Область изобретения
Настоящее изобретение, в целом, относится к способам выявления потери связи в информационной сети транспортного средства.
Уровень техники/Раскрытие изобретения
Системы транспортных средств могут содержать множество модулей управления транспортным средством, получающих информацию от электронных чувствительных устройств транспортного средства и передающих управляющую информацию исполнительным устройствам. Кроме того, системы транспортных средств может содержать информационные сети транспортного средства для обеспечения связи и обмена данными между модулями управления транспортного средства, и между модулями управления транспортного средства и связанными с ними датчиками и исполнительными устройствами.
Одним из примеров информационной сети транспортного средства является локальная сеть контроллера (ЛСК), представляющая собой систему общей последовательной шины, соединяющей различные модули управления транспортного средства. В случае потери связи между модулями может быть недоступна информация для организации доступа к общей шине и для обеспечения работы транспортного средства. Поэтому системы транспортных средств могут содержать бортовую диагностическую систему (БДС) для отслеживания работы транспортного средства, а также для контроля информационной сети транспортного средства и диагностики ошибок в сетевом соединении. При выявлении потери связи с модулем управления заранее определенной пороговой длительности (например, 5 секунд), система БДС может активировать диагностический код неисправности (ДКН), соответствующий природе обнаруженной неисправности.
Однако, авторы настоящего изобретения выявили возможные проблемы, связанные с таким подходом. Например, при использовании заранее определенного порогового значения длительности потеря связи в информационной сети может привести к неисправной работе транспортного средства (из-за потери информации для обеспечения работы транспортного средства) до активации ДКН, соответствующего потере связи. В результате транспортное средство может перейти в режим неисправности до установки ДКН потери связи. Следовательно, потеря связи не может быть обнаружена, что усложняет диагностику действительной причины неисправности транспортного средства и приводит к задержкам в устранении проблем. В качестве примера, в случае потери связи с электронным модулем топливного насоса (ЭМН) транспортное средство может заглохнуть из-за нехватки крутящего момента до того, как система БДС активирует ДКН потери связи с ЭМН (например, код U0109).
В одном из примеров некоторые из описанных выше недостатков могут быть устранены, по меньшей мере, частично с использованием способа для транспортного средства, который содержит: определение первого порогового значения времени для установки диагностического кода неисправности, соответствующего потере связи, на основе предположительной длительности до нарушения работы транспортного средства из-за потери связи с первым модулем, соединенным с информационной сетью транспортного средства, которая соединяет множество модулей управления транспортного средства.
Например, множество модулей управления, осуществляющих управление одной или несколькими функциями транспортного средства, для обмена данными и обеспечения связи могут быть соединены посредством одной или нескольких сетевых шин. Связь с модулями управления может контролироваться, и в случае выявления потери связи с модулем управления может быть определена предположительная длительность потери связи, которая приводит к неисправной работе транспортного средства. Кроме того, на основе предположительной длительности до неисправности может быть определено пороговое значение времени активации ДКН потери связи, с тем чтобы активировать ДКН потери связи до наступления неисправности транспортного средства, вызванной потерей связи.
Таким образом, посредством выбора порогового значения времени для установки ДКН потери связи на основе предположительной длительности до наступления неисправности транспортного средства, может быть реализовано интеллектуальное принятие решений об установке ДКН потери связи. В результате, неисправности потери связи могут быть выявлены до перехода транспортного средства в режим неисправности, что улучшает возможности диагностики потери связи и обеспечивает более быстрое устранение проблем.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
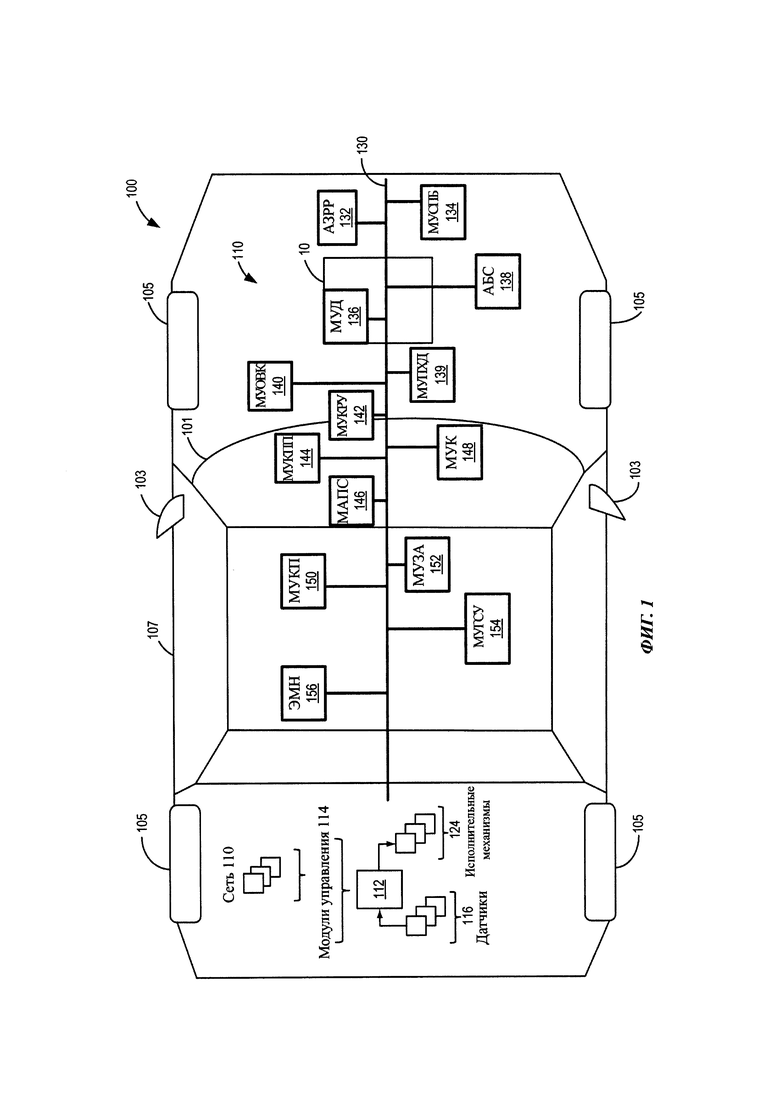
На фиг. 1 представлена блок-схема, иллюстрирующая архитектуру системы управления транспортного средства, содержащей один или несколько модулей, соединенных с сетевой шиной транспортного средства.
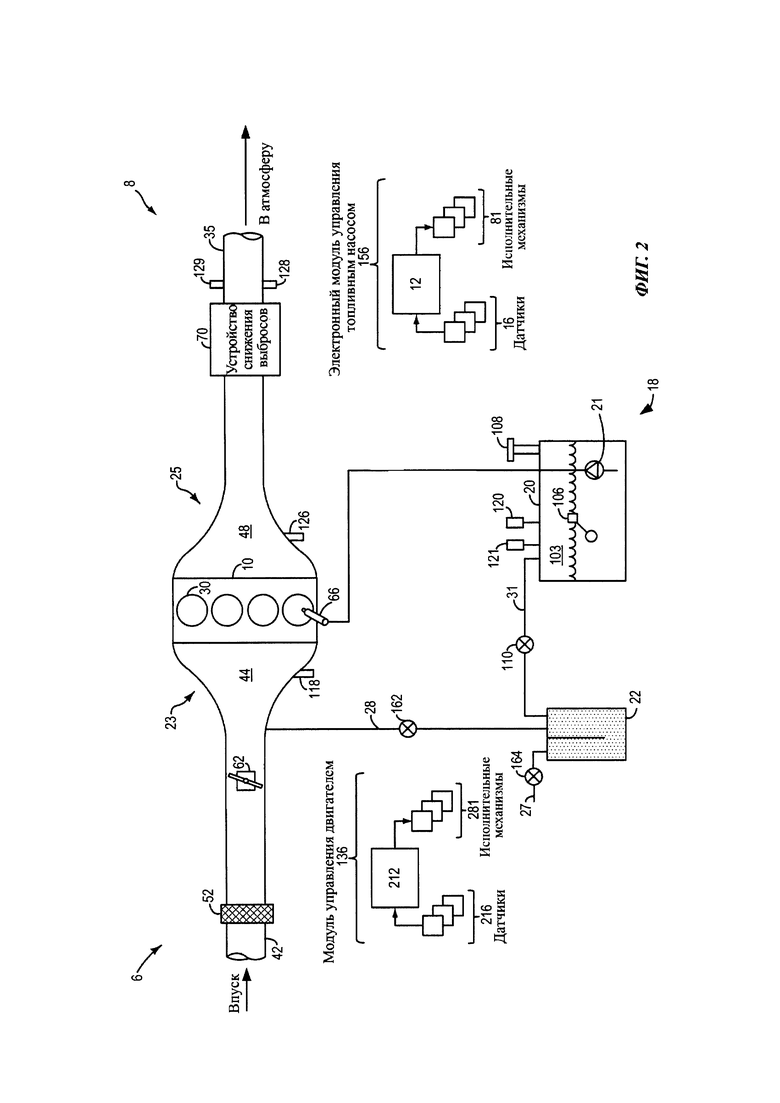
На фиг. 2 схематически представлена система двигателя, содержащая модуль управления двигателем и топливную систему, которая содержит электронный модуль управления топливным насосом, причем модуль управления двигателем (МУД) и ЭМН входят в состав системы управления транспортным средством, представленной на фиг. 1.
