателей поворота или другого бортового оборудования 14 также могут использоваться в качестве устройства ввода 16, и может быть принята конфигурация, при которой водитель включает переключатель указателей поворота в ответ на запрос от устройства 18 управления относительно того, выполнять ли смену полосы движения автоматически или автономно, и вводит согласие или разрешение на смену полосы движения. Информация о настройке, вводимая устройством ввода 16, выводится на устройство 18 управления.
[0018]
Устройство 17 управления вождением управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство движется с постоянной установленной скоростью или движется, чтобы следовать за предшествующим транспортным средством, используя функцию автономного управления скоростью, устройство 17 управления вождением управляет работой приводного механизма (включая работу двигателя внутреннего сгорания в случае автомобиля с двигателем или работу электродвигателя для движения в случае электромобиля, а также включая распределение крутящего момента для двигателя внутреннего сгорания и электродвигателя для движения в случае гибридного автомобиля) и операцией торможения для достижения ускорения/замедления и скорости движения, так что скорость рассматриваемого транспортного средства становится установленной скоростью или, когда есть предшествующее транспортное средство, расстояние между транспортными средствами между рассматриваемым транспортным средством и предшествующим транспортным средством становится постоянным расстоянием. Дополнительно или в качестве альтернативы, когда функция автономного управления рулевым управлением используется для выполнения управления удержанием полосы движения для обнаружения дорожных знаков полосы движения, по которой движется рассматриваемое транспортное средство (также в дальнейшем называемой полосой движения рассматриваемого транспортного средства) и управления местоположением движения транспортного средства, рассматриваемое транспортное средство в направлении ширины дороги, так что рассматриваемое транспортное средство движется, например, в центре полосы движения рассматриваемого транспортного средства, или когда для объекта используются функция помощи при смене полосы движения, функция помощи при обгоне или функция помощи при движении по маршруту транспортное средство для выполнения автоматического управления сменой полосы движения, такого как обгон предшествующего транспортного средства или изменение направления движения, или когда функция помощи при повороте вправо или влево используется для управления движением для поворота вправо или влево на перекрестке и рулевое управление рассматриваемого транспортного средства выполняется посредством управления работой рулевого привода в дополнение к работе механизма привода и t Операция торможения для достижения ускорения/замедления и скорости движения. Устройство 17 управления вождением управляет движением рассматриваемого транспортного средства в соответствии с инструкциями от устройства 18 управления, которые будут описаны ниже. Любой из других известных способов также может использоваться в качестве метода управления движением, выполняемого устройством 17 управления вождением.
[0019]
Устройство 18 управления состоит из постоянного запоминающего устройства (ПЗУ), в котором хранятся программы для управления движением рассматриваемого транспортного средства, центрального процессора (ЦП), который выполняет программы, хранящиеся в ПЗУ, и запоминающего устройства с произвольным доступом (ОЗУ), который служит доступным запоминающим устройством. В качестве замены или в дополнение к ЦП могут использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая вентильная матрица (FPGA) и тому подобное как рабочая схема.
[0020]
Устройство 18 управления выполняет программы, хранящиеся в ПЗУ, с использованием ЦП (процессора), тем самым обеспечивая функцию сбора информации о движении для получения информации, касающейся состояния движения рассматриваемого транспортного средства, и функцию автономного управления движением для автономного управления скоростью движения и/или рулевое управление рассматриваемого транспортного средства (функция автономного управления движением включает в себя функцию автономного управления скоростью для автономного управления скоростью движения рассматриваемого транспортного средства и функцию автономного управления рулевым управлением для автономного управления рулевым управлением рассматриваемого транспортного средства).
[0021]
Функция получения информации о движении устройства 18 управления является функцией, используемой для получения информации о движении, касающейся состояния движения рассматриваемого транспортного средства. Например, устройство 18 управления использует функцию получения информации движения для получения в качестве информации движения информации изображения внешней среды вокруг транспортного средства, захваченной передней камерой и задней камерой, включенными в датчики 11, и/или результатов обнаружения посредством переднего радара, заднего радара и боковых радаров, включенных в датчики 11. Дополнительно или в качестве альтернативы, устройство 18 управления использует функцию получения информации движения, чтобы получать в качестве информации движения информацию о скорости транспортного средства собственно рассматриваемого транспортного средства, определенную датчиком скорости транспортного средства, включенным в состав датчиков 11, и/или информацию изображения лица водителя, захваченную бортовой камерой, включенной в состав датчиков 11.
[0022]
Дополнительно или альтернативно, устройство 18 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении текущую информацию о местоположении рассматриваемого транспортного средства от устройства 12 определения местоположения рассматриваемого транспортного средства. Дополнительно или в качестве альтернативы, устройство 18 управления использует функцию сбора информации о движении, чтобы получать, в качестве информации о движении, информацию о местоположении изогнутых маршрутов и размер изогнутости (например, кривизну или радиус кривизны), точки слияния, точки ответвления, пункты оплаты проезда, местоположения, в которых количество полос уменьшается, зоны обслуживания (SA) / парковочные зоны (PA) и т. д. из картографической базы данных 13. Кроме того, устройство 18 управления использует функцию получения информации движения, чтобы получать в качестве информации движения информацию о работе с бортовым оборудованием 14, выполняемой водителем, от бортового оборудования 14.
[0023]
Здесь функция получения информации о движении будет описана со ссылкой на фиг. 3. ФИГ. 3 - блок-схема картографической базы данных 13 и устройства 18 управления. Устройство 18 управления имеет первую память 18a, вторую память 18b, блок 18c сбора данных и блок 18d управления движением. Первая память 18a - это память, которая временно хранит данные, полученные из картографической базы данных 13. Емкость первой памяти 18a меньше, чем емкость памяти картографической базы данных 13. Вторая память 18b - это память, которая временно хранит данные, полученные из первой памяти 18a. Емкость второй памяти 18b меньше, чем емкость первой памяти 18a.
[0024]
Блок 18c сбора данных представляет собой функциональный блок функции сбора информации о путешествии. Блок 18c сбора данных сохраняет и удаляет данные для первой памяти 18a и второй памяти 18b. Кроме того, блок 18c сбора данных получает данные, необходимые для автономного управления, из данных, хранящихся во второй памяти 18b, в соответствии с состоянием движения рассматриваемого транспортного средства и выводит полученные данные в блок 18d управления движением. Блок 18d управления движением представляет собой функциональный блок функции автономного управления движением.
[0025]
Картографическая база данных 13 хранит данные о конкретной области, например, по всей Японии. Данные, хранящиеся в картографической базе данных 13, используются для поиска маршрута в системе навигации. Блок 18c сбора данных сохраняет в первой памяти 18a информацию о дороге в пределах заранее определенного диапазона относительно текущего местоположения рассматриваемого транспортного средства среди картографической информации, хранящейся в картографической базе данных 13 . Например, блок 18c сбора данных сохраняет в первой памяти 18a дорожную информацию от текущего местоположения рассматриваемого транспортного средства до заранее определенного расстояния (например, 2 км) впереди. Информация о транспортном средстве, хранящаяся в первой памяти 18a, включает в себя информацию об осевой линии полосы движения, отметке полосы движения (белая линия), ограничении скорости, знаке и т.д.
[0026]
Кроме того, блок 18c сбора данных сохраняет во второй памяти 18b дорожную информацию в пределах заранее определенного диапазона относительно текущего местоположения рассматриваемого транспортного средства среди дорожной информации, сохраненной в первой памяти 18a. Например, блок 18c сбора данных сохраняет во второй памяти 18b дорожную информацию от текущего местоположения рассматриваемого транспортного средства до заранее определенного расстояния (например, 1 км) впереди. Когда дорожная информация от текущего местоположения рассматриваемого транспортного средства до предварительно определенного расстояния впереди сохраняется в первой памяти 18a и второй памяти 18b, предварительно определенное расстояние для хранения во второй памяти 18b короче, чем для хранения в первое воспоминание 18а.
[0027]
Блок 18c сбора данных получает только дорожную информацию, необходимую для автономного управления, из дорожной информации, хранящейся во второй памяти 18b, и выводит полученную дорожную информацию в блок 18d управления движением. В этой операции, когда дорога движения транспортного средства может быть ограничена множеством полос движения, блок 18c сбора данных выборочно получает дорожную информацию о дороге, по которой движется транспортное средство, и выводит полученную дорожную информацию в блок управления движением. 18d. Другими словами, когда дорога движения транспортного средства может быть ограничена множеством полос движения, блок 18c сбора данных извлекает дорожную информацию, сохраненную во второй памяти 18b, и выводит извлеченную дорожную информацию в блок 18d управления движением.
[0028]
Блок 18c сбора данных ограничивает проезжую часть транспортного средства из множества полос в зависимости от действий водителя и/или маршрута движения. Например, при условии, что дорога разветвляется перед текущим местоположением рассматриваемого транспортного средства, когда водитель задействует указатели поворота, чтобы мигать указателями поворота с левой стороны, блок 18c сбора данных ограничивает левостороннюю дорогу от разветвленных дорог.
[0029]
Описание будет сделано для примерного случая, в котором маршрут движения установлен таким образом, что транспортные средства выезжают за границу пункта оплаты проезда с шоссе и направляются на общую дорогу, а рассматриваемое транспортное средство приближается к развязке. В таком случае, когда водитель включает указатели поворота перед участком смены полосы движения, чтобы направиться на дорогу, ответвленную от главной дороги (дорога, отделенная от главной дороги и соединенная с пунктом оплаты проезда), дорога движения транспортного средства может быть ограничена. Информация о дороге для главной дороги и информация о дороге для разветвленной дороги сохраняются во второй памяти 18b, и блок 18c сбора данных выборочно получает информацию о дороге для разветвленной дороги с помощью пускового устройства указателей поворота и выводит информацию о выбранной дороге на блок управления движением 18d.
[0030]
Таким образом, когда дорога разветвляется перед текущим местоположением рассматриваемого транспортного средства и дорога для движения рассматриваемого транспортного средства может быть ограничена на основе состояния движения транспортного средства, рулевого управления водителя, маршрута движения и т.д., блок 18c сбора данных выборочно получает информацию о дороге и выводит ее в блок 18d управления движением. Дорожная информация о полосе движения, не имеющая отношения к автономному управлению рассматриваемым транспортным средством, не вводится в блок 18d управления движением, но вводится дорожная информация, необходимая для автономного управления рассматриваемым транспортным средством, и вычислительная нагрузка в блоке 18d управления движением, следовательно, может быть уменьшена.
[0031]
Функция автономного управления движением устройства 18 управления представляет собой функцию, используемую для автономного управления движением рассматриваемого транспортного средства без зависимости от действий водителя, и включает в себя функцию автономного управления скоростью, используемую для автономного управления скоростью движения рассматриваемого транспортного средства, и функцию автономного управления рулевым управлением, используемую для автономного управления рулевым управлением рассматриваемого транспортного средства. Функция автономного управления скоростью и функция автономного управления рулевым управлением настоящего варианта осуществления будут описаны ниже.
