Изобретение относится к системе для переноса среды, имеющей не менее двух рабочих машин, каждая из которых имеет не менее одного несущего вала, на котором размещены транспортирующие элементы для транспортировки переносимой среды, и не менее одного привода, который приводит во вращение соответствующий несущий вал.
Рабочие машины, например вытеснительные насосы со множеством валов, как правило, приводят в движение с помощью одного привода, например гидравлического двигателя, двигателя внутреннего сгорания или электродвигателя, который соединен с ведомым валом рабочей машины либо непосредственно, либо посредством муфты и/или шестеренного привода. Вариант осуществления с электродвигателем в качестве привода, например, описан в документе DE 10 2008 018 407 A1.
Документ US 3 184 155 A относится к мотор-компрессорному агрегату с несколькими винтовыми насосами, расположенными последовательно для обеспечения очень высоких давлений на выходе. С выхода первого компрессора сжатый газ подается на вход последующего компрессора. Приводы приводятся в действие гидравлическими двигателями, которые устанавливаются в корпусах компрессоров. Гидравлические двигатели приводятся в действие с помощью насосов, и каждый двигатель приводится в действие отдельным насосом.
Документ US 2009/0047142 А1 относится к вакуумному насосному агрегату с основным и вспомогательным бустерным насосом, расположенным на вакуумной стороне основного насоса. Оба насоса последовательно соединены, при этом бустерный насос имеет более высокую скорость накачки, чем скорость накачки основного насоса. Каждый из основного и бустерного насоса содержит пару роторов насоса, корпус с входным и выходным отверстиями, а также пару магнитных роторов, вращающийся вместе с насосными роторами в корпусе. Каждый насос содержит собственный электродвигатель для приведения в действие насоса.
Документ US 2009/0304522 A1 относится к многоступенчатой компрессорной системе высокого давления, с несколькими компрессорами, установленными последовательно, причем каждый компрессор имеет свой собственный двигатель. Двигатели управляются с помощью общего механизма управления.
В случае рабочих машин со множеством валов, которые зависят от угла поворота и работают в соответствии с принципом прямого вытеснения, требуется распределение нагрузки между отдельными валами, вследствие чего внутри рабочей машины возникают дополнительные большие усилия и изгибающие моменты. Более того, также необходима синхронизация между валами, которая зависит от угла поворота.
Задачей настоящего изобретения является создание системы, которая позволяет повысить достижимое дифференциальное давление и обеспечить простую регулировку характеристик переноса при переносе многофазной смеси со сжимаемой и несжимаемой средой.
Эту задачу решают с помощью системы в соответствии с изобретением с характеристиками, указанными в основном пункте формулы изобретения. Преимущественные конфигурации и дополнительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения, в описании и на фигурах.
Система для переноса среды, имеющая не менее двух рабочих машин, каждая из которых имеет не менее одного несущего вала с размещенными на нем транспортирующими элементами для переноса среды, и не менее одного привода, который приводит во вращение соответствующие несущие валы, выполнена так, что множество рабочих машин соединены последовательно таким образом, что среду переносят в рабочую машину, размещенную далее по потоку, и таким образом, что каждой из рабочих машин назначен отдельный привод, а приводы соединены параллельно друг с другом и с общей системой энергоснабжения.
Технический результат, достигаемый с помощью настоящего изобретения, состоит в повышении общей пропускной способности при переносе и давления подачи, одновременно обеспечивая компактную конструкцию системы для переноса среды с простой регулировкой характеристик переноса при переносе многофазной смеси со сжимаемой и несжимаемой средой.
Система энергоснабжения может представлять собой локальную систему энергоснабжения, например децентрализованную электрогенераторную установку, насос, который подает гидравлическую текучую среду, или механическое приводное оборудование. Посредством последовательного соединения рабочих машин и подачи среды, выходящей из рабочей машины, в качестве среды, поступающей в следующую рабочую машину, размещенную далее по потоку, возможно повысить общую пропускную способность при переносе и давление подачи. Соединение рабочих машин, которые последовательно соединены с общей системой энергоснабжения, позволяет связать не только потоки текучей среды, но также и одновременно потоки энергии к отдельным приводам, причем благодаря параллельному соединению приводов относительно источника энергии нет необходимости в раздельном управлении. Система, состоящая из множества рабочих машин, автоматически подстраивается под соответствующие требования к переносу среды, поскольку соответствующие приводы соединены параллельно друг с другом и соединены с общей системой энергоснабжения. В зависимости от нагрузки на рабочую машину необходимое количество энергии подают на соответствующий привод из общего энергетического резерва системы энергоснабжения без необходимости в каком-либо дополнительном управлении. Рабочая машина и привод могут быть установлены в общий корпус, в результате чего система будет иметь модульную конструкцию. Каждой рабочей машине может быть назначен только один привод, так что могут быть обеспечены отдельные собранные модули с одной рабочей машиной и одним приводом. Можно соединять любое число рабочих машин и приводов друг с другом, что позволяет легко организовывать модульное производство, а также соответственно легко осуществлять размещение и соединение множества модулей друг с другом.
Для повышения производительности и упрощения установки возможно механическое соединение нескольких рабочих машин с образованием одного модуля, так чтобы обеспечить устойчивое соединение рабочих машин друг с другом, что, в частности, применимо при использовании системы для переноса углеводородов в буровых скважинах. Аналогичным образом, модули также могут быть механически соединены друг с другом, причем рабочие машины и/или модули, состоящие из соединенных рабочих машин, могут быть соединены непосредственно смежно друг с другом для получения компактной конструкции.