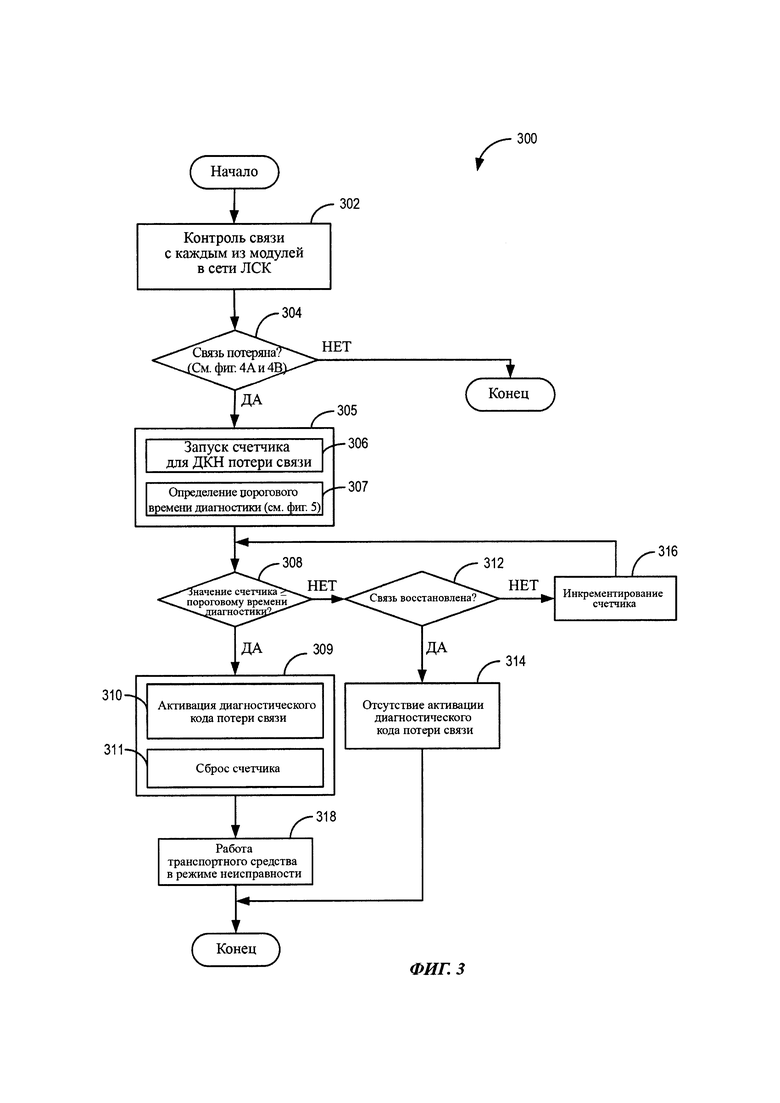
На фиг. 3 представлен высокоуровневый алгоритм, которым графически представлен пример способа установки диагностического кода потери связи.
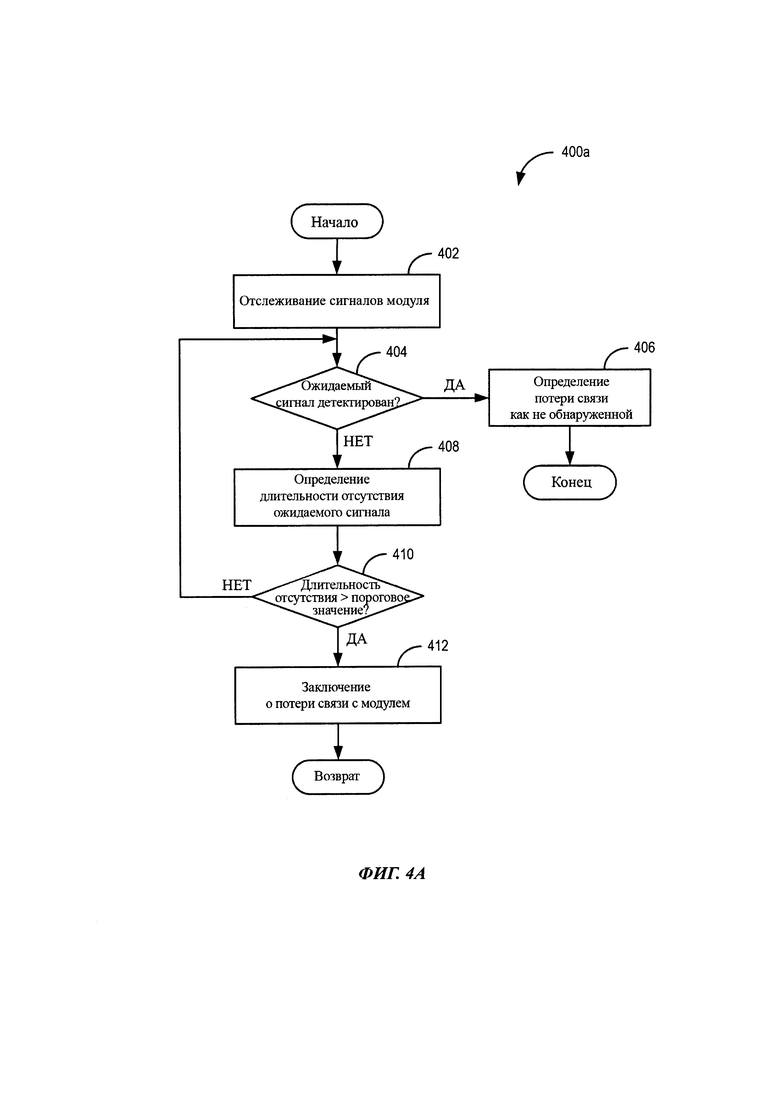
На фиг. 4А представлен высокоуровневый алгоритм, иллюстрирующий первый пример способа выявления потери связи с модулем системы управления транспортного средства.
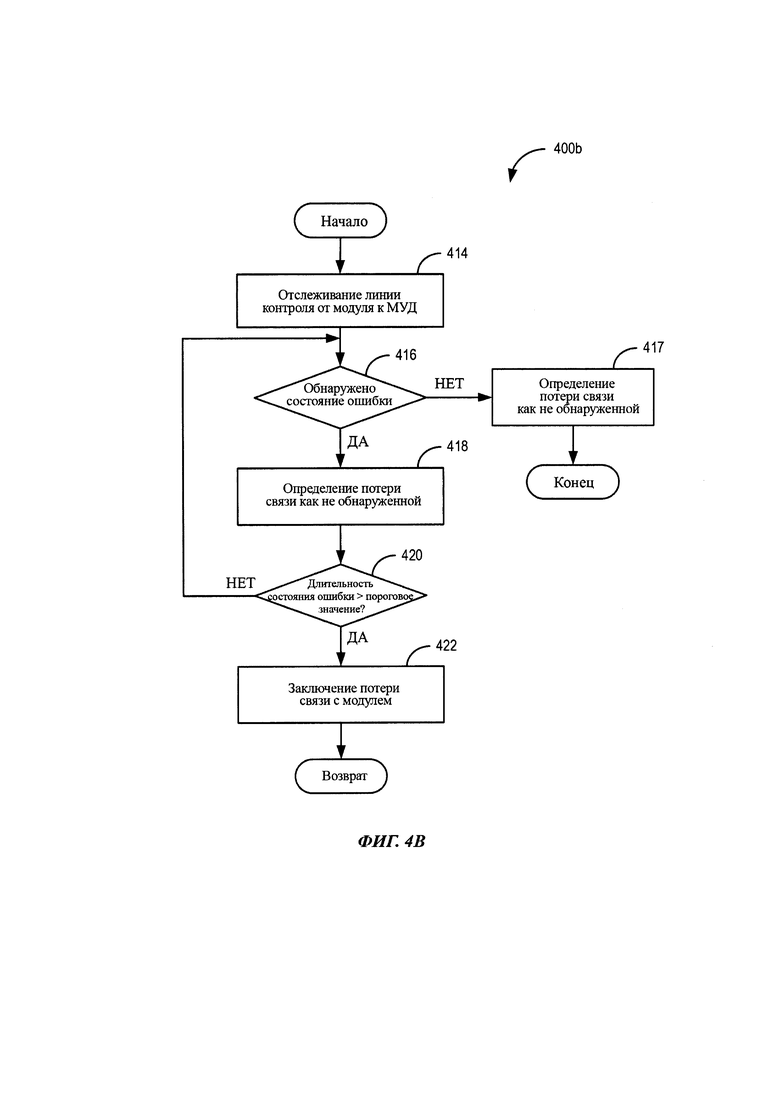
На фиг. 4В представлен высокоуровневый алгоритм, иллюстрирующий второй пример способа выявления потери связи с модулем системы управления транспортного средства.
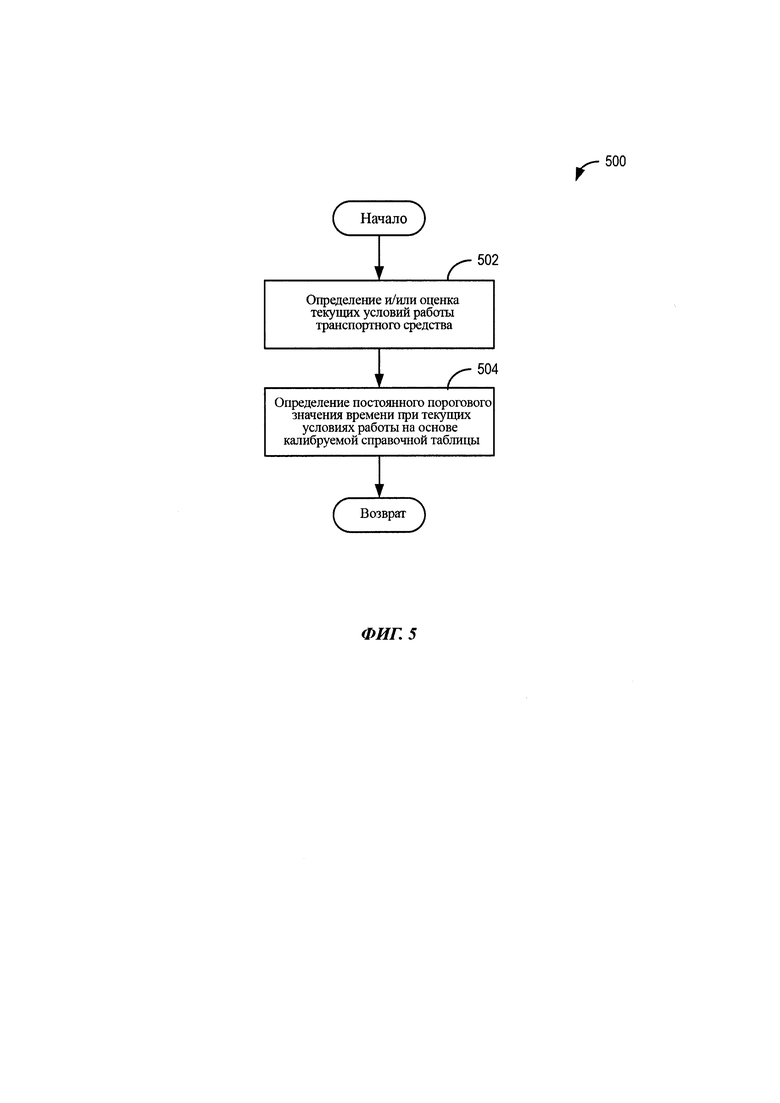
На фиг. 5 представлен высокоуровневый алгоритм, иллюстрирующий пример способа определения постоянного порогового значения времени.
