Изобретение относится к промышленным и сельскохозяйственным тракторам, бульдозерам, погрузчикам, автогрейдерам и другим гусеничным и колесным самоходным машинам с электромеханической трансмиссией, предназначенным для выполнения землеройных, строительных, дорожных, сельскохозяйственных и других работ.
Известна электромеханическая трансмиссия гусеничного трактора, содержащая тепловой двигатель, связанный с тяговым генератором, два тяговых электродвигателя, кинематически связанных с гусеницами противоположных бортов, и систему управления электрооборудованием. Тяговый генератор и тяговые электродвигатели выполнены синхронными, переменного тока. В состав системы управления электрооборудованием входят преобразователь и микропроцессорный контроллер верхнего уровня, а тяговые электродвигатели размещены параллельно в одном корпусе [1].
Недостатком этой трансмиссии является ее пониженная надежность. Это обусловлено наличием обмоток или постоянных магнитов на роторах синхронного генератора и синхронных тяговых электродвигателей, на которые действуют большие центробежные силы, невозможностью работы при выходе из строя одной из фазных обмоток синхронного электродвигателя или тягового синхронного генератора, а также повышенной сложностью конструкции статорных фазных обмоток синхронного электродвигателя и синхронного генератора.
Известна также электромеханическая трансмиссия, содержащая двигатель внутреннего сгорания (ДВС), электрические машины, электронные коммутаторы (инверторы), силовые электрические шины, накопитель электрической энергии и блок управления. Одна электрическая машина кинематически соединена с ДВС, а прочие электрические машины кинематически соединены с тяговыми устройствами. Блок управления подключен к электронным коммутаторам (инверторам), а накопитель электрической энергии - к силовым шинам. В качестве электрических машин применены реактивные индукторные машины с самовозбуждением и с зубчатыми пассивными ферромагнитными роторами. Во время работы электрических машин электронные коммутаторы подключают к силовым шинам их фазные обмотки (обмотки якоря), выполненные в виде сосредоточенных катушек и размещенные на полюсах статора [2].
К недостатками известной трансмиссии относятся ее пониженная надежность, обусловленная необходимостью применения сложных по конструкции электронных контроллеров (коммутаторов) реактивных индукторных машин с самовозбуждением. Обусловлено это тем, что токи в коммутируемых фазах протекают только в одном направлении, что вызывает необходимость применения несимметричных полумостовых коммутаторов. Кроме того, для реактивных индукторных машин с самовозбуждением характерен ограниченный диапазон регулирования, вызванный отсутствием возможности изменения скорости путем изменения тока возбуждения.
Наиболее близкой к предложенной является электромеханическая трансмиссия самоходной машины, содержащая тяговый генератор, соединенный с ДВС и выполненный с возможностью преобразования механической энергии ДВС в электрическую энергию, тяговые вентильно-индукторные электродвигатели с независимым возбуждением, приспособленные для преобразования электрической энергии в механическую, а также бортовые редукторы, связанные с тяговыми вентильно-индукторными электродвигателями и приспособленные для привода ведущих колес самоходной машины [3].
Применение в трансмиссии вентильно-индукторных электродвигателей с независимым возбуждением, известных также как одноименно-полюсные индукторные электродвигатели с аксиальным возбуждением, позволяет обеспечить регулирование тягового усилия в широком диапазоне скоростей движения самоходной машины путем изменения как фазных напряжений, так и тока возбуждения. В этом случае реализуется возможность двухзонного регулирования скорости по аналогии с обычными приводами постоянного тока.
Однако расширение зоны регулирования скорости при этом достигается за счет усложнения конструкции и снижения надежности трансмиссии.
В вентильно-индукторном электродвигателе с независимым возбуждением, несмотря на явнополюсный ротор, реактивный момент (момент при отсутствии возбуждения) практически отсутствует (величины индуктивностей обмоток отдельных фаз слабо зависят от угла поворота ротора). Это затрудняет реализацию бездатчикового инвертора тягового электродвигателя, особенно при его работе при неподвижном роторе и на низких частотах вращения, что приводит к соответствующему усложнению конструкции инвертора и снижению надежности трансмиссии в целом.
