Изобретение относится к области авиационной или ракетной техники, а именно к измерению необходимых при исследовании флаттера частотных характеристик (парциальных частот) управляемой поверхности (УП) летательного аппарата (ЛА). Используя парциальные частоты управляемых поверхностей, можно вычислить (зная осевые моменты инерции управляемых поверхностей) жесткости на вращение и на изгиб заделки этих поверхностей на корпус ЛА и затем, вводя эти жесткости в математические модели ЛА, выполнить расчет на флаттер ЛА.
При решении задач обеспечения безопасности летательных аппаратов от явления флаттера управляемых поверхностей, наряду с основными частотными характеристиками этих объектов - резонансными (собственными) частотами и формами колебаний, а также параметрами затухания, важное место занимают парциальные частоты управляемых поверхностей. Как правило, управляемая поверхность имеет два первых тона собственных тона колебаний с частотами, отличными от нуля, условно называемые "изгиб" и "вращение". За счет связи тонов через силы инерции, вызванные ненулевым центробежным моментом инерции, форма колебаний изгибного тона включает часть формы тона вращения, а форма тона вращения имеет добавку формы тона изгиба. При расчетах на флаттер необходимы частоты парциальных тонов управляемой поверхности с "чистыми" вращением и изгибом, т.е. с узловыми линиями вдоль оси вращения и оси перпендикулярной ей и проходящей через точку, близкую к точке пересечения этой оси с поверхностью корпуса ЛА соответственно.
В настоящее время парциальные частоты УП определяют следующим образом: при проведении любых модальных испытаний управляемой поверхности определяют собственные частоты и формы управляемой поверхности, потом, используя имеющиеся расчетные или экспериментальные данные, по осевым и центробежному моменту инерции управляемой поверхности, а также собственным формам и собственным частотам управляемой поверхности можно сформировать математическую модель управляемой поверхности. Затем по данным математической модели управляемой поверхности, а именно осевым моментам инерции УП, численно определяются ее парциальные частоты. Потом математическую модель управляемой поверхности состыковывают с математической моделью корпуса ЛА посредством математической модели пружин, работающих на вращение и изгиб соответственно (жесткости этих пружин определяются по парциальным частотам и осевым моментам инерции). В результате возникают ошибки из-за погрешностей, как при расчетном или экспериментальном определении указанных выше моментов инерции, так и при формировании математической модели управляемой поверхности. Этих ошибок лишено предлагаемое изобретение, которое позволяет определять парциальные частоты непосредственно из эксперимента.
Существует часто используемый метод модальных испытаний - метод фазового резонанса. Теоретическое обоснование этого метода разрабатывалось с 50-х годов 20-го века, а технические возможности его реализации появились в 60-е-70-е годы. К этому времени были разработаны электродинамические силовозбудители с подходящими для испытаний авиационных конструкций характеристиками, было создано необходимое электронное оборудование. С помощью электродинамических силовозбудителей можно было подавать одновременно в несколько точек конструкции гармонические силы с заданным распределением амплитуд и фаз. С этого времени метод и его модификации разрабатывались весьма активно. Однако метод фазового резонанса непосредственно не определяет парциальные частоты вращения и изгиба управляемых поверхностей, он определяет их собственные частоты.
Существуют также методы модальных испытаний, основанные на «фазовом разделении», в которых возбуждают и измеряют частотные и переходные характеристики в одной или многих точках конструкции в широком диапазоне частот. Хотя процесс этих испытаний проще, чем процесс испытаний методом фазового резонанса, полученный при этом огромный массив данных требует сложной обработки и высокой квалификации исполнителей при анализе результатов. Однако эти методы непосредственно не определяют парциальные частоты вращения и изгиба управляемых поверхностей, они определяют их собственные частоты.
Кроме того, существуют методы модальных испытаний, связанные либо с быстрой перестройкой частоты вынужденных колебаний, либо с кратковременным ударом, либо с шумом с различным частотным спектром. Однако эти методы непосредственно не определяют парциальные частоты вращения и изгиба управляемых поверхностей, они определяют их собственные частоты.
И наконец, существуют методы бесконтактного измерения частотных характеристик летательных аппаратов. Однако в этих методах управляемая поверхность крепится не к корпусу летательного аппарата, а к некоторой жесткой конструкции, не имеющей ничего общего с конструкцией корпуса летательного аппарата, при этом точность моделирования жесткостных характеристик крепления может оказаться невысокой. Кроме того, эти методы непосредственно не определяют парциальные частоты вращения и изгиба управляемых поверхностей, они определяют их собственные частоты.
