Область техники, к которой относится изобретение
Настоящее изобретение относится к радиолокационной системе транспортного средства, в частности, к диагностике радиолокационной системы автомобиля.
Уровень техники
Транспортное средство может включать в себя датчик обнаружения объектов вокруг транспортного средства. Датчик может представлять собой радиолокационную систему, которая посылает электромагнитную волну и принимает отраженный от объекта сигнал. На основании характеристик эхосигнала можно определить относительную скорость и расстояние до объекта. Для обеспечения правильной работы радиолокационное устройство должно быть способно передавать и принимать электромагнитный сигнал. В некоторых случаях происходит ослабление передаваемых и принимаемых сигналов. Ослабление сигналов радиолокационного устройства может быть вызвано наличием посторонних предметов или препятствий перед радиолокационным устройством. Например, работа радиолокационного устройства может быть нарушена из-за наличия грязи, льда или снега перед радиолокационным устройством. При данных условиях ослабление отраженных волн может привести к снижению измеренного уровня эхосигналов радиолокационного устройства. При низком уровне эхосигнала радиолокационного устройства система диагностики радиолокационного устройства может обнаруживать состояние отказа радиолокационного устройства и отключать соответствующие функции, связанные с работой радиолокационного устройства.
Раскрытие изобретения
Транспортное средство включает в себя датчик, выполненный с возможностью выдавать эхосигнал на основании сигнала, отраженного от внешнего объекта, и по крайней мере один контроллер. По крайней мере один контроллер выполнен с возможностью (i) выдавать сигнал о незаблокированном состоянии датчика в том случае, когда амплитуда эхосигнала больше заранее заданного значения, (ii) выдавать сигнал о заблокированном состоянии датчика в том случае, когда амплитуда меньше заранее заданного значения и имеются данные, указывающие на условия, при которых амплитуда должна быть больше заранее заданного значения, (iii) выдавать сигнал о неподтвержденном состоянии датчика в том случае, когда амплитуда меньше заранее заданного значения и имеются данные, указывающие на условия, при которых амплитуда должна быть меньше заранее заданного значения. Контроллер также может быть запрограммирован: (i) в ответ на выдачу сигнала о незаблокированном состоянии датчика управлять функцией, зависящей от эхосигнала, в нормальном (полном) режиме, (ii) в ответ на выдачу сигнала о заблокированном состоянии датчика управлять функцией в нерабочем режиме, (iii) в ответ на выдачу сигнала о неподтвержденном состоянии датчика управлять функцией в ограниченном режиме или нормальном режиме, или нерабочем режиме функции. Функция, использующая данные эхосигнала, может представлять собой функцию выдачи предупреждений о возможном столкновении, при этом для работы в ограниченном режиме функция выдачи предупреждений о возможном столкновении может использовать для обнаружения внешних объектов увеличенное пороговое значение. Ожидаемая амплитуда может быть меньше заранее заданного значения при обнаружении свободной области, в которой вокруг транспортного средства не будет внешних объектов, которые в противном случае могли бы привести к превышению заранее заданного значения амплитуды эхосигнала. К данным об условиях, при которых ожидаемая амплитуда должна быть меньше заранее заданного значения, можно отнести положение транспортного средства, информацию об интенсивности движения, изображения от камеры и (или) предыдущие наборы характеристик эхосигнала. К данным об условиях, при которых ожидаемая амплитуда должна быть больше заранее заданного значения, можно отнести температуру, состояние стеклообогревателя, состояние отопителя, управляющий сигнал для тормозной системы, неровность дорожной поверхности, индикация включения тормозной системы, изображения от камеры и положение транспортного средства.
Система обнаружения внешних объектов для транспортного средства включает в себя датчик, выполненный с возможностью обеспечивать эхосигнал на основании сигнала, отраженного от объекта, и по крайней мере один контроллер. По крайней мере один контроллер запрограммирован выдавать сигнал о неподтвержденном состоянии датчика в ответ на условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть меньше заранее заданного значения и фактическая амплитуда эхосигнала меньше заранее заданного значения. По крайней мере один контроллер также может быть запрограммирован принимать данные о местоположении транспортного средства, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть меньше заранее заданного значения, можно отнести ситуацию, когда предыдущий набор характеристик эхосигнала указывает на то, что амплитуда эхосигнала в данном месте меньше заранее заданного значения. По крайней мере один контроллер также может быть запрограммирован принимать данные об интенсивности движения, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть меньше заранее заданного значения, можно отнести ситуацию, когда информация об интенсивности движения указывает на то, что транспортное средство находится в свободной (мало загруженной) области.
Система обнаружения внешних объектов также может включать в себя камеру. По крайней мере один контроллер также может быть запрограммирован принимать изображения от камеры, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть меньше заранее заданного значения, можно отнести отсутствие объектов, которые могли бы привести к тому, что фактическая амплитуда эхосигнала превысила бы заранее заданное значение, на изображениях, принимаемых от камеры.
По крайней мере один контроллер также может быть запрограммирован выдавать сигнал о заблокированном состоянии датчика в ответ на обнаружение условий, указывающих на наличие льда и (или) снега, в то время как фактическая амплитуда эхосигнала меньше заранее заданного значения. По крайней мере один контроллер также может быть запрограммирован выдавать сигнал о заблокированном состоянии датчика в ответ на условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть больше заранее заданного значения, в то время как фактическая амплитуда эхосигнала меньше заранее заданного значения. По крайней мере один контроллер также может быть запрограммирован принимать информацию о задействовании управления тормозом, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть больше заранее заданного значения, можно отнести увеличение частоты задействования управления тормозом. По крайней мере один контроллер также может быть запрограммирован принимать данные о местоположении транспортного средства, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть больше заранее заданного значения, можно отнести наличие фактов торможения в области, которая считается свободной, на основании местоположения транспортного средства. Система обнаружения внешних объектов также может включать в себя камеру. По крайней мере один контроллер также может быть запрограммирован принимать изображения от камеры, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть больше заранее заданного значения, можно отнести обнаружение льда и снега на изображениях, принятых от камеры. По крайней мере один контроллер также может быть запрограммирован принимать информацию о неровностях дорожной поверхности, при этом к условиям, указывающим на то, что ожидаемая амплитуда эхосигнала должна быть больше заранее заданного значения, можно отнести изменение неровности дорожной поверхности.
Способ выявления блокировки датчика обнаружения объектов включает в себя прием эхосигнала, основанного на сигнале, отраженном от внешнего объекта, прием данных об ожидаемой амплитуде эхосигнала и блокирование контроллером индикации результатов диагностики наличия блокировки датчика, когда фактическая амплитуда эхосигнала и ожидаемая амплитуда эхосигнала меньше заранее заданного значения. Способ может включать в себя выдачу результатов диагностики наличия блокировки датчика, когда фактическая амплитуда эхосигнала меньше заранее заданного значения, а ожидаемая амплитуда эхосигнала должна быть больше заранее заданного значения. Способ может включать в себя управление функциями, зависящими от эхосигнала, на основании текущего результата диагностики наличия блокировки датчика. Способ может включать в себя индикацию выполнения диагностики наличия блокировки датчика для оператора.