[0032]
«Функция автономного управления скоростью»
Функция автономного управления скоростью - это функция, используемая при обнаружении предшествующего транспортного средства для движения, чтобы следовать за предшествующим транспортным средством при выполнении управления расстоянием между транспортными средствами, чтобы поддерживать расстояние между транспортными средствами в соответствии со скоростью транспортного средства с верхним пределом скорости транспортного средства, которая устанавливается водителем, а также является функцией, используемой при обнаружении отсутствия предшествующего транспортного средства для выполнения движения с постоянной скоростью со скоростью транспортного средства, установленной водителем. Первое также называется управлением расстоянием между транспортными средствами, а второе - управлением постоянной скоростью. Функция автономного управления скоростью может включать в себя функцию, используемую при обнаружении ограничения скорости полосы движения с использованием функции сбора информации о движении для автоматического принятия скорости знака ограничения скорости в качестве установленной скорости транспортного средства.
[0033]
Чтобы активировать функцию автономного управления скоростью, водитель сначала приводит в действие переключатель 162 возобновления/ускорения или переключатель 163 установки/движения накатом устройства 16 ввода, проиллюстрированного на фиг. 2 для ввода желаемой скорости движения. Например, когда переключатель установки/движения накатом 163 нажат во время движения рассматриваемого транспортного средства со скоростью 70 км/ч, текущая скорость движения устанавливается без каких-либо изменений, но если скорость, желаемая водителем, составляет 80 км/ч, переключатель 162 возобновления/ускорения может быть нажат несколько раз для увеличения установленной скорости. Напротив, если скорость, желаемая водителем, составляет 60 км/ч, переключатель 163 установки/движения накатом можно нажимать множество раз для уменьшения установленной скорости. Расстояние между транспортными средствами, требуемое водителем, может быть выбрано, например, из множества этапов настроек, таких как короткое расстояние/среднее расстояние/большое расстояние, путем приведения в действие переключателя 165 регулировки расстояния между транспортными средствами устройства ввода 16, проиллюстрированного на ФИГ. 2.
[0034]
При управлении с постоянной скоростью устройство 17 управления вождением управляет работой приводного механизма, такого как двигатель и тормоз, при использовании датчиков 11, таких как передний радар, который обнаруживает препятствие впереди рассматриваемого транспортного средства, чтобы обнаружить, что не существует движущегося впереди рассматриваемого транспортного средства по его полосе движения и при обратной передаче данных о скорости транспортного средства, полученных датчиком скорости транспортного средства, чтобы поддерживать скорость движения, установленную водителем.
[0035]
При управлении расстоянием между транспортными средствами, устройство 17 управления вождением управляет работой приводного механизма, такого как двигатель и тормоз, при использовании датчиков 11, таких как передний радар, который обнаруживает препятствие впереди рассматриваемого транспортного средства, для обнаружения того, что есть предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения и обнаруживает расстояние между транспортными средствами (предшествующее транспортное средство в этом случае является транспортным средством, расположенным непосредственно перед рассматриваемым транспортным средством) и при отправке данных о расстоянии между транспортными средствами обнаруживается датчиками 11 (передним радаром), чтобы поддерживать расстояние между транспортными средствами, установленное водителем, с верхним пределом скорости движения, установленным водителем. Если предшествующее транспортное средство останавливается, пока рассматриваемое транспортное средство движется под управлением расстояния между транспортными средствами, рассматриваемое транспортное средство также прекращает следовать за предшествующим транспортным средством, и если предшествующее транспортное средство трогается с места в течение 30 секунд после остановки рассматриваемого транспортного средства, рассматриваемое транспортное средство также начинает движение. для повторного следования за предшествующим транспортным средством с помощью системы управления расстоянием между транспортными средствами. Если рассматриваемое транспортное средство останавливается более чем на 30 секунд, данное транспортное средство не запускается автоматически или автономно, даже когда предшествующее транспортное средство запускается, и после того, как предшествующее транспортное средство стартует, рассматриваемое транспортное средство начинает движение, чтобы снова следовать за предшествующим транспортным средством с помощью управление расстоянием между транспортными средствами, когда нажат переключатель 162 возобновления/ускорения или педаль акселератора.
[0036]
«Функция автономного управления рулевым управлением»
Функция автономного управления рулевым управлением - это функция, используемая для управления работой исполнительного механизма рулевого управления, тем самым выполняя управление рулевым управлением рассматриваемого транспортного средства. Эта функция автономного управления рулевым управлением включает в себя: функцию удержания полосы движения (функцию поддержания ширины полосы движения), при которой рулевое управление управляется таким образом, чтобы двигаться, например, близко к центру полосы движения, чтобы помочь водителю при рулевом управлении; функцию помощи при смене полосы движения, при которой, когда водитель управляет поворотным рычагом, рулевое управление управляется таким образом, чтобы помогать работе рулевого колеса, необходимой для смены полосы движения; функцию помощи при обгоне, при которой при обнаружении впереди транспортного средства, скорость которого ниже установленной, используется дисплей для подтверждения водителем, выполнять ли операцию обгона, и когда водитель нажимает переключатель приема, управляется рулевое управление для помощи при обгоне; функцию помощи при движении по маршруту, при которой, когда водитель вводит пункт назначения в навигационное устройство или подобное устройство и прибывает в точку смены полосы движения, необходимую для движения по маршруту, дисплей используется для подтверждения водителем того, следует ли выполнять полосу изменение, и когда водитель приводит в действие переключатель приемки, рулевое управление управляется для помощи при смене полосы движения; и другие функции.
[0037]
Функция помощи при движении по маршруту - это функция, используемая, когда маршрут движения к пункту назначения задан, для управления рулевым управлением, скоростью транспортного средства и указателями поворота, чтобы объект проезжал по маршруту движения. ФИГ. 4A - схема для описания траекторий движения и целевых точек при движении с главной дороги на полосу ответвления дороги с ответвлением. ФИГ. 4B - схематическая диаграмма, иллюстрирующая часть траекторий движения и целевых точек фиг. 4А. На 4A и 4B ось X представляет ось координат в поперечном направлении (направление ширины транспортного средства) транспортного средства, а ось Y представляет ось координат в направлении движения транспортного средства по главной дороге.
[0038]
Описание будет сделано для функции помощи при движении по маршруту, например, когда маршрут движения установлен для движения на развязке от главной дороги скоростной автомагистрали к платной дороге через полосу ответвления. Как показано на фиг. 4А полоса А представляет собой полосу ответвления, соединяющую главную дорогу с пунктом оплаты за проезд. Главная дорога включает полосы B и C, а полоса C является полосой для обгона.
[0039]
Когда пункт назначения устанавливается пользователем или тому подобным, устройство 180 управления вычисляет маршрут движения к пункту назначения. Устройство 180 управления выполняет функцию удержания полосы движения и функцию смены полосы движения для движения по маршруту движения. Устройство 180 управления выполняет каждую функцию на основе информации, распознанной из изображения камеры, и картографической информации, хранящейся в базе 13 данных. Информация, распознаваемая из изображения камеры, представляет собой реальную среду передвижения, и поэтому, когда знаки полосы движения могут быть распознаны из изображения камеры, устройство 180 управления предпочтительно использует информацию, распознанную из изображения камеры, для автономного управления транспортным средством. На дороге с ответвлением, показанной на фиг. 4А пунктирная ограничивающая линия нанесена между главной дорогой и полосой ответвления, но многие транспортные средства, направляющиеся с главной дороги на полосу ответвления, пересекают эту ограничивающую линию, поэтому часть ограничительной линии исчезла, и полосы движения могут не распознаваться по изображению с камеры. Дополнительно или альтернативно, форма развязки различается в зависимости от местоположения, а форма дороги полосы ответвления является сложной; поэтому знаки полосы движения могут не распознаваться на изображении с камеры при движении по дороге с ответвлением. Чтобы двигаться по маршруту движения в такой области, в которой знаки полосы движения не могут быть распознаны, устройство 180 управления автономно управляет транспортным средством на основе картографической информации, хранящейся в базе 13 данных.
[0040]
В настоящем варианте осуществления, область, в которой признак, подлежащий распознаванию для автономного управления, такой как знак полосы движения и/или препятствие, но который не может быть распознан из изображения камеры, предварительно указывается как нераспознаваемая область. Нераспознаваемая область представляет собой область, в которой внешняя ситуация транспортного средства не может быть распознано по изображению с камеры. Информация о размере и местоположении нераспознаваемой области предварительно сохраняется в картографической базе данных 13. Устройство 180 управления обращается к картографической базе данных 13, чтобы определить, есть ли нераспознаваемая область на маршруте движения, рассчитанном в транспортном средстве. Когда на маршруте движения есть нераспознаваемая зона, транспортное средство должно двигаться в нераспознаваемой зоне. В нераспознаваемой области функция удержания полосы движения не может работать с использованием информации, распознанной из изображения камеры, и поэтому устройство 180 управления выполняет функцию удержания полосы движения и/или функцию смены полосы движения, используя информацию о дороге, хранящуюся в картографической базе данных, в качестве замены для изображения с камеры. То есть, когда транспортное средство не движется в нераспознаваемой зоне, устройство 180 управления автономно управляет транспортным средством, используя информацию, распознанную из изображения с камеры, в то время как тогда, когда транспортное средство движется в нераспознаваемой зоне, устройство 180 управления автономно управляет транспортным средством с использованием дорожной информации, хранящейся в картографической базе данных, вместо изображения с камеры.
[0041]
При переключении с автономного управления на основе изображения камеры (также называемого в дальнейшем управлением камерой) на автономное управление на основе картографической информации (также называемого в дальнейшем картографическим управлением), если автономное управление переключается после подтверждения того, что объект, расположенный впереди транспортного средства, невозможно распознать по изображению с камеры, диапазон поведения транспортного средства может стать большим. Автономное управление транспортным средством включает в себя установку целевых точек на траектории движения транспортного средства и управление рулевым управлением таким образом, чтобы местоположение транспортного средства пересекало целевые точки. Траектория движения транспортного средства вычисляется путем вычислений, и когда используется изображение с камеры, например, центральная линия между распознанными правой и левой метками полосы движения устанавливается в качестве траектории движения (целевой траектории) транспортного средства. С другой стороны, когда используется картографическая информация, центральная линия полосы движения, включенная в картографическую информацию, задается как траектория движения транспортного средства. Каждая целевая точка устанавливается в местоположении, отделенном от текущего местоположения рассматриваемого транспортного средства на заранее определенное время движения (например, 1,25 секунды). Когда отклонение между отметками полосы движения, распознаваемыми по изображению с камеры, и отметками полосы движения, хранящимися в картографической информации, велико, отклонение целевых точек также велико. Следовательно, при переключении информации, используемой для автономного управления, с информации управления камерой на картографическую информацию управления после подтверждения того, что эта функция нераспознаваема по изображению камеры, диапазон поведения транспортного средства может стать большим из-за задержки переключения автономного режима управления и/или отклонения от целевых точек.
[0042]
В настоящем варианте осуществления предварительно определена нераспознаваемая область, и при выполнении автономного управления транспортным средством автономное управление на основе изображения камеры переключается на автономное управление на основе картографической информации до того, как транспортное средство входит в нераспознаваемую область.
