Данное изобретение относится к способу определения частоты ротора и/или угла ротора реактивной электрической машины. Кроме того, данное изобретение относится к управляющему устройству для вентильного преобразователя переменного тока реактивной электрической машины. Наконец, данное изобретение относится к приводной системе.
В данном случае интерес представляют реактивные электрические машины, в частности, синхронные реактивные электрические машины без демпферной беличьей клетки. Такие синхронные реактивные электрические машины без демпферной беличьей клетки имеют, если они работают от преобразователя частоты с ориентацией по полю, специально также в диапазоне частичной нагрузки, имеют очень хороший коэффициент полезного действия при одновременно высокой обеспечиваемой динамике. В противоположность асинхронным электрическим машинам, отсутствует мешающая динамическому уменьшению поля постоянная времени ротора, за счет чего синхронная реактивная электрическая машина обеспечивает преимущество чрезвычайно энергетически эффективной работы в диапазоне частичной нагрузки при уменьшающемся потоке, при одновременной быстрой магнетизации при требуемой высокой нагрузке. Преимущество относительно коэффициента полезного действия достигается с помощью реактивной электрической машины прежде всего за счет отсутствия потерь в роторе, поскольку он вращается стационарно синхронно с вращающимся полем статора и не имеет обмоток. По сравнению с синхронной машиной с возбуждением от постоянных магнитов интерес представляют, прежде всего, значительно меньшая стоимость изготовления, а также возможное уменьшение стоимости при защите вентильного преобразователя переменного тока.
Управляющие устройства, которые имеют, например, высокопроизводительные процессоры обработки сигналов, обеспечивают в настоящее время возможность моделирования характерных для реактивной электрической машины нелинейностей и выполнения сложных за счет этого алгоритмов. Не в последнюю очередь этим объясняется интерес промышленности к использованию преимуществ реактивной синхронной машины в подходящих применениях. Одной из предпочтительных областей применения являются, например, приводы для насосов или вентиляторов. Они работают, как правило, с регулированием скорости вращения и имеют длительный срок службы, за счет чего обеспечивается большой потенциал экономии энергии. Такие реактивные синхронные машины по соображениям стоимости в большинстве случаев выполняются без датчика, который может измерять скорость вращения и/или положение коммутации. В частности, в вентиляторах необходимо выполнять подключение к вращающейся реактивной синхронной машине, по существу форсировать привод, и возвращаться на заданную мощность подачи. При подключении к вращающейся реактивной синхронной машине необходимо вентильный преобразователь переменного тока устанавливать правильно относительно положения ротора по скорости вращения и по фазе. В противоположность синхронным машинам с возбуждением от постоянных магнитов, ротор состоит лишь из железа (и воздуха), за счет чего обычная оценка скорости вращения и фазы с помощью измерения электродвижущей силы является невозможной.
Для подключения к вращающимся асинхронным машинам и синхронным машинам с возбуждением от постоянных магнитов без датчика скорости вращения и положения существуют разные способы. В асинхронных машинах достаточна идентификация скорости вращения, поскольку фаза не является параметром машины. Для этого можно подавать, например, ток с заданной изменяющейся поисковой частотой. Поиск начинается, как правило, с максимальной частоты и проходит в направлении нуля. Подлежащая идентификации скорость вращения машины лежит в точке максимального напряжения. Кроме того, можно использовать полную модель машины, например, в виде наблюдателей. Они имеют большой диапазон втягивания и начинают колебания на частоте машины, когда они снабжаются реальным машинным напряжением. В синхронных машинах с возбуждением от постоянных магнитов необходимо определять скорость вращения и фазу. Для этого можно измерять, например, электродвижущую силу, которая отражает скорость вращения и фазы ротора. Дополнительно к этому можно применять способ испытательных импульсов, в котором создается последовательность нейтральных зон коммутации и блокировки импульсов, и оцениваются индуцированные импульсные токи.
В качестве альтернативы указанным способам для реактивной синхронной машины возможен также способ, в котором, как и в асинхронной машине применяются наблюдатели, которые имеют большой диапазон втягивания и, начиная с заданного начального значения, принимают правильную фазу и угол.
Для этого в публикации ʺSensorless Control of Reluctance Machines at Arbitrary Operating Conditions Including Standstillʺ, авторы M. Schroedel и др., IEEE Transactions on Power Electronics, Vol. 9, No. 2, 1994, приведено описание способа для определения угла ротора реактивной электрической машины. Для этого можно использовать различные векторы напряжения для определения реактивных сопротивлений по оси d и оси q.
Задачей данного изобретения является создание решения, обеспечивающего возможность надежной работы реактивной электрической машины.
Эта задача решена с помощью способа, управляющего устройства, а также с помощью приводной системы, согласно соответствующим независимым пунктам формулы изобретения. Предпочтительные варианты выполнения данного изобретения являются предметом зависимых пунктов формулы изобретения.
