ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка на патент является частичным продолжением и испрашивает приоритет по заявке на выдачу патента США № 14/696,759, которая была подана 27 апреля 2015 года, которая включена в материалы настоящей заявки посредством ссылки во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе и способу для управления питанием транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Подсистемы транспортного средства часто запитаны, когда зажигание транспортного средства включено. Некоторые подсистемы, такие как внутренние фонари, могут включаться, даже если питание транспортного средства выключено в других обстоятельствах. Внутренние фонари, например, могут включаться, когда открывается одна из дверей. Другие подсистемы, подобные информационно-развлекательной системе, могут оставаться включенными в течение короткого времени после того, как зажигание транспортного средства выключено.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно одному аспекту изобретения предложена система управления питанием транспортного средства, содержащая: модуль управления питанием, содержащий процессор, имеющий регистр направления передачи данных (DDR), который включает в себя первый порт и логическую схему, соединенную с процессором и по меньшей мере одной подсистемой транспортного средства, причем первый порт предварительно установлен в направление ввода, причем процессор запрограммирован с возможностью: определять состояние зажигания и скорость транспортного средства; когда состояние зажигания является выключенным и скорость находится выше предварительно определенного порогового значения, подавать питание по меньшей мере в одну подсистему транспортного средства посредством логической схемы; и когда состояние зажигания является выключенным и скорость находится ниже предварительно определенного порогового значения, переключать первый порт в направление вывода, чтобы снимать питание с по меньшей мере одной подсистемы транспортного средства.
Согласно одному варианту осуществления системы DDR включает в себя второй порт, который предварительно установлен в направление ввода, причем процессор дополнительно запрограммирован с возможностью: когда состояние зажигания является выключенным и скорость находится ниже предварительно определенного порогового значения, переключать второй порт в направление вывода, причем питание снимается с по меньшей мере одной подсистемы транспортного средства только тогда, когда оба из первого и второго портов переключены в направление вывода.
Согласно другому варианту осуществления системы логическая схема содержит схему регулировки питания, которая выполнена с возможностью поддерживать питание в по меньшей мере одну подсистему транспортного средства, когда состояние зажигания является выключенным.
Согласно другому варианту осуществления системы логическая схема содержит по меньшей мере один драйвер подсистемы транспортного средства, который способствует подаче питания по меньшей мере в одну подсистему транспортного средства, когда по меньшей мере один драйвер подсистемы транспортного средства включен, причем логическая схема выполнена с возможностью включения по меньшей мере одного драйвера подсистемы транспортного средства, когда первый порт находится в направлении ввода и когда процессор подает независимый сигнал управления, указывающий одно из следующего: состояние зажигания является включенным или скорость транспортного средства больше, чем предварительно определенное пороговое значение, в то время как состояние зажигания является выключенным.
Согласно другому варианту осуществления системы логическая схема содержит схему регулировки питания, которая переключаемым образом подает первое питание или второе питание по меньшей мере в одну подсистему транспортного средства, причем первое питание связано с первичным источником питания транспортного средства, при этом второе питание подается в упомянутый по меньшей мере один драйвер подсистемы транспортного средства в отсутствие первого питания.
Согласно второму аспекту изобретения предложен способ управления питанием транспортного средства, содержащий этапы, на которых: определяют в процессоре модуля управления питанием в транспортном средстве состояние зажигания транспортного средства, причем процессор включает в себя регистр направления передачи данных (DDR) и соединен по меньшей мере с одной подсистемой транспортного средства; определяют в процессоре скорость транспортного средства; сравнивают в процессоре скорость с предварительно определенным пороговым значением; когда состояние зажигания является выключенным и когда скорость находится выше предварительно определенного порогового значения, подают питание по меньшей мере в одну подсистему транспортного средства и когда состояние зажигания является выключенным и когда скорость находится ниже предварительно определенного порогового значения, переключают порт DDR из направления ввода в направление вывода, чтобы снимать питание по меньшей мере с одной подсистемы транспортного средства.
Согласно одному варианту осуществления способа DDR имеет множество портов, а способ дополнительно содержит переключение по меньшей мере двух из множества портов из направления ввода в направление вывода, чтобы снимать питание по меньшей мере с одной подсистемы транспортного средства.
Согласно другому варианту осуществления способа по меньшей мере два из множества портов находятся в направлении вывода одновременно.
Согласно другому варианту осуществления способа модуль управления питанием дополнительно содержит логическую схему, которая включает в себя схему регулировки питания, которая выполнена с возможностью переключаемым образом подавать первое питание или второе питание по меньшей мере в одну подсистему транспортного средства, когда порт DDR сконфигурирован в направлении ввода, причем первое питание связано с первичным источником питания транспортного средства, при этом второе питание подается в отсутствие первого питания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
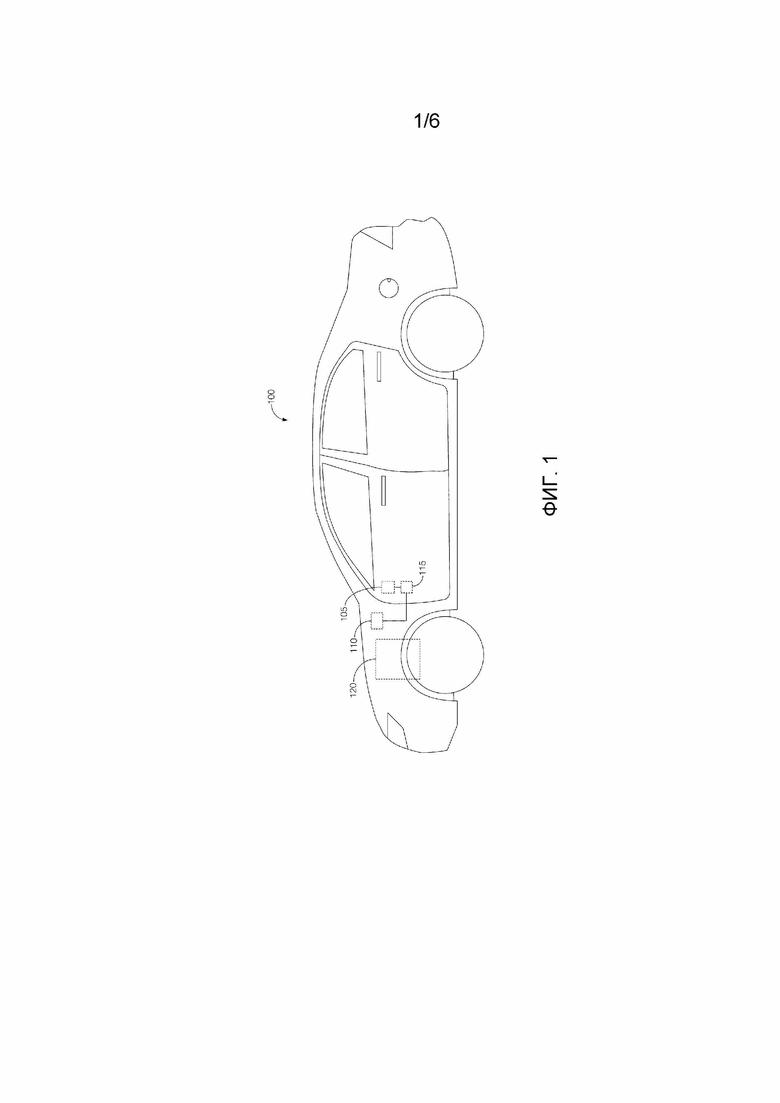
Фиг. 1 иллюстрирует примерное транспортное средство, реализующее модуль управления питанием для подачи питания в некоторые подсистемы транспортного средства при определенных обстоятельствах.
