ОБЛАСТЬ ТЕХНИКИ
Заявленное решение относится к области электротехники и предназначено для определения углового положения ротора электродвигателей класса синхронных машин с обмоткой возбуждения.
УРОВЕНЬ ТЕХНИКИ
Из существующего уровня техники широко известны способы определения положения ротора для синхронных электродвигателей, построенные по принципам выделения ЭДС вращения электродвигателя или на базе инжекции (добавления/ввдения) в питающее напряжение или ток высокочастотного сигнала и вычислении магнитной анизотропии машины. Метод по противо-ЭДС применяется на средних и высоких скоростях. Метод на основе инжекции работает на низких скоростях, но точность измерения существенно зависит от нагрузки и режима работы электродвигателя. Кроме того, для синхронных машин с обмоткой возбуждения известны методы определения начального положения за счет инжекции в роторную обмотку [4].
Самосенсорные методы, основанные на инжекции, делятся на множество подклассов, таких как инжекция тока или инжекция напряжения. Инжекция напряжения, как наиболее часто использующаяся, в свою очередь делится на инжекцию пульсирующего сигнала и инжекцию вращающегося сигнала. Частота инжектируемого сигнала в большинстве случаев лежит в пределах от 300 Гц до 1 кГц или использует перебор состояний инвертора в процессе ШИМ и измеряет отклик в токе на каждое из состояний [1].
У вентильно-индукторного электродвигателя независимого возбуждения (ВИДНВ), подобно явнополюсной синхронной машине с обмоткой возбуждения, ротор имеет магнитную анизотропию. Поэтому инжекция высокочастотного сигнала в статорную обмотку приведет к возникновению отклика в форме токов статора и амплитуда отклика будет зависеть от углового положения ротора. Оценка углового положения осуществляется на одном периоде инжекции, поэтому данный метод реализуем только для низких скоростей. На высоких скоростях изменение угла за период инжекции оказывается значительным, поэтому при увеличении скорости система управления переключается на метод оценки по ЭДС вращения.
В [2] показано, как для асинхронного генератора с фазным ротором за счет инжекции сигнала в роторную обмотку и благодаря наличию индуктивной связи между статором и ротором можно по отклику в токе статора получить угловое положение ротора, однако данный метод применим только для асинхронных электродвигателей с фазным ротором.
Известны также различные решения, описанные в патентных источниках информации, которые направлены на определение положения ротора на средних или высоких скоростях с помощью инжекции сигнала в статорную обмотку. Например, такие решения описаны в источниках [3]-[5].
В качестве наиболее близкого аналога можно рассматривать источник [4], в котором описывается известный способ определения положения ротора с помощью инжекции в статорную обмотку и получении отклика также от статорной обмотки, что позволяет определить положение ротора на средних или высоких скоростях.
Таким образом, существенным недостатком известных из уровня техники решений является отсутствие способа достоверного и точного определения положения ротора электродвигателя класса синхронных машин с обмоткой возбуждения на нулевой и малых скоростях.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Решаемой технической проблемой заявленным решением является устранение недостатков, присущих существующим аналогам в данной области техники.
Техническим результатом является обеспечение высокоточного определения положения ротора электродвигателей класса синхронных машин с обмоткой возбуждения на нулевой и малых скоростях.