Способ, согласно изобретению, служит для определения частоты ротора и/или угла ротора реактивной электрической машины, при этом реактивная электрическая машина имеет статор со статорной обмоткой и ротор с магнитно анизотропным роторным пакетом. Способ содержит приложение временной последовательности импульсов напряжения к статорной обмотке, определение вызываемой временной ответной последовательности протекающего в статорной обмотке тока, который возникает за счет взаимодействия создаваемой вследствие импульсов напряжения последовательности магнитного потока с магнитно анизотропным роторным пакетом, и определение частоты ротора и/или угла ротора с помощью управляющего устройства на основе определяемой временной ответной последовательности электрического тока. Кроме того, для приложения временной последовательно импульсов напряжения, с помощью вентильного преобразователя частоты выдается с последовательным повторением попеременно значение напряжение неизменной величины и неизменного направления и блокировка импульсов.
Реактивная электрическая машина выполнена, в частности, в виде синхронной реактивной электрической машины без демпферной беличьей клетки. Статор реактивной электрической машины имеет, в частности, трехфазную обмотку. Ротор состоит из магнитно анизотропной конструкции, в частности, ротор может иметь соответствующие блокирующие поток элементы, т.е. заполненные воздухом зоны, которые расположены так, что получается зависимая от направления магнитная проводимость.
В статорную обмотку подается временная последовательность импульсов напряжения. Для этого, например, с помощью преобразователя частоты выдается с последовательным повторением попеременно значение напряжения с низменной величиной и неизменным направлением и блокировка импульсов. Вследствие электрического напряжения образуется изменяющийся во времени магнитный поток. Этот изменяющийся во времени магнитный поток приводит вследствие магнитно анизотропного роторного пакета к зависящей от угла ротора ответной последовательности тока. Она модулирована, в частности, информацией угла положения ротора, соответственно, угла ротора.
В основе этого лежит понимание того, что при имеющейся магнитной анизотропии роторного пакета перемещающийся относительно ротора по круговой траектории пространственный вектор потока обычно приводит к искаженной эллиптической траектории пространственного вектора тока, соответственно, вектора тока. Этот пространственный вектор тока можно определять на основании хода изменения во времени силы электрического тока. Ход изменения во времени силы электрического тока можно измерять, например, с помощью датчика тока. Управляющее устройство может быть, например, предназначено для определения пространственного вектора тока на основе измеренного электрического тока. На основании геометрической формы роторного пакета и/или определяемой силы электрического тока можно определять частоту ротора и/или угол ротора.
Дополнительно к этому частота ротора и/или угол ротора определяется на основе последовательности компонента системы обратной последовательности фаз электрического тока, который представляет часть электрического тока, которая изменяется в зависимости от угла ротора. Кроме того, для определения частоты ротора и/или угла ротора определяется компонент системы прямой последовательности фаз электрического тока, который представляет часть электрического тока, которая не изменяется в зависимости от угла ротора.
Получающееся в координатах ротора эллиптическое прохождение траектории тока получается из наложения компонента системы прямой последовательности фаз и компонента системы обратной последовательности фаз. Компонент тока системы прямой последовательности фаз всегда ориентирован в направлении потока. Компонент тока системы обратной последовательности фаз содержит информацию угла ротора и поэтому обеспечивает возможность определения частоты ротора и/или угла ротора.
При рассматривании с неподвижного ротора и тем самым с точки зрения неподвижно стоящего вектора потока, компонент тока системы прямой последовательности фаз появляется в виде вектора равной величины, соответственно смещения сдвига, в направлении потока. Компонент тока системы обратной последовательности фаз появляется в виде вращающегося вектора и вращается с двойной частотой ротора в направлении вращения движущегося по круговой траектории угла ротора. Наложение обоих компонентов приводит к круговой траектории со смещением сдвига. Смещение сдвига зависит как от параметров двигателя, так и от амплитуды управления, и может быть при известных параметрах двигателя либо вычислено, или при не известных параметрах двигателя измерено. Таким образом, с помощью известного смещения сдвига можно определять из измеренной последовательности тока за вычетом смещения сдвига угол ротора и/или частоту ротора из остающейся последовательности компонента системы обратной последовательности фаз.
В одном варианте выполнения для определения частоты ротора и/или угла ротора определяется фаза и/или частота электрического тока с помощью система фазовой автоподстройки частоты управляющего устройства. Такая система фазовой автоподстройки частоты называется фазовой автоподстройкой частоты (PLL). Высокое качество сигнала на выходе система фазовой автоподстройки частоты обеспечивает возможность непосредственного определения частоты ротора и/или угла ротора с высоким качеством.