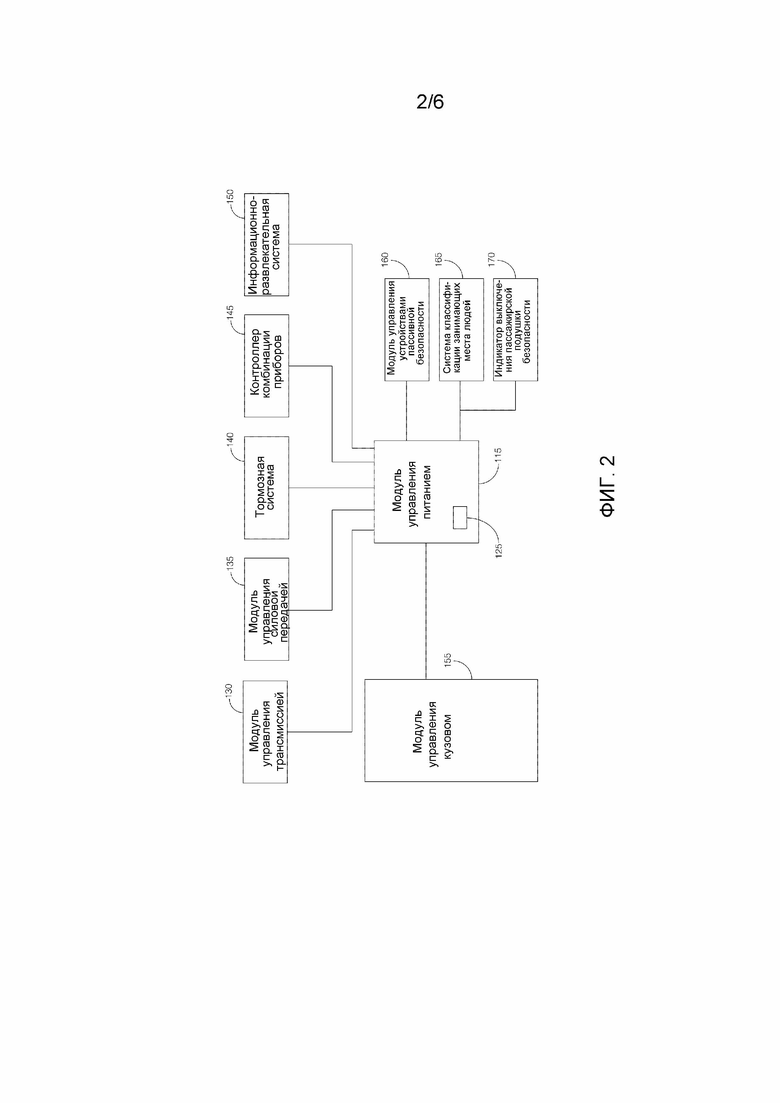
Фиг. 2 - структурная схема примерного модуля управления питанием и подсистем транспортного средства.
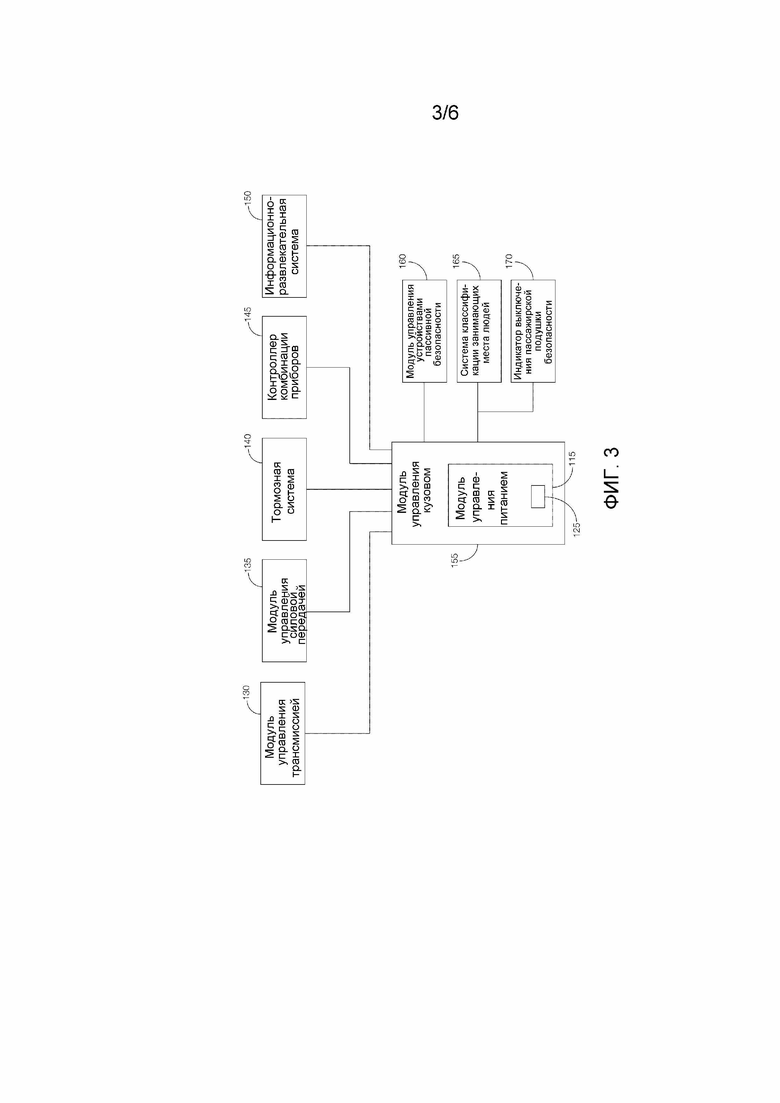
Фиг. 3 - структурная схема модуля управления питанием, включенного в модуль управления кузовом.
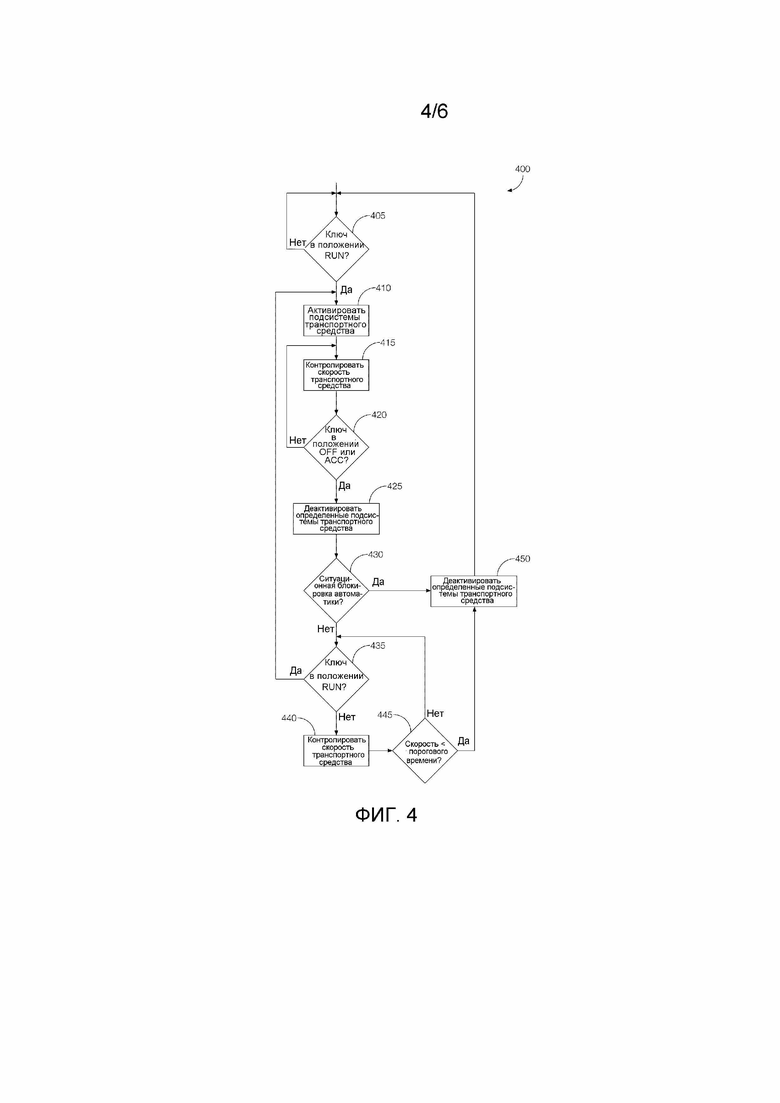
Фиг. 4 - блок-схема последовательности операций способа примерной последовательности операций, которая может выполняться модулем управления питанием для подачи питания в некоторые подсистемы транспортного средства при определенных обстоятельствах.