Посредством соединения рабочих машин в модули и объединения нескольких модулей друг с другом можно легко настраивать условия переноса. Если модули объединяют друг с другом и последовательно соединяют по текучей среде, все модули могут быть либо соединены параллельно относительно источника энергии приводов, либо каждый модуль, состоящий из нескольких рабочих машин, может отдельно снабжаться энергией, при этом приводы внутри модуля соединены параллельно друг другу относительно рассматриваемого источника энергии.
Дальнейшее развитие изобретения предполагает соединение двух рабочих машин друг с другом посредством соединительных элементов, которые соединяют выпускное отверстие одной рабочей машины с впускным отверстием рабочей машины, размещенной далее по потоку. Таким образом, в дополнение к механическому соединению рабочих машин посредством соединительного элемента одновременно реализуют протекание среды от выпускного отверстия одной рабочей машины, размещенной выше по потоку, к впускному отверстию другой рабочей машины, размещенной далее по потоку.
Рабочая машина может быть выполнена в виде насоса прямого вытеснения, в частности в виде насоса с винтовым шпинделем, который позволяет выполнять перенос даже многофазных смесей, которые имеют различные составы твердой фазы, жидкой фазы и газообразной фазы. Фазовые фракции могут изменяться в течение периода переноса таким образом, что в разные моменты времени наблюдаются разные соотношения твердой фазы, газовой фазы и жидкой фазы.
Привод соответствующих двигателей может быть выполнен в виде гидравлического двигателя или электродвигателя. В одной конфигурации привода в виде гидравлического двигателя предусмотрен один вариант осуществления изобретения, в котором двигатель представляет собой шестеренный двигатель или винтовой двигатель. Это по существу позволяет применять переносимую среду, возможно, после разделения разных фаз, также в качестве приводной среды.
Число ведомых валов привода может соответствовать числу несущих валов соответственно назначенной рабочей машины. Кроме того, число ведомых валов может быть целократным числу несущих валов. Если число ведомых валов привода соответствует числу несущих валов соответственно назначенной рабочей машины, каждый несущий вал по отдельности приводят в движение с помощью ведомого вала. Рабочая машина, как правило насос, содержит два или более несущих валов с размещенными на них транспортирующими элементами, такими как шестерни или винтовые шпиндели. Привод приводит несущие валы во вращение таким образом, что транспортирующие элементы транспортируют переносимую среду через корпус или камеру переноса от впускного отверстия к выпускному отверстию. Вместо применения одновального привода для приведения в движение многовальной рабочей машины посредством одной приводной втулки вместе с соответствующим соединительным элементом, например шестерней для синхронизации соответствующих несущих валов, привод реализуется с множеством ведомых валов, которые приводят в движение отдельные валы рабочей машины, жестко соединенные друг с другом под определенным углом. Таким образом, на каждом отдельном несущем валу равномерно создают пропорциональный приводной крутящий момент, что позволяет избежать создания приводного крутящего момента через ведомые валы на других ведомых валах. Это приводит к значительному уменьшению скручивающих моментов и изгибающих моментов в валах, в частности в том вале, посредством которого создают приводной крутящий момент. Если число ведомых валов привода соответствует числу несущих валов, создаваемые нагрузки значительно снижаются или равномерно распределяются по валам, благодаря чему значительно увеличивается ожидаемый срок службы рабочей машины. В свою очередь, могут быть соответственно уменьшены размеры валов, подшипников и уплотнений. Если соответствующим несущим валам, например двум или более, назначено целократное число ведомых валов, то индивидуальная нагрузка, передаваемая на несущий вал, снижается, поскольку нагрузки предпочтительно распределяются равномерно пропорционально окружности на несущем валу. Это приводит к дополнительному снижению пиковых нагрузок и, таким образом, увеличению срока службы рабочей машины.
Соответствующая рабочая машина может иметь множество несущих валов, а соответствующий привод может иметь множество ведомых валов, каждый из которых соединен с несущим валом. Благодаря однозначному назначению несущих валов ведомым валам может быть осуществлено точное соединение несущих валов друг с другом и ведомых валов с соответствующими несущими валами, что упрощает модульный монтаж множества рабочих машин друг с другом.
Предпочтительно рабочая машина имеет множество несущих валов, которые жестко соединены друг с другом под определенным углом, так что в одном варианте осуществления в виде шестеренного насоса или насоса с винтовым шпинделем могут быть реализованы блоки очень компактных рабочей и приводной машин, которые можно с успехом применять в условиях ограниченного пространства, например на нефтедобывающих и газодобывающих платформах. Ведомый вал может являться частью несущего вала или может быть жестко соединен с ним. В случае жесткого соединения ведомый вал и несущий вал могут быть разделены при выполнении работ по техническому обслуживанию и заменены по отдельности, например если несущий вал изношен сильнее из-за воздействия абразивной среды.
Привод и рабочая машина могут быть гидравлически отделены друг от друга таким образом, чтобы переносимая среда была отделена от привода. Таким образом, привод может быть выполнен независимо от переносимой среды. Если, например, используют отдельную гидравлическую текучую среду, гидравлическое разделение привода от рабочей машины позволяет предотвращать смешение соответствующих текучих сред. Также могут использоваться негидравлические приводы, которые благодаря гидравлическому разделению защищены от попадания текучей среды в привод.
Каждой рабочей машине может быть назначен байпасный трубопровод для обеспечения возможности обхода соответствующей рабочей машины в последовательном соединении. Байпасный трубопровод позволяет исключить соответствующую рабочую машину из линии переноса, чтобы в случае повреждения или износа можно было заменить рабочую машину без необходимости в прерывании процесса переноса среды с возможностью продолжения выполнения процесса со сниженной производительностью. В зависимости от конструкции системы также вероятно, что независимо от обхода и сбоя одной рабочей машины выполнение процесса переноса среды может продолжаться без какого-либо снижения производительности. Для этого преимуществом была бы избыточность системы с точки зрения необходимого числа соединенных последовательно рабочих машин, так чтобы можно было отключать одну или более рабочих машин для технического обслуживания или ремонта. Кроме того, байпас позволяет обеспечить наличие запасных рабочих машин, которые обычно не задействуют, а используют только для выполнения задачи по переносу среды вместо другой машины, которая вышла из строя. Более того, возможность открытия и закрытия байпасных трубопроводов позволяет реагировать на изменение рабочих условий таким образом, что отдельные рабочие машины могут добавляться или выключаться в зависимости от существующих требований, что позволяет возобновлять перенос среды или соответственно повышать или понижать давление.