Кроме того, в одноименно-полюсных индукторных электродвигателях с аксиальным возбуждением необходимо применять специальные меры для предотвращения замыкания магнитного потока возбуждения по подшипниковым щитам в обход магнитопровода-статора. Наличие такого паразитного пути замыкания потока возбуждения приводит к преждевременному выходу из строя подшипников качения. Чтобы освободить подшипники от магнитного потока в конструкции электродвигателя применяют немагнитные материалы, в частности используют немагнитный вал ротора и немагнитные подшипниковые щиты. Однако при применении электродвигателя на самоходной машине его крепление к бортовому редуктору обычно осуществляется через подшипниковый щит (мотор-редуктор, мотор-колесо). Вследствие этого применение немагнитного материала, имеющего, как правило, меньшую механическую прочность, приводит к снижению надежности работы трансмиссии.
Существует также проблема обеспечения надежности, связанная с размещением обмотки возбуждения. Как известно, у электродвигателей этого типа существуют два различных способа ее размещения - «поднятая» и «опущенная» обмотки возбуждения. В конструкции с «поднятой» обмоткой возбуждения эта обмотка находится вплотную к железу спинки статора над фазными обмотками. В конструкции с «опущенной» обмоткой - вблизи магнитопровода ротора между его пакетами.
Для тягового электропривода, в целях уменьшения габаритных размеров, как правило, используется «опущенная» обмотка возбуждения, что вызывает необходимость усложнения конструкции ротора. Он должен быть разборным, поскольку обмотка возбуждения располагается между пакетами ротора. Кроме того, «опущенная» обмотка возбуждения имеет плохую теплоотдачу ввиду малой площади ее контакта со статором (как правило, контакт осуществляется через несколько крепежных болтов). Поэтому в режиме максимальной передаваемой мощности трансмиссии существует опасность перегрева обмоток возбуждения тяговых электродвигателей, что приводит к снижению надежности трансмиссии.
Задачей, решаемой изобретением, является создание электромеханической трансмиссии, имеющей более высокую надежность ее работы при сохранении возможности регулирования тягового усилия в широком диапазоне скоростей движения самоходной машины.
Этот технический результат достигается за счет того, что в электромеханической трансмиссии самоходной машины, содержащей по меньшей мере один тяговый генератор, соединенный с ДВС и преобразующий механическую энергию ДВС в электрическую энергию, по меньшей мере один тяговый электродвигатель, преобразующий электрическую энергию в механическую, бортовые редукторы, приспособленные для привода ведущих колес или гусениц самоходной машины и связанные по меньшей мере с одним тяговым электродвигателем непосредственно или по меньшей мере через одно передаточное устройство, причем по меньшей мере один тяговый генератор и/или тяговый электродвигатель выполнен реактивным индукторным и содержит ротор, на валу которого закреплен зубчатый магнитопровод, и статор с полюсами и обмотками якоря, выполненными в виде сосредоточенных катушек, а также выполнен с совмещенными обмотками возбуждения и якоря, или с магнитоэлектрическим возбуждением (с возбуждением от постоянных магнитов, расположенных на статоре), или с комбинированным возбуждением с использованием магнитоэлектрического возбуждения и совмещенных обмоток возбуждения и якоря, или обмоток, каждая из которых поочередно используется в качестве обмотки возбуждения или якоря в зависимости от положения ротора.
Благодаря указанным отличительным признакам в предложенных вариантах трансмиссии с электрическими машинами, имеющими совмещенные обмотки возбуждения и якоря, обеспечивается возможность управления трансмиссией путем независимого изменения как напряжения на обмотках якоря, так и тока возбуждения. В сочетании с более простой конструкции электрических машин это обеспечивает повышение надежности работы трансмиссии при сохранении возможности регулирования тягового усилия в широком диапазоне скоростей движения самоходной машины.
Реализация указанных отличительных признаков обеспечивает также возможность применения двухполярного управления тяговыми электродвигателями, а именно - использовать серийные высокоинтегрированные электронные инверторы, выполненные по стандартным схемам трехфазных мостов, что также обеспечивает повышение надежности трансмиссии.
Применение комбинированного возбуждения с использованием магнитоэлектрического возбуждения и совмещенных обмоток возбуждения и якоря обеспечивает достижение этого же технического результата с одновременным снижением мощности источника тока возбуждения и повышением КПД электрической машины.
Указанные отличительные признаки обеспечивают также возможность соединения фазных обмоток якоря тягового генератора и тягового электродвигателя по схеме треугольника (или многоугольника) с включением диодов последовательно в каждую из фаз. Это обеспечивает повышение надежности за счет сокращения количества проводов, необходимых для соединения выпрямителя и инвертора соответственно с тяговым генератором и тяговым электродвигателем, до трех. При этом наличие диодов позволяет использовать соединение обмоток по схеме треугольника без ухудшения параметров тягового генератора и тягового электродвигателя.