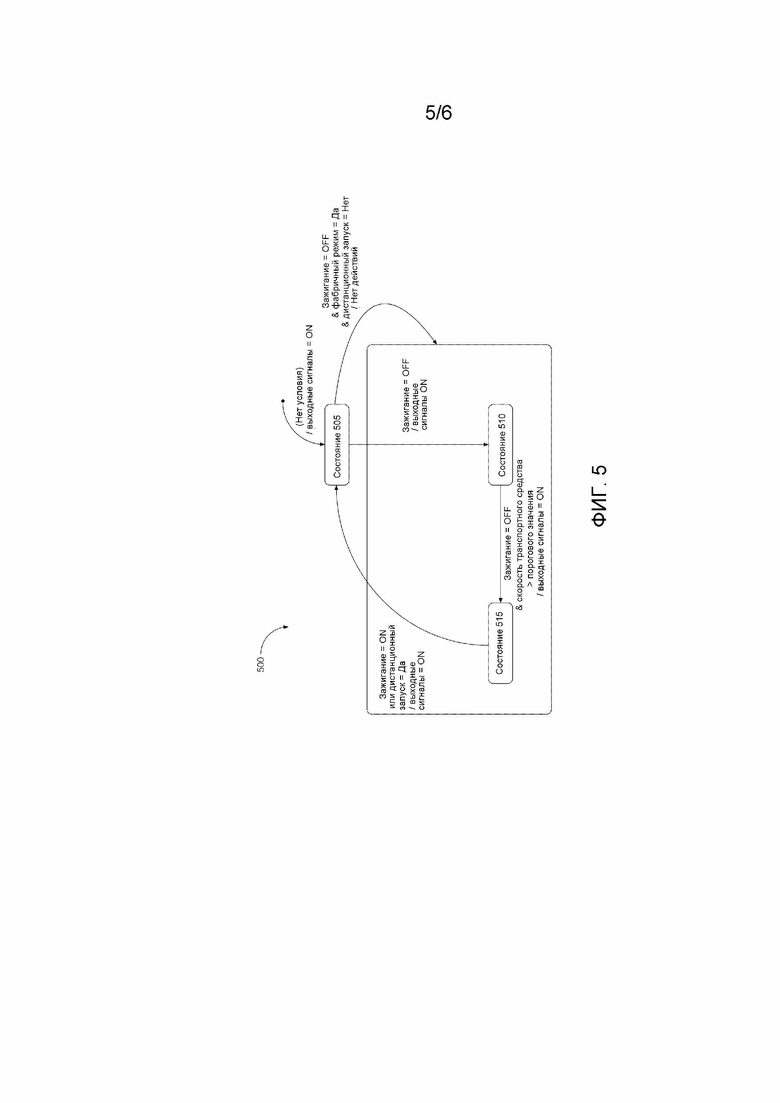
Фиг. 5 - примерный конечный автомат, показывающий возможные состояния модуля управления питанием.
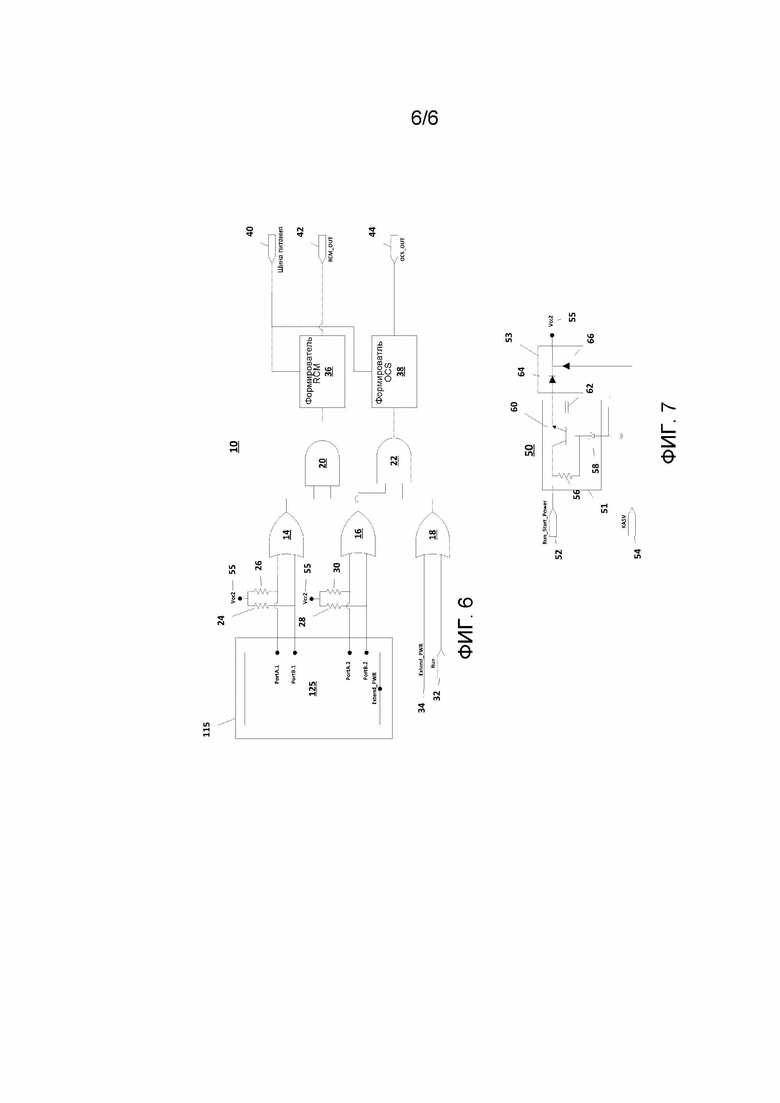
Фиг. 6 - принципиальная схема примерной логической схемы резервного питания модуля управления питанием.
Фиг. 7 - принципиальная схема примерной схемы полустабилизированного резервного источника питания.
ПОДРОБНОЕ ОПИСАНИЕ
Данное описание делает ссылку на фигуры, на которых одинаковые номера указывают идентичные части на всем протяжении нескольких видов. Показанные элементы могут принимать много разных форм и включать в себя многочисленные и/или альтернативные компоненты и оборудование. Примерные проиллюстрированные компоненты не подразумеваются ограничивающими. Несомненно, могут использоваться дополнительные или альтернативные компоненты и/или реализации.
Выключение зажигания транспортного средства часто предполагается целенаправленным - то есть, что водитель имеет намерение выключить подсистемы транспортного средства и выйти из транспортного средства. Если система зажигания выходит из строя или иным образом непреднамеренно выключается, в то время как транспортное средство движется, некоторые подсистемы и их соответствующие функциональные возможности могут, как следствие, деактивироваться непреднамеренно. Один из способов предотвращать выключение определенных подсистем вслед за выходом из строя системы зажигания, в то время как транспортное средство движется, включает в себя устройство обработки, запрограммированное определять состояние зажигания и скорость транспортного средства. Устройство обработки питает энергией по меньшей мере одну подсистему транспортного средства, если состояние зажигания является выключенным, а скорость транспортного средства находится выше предопределенного порогового значения. Устройство обработки может деактивировать подсистему транспортного средства, когда скорость транспортного средства падает ниже предопределенного порогового значения.
Как проиллюстрировано на фиг. 1, базовое транспортное средство 100 включает в себя систему 105 зажигания, аккумуляторную батарею 110 и модуль 115 управления питанием. Хотя проиллюстрировано в качестве автомобиля с кузовом седан, базовое транспортное средство 100 может включать в себя любое пассажирское или коммерческое транспортное средство, такое как легковой автомобиль, грузовой автомобиль, автомобиль для активного отдыха, транспортное средство повышенной проходимости, фургон, пассажирский минифургон, такси, автобус, мотоциклы, и т. д. В некоторых возможных подходах, базовое транспортное средство 100 является автономным транспортным средством, выполненным с возможностью работать в автономном (например, без водителя) режиме, частично автономном режиме и/или неавтономном режиме.
Система 105 зажигания может включать в себя замок зажигания, расположенный в пассажирском отделении базового транспортного средства 100. Замок зажигания может быть выполнен с возможностью принимать ключ. Ключ может использоваться для установки системы 105 зажигания в некоторое количество разных состояний, как подробнее обсуждено ниже. Базовое транспортное средство 100 может работать в соответствии с состоянием зажигания. В качестве альтернативы или в дополнение, состояние зажигания также могло бы определяться в соответствии с системой отпирания дверей без ключа или системой запуска без ключа, иногда указываемыми ссылкой как система пассивного отпирания дверей/пассивного запуска или просто система пассивного запуска.
Аккумуляторная батарея 110 может включать в себя любое количество устройств, выполненных с возможностью подавать электроэнергию в одну или более подсистем транспортного средства. Благодаря химическим реакциям, аккумуляторная батарея 110 может вырабатывать электрический заряд. Химические реакции могут происходить в некотором количестве элементов, скомпонованных последовательно или параллельно. Токопроводящие выводы могут быть расположены на корпусе аккумуляторной батареи. Электроэнергия может выдаваться в подсистемы транспортного средства, непосредственно или опосредованно присоединенные к выводам. Питание аккумуляторной батареи может избирательно выдаваться в определенные подсистемы транспортного средства, как подробнее обсуждено ниже.