Подводящие трубопроводы для приводов могут быть встроены в соответствующие корпуса приводов, так чтобы избежать необходимости в прокладке отдельных трубопроводов или трубопроводов за пределами корпусов приводов.
Один вариант осуществления изобретения описан ниже со ссылкой на приложенные фигуры. На фигурах изображено следующее:
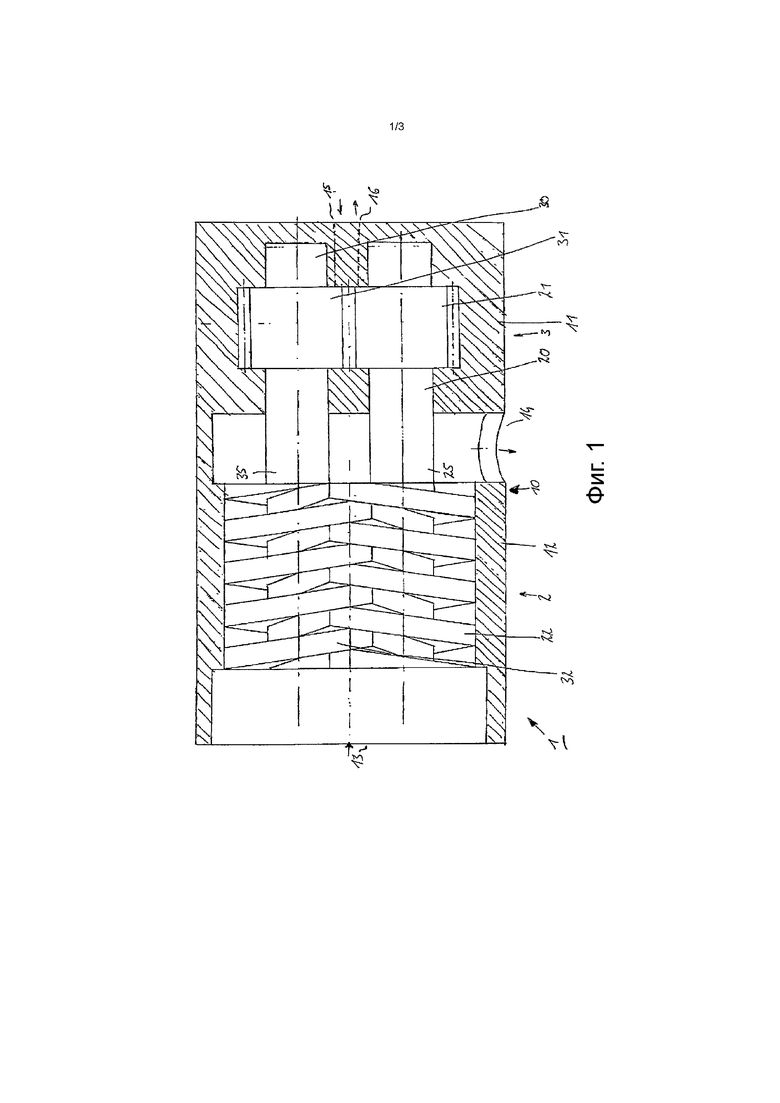
на Фиг. 1 приведен схематический вид в разрезе рабочей машины с приводом;
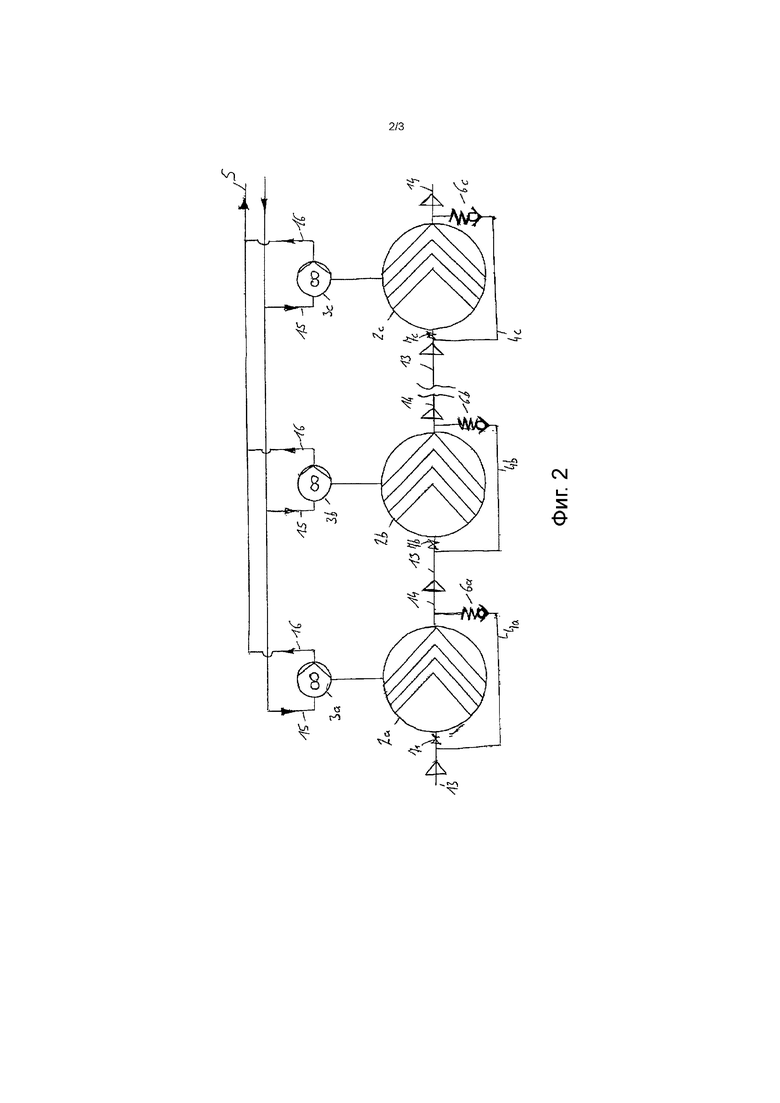
на Фиг. 2 приведено схематическое изображение присоединения приводов;
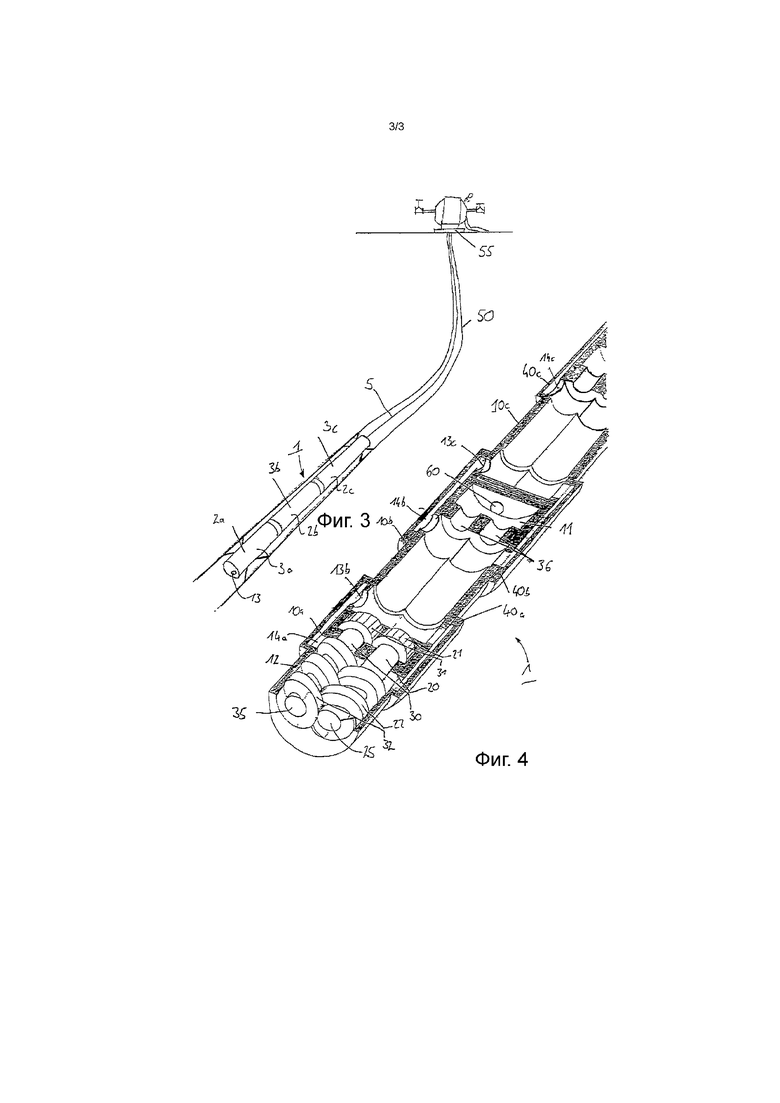
на Фиг. 3 приведено схематическое изображение примера применения; и
на Фиг. 4 приведен детальный вид в разрезе конструкции по Фиг. 3.
На виде в разрезе на Фиг. 1 показана одна часть системы 1 с корпусом 10, в котором размещены рабочая машина 2 и привод 3. Рабочая машина 2 выполнена в виде насоса с винтовым шпинделем с двумя шпинделями и расположена в секции 12 корпуса рабочей машины корпуса 10. Привод 3 расположен в секции 11 корпуса привода корпуса 10 и в показанном примере осуществления выполнен в виде двухвального шестеренного гидравлического двигателя.