Заявленный способ реализуется с помощью выполнения этапов, на которых: осуществляют инжекцию высокочастотного сигнала в статорную обмотку; получают отклик сигнала от обмотки возбуждения;
сравнивают фазу инжектируемого сигнала и фазу отклика в обмотке возбуждения, разница которых определяет угловое положение ротора электродвигателя. В частном варианте реализации электродвигатель представляет собой вентильно-индукторный электродвигатель независимого возбуждения.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
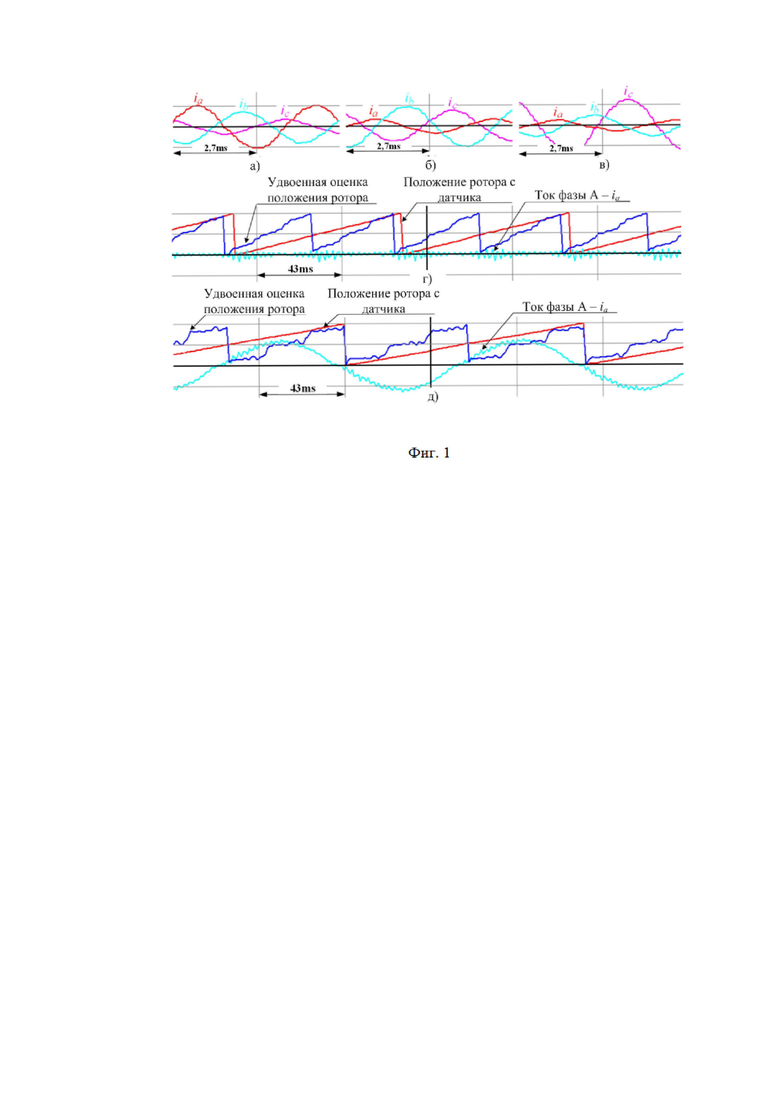
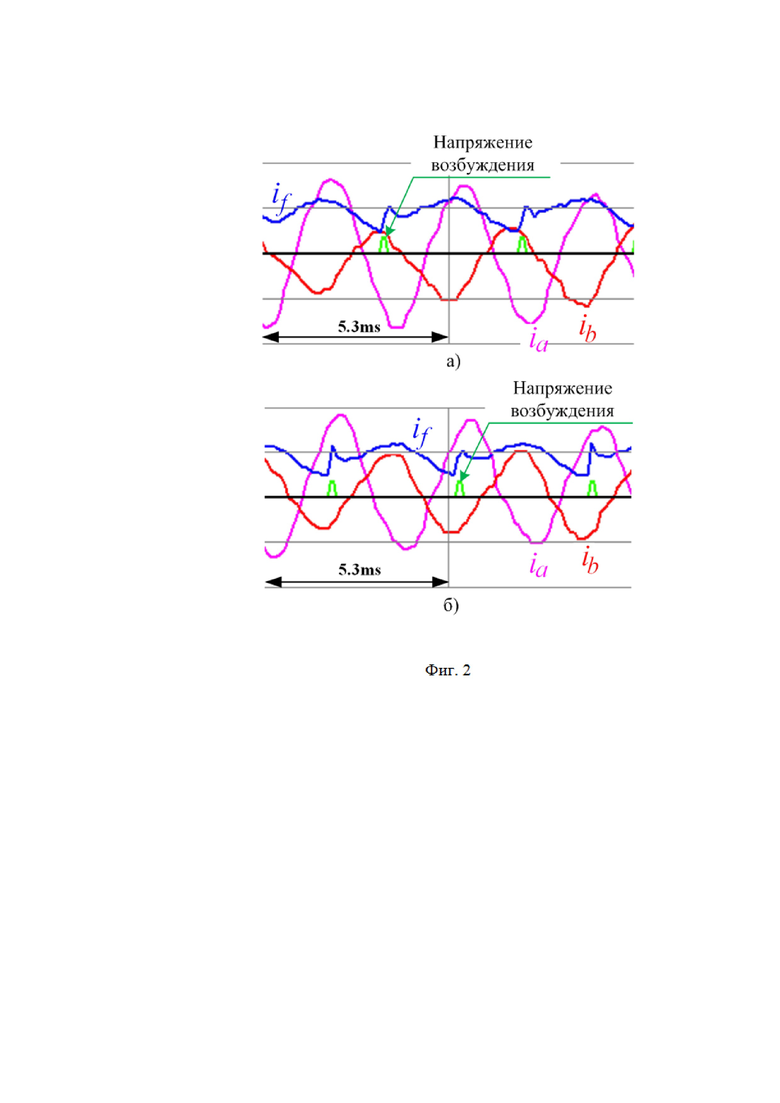
Фиг. 1 иллюстрирует оценку положения наблюдателем по отклику в токе статора. Фиг. 2 иллюстрирует отклик в токе обмотки возбуждения.
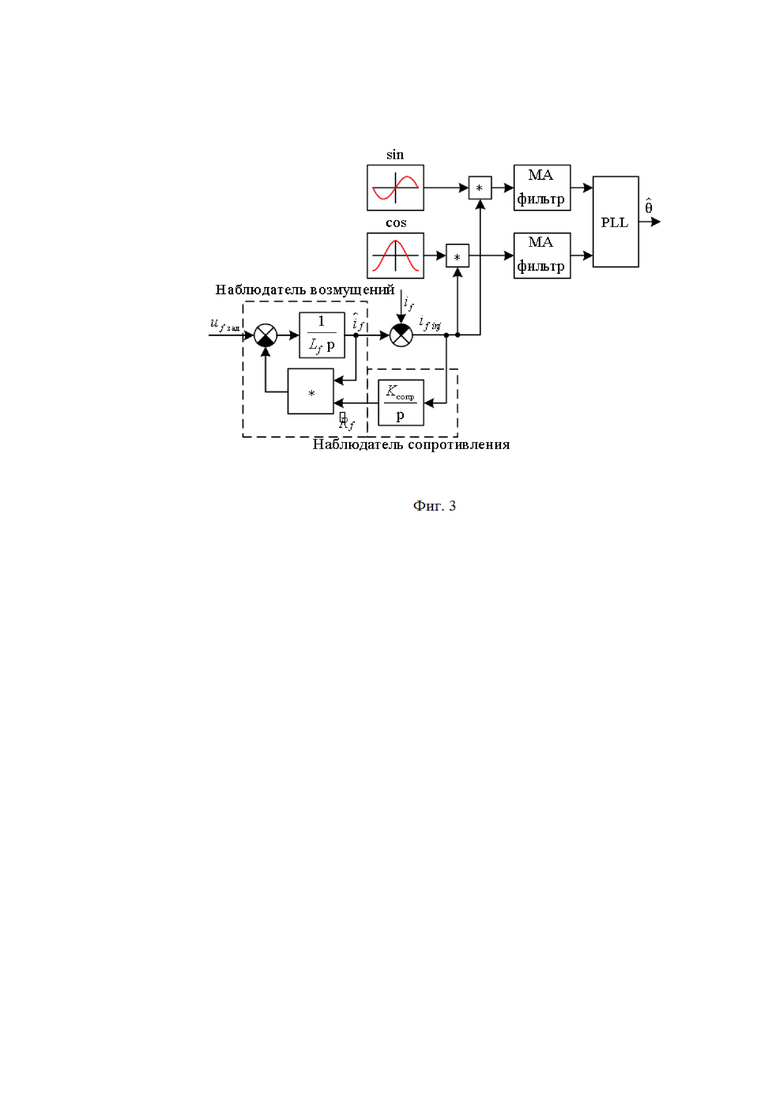
Фиг. 3 иллюстрирует структурную схему наблюдателя отклика в токе возбуждения.