Модуль 115 управления питанием может включать в себя любое вычислительное устройство, имеющее устройство 125 обработки, запрограммированное определять состояние зажигания и скорость транспортного средства. Состояние зажигания может определяться по состоянию ключа, например, положению ключа в замке зажигания. Примерные состояния ключа, а потому, состояния зажигания, могут включать в себя состояние RUN, состояние ACC, состояние Run_Start и состояние OFF. Состояние RUN может указывать намерение водителя, чтобы включались двигатель транспортного средства и все подсистемы транспортного средства. Состояние ACC может указывать желание водителя, чтобы определенные подсистемы транспортного средства (например, вспомогательные агрегаты) включались, но чтобы двигатель транспортного средства оставался выключенным. Состояние OFF может указывать желание водителя, чтобы двигатель и большинство или все подсистемы транспортного средства выключались.
Модуль 115 управления питанием может быть запрограммирован определять или отслеживать состояния ключа в хронологическом порядке. То есть, модуль 115 управления питания может определять текущее состояние ключа на основании существующего положения ключа в замке зажигания и предыдущее состояние ключа на основании предыдущего положения ключа в замке зажигания. В качестве примера, текущее состояние ключа может быть состоянием RUN, а предыдущее состояние ключа может быть состоянием OFF или ACC. Еще один пример может вынуждать текущее состояние ключа включать в себя состояние OFF, а предыдущее состояние ключа включать в себя состояние RUN или ACC.
В некоторых случаях, состояние ключа может не отражать состояние зажигания точно. Например, состоянием ключа может быть RUN (то есть, ключ находится в замке зажигания в положении RUN), но зажигание может быть выключено. Поэтому, модуль 115 управления питанием может быть запрограммирован определять состояние зажигания независимо от состояния ключа, и наоборот.
Некоторые подсистемы транспортного средства, такие как внутренние и наружные фонари, информационно-развлекательная система, и т. д., могут оставаться включенными в течение ограниченного периода времени, даже если состоянием зажигания является OFF. Скорость транспортного средства, например, может определяться из контроллера, такого как контроллер силовой передачи, антиблокировочная тормозная система (ABS) или другие модуль/датчик (смотрите фиг. 2). Модуль 115 управления питанием может избирательно выдавать питание из аккумуляторной батареи 110 в одну или более подсистем транспортного средства на основании логически выведенных состояния зажигания и скорости транспортного средства. Например, если состоянием зажигания является OFF, но базовое транспортное средство 100 все еще движется (например, скорость транспортного средства находится выше предопределенного порогового значения), модуль 115 управления питанием может продолжать питать энергией определенные подсистемы транспортного средства, как подробнее описано ниже. Как только скорость транспортного средства упала ниже предопределенного порогового значения, однако, модуль 115 управления питанием может быть запрограммирован деактивировать одну или более из подсистем транспортного средства, которые остались включенными. Деактивация подсистем транспортного средства, например, может включать в себя отсоединение таких подсистем транспортного средства от аккумуляторной батареи 110, чтобы снимать питание. Если зажигание включается вновь до того, как скорость упала ниже предопределенного порогового значения, или если скорость находится ниже предопределенного порогового значения всего лишь в течение короткого периода времени, модуль 115 управления питанием может продолжать питать энергией подсистемы транспортного средства, как если бы зажигание никогда не выключалось.
Модуль 115 управления питанием может быть запрограммирован реализовывать ситуационную блокировку автоматики. Ситуационная блокировка автоматики может быть реализована, например, в ответ на пользовательский ввод или ситуацию, выявленную по сигналам датчиков. Примерные ситуационные блокировки автоматики могут включать в себя блокировку автоматики поставленного на стоянку транспортного средства, блокировку автоматики буксировки, блокировку автоматики режима сборки и блокировку автоматики дистанционного запуска. Ситуационная блокировка автоматики может изменять работу модуля 115 управления питанием. Например, ситуационная блокировка автоматики может побуждать модуль 115 управления питанием предоставлять определенным или всем подсистемам возможность выключаться в определенных обстоятельствах. При нормальной эксплуатации, модуль 115 управления питанием может питать энергией подсистемы транспортного средства, если зажигание выключилось непреднамеренно или неожиданно. При ситуационных блокировках автоматики, модуль 115 управления питанием может давать возможность или побуждать одну или более подсистем транспортного средства выключать питание, несмотря на состояние ключа и состояние зажигания.
Блокировка автоматики поставленного на стоянку транспортного средства может реализовываться, когда базовое транспортное средство 100 поставлено на стоянку, а зажигание выключено. Если базовое транспортное средство 100 начинает катиться, модуль 115 управления питанием может быть запрограммирован не питать энергией никакие подсистемы транспортного средства.
Блокировка автоматики буксировки может реализовываться, когда базовое транспортное средство 100 буксируется. В первом режиме блокировки автоматики буксировки, который может возникать, когда зажигание выключено, пассажиры не присутствуют в базовом транспортном средстве 100, и базовое транспортное средство 100 буксируется, модуль 115 управления питанием может быть запрограммирован не питать энергией никакие подсистемы транспортного средства. Второй режим блокировки автоматики буксировки может возникать, когда пассажир присутствует, и базовое транспортное средство 100 буксируется. Один из способов выявлять пассажира может включать в себя прием пользовательского ввода через пользовательское интерфейсное устройство или посредством вынуждения пользователя переводить зажигание в состояние RUN, или посредством датчика обнаружения пользователей. Так как пассажир находится в базовом транспортном средстве 100, модуль 115 управления питанием может питать энергией определенные подсистемы транспортного средства, такие как система устройств пассивной безопасности, система подушек безопасности, и т. д.
Блокировка автоматики режима сборки может реализовываться, когда базовое транспортное средство 100 движется в качестве части последовательности операций производства или ремонта. Поэтому, модуль 115 управления питанием может быть запрограммирован не питать энергией никакие подсистемы транспортного средства, когда базовое транспортное средство 100 проходит через последовательность операций производства или ремонта, которая побуждала бы базовое транспортное средство 100 перемещаться, в то время как зажигание выключено.
Блокировка автоматики дистанционного запуска может быть реализована, когда базовое транспортное средство 100 было запущено дистанционно. Дистанционный запуск может происходить, когда двигатель запускается с удаленного передатчика и без кого бы то ни было в базовом транспортном средстве 100 или ключа в зажигании. Когда реализуется блокировка автоматики дистанционного запуска, модуль 115 управления питанием может ограничивать некоторые подсистемы транспортного средства, такие как система выявления столкновений. Более того, модуль 115 управления питанием может быть запрограммирован деактивировать топливный насос после выявления столкновения, в то время как базовое транспортное средство 100 находится в режиме дистанционного запуска.
Модуль 115 управления питанием дополнительно может быть запрограммирован действовать в режиме диагностики. Когда в режиме диагностики, модуль 115 управления питанием может выдавать диагностическую информацию в одну или более подсистем транспортного средства. Диагностическая информация может выявляться во время загрузки и может быть основана на информации прекращения из предыдущего цикла ключа. Другими словами, диагностическая информация для конкретного цикла ключа может становиться имеющейся в распоряжении в следующем цикле ключа. Функциональные возможности модуля 115 управления питанием могут выявляться при прекращении цикла питания, поэтому, диагностическая информация может сообщаться в следующем цикле зажигания. Однако, если питания нет в распоряжении, когда запрошено, диагностическая информация может делаться имеющейся в распоряжении в течение текущего цикла зажигания. Модуль 115 управления питанием может хранить некоторое количество состояний расширенного режима для извлечения в более позднее время.
В режиме диагностики модуль 115 управления питанием может выдавать диагностическую информацию, например, в модуль 160 управления устройствами пассивной безопасности. Тракт Pass Thru может оцениваться до того, как модуль 115 управления питанием вводит в действие питание у модуля 160 управления устройствами пассивной безопасности, системы 165 классификации занимающих места людей или индикатора 170 выключения пассажирской подушки безопасности, делая диагностическую информацию имеющейся в распоряжении у модуля 160 управления устройствами пассивной безопасности в течение текущего цикла ключа. Однако, поскольку питаемый модулем 115 управления питанием тракт может оцениваться после того, как состояние зажигания изменяется на OFF, эта диагностическая информация для модуля 160 управления устройствами пассивной безопасности может задерживаться до следующего цикла ключа. Сообщение о неисправности в модуль 160 управления пассивными устройствами безопасности может выполняться, как изложено ниже. Может передаваться сигнал CAN, указывающий, выявил ли модуль 115 управления питанием неисправность по входам, выходам или сквозному прохождению. Сигнал CAN может пускаться в обращение, даже если модуль 160 управления устройствами пассивной безопасности может не быть способным принимать сигналы (например, модуль 160 управления устройствами пассивной безопасности не имеет питания или вышел из строя иным образом). Сигнал CAN из модуля 115 управления питанием, например, может включать в себя неисправность для обработки модулем 160 управления устройствами пассивной безопасности. Модуль 160 управления устройствами пассивной безопасности может передавать информацию о неисправности системы на комбинацию приборов с помощью сигналов CAN (например, сигнальную лампу подушки безопасности). Если сигнал из модуля 160 управления устройствами пассивной безопасности отсутствует, комбинация приборов может включать сигнальную лампу подушки безопасности.