В корпусе 10 предусмотрено впускное отверстие 13 для переносимой среды, через которое переносимая среда, например углеводороды при извлечении нефти или газа, могут попадать в рабочую машину 2. Из впускного отверстия 13 переносимую среду транспортируют посредством транспортирующих элементов 22, 32 в форме червячных винтов через рабочую машину 2 к выпускному отверстию 14.
Транспортирующие элементы 22, 32 установлены на несущих валах 25, 35 или выполнены в виде их части и переносят среду от впускного отверстия 13 до выпускного отверстия 14. Несущие валы 25, 35 проникают в область впуска позади впускного отверстия 13 и проходят в корпус 11 привода таким образом, что они могут быть соединены с ведомыми валами привода 3 с высокой жесткостью при кручении.
Привод 3 размещен в секции 11 корпуса привода в виде шестеренного гидравлического двигателя, в который под давлением подают гидравлическую текучую среду через впускной канал 15. Через впускной канал 15 гидравлическую текучую среду подают к паре шестерен, находящихся в зацеплении, а именно к шестерням 21 и 31. Шестерни 21, 31 неподвижно закреплены на ведомых валах 20 и 30 привода 3, например посажены или жестко установлены, например посредством параллельного ключа или системы зубчатого зацепления. Гидравлическая текучая среда, которую подают через впускной канал 15 к приводу 3, приводит во вращение шестерни 21, 31 и, таким образом, ведомые валы 20, 30. Гидравлическую текучую среду с пониженным давлением отводят через выпускной канал 16.