[0043]
В примере, показанном на фиг. 4A, устройство 180 управления указывает заранее определенную область R, включающую дорогу с ответвлением, в качестве нераспознаваемой области. Нераспознаваемая зона A включает в себя, по меньшей мере, линию границы между главной дорогой и полосой, а также часть полосы ответвления.
[0044]
Устройство 180 управления устанавливает начальную точку P смены полосы движения, поскольку необходимо сменить полосу движения с главной дороги на полосу ответвления на дороге с ответвлением развязки. Точка начала смены полосы движения - это точка, в которой включается рулевое управление, так что транспортное средство движется в поперечном направлении (в поперечном направлении). Когда рассматриваемое транспортное средство движется по полосе B, устройство 180 управления устанавливает начальную точку P смены полосы движения на полосе B. Начальная точка P смены полосы движения устанавливается в местоположение перед точкой O, в которой начинается полоса ответвления, на заданное расстояние. Когда рассматриваемое транспортное средство движется по полосе B, точка начала смены полосы движения P устанавливается на полосе B. Когда рассматриваемое транспортное средство движется по полосе C, соответствующие точки начала смены полосы движения устанавливаются на полосе B и полосе C. В направлении движения транспортного средства расстояние от начальной точки смены полосы движения, установленной на полосе C, до начальной точки смены полосы движения, установленной на полосе B, устанавливается больше, чем расстояние от начальной точки смены полосы движения, установленной на полосе B до точки O, в которой начинается ответвление. Когда транспортное средство движется по полосе обгона C, необходимо дважды сменить полосу движения перед движением по полосе ответвления, и, следовательно, предоставляется более длинное заранее определенное расстояние для установки точки начала смены полосы движения на полосе C, чтобы можно было сменить полосу движения. иметь запас.
[0045]
Устройство 180 управления устанавливает точку Q подтверждения намерения для подтверждения намерения пользователя сменить полосу движения в местоположении перед точкой Р начала смены полосы движения на заданное расстояние. В момент, когда рассматриваемое транспортное средство достигает точки Q подтверждения намерения, устройство 180 управления делает подтверждение относительно того, следует ли сменить полосу движения водителю, посредством отображения на дисплее. Когда водитель задействует переключатель приема, блок 18c сбора данных устройства 180 управления получает информацию о дороге полосы A, которая является полосой ответвления, и не получает информацию о дороге полос B и C. Альтернативно, водитель управляет указателями поворота в том же направлении, что и направление смены полосы движения, блок 18c сбора данных устройства 180 управления получает информацию о дороге полосы A, которая является полосой ответвления, и не получает информацию о дороге полос B и C. Момент времени, в который блок 18c сбора данных устройства 180 управления получает информацию о дороге полосы A, может быть в момент начала мигания указателей поворота или иным образом после начала мигания указателей поворота. Мигание указателей поворота начинается в момент, когда рассматриваемое транспортное средство достигает точки Р начала смены полосы движения, и поэтому блок 18c сбора данных устройства 180 управления может получать информацию о полосе А в связи с миганием указателей поворота.
[0046]
С другой стороны, когда водитель не задействует переключатель приема или когда водитель включает указатели поворота в направлении, противоположном направлению смены полосы движения, определяется, что нет намерения менять полосу движения, и блок 18c сбора данных устройства 180 управления получает информацию о дороге полос B и C, включенных в главную дорогу, и не получает информацию о дороге полосы A. Полоса B включена в ту же дорогу, что и дорога, по которой в настоящее время находится транспортное средство. путешествия.
[0047]
Устройство 180 управления использует функцию удержания полосы движения для распознавания меток полосы движения на изображении камеры и затем управляет рулевым управлением таким образом, чтобы двигаться ближе к центру полосы B. Затем, когда намерение сменить полосу движения подтверждается и рассматриваемое транспортное средство достигает точки начала смены полосы движения P, устройство 180 управления использует функцию помощи при смене полосы движения для распознавания меток полосы движения на изображении камеры, затем вычисляет траекторию движения для смены полосы движения и управляет рулевым управлением таким образом, чтобы местоположение транспортного средства проходило через целевые точки на траектории движения. Это позволяет транспортному средству двигаться в поперечном направлении, так что расстояние между текущим местоположением транспортного средства и полосами движения с правой стороны увеличивается.
[0048]
Во время выполнения управления камерой, устройство 180 управления устанавливает точку переключения управления на дороге с ответвлением при подготовке к переключению с управления камерой на картографическое управление. Точка переключения управления устанавливается, например, в точке пересечения между центральной линией между правой и левой метками полосы движения, распознаваемыми по изображению с камеры (или выносной линией, полученной путем продолжения центральной линии), и центральной линией полосы движения. включены в картографическую информацию (полоса движения, включая полосу ответвления) (или линия продолжения, полученная путем продолжения центральной линии). В качестве альтернативы, точка переключения управления устанавливается в местоположение, в котором отклонение меньше заданной длины между центральной линией между правой и левой метками полосы движения, распознаваемыми по изображению с камеры (или выносной линией, полученной путем продолжения центральной линии) и центральной линией полосы движения, включенной в картографическую информацию (полоса, включая полосу ответвления) (или линия продолжения, полученная путем продолжения центральной линии). Точка переключения управления установлена в месте за пределами нераспознаваемой области и на центральной линии полосы B. В примере на фиг. 4A, точка переключения управления устанавливается в местоположение точки P начала смены полосы движения. Когда транспортное средство достигает точки P переключения управления (точка P начала смены полосы движения), устройство 180 управления переключается с управления камерой на картографическое управление. После переключения с управления камерой на картографическое управление автономное управление транспортным средством выполняется так, что транспортное средство движется по центральной линии полосы движения, включенной в дорожную информацию A, и транспортное средство движется по полосе ответвления.
[0049]
Пока транспортное средство движется в нераспознаваемой зоне или после того, как транспортное средство прошло через нераспознаваемую зону, устройство 180 управления вычисляет время переключения от картографического управления к управлению камерой. Во время движения в нераспознаваемой области или после прохождения через нераспознаваемую область устройство 180 управления вычисляет целевую точку (также называемую в дальнейшем первой целевой точкой), используя изображение с камеры. Когда метки полосы движения не могут быть стабильно распознаны по изображению с камеры в нераспознаваемой области, первая целевая точка вычисляется после достижения состояния, в котором знаки полосы движения могут быть распознаны. Кроме того, устройство 180 управления вычисляет целевую точку (далее также называемую второй целевой точкой) с использованием информации о дороге A. Затем, когда разница между первой целевой точкой и второй целевой точкой становится заранее заданным значением или меньше, устройство 180 управления переключается с картографического управления на управление камерой.
[0050]
Как показано на фиг. 4B кривая CL представляет траекторию движения, вычисленную из изображения с камеры, а кривая ML представляет траекторию движения, вычисленную на основе картографической информации (дорожной информации A). Первая целевая точка C представлена местоположением (Xc, Yc), а вторая целевая точка M представлена местоположением (XM, YM). В предположении, что текущее местоположение транспортного средства является исходной точкой, вычисляется угол (θC), образованный между осью X и отрезком линии, соединяющим исходную точку и первую целевую точку C. Кроме того, также в предположении, что текущее местоположение транспортного средства является исходной точкой, вычисляется угол (θM), образованный между осью X и отрезком линии, соединяющим исходную точку и вторую целевую точку M. Углы (θC, θM) вычисляются по следующим уравнениям (1) и (2).
[Уравнение 1]

[Уравнение 2]

[0051]
Путем вычитания угла (θM) из угла (θC) вычисляется разность между первой целевой точкой и второй целевой точкой. Разница рассчитывается как абсолютная величина. Затем рассчитанная разница сравнивается с предварительно установленным порогом (Δθth). То есть устройство 180 управления определяет, удовлетворяется или нет условие следующего уравнения (3).
[Уравнение 3]

[0052]
Когда абсолютное значение вычисленной разности не превышает пороговое значение (Δθth), устройство 180 управления переключается с картографического управления на управление камерой и автономно управляет транспортным средством, так что местоположение транспортного средства пересекает первую целевую точку.
[0053]
В примере на фиг. 4B, разность между углом (θC1), вычисленным для первой целевой точки C1, и углом (θM1), вычисленным для второй целевой точки M1, больше порогового значения (Δθth). Соответственно, в момент, когда вычисляется вторая целевая точка M1, устройство 180 управления продолжает картографическое управление. Разница между углом (θC2), вычисленным для первой целевой точки C2, и углом (θM2), вычисленным для второй целевой точки M2, меньше порогового значения (Δθth). Соответственно, в момент, когда рассматриваемое транспортное средство проезжает первую целевую точку C2, устройство 180 управления переключается с картографического управления на управление камерой. Благодаря этой операции можно предотвратить увеличение диапазона поведения транспортного средства при переключении с картографического управления на управление камерой.
[0054]
ФИГ. 5 является блок-схемой, иллюстрирующей переход между состояниями каждой функции, установленной в устройстве 18 управления. На фигуре система означает автономную систему управления движением, реализованную устройством 18 управления. Когда главный переключатель 161 на фиг. 2 включается из состояния ВЫКЛ системы, показанного на рисунке, система переходит в состояние ожидания. Из этого состояния ожидания автономное управление скоростью активируется путем включения переключателя 163 установки/движения накатом или переключателя 162 возобновления/ускорения по фиг. 2. Это позволяет начать вышеописанное управление постоянной скоростью или управление расстоянием между транспортными средствами, и водитель может управлять рассматриваемым транспортным средством, просто управляя рулевым колесом, не нажимая на акселератор или тормоз.
[0055]
Во время выполнения автономного управления скоростью, когда условие (1) на фиг. 5 выполняется, режим переходит в режим удержания полосы движения режима автономного рулевого управления/ручного режима. Примеры условия (1) включают в себя, но не ограничиваются перечисленным, условие, при котором выполняются все следующие условия: обнаруживаются дорожные знаки с обеих сторон рассматриваемого транспортного средства; водитель держит руль; транспортное средство движется по центру полосы движения; указатели поворота не работают; стеклоочиститель не работает на высокой скорости (HI); и когда предоставляется высокоточная карта, в пределах примерно 200 м впереди нет пункта пропуска, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается. Ручной режим относится к режиму, в котором автономное управление рулевым управлением не работает, если водитель не держит рулевое колесо, в то время как режим без участия водителя относится к режиму, в котором автономное управление рулевым управлением работает, даже когда водитель отпускает рулевое колесо.
[0056]
Во время выполнения режима удержания полосы движения режима автономного рулевого управления/ручного режима, когда условие (2) на фиг. 5 выполняется, режим переходит в режим удержания полосы движения режима автономного рулевого управления/режима без участия водителя. Примеры условия (2) включают в себя, но не ограничиваются ими, условие, при котором выполняются все следующие условия: рассматриваемое транспортное средство движется по автомобильной дороге; транспортное средство движется по дороге, конструктивно отделенной от встречной полосы; транспортное средство движется по дороге, для которой подготовлена высокоточная карта; транспортное средство движется со скоростью не выше установленной скорости; сигналы GPS эффективны; водитель держит руль; водитель смотрит вперед; в пределах 800 м впереди нет дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается; в пределах 500 м впереди нет резкого поворота 100R или меньше; транспортное средство не движется по туннелю, превышающему 500 м от входа в туннель; и педаль акселератора не нажата.