Для управления трансмиссией с предложенными тяговыми электродвигателями могут быть применены трехфазные мостовые инверторы со стандартной силовой базой и классической структурой векторного управления, дополненной алгоритмом ослабления поля. Это увеличивает диапазон скоростей при работе с постоянной мощностью и, соответственно, обеспечивает достижение необходимого технического результата.
При этом тяговый генератор и тяговые электродвигатели не содержат «опущенных» или «поднятых» обмоток возбуждения, технологичны в изготовлении, допускают большой перегрев, отличаются простотой отвода тепла от обмоток, что также обеспечивает достижение указанного технического результата - повышение надежности трансмиссии при сохранении широкого диапазона регулирования скорости в режиме постоянной мощности.
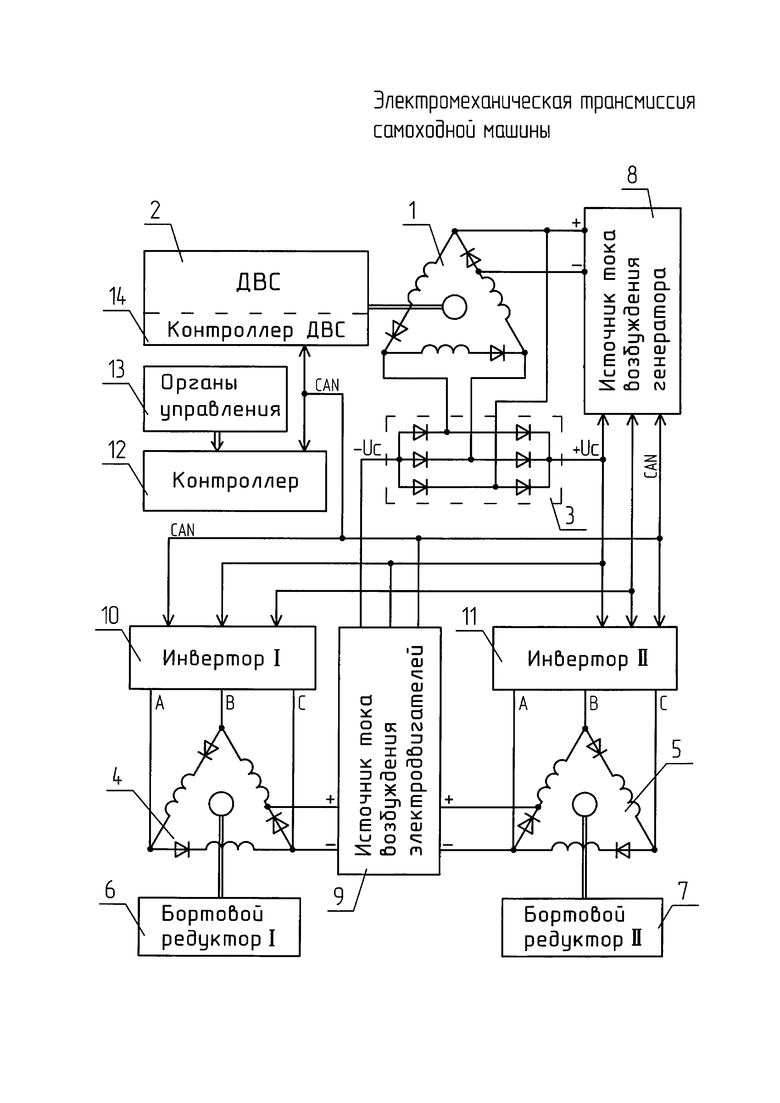
На чертеже в качестве одного из возможных вариантов реализации предложенного устройства показана упрощенная схема электромеханической трансмиссии самоходной машины.
Она содержит тяговый генератор 1, функционально соединенный с ДВС 2 и обеспечивающий преобразование механической энергии ДВС в электрическую энергию, силовой выпрямитель 3 тягового генератора 1, два тяговых электродвигателя 4, 5, приспособленные для преобразования электрической энергии в механическую энергию и соединенные с бортовыми редукторами 6, 7.
На машине может быть установлен один тяговый генератор 1 и один силовой выпрямитель 3 (предпочтительный вариант) или несколько тяговых генераторов со своими силовыми выпрямителями, которые либо соединены параллельно, либо предназначены для обеспечения электрической энергии отдельных тяговых электродвигателей.