Вместо показанной конструкции, содержащей шестеренный двигатель, привод 3 также может быть выполнен в виде винтового двигателя, в котором зацепление приводных компонентов осуществляют посредством винтовых шпинделей вместо зубьев шестерни. В показанном варианте осуществления впускной канал 15 размещен на передней стороне системы 1 и позволяет гидравлической текучей среде протекать по существу параллельно оси вращения ведомых валов 20, 30. Удаление гидравлической текучей среды через выпускной канал 16 происходит аналогично на передней стороне в противоположном направлении, т. е. также соосно с осью вращения ведомых валов 20, 30. Таким образом, получают компактную конфигурацию с удобной подачей и удобным удалением гидравлической текучей среды с одной стороны в буровой скважине, буровых трубах или в транспортирующем трубопроводе.
В варианте осуществления, показанном для примера, ведомые валы 20, 30 выполнены в виде единого целого с несущими валами 25, 35 таким образом, что энергия, подаваемая гидравлическим двигателем, непосредственно передается ведомыми валами 20, 30 привода 3 на несущие валы 25, 35 рабочей машины 2. Кроме того, в качестве альтернативы цельной конструкции ведомых валов и несущих валов 20, 30, 25, 35 ведомые валы 20, 30 могут быть присоединены посредством соединительного устройства, такого как резьбовой фланец, соединительная втулка или другое жесткое соединение. Также можно соединить ведомые валы 20, 30 с несущими валами 25, 35 таким образом, чтобы поддерживать взаимное угловое положение валов 20, 25, 30, 35, например, посредством зацепления с помощью шестеренного привода.
Вместо цельной конструкции корпуса 10, в которой корпус рабочей машины и корпус привода объединены, а общий корпус разделен для обеспечения установки устройства, также возможна конструкция, состоящая из множества частей, которая, в частности, предполагает раздельное изготовление корпуса 12 рабочей машины и корпуса 11 привода и их скрепление друг с другом.
Может быть предусмотрена возможность гидравлического разделения привода 3 и рабочей машины 2 таким образом, чтобы исключить попадание переносимой среды на привод 3 из рабочей машины 2 для предотвращения загрязнения и соответствующего более интенсивного износа привода. С этой целью отверстие для ведомых валов 20, 30 в области впуска или области всасывания рабочей машины 2 герметизируют, например, посредством лабиринтных уплотнений или уплотнений вала. Однако, если устройство 1 предназначено для использования в нефтяной промышленности, может быть предпочтительно, чтобы гидравлическая текучая среда была совместима с переносимой текучей средой, например чтобы она представляла собой соответствующим образом переработанную нефть, поскольку в этом случае возможная утечка в уплотнении не приведет к загрязнению переносимой среды.
Размещение привода 3 и рабочей машины 2 в одном корпусе 10 позволяет получить компактную, и в частности цилиндрическую, конструкцию. Возможно размещать множество систем 1 в ряд, одну позади другой, и механически соединять их с образованием единого модуля. Такое последовательное размещение систем 1 имеет преимущество, которое заключается в том, что среда, переносимая из рабочей машины 2 через выпускное отверстие 14, может транспортироваться через соединительный канал к впускному отверстию 13 следующей системы.
Таким образом, гидравлическая текучая среда, используемая для приведения в движение привода 3, может переноситься через корпус системы 1.
Кроме того, в другом варианте осуществления показанного примера также возможно, чтобы две рабочие машины 2 были соединены с одним приводом 3 таким образом, что ведомые валы 20, 30 привода 3 выступают из корпуса 11 привода в обоих направлениях и размещены с обеих сторон шестерен 21, 31. Таким образом, конструкцию системы 1 возможно выполнить еще более компактной. Обе рабочие машины 2, соединенные с таким приводом 3, могут транспортировать переносимую среду в одном и том же направлении. Альтернативно с помощью такого привода можно реализовать перенос среды в противоположных направлениях транспортировки.
Несущие валы 25, 35 транспортирующих элементов 22, 32 или винтовых транспортеров жестко соединены друг с другом под определенным углом, благодаря чему обеспечивается зацепление шестерен 21, 31 привода 3 вследствие соединения между ведомыми валами 20, 30 и несущими валами 25, 35 с высокой жесткостью при кручении. Дополнительная синхронизация несущих валов 25, 35 не требуется и нет необходимости в передаче моментов через один из несущих валов, в результате чего достигается значительное снижение нагрузки, создаваемой скручивающими моментами и изгибающими моментами внутри валов. Чтобы достичь более точных характеристик синхронизации и синхронности несущих валов 25, 35 и, таким образом, транспортирующих элементов 22, 32, возможно и предполагается разместить одну или более находящихся в зацеплении пар шестерен на несущих валах 25, 35 в дополнение к шестерням 21, 31 привода 3 для обеспечения синхронности. Однако эти синхронизирующие шестерни не создают движущую силу, а лишь обеспечивают более точную синхронизацию. В идеальном случае на оба несущих вала 25, 35 равномерно передается движущая сила привода 3, что обусловлено прямым зацеплением между ведомыми валами 20, 30 и несущими валами 25, 35, благодаря чему каждый несущий вал 25, 35 приводится в движение по отдельности. Посредством отдельного соединения несущего вала 25, 35 с ведомым валом 20, 30 привода 3 происходит автоматическое распределение нагрузки на отдельные валы многовальной рабочей машины 2 с зависимым угловым положением несущих валов 25, 35, в результате чего в преимущественной конструкции рабочая машина 2 работает в соответствии с принципом прямого вытеснения. Происходит автоматическая синхронизация всех валов друг с другом. Посредством сведения к минимуму дополнительных нагрузок, таких как, например, изгибающие моменты, обусловленные возникновением усилий в зубьях шестерни или кручением вследствие передачи приводных крутящих моментов от одного вала к следующему, происходит уменьшение изгибания валов, что позволяет повысить эффективность за счет уменьшения внутренних допусков для транспортирующих элементов.