Краткое описание чертежей
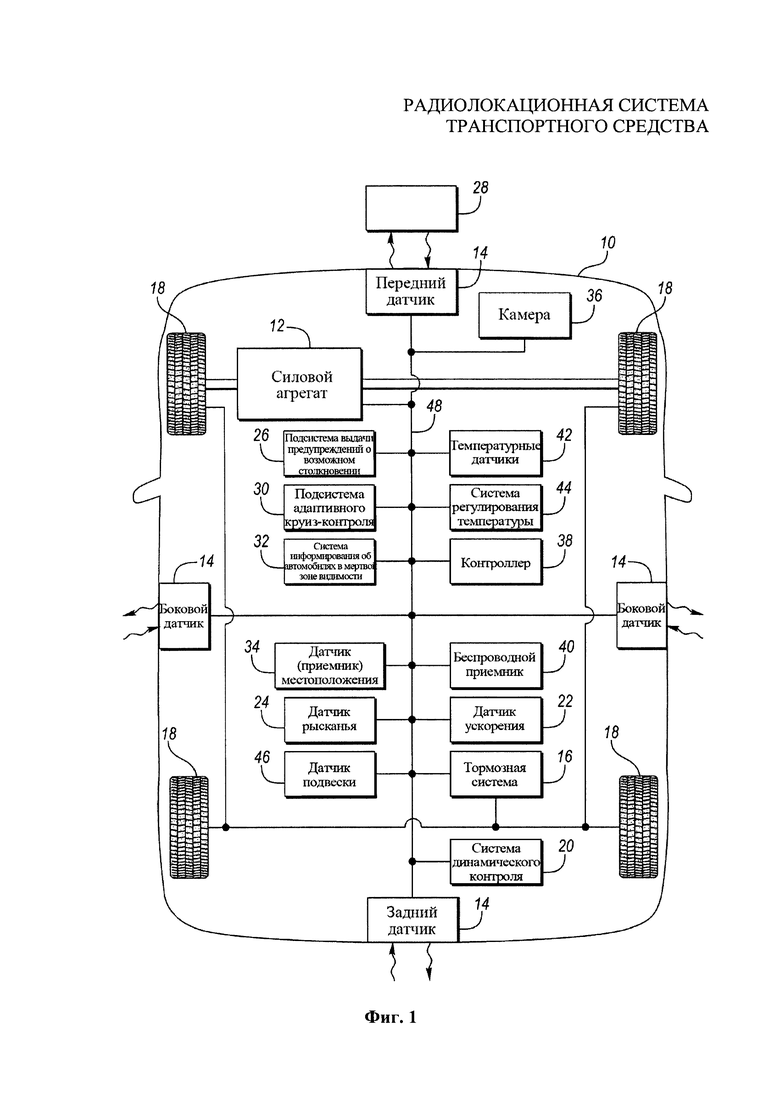
На фиг. 1 представлен пример конфигурации транспортного средства с различными функциональными функциями, включая одну или несколько систем обнаружения объектов.
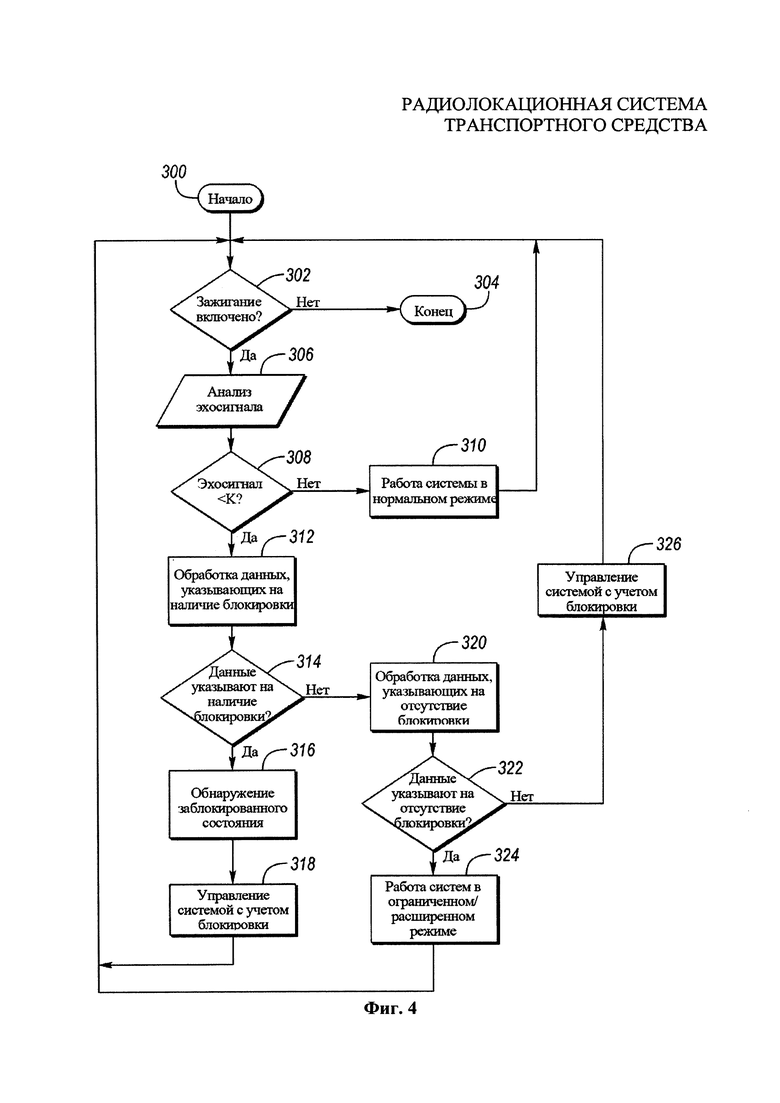
На фиг. 2 представлена упрощенная конфигурация радиолокационной системы.
На фиг. 3 представлен пример диаграммы возможных состояний функции диагностики для выявления блокировки системы обнаружения объектов.
На фиг. 4 представлена блок-схема, на которой изображены возможные этапы функции диагностики, выполняемые для выявления блокировки системы обнаружения объектов.
Осуществление изобретения
В настоящем документе рассмотрены различные варианты осуществления изобретения. Однако следует понимать, что раскрытые варианты осуществления являются только примерами и могут быть осуществлены в различных альтернативных формах. На чертежах необязательно соблюдается масштаб; некоторые отличительные особенности могут быть увеличены или уменьшены для более подробного изображения определенных деталей. Таким образом, описание конкретных конструктивных и функциональных деталей следует толковать не как ограничения, а как наглядные примеры для ознакомления специалистов в данной области техники с вариантами осуществления раскрытых в документе концепций. Специалисты в данной области техники должны понимать, что различные отличительные особенности, изображенные и описанные со ссылкой на один из сопроводительных чертежей, могут быть объединены с отличительными особенностями, изображенными на одном или нескольких других сопроводительных чертежах, для создания вариантов осуществления, не описанных и не изображенных в настоящем документе в явном виде. Изображенные сочетания отличительных особенностей представляют собой иллюстративные варианты осуществления для стандартных вариантов применения. Однако в некоторых вариантах применения или использования предпочтительным может быть использование других сочетаний и внесение изменений в отличительные особенности, соответствующих концепциям настоящего изобретения.
Транспортное средство 10 включает в себя силовой агрегат 12, от которого передается крутящий момент для обеспечения движения транспортного средства 10. Силовой агрегат 12 может представлять собой двигатель внутреннего сгорания, электрический привод или гибридный блок. Движущая сила может быть сгенерирована двигателем внутреннего сгорания и (или) одним или несколькими электрическими устройствами. Движущая сила может передаваться на ведущие колеса через трансмиссию, которая может являться частью силового агрегата 12.
Транспортное средство 10 может включать в себя одну или несколько систем или датчиков 14 для обнаружения внешних объектов 28 вокруг транспортного средства 10. Датчики 14 обнаружения внешних объектов могут быть расположены в разных местах транспортного средства (например, могут быть использованы передний датчик (датчики), боковой датчик (датчики) и задний датчик (датчики)). На фиг. 1 представлено несколько систем или датчиков 14 обнаружения объектов на передней, задней и боковых сторонах транспортного средства 10. Датчик 14 обнаружения внешних объектов может быть выполнен с возможностью выдавать эхосигнал на основании сигнала, отраженного от внешнего объекта 28.
Датчик 14 обнаружения внешних объектов может представлять собой радиолокационное устройство. На фиг. 2 представлена упрощенная схема радиолокационного устройства 100. Радиолокационное устройство 100 может включать в себя генератор 102, выполненный с возможностью генерировать электрический сигнал с определенной частотой и амплитудой. Сигнал может быть пропущен через ответвитель 104, выполненный с возможностью передавать часть мощности передатчика на смеситель 118 приемника. Электрический сигнал может быть направлен на передающую антенну 106, выполненную с возможностью излучать электромагнитную волну 108. Передаваемая волна может иметь определенную частоту (например, 77 ГГц, 24 ГГц). Электромагнитная волна 108 может распространяться от радиолокационного устройства.