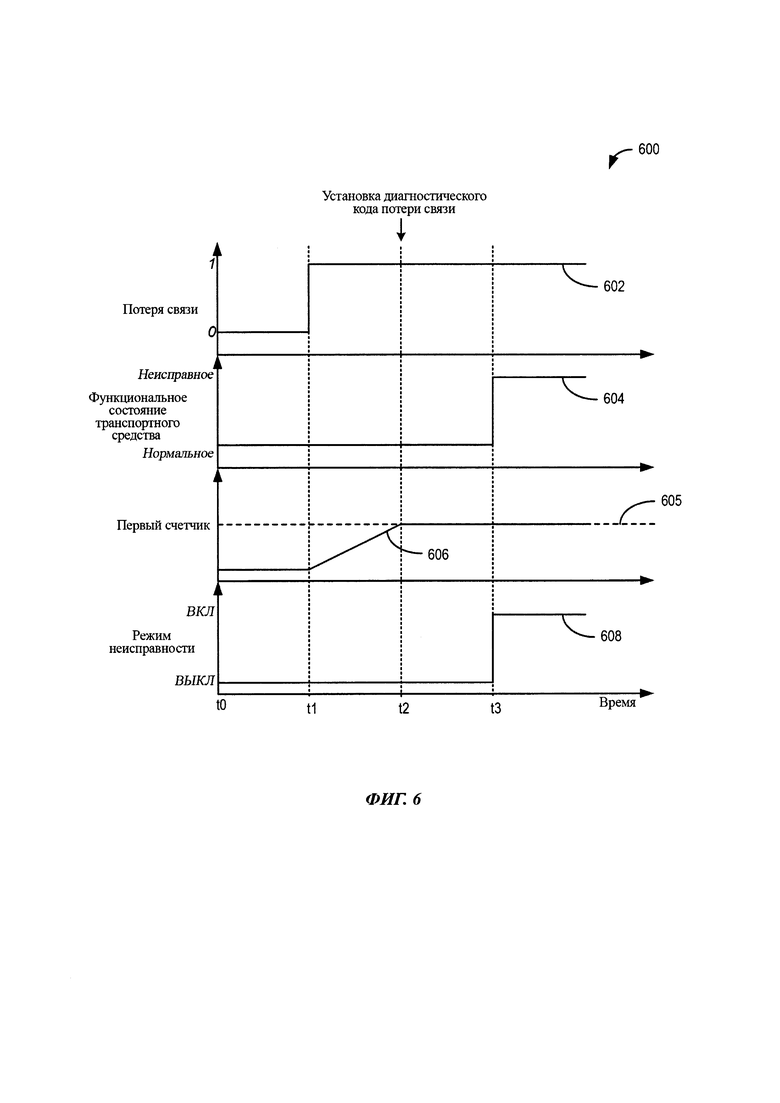
На фиг. 6 представлен пример установки диагностического временного кода потери связи в соответствии с настоящим изобретением.
Осуществление изобретения
Приведенное ниже описание относится к системам и способам для выявления потери связи в информационной сети транспортного средства, такой как информационная сеть транспортного средства, представленная на фиг. 1, которая содержит систему двигателя и топливную систему, представленные на фиг. 2. Один или несколько контроллеров в информационной сети транспортного средства могут быть выполнены с возможностью реализации алгоритмов управления, таких как алгоритм на фиг. 3, для установки диагностического временного кода в ответ на выявление потери связи с одним или несколькими модулями в информационной сети в соответствии с алгоритмами фиг. 4А-4В. Кроме того, в соответствии с алгоритмом фиг. 5 может быть определено пороговое значение времени диагностики для установки диагностического временного кода. Пример установки диагностического временного кода потери связи в соответствии с настоящим изобретением представлен на фиг. 6.
Обратимся к фиг. 1, где схематически показан пример осуществления механического транспортного средства 102, оснащенного сетевой системой 110 транспортного средства, соединяющей множество модулей 114 управления. Механическое транспортное средство 102, среди прочих типов транспортных средств, может быть дорожным автомобилем. Транспортное средство 102 содержит ведущие колеса 105, лобовое стекло 101, боковые зеркала 103 и двигатель 10 внутреннего сгорания. Двигатель 10 внутреннего сгорания содержит камеру сгорания (не показана), которая может получать впускной воздух через впускной тракт (не показан), и может осуществлять выпуск отработавших продуктов сгорания через выпускной канал (не показан).
Механическое транспортное средство 102 дополнительно содержит сетевую систему 110 транспортного средства, содержащую множество модулей 114 управления с возможностью коммуникации посредством сетевой шины 130 и управления различными функциями транспортного средства. Коммуникация по шине может содержать обеспечение локальной сетью контроллера возможности гибкого конфигурирования сети в зависимости от типов микропроцессоров и микроконтроллера. Множество модулей 114 управления может содержать, в том числе, но не ограничиваясь, модуль 132 активной заслонки решетки радиатора (АЗРР), модуль 134 управления системой пассивной безопасности (МУСПБ), модуль 136 управления двигателем (МУД), модуль 138 антиблокировочной тормозной системы (АБС), модуль 139 управления помпой хладагента двигателя (МУПХД), модуль 140 управления отоплением, вентиляцией и кондиционированием (МУОВК), модуль 142 управления колонкой рулевого управления (МУКРУ), модуль 144 управления кластером панели приборов (МУКПП), модуль 146 автоматического поддержания скорости (МАПС), модуль 148 управления кузовом (МУК), модуль 150 управления коробкой передач (МУКП), модуль 152 управления зарядом аккумулятора (МУЗА), модуль 154 управления гибридной силовой установкой (МУГСУ), и электронный модуль 156 управления топливного насоса (ЭМН). Сетевая шина может работать с использованием одного или нескольких протоколов связи, таких как протокол локальной сети контроллера (ЛСК), или протокол волоконно-оптической передачи данных мультимедийных систем (ПДМС). Упомянутые модули могут осуществлять обмен данными в конфигурации с равноправными узлами. В качестве альтернативы, может быть использована конфигурация ведущий-ведомый.
В представленном примере показана одна сетевая шина 130 передачи данных. Однако, следует понимать, что сетевая шина передачи данных может дополнительно осуществлять обмен данными данными с одной или несколькими другими шинами передачи данных, каждая из которых содержит один или несколько дополнительных модулей управления.
Каждый из модулей 114 управления, для осуществления раскрытых в настоящей заявке управляющих алгоритмов и воздействий, может быть связан с возможностью обмена данными с различными компонентами транспортного средства 100, в том числе с двигателем 10. Кроме того, каждый из подсоединенных к сетевой шине 130 модулей 114 управления может содержать свой собственный электронный цифровой контроллер 112. Контроллер 112 может быть микрокомпьютером, содержащим микропроцессорное устройство, порты ввода/вывода, электронное запоминающее устройство для исполняемых программ и калибровочных значений, оперативное запоминающее устройство, энергонезависимое запоминающее устройство и шину данных.
Как видно, каждый из контроллеров 112, содержащихся в каждом модуле управления, может получать входные данные от множества датчиков 116, к которым могут относиться один или несколько пользовательских входных сигналов и/или датчиков (таких как датчики барометрического давления, выбранная передача коробки передач, положения муфты коробки передач, входной сигнал педали акселератора, входной сигнал педали тормоза, положение переключателя коробки передач, скорость транспортного средства, скорость вращения двигателя, массовый расход воздуха через двигатель, температура окружающего воздуха, температура воздуха на впуске, и другие), датчиков системы климат-контроля (таких как температура хладагента, температура адсорбента, скорость вращения вентилятора, температура в пассажирском салоне, желательная температура в пассажирском салоне, влажность окружающего воздуха, и так далее), и другие.
Кроме того, контроллер 112 может обмениваться данными с различными исполнительными механизмами 124, к которым могут относиться один или несколько исполнительных механизмов двигателя (таких как топливные инжекторы, электронно-управляемая дроссельная заслонка, свечи зажигания, муфты коробки передач, и так далее), исполнительных механизмов системы климат-контроля (таких как дефлекторы управления потоком воздуха и/или распределительные клапаны, клапаны управления потоком хладагента, приводы воздуходувки, приводы вентилятора, и так далее) и другие. В дополнение к этому, контроллер 112 может получать данные от системы глобального позиционирования и/или бортовой развлекательно-информационной системы транспортного средства 100.
Кроме того, информационная сеть 110 транспортного средства может быть соединена с возможностью передачи данных с внешней информационной сетью (не показана), такой как облачная вычислительная система, посредством беспроводной связи, которая может представлять собой Wi-Fi, Bluetooth, одну из разновидностей сотовой связи, или протокол беспроводной передачи данных.