Аналогом на способ является изобретение А.В. Смотрова "Способ измерения частотных характеристик механических конструкций (Патент №2237884, МПК G01N 21/62).
Указанный способ относится к бесконтактным оптическим способам измерения основных частотных характеристик малогабаритных и легких механических конструкций. В данном способе конструкцию закрепляют в интерферометре, формируют опорную и предметную оптические волны, используя голографическую интерферометрию в реальном времени, получают голограмму неподвижной конструкции, проявляют голограмму на месте или точно возвращают в исходное положение, освещают конструкцию и голограмму, возбуждают колебания конструкции, постепенно изменяя частоту внешней силы, производят поиск и регистрацию частот резонансных колебаний исследуемой конструкции, при этом через голограмму ведут наблюдение одновременно распространяющихся за голограммой световой волны от вибрирующей конструкции и восстановленной голограммой световой волны от неподвижной конструкции, результат интерференции этих волн усредняют при регистрации, используя голографическую интерферометрию с усреднением по времени, регистрируют на голографических фотопластинках интерферограммы форм колебаний испытываемой конструкции при вибрации на резонансных частотах, голографические фотопластинки после регистрации подвергают типовой фотообработке, восстанавливают интерференционные картины форм колебаний испытываемой конструкции, производят считывание числа и положения интерференционных линий, для каждой интерференционной картины производят расчет полей амплитуд колебаний исследуемой конструкции с использованием таблиц функции Бесселя нулевого порядка, при этом возбуждают исследуемую конструкцию и регистрируют интерферограммы форм колебаний дополнительно на нескольких, достаточных для построения резонансной кривой, околорезонансных частотах, а для конкретной формы колебаний испытываемой конструкции на основе количественного анализа интерференционных картин определяют зависимость амплитуды или деформации от частоты возбуждающей силы, по которой по методу резонансной кривой определяют искомые частотные характеристики испытываемой конструкции.
Недостатками указанного выше изобретения являются:
1. использование дорогостоящего оборудования (интерферометра);
2. использование сложных операций, связанных с голографической интерферометрией;
3. невозможность экспериментально определить парциальные частоты управляемой поверхности.
Прототипом на способ является способ определения парциальных частот управляемой поверхности с использований модальных испытаний по методу фазового резонанса и проведения дополнительных расчетов (см. книгу: Карклэ П.Г., Смыслов В.И., Модальные испытания летательных аппаратов и воспроизведение силовых воздействий. Москва, 2017, стр. 65-67, Справочник в 6 томах. Вибрации в технике. Измерения и испытания (том 5). Москва: Машиностроение. 1981, стр. 330-348, Энциклопедия, раздел IV. Расчет и конструирование машин. Том IV-21.Самолеты и вертолеты. Книга 1. Аэродинамика, динамика полета и прочность. Москва: Машиностроение. 2002, стр. 684-689).
В данном способе закрепляют летательный аппарат или его отсек с приводами управляемых поверхностей и самими управляемыми поверхностями, прикрепляют к управляемой поверхности вибродатчики и силовозбудители электродинамического типа, подают электрическое питание, проводят модальные испытания по методу фазового резонанса, в процессе которых изменяют силы и частоту вынужденных колебаний, сигналы с датчиков усиливают по амплитуде и передают в систему сбора данных, где определяют форму собственных колебаний УП и наличие фазового резонанса, из системы сбора данных сигналы с вибродатчиков передают в генератор гармонических сигналов с блоками подбора сил, где формируют силовое гармоническое воздействие силовозбудителей на управляемую поверхность в ручном или автоматическом режиме, из генератора гармонических сигналов с блоками подбора сил сигналы передают в усилители мощности, где сигналы усиливают по мощности и передают на силовозбудители электродинамического типа, проводят дополнительные расчеты или дополнительные расчеты и дополнительные эксперименты для определения моментов инерции управляемой поверхности, после чего определяют парциальных частот управляемой поверхности.
Недостатком данного способа является невозможность экспериментального определения парциальных частот управляемой поверхности. Для определения парциальных частот необходимо провести дополнительные эксперименты по определению моментов инерции управляемой поверхности и дополнительные расчеты, которые создадут дополнительные ошибки.
Аналогом на устройство является устройство, описанное в изобретении А.В. Смотрова "Способ измерения частотных характеристик механических конструкций" (Патент №2237884, МПК G01N 21/62).
Изобретение относится к бесконтактным оптическим способам измерения основных частотных характеристик малогабаритных и легких механических конструкций.
Устройство содержит интерферометр, регистрирующее устройство, гелий-неоновый лазер, светоделитель, голографические фотопластины, микрообъектив, синусоидальный генератор электрических колебаний, возбудитель колебаний.