Бортовые редукторы 6, 7 соединены с ведущими колесами или с ведущими звездочками колесной или гусеничной самоходной машины.
Тяговый генератор 1 и/или тяговые электродвигатели 4, 5 выполнены реактивными индукторными. Каждый из них содержит пассивный ротор с валом, на котором закреплен зубчатый магнитопровод, и статор с полюсами и обмотками якоря, выполненными в виде сосредоточенных катушек. Тяговый генератор 1 и/или тяговые электродвигатели 4, 5 выполнены с совмещенными обмотками возбуждения и якоря, или с магнитоэлектрическим возбуждением, или с комбинированным возбуждением с использованием магнитоэлектрического возбуждения и совмещенных обмоток возбуждения и якоря.
Возможными вариантами тягового генератора являются генератор с магнитоэлектрическим возбуждением, а также генератор с одновременным (комбинированным) использованием магнитоэлектрического и электромагнитного возбуждения. Наличие постоянных магнитов обеспечивает в таком генераторе режим самовозбуждения, а ток нагрузки создает дополнительный магнитный поток, существенно увеличивающий мощность генератора.
Возможна также реализация тягового генератора 1 и/или тяговых электродвигателей 4, 5 с обмотками, каждая из которых поочередно используется в качестве обмотки возбуждения или якоря в зависимости от положения ротора. Для реализации такой возможности обмотка имеет полный шаг, а витки этой обмотки, размещенной на статоре, располагаются в межполюсном промежутке. Такой электродвигатель работает как обращенная машина постоянного тока. Ее фазные обмотки статора могут питаться как от независимых индивидуальных источников, так и от традиционных многофазных управляемых преобразователей, выполненных, например, по мостовой схеме. При этом одна и та же обмотка в нужный момент времени выполняет либо функцию возбуждения, либо функцию создания момента. В итоге реализуется синхронный реактивный электродвигатель с независимым управлением по каналу возбуждения, именуемый в зарубежной литературе - FRRM (Field Regulated Reluctance Machine).
На чертеже показан пример реализации тягового генератора 1 и тяговых электродвигателей 4, 5, у которых фазные обмотки якоря соединены по схеме треугольника (частный случай многоугольника), а в каждую из фаз последовательно и согласованно включены диоды.
Магнитопроводы тягового генератора 1 и тяговых электродвигателей 4, 5 выполнены, в частности, таким образом, что каждая пара зубцов статора является отдельной фазой и при этом образует магнитный поток возбуждения. В этом случае число зубцов ротора выбрано четным, во-первых, для того, чтобы исключить силы одностороннего магнитного протяжения и, соответственно, механические вибрации ротора и статора, и, во-вторых, для увеличения величины пульсаций магнитного потока в фазах - в определенные моменты времени под парой зубцов статора, образующих фазу, должны размещаться зубцы ротора, а в следующий момент времени, через полпериода - пазы ротора. Это условие можно выполнить, если число зубцов ротора является четным.
При такой схеме тягового генератора и тяговых электродвигателей в якорной обмотке протекает выпрямленный однополупериодный ток нагрузки тягового генератора и рабочий ток тягового электродвигателя. Его МДС направлена согласованно с МДС тока возбуждения. В отдельных случаях, с целью расширения диапазона регулирования в сторону более высоких скоростей вращения ротора, МДС могут быть направлены встречно.
Для возбуждения тягового генератора 1 и тяговых электродвигателей 4, 5 могут использоваться источники тока возбуждения 8, 9.
Магнитопроводы по меньшей мере одного тягового генератора и тягового электродвигателя выполнены с возможностью размещения отдельных обмоток возбуждения и обмоток якоря на одних и тех же зубцах статора. В этом случае источники тока возбуждения генератора и электродвигателей 8, 9 подключены к этим обмоткам.
Возможно также совмещение обмоток возбуждения и обмоток якоря не только в части их размещения на одних и тех же зубцах статора, но и их в физическое совмещение - выполнение в виде одной обмотки, как это показано на чертеже.
В последнем случае источники тока возбуждения генератора и электродвигателей 8, 9 могут быть подключены, в частности, к диодам, включенным последовательно в одну из фаз тягового генератора 1 и тяговых электродвигателей 4, 5.