[0057]
Напротив, во время выполнения режима удержания полосы движения режима автономного рулевого управления/режима без участия водителя, когда условие (3) на фиг. 5 выполняется, режим переходит в режим удержания полосы движения режима автономного рулевого управления/ручного режима. Примеры условия (3) включают, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: рассматриваемое транспортное средство движется по дороге, отличной от автомобильной дороги; транспортное средство движется на участке с двусторонним движением; транспортное средство движется по дороге, для которой не подготовлена высокоточная карта; транспортное средство движется со скоростью выше установленной; сигналы GPS больше не принимаются; водитель не поворачивается лицом вперед в течение 5 секунд после срабатывания сигнализации прямого взгляда; камера монитора водителя больше не может обнаружить водителя; в пределах 800 м впереди есть любой из дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается; при движении со скоростью транспортного средства менее примерно 40 км/ч имеется крутой поворот 100R или менее в пределах примерно 200 м впереди; при движении со скоростью около 40 км/ч или более впереди на расстоянии около 200 м имеется резкий поворот 170R или менее; транспортное средство движется по туннелю, превышающему 500 м от входа в туннель; водитель нажал на педаль акселератора, удерживая руль; и сработала приближающаяся тревога.
[0058]
Во время выполнения режима удержания полосы движения режима автономного рулевого управления/режима без участия водителя, когда условие (4) на фиг. 5 выполняется, автономное управление рулевым управлением прекращается и переходит в автономное управление скоростью. Примеры условия (4) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: дорожные знаки с обеих сторон рассматриваемого транспортного средства больше не обнаруживаются в течение определенного периода времени; водитель управлял рулевым колесом; и стеклоочиститель ветрового стекла работал на высокой скорости (HI). Во время выполнения режима удержания полосы движения в режиме автономного рулевого управления/режиме без участия водителя, когда условие (5) на фиг. 5, автономное управление рулевым управлением и автономное управление скоростью останавливаются и переходят в состояние ожидания. Примеры условия (5) включают, но не ограничиваются ими, условие, при котором удовлетворяется любое из следующих условий: водитель нажал на тормоз; водитель задействовал переключатель 164 отмены по фиг. 2; открылась одна или несколько дверей рассматриваемого транспортного средства; ремень безопасности водителя был отпущен; датчик сиденья обнаружил, что водителя больше нет на сиденье водителя; рычаг выбора перешел в местоположение, отличное от «D» или «M»; стояночный тормоз задействован; противоскользящая тормозная система автомобиля выключена; противоскользящая тормозная система сработала; включен режим снега; сработал аварийный тормоз; состояние остановки продолжается около 3 минут после остановки транспортного средства из-за управления скоростью транспортного средства; передняя камера обнаружила плохую видимость, например, неспособность правильно распознать объект из-за грязи, подсветки, дождя/туман и тому подобного; передний радар обнаружил экранирование или радиопомехи; передний радар обнаружил отклонение оси; боковой радар обнаружил экранирование или радиопомеху; и боковой радар обнаружил отклонение оси.
[0059]
Во время выполнения режима автономного рулевого управления/ручного режима, когда условие (6) на фиг. 5 выполняется, автономное управление рулевым управлением прекращается и переходит в автономное управление скоростью. Примеры условия (6) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: дорожные знаки с обеих сторон рассматриваемого транспортного средства больше не обнаруживаются; водитель управлял рулевым колесом; водитель включил указатели поворота; стеклоочиститель сработал на высокой скорости (HI); транспортное средство прибыло на участок взимания платы за проезд при составлении высокоточной карты; и передняя камера обнаружила плохую видимость, например невозможность правильно распознать объект из-за грязи, подсветки, дождя/тумана и т.п. Во время выполнения режима автономного рулевого управления/ручного режима, когда условие (7) на фиг. 5, автономное управление рулевым управлением и автономное управление скоростью останавливаются и переходят в состояние ожидания. Примеры условия (7) включают, но не ограничиваются ими, условие, при котором удовлетворяется любое из следующих условий: водитель нажал на тормоз; водитель задействовал переключатель 164 отмены по фиг. 2; открылась одна или несколько дверей рассматриваемого транспортного средства; ремень безопасности водителя был отпущен; датчик сиденья обнаружил, что водителя больше нет на сиденье водителя; рычаг выбора перешел в местоположение, отличное от «D» или «M»; стояночный тормоз задействован; противоскользящая тормозная система автомобиля выключена; противоскользящая тормозная система сработала; включен режим снега; аварийный тормоз сработал; состояние остановки продолжается около 3 минут после остановки транспортного средства из-за управления скоростью транспортного средства; передний радар обнаружил экранирование или радиопомехи; и передний радар обнаружил отклонение оси.
[0060]
Во время выполнения автономного управления скоростью, когда условие (8) на фиг. 5 выполняется, управление переходит в состояние ожидания. Примеры условия (8) включают, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: водитель нажал на тормоз; водитель задействовал переключатель 164 отмены по фиг. 2; открылась одна или несколько дверей рассматриваемого транспортного средства; ремень безопасности водителя был отпущен; датчик сиденья обнаружил, что водителя больше нет на сиденье водителя; рычаг выбора перешел в местоположение, отличное от «D» или «M»; стояночный тормоз задействован; противоскользящая тормозная система автомобиля выключена; противоскользящая тормозная система сработала; включен режим снега; аварийный тормоз сработал; состояние остановки продолжается около 3 минут после остановки транспортного средства из-за управления скоростью транспортного средства; передний радар обнаружил экранирование или радиопомехи; и передний радар обнаружил отклонение оси.
[0061]
Во время выполнения режима удержания полосы движения режима автономного рулевого управления/режима без участия водителя, когда условие (9) на фиг. 5, режим переходит в режим смены полосы движения режима автономного рулевого управления/ручного режима. Примеры условия (9) включают в себя, но не ограничиваются ими, условие, при котором удовлетворяется любое из следующих условий: когда система предложила смену полосы движения, водитель нажал переключатель 166 помощи при смене полосы движения по фиг. 2; и водитель включил указатели поворота.
[0062]
Во время выполнения режима смены полосы движения режима автономного рулевого управления/ручного режима, когда условие (10) на фиг. 5 выполняется, режим переходит в режим удержания полосы движения режима автономного рулевого управления/ручного режима. Примеры условия (10) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: ограничение скорости было превышено до начала выполнения смены полосы движения (далее сокращенно LCP); водитель нажал на педаль акселератора, удерживая руль до запуска LCP; LCP больше не может быть запущен в течение 10 секунд после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения, когда впереди идет медленно движущийся транспортное средство; LCP больше не может быть запущен, и транспортное средство подошло слишком близко к точке разветвления после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения для движения по маршруту; маневр по смене полосы движения (далее сокращенно LCM) больше не может быть начат в течение 5 секунд после срабатывания LCP; скорость автомобиля упала ниже 50 км/ч после запуска LCP и до запуска LCM; на соседней полосе больше нет места, необходимого для смены полосы движения после работы с LCP и перед запуском LCM; водитель выполнил операцию отмены перед запуском LCM; дорожные знаки больше не могут быть обнаружены до запуска LCM; перед запуском LCM было определено, что нет соседней полосы движения в направлении смены полосы движения или что на определенном расстоянии впереди не будет смежной полосы движения; перед запуском LCM было определено, что впереди на определенном расстоянии имеется кривая с радиусом кривизны 250 м или менее; перед запуском LCM было определено, что на определенном расстоянии впереди есть участок, на котором тип разметки полосы движения запрещает смену полосы движения на соседнюю полосу; боковой радар обнаружил экранирование или радиопомехи перед запуском LCM; боковой радар обнаружил отклонение оси до запуска LCM; сработала ручная сигнализация (это условие устанавливается, когда выполняется одно из следующих условий: водитель не держит рулевое колесо в течение примерно 2 секунд после срабатывания LCP; водитель не удерживает рулевое колесо в течение примерно 2 секунд. секунд после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения, когда впереди идет медленно движущийся транспортное средство; и водитель не удерживает рулевое колесо в течение примерно 2 секунд после нажатия переключателя 166 помощи при смене полосы движения во время предложения смена полосы движения для движения по маршруту); водитель выключил указатели поворота; и LCP была завершена.
[0063]
Система выключается, когда главный выключатель 161 выключен в любом из режима автономного рулевого управления/режима без участия водителя, автономного рулевого управления/ручного режима, автономного управления скоростью и состояния ожидания.
[0064]
Затем будет описан процесс управления движением согласно настоящему варианту осуществления со ссылкой на фиг. с 6a по 6c. Фиг. 6A-6C - блок-схемы, иллюстрирующие процесс управления движением согласно настоящему варианту осуществления. Устройство 18 управления выполняет процесс управления движением, который будет описан ниже, с заранее определенными интервалами времени. Следующее описание будет сделано при предположении, что устройство 18 управления использует функцию автономного управления движением для выполнения автономного управления скоростью и автономного управления рулевым управлением, и рассматриваемое транспортное средство движется по маршруту, который требует смены полосы движения для движения по маршруту движения из-за приближения к развязке, когда управление удержанием полосы движения для управления движущимся местоположением рассматриваемого транспортного средства в направлении ширины выполняется так, что рассматриваемое транспортное средство движется по полосе движения со скоростью, которая устанавливается водителем.
[0065]
Сначала на этапе S1 по фиг. 6A, выполняется определение того, включен ли главный переключатель 161 устройства 18 управления, и когда главный переключатель 161 выключен, этап S1 повторяется до тех пор, пока главный переключатель 161 не будет включен. Когда главный переключатель 161 включен, процесс переходит к этапу S2, на котором определяется, установлена ли скорость движения водителем. Если скорость движения не установлена, процесс возвращается к этапу S1, с которого этапы S1 и S2 повторяются до тех пор, пока скорость движения не будет установлена. Установка скорости движения выполняется водителем, приводящим в действие переключатель 162 возобновления/ускорения или переключатель 163 установки/движения накатом устройства 16 ввода, проиллюстрированного на фиг. 2 для ввода желаемой скорости движения.
[0066]
Когда скорость движения установлена, запускается автономное управление скоростью. На этапе S3 передний радар (из числа датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения, и когда есть предшествующее транспортное средство. транспортного средства, процесс переходит к этапу S4, на котором выполняется управление расстоянием между транспортными средствами, в то время как, когда нет предшествующего транспортного средства, процесс переходит к этапу S5, на котором выполняется управление с постоянной скоростью. Это позволяет водителю вести рассматриваемое транспортное средство с желаемой скоростью, просто управляя рулевым колесом, не нажимая на акселератор или тормоз.
[0067]
Во время выполнения управления расстоянием между транспортными средствами на этапе S4 или управления постоянной скоростью на этапе S5 на этапе S6 выполняется определение того, удовлетворяется ли вышеописанное условие (1) для перехода в режим удержания полосы движения автономное рулевое управление/ручной режим. Когда условие (1) удовлетворяется, процесс переходит к этапу S7, а когда условие (1) не удовлетворяется, процесс возвращается к этапу S2.