Недостатком аналога является невозможность определения парциальных частот управляемой поверхности, это устройство способно определить только собственные частоты управляемой поверхности.
Наиболее близким техническим решением, принятым за прототип, является устройство при проведении модальных испытаний по методу фазового резонанса (другое название этих испытаний - резонансные испытания, еще одно название - наземные частотные испытания (НЧИ)) (см. книгу: Карклэ П.Г., Смыслов В.И., Модальные испытания летательных аппаратов и воспроизведение силовых воздействий. Москва, 2017, стр. 65-67, Справочник в 6 томах. Вибрации в технике. Измерения и испытания (том 5). Москва: Машиностроение. 1981, стр. 330-348, Энциклопедия, раздел IV. Расчет и конструирование машин. Том IV-21. Самолеты и вертолеты. Книга 1. Аэродинамика, динамика полета и прочность. Москва: Машиностроение. 2002, стр. 684-689).
Прототип содержит вибродатчики - датчики, регистрирующие колебания и прикрепленные к управляемой поверхности (УП) летательного аппарата (ЛА), усилители сигналов от датчиков, коммутаторы, силовозбудители электродинамического типа, прикрепленные к УП, усилители мощности (УМ), генератор гармонических сигналов (ГГС) с блоками подбора сил (БПС), система сбора данных (ССД) (блок анализа и регистрации), при этом выход датчиков связан с входом усилителей сигналов с датчиков, выход усилителей сигналов с датчиков связан с входом коммутаторов, выход коммутаторов связан с входом ССД, выход ССД связан с входом ГГС с БПД, выход ГГС с БПД связан с входом усилителей мощности, выход усилителей мощности связан с входом силовозбудителей электродинамического типа, выход силовозбудителей электродинамического типа связан с управляемой поверхностью.
Недостатком прототипа является невозможность экспериментального определения парциальных частот управляемой поверхности, для определения парциальных частот управляемой поверхности необходимо выполнить дополнительные эксперименты по определению моментов инерции управляемой поверхности и дополнительные расчеты, которые создадут дополнительные ошибки.
Техническим результатом является уменьшение времени и увеличение точности при определении парциальных частот управляемой поверхности.
Технический результат достигается тем, что в способе определения парциальных частот управляемой поверхности летательного аппарата, при котором закрепляют в пространстве летательный аппарат или его отсек с управляемой поверхностью и ее приводами, прикрепляют к управляемой поверхности вибродатчики и силовозбудители, проводят модальные испытания по методу фазового резонанса и изменяют силы и частоту вынужденных колебаний управляемой поверхности, изменения сил и частоты вынужденных колебаний начинают с собственной частоты искомого тона, определенной при модальных испытаниях, наблюдают за положением узловой линии, за условием выполнения фазового резонанса, а также за показаниями датчиков с определением действительной части и модуля угловой амплитуды неопределяемого тона, и определяют парциальную частоту определяемого тона вращения или изгиба, исходя из одновременного соблюдения, как минимум, следующих условий: положение узловой линии колеблющейся поверхности соответствует определяемому парциальному тон, выполняется условие фазового резонанса, выполняется условие равенства нулю действительной части угловой амплитуды неопределяемого тона, выполняется условие равенства нулю модуля угловой амплитуды неопределяемого тона.
Определение положения узловой линии колеблющейся поверхности, соответствующей определяемому парциальному тону, выполнение условия фазового резонанса, выполнение условия равенства нулю действительной части угловой амплитуды неопределяемого тона, выполнение условия равенства нулю модуля угловой амплитуды неопределяемого тона производится с заданными погрешностями. Наблюдают за показаниями датчиков с определением действительной части угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, что является первым сигналом определяемого тона, и за показаниями датчиков с определением модуля угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, что является вторым сигналом определяемого тона, и выбирают варианты изменения сил и частоты вынужденных колебаний.
Изменения сил осуществляют путем пошагово или непрерывно в ручном или автоматическом режиме. Для учета влияния нелинейностей, а именно, трения и люфтов элементов конструкции управления управляемой поверхностью, изменяют силы для обеспечения поддержания постоянства амплитуды искомого тона форм колебаний.
Технический результат достигается также тем, что устройство определения парциальных частот управляемой поверхности летательного аппарата, содержащее соединенные последовательно прикрепляемые к управляемой поверхности вибродатчики, усилители сигналов от вибродатчиков, коммутаторы, систему сбора данных, генератор гармонических сигналов с блоками подбора сил, усилители мощности, прикрепляемые к управляемой поверхности силовозбудители, дополнительно содержит блок индикации парциальных тонов, входы которого соединены с выходами коммутаторов, а выход - с системой сбора данных. Блок индикации парциальных тонов содержит устройство вычисления первого сигнала индикации парциального тона, равного действительной части угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, а также устройство вычисления второго сигнала индикации парциального тона, равного модулю угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона.