На Фиг. 2 представлено схематическое изображение приводов, соединенных параллельно, и рабочих машин, соединенных последовательно. На Фиг. 2 представлены три рабочие машины 2а, 2b, 2с в виде насосов с винтовыми шпинделями, которые размещены линейно друг позади друга и соединены последовательно. Среду, такую как, например, смесь углеводородов из буровой скважины, подают в рабочую машину 2а, которая находится слева на Фиг. 2, через впускное отверстие 13. Смесь углеводородов, как правило, представляет собой многофазную смесь, содержащую жидкую часть, твердую часть, а также газообразную часть. Среду подают через рабочую машину 2а к выпускному отверстию 14 рабочей машины 2а и оттуда к впускному отверстию 13 следующей рабочей машины 2b, которая размещена далее по потоку. Из второй рабочей машины 2b вероятно сжатую и находящуюся под более высоким давлением среду подают через выпускное отверстие 14 к впускному отверстию 13 третьей рабочей машины 2с, которая, опять же, размещена еще далее по потоку, из которой среду транспортируют через выпускное отверстие 14 к так называемому устью буровой скважины для удаления. Каждая рабочая машина 2а, 2b, 2с оснащена байпасным трубопроводом 4а, 4b, 4с, через который можно подавать среду от впускного отверстия 13 или даже из места, расположенного до впускного отверстия 13, к выпускному отверстию 14 позади рабочей машины 2а, 2b, 2с, таким образом обходя соответствующую рабочую машину 2а, 2b, 2с. Каждый байпасный трубопровод 4a, 4b, 4c оснащен одноходовым клапаном 6а, 6b, 6с для предотвращения протекания среды обратно от выпускного отверстия 14 к впускному отверстию 13. Одноходовой клапан 6a, 6b, 6c может быть выполнен переключаемым, в частности в виде подпружиненного переключаемого клапана, для обеспечения полного открывания байпасного трубопровода 4а, 4b, 4с. Кроме того, каждой рабочей машине 2а, 2b, 2с может быть также назначен запорный клапан 7а, 7b, 7с для обеспечения полного блокирования канала через рабочую машину 2а, 2b, 2с. Это позволяет исключить всю рабочую машину 2а из общего потока переноса среды, например, для выполнения работ по техническому обслуживанию или для регулирования объема добычи или пропускной способности при переносе.
Вследствие того, что байпасный трубопровод оснащен одноходовым клапаном 6a, 6b, 6c, в случае блокирования происходит автоматическое исключение неисправного транспортирующего блока из процесса переноса без прерывания его работы.
Более того, на Фиг. 2 показано, что каждой рабочей машине 2а, 2b, 2с назначен отдельный привод 3а, 3b, 3с. В приведенном первоначальном примере привод выполнен в виде гидравлического двигателя. Энергию на все приводы 3a, 3b, 3c подают от общей системы 5 энергоснабжения с подводящим трубопроводом 15 и возвратным трубопроводом 16. Оба из подводящего трубопровода 15 и возвратного трубопровода 16 показаны на Фиг. 1, а общее энергоснабжение и параллельное соединение подвода энергии схематически показаны на Фиг. 2. Соответствующие приводы 3a, 3b, 3c относительно системы энергоснабжения соединены друг с другом последовательно, так чтобы подавать гидравлический приводящий поток с жестко установленными параметрами от системы энергоснабжения на каждый привод 3a, 3b, 3c, каждый из которых выполнен, например, в виде шестеренного двигателя. В отличие от параллельного соединения рабочих машин, при котором нагрузка распределяется автоматически в зависимости от размера отдельной рабочей машины, последовательное соединение множества рабочих машин 2a, 2b, 2c реализовать гораздо сложнее. В случае независящих от угла или гидродинамических машин, таких как, например, центробежные насосы, на практике такое соединение экономично реализуют посредством применения общего привода. В одновальных или многовальных рабочих машинах изобретения, которые работают в соответствии с принципом прямого вытеснения, распределение нагрузки на последовательно соединенные задействованные блоки является гораздо более сложной задачей. Это относится, в частности, к случаям, когда переносимая и находящаяся под давлением в технологическом объемном потоке среда содержит сжимаемые части. Наличие сжимаемых частей обуславливает постепенное возникновение перепада давления в отдельных блоках и приводит к изменению, в случае более высокого давления - снижению, объема переносимой среды. При постоянных условиях переноса это может быть учтено при конфигурировании характеристик переноса соответствующего следующего блока. Однако в реальных рабочих условиях процесс переноса среды редко является постоянным, так что такая жестко сконфигурированная система не сможет реагировать на изменения, поэтому необходимо контролировать промежуточные значения давления и быстро соответствующим образом корректировать характеристики переноса для следующего блока, например, посредством регулирования скорости вращения. Поскольку изменения условий переноса происходят очень быстро, требования к динамике регулировки характеристик переноса последующих блоков чрезвычайно высоки. Однако в соответствии с изобретением три насосных блока, которые показаны в качестве примера, с отдельными шестеренными гидравлическими двигателями 3а, 3b, 3с соединены параллельно с общей системой 5 энергоснабжения, которая подает приводящий поток с жестко установленными параметрами для приведения в движение гидравлических двигателей 3а, 3b, 3с. При изменении рабочих условий может оказаться, что один отдельный блок будет подвержен воздействию более высокой нагрузки, чем следующий блок, вследствие, например, наличия переносимых сжимаемых частей, так что требуемый для него приводной крутящий момент будет расти, что, в свою очередь, приведет к снижению скорости. Таким образом, гидравлический привод будет переносить меньший объем среды. Вследствие этого автоматически увеличится подача на гидравлические приводы соседних блоков. В этом случае происходит регулирование их относительной скорости в соответствии с новыми условиями, что, в свою очередь, приводит к разгрузке блока, который ранее был нагружен сильнее. Это же относится к ситуации, если, например, оказывается, что один из блоков изношен сильнее. В таком случае блоки, которые размещены до и после него, принимают часть нагрузки в пределах их соответствующих рабочих диапазонов.