В другом варианте выполнения управляющее устройство содержит по меньшей мере один счетчик и/или детектор, в частности, пиковый детектор, с помощью которого определяется количество максимумов определенного электрического тока и/или временной интервал по меньшей мере между двумя соседними максимумами изменения во времени электрического тока. Соответствующий счетчик может также служить для определения времени между переходами через ноль электрического тока. На основании положения во времени максимумов можно определять, например, угол ротора. На основании расстояния по меньшей мере между двумя соседними максимумами можно простым образом определять частоту ротора, соответственно скорость вращения ротора.
В одном варианте выполнения частота ротора и/или угол ротора определяется при остановленном роторе или при вращающемся относительно статора роторе. Способ характеризуется тем, что определение частоты ротора и/или угла ротора можно выполнять как при неподвижном роторе, так и при вращающемся роторе. Таким образом, частоту ротора и/или угол ротора можно определять независимо от фактического рабочего состояния реактивной электрической машины.
В одном варианте выполнения вентильный преобразователь переменного тока подключается к реактивной электрической машине в зависимости от определяемой частоты ротора и/или угла ротора. На основании определяемой частоты ротора и/или определяемого угла ротора можно выполнять подключение вентильного преобразователя переменного тока к вращающейся реактивной электрической машине. Таким образом, можно простым и надежным образом соединять электрически вентильный преобразователь переменного тока правильно по скорости вращения и по фазе с реактивной электрической машиной.