Перечень фигур:
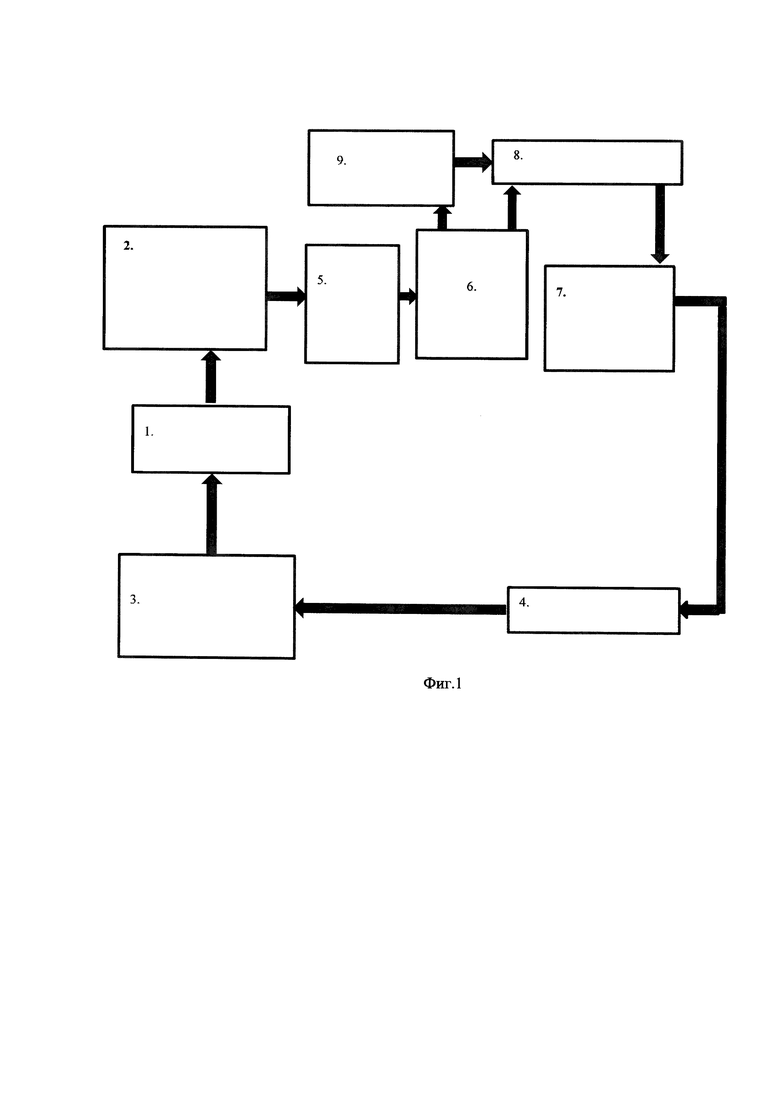
на Фиг. 1 изображено устройство определения парциальных частот управляемой поверхности,
на Фиг. 2 изображена математическая модель управляемой поверхности,
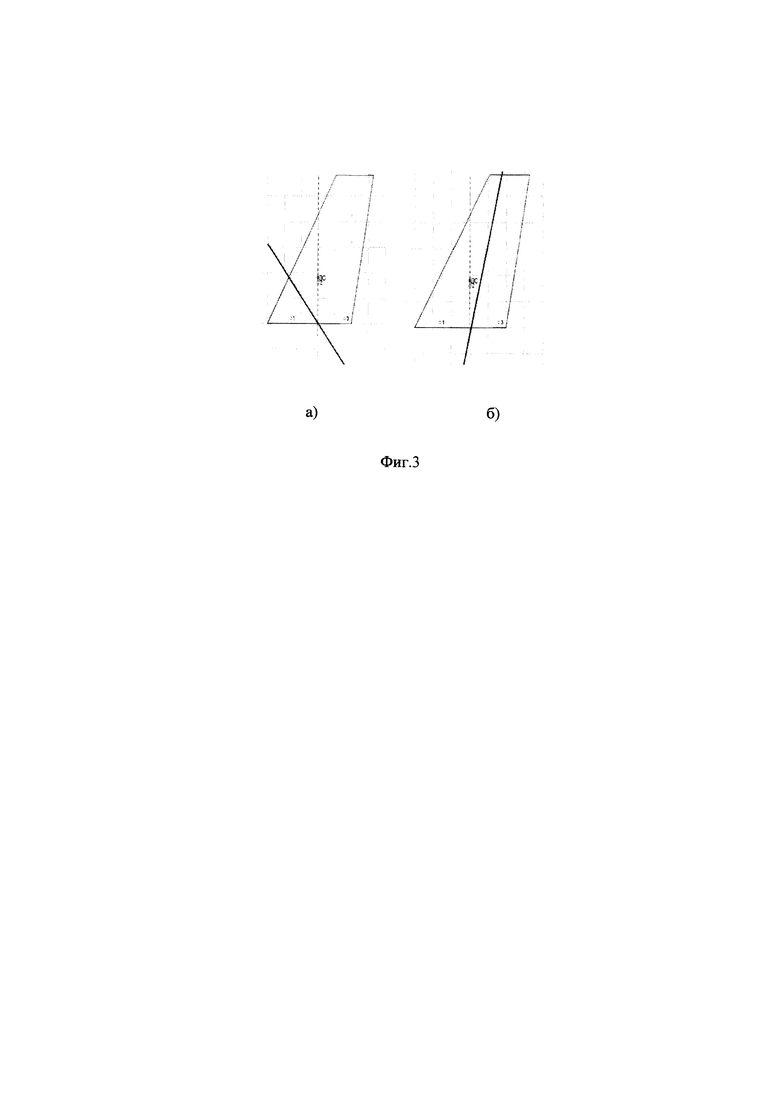
на Фиг. 3 изображены узловые линии: а) - собственного тона «изгиба» и б) - собственного тона «вращения» управляемой поверхности.
На Фиг. 1 изображены следующие элементы:
- управляемая поверхность (УП) ЛА 1; и элементы, входящие в состав устройства для определения парциальных частот управляемых поверхностей:
- прикрепленные к управляемой поверхности ЛА вибродатчики 2;
- прикрепленные к управляемой поверхности ЛА силовозбудители (СВ)
электродинамического типа 3;
- усилители мощности (УМ) 4;
- усилители сигналов с датчиков 5;
- коммутаторы 6;
- генератор гармонических сигналов (ГГС) с блоками подбора сил (БПС) 7;
- система сбора данных (ССД) 8;
- блок индикации парциальных тонов (БИПЦ) 9.
Отметим, что перечисленные выше элементы 2-8 присутствуют при проведении модальных испытаний по методу фазового резонанса.
В устройстве выход с вибродатчиков 2 связан с входом усилителей сигналов с вибродатчиков 5, выход усилителей сигналов с вибродатчиков 5 связан с входом в коммутаторов 6, первый выход коммутаторов 6 связан с входом блоком индикации парциальных тонов 9, выход блока индикации парциальных тонов 9 связан с входом системы сбора данных 8, второй выход коммутаторов 6 связан с входом системы сбора данных 8, выход из системы сбора данных 8 связан с входом генератора гармонических сигналов с блоками подбора сил 7, выход генератора гармонических сигналов с блоками подбора сил 7 связан с входом усилителей мощности 4, выход усилителей мощности 4 связан с входом силовозбудителей электродинамического типа 3, выход силовозбудителей электродинамического типа 3 связан с управляемой поверхностью 1. Вибродатчики 5 расположены на управляемой поверхности 1.
Способ осуществляют следующим образом: закрепляют в пространстве летательный аппарат или его отсек с управляемой поверхностью и ее приводами, прикрепляют к управляемой поверхности вибродатчики 2 и два силовозбудителя электродинамического типа 3, точки приложения сил которых расположены по разные стороны от оси вращения УП на одинаковом расстоянии от оси вращения УП и на одинаковом расстоянии от заделки оси вращения УП на корпусе ЛА проекции точек приложения сил на эту ось, подают электрическое питание, в том числе и на привод УП для обеспечения его рабочего состояния (от выполнения этого условия зависит правильность задания жесткостей привода в математической модели УП), проводят модальные испытания УП по методу фазового резонанса, в процессе которых изменяют силы и частоты вынужденных колебаний управляемой поверхности, определяют собственные