Информационная сеть 110 транспортного средства может дополнительно содержать диагностический модуль для контроля связи с каждым из модулей 114 управления в сети, выявления потери связи с модулями управления, и установки ДКН (например, ДКН потери связи). В некоторых примерах, в качестве альтернативы или дополнительно, каждый из модулей управления может содержать вспомогательный модуль управления для контроля связи, выявления потери связи с модулями управления, и установки ДКН. Примеры управляющих алгоритмов для контроля связи с модулями, выявления потери связи с модулями и установки ДКН потери связи могут быть сохранены в диагностическом контроллере диагностического модуля и/или во вспомогательном контроллере вспомогательного модуля и будут раскрыты более подробно со ссылкой на фиг. 3-5.
Итак, в определенных условиях работы двигателя может быть потеряна связь с одним или несколькими модулями в информационной сети. Соответственно, может быть недоступна информация для организации доступа и для обеспечения соответствующего функционирования транспортного средства, что может привести к неисправной работе транспортного средства. Кроме того, неисправность может возникнуть до активации ДКН потери связи. Поэтому, с целью активации ДКН потери связи до начала неисправной работы транспортного средства, пороговое значение времени диагностики (то есть, минимальная длительность потери связи, после которой может быть установлен ДКН потери связи) для установки ДКН потери связи может быть определено на основе предположительной длительности до наступления неисправности, вызванной потерей связи. Например, пороговое значение времени диагностики для установки ДКН потери связи может быть меньше предположительной длительности до наступления неисправности. Более подробно определение порогового значения времени диагностики и установка ДКН потери связи раскрыты со ссылкой на фиг. 3-6.
В одном из примеров система фиг. 1 представляет собой систему транспортного средства, содержащую: множество электронных модулей управления, осуществляющих управление различными функциями транспортного средства, причем каждый из множества модулей управления выполнен с возможностью обмена данными по шине локальной сети контроллера системы управления транспортного средства; линию контроля, осуществляющую передачу диагностических данных между первым модулем управления и одному из электронных модулей управления множества модулей управления; контроллер с сохраненными в долговременной памяти машиночитаемыми командами для: выявления потери связи с первым модулем на основе обнаружения состояния ошибки линии контроля; корректирования первой постоянной времени в ответ на выявление потери связи на основе предположительной длительности до наступления неисправности транспортного средства по причине потери связи с первым модулем; при этом выявление потери связи осуществляется на основе состояния ошибки линии контроля.
Упомянутая система дополнительно отличается тем, что корректирование первой постоянной времени содержит уменьшение этой постоянной времени до значения ниже упомянутой предположительной длительности; что контроллер содержит дополнительные команды для установки диагностического временного кода в ответ на превышение счетчиком откорректированной постоянной времени, и перевода транспортного средства на работу в режиме неисправности в ответ на установку диагностического кода потери связи; и что запуск упомянутого счетчика осуществляется в ответ на выявление потери связи с первым модулем посредством линии контроля.
На фиг. 2 схематически представлена гибридная транспортная система 6, которая может получать тяговую мощность от системы 8 двигателя и/или от бортового устройства накопления энергии, такого как аккумуляторная система (не показана). Устройство преобразования энергии, такое как генератор (не показан), может быть использовано для поглощения энергии движения транспортного средства и/или работы двигателя, и последующего преобразования поглощенной энергии в энергию такой формы, которая пригодна для накопления устройством накопления энергии.
Система 8 двигателя может содержать двигатель с множеством цилиндров 30. Двигатель 10 содержит впускную систему 23 двигателя и выпускную систему 25 двигателя. Впускная система 23 двигателя содержит впускной воздушный дроссель 62, выполненный в коммуникации по текучей среде со впускным коллектором 44 двигателя через впускной канал 42. Воздух может попадать во впускной канал 42 через воздушный фильтр 52. Выпускная система 25 двигателя содержит выпускной коллектор 48, ведущий к выпускному каналу 35, который направляет отработавшие газы в атмосферу. Выпускная система 25 двигателя может содержать одно или несколько устройств 70 снижения выбросов, смонтированных жестко соединенными вместе. В число упомянутых одного или нескольких устройств снижения выбросов могут входить трехкомпонентный каталитический нейтрализатор, ловушка NOx обедненной смеси, дизельный сажевый фильтр, окислительный каталитический нейтрализатор, и так далее. Следует понимать, что в состав двигателя могут входить другие компоненты, такие как различные клапаны и датчики, как более подробно раскрыто в настоящей заявке. В некоторых вариантах осуществления, в которых система 8 двигателя является системой двигателя с наддувом, система двигателя может дополнительно содержать устройство наддува, такое как турбонагнетатель (не показан).
Система 8 двигателя соединена с топливной системой 18. Топливная система 18 содержит топливный бак 20, соединенный с топливным насосом 21 и емкостью 22 для паров топлива. В течение дозаправки топливного бака топливо может быть закачано в транспортное средство из внешнего источника через заправочную горловину 108. Топливный бак 20 выполнен с возможностью вмещать множество топливных смесей, таких как топливо с различным содержанием спирта, к которому относятся различные смеси бензина и этанола, среди которых топливо ЕЮ, Е85, бензин, и другие, и их сочетания. Датчик 106 уровня топлива, расположенный в топливном баке 20, может снабжать информацией об уровне топлива контроллер 12. Как видно, датчик 106 уровня топлива может содержать поплавок, соединенный с переменным резистором. В качестве альтернативы, могут быть использованы другие типа датчиков уровня топлива.
Топливный насос 21 выполнен с возможностью подачи топлива под давлением к инжекторам двигателя 10, таким как пример инжектора 66. Несмотря на то, что показан единственный инжектор 66, дополнительные инжекторы предусмотрены для каждого из цилиндров. Следует понимать, что топливная система 18 может быть безвозвратной топливной системой, топливной системой с возвратом, или топливной системой различных других типов. Образующиеся в топливном баке 20 пары могут быть направлены в емкость 22 для паров топлива по трубопроводу 31, а затем выпущены во впускную систему 23 двигателя.
Емкость 22 для паров топлива заполнена подходящим адсорбентом для временного улавливания паров топлива (в том числе, парообразных углеводородов), образовавшихся при операциях по дозаправке топливного бака, а также паров, связанных с суточным циклом. В одном из примеров используемым адсорбентом является активированный уголь. При выполнении условий для выпуска, таких как заполнение емкости, пары, хранящиеся в емкости 22 для паров топлива, могут быть выпущены во впускную систему 23 двигателя посредством открытия продувочного клапана 162 емкости. Несмотря на то, что показана только одна емкость 22, следует понимать, что топливная система 18 может содержать любое количество емкостей. В одном из примеров продувочный клапан 162 емкости может представлять собой соленоидный клапан, отличающийся тем, что открытие или закрытие этого клапана осуществляется посредством приведения в действие соленоида продувки емкости.
Емкость 22 содержит вентиляционный патрубок, обеспечивающий направление газов из емкости 22 в атмосферу при накоплении, или улавливании, топливных паров из топливного бака 20. Вентиляционный патрубок 27 может также обеспечивать возможность втягивания в емкость 22 для паров топлива свежего воздуха при осуществлении выпуска накопленных паров топлива во впускную систему 23 двигателя по трубопроводу 28 продувки через продувочный клапан 162. Несмотря на то, что в данном примере вентиляционный патрубок 27 показан соединенным со свежим, не подогреваемым воздухом, могут быть также использованы различные другие модификации. Вентиляционный патрубок 27 может содержать вентиляционный клапан 164 емкости для регулирования потока воздуха и паров между емкостью 22 и атмосферой. В одном из примеров вентиляционный клапан 164 емкости может представлять собой соленоидный клапан, отличающийся тем, что открытие или закрытие этого клапана осуществляется посредством приведения в действие соленоида вентиляции емкости.
С топливной системой 18 могут быть соединены один или несколько датчиков 120 давления для обеспечения оценки давления в топливной системе. С топливной системой 18 могут быть также соединены один или несколько датчиков 121 температуры для обеспечения оценки температуры в топливной системе.
Управление топливной системой 18 может осуществлять электронный модуль 156 управления топливного насоса (ЭМН), содержащий контроллер 12, который получает информацию от множества входящих в состав топливной системы датчиков 16, и передает управляющие сигналы множеству входящих в состав топливной системы исполнительных механизмов 81. Например, топливная система может работать в режиме впрыска, при котором контроллер 12 может активировать топливный насос для подачи необходимого количества топлива в топливную рампу для сжигания.
Аналогичным образом, управление системой 8 двигателя может, по меньшей мере частично, осуществлять модуль 136 управления двигателем (МУД), содержащий контроллер 212, который получает информацию от множества датчиков 216 (различные примеры которых раскрыты в настоящей заявке), и передает управляющие сигналы множеству исполнительных механизмов 281. В качестве одного из примеров, к датчикам 16 могут относиться датчик TIP, датчик влажности, датчик абсолютного давления в коллекторе (АДК) и датчик температуры заряда в коллекторе (ТЗК). В качестве другого примера, к исполнительным механизмам 81 могут относиться топливный инжектор 66 и впускной дроссель 62. К различным местам системы 8 двигателя могут быть присоединены другие исполнительные механизмы, такие как различные дополнительные клапаны и дроссели. Контроллер 212 может получать входные данные от различных датчиков, обрабатывать входные данные, и приводить в действие исполнительные механизмы в соответствии со входными данными на основе команд или кодов, запрограммированных в нем в соответствии с одним или несколькими алгоритмами.
Кроме того, в некоторых примерах, как ЭМН 156, так и МУД 136 могут содержать вспомогательный диагностический модуль для контроля связи и выявления потери связи с ЭМН. Дополнительно, или в качестве альтернативы, контроль связи и диагностику ЭМН или МУД может осуществлять диагностический модуль (не показан), соединенный с информационной сетью транспортного средства (такой как информационная сеть 110 транспортного средства, представленная на фиг. 1). В некоторых других примерах МУД может осуществлять контроль связи с ЭМН посредством линии контроля (не показана), соединяющей ЭМН и МУД.