Управляющее устройство, согласно изобретению, для вентильного преобразователя переменного тока реактивной электрической машины предназначено для выполнения способа, согласно изобретению. Такое управляющее устройство может содержать, например, соответствующий процессор обработки сигналов. В управляющем устройстве может выполняться соответствующий код регулирования. Таким образом, простым и экономичным образом обеспечивается управляющее устройство для вентильного преобразователя переменного тока реактивной электрической машины.
Приводная система, согласно изобретению, содержит реактивную электрическую машину, вентильный преобразователь переменного тока, который электрически соединен с реактивной электрической машиной, и управляющее устройство, согласно изобретению, для управления вентильным преобразователем переменного тока. Реактивная электрическая машина выполнена, в частности, в виде синхронной реактивной электрической машины без демпферной беличьей клетки. Вентильный преобразователь переменного тока выполнен, в частности, в виде вентильного преобразователя частоты. Такую приводную систему можно применять, например, для насосов или для вентиляторов.
Указанные относительно способа, согласно изобретению, предпочтительные варианты выполнения и их преимущества справедливы, соответственно, для управляющего устройства, согласно изобретению, а также для приводной системы, согласно изобретению.
Другие признаки изобретения следуют из формулы изобретения, фигур и описания фигур. Все указанные выше в описании признаки и комбинации признаков, а также указываемые ниже в описании фигур и/или показанные лишь на фигурах признаки и комбинации признаков применимы не только в соответствующей указанной комбинации, но также и в других комбинациях или же самостоятельно.
Ниже приводится более подробное пояснение изобретения на основе предпочтительного примера выполнения со ссылками на прилагаемые чертежи, на которых изображено:
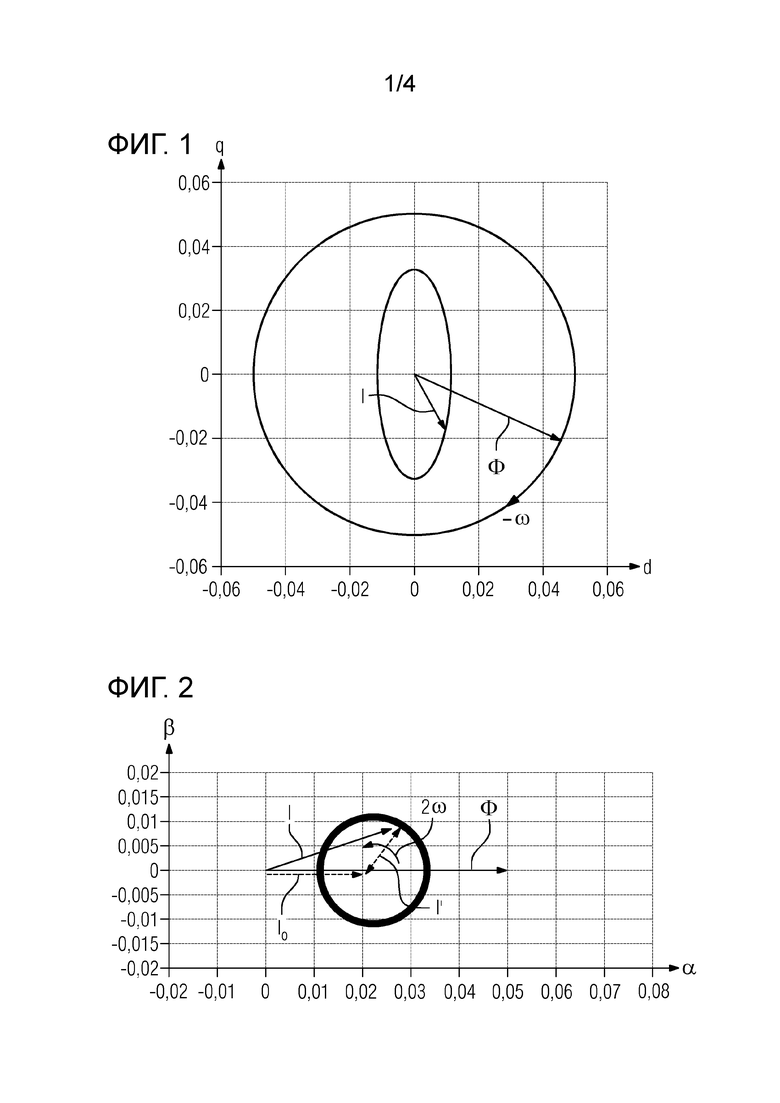
фиг. 1 - координатная система ротора реактивной электрической машины, в которой изображены вектор тока и вектор поля, а также их траектории;
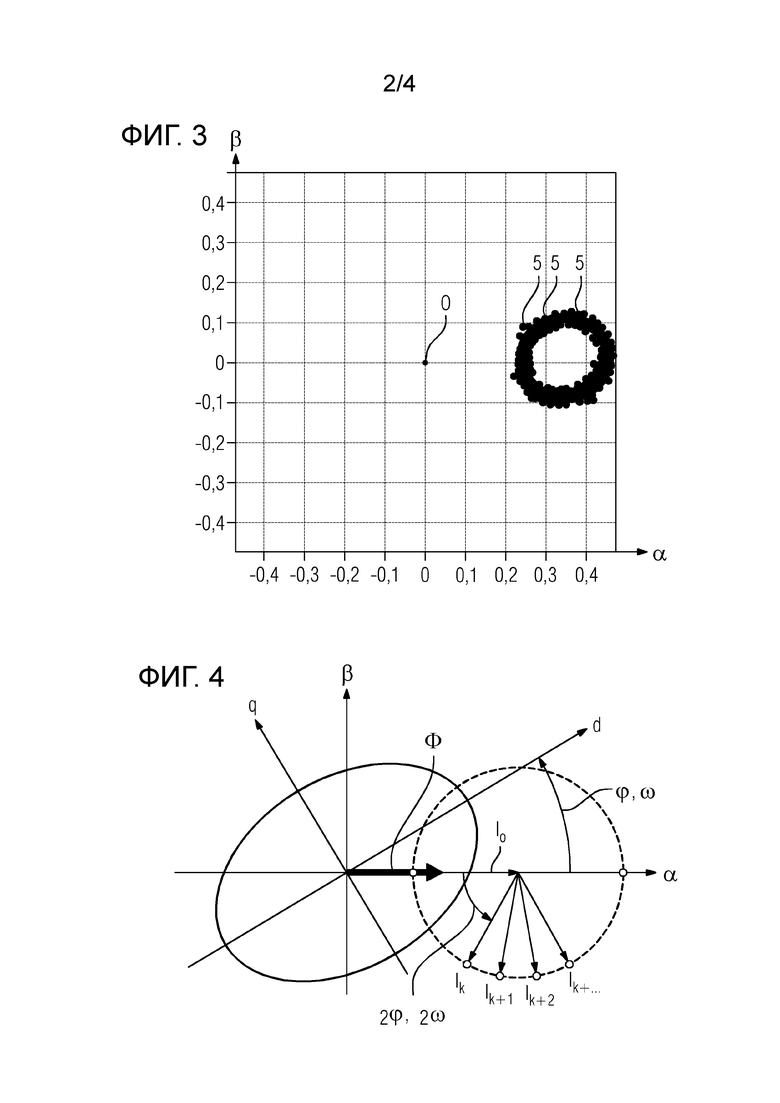
фиг. 2 - координатная система статора реактивной электрической машины, в которой изображены вектор тока и вектор поля, а также их траектории;
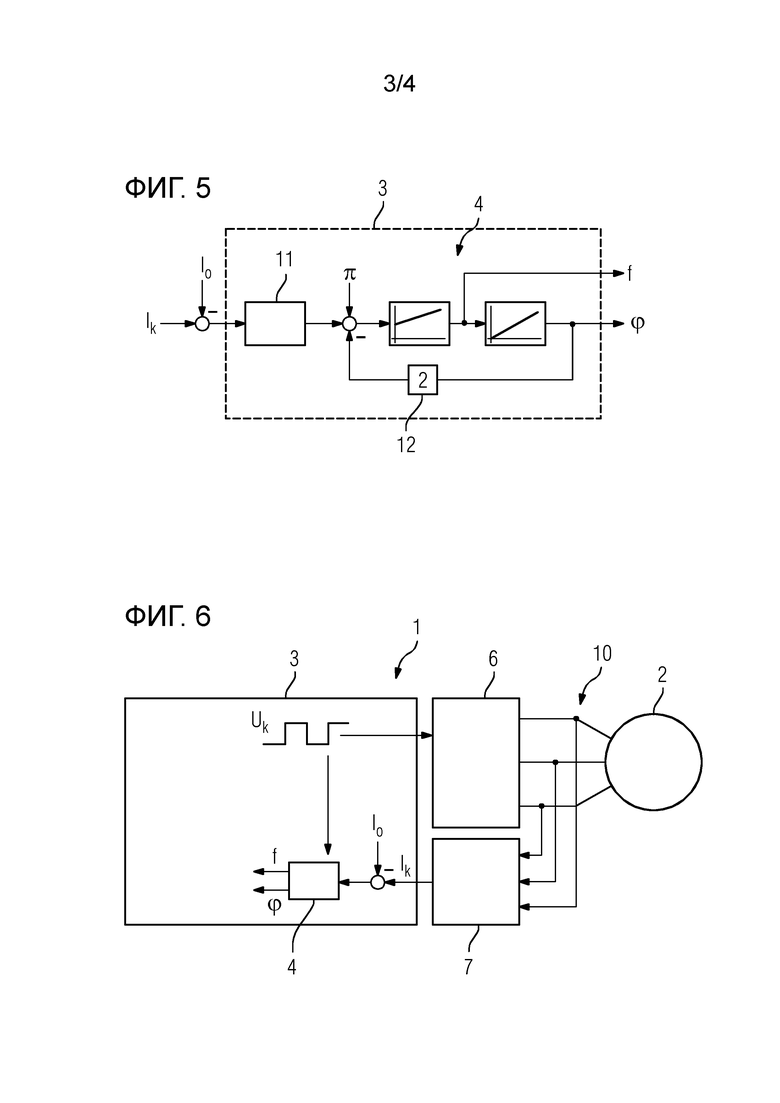
фиг. 3 - координатная система статора, в которой нанесены измерительные значения электрического тока;
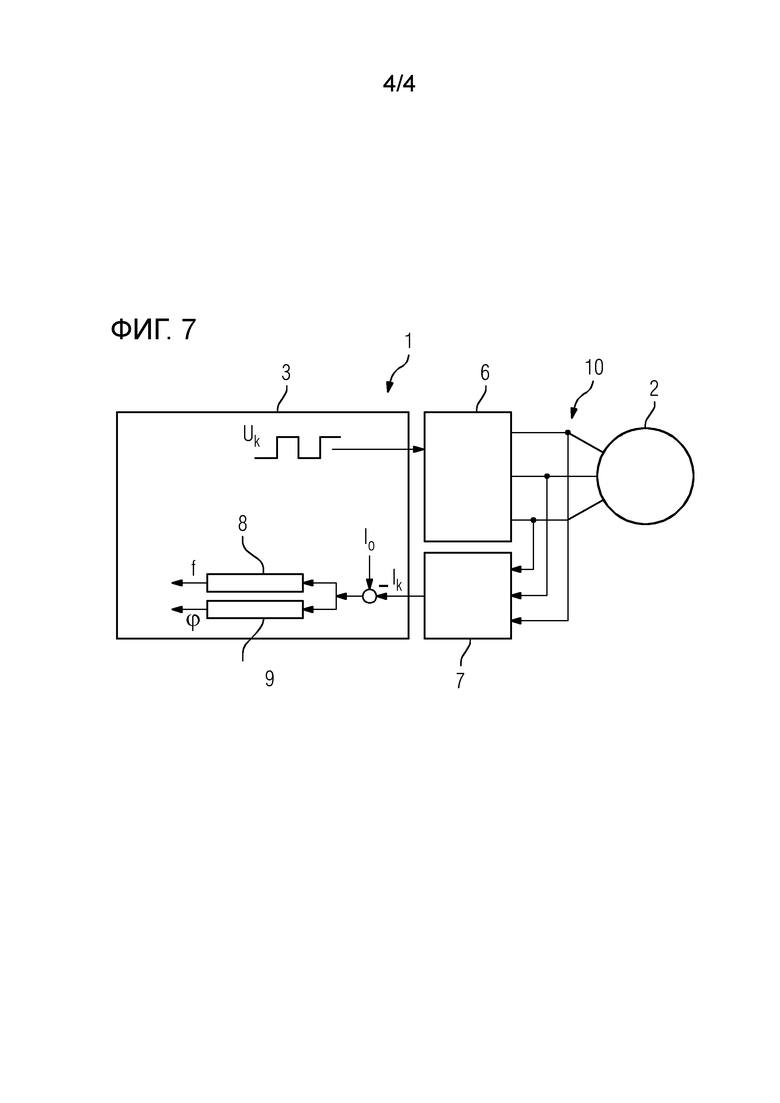
фиг. 4 - координатная система статора и координатная система ротора реактивной электрической машины;
фиг. 5 - блок оценки приводной системы;
фиг. 6 - приводная система с реактивной электрической машиной, вентильным преобразователем переменного тока и управляющим устройством; и
фиг. 7 - приводная система, согласно фиг. 6, в другом варианте выполнения.