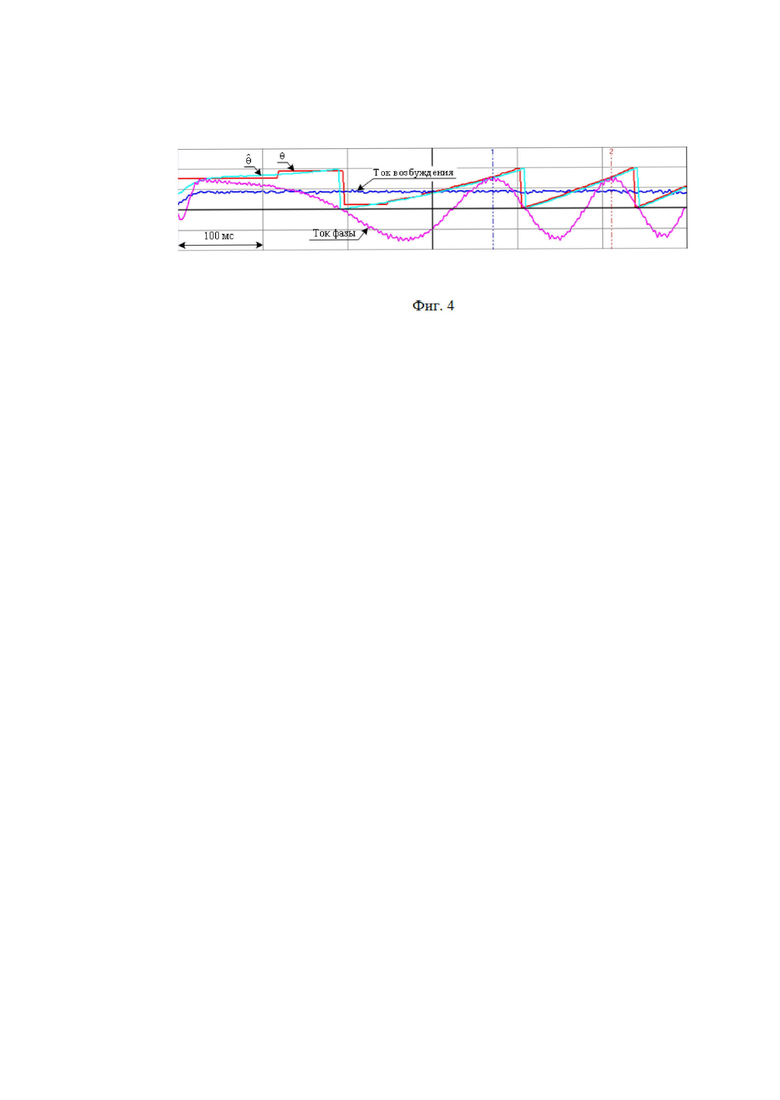
Фиг. 4 иллюстрирует определение углового положения ротора при пуске с наблюдателем по отклику в токе возбуждения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Вентильно-индукторный электродвигатель независимого возбуждения, имеет дополнительный канал для измерения - обмотка возбуждения, который также может быть использован для оценки положения. Если ввести высокочастотную инжекцию в статорные обмотки, то изменение тока продольной оси (направленной в направлении потока) приводит к изменению тока обмотки возбуждения при постоянстве потока по продольной оси. Соответственно инжекция в статорную обмотку наблюдаема в обмотке возбуждения. По разнице фаз между инжектируемым сигналом и наблюдаемым в обмотке возбуждения определяется угловое положение ротора. Пример реализации предлагаемого способа представлен ниже:
Ток обмотки возбуждения регулируется релейным регулятором. Если ток меньше заданного значения, то напряжение звена постоянного тока (ЗПТ) оказывается приложенным к обмотке возбуждения, иначе возникает короткое замыкание на обмотке, что эквивалентно приложению нулевого напряжения. Работа регулятора тока обмотки возбуждения одновременно с высокочастотной инжекцией в статорную обмотку для двух противоположных углов представлена на Фиг. 2. Отклики в токе обмотки возбуждения имеют одинаковую амплитуду, но разные фазы.