Электромагнитная волна 108 может быть отражена от объекта 110, находящегося на пути электромагнитной волны 108. Амплитуда, частота и фаза отраженной электромагнитной волны 112 может зависеть от множества факторов. К данным факторам можно отнести эффективную площадь рассеяния отражающего объекта 110, уровень мощности передаваемого сигнала, расстояние между радиолокационным устройством 100 и отражающим объектом 110, свойства среды, в которой распространяется электромагнитная волна, и относительные скорости радиолокационного устройства и отражающего объекта 110. Датчик 100 может включать в себя приемную антенну 114 для приема отраженной электромагнитной волны 112. Отраженная электромагнитная волна 112 может быть преобразована в электрический сигнал 124. Электрический сигнал 124 может быть обработан с помощью малошумящего усилителя 116, выполненного с возможностью усиливать принимаемый сигнал. Усиленный сигнал 132 может быть подан на смеситель 118.
Смеситель 118 может быть выполнен с возможностью конвертировать принимаемый сигнал 132 с понижением частоты до уровня другого диапазона частот. Сигналы радиолокационного устройства могут представлять собой высокочастотные сигналы, в этом случае для обработки предпочтительной может быть их конвертация до более низких частот. Смеситель 118 может вычесть частоту передачи из частоты принимаемого сигнала 132, после чего останется только разность частот двух сигналов. Выходной сигнал 126 смесителя может представлять собой сигнал с частотой, характеризующей относительную скорость и расстояние от объекта 110 до радиолокационного устройства 100. Выходной сигнал 126 смесителя может быть пропущен через звено 120 фильтра, выполненное с возможностью фильтрации сигнала. Отфильтрованный сигнал 128 может быть направлен на контроллер 122.
Контроллер 122 может быть выполнен с возможностью считывать и обрабатывать отфильтрованный сигнал 128. Например, контроллер может включать в себя аналого-цифровой конвертер, который конвертирует отфильтрованный сигнал 128 в цифровое значение. Дискретизация отфильтрованного сигнала 128 может выполняться со скоростью, соответствующей ожидаемому диапазону частот сигнала.
На фиг. 2 представлено упрощенное изображение радиолокационной системы. Возможно использование более сложных радиолокационных систем, таким образом, описываемые технологии не ограничиваются определенной радиолокационной системой. Более того, некоторые компоненты, изображенные на фиг. 2, могут быть использованы не во всех вариантах применения.
Амплитуда и фаза электрического эхосигнала 124 могут изменяться в зависимости от изначально переданного сигнала. Для расчета расстояния от транспортного средства до объекта и относительной скорости между объектом и транспортным средством может быть выполнен анализ частоты и амплитуды эхосигнала 124. Эхосигнал 124 может изменяться в зависимости от наличия или отсутствия объектов 110 на пути радиолокационного устройства 100. При отсутствии на пути радиолокационного устройства на приемную антенну объектов отраженный сигнал может быть слабым или может отсутствовать. В этом случае амплитуда эхосигнала 124 может быть меньше порогового значения.
Контроллер 122 может обрабатывать эхосигнал 128 радиолокационного устройства. Для обработки эхосигнала радиолокационного устройства эхосигнал должен иметь достаточную амплитуду, чтобы его можно было отличить от шума. Контроллер 122 может обрабатывать эхосигнал 128 для проверки наличия различных объектов 110 на пути транспортного средства. После этого может быть выполнен расчет расстояния до объекта 110 и скорость объекта 110 относительно транспортного средства. Контроллер 122 может включать в себя энергонезависимое запоминающее устройство, на котором могут храниться ретроспективные данные, полученные от радиолокационного устройства.
Контроллер 122 может выполнять функции диагностики радиолокационной системы 100. Для обеспечения отсутствия противоречий между принимаемыми сигналами может быть выполнена проверка достоверности сигнала, принятого от радиолокационного устройства. Сигналы могут быть проанализированы на предмет наличия электрических проблем, таких как условия короткого замыкания на землю или короткого замыкания в цепи питания. При обнаружении подобной проблемы контроллер может менять режим работы системы в соответствии с обнаруженным состоянием. При обнаружении некоторых проблем соответствующие функции могут быть неактивны.
Для эффективной работы радиолокационного устройства 100 может потребоваться отсутствие препятствий перед передатчиком 106 и приемником 114 радиолокационного устройства. Наличие препятствий может привести к ослаблению передаваемого сигнала 108 и отраженного сигнала 112 радиолокационного устройства. Ослабление электромагнитных волн до уровня, при котором они не смогут предоставлять достоверные данные об окружающей среде, может быть вызвано наличием посторонних предметов или препятствий перед радиолокационным устройством 100. Например, работа радиолокационного устройства может быть нарушена из-за наличия грязи, льда или снега перед радиолокационным устройством. При данных условиях ослабление отраженных волн может привести к тому, что измеренный уровень эхосигналов радиолокационного устройства будет ниже заранее заданного порогового значения. Возможное пороговое значение может представлять собой уровень сигнала, которое меньше ожидаемого уровня помех, при котором эхосигнал невозможно отличить от сигнала шума. Например, эхосигнал 128, измеренный контроллером 122, может иметь амплитуду меньше заранее заданного значения. При блокировке радиолокационного устройства может понадобиться отключить функции, использующие данные сигнала радиолокационного устройства. Из-за невозможности получения достоверных данных сигнала радиолокационного устройства данный сигнал станет недостаточно надежным для функций управления или выдачи уведомлений. Индикатор диагностики может быть настроен на выдачу водителю предупреждений об обнаружении подобного условия.
Мониторинг эхосигнала радиолокационного устройства может быть использован для обнаружения блокировки радиолокационного устройства 100. Диагностика радиолокационного устройства может определять наличие блокировки на основании амплитуды эхосигналов радиолокационного устройства. В некоторых случаях слабый эхосигнал радиолокационного устройства может считаться нормальным. Например, это может относиться к ситуации, когда перед транспортным средством нет объектов, от которых сигналы радиолокационного устройства могли бы отразиться. В данной свободной области может происходить ложное обнаружение блокировки. Свободная область может представлять собой область со слабым эхосигналом радиолокационного устройства. Слабый эхосигнал радиолокационного устройства может быть обусловлен отсутствием объектов на пути транспортного средства, в результате чего сигнал практически не будет отражаться обратно на радиолокационное устройство 100. При обнаружении слабого эхосигнала радиолокационного устройства функция диагностики может определять, что радиолокационное устройство 100 не работает. После этого может быть выполнено отключение функций, использующих данные эхосигнала радиолокационного устройства. Однако слабый эхосигнал радиолокационного устройства в свободной области не всегда свидетельствует о наличии проблемы. Поскольку в свободной области эхосигналы радиолокационного устройства не должны генерироваться, обнаружение слабого сигнала радиолокационного устройства в свободной области не может быть использовано в качестве условия прохождения проверки. Подобные случаи ложного обнаружения являются нежелательными, поскольку некоторые компоненты будут неактивны, когда модуль абсолютно исправен.
Желательно исключить или снизить вероятность ложного обнаружения из-за слабых эхосигналов радиолокационного устройства. Снижение случаев ложного обнаружения может быть достигнуто за счет мониторинга сигналов, отличных от эхосигнала радиолокационного устройства для обнаружения движения в свободной области. Для отслеживания движения в свободной области могут быть использованы выходные сигналы от других модулей транспортного средства. Мониторинг данных дополнительных сигналов может использоваться для выявления свободной области вокруг транспортного средства. На основании данных сигналов можно определить ожидаемую амплитуду эхосигнала. Ожидаемая амплитуда эхосигнала может представлять собой ожидаемый уровень сигнала. Ожидаемая амплитуда эхосигнала также может быть выражена в виде двоичного сигнала, имеющего одно состояние, когда ожидаемая амплитуда больше заранее заданного значения, и другое состояние, когда она меньше заранее заданного значения. Обнаружение блокировки датчика может быть основано на ожидаемой амплитуде эхосигнала и фактической амплитуде эхосигнала.