В данном случае необходимо определять частоту f ротора и/или угол ϕ ротора реактивной электрической машины 2. Реактивная электрическая машина 2 выполнена, в частности, в виде синхронной реактивной электрической машины без демпферной беличьей клетки. Реактивная электрическая машина 2 имеет не изображенный здесь статор с соответствующими статорными обмотками 10. Дополнительно к этому, реактивная электрическая машина 2 имеет не изображенный здесь ротор, который имеет пакет ротора, который выполнен магнитно анизотропным. Роторный пакет может быть образован из листового пакета и иметь соответствующие блокирующие поток элементы, т.е. заполненные воздухом зоны, соответственно выемки, за счет чего достигается магнитно анизотропное выполнение. На основе определяемой частоты f ротора и/или на основании определяемого угла ϕ ротора можно соединять, в частности, вентильный преобразователь 6 переменного тока с вращающейся реактивной электрической машиной 2 правильно по скорости вращения и по фазе.
На фиг. 1 показана координатная система ротора, которая имеет ось d и ось q. В координатной системе ротора изображаются физические величины реактивной электрической машины 2 в виде векторов в комплексной плоскости. Ось d показывает реальную часть координатной системы ротора в направлении большей магнитной проводимости. Ось q показывает мнимую часть координатной системы ротора в направлении меньшей магнитной проводимости. В данном примере выполнения ротор вращается с частотой ω. В координатной системе ротора магнитный поток Φ изображен в виде вектора потока. Вектор потока принимается неподвижно стоящим относительно статора. В координатной системе ротора поток Φ, соответственно вектор потока, кажется, при идеальном линейном рассматривании, вращающимся с частотой -ω по круговой траектории.
За счет потока Φ в статорной обмотке 10 вызывается электрический ток I. Ротор реактивной электрической машины 2, соответственно ее роторный пакет, имеет магнитную анизотропию, т.е. ротор имеет зависимую от направления магнитную проводимость. На основании этого движущийся относительно ротора по круговой траектории наведенный поток Φ приводит к соответствующей траектории вектора тока, который представляет электрический ток I. Траектория тока I, соответственно вектора тока, обуславливается геометрической формой, соответственно, магнитной анизотропией роторного пакета. В данном примере выполнения получается, при рассматривании в системе ротора, эллиптическая траектория вектора тока.
На фиг. 2 показаны прохождения, согласно фиг. 1, из перспективы вектора тока, т.е. в координатной системе статора. Координатная система статора имеет ось α и ось β. Ось α показывает реальную часть, и ось β показывает мнимую часть координатной системы статора. Вектор потока, соответственно поток Φ, кажется в данном случае неподвижным. Вектор тока, который представляет электрический ток I, может быть разложен на компонент I0 системы прямой последовательности фаз и компонент Iʹ системы обратной последовательности фаз. Компонент I0 системы прямой последовательности фаз находится в фазе с потоком Φ. Компонент Iʹ системы обратной последовательности фаз вращается в направлении вращающегося ротора с двойной частотой 2ω. Изменение во времени электрического тока I получается из изменения во времени компонента Iʹ системы обратной последовательности фаз.
На фиг. 3 показана последовательность измерительных значений 5 для электрического тока I в координатной системе статора. В реактивной электрической машине 2 поле Φ создается, например, в виде высокочастотной последовательной цепочки импульсов {Φk} с постоянным направлением. В данном случае используется запись с фигурными скобками для описания последовательности. Для этого с помощью частотного преобразователя с последовательным повторением попеременно выдается значение напряжения с неизменной величиной и неизменным направлением и блокировка импульсов {Uk, Zk}. При приложенном напряжении Uk создается вектор поля, в следующем такте при прилагаемой блокировке Zk импульсов вектор потока снова исчезает. Таким образом, с последовательным повторением требуемая цепочка импульсов для потока {Φk} квази замыкается в машине. Изображение получающейся из этого цепочки импульсов статорного тока {Ik} показано на основе измерительных значений 5. Измерительные значения 5 образуют в координатной системе статора круговую траекторию со смещением сдвига I0 относительно начала координат 0. Смещение сдвига получается из компонента I0 системы прямой последовательности фаз электрического тока Ik. Полученная траектория является результатом компонента Iʹ системы обратной последовательности фаз и содержит информацию об угле ϕ ротора. Таким образом, при известном компоненте I0 системы прямой последовательности фаз, соответственно смещении сдвига, можно определять из измерительных значений 5 тока {Ik}, после вычитания из I0, угол ϕ ротора и/или частоту f ротора.