Ток в обмотке возбуждения содержит составляющую от работы релейного регулятора тока, которая вносит искажение в отклик от инжекции в статорные обмотки. Эти искажения могут быть устранены за счет наблюдателя возмущения, который должен предсказывать поведение тока в обмотке возбуждения в соответствии с сигналами управления, приходящими от релейного регулятора.
Структурная схема наблюдателя представлена на Фиг. 3. Она содержит интегратор, который замещает индуктивность обмотки возбуждения Lf. Прикладываемое напряжение за вычетом падения на активном сопротивлении обмотки  интегрируется, и вычисляется оценка тока обмотки возбуждения
интегрируется, и вычисляется оценка тока обмотки возбуждения  Из-за большого изменения температуры, сопротивление обмотки возбуждения в процессе работы электропривода меняется значительно, и разница между оценкой и измеренным значением используется чтобы скорректировать оценку сопротивления с помощью наблюдателя, представленного интегральным звеном с малым коэффициентом усиления Kсопр. Когда параметры модели соответствуют параметрам объекта, разница между измеренным и оцененным током представляет собой чистый отклик от инжектированного сигнала if inj.
Из-за большого изменения температуры, сопротивление обмотки возбуждения в процессе работы электропривода меняется значительно, и разница между оценкой и измеренным значением используется чтобы скорректировать оценку сопротивления с помощью наблюдателя, представленного интегральным звеном с малым коэффициентом усиления Kсопр. Когда параметры модели соответствуют параметрам объекта, разница между измеренным и оцененным током представляет собой чистый отклик от инжектированного сигнала if inj.
Отклик в токе обмотки возбуждения изменяет свою фазу в зависимости от положения ротора. Чтобы определить фазу сигнала, его умножают на синусоидальный и косинусоидальный сигналы, синфазные с сигналами инжекции в статор. Фильтр среднего скользящего имеет окно, равное периоду инжекции, и после него получаются синусоидальная и косинусоидальная компоненты углового положения. Эти два сигнала обрабатываются PLL-фильтром, который убирает шумы из выделенных сигналов. Таким образом, разница фаз инжектируемого сигнала и фазы отклика в обмотке возбуждения позволяет точно определить угловое положение ротора электродвигателя. На Фиг. 4 показана осциллограмма пуска ВИДНВ с разработанным наблюдателем положения. Точность восстановления положения проверялась с помощью ДПР на базе элементов Холла. Его сигнал интерполировался после некоторой минимальной скорости. Ошибка между восстановленным положением и измеренным мала и получаемый результат имеет высокую точность для работы системы векторного управления. Источники литературы:
1. Briz F., Degner M.W. Rotor Position Estimation // IEEE Industrial Electronics Magazine, 2011. Vol. 5, no. 2, P. 24-36.
2. Reigosa D.D., Briz F., Blanco C., Guerrero J.M. Sensorless Control of Doubly Fed Induction Generators Based on Stator High-Frequency Signal Injection. // IEEE Transactions on Industry Applications. 2014, Vol. 50, no. 5. - P. 3382-3391.