частоты тонов вращения и изгиба УП, задают определенную выше собственную частоту вращения в качестве начальной, задают начальные значения действительных составляющих сил, при комплексном представлении сил, или сил синусоидального вида от двух силовозбудителей (имеются возможности изменения отношения и уровня действительных составляющих сил, как пошагово, так и непрерывно), равных по величине и противоположных по знаку (это условие будет выполняться в дальнейшем) и проводят ряд испытаний, изменяя значения действительных составляющих сил и вводя при этом мнимую (мнимые) составляющую (составляющие) силы (сил), то есть силы (сил) косинусоидального вида (имеются возможности изменения отношения и уровня мнимых составляющих сил, как пошагово, так и непрерывно), наблюдают при этом за положением узловой линии, за выполнением условия фазового резонанса и за значениями первого и второго сигнала индикации парциального тона вращения (эти сигналы определяются по показаниям датчиков в режиме реального времени в блоке индикации парциальных тонов; первый сигнал индикации равен действительной части угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, второй сигнал индикации равен модулю угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона), до тех пор, пока не произошло одновременное соблюдение следующих четырех условий:
1) положение узловой линии соответствует искомому парциальному тону (с устраиваемой экспериментатора точностью);
2) произошло выполнение условия фазового резонанса (с устраиваемой экспериментатора точностью);
3) первый сигнал индикации искомого парциального тона равен нулю (с устраиваемой экспериментатора точностью), который определяется по показаниям датчиков, представляющими собой действительную часть угловой амплитуды неопределяемого тона, деленную на модуль угловой амплитуды определяемого тона;
4) второй сигнал индикации искомого парциального тона равен нулю (с устраиваемой экспериментатора точностью), который определяется по показаниям датчиков представляющими собой модуль угловой амплитуды неопределяемого тона, деленный на модуль угловой амплитуды определяемого тона соответственно;
для определения парциальной частоты изгиба УП, задают определенную выше собственную частоту изгиба в качестве начальной, задают начальные значения действительных составляющих сил, равных по величине и по знаку (это условие будет выполняться в дальнейшем) и проводят ряд испытаний, подобных испытаниям, описанным выше; дальнейшие действия совпадают с действиями, описанными выше.
ТЕОРЕТИЧЕСКОЕ ОБОСНОВАНИЕ ВОЗМОЖНОСТИ ВЫПОЛНЕНИЯ ПРЕДЛАГАЕМОГО ИЗОБРЕТЕНИЯ
Вынужденные колебания управляемой поверхности, с жесткостями на изгиб и вращение в координатах Ox, Oz (см. Фиг. 2), условно называемых парциальными, под действием гармонических сил F1 F2 в комплексном виде имеют вид:

где K, D - диагональные матрицы жесткости и демпфирования, I - матрица моментов инерции, Ψ, М - векторы углов поворота и моментов сил. Эта математическая модель управляемой поверхности обычно употребляется (см. С.Г. Парафесь, В.И. Смыслов. Методы и средства обеспечения аэроупругой устойчивости беспилотных летательных аппаратов. Москва. Издательство МАИ. 2013 г.).
На частоте фазового резонанса моменты сил возбуждения (моменты имеют действительные значения, образованы силами с действительными значениями) - М компенсируют силы демпфирования:

из первого уравнения определяются две собственных частоты и две собственных формы системы без демпфирования. Собственные формы являются типичной комбинацией «чистых» форм изгиба и вращения, которые называем парциальными, соответствующие узловые линии показаны на Фиг. 3.
При добавлении мнимой составляющей возбуждения сил возбуждения - создающей мнимую составляющую моментов сил возбуждения, компенсирующей демпфирование на частоте фазового резонанса и приводящих матрицу инерции к диагональному виду, при определенном соотношении действительной и мнимой составляющей моментов сил возбуждения, можно получить парциальные колебания УП изгиба и вращения с новыми, парциальными собственными частотами:

где I0 - матрица I лишь с диагональными элементами, I1 - матрица I лишь с недиагональными, элементами, M1 - момент сил возбуждения, имеющий действительную и мнимую составляющие.
Влияние нелинейных свойств привода устраняется проведением измерений с поддерживанием постоянства амплитуды колебаний, путем изменения общих уровней действительной и мнимой составляющей сил возбуждения.
Парциальные жесткости определяются соотношениями для одностепенных систем, при необходимости масса подвижных систем возбудителей может быть добавлена в расчетной схеме:

где kx и kx относятся, соответственно, к ωz - «чистому» вращению вокруг оси Oz и к ωх - «чистому» изгибу - повороту вокруг оси Ох.
Техническим результатом является уменьшение времени и увеличение точности при определении парциальных частот управляемой поверхности. Напомним (см. стр. 1-2 данного описания), что уменьшение времени происходит из-за отсутствия дополнительных экспериментов для определения моментов инерции управляемой поверхности (эти эксперименты могут занять одну неделю и более), если определить моменты инерции с помощью расчетов с той же точностью, как и при указанных выше экспериментах, понадобится достаточно подробная математическая модель управляемой поверхности, формирование которой может занять также не менее одной недели, а увеличение точности происходит из-за отсутствия дополнительных расчетов, так как парциальные частоты по предлагаемому изобретению определяются непосредственно из эксперимента.