На фиг. 1 показано, что транспортное средство 10 может включать в себя один или несколько контроллеров, выполняющих различные функции. Каждый контроллер может быть подключен к одной или нескольким сетям 48 связи транспортного средства. Обмен данными между контроллерами может осуществляться по линии последовательной передачи данных (по локальной сети контроллеров - CAN) или через дискретные каналы связи между контроллерами. На фиг. 1 изображена сеть 48 связи. В качестве альтернативы сеть 48 связи транспортного средства может состоять из нескольких сетей меньшего размера. Эхосигнал или данные, полученные на основании эхосигнала, могут быть использованы в различных системах транспортного средства и могут быть переданы по сети 48 связи. Эхосигнал радиолокационного устройства и соответствующие данные могут передаваться на другие контроллеры.
Транспортное средство 10 может включать в себя тормозную систему 16 для управления замедлением транспортного средства 0. Тормозная система 16 может включать в себя тормозное устройство на каждом колесе 18. Тормозная система 16 может включать в себя модуль для управления силой торможения на каждом отдельном колесе 18. Тормозная система 16 может быть гидравлической и (или) электрической. Например, стандартное транспортное средство с двигателем внутреннего сгорания может использовать гидравлическую тормозную систему, в которой сила торможения контролируется путем изменения гидравлического давления в тормозных устройствах. В соответствии с другим примером гибридное транспортное средство может включать в себя гидравлическую тормозную систему и также может использовать рекуперативное торможение от электрического устройства.
При управлении система 20 динамического контроля транспортного средства (VDC) может взаимодействовать с силовым агрегатом 12 и тормозными системами 16. Система 20 динамического контроля транспортного средства может включать в себя антиблокировочную тормозную систему, которая контролирует проскальзывание колес во время торможения. Система 20 динамического контроля транспортного средства может включать в себя противобуксовочную тормозную функцию, которая ограничивает проскальзывание колес во время ускорения. Система 20 динамического контроля транспортного средства может включать в себя функцию поддержания курсовой устойчивости транспортного средства, которая контролирует направление движения на основании предпочтительного курса. Система 20 динамического контроля транспортного средства может принимать значения скорости вращения колес, угла поворота рулевого колеса, величины ускорения/замедления, поперечного ускорения и скорости рысканья транспортного средства. Датчик 22 ускорения и датчик 24 рысканья могут взаимодействовать с системой 20 динамического контроля транспортного средства.
Система 20 динамического контроля транспортного средства может обмениваться данными по сети 48 связи. Информация от системы 20 динамического контроля транспортного средства, отправляемая на другие модули, может включать в себя индикацию задействования тормозной системы, индикацию задействования системы управления двигателем, а также значения скорости транспортного средства, скоростей вращения колес, ускорения, скорости рысканья и состояния нажатия педали тормоза.
Функция 26 выдачи предупреждений о возможном столкновении (FCW) может использовать сигналы, основанные на эхосигнале системы обнаружения объектов для предупреждения водителя о возможном столкновении с объектом 28. Для выдачи предупреждений функция 26 выдачи предупреждений о возможном столкновении может использовать информацию о расстоянии и скорости, полученную с помощью эхосигнала. Функция 26 выдачи предупреждений о возможном столкновении может выдавать визуальное или звуковое предупреждение, когда расстояние между транспортным средством 10 и объектом 28, находящимся на пути транспортного средства, меньше заранее заданного расстояния. Для уменьшения последствий столкновения при выявлении вероятного столкновения система может обмениваться данными с тормозной системой 16 и управлять включением тормозов.
Функция 30 адаптивного круиз-контроля (АСС) может использовать сигналы, основанные на эхосигнале, для поддержания определенной дистанции между транспортным средством 10 и другим транспортным средством. Эхосигнал может быть использован для управления силовым агрегатом 12 таким образом, чтобы транспортное средство 10 сохраняло постоянную скорость или постоянную дистанцию следования. Изменение дистанции может выполняться путем управления силовым агрегатом 12 или тормозной системой 16, соответственно.
Транспортное средство 10 может включать в себя систему 32 информирования о наличии автомобилей в «слепой» (или «мертвой») зоне видимости (BLIS). Система 31 информирования о наличии автомобилей в «слепой» зоне видимости уведомляет водителя о наличии транспортных средств или объектов в «слепой» зоне видимости водителя. «Слепые» зоны видимости представляют собой области, которые не видны через зеркала, или области, закрываемые частями транспортного средства. Система 31 информирования о наличии автомобилей в «слепой» зоне видимости может выдавать визуальное или звуковое предупреждение об обнаружении объектов в «слепой» зоне видимости. Система 31 информирования о наличии автомобилей в «слепой» зоне видимости может обмениваться данными с датчиками обнаружения объектов сбоку и сзади от транспортного средства 10. Система 31 информирования о наличии автомобилей в «слепой» зоне видимости может выдавать сигнал, свидетельствующий о наличии и указывающий местоположение объектов за транспортным средством. В соответствии с одним примером визуальный индикатор может быть установлен в боковом зеркале заднего вида транспортного средства. Система 31 информирования о наличии автомобилей в «слепой» зоне видимости может использовать дополнительные радиолокационные устройства или устройства 14 обнаружения объектов.
Транспортное средство 10 может включать в себя датчик (приемник) 34 определения местоположения транспортного средства, который может выдавать информацию о местоположении другим системам. Например, датчик 34 определения местоположения может представлять собой систему глобального позиционирования (GPS), которая передает местоположение транспортного средства. GPS принимает сигналы от спутников и обрабатывает данные сигналы для проверки положения приемника GPS. Что касается датчика 34 местоположения, транспортное средство 10 может включать в себя навигационную функцию, которая использует информацию о местоположении для навигации и управления. Навигационная функция может включать в себя библиотеку карт и информацию о маршруте. Навигационная функция может включать в себя дисплей для отображения текущего местоположения на карте.
Транспортное средство 10 может включать в себя одну или несколько камер 36, используемых для обнаружения объектов на пути транспортного средства 10. Изображения от камеры 36 могут обрабатываться контроллером 38 для проверки наличия объектов 28 и определения расстояния от транспортного средства 10 до объектов 28. Изображения, формируемые камерой 36, могут быть обработаны контроллером 38. Например, камера 36 может быть использована в системе слежения за дорожной разметкой, которая будет контролировать изображения и определять, не пересекает ли транспортное средство 10 границы определенной полосы движения. Изображения от камеры также могут быть использованы для проверки наличия снега или льда вокруг транспортного средства. Например, камера может быть установлена в пассажирском салоне и направлена на лобовое стекло. Изображения от камеры могут быть обработаны для того, чтобы определить условия видимости через лобовое стекло и обнаружить наличие грязи, ухудшающей видимость.
Транспортное средство 10 может включать в себя один или несколько беспроводных приемников 40. Беспроводной приемник 40 может представлять собой радиосистему, включая AM/FM-радио или спутниковое радио. Кроме того, беспроводной приемник 40 может представлять собой сотовую систему передачи данных или систему телефонной связи. Беспроводной приемник 40 может быть способен принимать данные об интенсивности движения и о погоде. Информация об интенсивности движения может содержать данные, характеризующие плотность движения в текущем месте и вокруг него. Информация об интенсивности движения может относиться ко всему запланированному маршруту транспортного средства. Информация об интенсивности движения может включать в себя список мест, в которых скорость движения транспортного потока ниже заранее заданного значения.
Транспортное средство может включать в себя один или несколько температурных датчиков 42. Температурные датчики 42 могут быть связаны с другими функциями. Данные о температуре могут быть доступны по сети 48 связи транспортного средства. Транспортное средство может включать в себя систему 44 регулирования температуры. Система 44 регулирования температуры может взаимодействовать с различными компонентами системы обогрева и охлаждения транспортного средства. Система 44 регулирования температуры может управлять температурными условиями в пассажирском салоне. Компоненты системы обогрева и охлаждения могут включать в себя стеклообогреватели окон и устройства отопления и охлаждения салона. Система 44 регулирования температуры также может управлять обогревом аккумулятора и силового агрегата. Система 44 регулирования температуры может передавать данные о состоянии устройства обогрева стекол и системы отопления/охлаждении по сети 48 связи.