Смещение сдвига можно при известных параметрах машины либо вычислять заранее, либо, при неизвестных параметрах машины, определять заранее посредством арифметического усреднения измерительных значений 5. В качестве альтернативного решения, можно выполнять определение заранее посредством образования среднего значения из минимальной величины и максимальной величины измерительных значений 5.
На фиг. 4 показана пространственная векторная диаграмма реактивной электрической машины 2. Пространственная векторная диаграмма содержит координатную систему статора и вращающуюся относительно координатной системы статора координатную систему ротора. В данном случае можно видеть, что за счет последовательности импульсов напряжения {Uk, Zk} создается поток Φ, соответственно вектор потока, который неподвижен относительно статора и имеет относительно оси α неизменное направление. За счет импульсов напряжения {Uk, Zk} получается последовательность векторов тока {Ik}, значения которых Ik, Ik+1, Ik+2 лежат на окружности со смещением сдвига. Последовательность компонента {Iʹk}={Ik}-I0 системы обратной последовательности фаз, которая возникает после вычитания смещения I0 из {Ik} и изображена в виде соединительного вектора от I0 к значениям Ik, содержит, как показано, информацию о двойном угле ϕ ротора, соответственно, информацию о двойной частоте f ротора.
На фиг. 5 показана блок-схема оценочного блока 3 для определения частоты f ротора и/или угла ϕ ротора. В оценочный блок 3 подается временная ответная последовательность электрического тока {Ik}, которая измеряется, например, с помощью датчика 7 тока. Дополнительно к этому, из электрического тока {Ik} вычитается смещение сдвига I0. Таким образом, последовательность компонента {Iʹk} системы обратной последовательности фаз электрического тока {Ik} подается в систему 4 фазовой автоподстройки частоты. Система 4 фазовой автоподстройки частоты синхронизируется частотой сигнала напряжения {Uk}. С помощью блока 11 можно определять угловой аргумент изменения во времени компонента {Iʹk} системы обратной последовательности фаз. Кроме того, с угловым аргументом суммируется угол Π смещения. Дополнительно к этому, с помощью блока 12 выполняется уменьшение угла тока и частоты тока на фактор 2. С помощью системы 4 фазовой автоподстройки частоты можно определять частоту f ротора и угол ϕ ротора.
На фиг. 6 показана приводная система 1, согласно первому варианту выполнения. Приводная система 1 содержит реактивную электрическую машину 2. Кроме того, приводная система 1 содержит вентильный преобразователь 6 переменного тока, который выполнен, в частности, в виде частотного преобразователя. Вентильный преобразователь 6 переменного тока электрически соединен со статорной обмоткой 10. В данном примере выполнения статорная обмотка 10 имеет три фазы. На статорную обмотку 10 подаются импульсы напряжения Uk. Они вызывают электрический ток I в статорной обмотке 10, который измеряется с помощью датчика 7 тока.
На фиг. 7 показана приводная система 1 в другом варианте выполнения. Вместо системы 4 фазовой автоподстройки частоты предусмотрен соответствующий счетчик 8, который может определять время между переходами через ноль хода изменения во времени электрического тока I и тем самым может определять частоту f ротора. Кроме того, предусмотрен детектор 9, в частности, пиковый детектор, который на основании максимальных значений электрического тока I может определять угол ϕ ротора, соответственно, фазу.
С помощью приводных систем 1, согласно фиг. 6 и 7, можно надежно определять частоту f ротора и угол ϕ ротора. Например, можно с помощью частоты напряжения Uk, которая составляет 1 кГц, при длительности идентификации 50 мс определять частоту f ротора от 0 Гц до примерно ±100 Гц. При более высокой частоте может быть увеличена производительность.