Как правило со ссылкой на фиг. 2 и 3, линии, соединяющие компоненты, могут представлять собой передачу информации, питания или того и другого. Фиг. 2 - структурная схема примерного модуля 115 управления питанием и подсистем транспортного средства. Показанные подсистемы транспортного средства включают в себя модуль 130 управления трансмиссией, модуль 135 управления силовой передачей, тормозную систему 140, контроллер 145 комбинации приборов, информационно-развлекательную систему 150, модуль 155 управления кузовом, модуль 160 управления устройствами пассивной безопасности, систему 165 классификации занимающих места людей и индикатор 170 выключения пассажирской подушки безопасности. Другие подсистемы, не показанные, могут быть дополнительно включены в базовое транспортное средство 100 и работать в соответствии с модулем 115 управления питанием. Примеры других возможных подсистем, например, могут включать в себя подсистему рулевого управления с усилителем, подсистему дверей и окон с электроприводом. Модуль 115 управления питанием дополнительно может включать в себя устройство 125 обработки, как обсуждено выше со ссылкой на фиг. 1.
Модуль 130 управления трансмиссией может включать в себя любое вычислительное устройство, запрограммированное управлять работой трансмиссии транспортного средства. Модуль 135 управления силовой передачей может включать в себя любое вычислительное устройство, запрограммированное управлять работой одного или более компонентов силовой передачи транспортного средства. Тормозная система 140 может включать в себя любое вычислительное устройство, запрограммированное управлять работой тормозов транспортного средства. Контроллер 145 комбинации приборов может включать в себя любое вычислительное устройство, запрограммированное управлять работой компонентов комбинации приборов. Информационно-развлекательная система 150 может включать в себя любое вычислительное устройство и пользовательское интерфейсное устройство, например, запрограммированные выдавать мультимедийный контент занимающим места людям в транспортном средстве. Модуль 155 управления кузовом может включать в себя любое вычислительное устройство, запрограммированное управлять работой аккумуляторной батареи 110 транспортного средства. Модуль 160 управления устройствами пассивной безопасности может включать в себя любое вычислительное устройство, запрограммированное управлять работой системы устройств пассивной безопасности транспортного средства, в том числе, ремнями безопасности и подушками безопасности. Система 165 классификации занимающих места людей может включать в себя любое вычислительное устройство и датчики, запрограммированные выявлять и возможно идентифицировать одного или более занимающих места людей в транспортном средстве. Индикатор 170 выключения пассажирской подушки безопасности может включать в себя визуальный сигнал тревоги, например, который светится, чтобы указывать, выключена ли пассажирская подушка безопасности.
Устройство 125 обработки может принимать, в качестве входных сигналов, состояние зажигания и скорость транспортного средства, как обсуждено выше. Устройство 125 обработки может быть запрограммировано питать энергией одну или более из подсистем транспортного средства, если состоянием зажигания является выключенное, а скорость транспортного средства находится выше предопределенного порогового значения. Например, устройство 125 обработки может определять состояние зажигания по состоянию ключа. В качестве альтернативы, модуль 115 управления питанием может быть запрограммирован определять состояние зажигания независимо от состояния ключа, и наоборот, чтобы улаживать случаи, например, где состояние ключа не отражает точно рабочее состояние зажигания. Как показано на фиг. 2, устройство 125 обработки может быть запрограммировано давать команду модулю 155 управления кузовом выдавать питание на модуль 160 управления устройствами пассивной безопасности, систему 165 классификации занимающих места людей, индикатор 170 выключения пассажирской подушки безопасности, а также другие подсистемы транспортного средства, в то время как скорость транспортного средства находится выше предопределенного порогового значения. Если скорость транспортного средства падает ниже предопределенного порогового значения, устройство 125 обработки может быть запрограммировано деактивировать одну или более из этих подсистем транспортного средства. Деактивация подсистем транспортного средства, например, может включать в себя выдачу команды модулю 155 управления кузовом снимать питание с одной или более из подсистем транспортного средства.
Фиг. 3 - структурная схема модуля 115 управления питанием, включенного в модуль 155 управления кузовом. В этой примерной реализации, модуль 115 управления питанием действует в качестве «режима» в противоположность отдельному вычислительному устройству относительно модуля 155 управления кузовом. Модуль 115 управления питанием может быть, в качестве альтернативы или дополнительно, включен в любое количество из других подсистем или модулей управления транспортного средства.
Фиг. 4 - блок-схема последовательности 400 операций способа примерной последовательности операций, которая может выполняться модулем 115 управления питанием для выдачи питания в некоторые подсистемы транспортного средства при определенных обстоятельствах. Последовательность 400 операций может инициироваться, когда транспортное средство включено, и может продолжать выполняться до тех пор, пока транспортное средство не выключено и, например, ключ не вынут из замка зажигания.
На этапе 405 принятия решения блок-схемы, модуль 115 управления питанием может определять состояние зажигания транспортного средства. Например, устройство 125 обработки может определять, находится ли ключ в положении RUN в зажигании. Если так, последовательность 400 операций может переходить на этап 410 блок-схемы. Иначе, последовательность 400 операций может продолжать выполнять этап 405 блок-схемы до тех пор, пока состоянием зажигания не является RUN.
На этапе 410 блок-схемы, модуль 115 управления питанием может активировать действие одной или более подсистем транспортного средства. Активация подсистем транспортного средства может включать в себя питание энергией по меньшей мере одной из подсистем транспортного средства, например, посредством избирательного присоединения одной или более из подсистем транспортного средства к питанию от аккумуляторной батареи 110.
На этапе 415 блок-схемы, модуль 115 управления питанием может начинать контролировать скорость транспортного средства. Устройство 125 обработки может определять скорость транспортного средства, например, на основании сигналов, выпускаемых контроллером, таким как контроллер силовой передачи.
На этапе 420 принятия решения блок-схемы, модуль 115 управления питанием может повторно оценивать состояние зажигания транспортного средства. Более точно, устройство 125 обработки может определять, находится ли ключ в положении OFF или ACC. Если так, последовательность 400 операций может переходить на этап 420 принятия решения блок-схемы. Иначе, последовательность 400 операций может возвращаться на этап 415 блок-схемы.
На этапе 425 блок-схемы, модуль 115 управления питанием может деактивировать или иным образом предоставлять возможность выключаться одной или более подсистем транспортного средства. То есть, модуль 115 управления питанием через устройство 125 обработки может избирательно снимать питание у одной или более из подсистем транспортного средства.
На этапе 430 принятия решения блок-схемы, модуль 115 управления питанием может определять, существуют ли какие-нибудь ситуационные блокировки автоматики. Ситуационная блокировка автоматики может быть реализована, например, в ответ на пользовательский ввод или ситуацию, выявленную по сигналам датчиков. Примерные ситуационные блокировки автоматики могут включать в себя блокировку автоматики поставленного на стоянку транспортного средства, блокировку автоматики буксировки, блокировку автоматики режима сборки и блокировку автоматики дистанционного запуска. Разные ситуационные блокировки автоматики могут инициироваться в ответ на разные критерии или обстоятельства, как обсуждено выше. Кроме того, разные блокировки автоматики буксировки могут применяться, например, на основании того, присутствует ли кто-нибудь в базовом транспортном средстве 100. Таким образом, при условии, что существуют все другие критерии для реализации блокировки автоматики буксировки, первая блокировка автоматики буксировки, обсужденная выше, может быть реализована, если занимающий место человек присутствует в базовом транспортном средстве 100, в то время как вторая блокировка автоматики буксировки, обсужденная выше, может реализовываться, если занимающие места люди не присутствуют в базовом транспортном средстве 100. Если возникают ситуационные блокировки автоматики, последовательность 400 операций может переходить на этап 450 блок-схемы. Если ситуационные блокировки автоматики не возникают, последовательность 400 операций может переходить на этап 435 блок-схемы.