[0068]
На этапе S7 передний радар (из числа датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения, и когда есть предшествующее транспортное средство, процесс переходит к этапу S8, на котором выполняется режим управления расстоянием между транспортными средствами/удержания полосы движения, в то время как при отсутствии предшествующего транспортного средства процесс переходит к этапу S9, на котором выполняется режим управления постоянной скоростью/удержания полосы движения. выполнен. Автономное управление на этапе S8 или S9 - это управление на основе изображения с камеры.
[0069]
Во время выполнения режима управления расстоянием между транспортными средствами/удержания полосы движения на этапе S8 или режима управления с постоянной скоростью/удержания полосы движения на этапе S9 выполняется определение на последующем этапе S10 на фиг. 6B относительно того, установлен ли пункт назначения. Если место назначения не установлено, процесс возвращается к этапу S2 на фиг. 6А. Когда пункт назначения установлен, процесс переходит к этапу S11, на котором выполняется помощь при движении по маршруту. При помощи в движении по маршруту, когда необходимо сменить полосу движения, чтобы проехать по маршруту движения, устанавливаются точка начала смены полосы движения и точка подтверждения намерения для подтверждения намерения сменить полосу движения. На этапе S12 делается ссылка на картографическую информацию, хранящуюся в картографической базе данных 13, и на маршруте движения указывается нераспознаваемая область. В этой операции, когда начальная точка смены полосы движения включена в нераспознаваемую область, начальная точка смены полосы движения снова устанавливается так, чтобы она находилась за пределами нераспознаваемой области. На этапе S13 определяется, достигло ли текущее местоположение транспортного средства точки подтверждения намерения, и когда текущее местоположение транспортного средства не достигло точки подтверждения намерения, процесс возвращается к этапу S11, в то время как когда текущее местоположение транспортного средства достигло точки подтверждения намерения, на дисплее отображается экран дисплея, чтобы подтвердить намерение водителя относительно того, выполнять ли смену полосы движения или нет.
[0070]
На этапе S14 определяется, имеется ли намерение сменить полосу движения. Когда водитель задействует переключатель приема после отображения дисплея, определяется, что есть намерение сменить полосу движения, и процесс переходит к этапу S15, в то время как, когда переключатель приема не приводится в действие, определяется, что есть нет намерения менять полосу движения, и процесс переходит к этапу S19.
[0071]
На этапе S15 определяется, удовлетворяется или нет условие смены полосы движения. Условие смены полосы движения - это состояние (9), проиллюстрированное на фиг. 5. Однако, когда условие (9) на фиг. 5, включает в себя условие, что знаки полосы движения распознаются, и условие, что соседняя полоса включает пространство, необходимое для смены полосы движения, эти условия исключаются из условия смены полосы движения, которое должно быть установлено в процессе определения на этапе S15. Когда условие смены полосы движения удовлетворяется, процесс переходит к этапу S16, а когда условие смены полосы движения не удовлетворяется, процесс переходит к этапу S19.
[0072]
На этапе S16 определяется, достигло ли текущее местоположение транспортного средства начальной точки смены полосы движения, и когда текущее местоположение транспортного средства достигло начальной точки смены полосы движения, процесс переходит к этапу S17, в то время как, когда текущее местоположение транспортного средства не достигло начальной точки смены полосы движения, процесс возвращается к этапу S16. Когда транспортное средство движется так, чтобы не следовать маршруту движения до достижения начальной точки смены полосы движения (например, когда транспортное средство движется на полосу движения, смежную с текущей полосой движения), процесс переходит к этапу S19.
[0073]
На этапе S17 устройство 180 управления начинает мигать указателями поворота. На этапе S18 устройство 180 управления получает информацию о дороге для полосы движения A, которая является полосой ответвления, среди информации о дороге, сохраненной во второй памяти 18b, и процесс переходит к этапу S20. В случае, когда информация о полосе ответвления уже была получена, когда текущее местоположение транспортного средства достигает точки подтверждения намерения или начальной точки смены полосы движения, информация о дороге полосы движения A, расположенной перед полосой ответвления, для которой информация уже получена, получена. На этапе S19 устройство 180 управления получает информацию о дороге полос B и C, которые включены в главную дорогу, среди информации о дороге, сохраненной во второй памяти 18b, и процесс возвращается к этапу S2 на фиг. 6А.
[0074]
На этапе S20 автономное управление на основе изображения с камеры переключается на автономное управление на основе картографической информации, и выполняется помощь при смене полосы движения. Помощь при смене полосы движения на этапе S20 выполняется в ручном режиме. При автономном управлении на основе картографической информации целевые точки M вычисляются с использованием информации о дороге полосы движения A, а рулевое управление управляется таким образом, чтобы транспортное средство проезжало целевые точки M. Во время автономного управления на основе картографической информации, вычисление целевых точек M многократно выполняется в заранее заданном цикле, а рулевое управление управляется таким образом, чтобы транспортное средство проезжало каждую из рассчитанных целевых точек M.
[0075]
На этапе S21 определяется, можно ли распознать метки полосы движения по изображению с камеры, и, когда знаки полосы движения могут быть распознаны, процесс переходит к этапу S22, в то время как, когда знаки полосы движения не могут быть распознаны, процесс возвращается к этапу S20. Определение на этапе S21 может выполняться, например, по истечении заданного времени с момента времени, в который автономное управление на основе изображения с камеры было переключено на автономное управление на основе картографической информации. Продолжительность заранее определенного времени может быть установлена равной или большей, чем продолжительность времени от начала до завершения смены полосы движения. На этапе S22 вычисляются целевые точки C и M. То есть каждая целевая точка C вычисляется в дополнение к каждой целевой точке M. На этапе S23 вычисляются углы (θC, θM). На этапе S24 вычисляется разность (|θC-θM|) между первой целевой точкой и второй целевой точкой, и определяется, является ли вычисленная разница (|θC-θM|) порогом (Δθth) или меньше. Когда разность (|θC-θM|) является пороговым значением (Δθth) или меньше, автономное управление на основе картографической информации переключается на автономное управление на основе изображения камеры (S29). В примере на фиг. 4A, смена полосы движения на дороге с ответвлением завершена, и пока транспортное средство движется по полосе ответвления, автономное управление на основе картографической информации переключается на автономное управление на основе изображения с камеры.
[0076]
Когда разность (|θC-θM|) больше порогового значения (Δθth), на этапе S26 выполняется определение того, превышает ли состояние, в котором разность (|θC-θM|) пороговое значение (Δθth) продолжается в течение заданного времени (например, 10 секунд). Когда заранее определенное время (например, 10 секунд) не истекло, процесс возвращается к этапу S22, в то время как, когда заранее определенное время (например, 10 секунд) истекло, автономное управление рулевым управлением отключается и переключается на операцию рулевого управления водителем. Поток управления на этапе S20 и последующих этапах выполняется в ручном режиме, и поэтому, когда автоматическое управление рулевым управлением отключено на этапе S27, водитель держит рулевое колесо, и водитель может плавно выполнять операцию рулевого управления. Когда состояние, в котором знаки полосы движения могут быть распознаны по изображению камеры, достигается во время выполнения автономного управления на основе картографической информации, если картографическое управление переключается на управление камерой в состоянии, в котором разница между первым целевая точка (целевая точка C) и вторая целевая точка (целевая точка M) большие, диапазон поведения транспортного средства становится большим. Следовательно, в настоящем варианте осуществления, когда состояние, в котором разница между первой целевой точкой (целевой точкой C) и второй целевой точкой (целевой точкой M) является большой, продолжается в течение предварительно определенного времени или более, автономное управление рулевым управлением выключено, и тем самым можно предотвратить увеличение диапазона поведения транспортного средства при переключении управления.
[0077]
Как описано выше, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, когда нераспознаваемая область присутствует на маршруте движения транспортного средства, автономное управление на основе изображения карты (соответствующего «первое автономное управление» настоящего изобретения) переключается на автономное управление на основе картографической информации (соответствующей «второму автономному управлению» настоящего изобретения) до того, как транспортное средство войдет в нераспознаваемую зону. Автономное управление на основе изображения с камеры - это автономное управление транспортным средством с использованием информации, распознанной из изображения с камеры, а автономное управление на основе картографической информации - это автономное управление транспортным средством с использованием картографической информации, хранящейся в картографической базе данных 13. Это может предотвратить увеличение диапазона поведения транспортного средства из-за отклонения целевых точек при переключении режима автономного управления. В результате можно предотвратить чувство дискомфорта у пассажиров из-за поведения транспортного средства.
[0078]
Кроме того, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, когда разница между первой целевой точкой и второй целевой точкой составляет предварительно определенное значение или меньше после переключения с первого автономного управления на вторую автономное управление, второе автономное управление переключается на первое автономное управление. Это может предотвратить увеличение диапазона поведения транспортного средства при переключении со второго автономного управления на первое автономное управление.
[0079]
Кроме того, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, когда состояние, в котором разность между первой целевой точкой и второй целевой точкой больше заранее определенного значения, продолжается в течение заранее определенного времени или Более того, после переключения с первого автономного управления на второе автономное управление функция автономного управления рулевым управлением отключается. Это может предотвратить переключение картографического управления на управление камерой в состоянии, в котором разница между первой целевой точкой и второй целевой точкой велика, и можно предотвратить увеличение диапазона поведения транспортного средства.
[0080]
Кроме того, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, когда разница между первой целевой точкой и второй целевой точкой больше, чем заранее определенное значение после переключения с первого автономного управления на второе автономное управление, второе автономное управление продолжается. Это может предотвратить переключение картографического управления на управление камерой в состоянии, в котором разница между первой целевой точкой и второй целевой точкой велика, и можно предотвратить увеличение диапазона поведения транспортного средства.
[Описание позиционных обозначений]
[0081]
1 Устройство управления движением
11 Датчики
12 Устройство определения местоположения рассматриваемого транспортного средства
13 Картографическая база данных
14 Бортовое оборудование
15 Устройство представления
16 Устройство ввода
161 Главный переключатель
162 Переключатель возобновления/ускорения
163 Переключатель установки/движения накатом
164 Переключатель отмены
165 Переключатель управления расстоянием между транспортными средствами
166 Переключатель помощи при смене полосы движения
167 Экран дисплея
168 Кнопка ВКЛ.
169 Кнопка ВЫКЛ.