На Фиг. 3 представлено схематическое изображение варианта применения системы в буровой скважине 50, также называемой обсадной колонной. Так называемое устье 55 буровой скважины размещено на верхнем конце буровой скважины 50. Переносимую среду удаляют из первого. Внутри буровой скважины 50 предусмотрен источник 5 энергии, а также возвратный трубопровод для переносимой технологической среды. Источник 5 энергии может представлять собой источник электрической энергии или может быть выполнен в виде гидравлического привода для реализации подачи энергии посредством системы гидравлического давления, которая встроена в устье 55 скважины. С помощью нагнетательного трубопровода 15 и возвратного трубопровода 16 можно легко управлять соответствующими приводами 3a, 3b, 3c, которые выполнены в виде гидравлических двигателей.
На нижнем конце буровой скважины 50 показана система 1 с тремя модулями. Каждый модуль состоит из одной рабочей машины 2а, 2b, 2с и одного привода 3а, 3b, 3с. Отдельные части системы механически соединены друг с другом и размещены одна позади другой в направлении потока, так что среда переносится из буровой скважины 50 через впускное отверстие 13 передней рабочей машины 2а с последующим протеканием через обе последующие рабочие машины 2b и 2c. Все три рабочие машины 2а, 2b, 2с жестко механически связаны друг с другом и непосредственно присоединены друг к другу, так что система 1 по существу представляет собой соединенный трубчатый модуль. Собранный модуль может быть целиком опущен в буровую скважину 50 в соответственно назначенное положение. Систему 1 располагают и закрепляют внутри буровой скважины 50 посредством боковых направляющих.
На Фиг. 4 показан вид в разрезе переднего конца системы 1. На Фиг. 4 на переднем конце системы 1 первая рабочая машина 2а изображена в соответствии с вариантом осуществления рабочей машины 2а, показанным на Фиг. 1, с передним впускным отверстием 13, несущими валами 35, 25 и транспортирующими элементами 22, 32, выполненными в виде червячных винтов. Червячные винты 22, 32 установлены в корпус 12 и транспортируют переносимую среду через выпускное отверстие 14а к впускному отверстию 13b следующей второй рабочей машины 2b, размещенной далее по потоку, только корпус 10b которой изображен без приводов и транспортирующих элементов. Из выпускного отверстия 14а среду транспортируют вдоль наружной поверхности корпуса 10а через кольцевой зазор, который образован соединительным элементом 40а, размещенным снаружи, к впускному отверстию 13b. Соединительный элемент 40а соединяет рабочую машину 2а со второй рабочей машиной 2b гидравлически, а также механически. В качестве альтернативы переносу потока среды вдоль наружной стороны может быть предусмотрен выпускной канал и соответствующий впускной канал внутри корпуса, так чтобы получить прямой сглаженный наружный контур соединенных друг с другом рабочих машин 2а, 2b, 2с со встроенными приводами 3a, 3b, 3c.
Из второй рабочей машины 2b переносимая среда протекает через второе выпускное отверстие 14b к впускному отверстию 13с третьей рабочей машины 2с. Эти две рабочие машины 2b, 2c также механически и гидравлически соединены друг с другом посредством соединительного элемента 40b. Важно отметить, что гидравлические приводы в корпусах 11 приводов с шестернями 21, 22 гидравлически разделены от переносимой среды. Подачу гидравлической текучей среды в гидравлические двигатели 3a, 3b, 3c осуществляют посредством подводящего трубопровода 60, который размещен на передних сторонах соответствующих частей системы или частей модуля. В случае если приводы 3 выполнены в виде гидравлических двигателей, подающий трубопровод с впускным каналом 15, а также возвратный трубопровод с выпускным каналом 16 размещены или выполнены внутри подводящего трубопровода 60. В случае конфигурации с электродвигателями кабели размещены внутри подводящего трубопровода 60, который может быть выполнен в виде прямого канала. В случае корпуса с цилиндрической конструкцией в конфигурации рабочих машин в виде насосов с винтовыми шпинделями может быть предусмотрен подводящий трубопровод 60 или множество подводящих трубопроводов 60 в области, размещенные рядом с винтовыми шпинделями, справа и слева от плоскости, в которой находятся оси несущих валов 25, 35.
Через подводящий трубопровод 60 или канал подачи, которые могут быть размещены с обеих сторон от плоскости, образованной осями несущих валов 25, 35, приводы 3а, 3b, 3с могут быть соединены параллельно друг другу относительно системы 5 энергоснабжения, так чтобы можно было реализовать общую систему самосинхронизации, которая состоит из соединенных параллельно приводов 3а, 3b, 3с и рабочих машин 2а, 2b, 2с, выполненных в виде соединенных последовательно насосов с винтовыми шпинделями. Даже в случае вариантов осуществления со множеством валов также возможно обеспечить очень компактные, удлиненные и механически устойчивые системы 1, которые могут с большим преимуществом использоваться на нефтедобывающих и газодобывающих платформах в условиях ограниченного пространства. Благодаря последовательному соединению насосов и параллельному соединению приводов достигается эффект самосинхронизации приводов даже в изменяющихся условиях переноса среды. Нарушающие работу факторы, влияющие на выполнение многоступенчатого способа переноса среды, которые возникают из-за состава и сжимаемости текучей среды, по большей части устранены, или по меньшей мере их поддерживают в контролируемых пределах.