Транспортное средство также может включать в себя систему 46 управления подвеской. Система 46 управления подвеской может управлять величиной дорожного просвета транспортного средства. Система 46 управления подвеской может включать в себя датчик высоты подвески, который измеряет величину прогиба подвески. Данная информация может быть использована для определения неровности дорожной поверхности. Система 46 управления подвеской может обрабатывать данные о подвеске для генерирования сигнала, характеризующего неровность дорожной поверхности.
Сигналы и данные от других модулей транспортного средства могут быть использованы для подтверждения блокировки датчика системы обнаружения объектов. При обнаружении небольшой амплитуды эхосигнала могут быть запрошены другие данные, позволяющие определить, указывают ли эти данные на наличие или отсутствие блокировки. Например, данные могут указывать на заблокированное состояние, когда амплитуда эхосигнала ниже заранее заданного порогового значения, в этом случае они будут свидетельствовать о блокировке датчика, В других ситуациях данные могут указывать на незаблокированное состояние, при этом обнаружение состояния блокировки датчика будет запрещено.
Одним из важных факторов является отсутствие препятствий в окружающей области. Отсутствие препятствий может быть выражено как количество объектов, от которых может быть отражен сигнал системы обнаружения объектов. Одним из признаков отсутствия препятствий может быть плотность движения. В области с высокой плотностью движения ожидаемыми могут быть высокие амплитуды эхосигналов радиолокационного устройства. При низкой или нулевой плотности движения может быть определено, что область является свободной. Плотность движения может быть подтверждена с помощью других модулей транспортного средства 10. Плотность движения может быть спрогнозирована с помощью системы 31 информирования о наличии автомобилей в «слепой» зоне видимости. Определение плотности движения может быть основано на обнаружении соседних транспортных средств с одной или обеих сторон от транспортного средства 10. Наличие объектов со всех сторон от транспортного средства 10 может указывать на высокую плотность движения. В области с высокой плотностью движения ожидаемая амплитуда эхосигнала может превышать пороговое значение для слабого эхосигнала.
Для определения отсутствия препятствий и плотности движения может быть использована информация об интенсивности движения, получаемая в режиме реального времени от измерительных устройств, использующих объекты инфраструктуры. Используя беспроводной приемник 40, транспортное средство 10 может принимать по беспроводному каналу связи транслируемое сообщение о плотности движения для определенной области, маршрута или пути движения. Сообщение, транслируемое по беспроводному каналу связи, может передаваться в виде радиосигналов или данных сотовых или спутниковых сигналов. Например, принимаемые транслируемые данные о высокой интенсивности движения в текущем местоположении транспортного средства могут быть использованы для подтверждения диагностированного состояния, основанного на слабом эхосигнале радиолокационного устройства. Обнаружение слабого эхосигнала радиолокационного устройства при высокой интенсивности движения может быть вызвано блокировкой радиолокационного устройства, а не ложным срабатыванием. При интенсивном движении ожидаемая амплитуда эхосигнала может превышать пороговое значение уровня для слабого эхосигнала.
Бортовая камера 36 также может быть использована для определения наличия препятствий и плотности движения. Камера 36 может быть направлена вперед и контролировать область перед транспортным средством 10. Для обнаружения объектов перед транспортным средством 10 может быть использована логика обработки видеоинформации, выполняющей роль эхосигналов радиолокационного устройства. Камера 36 может отправлять изображения на контроллер 38. Если на основании изображений от камеры контроллер 38 не сможет обнаружить объекты перед транспортным средством 10, то получение слабого эхосигнала радиолокационного устройства будет являться результатом движения в свободной области, а не состоянием блокировки.
Для определения наличия препятствий и плотности движения могут отслеживаться рабочие характеристики транспортного средства 10. Признаком высокой плотности движения могут быть многократные ускорения и замедления. Изменения величины рысканья транспортного средства могут указывать на выполнение маневров для объезда объектов на пути транспортного средства. Движение с высокой постоянной скоростью в течение длительного периода может указывать на наличие свободной области или на низкую плотность движения. Слабый эхосигнал радиолокационного устройства в данной ситуации может быть получен из-за отсутствия других транспортных средств в данной области.
На основании данных о местоположении транспортного средства и предыдущего набора характеристик сигналов радиолокационного устройства можно получить дополнительную информацию. Наборы характеристик эхосигналов радиолокационного устройства могут контролироваться и сохраняться вместе с данными о местоположении транспортного средства. По истечении определенного времени можно сформировать предыдущий набор характеристик эхосигналов для определенных местоположений транспортного средства. Предыдущий набор характеристик эхосигналов может представлять собой сохраненное значение амплитуды эхосигнала для определенного местоположения транспортного средства. Предыдущий набор характеристик эхосигналов может представлять собой среднее значение амплитуд эхосигналов, полученных в разное время, когда транспортное средство проезжало определенное местоположение. Например, некоторые области могут быть сопоставлены с набором характеристик эхосигналов радиолокационного устройства, указывающим на отсутствие препятствий. При движении в такой области текущий сигнал радиолокационного устройства может быть сравнен с предыдущим набором характеристик эхосигналов радиолокационного устройства в этом месте. Если текущий сигнал радиолокационного устройства не противоречит предыдущему набору характеристик эхосигналов радиолокационного устройства, то скорее всего радиолокационное устройство работает исправно. Радиолокационное устройство может считаться незаблокированным при наличии сильного эхосигнала радиолокационного устройства для местоположения транспортного средства, в котором ранее был обнаружен слабый сигнал. Это может свидетельствовать о том, что сигнал радиолокационного устройства работает исправно.
В соответствии с другим примером предыдущие наборы характеристик радиолокационного устройства могут указывать на то, что для определенного местоположения транспортного средства установлен слабый эхосигнал радиолокационного устройства. Другими словами, ранее амплитуда эхосигнала в определенном местоположении транспортного средства всегда была меньше заранее заданного значения. Используя предыдущий набор характеристик эхосигнала радиолокационного устройства, при прохождении через такое место ожидаемым может быть слабый эхосигнал радиолокационного устройства. В данной ситуации, когда фактическая амплитуда эхосигнала радиолокационного устройства ниже заранее заданного значения, не нужно выдавать результат диагностики.
Любое событие, которое не включает в себя постоянно повторяющиеся наборы характеристик эхосигналов радиолокационного устройства, может подтверждать, что система обнаружения объектов не заблокирована. Например, используя предыдущий набор характеристик эхосигналов радиолокационного устройства для определенного местоположения транспортного средства, ожидаемым может быть слабый эхосигнал радиолокационного устройства. Во время последующего проезда транспортного средства через то же место событие, например, обнаружение транспортного средства или животного, которое может привести к значительному изменению предыдущего набора характеристик эхосигнала радиолокационного устройства, может быть использовано для подтверждения незаблокированного состояния радиолокационного устройства.
Также могут быть использованы внешние источники наборов характеристик эхосигналов известных радиолокационных устройств. Наборы характеристик эхосигналов радиолокационного устройства в определенных областях могут быть определены путем проезда тестового транспортного средства по данной области и сохранения результатов в базу данных. База данных может быть загружена на серийное транспортное средство или другим образом передана при необходимости и считана серийным транспортным средством при движении по определенной области. Библиотека базовых наборов характеристик эхосигналов радиолокационного устройства может быть использована для предварительного определения местонахождения свободных областей. Например, области, которые являются свободными, могут быть содержаться в информации, сохраненной для навигационной функции.
Хотя одни условия указывают на то, что датчик не заблокирован, другие условия могут подтверждать заблокированное состояние радиолокационного устройства. При внешних температурах, близких или меньших по сравнению с температурой замерзания воды, вероятность блокировки радиолокационного устройства будет выше. Хотя температура не является единственным фактором она может быть главным признаком блокировки радиолокационного устройства. Наличие льда или снега также увеличивает вероятность блокировки радиолокационного устройства. Любые данные, указывающие на наличие льда и снега, могут быть использованы для подтверждения того, что низкий уровень эхосигнала радиолокационного устройства вызван блокировкой датчика.
На вероятность блокировки датчика могут указывать другие сигналы, вводимые водителем. Использование устройств обогрева стекол или отопителей может указывать на увеличение вероятности блокировки датчика. Использование устройств обогрева стекол или отопителей в салоне транспортного средства может указывать на наличие льда и снега. Система может определять, когда работают системы обогрева/отопления.
