Предлагаемый способ относится к способам проведения модальных испытаний многосегментных нежестких раскрываемых конструкций космического назначения, рассчитанных на работу в невесомости (например, крупногабаритных рефлекторов и панелей солнечных батарей).
Необходимость проведения таких испытаний обусловлена тем, что упругие колебания конструкции существенно влияют на процессы ориентации и стабилизации космического аппарата (КА) в целом или отдельных его частей. Для правильного учета степени влияния этого фактора необходимо знать собственные формы упругих колебаний, их частоты и коэффициенты демпфирования.
Общий подход к проведению модальных испытаний изложен, например, в книге: Хейлен В., Ламменс С., Сас П. Модальный анализ: теория и испытания / Пер. с англ. Межина B.C. и Невзорского Н.А. М.: ООО «Новатест», - 2010.
В качестве прототипа выбран способ, изложенный в публикации:
Зимин В.П., Колосков И.М, Мешковский В.Е., Таирова Л.П., Чурилин С.А. Экспериментальные исследования элементов космических конструкций, МГТУ им. Баумана, Инженерный журнал: наука и инновации, - 2013. - №3. Ссылка: www.engjournal.ru/articles/617/617.pdf. В соответствии с указанным известным способом, конструкцию обезвешивают с помощью пассивных вантовых устройств, установленных в выбранных точках, возбуждают стационарные колебания с помощью электродинамических силовозбудителей, присоединенных к конструкции в других точках и с помощью датчиков проводят измерения кинематических параметров отклика элементов конструкции на некотором множестве выбранных точек.
Недостатком прототипа является сложность оборудования статической вывески, сложность подготовительных процедур и существенное ограничение механических степеней свободы перемещения, обусловленное характером приложения статических сил обезвешивания, динамических сил возбуждения и размещением измерительных датчиков в разных точках испытываемой конструкции. Кроме того, способ не обеспечивает нормированное парирование дрейфа свободных конструкций и измерение кинематических параметров колебаний в точках приложения сил.
Известные способы проведения таких испытаний предполагают раздельную реализацию функции обезвешивания, функции возбуждения колебаний и функции измерения воздействующих сил и кинематических откликов. Тем самым, существенно увеличивается количество внешних механических связей, влияющих на корректность имитации состояния невесомости. Как правило, для обезвешивания, используют пассивные способы обезвешивания - на аэростатических платформах снизу или на вантовых подвесках сверху. Однако пассивные подвески не обеспечивают степени свободы вертикальных перемещений. Помимо этого, вантовые подвески при больших размахах колебаний конструкции не обеспечивают строгую вертикальность сил обезвешивания. Тем самым возникает необходимость сооружения специальных высоких стапелей, с целью использования вантов подвески, длина которых будет достаточна для увода частоты горизонтальных маятниковых колебаний за пределы частотного диапазона испытаний. Кроме того, возникает необходимость предварительной калибровки и точной настройки на заданную весовую нагрузку каждого устройства обезвешивания. Изоляция мод колебаний возможна только при многоточечном возбуждении конструкции, что предопределяет сложную подготовительную процедуру, включающую присоединение к отдельным точкам конструкции комплекта измерительных датчиков и специальных силовозбудителей, которые создают дополнительные ограничения степеней свободы колебаний. Для устранения этих недостатков предлагается способ, в соответствии с которым в процессе испытаний в каждой точке обезвешивания обеспечивается приложение необходимого статического усилия компенсации весовой нагрузки и заданное переменное трехкоординатное силовое воздействие, а также производится регистрация перемещений указанной точки.
Задачей изобретения является разработка способа проведения модальных испытаний многосегментных нежестких конструкций, упрощающего статическую вывеску, обеспечивающего точную компенсацию весовых нагрузок при больших перемещениях точек обезвешивания, минимизацию внешних механических связей, точное нормирование динамических сил возбуждения, параллельную регистрацию колебательных перемещений в каждой точке обезвешивания и, при необходимости, возможность нормированного парирования пространственного дрейфа свободных конструкций.