В одном из примеров может осуществляться обнаружение потери связи с ЭМН. В ответ на потерю связи может быть определена предположительная длительность до неисправности транспортного средства при текущих условиях работы (в данном примере, предположительная длительность, после которой транспортное средство глохнет из-за недостатка крутящего момента, вызванного потерей связи с ЭМН. Кроме того, на основе предположительной длительности до наступления неисправности при текущих условиях работы транспортного средства может быть определено пороговое значение времени диагностики для установки ДКН потери связи. При достижении счетчиком (который может быть запущен в ответ на выявление потери связи) порогового значения времени диагностики может быть установлен ДКН потери связи. Например, пороговое значение времени диагностики может быть меньше предположительной длительности до наступления неисправности. Таким образом, ДКН потери связи может быть установлен до начала неисправной работы транспортного средства. Например, если потеря связи с ЭМН при скорости в 70 миль в час может привести к глушению транспортного средства через 3 секунды, для активации ДКН потери связи с ЭМН до глушения транспортного средства установленное пороговое значение времени диагностики может быть менее 3 секунд.
Обратимся к фиг. 3, где представлен пример способа 300 для установки диагностического кода потери связи в системе управления транспортного средства, содержащей множество модулей (например, модулей 114 управления, показанных на фиг. 1), подсоединенных к информационной сети транспортного средства (например, к показанной на фиг. 1 информационной сети 110). Способ фиг. 3 может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве каждого контроллера (например, показанного на фиг. 1 контроллера 112), и может быть реализован контроллером и различными датчиками, исполнительными механизмами и аппаратными средствами двигателя и транспортного средства, показанными на фиг. 1-2. В дополнение к этому, или в качестве альтернативы, способ фиг. 3 может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве диагностического контроллера, входящего в состав диагностического модуля, который подсоединен к информационной сети транспортного средства (например, информационной сети 110 на фиг. 1).
На этапе 302 способ 300 содержит отслеживание данных от каждого из множества модулей информационной сети транспортного средства. В одном из примеров отслеживание одного или нескольких ожидаемых сигналов от каждого из множества модулей информационной сети транспортного средства может осуществлять диагностический модуль, соединенный с информационной сетью транспортного средства. Ожидаемый сигнал может быть передан каждым из множества модулей в предопределенном формате, включающем в себя начало кадра, идентификатор, бит запроса дистанционной передачи или бит подмены запроса на передачу, дополнительный идентификатор, резервный бит, код размерности данных, данные, циклический контроль посредством избыточности, бит подтверждения, конец кадра, межкадровый промежуток, и другое. В другом примере диагностический модуль может отслеживать данные в одной или нескольких линиях контроля, каждая из которых соединяет модуль с МУД. Еще в одном примере МУД может отслеживать линии контроля каждого из модулей, соединенных с МУД линией (линиями) контроля. По существу, диагностический модуль может быть централизованным диагностическим модулем, отслеживающим данные каждого из множества модулей. В некоторых примерах каждый модуль может содержать вспомогательный диагностический модуль для отслеживания данных и диагностики потери связи. В некоторых других примерах может быть использован гибридный подход, в котором при некоторых условиях может быть использован централизованный диагностический модуль, и при некоторых других условиях может быть использован вспомогательный диагностический модуль (модули). Еще в одном примере централизованный диагностический модуль может быть использован для отслеживания сигналов одной или нескольких групп модулей, каждая из которых содержит некоторое количество отдельных модулей, содержащих вспомогательные диагностические модули.
Далее, на этапе 304 способ 300 содержит определение факта выявления потери связи с каким-либо из множества модулей. Примеры способов выявления потери связи более подробно показаны на фиг.4А-4В. В одном из примеров потеря связи может быть выявлена на основании отсутствия одного или более ожидаемых сигналов в течение первой длительности, превышающей первое пороговое значение длительности. В другом примере потеря связи может быть выявлена на основании состояния ошибки линии (линий) контроля, соединяющих один или несколько модулей с МУД, на протяжении второй длительности, превышающей второе пороговое значение длительности. По существу, первая и вторая длительности могут превышать минимальную длительность, которая может соответствовать длительности снижения или сбоя активности данных, например, во время одного или нескольких режимов, таких как режим запуска транспортного средства, режим циклического переключения модулей, и/или высокой активности в информационной сети транспортного средства. В случае положительного ответа на этапе 304 потеря связи выявлена и, соответственно, способ 300 переходит к этапу 305. В случае отрицательного ответа на этапе 304 потеря связи не выявлена и, соответственно, осуществляется выход из способа 300.
На этапе 305 способ 300 содержит запуск счетчика (306) для активации диагностического кода неисправности (ДКН) потери связи. Кроме того, может быть определено пороговое значение (307) времени диагностики для активации ДКН потери связи. Пороговое значение времени диагностики может быть основано на предположительной длительности до наступления неисправности по причине потери связи при текущих условиях работы транспортного средства. Более подробно определение порогового значения времени диагностики раскрыто со ссылкой на фиг. 5.
Далее, на этапе 308 способ 300 содержит проверку условия, что значение счетчика больше или равно пороговому значению времени диагностики. В случае положительного ответа выявленная потеря связи может повлиять на характеристики транспортного средства (например, охлаждение двигателя, контроль климата, дорожные качества автомобиля) и, соответственно, способ 300 переходит к этапу 309. На этапе 309 способ 300 содержит активацию диагностического временного кода (этап 310) потери связи для того модуля, с которым выявлена потеря связи. Далее способ 300 содержит сброс счетчика (этап 311). Например, при выявлении потери связи с модулем управления топливным насосом (ЭМН), и при определении достижения счетчиком порогового значения времени диагностики, может быть записан ДКН U0109, указывающий на потерю связи с модулем управления топливным насосом. Аналогично, если выявлена потеря связи с модулем управления гибридной силовой установкой, и счетчик достиг или превышает пороговое значение времени диагностики, может быть активирован ДКН U0293, соответствующий потере связи с модулем управления гибридной силовой установкой. ДКН как таковой может быть выполнен с возможностью чтения универсальным считывателем диагностических кодов известного в уровне техники типа. Кроме того, в некоторых примерах может осуществляться индикация потери связи оператору транспортного средства. В одном из примеров индикатор может быть визуальным, например, подсвечиваемым сигналом на приборной панели транспортного средства. В другом примере индикатор может быть звуковым.
Затем, после активации ДКН потери связи, способ 300 может перейти к этапу 318. На этапе 318 способ 300 может содержать работу транспортного средства в режиме неисправности.
Возвращаясь к этапу 308, если счетчик не достигает порогового значения времени диагностики, способ 300 может перейти к этапу 312. На этапе 312 способ 300 содержит проверку восстановления связи с упомянутым модулем. Например, восстановление связи с упомянутым модулем может быть определено на основе обнаружения ожидаемого сигнала (сигналов) от этого модуля. В другом примере восстановление связи с упомянутым модулем может быть определено на основе возвращения линии контроля из состояния ошибки в рабочее состояние. В случае положительного ответа на этапе 312 связь с модулем восстановлена и, соответственно, ДКН потери связи не может быть активирован. Если ответ на этапе 312 отрицательный, ожидаемый сигнал упомянутого модуля не обнаружен и/или линия контроля остается в состоянии ошибки. Поэтому при отсутствии обнаружения нормальной связи с упомянутым модулем способ 300 может перейти к этапу 316. На этапе 316 значение счетчика может быть инкрементировано. После инкрементирования счетчика способ 300 может вернуться к этапу 308 для определения факта достижения или превышения счетчиком порогового значения времени диагностики.
Таким образом, в ответ на выявление потери связи, ДКН потери связи может быть установлен до перехода транспортного средства в режим неисправности по причине потери связи с одним или несколькими модулями управления.
В одном из примеров способ, представленный на фиг. 3, представляет собой способ для транспортного средства, содержащий: определение первого порогового значения времени для установки диагностического кода неисправности, соответствующего потере связи, на основе предположительной длительности, приводящей к неисправной работе из-за потери связи с первым модулем управления, соединенным с информационной сетью транспортного средства, которая соединяет множество модулей управления транспортного средства. Упомянутый способ дополнительно содержит установку диагностического кода неисправности, соответствующего потере связи, в ответ на превышение счетчиком первого порогового значения времени, причем запуск упомянутого счетчика осуществляется в ответ на выявление потери связи с первым модулем.
Упомянутый способ дополнительно отличается тем, что пороговое значение времени меньше предположительной длительности до наступления неисправности, причем предположительная длительность до наступления неисправности основана на одном или нескольких из нижеперечисленных условиях: скорости транспортного средства, условиях нагрузки транспортного средства, барометрическом давлении, и условиях работы одного или нескольких компонентов транспортного средства, осуществляющих обмен информацией с первым модулем во время выявления потери связи.
Упомянутый способ дополнительно отличается тем, что выявление потери связи содержит отсутствие обнаружения одного или нескольких ожидаемых сигналов первого модуля, и что выявление потери связи содержит определение состояния ошибки линии контроля, по которой осуществляется обмен данными между первым модулем и модулем управления двигателем (МУД) транспортного средства; и что упомянутое состояние ошибки определяется на основе того, что МУД не получает данные от первого модуля по линии контроля.
Кроме того, упомянутый способ содержит работу транспортного средства в режиме неисправности в ответ на выявление неисправности по причине потери связи, и упомянутый способ дополнительно отличается тем, что установка диагностического кода неисправности, соответствующего потере связи, осуществляется до перехода в режим неисправности.
Обратимся к фиг. 4А, где представлен пример способа 400а для выявления потери связи с модулем управления, соединенным с информационной сетью транспортного средства (например, с показанной на фиг. 1 информационной сетью 110). Как таковой, модуль управления может осуществлять управление одной или несколькими функциями транспортного средства в системе транспортного средства, содержащей информационную сеть транспортного средства. Способ, представленный на фиг. 4, может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве контроллера (например, показанного на фиг. 1 контроллера 112), и может быть реализован контроллером совместно с различными датчиками, исполнительными механизмами и компонентами двигателя и транспортного средства, показанными на фиг. 1-2. В дополнение к этому, или в качестве альтернативы, способ, представленный на фиг. 3, может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве диагностического контроллера, входящего в состав диагностического модуля, который подсоединен к информационной сети транспортного средства (например, информационной сети 110 на фиг. 1).