3. CN 107070345 A, BEIJING LEADER & HARVEST ELECTRIC TECH CO LTD, 18.08.2017.
4. US 20050184698 A1, Honeywell International Inc., 25.08.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный двигатель индукторного типа со встроенным магнитным редуктором | 2023 |
|
RU2818789C1 |
| Тихоходный вентильный двигатель индукторного типа со встроенным магнитным редуктором | 2021 |
|
RU2787007C1 |
| Индукторный ветрогенератор со встроенным магнитным редуктором | 2021 |
|
RU2774117C1 |
| Устройство для определения крутящего момента на валу синхронного электродвигателя | 1989 |
|
SU1719935A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ РОТОРА И/ИЛИ УГЛА РОТОРА РЕАКТИВНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ, УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, А ТАКЖЕ ПРИВОДНАЯ СИСТЕМА | 2015 |
|
RU2689117C2 |
| СОВМЕЩЕННЫЙ ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2309517C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2007 |
|
RU2376158C2 |
| БЕСКОНТАКТНАЯ ИНДУКТОРНАЯ ВЕНТИЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2277284C2 |
Изобретение относится к области электротехники и может быть использовано для определения углового положения ротора электродвигателей класса синхронных машин с обмоткой возбуждения. Техническим результатом является обеспечение высокоточного определения положения ротора электродвигателей класса синхронных машин с обмоткой возбуждения на нулевой и малых скоростях. Способ определения углового положения ротора электродвигателей класса синхронных машин с обмоткой возбуждения реализуется с помощью выполнения этапов, на которых осуществляют инжекцию высокочастотного сигнала в статорную обмотку, получают отклик сигнала от обмотки возбуждения, сравнивают фазу инжектируемого сигнала и фазу отклика в обмотке возбуждения, разница которых определяет угловое положение ротора электродвигателя. 1 з.п. ф-лы, 4 ил.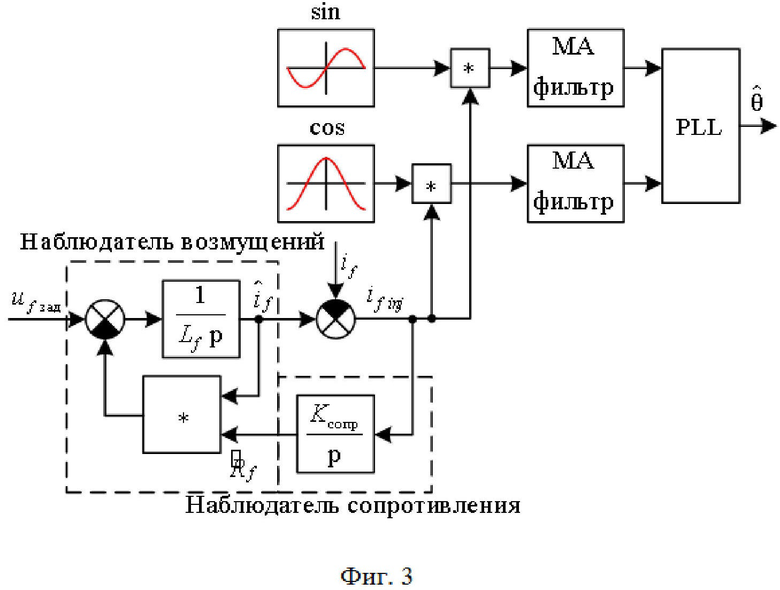
1. Способ определения углового положения ротора электрической машины переменного тока, содержащей статорную обмотку и обмотку возбуждения, включающий инжекцию высокочастотного сигнала в статорную обмотку, отличающийся тем, что
получают отклик сигнала от обмотки возбуждения, и
сравнивают фазу инжектируемого сигнала и фазу отклика в обмотке возбуждения, разница которых определяет угловое положение ротора электродвигателя.
2. Способ по п. 1, характеризующийся тем, что электродвигатель представляет собой вентильно-индукторный электродвигатель независимого возбуждения.
| ЛИЦИН К.В | |||
| и др., ВЫСОКОЧАСТОТНАЯ ИНЖЕКЦИЯ СИГНАЛОВ ПРИ БЕЗДАТЧИКОВОМ МЕТОДЕ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ДВИГАТЕЛЯ, Машиностроение: сетевой электронный научный журнал, 2013 N1, с.28-32 | |||
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| DE 102015218934 A1, 30.03.2017 | |||
| JP 2018078789 A, 17.05.2018 | |||
| US 5585709 A, 17.12.1996 | |||
| US 7045986 B2, | |||