17 Устройство управления вождением
18 Устройство управления
18a Первая память
18b Вторая память
18c Блок сбора данных
18d Блок управления движением
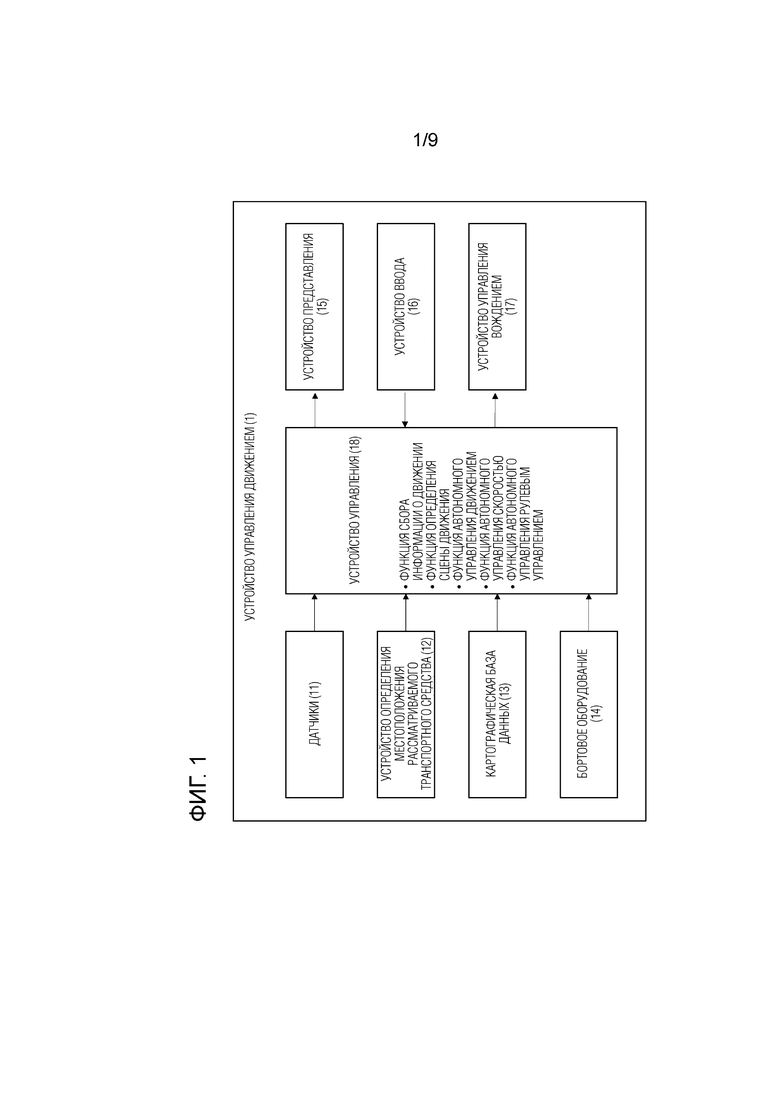
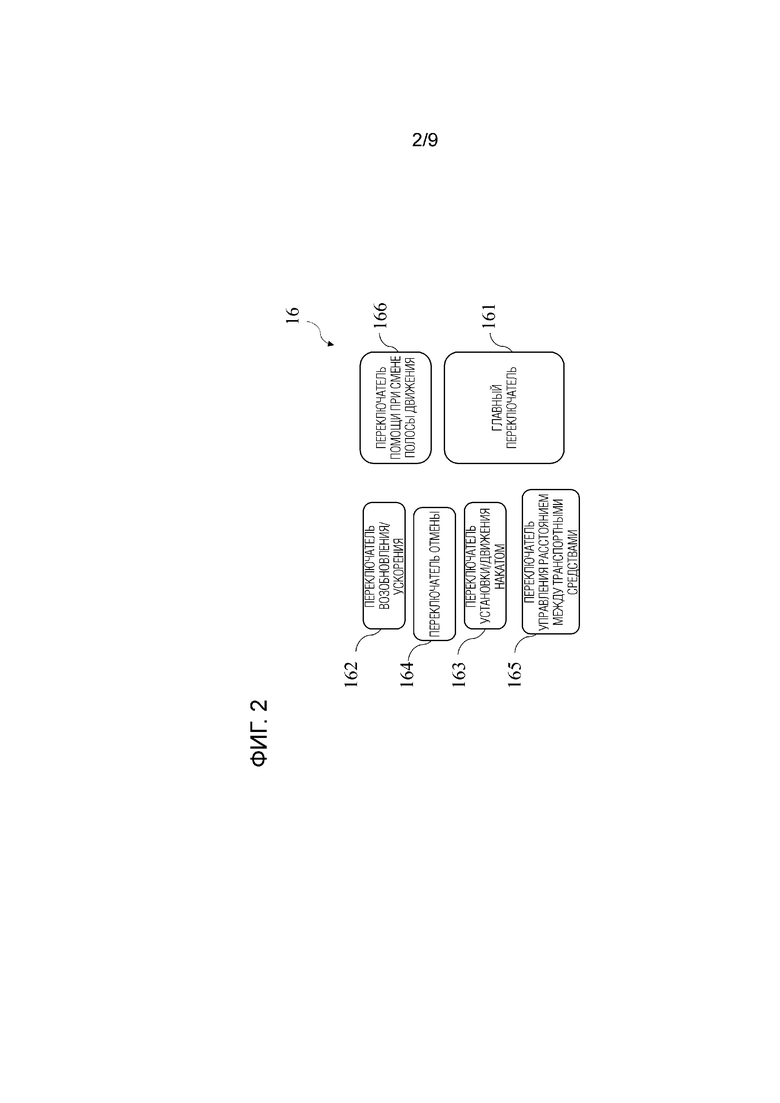
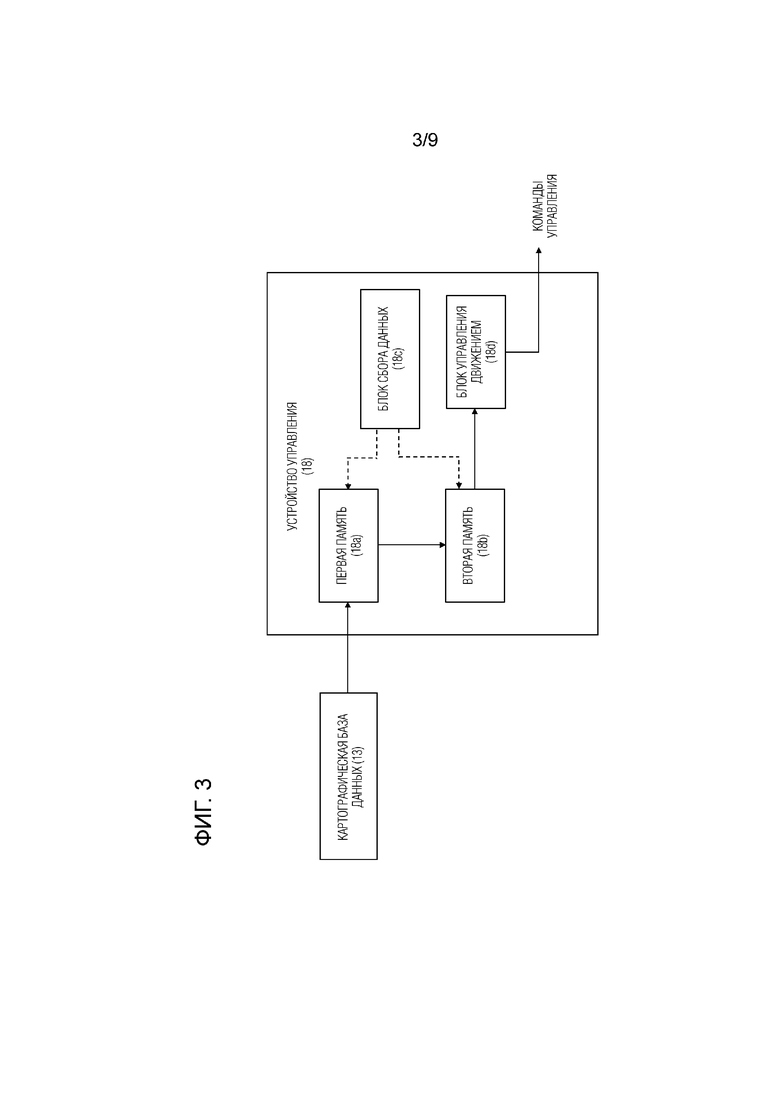
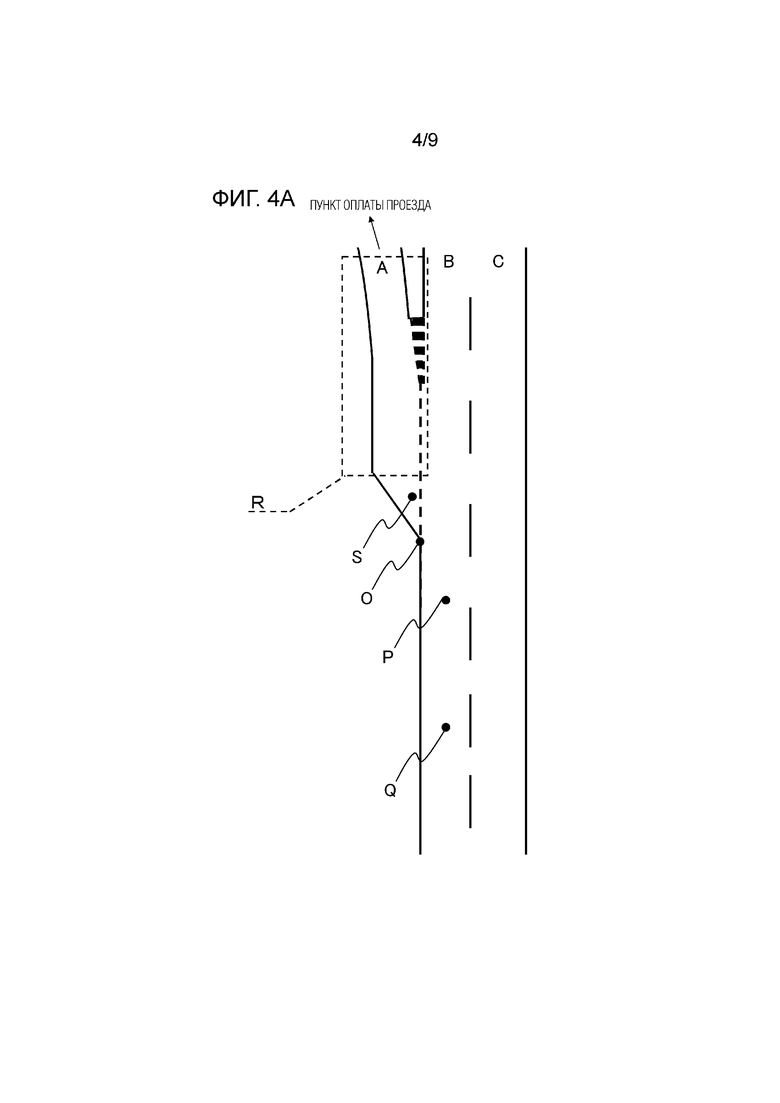
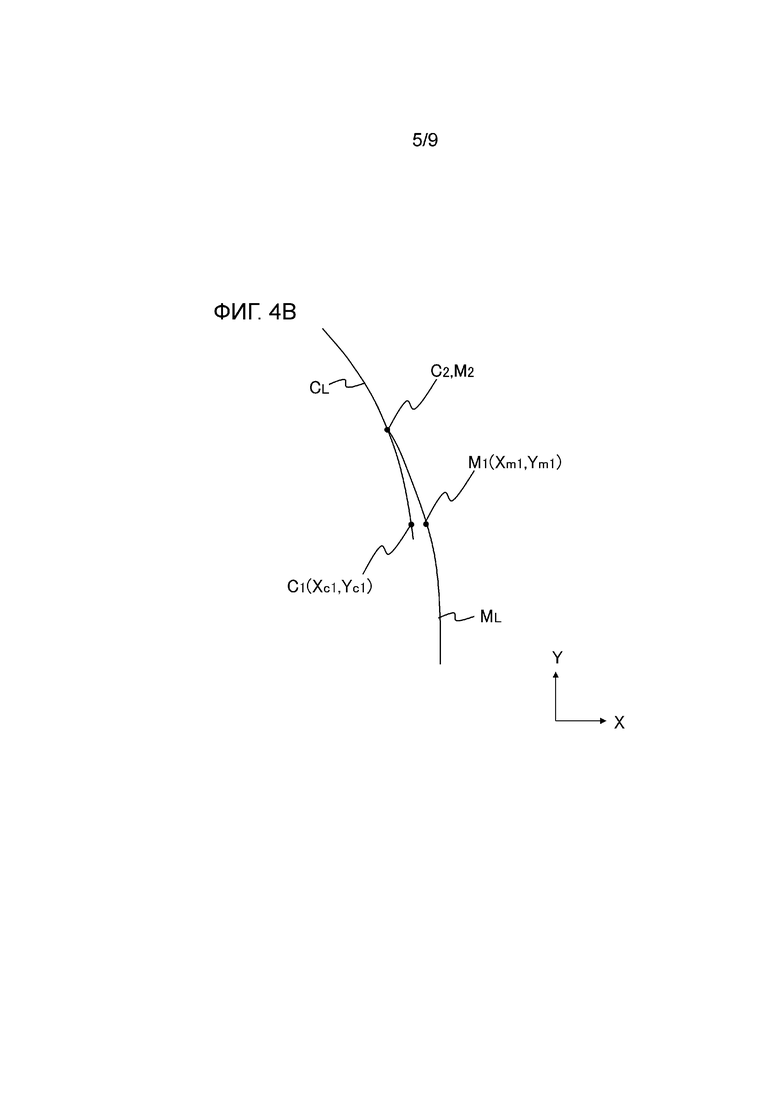
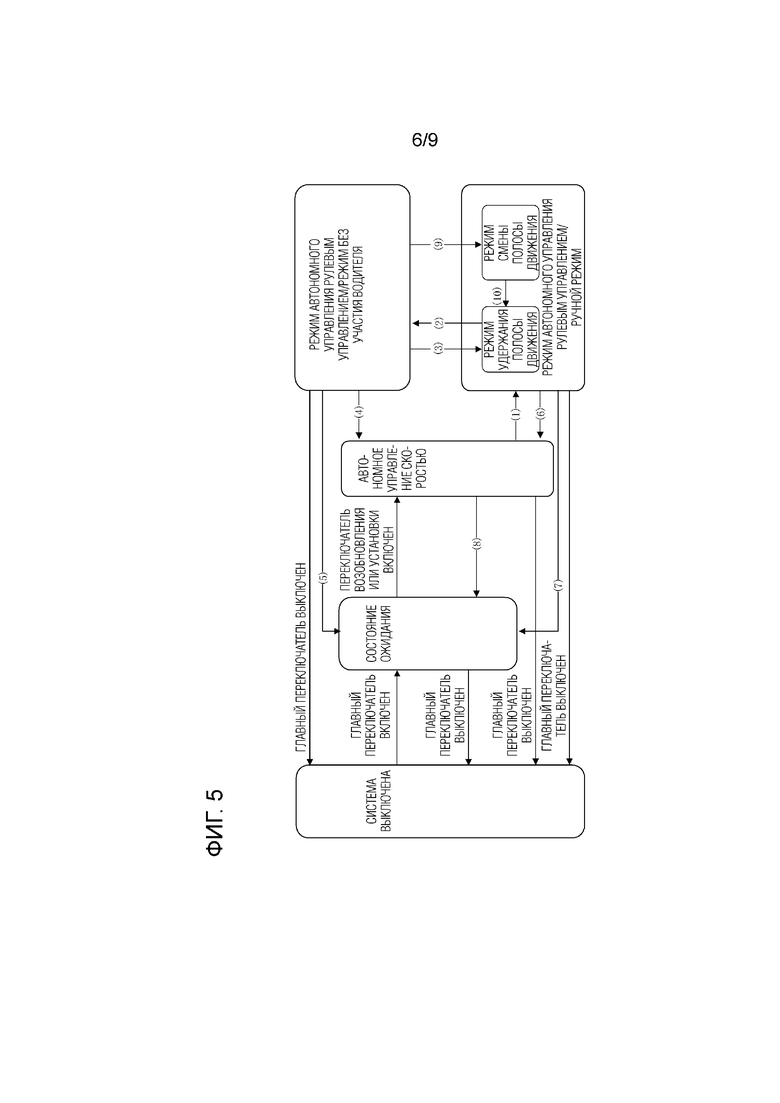
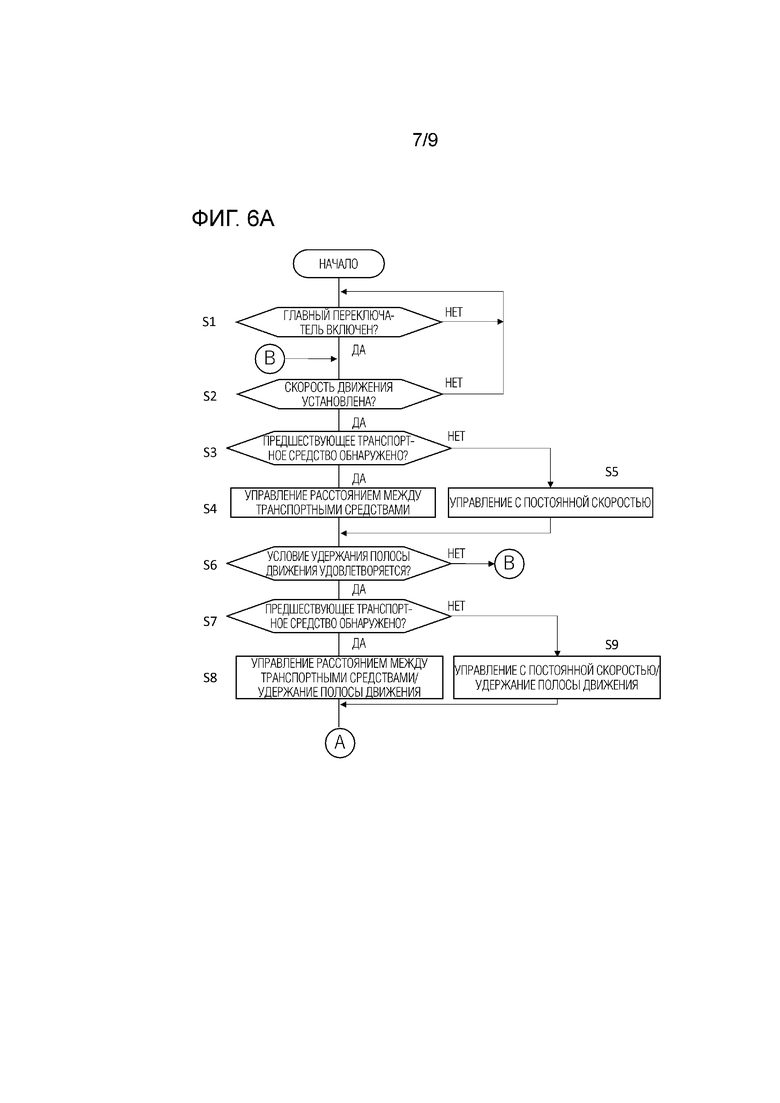
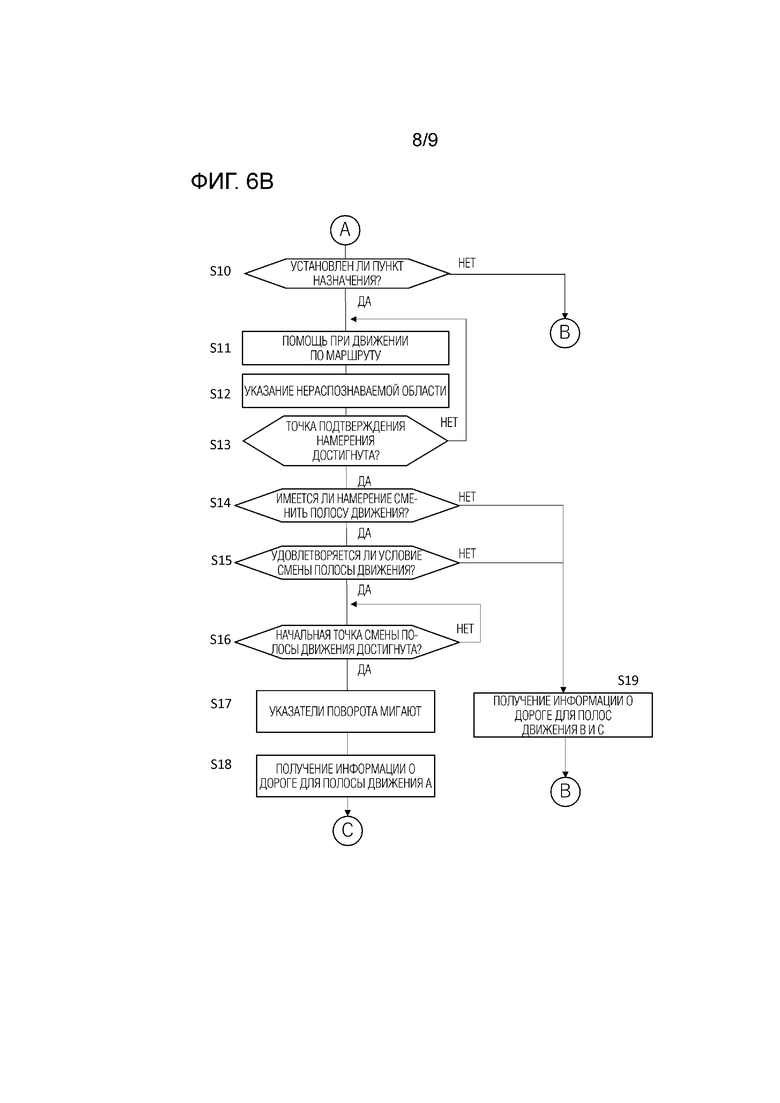
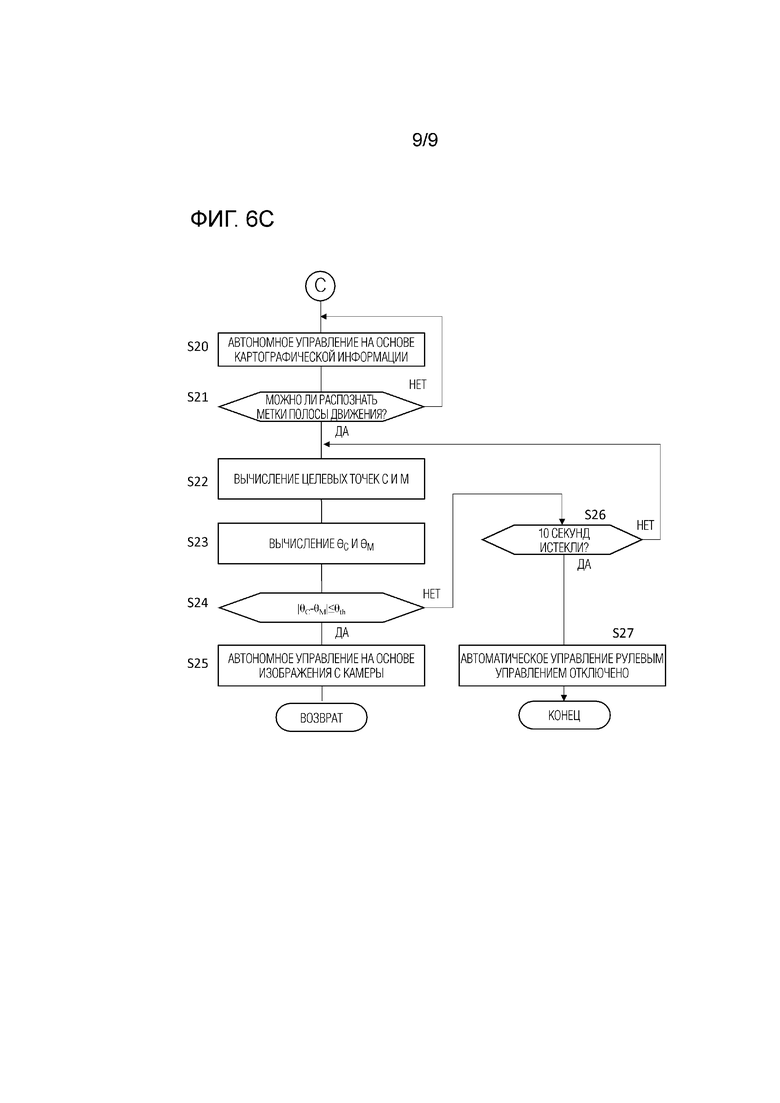
Группа изобретений относится к способу и устройству управления движением для управления движением транспортного средства с использованием процессора. Способ содержит: автономное управление транспортным средством, выполнение первого и второго автономных управлений. Автономное управление транспортным средством происходит посредством управления скоростью и рулевым управлением. Первое автономное управление происходит с использованием информации, распознанной из изображения, захваченного камерой, установленной на транспортном средстве. Второе автономное управление происходит с использованием картографической информации, хранящейся на носителе данных в транспортном средстве. Первое автономное управление выполняется, когда внешняя ситуация транспортного средства распознается из захваченного изображения. Когда на маршруте движения транспортного средства присутствует нераспознаваемая область, осуществляется переключение с первого автономного управления на второе автономное управление. Достигается повышение безопасности автономного управления. 2 н. и 3 з.п. ф-лы, 9 ил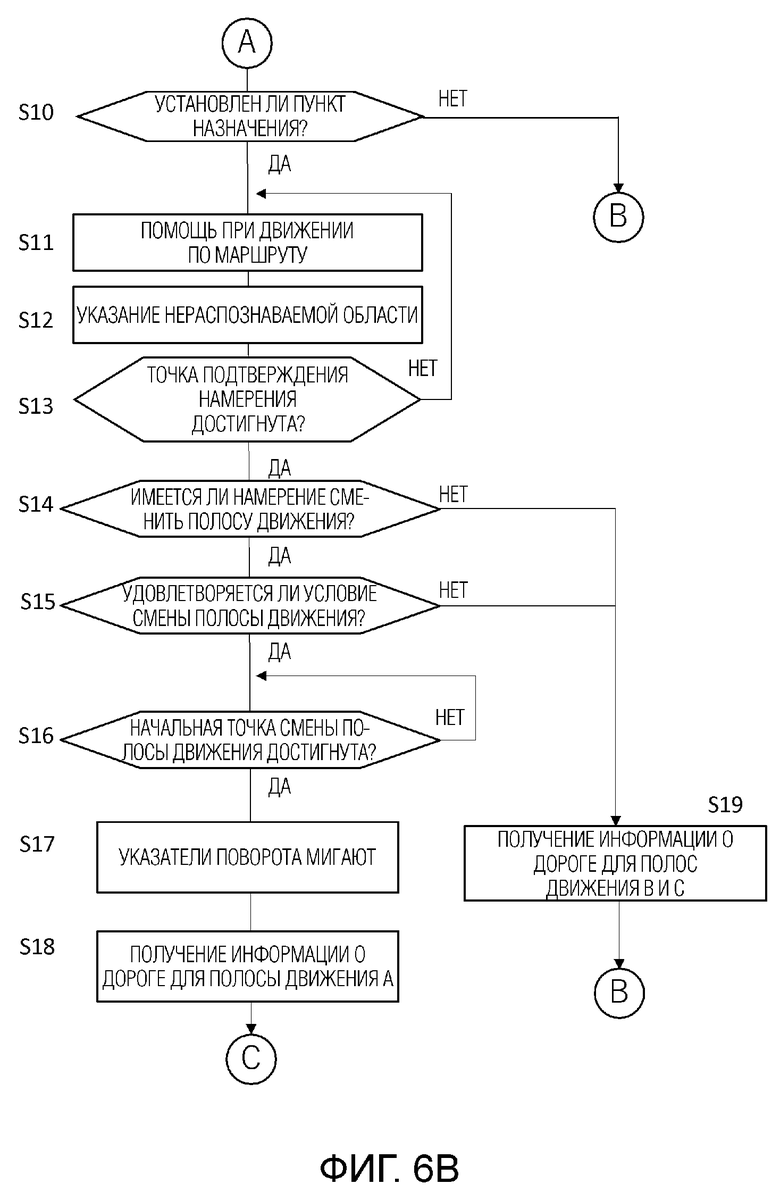
1. Способ управления движением для управления движением транспортного средства с использованием процессора, причем способ управления движением содержит:
автономное управление транспортным средством посредством использования функции автономного управления скоростью, для автономного управления скоростью движения транспортного средства, и функции автономного управления рулевым управлением, для автономного управления рулевым управлением транспортного средства;
выполнение первого автономного управления, при котором транспортное средство автономно управляется с использованием информации, распознанной из изображения, захваченного камерой, установленной на транспортном средстве;
выполнение второго автономного управления, при котором информация, указывающая внешнюю ситуацию транспортного средства, получается из картографической информации, хранящейся на носителе данных, предусмотренном в транспортном средстве, и транспортное средство управляется автономно с использованием полученной информации;
отличающийся тем, что