Изобретение относится к системе для переноса среды. Система имеет не менее двух рабочих машин (2a, 2b, 2c), каждая из которых имеет не менее одного несущего вала с размещенными на нем транспортирующими элементами для подлежащей переносу среды, и не менее одного привода (3a, 3b, 3c), который приводит во вращение соответствующий несущий вал. Множество машин (2a, 2b, 2c) соединены последовательно таким образом, что среду переносят в машину (2a, 2b, 2c), размещенную далее по потоку, и таким образом, что каждой из машин (2a, 2b, 2c) назначен отдельный привод (3a, 3b, 3c). Приводы (3a, 3b, 3c) соединены параллельно друг с другом и с общей системой энергоснабжения. Привод (3a, 3b, 3c) выполнен в виде гидравлического двигателя. Общая система энергоснабжения выполнена в виде гидравлической системы энергоснабжения. Изобретение направлено на повышение общей пропускной способности при переносе среды и давления подачи, одновременно обеспечивая компактную конструкцию системы с простой регулировкой характеристик переноса многофазной смеси со сжимаемой и несжимаемой средой. 12 з.п. ф-лы, 4 ил.
.
1. Система для переноса среды, имеющая не менее двух рабочих машин (2, 2a, 2b, 2c), каждая из которых имеет не менее одного несущего вала (25, 35) с размещенными на нем транспортирующими элементами (22, 32) для подлежащей переносу среды, и не менее одного привода (3, 3a, 3b, 3c), который приводит во вращение соответствующий несущий вал (25, 35), отличающаяся тем, что множество рабочих машин (2, 2a, 2b, 2c) соединены последовательно таким образом, что среду переносят в рабочую машину (2, 2a, 2b, 2c), размещенную далее по потоку, и таким образом, что каждой из рабочих машин (2, 2a, 2b, 2c) назначен отдельный привод (3, 3a, 3b, 3c), и приводы (3, 3a, 3b, 3c) соединены параллельно друг с другом и соединены с общей системой (5) энергоснабжения, причем привод (3, 3a, 3b, 3c) выполнен в виде гидравлического двигателя и общая система (5) энергоснабжения выполнена в виде гидравлической системы энергоснабжения.
2. Система по п. 1, отличающаяся тем, что рабочая машина (2, 2a, 2b, 2c) и назначенный привод (3, 3a, 3b, 3c) установлены в общий корпус (10, 10a, 10b, 10c).
3. Система по п. 1 или 2, отличающаяся тем, что множество рабочих машин (2a, 2b, 2c) механически соединены друг с другом с образованием модуля.
4. Система по п. 3, отличающаяся тем, что две рабочие машины (2a, 2b, 2c) соединены друг с другом посредством соединительных элементов (40a, 40b, 40c), которые соединяют выпускное отверстие (14) одной рабочей машины (2a, 2b) с впускным отверстием (13) рабочей машины (2b, 2c), размещенной далее по потоку.
5. Система по одному из предшествующих пунктов, отличающаяся тем, что рабочая машина (2, 2a, 2b, 2c) выполнена в виде насоса прямого вытеснения, в частности в виде насоса с винтовым шпинделем.
6. Система по п. 1, отличающаяся тем, что гидравлический двигатель (3, 3a, 3b, 3c) выполнен в виде шестеренного двигателя или винтового двигателя.
7. Система по одному из предшествующих пунктов, отличающаяся тем, что число ведомых валов (20, 30) привода (3, 3a, 3b, 3c) соответствует числу несущих валов (25, 35) соответственно назначенной рабочей машины (3, 2a, 2b, 2c) или равно их целократному числу.
8. Система по одному из предшествующих пунктов, отличающаяся тем, что соответствующая рабочая машина (2a, 2b, 2c) имеет множество несущих валов (25, 35), а соответствующий привод (3a, 3b, 3c) имеет множество ведомых валов (20, 30), каждый из которых соединен с несущим валом (25, 35).
9. Система по одному из предшествующих пунктов, отличающаяся тем, что рабочая машина (2a, 2b, 2c) имеет множество несущих валов (25, 35), которые соединены друг с другом жестко и под определенным углом.
10. Система по одному из предшествующих пунктов, отличающаяся тем, что ведомый вал (20, 30) является частью несущего вала (25, 35) или соединен с ним с высокой жесткостью при кручении.
11. Система по одному из предшествующих пунктов, отличающаяся тем, что привод (3, 3a, 3b, 3c) и рабочая машина (2, 2a, 2b, 2c) гидравлически разделены друг от друга.
12. Система по одному из предшествующих пунктов, отличающаяся тем, что каждой рабочей машине (2a, 2b, 2c) назначен байпасный трубопровод (4a, 4b, 4c) для обеспечения возможности обхода соответствующей рабочей машины (2a, 2b, 2c) в последовательном соединении.
13. Система по одному из предшествующих пунктов, отличающаяся тем, что подводящий трубопровод (60) для приводов (3a, 3b, 3c) встроен в корпус соответствующего привода.
| US 3184155 A, 18.05.1965 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE 4121684 А1, 07.01.1993 | |||
| US 4068984 A, 17.01.1978 | |||
| US 5846062 A, 08.12.1998 | |||
| US 5263832 A, 23.11.1993 | |||
| ПОДВОДНЫЙ ДОБЫЧНОЙ АГРЕГАТ | 2009 |
|
RU2498113C2 |
| Механизированные захваты для выемки слитков из изложниц, их транспортировки и укладки | 1953 |
|
SU98497A1 |