В настоящее время собран стенд с динамически подобной моделью управляемой поверхности, а именно переднего горизонтального оперения, согласно представленному изобретению. Предварительно выполненные работы на этом стенде по подбору действительных и мнимых составляющих сил двух силовозбудителей, доказали правильность теоретического обоснования возможности выполнения предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения обобщенных параметров колебаний конструкций по частотным характеристикам | 2020 |
|
RU2758152C1 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КРУПНОМАСШТАБНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2104508C1 |
| Способ определения параметров собственных тонов колебаний конструкций в резонансных испытаниях | 2017 |
|
RU2658125C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕШИВАНИЯ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1978 |
|
RU692347C |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| Способ определения собственных частот и форм колебаний свободной конструкции по результатам испытаний этой конструкции с наложенными связями | 2019 |
|
RU2728329C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2568959C1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ РЕЗОНАНСА КОНСТРУКЦИИ | 1973 |
|
SU386303A1 |
| Способ вибрационных испытаний сложной конструкции и устройство для его осуществления | 1976 |
|
SU739976A1 |

Изобретение относится к области авиационной или ракетной техники, а именно к измерению необходимых при исследовании флаттера частотных характеристик (парциальных частот) управляемой поверхности (УП) летательного аппарата (ЛА). Предлагается способ, в котором закрепляют в пространстве летательный аппарат или его отсек с управляемой поверхностью и ее приводами, прикрепляют к управляемой поверхности вибродатчики и силовозбудители электродинамического типа, точки приложения сил которых расположены по разные стороны от оси вращения УП на одинаковом расстоянии от оси вращения УП и на одинаковом расстоянии от заделки оси вращения УП на корпусе ЛА проекции точек приложения сил на эту ось, собирают остальные элементы устройства, описанные ниже в описании устройства изобретения, подают электрическое питание, в том числе и на привод УП для обеспечения его рабочего состояния. Проводят модальные испытания УП по методу фазового резонанса и определяют собственные частоты тонов вращения и изгиба УП, задают определенную выше собственную частоту вращения в качестве начальной, задают начальные значения действительных составляющих сил от двух силовозбудителей, при комплексном представлении сил, или сил синусоидального вида, равных по величине и противоположных по знаку (это условие будет выполняться в дальнейшем) и проводят ряд испытаний, изменяя значения действительных составляющих сил и вводя при этом мнимую (мнимые) составляющую (составляющие) силы (сил), то есть силы (сил) косинусоидального вида (имеются возможности изменения отношения и уровня мнимых составляющих сил, как пошагово, так и непрерывно). Наблюдают при этом за положением узловой линии, за выполнением условия фазового резонанса и за значениями первого и второго сигнала индикации парциального тона вращения (эти сигналы определяются по показаниям датчиков в режиме реального времени в блоке индикации парциальных тонов; первый сигнал индикации равен действительной части угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, второй сигнал индикации равен модулю угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона), до тех пор, пока не произошло одновременное соблюдение четырех условий. Для определения парциальной частоты изгиба УП, задают определенную выше собственную частоту изгиба в качестве начальной, задают начальные значения действительных составляющих сил, равных по величине и по знаку (это условие будет выполняться в дальнейшем) и проводят ряд испытаний, подобных испытаниям, описанным выше; дальнейшие действия совпадают с действиями, описанными выше. Устройство содержит прикрепленные к управляемой поверхности ЛА вибродатчики, прикрепленные к управляемой поверхности ЛА силовозбудители (СВ) электродинамического типа, усилители мощности (УМ), усилители сигналов с датчиков, коммутаторы, генератор гармонических сигналов (ГТС) с блоками подбора сил (БПС), система сбора данных (ССД), блок индикации парциальных тонов (БИПЦ). Техническим результатом является уменьшение времени и увеличение точности при определении парциальных частот управляемой поверхности. 2 н. и 5 з.п. ф-лы, 3 ил.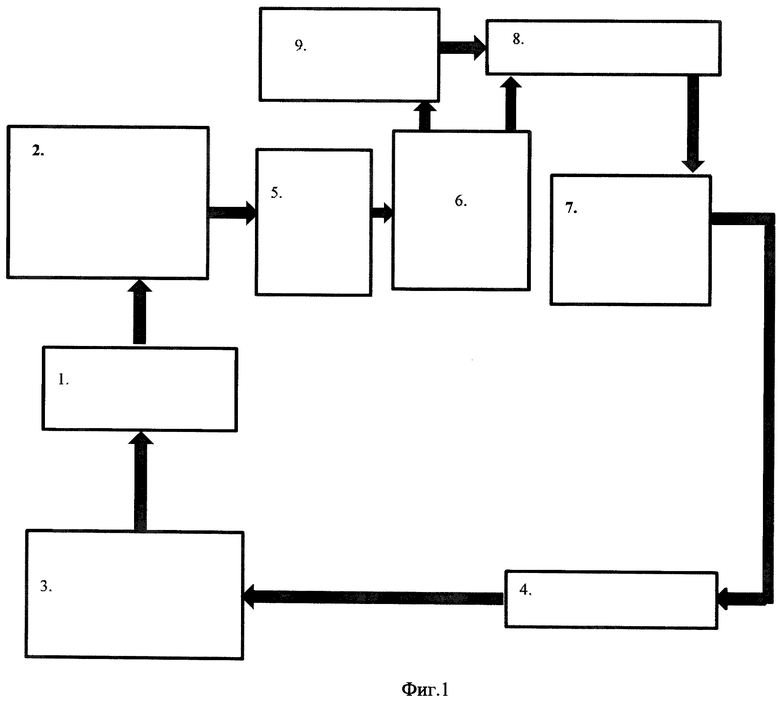