первое автономное управление выполняется, когда внешняя ситуация транспортного средства распознается из захваченного изображения, и указанием нераспознаваемой области, в которой внешняя ситуация транспортного средства не распознается из захваченного изображения; и
когда на маршруте движения транспортного средства присутствует нераспознаваемая область, осуществляется переключение с первого автономного управления на второе автономное управление в местоположении, в котором отклонение меньше заданной длины между центральной линией между правой и левой метками полосы движения, распознаваемыми из захваченного изображения, и центральной линией полосы движения, включенной в картографическую информацию, до того, как транспортное средство войдет в нераспознаваемую область.
2. Способ управления движением по п. 1, содержащий:
вычисление первой целевой точки, расположенной на целевой траектории транспортного средства, с использованием информации, распознанной из захваченного изображения;
выполнение первого автономного управления так, чтобы местоположение транспортного средства пересекало первую целевую точку;
вычисление второй целевой точки, расположенной на целевой траектории транспортного средства, с использованием информации, полученной из картографической информации;
выполнение второго автономного управления так, чтобы местоположение транспортного средства пересекало вторую целевую точку; и
когда разница между первой целевой точкой и второй целевой точкой составляет предварительно определенное значение или меньше после переключения с первого автономного управления на второе автономное управление, переключение со второго автономного управления на первое автономное управление.
3. Способ управления движением по п.1 или 2, содержащий:
вычисление первой целевой точки, расположенной на целевой траектории транспортного средства, с использованием информации, распознанной из захваченного изображения;
выполнение первого автономного управления так, чтобы местоположение транспортного средства пересекало первую целевую точку;
вычисление второй целевой точки, расположенной на целевой траектории транспортного средства, с использованием информации, полученной из картографической информации;
выполнение второго автономного управления так, чтобы местоположение транспортного средства пересекало вторую целевую точку; и
когда состояние, в котором разница между первой целевой точкой и второй целевой точкой больше заданного значения, продолжается в течение заданного времени или более после переключения с первого автономного управления на второе автономное управление, отключение функции автономного управления рулевым управлением.
4. Способ управления движением по п.1 или 2, содержащий:
вычисление первой целевой точки, расположенной на целевой траектории транспортного средства, с использованием информации, распознанной из захваченного изображения;