Кроме того, на наличие льда и снега может указывать увеличение управляющего воздействия от системы 20 динамического контроля транспортного средства. Управляющие воздействия могут включать в себя задействование тормозной системы и системы управления двигателем. Задействование тормозной системы может представлять собой событие, в котором к одному или нескольким колесам прилагается сила торможения. Задействование системы управления двигателем может представлять собой событие, в котором изменяется выходная мощность двигателя. Сюда можно отнести увеличение частоты использования антиблокировочной тормозной системы или противобуксовочной тормозной системы. Увеличение количества событий использования системы 20 динамического контроля транспортного средства может указывать на наличие льда и снега, из-за которых возрастает вероятность блокировки радиолокационного устройства.
Кроме того, увеличение неровности дорожной поверхности также может указывать на наличие снега или льда. Накопление льда и снега на дороге может быть не связано с увеличением неровности дорожной поверхности. Система может контролировать местоположение транспортного средства и входные данные, характеризующие неровность дорожной поверхности. Входные сигналы, характеризующие неровность дорожной поверхности, могут быть получены от модуля подвески, контролирующего величину прогиба компонентов подвески. Кроме того, транспортное средство может включать в себя вибрационные датчики, контролирующие уровни вибрации в транспортном средстве. Данные о неровности дорожной поверхности могут быть сопоставлены с определенным местоположением транспортного средства и сохранены в виде ретроспективных данных.
Бортовая камера 36 может быть использована для обнаружения наличия льда или снега в поле зрения устройства до включения устройства обогрева стекол. Контроллер 38 может обрабатывать изображения от камеры 36 и определять с их помощью наличие льда или снега. Обнаружение наличия снега, льда или грязи камерой 36 увеличивает вероятность правильности обнаружения блокировки радиолокационного устройства.
Повторяющееся событие использования тормозов водителем в областях со слабым эхосигналом радиолокационного устройства, которые ранее считались свободными, может быть использовано для подтверждения заблокированного состояния. Результат обнаружения может быть подтвержден с помощью предыдущих сигналов радиолокационного устройства в определенном месте. Также может быть использована информация о местоположении транспортного средства. Например, на высокую интенсивность движения также может указывать включение тормозной системы на большом расстоянии от перекрестка. При данных условиях слабый эхосигнал радиолокационного устройства может указывать на блокировку радиолокационного устройства и правильность результатов диагностики.
Для мониторинга статуса состояния блокировки контроллер может использовать машину состояний. К возможным состояниям для обнаружения блокировки можно отнести неподтвержденное заблокированное состояние, подтвержденное заблокированное состояние, неподтвержденное незаблокированное состояние, подтвержденное незаблокированное состояние. Каждое состояние может иметь соответствующий режим работы радиолокационной системы и модулей, использующих данные от радиолокационной системы. Данные о выявлении состояния блокировки могут быть выданы другим функциям для их оповещения о состоянии системы обнаружения объектов. На фиг. 3 представлен пример диаграммы состояний для системы, описанной выше.
Система может находиться в подтвержденном незаблокированном состоянии 200. Подтвержденное незаблокированное состояние 200 может указывать на то, что эхосигнал радиолокационного устройства является нормальным (соответствующим). В данном состоянии система может работать исправно. Другими словами, эхосигнал может использоваться всеми функциями, использующими данные эхосигнала. Система может переходить из подтвержденного незаблокированного состояния 200 в неподтвержденное заблокированное состояние 202. Критерии 204 перехода из подтвержденного незаблокированного состояния в неподтвержденное заблокированное состояние могут представлять собой ситуацию, при которой амплитуда эхосигнала меньше заранее заданного порогового значения (обозначенного на фиг. 3 буквой К).
Неподтвержденное заблокированное состояние 202 может указывать на наличие слабого эхосигнала, когда блокировка датчика не была однозначно подтверждена. Возврат из неподтвержденного заблокированного состояния 202 в подтвержденное незаблокированное состояние 200 может происходить при выполнении критериев 206 перехода из подтвержденного заблокированного состояния в подтвержденное незаблокированное состояние. Критерии 206 перехода из подтвержденного заблокированного состояния в подтвержденное незаблокированное состояние могут представлять собой ситуацию, при которой амплитуда эхосигнала больше или равна заранее заданному значению. В качестве альтернативы к заранее заданному значению может быть добавлен определенный гистерезис, в результате чего переход 206 будет происходить в том случае, когда эхосигнал будет превышать сумму заранее заданного значения и величины гистерезиса. Гистерезис позволяет избежать возникновения состояния, вызванного быстрым изменением характеристик, когда эхосигнал примерно равен заранее заданному значению.
При неподтвержденном заблокированном состоянии 202 система может перейти в нерабочий режим. Нерабочий режим может временно оставаться активным до тех пор, пока состояние системы обнаружения объектов не будет окончательно подтверждено. Контроллер может выдавать статус эхосигнала другим модулям или функциям. Другие модули и функции могут использовать данный статус для изменения рабочих пороговых значений или режимов работы. Индикация неподтвержденного заблокированного состояния 202 может использоваться в качестве предупреждения для других модулей о том, что состояние блокировки датчика возможно, но еще не подтверждено.
Из неподтвержденного заблокированного состояния 202 может быть выполнен переход в подтвержденное заблокированное состояние 208. Критерием 210 перехода из неподтвержденного заблокированного состояния в подтвержденное заблокированное состояние может быть наличие данных, указывающих на условия, в которых амплитуда эхосигнала должна быть выше заранее заданного значения. Другими словами, это может происходить при условиях, подтверждающих обнаружение блокировки датчика. Для подтверждения диагноза блокировки датчика может быть использован любой из критериев, описанных выше. В подтвержденном заблокированном состоянии 208 система может находиться в нерабочем режиме и все ее функции, связанные с данными эхосигнала, будут неактивны. Также могут быть неактивны модули и функции, использующие данные эхосигнала. Результат диагностики может быть сохранен на запоминающем устройстве и с помощью индикатора диагностики водителю может быть выдано предупреждение.
Из неподтвержденного заблокированного состояния 202 система может перейти в неподтвержденное незаблокированное состояние 212. Критерием 216 перехода из неподтвержденного заблокированного состояния в неподтвержденное незаблокированное состояние может быть наличие данных, указывающих на условия, в которых амплитуда эхосигнала должна быть меньше заранее заданного значения. Другими словами, это может происходить при условиях, не подтверждающих обнаружение блокировки датчика. Для подтверждения диагноза незаблокированного состояния датчика может быть использован любой из критериев, описанных выше. В качестве примера можно привести работу транспортного средства, когда в месте, где ранее наблюдались слабые эхосигналы (например, ожидаемая амплитуда эхосигнала меньше заранее заданного порогового значения), фактическая амплитуда эхосигнала меньше заранее заданного порогового значения, что может подтверждать незаблокированное состояние датчика. В неподтвержденном незаблокированном состоянии 212 возможна работа в ограниченном/расширенном режиме. Модули и функции могут продолжать работать с измененной эффективностью до тех пор, пока блокировка датчика не будет окончательно подтверждена. В ограниченном режиме некоторые функции могут быть недоступны. Например, функция адаптивного круиз-контроля может быть недоступна при предположении, что датчик заблокирован. В соответствии с другим примером функция выдачи предупреждений о возможном столкновении может продолжать работать, однако для обнаружения объектов может использоваться более высокое пороговое значение.
Из неподтвержденного незаблокированного состояния 212 может быть выполнен переход в подтвержденное незаблокированное состояние 200. Критерии 218 перехода из неподтвержденного незаблокированного состояния в подтвержденное незаблокированное состояние могут представлять собой ситуацию, при которой амплитуда эхосигнала больше заранее заданного значения. Обнаружение превышения заранее заданного значения амплитуды эхосигнала может указывать на исправность радиолокационной системы. Из неподтвержденного незаблокированного состояния 212 система может вернуться в неподтвержденное заблокированное состояние 202. Критерием 214 перехода из неподтвержденного незаблокированного состояния в неподтвержденное заблокированное состояние может быть обнаружение данных о блокировке.