Для расширения диапазона регулирования у источника тока возбуждения электродвигателей может быть предусмотрено изменение полярности выходного тока. Соответственно, магнитодвижущая сила тока нагрузки и тока возбуждения в обмотке могут быть направлены согласованно или встречно в зависимости от режима работы электромеханической трансмиссии.
С целью обеспечения высокой надежности трансмиссии роторы тягового генератора и тяговых электродвигателей не содержат обмоток и постоянных магнитов.
Тяговый генератор и тяговые электродвигатели имеют, преимущественно, жидкостное охлаждение, которое выполнено автономным или объединено с системой охлаждения ДВС.
Многофазный силовой выпрямитель 3 может быть встроен в тяговый генератор 1 или подключен к нему. Выходное высоковольтное напряжение силовой цепи трансмиссии +Uc, -Uc от силового выпрямителя 3 поступает на инверторы I, II 10, 11, которые преобразуют постоянное напряжение силовой цепи в переменное и передают его на тяговые электродвигатели 4, 5. Эти электродвигатели могут иметь датчики положения их роторов, соединенные с инверторами 10, 11 (на чертеже условно не показаны).
Инверторы 10, 11 выполнены, как правило, в виде мостовых инверторов с числом фаз не менее трех. Их силовая часть типовая и состоит, например, из трех «стоек» силовых ключей на IGBT-транзисторах с обратными диодами, собранными в «интеллектуальный» модуль или несколько модулей (Intelligent Power Module - IPM).
Инверторы могут быть встроены в тяговые электродвигатели 4, 5, а электродвигатели, в свою очередь, могут быть встроены в бортовые редукторы 6, 7 вместе с инверторами или без них. В этих случаях реализуются мехатронные тяговые модули.
Источники тока возбуждения тягового генератора 8 и тяговых электродвигателей 9 в общем случае являются регулируемыми. Каждый из них может быть выполнен в виде дополнительного генератора, соединенного с ДВС 2, в виде дополнительных обмоток тягового генератора 1, соединенных с дополнительным выпрямителем, в виде преобразователя напряжения силовой цепи генератора +Uc, -Uc, или в виде преобразователя напряжения низковольтного электрооборудования машины.
Причем возможна реализация как отдельных источников тока возбуждения, так и многоканального источника с гальванически развязанными выходными каналами. Предпочтительный способ регулирования величины тока возбуждения - широтно-импульсная модуляция с помощью силовых электронных ключей.
Общее управление трансмиссией, когда оно необходимо, осуществляется от контроллера 12, который может именоваться также системным контроллером, блоком управления и т.п. К этому контроллеру в общем случае подключены органы управления трансмиссией (джойстики, рычаги, переключатели т.п.) 13 и панель оператора с элементами индикации (на чертеже условно не показана).
ДВС 2 может иметь отдельный контроллер ДВС 14.
Трансмиссия может также содержать различные дополнительные устройства, условно не показанные на чертеже, - накопитель энергии и тормозной резистор, оснащенные соответствующими схемами управления и подключенные к силовой цепи, рабочие и стояночные тормоза машины, устройства охлаждения отдельных компонентов трансмиссии и т.д., а также различные датчики - датчики угловых скоростей бортовых редукторов 6, 7, датчики температуры, датчики наличия масла в бортовых редукторах и т.д.
Отдельные устройства трансмиссии могут быть электрически соединены как между собой, так и с контроллером 12. В последнем случае для соединений целесообразно использовать стандарт промышленной сети CAN (Controller Area Network - сеть контроллеров) и/или LIN (Local Interconnect Network - локальная сеть).
Предложенная электромеханическая трансмиссия самоходной машины работает следующим образом.
Оператор при помощи органов управления 13 задает рабочую скорость и направление движения машины. ДВС 2 непосредственно или через согласующий редуктор/мультипликатор приводит во вращение ротор тягового генератора 1. Его выходное напряжение переменного тока с помощью силового выпрямителя 3 преобразуется в напряжение постоянного тока +Uc, -Uc, которое поступает на инверторы 10, 11 тяговых электродвигателей 4, 5.
Для самоходной машины предпочтительно иметь один силовой выпрямитель 3 на все тяговые электродвигатели 4, 5, что позволяет обеспечить прямой обмен энергией между левым и правым бортом машины при ее маневрировании при соответствующем уменьшении поглощения энергии тормозным резистором и увеличении КПД трансмиссии в целом.
Для каждого тягового электродвигателя устанавливается отдельный модуль инвертора 10, 11, предпочтительно трехфазного. Возможна также установка нескольких модулей инверторов на один тяговый электродвигатель при дроблении мощности по секциям статора электродвигателя.