выполнение первого автономного управления так, чтобы местоположение транспортного средства пересекало первую целевую точку;
вычисление второй целевой точки, расположенной на целевой траектории транспортного средства, с использованием информации, полученной из картографической информации;
выполнение второго автономного управления так, чтобы местоположение транспортного средства пересекало вторую целевую точку; и
когда разница между первой целевой точкой и второй целевой точкой превышает предварительно определенное значение после переключения с первого автономного управления на второе автономное управление, продолжение второго автономного управления.
5. Устройство управления движением, содержащее:
носитель данных, сконфигурированный для хранения картографической информации; и
контроллер, сконфигурированный для управления движением транспортного средства, при этом контроллер функционирует для того, чтобы:
автономно управлять транспортным средством посредством использования функции автономного управления скоростью, для автономного управления скоростью движения транспортного средства, и функции автономного управления рулевым управлением, для автономного управления рулевым управлением транспортного средства;
выполнять первое автономное управление, при котором транспортное средство автономно управляется с использованием информации, распознанной из изображения, захваченного камерой, установленной на транспортном средстве;
выполнять второе автономное управление, при котором информация, указывающая внешнюю ситуацию транспортного средства, получается из картографической информации, хранящейся на носителе данных, предусмотренном в транспортном средстве, и транспортное средство управляется автономно с использованием полученной информации;
отличающееся тем, что
первое автономное управление выполняется, когда внешняя ситуация транспортного средства распознается из захваченного изображения, и
контроллер дополнительно функционирует для того, чтобы указывать нераспознаваемую область, в которой внешнюю ситуацию транспортного средства невозможно распознать из захваченного изображения; и
когда на маршруте движения транспортного средства присутствует нераспознаваемая область, переключаться с первого автономного управления на второе автономное управление, в местоположении, в котором отклонение меньше заданной длины между центральной линией между правой и левой метками полосы движения, распознаваемыми из захваченного изображения, и центральной линией полосы движения, включенной в картографическую информацию, прежде чем транспортное средство войдет в нераспознаваемую область.
| US 2018151066 A1, 31.05.2018 | |||
| WO 2014006759 A1, 09.01.2014 | |||
| JP 2018073010 A, 10.50.2018 | |||
| JP 2016207062 A, 08.12.2016 | |||
| JP 2010083312 A, 15.04.2010. |