На этапе 435 принятия решения блок-схемы, модуль 115 управления питанием может повторно оценивать состояние зажигания транспортного средства. Например, устройство 125 обработки может определять, находится ли ключ в положении RUN в зажигании. Если так, последовательность 400 операций может возвращаться на этап 410 блок-схемы. Иначе, последовательность 400 операций может продолжаться на этапе 440 блок-схемы.
На этапе 440 блок-схемы, модуль 115 управления питанием может начинать контролировать скорость транспортного средства. Устройство 125 обработки может определять скорость транспортного средства, например, на основании сигналов, выпускаемых контроллером, таким как контроллер силовой передачи. Последовательность 400 операций может переходить на этап 445 принятия решения блок-схемы.
На этапе 445 принятия решения блок-схемы, модуль 115 управления питанием может определять, находится ли контролируемая скорость транспортного средства ниже предопределенного порогового значения в течение предопределенного времени. Например, устройство 125 обработки может сравнивать существующую скорость транспортного средства с предопределенным пороговым значением и определять, перемещается ли базовое транспортное средство 100 на скорости, меньшей, чем предопределенное пороговое значение, в течение большего, чем предопределенное, времени (например, 0,5 секунды). Если базовое транспортное средство 100 перемещалось ниже предопределенного порогового значения в течение большего, чем предопределенное, времени, последовательность 400 операций может переходить на этап 450 блок-схемы. Если базовое транспортное средство 100 перемещалось ниже предопределенного порогового значения в течение меньшего, чем предопределенное, времени, последовательность 400 операций может переходить на этап 435 блок-схемы.
На этапе 450 блок-схемы, модуль 115 управления питанием может деактивировать или иным образом предоставлять возможность выключаться одной или более подсистем транспортного средства. То есть, модуль 115 управления питанием через устройство 125 обработки может избирательно снимать питание у одной или более из подсистем транспортного средства, в том числе, любой одной или более подсистем транспортного средства, оставленных включенными после этапа 425 блок-схемы.
Фиг. 5 - примерный конечный автомат 500, показывающий возможные состояния модуля 115 управления питанием. Конечный автомат, например, может быть реализован устройством 125 обработки. В состоянии 505, устройство 125 обработки может быть запрограммировано выводить сигнал ON (включения), который побуждает аккумуляторную батарею 110 выдавать питание в одну или более подсистем транспортного средства. Состояние 510 может инициироваться в ответ на переключение состояния зажигания в положение OFF при условии, что не были инициированы никакие ситуационные блокировки автоматики. В состоянии 510, устройство 125 обработки может продолжать выводить сигнал ON. Состояние 515 может инициироваться из состояния 510, если только зажигание остается выключенным, и скорость транспортного средства падает ниже предопределенного порогового значения, а в некоторых случаях, как обсуждено выше, падает ниже предопределенного порогового значения на предопределенное время (например, 0,5 секунд). В состоянии 515, выход устройства 125 обработки может переключаться на сигнал OFF, например, который снимает питание аккумуляторной батареи с одной или более подсистем транспортного средства. Устройство 125 обработки может возвращаться в состояние 505 из состояния 515, например, если зажигание включается, или инициирована одна из ситуационных блокировок автоматики, таких как блокировка автоматики дистанционного запуска. Когда устройство 125 обработки переходит в состояние 505, выход устройства 125 обработки может переключаться с сигнала OFF на сигнал ON.
Если устройство 125 обработки модуля 115 управления питанием замерло бы, прекратило бы работу и/или блокировалось при выполнении последовательностей операций модуля 115 управления питанием, может происходить потеря питания у модуля 160 управления устройствами пассивной безопасности и системы 165 классификации занимающих места людей. Для предотвращения потери питания у этих модулей, может быть реализована примерная логическая схема 10 резервного питания по фиг. 6. Первый набор портов вывода устройства 125 обработки с возможностью связи присоединен к первому вентилю 14 ИЛИ наряду с двумя подтягивающими резисторами 24 и 26, которые присоединены с возможностью связи к источнику напряжения Vcc2 55. Термин «Vcc» в электронной схеме является наименованием положительного (плюсового) напряжения при использовании интегральных схем в проектировании электронных устройств.
Напряжение Vcc2 55 выдается полустабилизированным резервным источником 50 питания и описано ниже. Второй набор портов вывода устройства 125 обработки с возможностью связи присоединен ко второму вентилю 16 ИЛИ наряду с двумя подтягивающими резисторами 28 и 30, которые присоединены с возможностью связи к напряжению Vcc2 55. Подтягивающие резисторы 24, 26, 28, 30 гарантируют, что входы вентилей 14 и 16 ИЛИ подтянуты к высокому уровню (логической 1) в случае, если порты вывода устройства 125 обработки непреднамеренно переходят в режим третьего состояния (например, когда устройство обработки начинает сброс). Порты логических устройств, таких как устройство 125 обработки, могут допускать состояние с высоким импедансом в дополнение к логическим уровням 0 и 1, эффективно снимая свои выходные сигналы со схемы. Когда выходы находятся в режиме третьего состояния, их влияние на остальную схему устранено, и узел схемы будет «плавающим» между логическими уровнями 0 и 1, если другие элементы схемы не определяют его состояние. Если входы у вентилей 14 и 16 ИЛИ являются «плавающими», выход вентилей 14 и 16 ИЛИ будет нестабильным и находиться в неопределенном состоянии. Как обсуждено выше, подтягивающие резисторы 24, 26, 28, 30 гарантируют, что входы вентилей 14 и 16 ИЛИ подтянуты к высокому уровню (логической 1) в случае, если порты вывода устройства 125 обработки непреднамеренно переходят в режим третьего состояния.
Сигнал 32 Run является сигналом управления с активным высоким уровнем, когда базовое транспортное средство 100 включено, и с возможностью связи присоединен к первому входу третьего вентиля 18 ИЛИ. Устройство 125 обработки вырабатывает сигнал Extend_PWR 34 на порте вывода устройства 125 обработки и присоединено с возможностью связи к второму входу третьего вентиля 18 ИЛИ. Сигнал 34 Extend_PWR является активным высоким сигналом (логической 1) и указывает, что устройством 125 обработки было принято решение сохранять питание, подаваемое на модуль 160 управления устройствами пассивной безопасности и систему 165 классификации занимающих места людей, которые будут дополнительно обсуждены ниже.
Выход вентиля 14 ИЛИ и выход вентиля 18 ИЛИ с возможностью связи присоединены ко входам логического вентиля 20 И. Выход логического вентиля 16 ИЛИ и выход логического вентиля 18 ИЛИ с возможностью связи присоединены ко входам логического вентиля 22 И. Выход логического вентиля 20 И с возможностью связи присоединен к драйверу 36 модуля управления устройствами пассивной безопасности (RCM), а выход логического вентиля 22 И присоединен с возможностью связи к драйверу 38 датчика классификации занимающих места людей (OCS). Источник напряжения шины 40 питания (Power Bus) присоединен к драйверу 36 RCM и к драйверу 38 OCS. Выход драйвера 36 RCM является источником 42 напряжения RCM, который является источником питания для модуля 160 управления устройствами пассивной безопасности. Выход драйвера 38 OCS является источником 44 напряжения OCS, который является источником питания для системы 165 классификации занимающих места людей.
Драйвер 36 RCM и драйвер 38 OCS не должны включаться неопределенным образом или оставаться включенными в условиях закороченной нагрузки. Поэтому, устройство 125 обработки контролирует состояние нагрузки выходного драйвера и может выключать драйвер 36 RCM и драйвер 38 OCS. Однако, предоставление устройству 125 обработки возможности выключать драйверы создает режим неисправности, где блок 125 обработки может непреднамеренно деактивировать эти выходы.
Для предотвращения режима неисправности, порты A.1, B.1, A.2 и B.2 вывода устройства 125 обработки сначала конфигурируются в качестве входов посредством установки направления регистра направления передачи данных портов вывода. Затем, устройство 125 обработки предварительно загружает регистры данных портов всеми высокими логическими уровнями (1). Для выключения драйвера 36 RCM и драйвера 38 OCS, блок 125 обработки затем должен предпринять очевидные шаги. Например, для выключения драйвера 36 RCM, блок 125 обработки очевидно должен переключить установку регистра направления передачи данных порта A.1 с ввода на вывод. Затем, устройство 125 обработки будет переключать регистр данных порта A.1 с высокого логического уровня (1) на низкий логический уровень (0). Устройство 125 обработки затем будет переключать регистр направления передачи данных порта B.1 с ввода на вывод и переключать регистр данных порта B.1 с высокого логического уровня (1) на низкий логический уровень (0), побуждая выход вентиля 14 ИЛИ переходить на низкий логический уровень (0). Поскольку выход вентиля 14 И является входом в вентиль 20 И, выход вентиля 20 И будет переходить на низкий логический уровень (0) или будет оставаться на низком логическом уровне (0), выключая драйвер 36 RCM.