Задача решается разработкой способа проведения модальных испытаний многосегментных нежестких конструкций, при котором конструкцию обезвешивают и минимизируют ограничение степеней свободы перемещений путем приложения постоянных сил обезвешивания и переменных сил возбуждения колебаний в одних и тех же точках, причем одновременно в тех же точках проводят измерения перемещений при помощи стенда, состоящего из однотипных передвижных напольных устройств, каждое из которых в процессе перемещения сегмента отслеживает координаты своей точки приложения силы и обеспечивает точное нормирование силового воздействия по трем ортогональным направлениям независимо от координат точки приложения силы, меняющихся в процессе колебаний. Для обеспечения точности нормирования силы при подготовке стенда к работе калибруют каждое напольное устройство процедурой, при которой определяют параметры зависимости формируемой силы от взаимного положения якорей и статоров электродинамических возбудителей при заданных токах в катушках, сохраняют эти данные в памяти напольных устройств и используют для точного формировании сил в процессе испытаний. Для обеспечения точности обезвешивания перед раскрытием и размещением конструкции на стенде в испытательное положение каждое напольное устройство стенда переводят в режим динамической фиксации заданных координат, а после соединения конструкции с напольными устройствами стенда и отсоединения элементов системы раскрытия измеряют значения компонентов сил, необходимые для фиксации координат, напольными устройствами, размещают полученные данные в памяти устройств, которые при дальнейшей работе в режиме возбуждения колебаний интерпретируют указанные силы как статические нагрузки, подлежащие компенсации, в частности, по вертикали для каждого напольного устройства, как компенсируемый вес сегмента и вес присоединенных к нему вертикально подвижных частей самого устройства. В процессе испытаний все напольные устройства стенда синхронизиронизируют непрерывной передачей кодированных отсчетов времени, формируемых по выделенной цифровой линии общим устройством синхронизации, чем обеспечивают точную привязку по времени измеряемых перемещений и синхронное изменение задаваемых силовых воздействий. Для управления возбуждением с помощью системы управления с аналоговыми входами-выходами в каждом напольном устройстве стенда устанавливают блок аналогоцифрового и цифроаналогового преобразования с аналоговыми входами-выходами, обеспечивающий прием вольтовых сигналов управления силовозбудителями и передачу в систему управления вольтовых сигналов пропорциональных измеряемым перемещениям. Помимо этого, при испытаниях конструкций, свободных от внешних механических связей для устранения пространственного дрейфа у всех или выбранных сегментов в точках обезвешивания при помощи силовозбудителей имитируют идеальные пружины с заданным малым коэффициентом жесткости, для чего каждое выбранное напольное устройство к сумме сил, формируемой соответствующим силовозбудителем, добавляет силу, пропорциональную текущей абсолютной координате точки обезвешивания относительно начального статического положения или назначенного нуля, причем коэффициент пропорциональности задается оператором.
Сущность изобретения заключается в следующем.
Модальные испытания проводятся с целью определения модальных параметров конструкции (формы собственных мод колебаний, их частоты, демпфирования, модальные массы). При модальных испытаниях нежестких раскрываемых конструкций космического назначения возникает также необходимость имитации состояния невесомости для каждого звена конструкции, поскольку напряженное состояние, создаваемое весовыми нагрузками, может существенно повлиять на точность определения модальных параметров. Помимо этого, для точного определения параметров отдельной моды необходимо ее изолировать от других мод, что предполагает многоточечное возбуждение обезвешенной конструкции, то есть воздействие на нее согласованной системы сил, частота, направления и амплитуды которых подбираются в процессе испытаний. Собственно модальные параметры определяются путем анализа матрицы частотных характеристик, для вычисления которой по результатам испытаний необходимо регистрировать зависимости от времени приложенных сил и кинематических откликов (перемещений, скоростей или ускорения) возбужденной конструкции на некотором множестве точек.
Существенно, что при испытаниях указанных конструкций амплитуды перемещений для разных мод колебаний могут быть значительными (от долей до десятков сантиметров), характерные частоты в диапазоне 0,1-10 Гц, а характерные силы, возбуждающие колебания в диапазоне 0,01-1 Н, при том что компенсируемый вес сегментов варьируется в пределах до нескольких десятков килограммов.