Инверторы преобразуют напряжение постоянного тока +Uc, -Uc в переменное напряжение регулируемой частоты, которое поступает на якорные обмотки (фазы) тяговых электродвигателей 4, 5. Крутящий момент, создаваемый тяговыми электродвигателями 4, 5, передается на бортовые редукторы 6, 7, в результате чего осуществляется движение самоходной машины в соответствии с направлением и скоростью, выбранными оператором.
Каждый инвертор имеет высокопроизводительный встроенный микроконтроллер (цифровой сигнальный процессор), обеспечивающий прием сигналов управления и прямое цифровое управление электронными силовыми ключами.
Инверторы (их микроконтроллеры) объединены локальной сетью CAN, LIN и т.п. и получают сигналы управления от контроллера 12, органов управления 13 или от других устройств трансмиссии в зависимости от ее конструктивного исполнения.
Для правильной коммутации фаз тяговые электродвигатели 4, 5 требуют обратной связи по положению ротора. В общем случае для выполнения такого требования используются различных датчики положения - энкодеры, датчики Холла и т.д. Однако введение механических датчиков приводит к усложнению трансмиссии и снижению ее надежности. Поэтому целесообразна реализация бессенсорных алгоритмов управления, большинство их которых основано на оценке потокосцепления. Общий смысл этих алгоритмов состоит в расчете реального потокосцепления фаз тягового электродвигателя и использовании отношения реального потокосцепления к некоторому справочному значению для оценки положения ротора.
В этом случае микроконтроллер (цифровой сигнальный процессор) инвертора 4, 5 осуществляет измерение ЭДС и, при необходимости, тока фазных (статорных) обмоток и далее цифровыми методами определяет текущее положение ротора.
В исходном состоянии трансмиссии токи возбуждения тягового генератора 1 и тяговых электродвигателей 4, 5 устанавливаются на уровне, соответствующем максимальному КПД трансмиссии в номинальном режиме ее работы. При этом обеспечивается постоянство тяговой мощности машины в определенном (как правило, в 2..3-кратном) диапазоне изменения скоростей ее движения.
Внутри этого диапазона рабочая скорость машины может регулироваться инверторами 10, 11 в зависимости от положений органов управления 13 без изменения токов возбуждения тягового генератора 1 и тяговых электродвигателей 4, 5.
При выходе за пределы этого диапазона при помощи контроллера 12 или иного устройства осуществляется изменение токов возбуждения тягового генератора 1 и тяговых электродвигателей 4, 5 из условия формирования тяговой характеристики самоходной машины гиперболического вида - стабилизации тяговой мощности самоходной машины в максимально широком диапазоне скоростей ее движения.
А именно, при снижении скорости движения машины осуществляется увеличение тока возбуждения тяговых электродвигателей, что приводит к увеличению тягового усилия самоходной машины. Для увеличения скорости движения самоходной машины осуществляется снижение тока возбуждения тяговых электродвигателей.
При высоких скоростях движения машины мощность тяговых электродвигателей и, соответственно, тяговая мощность машины может оказаться недостаточной, поскольку индуктивности обмоток ее фаз ограничивают скорость нарастания тока в обмотках. В этом случае для сохранения высокой тяговой мощности самоходной машины необходимо увеличение рабочего напряжения +Uc, -Uc в силовой цепи трансмиссии. Это достигается путем увеличения тока возбуждения тягового генератора 1.
В предложенной трансмиссии возможна реализация оптимального регулирования тока возбуждения тягового генератора 1 в зависимости от скорости движения и/или тяговой нагрузки машины, в частности, из условия достижения максимального КПД или максимальной выходной мощности трансмиссии в зависимости от режима работы машины, выбранного оператором с помощью органов управления 13 - при заданной величине тяговой мощности, тягового усилия, или скорости движения машины. Величина тягового усилия машины при этом может быть вычислена на основании результатов измерения крутящих моментов тяговых электродвигателей 4, 5.
В случае, если мощности ДВС 2 недостаточно для поддержания заданной оператором скорости движения машины при текущем значении ее тягового усилия (сопротивления передвижению), то регулирование осуществляется из условия достижения скорости движения машины, максимально возможной в данных условиях.