Для выключения драйвера 38 OCS, блок 125 обработки очевидно должен переключать установку регистра направления передачи данных порта A.2 с ввода на вывод. Затем, устройство 125 обработки будет переключать регистр данных порта A.2 с высокого логического уровня (1) на низкий логический уровень (0). Устройство 125 обработки затем будет переключать регистр направления передачи данных порта B.2 с ввода на вывод и переключать регистр данных порта B.2 с высокого логического уровня (1) на низкий логический уровень (0), побуждая выход вентиля 16 ИЛИ переходить на логический 0. Поскольку выход вентиля 16 И является входом в вентиль 22 И, выход вентиля 22 И будет переходить на низкий логический уровень (0) или будет оставаться на низком логическом уровне (0), выключая драйвер 38 OCS.
Первым входом вентиля 18 ИЛИ является сигнал 32 Run. Сигнал 32 Run выдается базовым транспортным средством 100, когда базовое транспортное средство 100 является работающим. Например, когда базовое транспортное средство 100 включено, высокий уровень (логическая 1) приложен ко входу вентиля 18 ИЛИ. Выход вентиля 18 ИЛИ в таком случае является высоким уровнем (логической 1), а вторые выходы вентилей 20 и 22 И являются высокими уровнями (логической 1). Выходы вентилей 20 и 22 И являются высокими уровнями (логической 1), и входы в драйвер 36 RCM и драйвер 38 OCS являются высокими уровнями (логической 1), активируя драйвер 36 RCM и драйвер 38 OCS. С активированными драйвером 36 RCM и драйвером 38 OCS, напряжению 40 шины питания в таком случае дана возможность передаваться через драйвер 36 RCM и драйвер 38 OCS, чтобы выдавать питание на модуль 160 управления устройствами пассивной безопасности и систему 165 классификации занимающих места людей.
Когда сигнал Run 32 является низким уровнем (логическим 0), сигнал Extend_PWR 34 должен быть высоким уровнем (логической 1), чтобы активировать драйвер 36 RCM и драйвер 38 OCS, хотя Run 32 является низким уровнем (логическим 0), как описано выше. Например, базовое транспортное средство 100 может непреднамеренно выключаться, в то время как базовое транспортное средство 100 двигалось быстрее, чем 4 км/ч (километров в час). Сигнал Run 32 был бы низким (логическим 0), устройство 125 обработки выявляло бы эту ситуацию и устанавливало бы Extend_PWR 34 на высокий уровень (логическую 1), таким образом, активируя драйвер 36 RCM и драйвер 38 OCS, а кроме того, активировать модуль 160 управления устройствами пассивной безопасности и систему 165 классификации занимающих места людей.
Далее, со ссылкой на фиг. 7, показан полустабилизированный резервный источник 50 питания. Напряжение 52 Run_Start_Power (RSP) является первым источником электропитания у модуля 115 управления питанием и активируется модулем 116 управления питанием или другим модулем управления, используемым для определения состояния зажигания, когда Run 32 активен. Второй источник электропитания является энергонезависимым напряжением 54 пять вольт (KA5V), которое имеется в распоряжении, когда модуль 115 управления питанием присоединен к аккумуляторной батарее или электрической системе базового транспортного средства, то есть, когда устройство 125 обработки имеет источник положительного напряжения 12 вольт и соответствующее заземление.
Резистор 56, транзистор 60, стабилитрон 58 и конденсатор 62 составляют схему 51 стабилизатора напряжения для стабилизации напряжения 52 RSP. Диод 64 и диод 66 формируют диодный вентиль 53 ИЛИ и будут предоставлять напряжению 52 RSP или KA5V 54 возможность становиться напряжением Vcc2 55. Например, если бы базовое транспортное средство 100 было непреднамеренно выключено, в то время как транспортное средство перемещалось, напряжение 52 RSP отсутствовало бы. Однако, KA5V 54 все еще присутствует, а потому, напряжение Vcc2 55 будет по-прежнему присутствовать и подавать питание на подтягивающие резисторы 24--30. Также могут использоваться другие стабилизаторы напряжения и/или топологии.
Вообще, описанные вычислительные системы и/или устройства могут применять любые из некоторого количества компьютерных операционных систем, в том числе, но не в качестве ограничения, версии и/или разновидности операционной системы Ford Sync®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle из Редвуд Шорез, штат Калифорния), операционной системы AIX UNIX, распространяемой International Business Machines из Армонка, штат Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемой компанией Apple из Купертино, штат Калифорния, OS Blackberry, распространяемой компанией Blackberry из Ватерлоо, Канада, и операционной системы Andriod, разработанной корпорацией Google и Open Handset Alliance. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, дорожный компьютер, блокнотный компьютер или карманный компьютер, или некоторые другие вычислительные систему и/или устройство.
Вычислительные устройства обычно включают в себя исполняемые компьютером инструкции, где инструкции могут быть приводимыми в исполнение одним или более вычислительных устройств, таких как перечисленные выше. Исполняемые компьютером инструкции могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™, C, C++, C#, Visual Basic, Java Script, Perl, PHP, и т. д. Вообще, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя, и т. д., и исполняет эти инструкции, тем самым, выполняя одну или более последовательностей операций, в том числе, одну или более из последовательностей операций, описанных в материалах настоящей заявки. Такие инструкции и другие данные могут храниться и передаваться с использованием многообразия компьютерно-читаемых носителей.
Компьютерно-читаемый носитель (также указываемый ссылкой как читаемый процессором носитель) включает в себя любой постоянный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут считываться компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители, например, могут включать в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители, например, могут включать в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут передаваться посредством одной или более сред передачи, в том числе, коаксиальных кабелей, медных проводов и волоконной оптики, в том числе, проводов, которые содержат системную шину, присоединенную к процессору компьютера. Обычные формы компьютерно-читаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
Базы данных, репозитории данных или другие хранилища данных, описанные в материалах настоящей заявки, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, в том числе, иерархическую базу данных, набор файлов в файловой системе, прикладную базу данных в пользовательском формате, систему управления реляционной базой данных (RDBMS), и т. д. Каждое такое хранилище данных обычно включено в вычислительное устройство, применяющее операционную систему компьютера, такую как упомянутые выше, и подвергается доступу через сеть любым одним или более из многообразия способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, хранимые в различных форматах. RDBMS обычно использует язык структурированных запросов (SQL) в дополнение к языку для создания, сохранения, редактирования и выполнения хранимых процедур, такому как язык PL/SQL, упомянутый выше.
В некоторых примерах, элементы системы могут быть реализованы в качестве компьютерно-читаемых инструкций (например, программного обеспечения) на одном или более вычислительных устройств (например, серверов, персональных компьютеров, и т. д.), хранимых на компьютерно-читаемых носителях, связанных с ними (например, дисках, устройствах памяти, и т. д.). Компьютерный программный продукт может содержать такие инструкции, хранимые на компьютерно-читаемых носителях, для выполнения функций, описанных в материалах настоящей заявки.
Что касается последовательностей операций, систем, способов, эвристических правил, и т. д., описанных в материалах настоящей заявки, следует понимать, что, хотя этапы таких последовательностей операций, и т. д., были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие последовательности операций могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящей заявки. Кроме того, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящей заявки, могли бы быть опущены. Другими словами, описания способов в материалах настоящей заявки предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться, с тем чтобы ограничивать формулу изобретения.
Соответственно, должно быть понятно, что вышеприведенное описание подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные чем предоставленные примеры, были бы очевидны по прочтению вышеприведенного описания. Объем не должен определяться со ссылкой на вышеприведенное описание, но взамен, должен определяться со ссылкой на прилагаемую формулу изобретения наряду с полным объемом эквивалентов, на которые дано право такой формуле изобретения. Ожидается и подразумевается, что будущие усовершенствования будут происходить в технологиях, обсужденных в материалах настоящей заявки, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. В целом, должно быть понятно, что заявка является допускающей модификацию и изменение.
Все термины, используемые в формуле изобретения, подразумеваются обусловленными своими обычными значениями в качестве понятных специалистам в данной области техники, описанных в материалах настоящей заявки, если в материалах настоящей заявки не приведено явное указание на иное. В частности, использование форм единственного числа, «упомянутый», и т. д., должно читаться излагающим один или более из указанных элементов, если пункт формулы изобретения не передает явное ограничение иначе.