На основании небольшой энергии сигналов, способ определения частоты f ротора и/или угла ϕ ротора является квази бесшумным и без крутящих моментов. Кроме того, вентильный преобразователь 6 переменного тока можно подключать к вращающейся реактивной электрической машине 2 правильно по скорости вращения и по фазе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2522675C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1977 |
|
SU1100703A1 |
| Датчик положения ротора электрической машины | 1986 |
|
SU1458946A1 |
| Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором (его варианты) | 1980 |
|
SU1100699A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Аксиальный преобразователь частоты | 2022 |
|
RU2781082C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
Изобретение относится к области электротехники и может быть использовано для управления реактивной электрической машиной без демпферной клетки. Способ определения частоты (f) ротора и/или угла (ϕ) ротора реактивной электрической машины (2), которая имеет статор со статорной обмоткой (10) и ротор с магнитно анизотропным роторным пакетом, осуществляют посредством приложения временной последовательности импульсов напряжения (Uk) к статорной обмотке (10), определения ответной последовательности импульсов протекающего в статорной обмотке (10) электрического тока (Ik), который возникает вследствие импульсов напряжения (Uk) и последовательно наводимого потока (Φk) вследствие магнитно анизотропного роторного пакета, при этом определение частоты (f) ротора и/или угла (ϕ) ротора осуществляют на основе измеряемой ответной последовательности импульсов электрического тока (Ik) с помощью оценочного блока (3). 3 н. и 3 з.п. ф-лы,7 ил.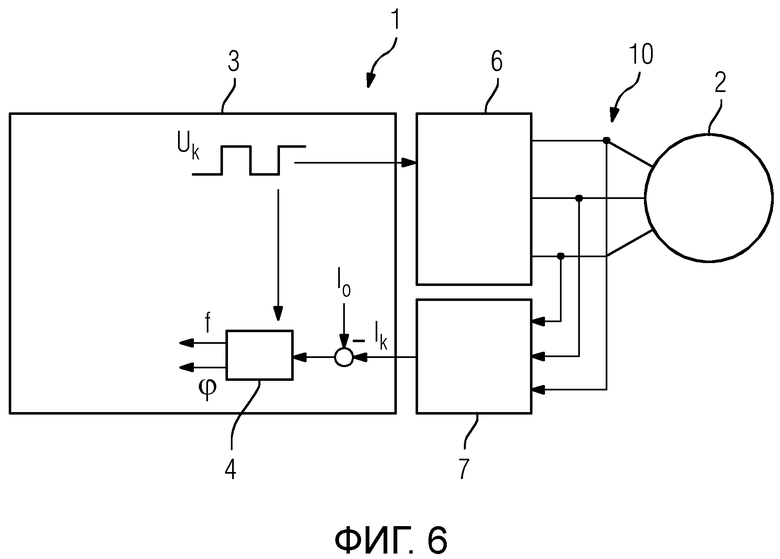
1. Способ определения частоты (f) ротора и/или угла (ϕ) ротора реактивной электрической машины (2), при этом реактивная электрическая машина (2) имеет статор со статорной обмоткой (10) и ротор с магнитно анизотропным роторным пакетом, посредством
- приложения временной последовательности импульсов напряжения (Uk) к статорной обмотке (10),
- определения ответной последовательности импульсов протекающего в статорной обмотке (10) электрического тока (Ik), который возникает вследствие импульсов напряжения (Uk) и последовательно наводимого потока (Φk) вследствие магнитно анизотропного роторного пакета, и
- определения частоты (f) ротора и/или угла (ϕ) ротора на основе измеряемой ответной последовательности импульсов электрического тока (Ik) с помощью оценочного блока (3),
отличающийся тем, что
- для приложения временной последовательности импульсов напряжения (Uk), с помощью вентильного преобразователя частоты выдают с последовательным повторением попеременно значение напряжения неизменной величины и неизменного направления и блокировки импульсов,
- для определения частоты (f) ротора и/или угла (ϕ) ротора определяют компонент тока (I0) системы прямой последовательности фаз электрического тока (Ik), который представляет часть электрического тока (Ik), которая не изменяется в зависимости от угла (ϕ) ротора, и
- частоту (f) ротора и/или угол (ϕ) ротора определяют на основе последовательности компонента тока (I'k) системы обратной последовательности фаз электрического тока (Ik), который представляет часть электрического тока (Ik), которая изменяется в зависимости от угла (ϕ) ротора и получается посредством вычитания компонента тока (I0) системы прямой последовательности фаз из измеренных значений электрического тока (Ik).
2. Способ по п. 1, отличающийся тем, что оценочный блок (3) снабжен по меньшей мере одним счетчиком (8) и/или детектором (9), с помощью которого определяют количество максимумов определяемого электрического тока (Ik) и/или временного интервала по меньшей мере между двумя соседними максимумами изменения во времени электрического тока (Ik).
3. Способ по п. 1 или 2, отличающийся тем, что частоту (f) ротора и/или угол (ϕ) ротора определяют при остановленном роторе или при вращающемся относительно статора роторе.
4. Способ по любому из пп. 1-3, отличающийся тем, что вентильный преобразователь (6) переменного тока подключают к реактивной электрической машине (2) в зависимости от определяемой частоты (f) ротора и/или угла (ϕ) ротора.
5. Управляющее устройство для вентильного преобразователя (6) переменного тока реактивной электрической машины (2), содержащее процессор обработки сигналов и оценочный блок (3), причем управляющее устройство выполняет код регулирования для выполнения способа по любому из пп. 1-4.
6. Приводная система (1), содержащая реактивную электрическую машину (2), вентильный преобразователь (6) переменного тока, который электрически соединен с реактивной электрической машиной (2), и управляющее устройство по п. 5 для управления вентильным преобразователем (6) переменного тока.
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| RU 24811694 С1, 10.05.2013 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| DE 102010030876 A1, 03.02.2011 | |||
| US 8253360 B2, 28.08.2012 | |||
| US 8829827 B2, 09.09.2014 | |||
| WO 2014155158 A1, 02.10.2014 | |||
| CN 101958686 B, 01.05.2013. | |||