Возможна также реализация оптимального взаимосвязанного управления токами возбуждения генератора и электродвигателей, инверторами тяговых электродвигателей и ДВС (контроллером 14) по различным критериям - из условия достижения максимальной тяговой мощности машины, заданной величины скорости движения машины, заданной величины тяговой мощности машины или максимального КПД трансмиссии, в зависимости от заданного оператором режима работы самоходной машины. В частности, режимов стабилизации или поддержания заданной величины тяговой мощности или скорости движения машины.
Алгоритмы указанного оптимального управления зависят от конструкции самоходной машины и технологического процесса, выполняемого машиной. Эти алгоритмы предварительно определяются расчетным или экспериментальным путем, записываются в память контроллера 12 и далее программно реализуются микроконтроллером, входящим в его состав.
Для специалистов в данной области техники понятно, что кроме описанной электромеханической трансмиссии самоходной машины возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Источники информации
1. BY 5907 U, В60К 17/00, В60L 11/00, 28.02.2010.
2. RU 2376158 С2, В60К 17/00, Н02Р 8/00, 20.12.2009.
3. Лашкевич М.М. Разработка системы управления для электротрансмиссии с тяговыми вентильно-индукторными двигателями: дис. …кандидата технических наук: 05.09.03. – Москва: ФГБОУ ВПО «НИУ «МЭИ», 2013. – 155 с.
Изобретение относится к самоходным рабочим машинам. Электромеханическая трансмиссия самоходной машины содержит тяговый генератор, соединенный с двигателем внутреннего сгорания, тяговый электродвигатель, бортовые редукторы привода ведущих колес или гусениц машины, связанные с тяговым электродвигателем. Тяговый генератор и/или тяговый электродвигатель выполнен реактивным индукторным и содержит ротор, на валу которого закреплен зубчатый магнитопровод, и статор с полюсами и обмотками якоря, выполненными в виде сосредоточенных катушек. Тяговый генератор и/или тяговый электродвигатель выполнен с совмещенными обмотками возбуждения и якоря, или с магнитоэлектрическим возбуждением, или с комбинированным возбуждением с использованием магнитоэлектрического возбуждения и совмещенных обмоток возбуждения и якоря, или с обмотками, каждая из которых поочередно используется в качестве обмотки возбуждения или якоря в зависимости от положения ротора. Повышается надежность трансмиссии. 19 з.п. ф-лы, 1 ил.
1. Электромеханическая трансмиссия самоходной машины, содержащая по меньшей мере один тяговый генератор, функционально соединенный с двигателем внутреннего сгорания (ДВС) и выполненный с возможностью преобразования по меньшей мере части механической энергии ДВС в электрическую энергию, по меньшей мере один тяговый электродвигатель, приспособленный для преобразования электрической энергии в механическую энергию, бортовые редукторы, приспособленные для привода ведущих колес или гусениц самоходной машины и связанные по меньшей мере с одним тяговым электродвигателем непосредственно или по меньшей мере через одно передаточное устройство, причем по меньшей мере один тяговый генератор и/или тяговый электродвигатель выполнен реактивным индукторным и содержит ротор, на валу которого закреплен зубчатый магнитопровод, и статор с полюсами и обмотками якоря, выполненными в виде сосредоточенных катушек, при этом по меньшей мере один тяговый генератор и/или тяговый электродвигатель выполнен с совмещенными обмотками возбуждения и якоря, или с магнитоэлектрическим возбуждением, или с комбинированным возбуждением с использованием магнитоэлектрического возбуждения и совмещенных обмоток возбуждения и якоря, или с обмотками, каждая из которых поочередно используется в качестве обмотки возбуждения или якоря в зависимости от положения ротора.
2. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что фазные обмотки якоря по меньшей мере одного тягового генератора и/или тягового электродвигателя соединены по схеме треугольника или многоугольника, а в каждую из фаз последовательно включены диоды.
3. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она имеет источник тока возбуждения по меньшей мере одного тягового генератора и/или тягового электродвигателя, фазные обмотки якоря которого/которых соединены по схеме треугольника или многоугольника, причем в каждую из фаз последовательно включены диоды, а источник тока возбуждения подключен к диоду, включенному последовательно в одну из его фаз.
4. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она имеет источник тока возбуждения по меньшей мере одного тягового генератора и/или тягового электродвигателя, подключенный по меньшей мере к одной совмещенной обмотке возбуждения и якоря таким образом, что магнитодвижущая сила тока нагрузки и тока возбуждения в этой обмотке направлены согласованно или встречно в зависимости от режима работы электромеханической трансмиссии.
5. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что магнитопровод по меньшей мере одного тягового генератора и/или тягового электродвигателя выполнен таким образом, что каждая пара зубцов статора является отдельной фазой и при этом образует магнитный поток возбуждения.
6. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что магнитопровод по меньшей мере одного тягового генератора и/или тягового электродвигателя выполнен с возможностью размещения обмотки возбуждения и обмотки якоря на одних и тех же зубцах статора.
7. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что ротор по меньшей мере одного тягового генератора и/или тягового электродвигателя имеет четное число зубцов и не содержит обмоток и постоянных магнитов.
8. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она содержит многофазный силовой выпрямитель, встроенный в тяговый генератор или подключенный к нему и приспособленный для преобразования энергии переменного тока тягового генератора в энергию постоянного тока, передаваемую по меньшей мере на один тяговый электродвигатель.
9. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она содержит по меньшей мере один мостовой инвертор, приспособленный для преобразования энергии постоянного тока в энергию переменного тока, передаваемую по меньшей мере на один тяговый электродвигатель, причем мостовой инвертор встроен в тяговый электродвигатель или включен последовательно в силовую цепь между тяговым генератором и тяговым электродвигателем.
10. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она содержит по меньшей один регулируемый источник тока возбуждения по меньшей мере одного тягового генератора и/или тягового электродвигателя, приспособленный для формирования тяговой характеристики самоходной машины гиперболического вида.
11. Электромеханическая трансмиссия по п. 10, отличающаяся тем, что регулируемый источник тока возбуждения выполнен с возможностью стабилизации тяговой мощности самоходной машины при изменении скорости движения и/или тягового усилия этой машины.
12. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит по меньшей один регулируемый источник тока возбуждения по меньшей мере одного тягового генератора, приспособленный для изменения напряжения на выходе генератора в зависимости от скорости движения и/или тяговой нагрузки машины из условия достижения максимального КПД или максимальной выходной мощности трансмиссии при заданной величине тяговой мощности, или тягового усилия, или скорости движения машины.
13. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит по меньшей один регулируемый источник тока возбуждения и/или мостовой инвертор по меньшей мере одного тягового электродвигателя, а также контроллер, приспособленный для управления этим источником тока и/или инвертором, причем указанное управление реализовано из условия достижения максимальной тяговой мощности машины, или заданной величины скорости движения машины, или заданной величины тяговой мощности машины, или максимального КПД трансмиссии при заданной величине тяговой мощности или скорости движения машины.
14. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит по меньшей один регулируемый источник тока возбуждения и/или мостовой инвертор по меньшей мере одного тягового электродвигателя, а также контроллер, приспособленный для управления этим источником тока, и/или инвертором, и/или ДВС, причем указанное управление реализовано из условия достижения максимальной тяговой мощности машины, или заданной величины скорости движения машины, или заданной величины тяговой мощности машины, или максимального КПД трансмиссии при заданной величине тяговой мощности или скорости движения машины.
15. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит по меньшей один источник тока возбуждения по меньшей мере одного тягового генератора и/или тягового электродвигателя, который выполнен в виде дополнительного генератора, соединенного с ДВС, или в виде дополнительных обмоток тягового генератора, соединенных с дополнительным выпрямителем, или в виде преобразователя напряжения силовой цепи генератора, или в виде преобразователя напряжения низковольтного электрооборудования самоходной машины.
16. Электромеханическая трансмиссия по п. 15, отличающаяся тем, что источник тока возбуждения содержит два или более гальванически развязанных выходных канала и приспособлен для независимого управления величиной выходного тока каждого канала.
17. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что по меньшей мере один тяговый генератор или тяговый электродвигатель имеет жидкостное охлаждение, которое выполнено автономным или объединено с системой охлаждения ДВС.
18. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит по меньшей мере один орган управления трансмиссией, который соединен по меньшей мере с одним источником тока возбуждения и/или по меньшей мере с одним инвертором.
19. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит по меньшей мере один орган управления трансмиссией и/или панель оператора, а также контроллер, который соединен с органом управления трансмиссией и/или с панель оператора, а также по меньшей мере с одним источником тока возбуждения и/или по меньшей мере с одним инвертором.
20. Электромеханическая трансмиссия по п. 19, отличающаяся тем, что указанное соединение осуществляется с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров) и/или LIN (Local Interconnéct Network - локальная сеть).
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2007 |
|
RU2376158C2 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2540679C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГОВЫЙ МОДУЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2545249C1 |