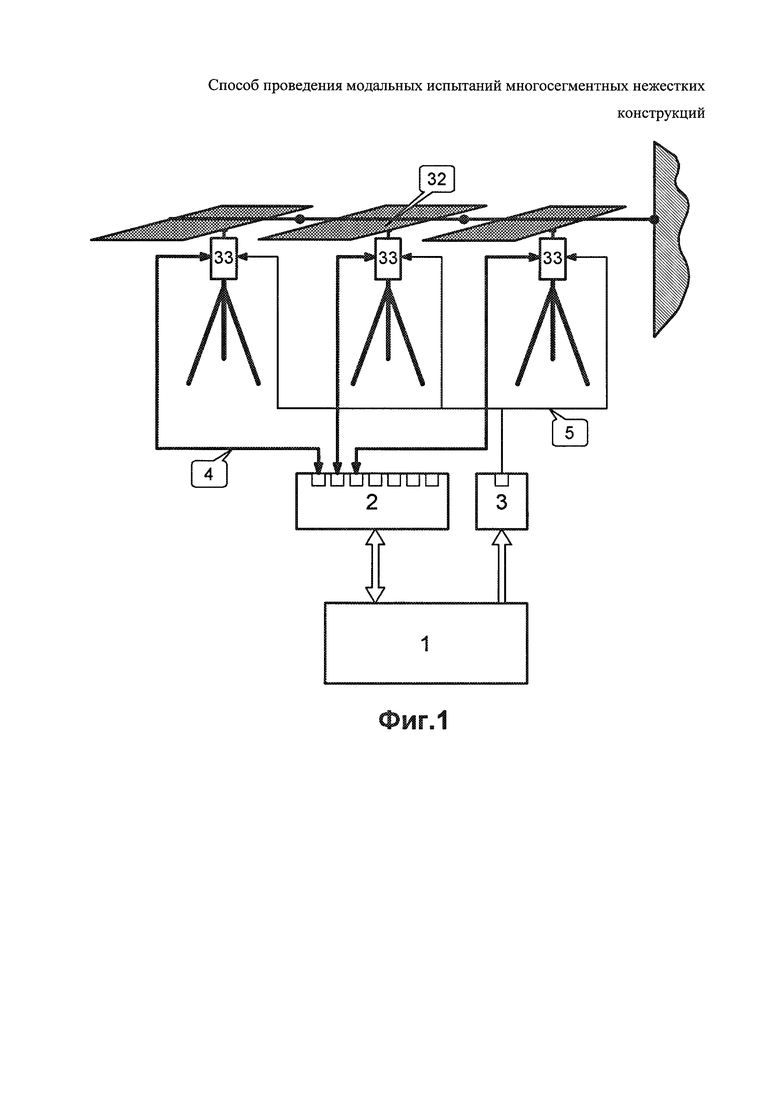
Способ реализуется на базе универсального конфигурируемого стенда, состоящего из однотипных передвижных свободно размещаемых напольных устройств, работающих под управлением центрального компьютера. При испытаниях конкретной конструкции, в зависимости от числа и местоположения выбранных точек обезвешивания, стенд конфигурируют включением соответствующего набора таких напольных устройств.
Структурная схема стенда, реализующего способ, показана на Фиг.1.