На этапе 402 способ 400 содержит отслеживание одного или нескольких ожидаемых сигналов модуля управления. Например, диагностический модуль, соединенный с информационной сетью транспортного средства, может отслеживать ожидаемый сигнал (сигналы) каждого соединенного с информационной сетью модуля. В некоторых примерах отслеживание ожидаемого сигнала (сигналов) модуля управления может осуществлять вспомогательный модуль, входящий в состав этого модуля управления. В некоторых других примерах ожидаемый сигнал (сигналы) могут отслеживать диагностический модуль и вспомогательный модуль. В других примерах ожидаемый сигнал (сигналы) одного или нескольких модулей управления в информационной сети может отслеживать диагностический модуль, тогда как ожидаемый сигнал (сигналы) остальных модулей (то есть, модулей, контроль которых не осуществляется диагностическим модулем) может отслеживаться вспомогательными модулями, входящими в состав каждого из остальных модулей. Ожидаемый сигнал может быть передан каждым из множества модулей в предопределенном формате, включающем в себя начало кадра, идентификатор, бит запроса дистанционной передачи или бит подмены запроса на передачу, дополнительный идентификатор, резервный бит, код размерности данных, данные, циклический контроль посредством избыточности, бит подтверждения, конец кадра, межкадровый промежуток, и другое. Далее, на этапе 404 способ 400 содержит определение факта детектирования ожидаемого сигнала. Например, ожидаемый сигнал, переданный по информационной сети транспортного средства, может быть детектирован модулем (таким, как диагностический модуль, вспомогательный модуль, МУД, и так далее), осуществляющим отслеживание этого сигнала. В случае положительного ответа способ 400 может перейти к этапу 406 для определения потери связи как не выявленной. В случае отрицательного ответа на этапе 404 ожидаемый сигнал не детектирован, и, соответственно, способ 400 может перейти к этапу 408. На этапе 408 способ 400 содержит определение длительности отсутствия ожидаемого сигнала. В одном из примеров в ответ на отсутствие детектирования ожидаемого сигнала может быть запущен второй счетчик, или инкрементировано его значение. Длительность отсутствия ожидаемого сигнала может быть определена на основе значения этого счетчика.
После определения длительности отсутствия ожидаемого сигнала способ 400 может быть продолжен на этапе 410. На этапе 410 в способе 400 может быть определено, превышает ли эта длительность отсутствия второе пороговое значение длительности. В случае положительного ответа на этапе 410 способ 400 может перейти к этапу 412. В случае отрицательного ответа на этапе 410 способ 400 возвращается к этапу 404. На этапе 412, исходя из подтверждения превышения упомянутой длительностью отсутствия второго порогового значения длительности в способе 400 может быть сделано заключение о потере связи с упомянутым модулем. То есть, исходя из подтверждения того факта, что длительность отсутствия ожидаемого сигнала превышает второе пороговое значение длительности, в способе 400 может быть принято решение о потере упомянутым модулем управления связи с информационной сетью транспортного средства.
Обратимся к фиг. 4В, где представлен пример способа 400b для выявления потери связи с модулем управления, соединенным с информационной сетью транспортного средства (например, с показанной на фиг. 1 информационной сетью 110). Как таковой, модуль управления может осуществлять управление одной или несколькими функциями транспортного средства в системе транспортного средства, содержащей информационную сеть транспортного средства. Способ, представленный на фиг. 4, может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве контроллера (например, показанного на фиг. 1 контроллера 112), и может быть реализован контроллером совместно с различными датчиками, исполнительными механизмами и компонентами двигателя и транспортного средства, показанными на фиг. 1-2. В дополнение к этому, или в качестве альтернативы, способ, представленный на фиг. 3, может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве диагностического контроллера, входящего в состав диагностического модуля, который подсоединен к информационной сети транспортного средства (например, информационной сети 110 на фиг. 1).
На этапе 414 способ 400 содержит отслеживание линии контроля, соединяющей модуль управления с МУД. Линия контроля может содержать диагностические данные для определения функционирования связи с модулем управления. В одном из примеров линию контроля может отслеживать диагностический модуль, соединенный с информационной сетью транспортного средства. В другом примере отслеживание линии контроля может осуществлять вспомогательный модуль, входящий в состав модуля управления. В еще одном примере линию контроля может отслеживать МУД. В некоторых других примерах отслеживание линии контроля может осуществляться сочетанием двух или нескольких нижеперечисленных модулей: диагностического модуля, вспомогательного модуля и МУД. В других примерах один или нескольких модулей управления в информационной сети может отслеживать диагностический модуль, тогда как остальные модули (то есть, модули, контроль которых не осуществляется диагностическим модулем) могут отслеживать вспомогательные модули, входящие в состав каждого из остальных модулей и/или МУД.
Далее, на этапе 416 способ 400 содержит определение факта обнаружения состояния ошибки линии контроля. Например, состояние ошибки может быть обнаружено модулем (таким, как диагностический модуль, вспомогательный модуль, МУД, и так далее), осуществляющим отслеживание сигнала. Кроме того, состояние ошибки может быть определено на основе отсутствия одного или нескольких сигналов в линии контроля. В некоторых примерах состояние ошибки может быть определено на основе наличия в линии контроля укороченного или видоизмененного сигнала. В случае отрицательного ответа способ 400 может перейти к этапу 417 для определения потери связи как не выявленной. В случае положительного ответа на этапе 404 линия контроля находится в состоянии ошибки и, соответственно, способ 400 может перейти к этапу 418. На этапе 418 способ 400 содержит определение длительности состояния ошибки. В одном из примеров в ответ на определение нахождения линии контроля в состоянии ошибки может быть запущен счетчик состояния ошибки, или может быть инкрементировано его значение. Длительность состояния ошибки может быть определена на основе значения этого счетчика.
После определения длительности состояния ошибки в линии контроля способ 400 может перейти к этапу 420. На этапе 420 в способе 400 может быть определено, превышает ли длительность состояния ошибки пороговое значение длительности состояния ошибки. В случае положительного ответа на этапе 420 способ 400 может перейти к этапу 422. В случае отрицательного ответа на этапе 420 способ 400 возвращается к этапу 416. На этапе 420, исходя из подтверждения превышения длительностью состояния ошибки порогового значения длительности состояния ошибки в способе 400 может быть сделано заключение о потере связи с упомянутым модулем. То есть, исходя из подтверждения того факта, что длительность нахождения линии контроля в состоянии ошибки превышает пороговое значение длительности состояния ошибки, в способе 400 может быть принято решение о потере упомянутым модулем управления связи с информационной сетью транспортного средства.
Таким образом, может быть осуществлен контроль связи с множеством модулей в информационной сети транспортного средства и может быть выявлена потеря связи с модулями.
Обратимся к фиг. 5, где показан способ 500 определения порогового значения времени диагностики. Пороговое значение времени диагностики может быть использовано для установки диагностического временного кода потери связи. Например, в ответ на выявление потери связи с модулем управления, соединенным с информационной сетью транспортного средства, длительность которой превышает пороговое значение времени диагностики, может быть установлен ДКН потери связи. Другими словами, рациональное принятие решений об установке ДКН потери связи может быть основано на пороговом значении времени диагностики. Способ фиг. 5 может быть сохранен в виде исполнимых команд в постоянном запоминающем устройстве контроллера (например, показанного на фиг.1 контроллера 112), и может быть реализован контроллером совместно с различными датчиками, исполнительными механизмами, и компонентами двигателя и транспортного средства, показанными на фиг. 1-2.
На этапе 502 способ 500 содержит оценку и/или измерение условий работы транспортного средства. К условиям работы транспортного средства могут относиться, например, скорость вращения двигателя (Ns), скорость транспортного средства (Vs), требуемый крутящий момент, давление наддува, АДК, массовый расход воздуха (МРВ), температура двигателя, воздушно-топливное отношение (ВТО) процесса сгорания, температура каталитического нейтрализатора отработавших газов, внешние условия (например, барометрическое давление (БД)), и так далее.
Далее, на этапе 504 способ 500 содержит определение порогового значения времени диагностики для установки ДКН потери связи при текущих условиях работы транспортного средства на основе калибруемой справочной таблицы. Калибруемая справочная таблица может быть создана на основе текущих условий работы, и, в дальнейшем, на основе предположительной длительности до начала неисправной работы транспортного средства или заметного оператору ухудшения характеристик транспортного средства по причине потери связи. То есть, пороговое значение времени диагностики может быть основано на предположительной длительности до наступления неисправности и/или ухудшения характеристик транспортного средства по причине потери связи с модулем при текущих условиях работы транспортного средства. Предположительная длительность до наступления неисправности и/или длительность до ухудшения характеристик транспортного средства может быть основана на одном или нескольких из нижеперечисленного: скорости транспортного средства, условиях нагрузки транспортного средства, барометрическом давлении, и условиях работы одного или нескольких компонентов транспортного средства, осуществляющих обмен информацией с модулем (с которым выявлена потеря связи) во время выявления потери связи. В одном из примеров пороговое значение времени диагностики может быть меньше длительности до наступления неисправности по причине потери связи.