1. Способ определения парциальных частот управляемой поверхности летательного аппарата, при котором закрепляют в пространстве летательный аппарат или его отсек с управляемой поверхностью и ее приводами, прикрепляют к управляемой поверхности вибродатчики и силовозбудители, проводят модальные испытания по методу фазового резонанса, в процессе которых изменяют силы и частоту вынужденных колебаний управляемой поверхности, отличающийся тем, что изменения сил и частоты вынужденных колебаний начинают с собственной частоты искомого тона, определенной при модальных испытаниях, наблюдают за положением узловой линии, за условием выполнения фазового резонанса, а также за показаниями датчиков с определением действительной части и модуля угловой амплитуды неопределяемого тона, и определяют парциальную частоту определяемого тона вращения или изгиба, исходя из одновременного соблюдения, как минимум, следующих условий: положение узловой линии колеблющейся поверхности соответствует определяемому парциальному тону, выполняется условие фазового резонанса, выполняется условие равенства нулю действительной части угловой амплитуды неопределяемого тона, выполняется условие равенства нулю модуля угловой амплитуды неопределяемого тона.
2. Способ по п. 1, отличающийся тем, что определение положения узловой линии колеблющейся поверхности, соответствующей определяемому парциальному тону, выполнение условия фазового резонанса, выполнение условия равенства нулю действительной части угловой амплитуды неопределяемого тона, выполнение условия равенства нулю модуля угловой амплитуды неопределяемого тона производится с заданными погрешностями.
3. Способ по п. 1, отличающийся тем, что наблюдают за показаниями датчиков с определением действительной части угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, что является первым сигналом определяемого тона, и за показаниями датчиков с определением модуля угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, что является вторым сигналом определяемого тона, и выбирают варианты изменения сил и частоты вынужденных колебаний.
4. Способ определения парциальных частот управляемых поверхностей по п. 1, отличающийся тем, что изменения сил осуществляют пошагово или непрерывно в ручном или автоматическом режиме.
5. Способ определения парциальных частот управляемых поверхностей по п. 1, отличающийся тем, что для учета влияния нелинейностей, а именно, трения и люфтов элементов конструкции управления управляемой поверхностью, изменяют силы для обеспечения поддержания постоянства амплитуды искомого тона форм колебаний.
6. Устройство определения парциальных частот управляемой поверхности летательного аппарата, содержащее соединенные последовательно прикрепляемые к управляемой поверхности вибродатчики, усилители сигналов от вибродатчиков, коммутаторы, система сбора данных, генератор гармонических сигналов с блоками подбора сил, усилители мощности, прикрепляемые к управляемой поверхности силовозбудители, отличающееся тем, что дополнительно содержит блок индикации парциальных тонов, входы которого соединены с выходами коммутаторов, а выход - с системой сбора данных.
7. Устройство по п. 6, отличающееся тем, что блок индикации парциальных тонов содержит устройство вычисления первого сигнала индикации парциального тона, равного действительной части угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона, а также устройство вычисления второго сигнала индикации парциального тона, равного модулю угловой амплитуды неопределяемого тона, деленной на модуль угловой амплитуды определяемого тона.
| Модальные испытания летательных аппаратов и воспроизведение силовых воздействий Карклэ П.Г., Смыслов В.И., Москва : Техносфера, 2017, стр.65-67 | |||
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ | 2003 |
|
RU2237884C1 |
| Способ вибрационных испытаний сложной конструкции и устройство для его осуществления | 1976 |
|
SU739976A1 |