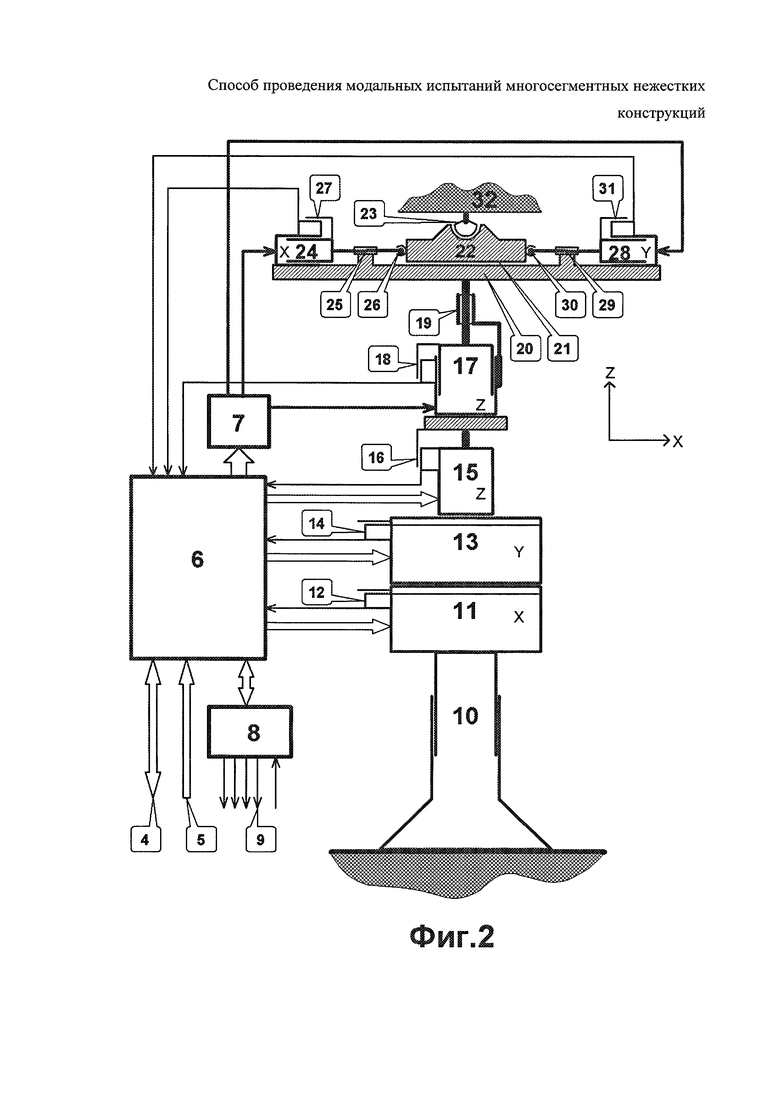
На Фиг.2 показана структурная схема отдельного напольного устройства с его связями (ориентация силовозбудителя 28 направления Y показана условно). Оборудование подачи воздуха высокого давления и проточные каналы аэростатических опор не показаны.
Стенд включает центральный компьютер 1; маршрутизатор 2, соединенный с компьютером 1 цифровой линией (например, Ethernet); модуль синхронизации 3 кодированных отсчетов времени; комплект однотипных подвижных напольных устройств 33, каждое из которых соединено с маршрутизатором 2 отдельной цифровой линией 4 (например, Ethernet), а также с модулем синхронизации 3 через параллельную цифровую линию 5. Оборудование каждого напольного устройства 33 содержит цифровой контроллер 6; высокоточный преобразователь «код-ток» 7, соединенный цифровой линией с контроллером 2; устройство 8 цифроаналогового и аналогоцифрового преобразования с аналоговыми входами-выходами 9; передвижную регулируемую напольную опору 10, в которой предусмотрены фиксаторы вертикального и горизонтального положения, регулировка положения несущей поверхности по высоте и возможность ее горизонтальной юстировки; кинематическую платформу 11, жестко закрепленную на несущей горизонтальной поверхности напольной опоры 10, перемещением подвижной части которой в горизонтальном направлении X управляет контроллер 6; датчик 12, передающий в контроллер 6 данные о перемещении подвижной части платформы 11; кинематическую платформу 13, жестко закрепленную на несущей горизонтальной поверхности подвижной части кинематической платформы 11, перемещением подвижной части которой в горизонтальном направлении Y управляет контроллер 6; датчик 14, передающий в контроллер 6 данные о перемещении подвижной части платформы 13; кинематическую платформу 15, жестко закрепленную на несущей горизонтальной поверхности подвижной части кинематической платформы 13, перемещением подвижной части которой в вертикальном направлении Z управляет контроллер 6; датчик 16, передающий в контроллер 6 данные о перемещении подвижной части платформы 15; вертикально расположенный линейный электродинамический силовозбудитель 17, статор которого жестко закреплен на несущей горизонтальной поверхности подвижной части кинематической платформы 15, управляемый с первого выхода преобразователя «код-ток» 7; датчик положения 18 якоря силовозбудителя 17 относительно его статора, передающий данные в контроллер 6; линейный подшипник 19, жестко связанный со статором электродинамического силовозбудителя 17 и обеспечивающий его соосность с якорем; горизонтальную опорную площадку 20, ортогонально и жестко связанную со штоком якоря силовозбудителя 17; подвижный опорный элемент 22, образующий вместе с частью горизонтальной опорной площадки 20 плоскую аэростатическую опору 21; сферическую аэростатическую опору 23, передающую усилие с подвижного опорного элемента 22 на опорную точку 32 испытываемого объекта; горизонтально расположенный линейный электродинамический силовозбудитель 24 направления X, управляемый с второго выхода преобразователя «код-ток» 7, статор которого жестко закреплен на горизонтальной опорной площадке 20; линейный подшипник 25, обеспечивающий соосность статора и якоря силовозбудителя 24; линейный подшипник 26, одна часть которого закреплена на боковой грани подвижного опорного элемента 