В одном из примеров, в случае потери связи с электронным модулем управления топливным насосом (ЭМН) пороговое значение времени диагностики потери связи с ЭМН может быть основано на предположительной длительности работы двигателя до глушения транспортного средства, вызванного недостатком топлива (и, следовательно, недостатком крутящего момента), при текущих условиях работы транспортного средства. Например, предположительная длительность до возникновения неисправности (то есть, длительность до глушения) при работе в условиях высоких нагрузок (например, работе транспортного средства на шоссе, во время буксировки тяжелых грузов, и так далее) может быть меньше предположительной длительности до возникновения неисправности при работе в условиях низких нагрузок. Следовательно, пороговое значение времени диагностики ДКН потери связи с ЭМН при работе в условиях высоких нагрузок может быть меньше порогового значения времени диагностики ДКН потери связи с ЭМН при работе в условиях низких нагрузок. Например, в ответ на потерю связи с ЭМН, если предположительная длительность до возникновения неисправности (то есть, предположительная длительность до глушения) составляет при семидесяти милях в час три секунды, пороговое значение времени диагностики может быть менее трех секунд. В результате, ДКН потери связи с ЭМН может быть установлен до глушения транспортного средства, что обеспечивает возможность выявления потери связи с ЭМН.
В другом примере пороговое значение времени до установки ДКН потери связи с модулем управления помпой хладагента двигателя может быть основано на предположительной длительности до ухудшения характеристик транспортного средства с точки зрения охлаждения двигателя, контроля климата и дорожных качеств при текущих условиях работы транспортного средства.
Таким образом, посредством определения порогового значения времени диагностики на основе предположительной длительности до наступления неисправности по причине потери связи при текущих условиях работы транспортного средства, ДКН потери связи может быть установлен до наступления неисправности транспортного средства. За счет установки ДКН потери связи до наступления неисправности транспортного средства может быть определена причина неисправности транспортного средства (в данном случае, потеря связи с модулем управления).
На фиг. 6 показана рабочая последовательность 600, которая является графическим представлением примера активации диагностического кода потери связи в ответ на выявление потери связи с модулем управления в информационной сети транспортного средства, такой как информационная сеть 110 транспортного средства, представленная на фиг. 1. На фиг. 6 проиллюстрированы примеры графика 602 положения педали, графика 604 функционального состояния транспортного средства, графика 606 первого счетчика для установки диагностического кода неисправности, соответствующего потере связи, и графика 608 режима неисправности. Последовательность событий на фиг. 6 может быть обеспечена посредством выполнения команд в системе, представленной на фиг. 1-2, в соответствии со способом фиг. 3-5. Вертикальные отметки в моменты времени t0-t3 обозначают характерные моменты времени в течение этой последовательности. Во всех рассматриваемых ниже графиках ось X является осью времени, и время увеличивается на каждом из графиков слева направо.
Первый график сверху на фиг. 6 является графиком потери связи во времени. Ось Y является осью потери связи. Нулевое значение соответствует отсутствию выявленной потери связи, и единичное значение соответствует наличию выявленной потери связи.
Второй график сверху на фиг. 6 является графиком функционального состояния транспортного средства во времени. Ось Y отражает неисправное или нормальное функциональное состояние транспортного средства.
Третий график сверху на фиг. 6 является графиком значения первого счетчика во времени. Ось Y является осью значения первого счетчика и это значение возрастает в направлении стрелки оси Y. Горизонтальная линия 605 обозначает пороговое значение времени диагностики для установки диагностического кода неисправности, соответствующего потере связи с модулем управления. Пороговое значение времени диагностики может быть основано на текущих условиях работы транспортного средства и на предположительной длительности до наступления неисправности по причине потери связи с модулем управления.
Четвертый график сверху на фиг. 6 является графиком режима неисправности транспортного средства во времени. Ось Y отражает состояние режима неисправности.
В моменты времени между t0 и t1 потеря связи с модулем управления в транспортном средстве не может быть выявлена. Соответственно, транспортное средство может работать ожидаемым образом (то есть, может быть обеспечена нормальная работа транспортного средства без потери связи и нарушения функций) и первый счетчик для установки ДКН потери связи может быть обнулен.
В момент времени t1 может быть выявлена потеря связи с модулем управления. В одном из примеров потеря связи может быть выявлена на основании отсутствия одного или более ожидаемых сигналов модуля управления. В другом примере потеря связи может быть выявлена на основе обнаружения состояния ошибки диагностической линии контроля, соединяющей модуль управления с МУД. Более подробно выявление потери связи раскрыто на фиг. 4А-4В. При выявлении потери связи с модулем может быть запущен первый счетчик. В дальнейшем пороговое значение 605 времени диагностики может быть откорректировано на основе предположительной длительности до наступления неисправной работы транспортного средства или ухудшения характеристик транспортного средства по причине потери связи, при текущих условиях работы. Например, если выявлена потеря связи с ЭМН и транспортное средство работает в условиях высоких нагрузок, пороговое значение времени диагностики может быть основано на предположительной длительности до глушения транспортного средства (из-за недостатка крутящего момента, вызванного недостатком топлива по причине потери связи с ЭМН) в условиях высоких нагрузок. Если потеря связи с ЭМН выявлена при работе транспортного средства в условиях низких нагрузок, пороговое значение времени диагностики может быть основано на предположительной длительности до глушения транспортного средства (из-за недостатка крутящего момента, вызванного недостатком топлива по причине потери связи с ЭМН) в условиях низких нагрузок. Соответственно, с целью установки ДКН потери связи до наступления неисправности транспортного средства, вызванной потерей связи с упомянутым модулем, пороговое значение времени диагностики может быть меньше предположительной длительности до неисправности транспортного средства по причине потери связи.
В моменты времени между t1 и t2 связь с ЭМН может не быть восстановлена и, соответственно, значение первого счетчика может продолжать увеличиваться. В момент времени t2 этот счетчик может достигнуть пороговое значение времени диагностики для активации ДКН потери связи. При достижении первым счетчиком порогового значения времени диагностики может быть активирован ДКН потери связи. Например, в ответ на достижение счетчиком потери связи с ЭМН порогового значения диагностики ЭМН при текущих условиях работы, может быть активирован ДКН потери связи с ЭМН (например, U0109). Аналогично, в ответ на достижение счетчиком потери связи с модулем автоматического поддержания скорости (МАПС) порогового значения диагностики МАПС при текущих условиях работы, может быть активирован ДКН потери связи с МАПС (например, U0104).
В момент времени t3 транспортное средство может перейти в состояние неисправности по причине потери связи с упомянутым модулем. Как следствие, может быть активирован ДКН для отказавшей функции транспортного средства, и транспортное средство может работать в режиме неисправности. Например, по причине потери связи с ЭМН отклонение текущего крутящего момента от требуемого крутящего момента может превышать пороговое значение отклонения крутящего момента. В результате может быть активирован ДКН, соответствующий потере крутящего момента. Несмотря на то, что в вышеприведенном примере проиллюстрирован переход в режим неисправности в ответ на обнаружение отказа функции транспортного средства, в некоторых примерах транспортное средство может работать в режиме неисправности при активации ДКН потери связи. То есть, транспортное средство может быть переведено в режим неисправности в момент времени t2 вместо t3.
Таким образом, системы транспортных средств могут быть оснащены функцией интеллектуального выявления потери связи, причем пороговое значение для активации ДКН потери связи определяется на основе предположительной длительности до наступления неисправности по причине потери связи при текущих условиях работы, за счет чего установка ДКН потери связи осуществляется до перехода транспортного средства в неисправный режим работы. В результате этого может быть улучшена диагностика потери связи транспортного средства.
В одном из примеров способ для выявления потери связи в системе управления транспортного средства может содержать: запуск первого счетчика в ответ на выявление потери связи с первым модулем, соединенным с локальной сетью контроллера системы управления; и установка диагностического временнóго кода потери связи в ответ на превышение первым счетчиком первого порогового значения времени диагностики; причем первое пороговое значение времени диагностики меньше предположительной длительности до наступления неисправности по причине потери связи.
Упомянутый способ дополнительно отличается тем, что предположительная длительность до наступления неисправности получают из калибруемой справочной таблицы, в которой в качестве входных данных используют одно или несколько из нижеперечисленного: скорость транспортного средства, требуемую нагрузку, барометрическое давление, температуру окружающей среды и условия работы одного или нескольких компонентов транспортного средства, осуществляющих обмен данными с первым модулем во время выявления потери связи. В некоторых примерах упомянутый способ отличается тем, что выявление потери связи осуществляется на основе отсутствия обнаружения одного или нескольких сигналов в линии контроля между первым модулем и модулем управления двигателем в течение второго порогового значения времени.
Упомянутый способ дополнительно содержит работу транспортного средства в режиме неисправности в ответ на установку диагностического кода неисправности, соответствующего потере связи. Кроме того, упомянутый способ отличается тем, что первым модулем является электронный модуль насоса ЭМН; и что ЭМН управляет работой топливного насоса, расположенного в топливном баке транспортного средства, и неисправностью является превышение дифференциалом требуемого выдаваемого крутящего момента и текущего выдаваемого крутящего момента порогового значения выдаваемого крутящего момента.
Упомянутый способ дополнительно содержит работу транспортного средства в режиме неисправности в ответ на выявление потери связи с ЭМН.
Необходимо отметить, что примеры приведенных здесь алгоритмов управления и оценки могут быть использованы с двигателями и/или системами транспортных средств различных конструкций. Раскрытые в настоящей заявке способы и алгоритмы управления могут быть сохранены в виде исполнимых команд в постоянном запоминающем устройстве, и могут быть реализованы системой управления, содержащей контроллер в сочетании с различными датчиками, исполнительными механизмами и другими аппаратными средствами двигателя. Конкретные раскрытые в настоящей заявке алгоритмы могут представлять собой одну или несколько из любого количества стратегий вычислений, таких как основанная на событиях, основанная на прерываниях, многозадачная, многопоточная и тому подобные. Таким образом, различные описанные действия, процессы и/или функции могут быть выполнены в представленной последовательности, параллельно, или, в некоторых случаях, могут быть опущены. Аналогично, такой порядок вычислений не обязателен для достижения преимуществ и реализации признаков раскрытых в настоящей заявке примеров осуществления, но приведен для простоты графического представления и описания. Одно или несколько описанных действий, процессов и/или функций могут быть выполнены повторно в зависимости от конкретной используемой стратегии. Более того, описанные действия, процессы и/или функции могут графически представлять код, который должен быть записан в энергонезависимой памяти машиночитаемого запоминающего устройства в системе управления двигателем, в которой описанные действия реализуются посредством исполнения команд в системе, содержащей различные аппаратные средства двигателя в сочетании с электронным контроллером.