Реферат предоставлен, чтобы дать читателю возможность быстро выяснить сущность технического изобретения. Он представлен на рассмотрение с пониманием, что он не будет использоваться для толкования или ограничения объема или значения пунктов формулы изобретения. В дополнение, в вышеизложенном Подробном описании, может быть видно, что различные признаки сгруппированы вместе в различных вариантах осуществления с целью упорядочения изобретения. Способ по изобретению не должен толковаться в качестве отражающего намерение, чтобы заявленные варианты осуществления требовали большего количества признаков, чем изложенные в прямой форме в каждом пункте формулы изобретения. Скорее, как отражает последующая формула изобретения, обладающий признаками изобретения объект заключается в менее чем всех признаках одиночного раскрытого варианта осуществления. Таким образом, нижеследующая формула изобретения настоящим включена в Подробное описание, причем, каждый пункт формулы изобретения полагается сам на себя в качестве отдельно заявленного объекта изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ ПИТАНИЕМ ДЛЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2720690C2 |
| КОМПЬЮТЕР И СПОСОБ УПРАВЛЕНИЯ ДАННЫМИ НОСИМОГО УСТРОЙСТВА ВО ВРЕМЯ ПРОИСШЕСТВИЯ | 2016 |
|
RU2713702C2 |
| Программно-технический комплекс контроля, управления и предиктивной диагностики технологического оборудования подъемно-транспортного механизма | 2021 |
|
RU2770052C1 |
| АВТОМОБИЛЬНОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 2010 |
|
RU2440256C2 |
| СИСТЕМА АДАПТИВНОГО ИНТЕРФЕЙСА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2682102C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2689638C2 |
| СПОСОБ УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНЫМИ ОРГАНАМИ ТРАНСПОРТНОГО СРЕДСТВА С ПРЕДОТВРАЩЕНИЕМ ЕГО УГОНА И СИСТЕМЫ ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА | 1995 |
|
RU2077999C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| ЗАЩИТА ОТ СБОЕВ В РАБОТЕ УСТРОЙСТВА, УСТАНАВЛИВАЕМОГО НА ГЛАЗ | 2015 |
|
RU2667693C2 |
| ДИАГНОСТИКА СИГНАЛОВ СВЯЗИ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ РАДИОПРИЕМНИКА | 2017 |
|
RU2684341C2 |
Изобретение относится к системе и способу для управления питанием транспортного средства (ТС). Система управления питанием ТС содержит модуль управления питанием, содержащий процессор. Процессор имеет регистр направления передачи данных (DDR), который включает в себя первый порт и логическую схему, соединенную с процессором и подсистемой ТС. Причем первый порт предварительно установлен в направление ввода. Причем процессор запрограммирован с возможностью определять состояние зажигания и скорость ТС. Если зажигание выключено и скорость находится выше предварительно определенного порогового значения, питание подается в подсистему ТС посредством логической схемы. Если зажигание выключено и скорость находится ниже предварительно определенного порогового значения, первый порт переключается в направление вывода для снимания питания с подсистемы ТС. Повышается безопасность при эксплуатации. 2 н. и 7 з.п. ф-лы, 7 ил.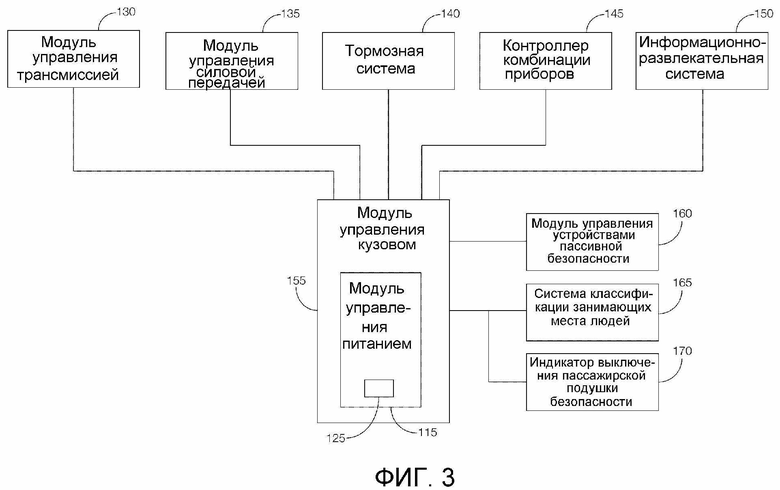
1. Система управления питанием транспортного средства, содержащая:
модуль управления питанием, содержащий процессор, имеющий регистр направления передачи данных (DDR), который включает в себя первый порт и логическую схему, соединенную с процессором и по меньшей мере одной подсистемой транспортного средства, причем первый порт предварительно установлен в направление ввода, причем процессор запрограммирован с возможностью:
определять состояние зажигания и скорость транспортного средства;
когда состояние зажигания является выключенным и скорость находится выше предварительно определенного порогового значения, подавать питание по меньшей мере в одну подсистему транспортного средства посредством логической схемы; и
когда состояние зажигания является выключенным и скорость находится ниже предварительно определенного порогового значения, переключать первый порт в направление вывода, чтобы снимать питание с по меньшей мере одной подсистемы транспортного средства.
2. Система по п. 1, в которой DDR включает в себя второй порт, который предварительно установлен в направление ввода, причем процессор дополнительно запрограммирован с возможностью: когда состояние зажигания является выключенным и скорость находится ниже предварительно определенного порогового значения, переключать второй порт в направление вывода, причем питание снимается с по меньшей мере одной подсистемы транспортного средства только тогда, когда оба из первого и второго портов переключены в направление вывода.
3. Система по п. 1, в которой логическая схема содержит схему регулировки питания, которая выполнена с возможностью поддерживать питание в по меньшей мере одну подсистему транспортного средства, когда состояние зажигания является выключенным.
4. Система по п. 1, в которой логическая схема содержит по меньшей мере один драйвер подсистемы транспортного средства, который способствует подаче питания по меньшей мере в одну подсистему транспортного средства, когда по меньшей мере один драйвер подсистемы транспортного средства включен, причем логическая схема выполнена с возможностью включения по меньшей мере одного драйвера подсистемы транспортного средства, когда первый порт находится в направлении ввода и когда процессор подает независимый сигнал управления, указывающий одно из следующего: состояние зажигания является включенным или скорость транспортного средства больше, чем предварительно определенное пороговое значение, в то время как состояние зажигания является выключенным.
5. Система по п. 4, в которой логическая схема содержит схему регулировки питания, которая переключаемым образом подает первое питание или второе питание по меньшей мере в один драйвер подсистемы транспортного средства, причем первое питание связано с первичным источником питания транспортного средства, при этом второе питание подается в упомянутый по меньшей мере один драйвер подсистемы транспортного средства в отсутствие первого питания.
6. Способ управления питанием транспортного средства, содержащий этапы, на которых:
определяют в процессоре модуля управления питанием в транспортном средстве состояние зажигания транспортного средства, причем процессор включает в себя регистр направления передачи данных (DDR) и соединен по меньшей мере с одной подсистемой транспортного средства;
определяют в процессоре скорость транспортного средства;
сравнивают в процессоре скорость с предварительно определенным пороговым значением;
когда состояние зажигания является выключенным и когда скорость находится выше предварительно определенного порогового значения, подают питание по меньшей мере в одну подсистему транспортного средства, и
когда состояние зажигания является выключенным и когда скорость находится ниже предварительно определенного порогового значения, переключают порт DDR из направления ввода в направление вывода, чтобы снимать питание по меньшей мере с одной подсистемы транспортного средства.
7. Способ по п. 6, причем DDR имеет множество портов, а способ дополнительно содержит переключение по меньшей мере двух из множества портов из направления ввода в направление вывода, чтобы снимать питание по меньшей мере с одной подсистемы транспортного средства.
8. Способ по п. 7, причем по меньшей мере два из множества портов находятся в направлении вывода одновременно.
9. Способ по п. 6, причем модуль управления питанием дополнительно содержит логическую схему, которая включает в себя схему регулировки питания, которая выполнена с возможностью переключаемым образом подавать первое питание или второе питание по меньшей мере в одну подсистему транспортного средства, когда порт DDR сконфигурирован в направлении ввода, причем первое питание связано с первичным источником питания транспортного средства, при этом второе питание подается в отсутствие первого питания.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 6223852 B1, 01.05.2001 | |||
| Ручная тележка, например, для отделочного текстильного производства | 1959 |
|
SU124317A1 |