Следует отметить, что работа системы обнаружения, описанной выше, зависит от того, превышает ли фактическая амплитуда эхосигнала радиолокационного устройства заранее заданное пороговое значение. Другие радиолокационные системы могут использовать другие способы обнаружения блокировки радиолокационного датчика. Система обнаружения просто добавляется к данным типам систем. Обнаружение может быть запрещено, когда обнаружены признаки блокировки датчика, а другие входные сигналы указывают на то, что датчик должен вернуть сигнал, соответствующий заблокированному состоянию. Аналогичным образом для обнаружения условий, в которым может быть подтвержден сигнал от заблокированного датчика, можно использовать подтверждающие входные сигналы.
Система, описанная выше, может быть реализована в контроллере, использующем микропроцессор. На фиг. 4 представлена блок-схема возможного варианта описанного способа. Способ начинается на этапе 300, после чего на этапе 302 контроллер может обнаружить, было ли включено зажигание. Включение зажигания соответствует тому, что транспортное средство исправно и готово начать движение. Если зажигание не будет включено, система может завершить работу на этапе 304. После включения зажигания на этапе 306 система может начать анализировать эхосигнал системы обнаружения объектов. Потом на этапе 308 контроллер может сравнивать амплитуду эхосигнала с пороговым значением. Если амплитуда эхосигнала больше или равна пороговому значению, то на этапе 310 будет считаться, что эхосигнал является нормальным, а функции, использующие данные эхосигнала, могут работать в нормальном (полном) режиме.
Если амплитуда эхосигнала меньше порогового значения, это может указывать на наличие вероятности блокировки датчика. На этапе 312 контроллер может обработать данные, указывающие на наличие блокировки. К данным, указывающим на наличие блокировки, можно отнести условия, в которых ожидаемая амплитуда эхосигнала больше или равна пороговому значению. На этапе 314 контроллер может проверить, указывают ли данные на наличие блокировки. Если данные действительно указывают на наличие блокировки, то на этапе 316 контроллер может выявить состояние блокировки. Обнаружение состояния блокировки может включать в себя установку диагностического кода неисправности и оповещение водителя об этом состоянии. После этого контроллер может отключить функции, использующие данные эхосигнала, для предотвращения работы компонентов с использованием неправильных входных данных эхосигнала.
Если данные не подтверждают наличие заблокированного состояния, то на этапе 320 контроллер может обработать данные, указывающие на отсутствие блокировки. К данным, указывающим на отсутствие блокировки, можно отнести условия, в которых ожидаемая амплитуда эхосигнала меньше порогового значения. На этапе 322 контроллер может проверить, указывают ли данные на отсутствие блокировки. Если данные указывают на незаблокированное состояние, то на этапе 324 система может работать в ограниченном или расширенном режиме. Это может понадобиться, когда обнаружены признаки, указывающие на то, что датчик не заблокирован, но это не может быть подтверждено до тех пор, пока не будет обнаружен эхосигнал, превышающий пороговое значение. Ограниченный или расширенный режим работы может включать в себя нерабочий режим определенных функций, работу в нормальном режиме или работу в ограниченном режиме. Например, функция адаптивного круиз-контроля может быть неактивна в том случае, когда обнаружены признаки незаблокированного состояния датчика, но это еще не подтверждено. Для снижения чувствительности функция выдачи предупреждений о возможном столкновении может использовать повышенные пороговые значения обнаружения. Более того, предупреждение об использовании ограниченного или расширенного режима работы может быть выдано оператору с помощью сигнальной лампы или дисплея сообщений.
Если данные не указывают на незаблокированное состояние, то на этапе 326 система может управлять функциями, использующими данные эхосигнала, как в ситуации, когда датчик заблокирован. Подобная ситуация может возникать, когда данные не указывают однозначно на блокировку или указывают на возможное отсутствие блокировки. В данной ситуации функции, использующие данные эхосигнала, могут быть неактивны до тех пор, пока условия не изменятся. Предупреждение о выключенном состоянии может быть выдано оператору с помощью сигнальной лампы или дисплея сообщения.
Контроллер может непрерывно выполнять этапы, постоянно измеряя и проверяя эхосигнал. Контроллер также может сохранять данные о рабочем статусе эхосигнала на энергонезависимом запоминающем устройстве, чтобы данное состояние могло быть считано при последующем цикле зажигания.
Раскрытые в настоящем документе процедуры, способы или алгоритмы могут быть выполнены или реализованы при помощи устройства обработки, контроллера или компьютера, которые могут включать в себя любое существующее программируемое электронное устройство управления или специализированное электронное устройство управления. Аналогичным образом процедуры, способы или алгоритмы могут храниться в виде различных данных и инструкций, выполняемых контроллером или компьютером, включая, но не ограничиваясь этим, информацию, постоянно хранящуюся на носителях без возможности перезаписи, в т.ч. на постоянных запоминающих устройствах, и информацию, временно хранящуюся на носителях с возможностью перезаписи, в т.ч. на гибких дисках, магнитных лентах, компакт-дисках, оперативных запоминающих устройствах, а также других магнитных и оптических носителях. Процедуры, способы или алгоритмы также могут представлять собой программного объекта. В качестве альтернативы процедуры, способы или алгоритмы могут быть полностью или частично записаны с помощью соответствующих аппаратных компонентов, в т.ч. специализированных интегральных микросхем (ASIC), логических микросхем, программируемых пользователем (FPGA), конечных автоматов, контроллеров или других аппаратных компонентов или устройств, а также сочетания аппаратных, программных и микропрограммных компонентов.
Хотя выше приведены примеры вариантов осуществления, это не означает, что они описывают все возможные формы, ограниченные пунктами формулы изобретения. Приведенный текст используется исключительно для описания, а не для ограничения, следует понимать, что возможно внесение различных изменений без отступления от объема и сущности изобретения. Как было описано выше, отличительные особенности различных вариантов осуществления могут быть объединены для создания других вариантов осуществления, не описанных и не изображенных в явном виде. Хотя различные варианты осуществления могли быть описаны как предпочтительные или имеющие преимущества перед другими вариантами осуществления или вариантами применения, известными из уровня техники, по одному или нескольким выборочным параметрам, специалисты в данной области техники поймут, что одной или более отличительными особенностями или характеристиками можно пренебречь для достижения общих желательных характеристик изобретения, которые зависят от конкретного варианта применения или осуществления. Данные характеристики включают в себя стоимость, прочность, надежность, затраты за срок службы, пригодность к реализации, внешний вид, упаковку, размер, пригодность к применению, вес, технологичность, простота сборки и т.д. Таким образом, варианты осуществления, как минимум, являются предпочтительными по сравнению с другими вариантами осуществления или вариантами использования, известными из уровня техники, по одной или более характеристикам, не выходящим за пределы объема сущности изобретения и могут быть предпочтительными для конкретного варианта осуществления.