Следует понимать, что конфигурации и последовательности, раскрытые в данном документе, являются по своей сути примерами, и эти конкретные варианты осуществления не должны быть восприняты в ограничивающем значении, поскольку возможно множество модификаций. Например, вышеупомянутая технология может быть применена к V-образному шестицилиндровому, рядному четырехцилиндровому, рядному шестицилиндровому, V-образному двенадцатицилиндровому, оппозитному четырехцилиндровому и другим типам двигателей. Предмет настоящего изобретения включает в себя все новые и неочевидные сочетания и частичные сочетания различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В последующей формуле изобретения конкретно указаны определенные сочетания и частичные сочетания, которые следует считать новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Другие сочетания и частичные сочетания раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2012 |
|
RU2547545C2 |
| СПОСОБ ПРОВЕРКИ СИСТЕМЫ ПРОДУВКИ ПАРОВ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНЫМ ПРИВОДОМ И СПОСОБ ПРОВЕРКИ СИСТЕМЫ ПРОДУВКИ ПАРОВ НА БОРТУ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2532863C2 |
| СПОСОБ, СПОСОБ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2637274C2 |
| ВЫЯВЛЕНИЕ ПОГРЕШНОСТИ В ПРЕДЕЛАХ ДИАПАЗОНА ДАТЧИКА ДАВЛЕНИЯ ТОПЛИВА | 2017 |
|
RU2684147C1 |
| СПОСОБ ДИАГНОСТИКИ СИСТЕМЫ ОХЛАЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2602845C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПИТАНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2720021C2 |
| СПОСОБ ДЛЯ СИСТЕМЫ ОХЛАЖДЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2620928C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ, СПОСОБ ДЛЯ ТОПЛИВНОЙ СИСТЕМЫ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2577690C2 |
| СРЕДСТВА СВЯЗИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2573272C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2673562C2 |
Предложен способ для выявления потери связи в информационной сети транспортного средства, содержащий определение первого порогового значения времени для установки диагностического кода неисправности, соответствующего потере связи, на основе предположительной длительности до нарушения работы транспортного средства из-за потери связи с первым модулем управления, соединенным с информационной сетью транспортного средства, которая соединяет множество модулей управления транспортного средства. Предложены также способ для выявления потери связи в системе управления транспортного средства и система для выявления потери связи в информационной сети транспортного средства. Достигается установление действительной причины неисправности транспортного средства. 3 н. и 17 з.п. ф-лы, 7 ил.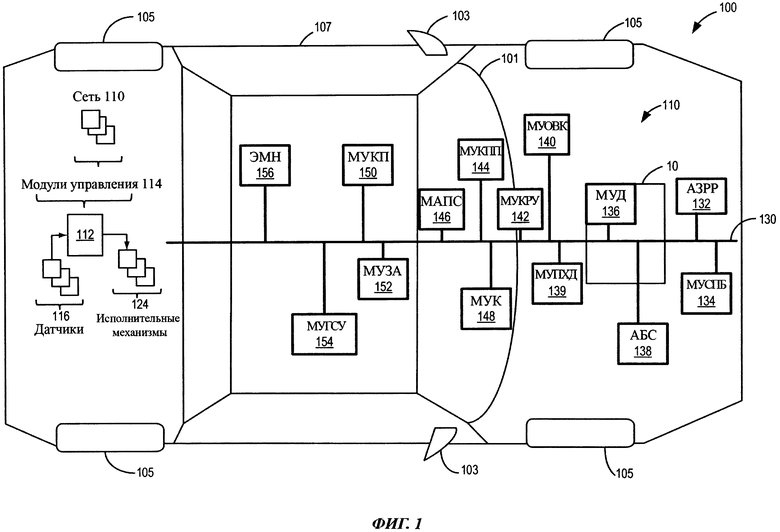
1. Способ для выявления потери связи в информационной сети транспортного средства, содержащий:
определение первого порогового значения времени для установки диагностического кода неисправности, соответствующего потере связи, на основе предположительной длительности до нарушения работы транспортного средства из-за потери связи с первым модулем управления, соединенным с информационной сетью транспортного средства, которая соединяет множество модулей управления транспортного средства.
2. Способ по п. 1, дополнительно содержащий установку диагностического кода неисправности, соответствующего потере связи, в ответ на превышение счетчиком первого порогового значения времени.
3. Способ по п. 2, в котором запуск упомянутого счетчика осуществляют в ответ на выявление потери связи с первым модулем управления.
4. Способ по п. 2, в котором упомянутое пороговое значение времени меньше предположительной длительности до нарушения работы транспортного средства.
5. Способ по п. 4, в котором предположительная длительность до нарушения работы транспортного средства основана на одном или более из нижеперечисленных условий: скорости транспортного средства, условиях нагрузки транспортного средства, длительности намокания транспортного средства, длительности включенного состояния транспортного средства, температуре хладагента двигателя, текущем местоположении транспортного средства, скорости вращения двигателя, требуемом крутящем моменте, состоянии высоковольтного заряда, барометрическом давлении и условиях работы одного или нескольких компонентов транспортного средства, осуществляющих обмен информацией с первым модулем управления во время выявления потери связи.
6. Способ по п. 3, в котором выявление потери связи содержит отсутствие детектирования одного или более ожидаемых сигналов первого модуля.
7. Способ по п. 3, в котором выявление потери связи содержит определение состояния ошибки линии контроля, по которой осуществляют обмен данными между первым модулем и модулем управления двигателем (МУД) транспортного средства.
8. Способ по п. 7, в котором упомянутое состояние ошибки определяют на основе того, что МУД не получает данные от первого модуля по линии контроля.
9. Способ по п. 3, дополнительно содержащий работу транспортного средства в режиме неисправности в ответ на выявление нарушения работы транспортного средства, вызванного потерей связи.
10. Способ по п. 9, в котором установку диагностического кода неисправности, соответствующего потере связи, осуществляют до перехода в режим неисправности.
11. Способ для выявления потери связи в системе управления транспортного средства, содержащий:
запуск первого счетчика в ответ на выявление потери связи с первым модулем, соединенным с локальной сетью контроллера системы управления; и
установку диагностического временного кода потери связи в ответ на превышение первым счетчиком первого порогового значения времени диагностики;
причем первое пороговое значение времени диагностики меньше предположительной длительности до наступления неисправности транспортного средства по причине потери связи.
12. Способ по п. 11, в котором предположительную длительность до наступления неисправной работы транспортного средства получают из калибруемой справочной таблицы, в которой в качестве входных данных используют одно или более из нижеперечисленного: скорость транспортного средства, требуемая нагрузка, барометрическое давление, температура окружающей среды, длительность намокания транспортного средства, длительность включенного состояния транспортного средства, температура хладагента двигателя, текущее местоположение транспортного средства, скорость вращения двигателя, требуемый крутящий момент, состояние высоковольтного заряда и условия работы одного или нескольких компонентов транспортного средства, осуществляющих обмен информацией с первым модулем во время выявления потери связи.
13. Способ по п. 12, в котором выявление потери связи осуществляют на основе отсутствия детектирования одного или нескольких сигналов в линии контроля между первым модулем и модулем управления двигателем в течение второго порогового значения времени.
14. Способ по п. 13, дополнительно содержащий работу транспортного средства в режиме неисправности в ответ на установку диагностического кода неисправности, соответствующего потере связи.
15. Способ по п. 13, в котором первый модуль представляет собой электронный модуль насоса и в котором электронный модуль насоса управляет работой топливного насоса, расположенного в топливном баке транспортного средства.
16. Способ по п. 14, в котором неисправность представляет собой превышение отклонением текущего выходного крутящего момента от требуемого выходного крутящего момента порогового значения отклонения выходного крутящего момента.
17. Способ по п. 16, дополнительно содержащий работу транспортного средства в режиме неисправности в ответ на выявление потери связи с электронным модулем насоса.
18. Система для выявления потери связи в информационной сети транспортного средства, содержащая:
множество электронных модулей управления, выполненных с возможностью управления множеством функций транспортного средства, причем каждый из множества модулей управления выполнен с возможностью обмена данными по шине локальной сети контроллера системы управления транспортного средства; линию контроля, обеспечивающую возможность обмена диагностическими данными между первым модулем управления и электронными модулями управления из множества модулей управления;
контроллер с сохраненными в долговременной памяти машиночитаемыми командами для:
выявления потери связи с первым модулем на основе обнаружения состояния ошибки линии контроля;
в ответ на выявление потери связи, корректирования первой постоянной времени на основе предположительной длительности до наступления неисправности транспортного средства по причине потери связи с первым модулем;
при этом есть возможность выявления потери связи на основе состояния ошибки линии контроля.
19. Система по п. 18, в которой корректирование первой постоянной времени содержит уменьшение этой постоянной времени до значения ниже упомянутой предположительной длительности.
20. Система по п. 19, в которой контроллер содержит дополнительные команды для установки диагностического временного кода в ответ на превышение счетчиком откорректированной постоянной времени, и перевод транспортного средства на работу в режиме неисправности в ответ на установку диагностического кода потери связи; причем есть возможность запуска упомянутого счетчика в ответ на выявление потери связи с первым модулем посредством линии контроля.
| US 20050171721 A1, 04.08.2005 | |||
| US 20110035180 A1, 10.02.2011 | |||
| Способ измерения отношения сигнала к квазипиковому значению помехи путем оценки этого отношения на осциллографе при совпадении видимых границ нижних и верхних пиков помехи | 1959 |
|
SU129686A1 |
| БОРТОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА (БИУС) АВТОМОБИЛЯ | 2002 |
|
RU2203814C1 |