Изобретение относится к диагностике радиолокационной системы автомобиля. Технический результат заключается в обнаружении состояния отказа радиолокационного устройства и отключении соответствующих функций, связанных с его работой. Предложен контроллер, отслеживающий радиолокационную систему, который может выявлять блокировку радиолокационного устройства в том случае, когда амплитуда эхосигнала меньше порогового значения. В ответ может быть выполнена диагностика блокировки радиолокационного устройства. Контроллер может запретить выдачу результатов диагностики наличия блокировки радиолокационного устройства, когда другие данные указывают на то, что радиолокационный датчик не заблокирован. К таким данным относятся местоположение транспортного средства, информация об интенсивности движения, изображения от камеры, предыдущий набор характеристик эхосигналов радиолокационного устройства. Контроллер может подтвердить результаты диагностики наличия блокировки радиолокационного устройства, когда другие данные (температура, местоположение транспортного средства, неровность дорожной поверхности и др.) указывают на то, что радиолокационный датчик может быть заблокирован. Функции, использующие данные эхосигнала, могут работать на основании результатов диагностики блокировки радиолокационного устройства. 3 н. и 16 з.п. ф-лы, 4 ил.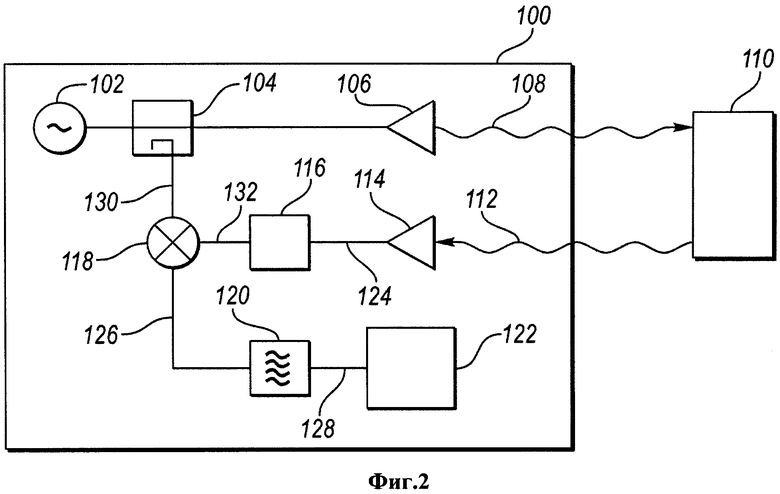
1. Транспортное средство, которое включает в себя:
датчик, выполненный с возможностью выдавать эхосигнал на основании сигнала, отраженного от внешнего объекта, и
по меньшей мере один контроллер, выполненный с возможностью (i) выдавать сигнал о подтвержденном незаблокированном состоянии датчика в ответ на то, что амплитуда эхосигнала больше заранее заданного значения, (ii) выдавать сигнал о подтвержденном заблокированном состоянии датчика в ответ на то, что амплитуда меньше упомянутого заранее заданного значения, при наличии данных, указывающих на условия, при которых ожидается, что амплитуда должна быть больше упомянутого заранее заданного значения, и (iii) выдавать сигнал о неподтвержденном незаблокированном состоянии датчика в ответ на то, что амплитуда меньше упомянутого заранее заданного значения, при наличии данных, указывающих условия, при которых ожидается, что амплитуда должна быть меньше упомянутого заранее заданного значения.
2. Транспортное средство по п. 1, в котором по меньшей мере один контроллер дополнительно запрограммирован с возможностью (i) в ответ на выдачу сигнала о подтвержденном незаблокированном состоянии датчика управлять функцией, зависящей от эхосигнала, в нормальном режиме, (ii) в ответ на выдачу сигнала о подтвержденном заблокированном состоянии датчика управлять функцией в нерабочем режиме, и (iii) в ответ на выдачу сигнала о неподтвержденном незаблокированном состоянии датчика управлять функцией в одном из ограниченного режима, нормального режима или нерабочего режима.
3. Транспортное средство по п. 2, в котором функция представляет собой функцию выдачи предупреждения о возможном столкновении, и причем функция выдачи предупреждения о возможном столкновении управляется в ограниченном режиме путем увеличения порогового значения обнаружения для внешних объектов.
4. Транспортное средство по п. 1, в котором ожидается, что амплитуда должна быть меньше упомянутого заранее заданного значения, при обнаружении свободной области, в которой транспортное средство управляется в отсутствии внешних объектов, которые могли бы привести к превышению упомянутого заранее заданного значения амплитудой эхосигнала.
5. Транспортное средство по п. 4, в котором данные, указывающие на условия, при которых ожидается, что амплитуда должна быть меньше упомянутого заранее заданного значения, включают в себя одно или более из положения транспортного средства, информации об интенсивности движения, изображений с камеры и предыдущих показаний эхосигнала.
6. Транспортное средство по п. 1, в котором данные, указывающие на условия, при которых ожидается, что амплитуда должна быть больше упомянутого заранее заданного значения, включают в себя одно или более из температуры, состояния стеклообогревателя, состояния отопителя, сигнала вмешательства в управление тормозами, неровности дорожной поверхности, индикации факта торможения, изображений с камеры и положения транспортного средства.
7. Система обнаружения внешних объектов для транспортного средства, которая включает в себя:
датчик, выполненный с возможностью выдавать эхосигнал на основании сигнала, отраженного от объекта, и
по меньшей мере один контроллер, запрограммированный с возможностью выдавать сигнал о неподтвержденном незаблокированном состоянии датчика в ответ на условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть меньше заранее заданного значения, при этом фактическая амплитуда эхосигнала меньше упомянутого заранее заданного значения.
8. Система обнаружения внешних объектов по п. 7, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать данные о местоположении транспортного средства, и причем условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть меньше упомянутого заранее заданного значения, включают в себя то, что предыдущее показание эхосигнала в текущем местоположении транспортного средства меньше упомянутого заранее заданного значения.
9. Система обнаружения внешних объектов по п. 8, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать информацию об интенсивности движения, и причем условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть меньше упомянутого заранее заданного значения, включают в себя информацию об интенсивности движения, которая указывает на свободную область в текущем местоположении транспортного средства.
10. Система обнаружения внешних объектов по п. 7, которая дополнительно включает в себя камеру, и причем по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать изображения с камеры, и причем условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть меньше упомянутого заранее заданного значения, включают в себя отсутствие объектов, которые могли бы привести к превышению упомянутого заранее заданного значения фактической амплитудой эхосигнала, на изображениях, принятых с камеры.
11. Система обнаружения внешних объектов по п. 7, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью выдавать сигнал о подтвержденном заблокированном состоянии датчика в ответ на условия, указывающие на наличие одного или более из льда и снега, в то время как фактическая амплитуда эхосигнала меньше упомянутого заранее заданного значения.
12. Система обнаружения внешних объектов по п. 7, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью выдавать сигнал о подтвержденном заблокированном состоянии датчика в ответ на условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть больше упомянутого заранее заданного значения, в то время как фактическая амплитуда эхосигнала меньше упомянутого заранее заданного значения.
13. Система обнаружения внешних объектов по п. 12, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать информацию о вмешательстве в управление тормозами, и при этом условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть больше упомянутого заранее заданного значения, включают в себя увеличение частоты фактов вмешательства в управление тормозами.
14. Система обнаружения внешних объектов по п. 12, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать данные о местоположении транспортного средства, и при этом условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть больше упомянутого заранее заданного значения, включают в себя факты торможения в ранее свободной области на основании местоположения транспортного средства.
15. Система обнаружения внешних объектов по п. 12, которая дополнительно включает в себя камеру, и причем по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать изображения с камеры, причем условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть больше упомянутого заранее заданного значения, включают в себя лед и снег на изображениях, принятых с камеры.
16. Система обнаружения внешних объектов по п. 12, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью принимать информацию о неровностях дорожной поверхности, при этом условия, указывающие на то, что ожидаемая амплитуда эхосигнала должна быть больше упомянутого заранее заданного значения, включают в себя изменение неровности дорожной поверхности.
17. Способ обнаружения блокировки датчика обнаружения объектов, содержащий этапы, на которых:
принимают эхосигнал на основе сигнала, отраженного от внешнего объекта;
принимают данные, указывающие ожидаемую амплитуду эхосигнала;
препятствуют, посредством контроллера, индикации диагностики наличия блокировки датчика в ответ на то, что и фактическая амплитуда эхосигнала, и ожидаемая амплитуда эхосигнала меньше заранее заданного значения; и
выдают, посредством контроллера, индикацию диагностики наличия блокировки датчика в ответ на то, что фактическая амплитуда эхосигнала меньше упомянутого заранее заданного значения, а ожидаемая амплитуда эхосигнала больше упомянутого заранее заданного значения.
18. Способ по п. 17, дополнительно содержащий этап, на котором управляют функциями, зависящими от эхосигнала, на основании текущего состояния диагностики наличия блокировки датчика.
19. Способ по п. 17, дополнительно содержащий этап, на котором совершают индикацию диагностики наличия блокировки датчика для оператора.
| US 2009243912 A1, 2009-10-01 | |||
| US 6469659 B1, 2002-10-22 | |||
| Устройство для имитации неисправностей ЭВМ | 1987 |
|
SU1529225A1 |
| US 2006227037 A1, 2006-10-12 | |||
| US 7397419 B2, 2008-07-08 | |||
| СПОСОБ КАЛИБРОВКИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2467346C1 |