22, а другая часть образует со штоком якоря силовозбудителя 24 жесткое ортогональное соединение; датчик положения 27 якоря силовозбудителя 24 относительно его статора, передающий данные в контроллер 6; горизонтально расположенный линейный электродинамический силовозбудитель 28 направления Y, управляемый с третьего выхода преобразователя «код-ток» 7, статор которого жестко закреплен на горизонтальной опорной площадке 20 ортогонально направлению силовозбудителя 24; линейный подшипник 29, обеспечивающий соосность статора и якоря силовозбудителя 28; линейный подшипник 30, одна часть которого закреплена на боковой грани подвижного опорного элемента 22, а другая часть образует с штоком якоря силовозбудителя 28 жесткое ортогональное соединение; датчик положения 31 якоря силовозбудителя 28 относительно его статора, передающий данные в контроллер 6.
Стенд работает следующим образом. В процессе испытаний сегменты конструкции (или их элементы) 31 обезвешиваются и возбуждаются напольными устройствами 33. Каждое такое напольное устройство 33 управляется и обменивается данными с центральным компьютером 1 через маршрутизатор 2 по отдельной двунаправленной цифровой линии 4. По этой линии в напольное устройство 33 передаются команды и данные для формирования векторов сил. Из напольного устройства 33 в центральный компьютер 1 передаются массивы синхронно измеренных значений векторов сил и перемещений, сопровождаемых метками времени. Общая синхронизация работы всех задействованных напольных устройств 33, в части регистрации измеряемых перемещений и генерации силовых воздействий, обеспечивается синхронной непрерывной передачей формируемых модулем синхронизации 3 кодированных отсчетов времени по выделенной цифровой линии 5.
Оборудование каждого напольного устройства 33 закреплено на несущей поверхности передвижной опоры 10, в которой предусмотрены фиксаторы вертикального и горизонтального положения, регулировка положения несущей поверхности по высоте и возможность ее горизонтальной юстировки.
Напольное устройство 33 работает следующим образом. В процессе модальных испытаний для возбуждения колебаний контроллер 6, управляемый по магистрали 4 и синхронизируемый по линии 5, используя загруженные в его память данные через высокоточный преобразователь «код - ток» 7, имеющий три независимых цифровых входа и три аналоговых выхода, формирует в катушках электродинамических силовозбудителей 17, 24, 28 токи с заданными амплитудами и с заданными (например, синусоидальными) зависимостями от времени. Указанные зависимости предварительно загружаются в память напольного устройства 33 из центрального компьютера 1. Горизонтальные силовозбудители 24, 28 каждый по своей координате формируют компоненту силы, воздействующую на объект через подвижный опорный элемент 22 и сферическую аэростатическую опору 23. Вертикальный силовозбудитель 17, формирует компоненту силы, воздействующую на объект через горизонтальную опорную площадку 20, плоскую аэростатическую опору 21; подвижный опорный элемент 22 и сферическую аэростатическую опору 23, обеспечивающую также три вращательных степени свободы испытуемого объекта в опорной точке 32.
Компенсация заданной весовой нагрузки реализуется тем, что контроллер 6 к переменному току силовозбудителя вертикального направления 17, возбуждающему колебания, добавляет постоянный ток, формирующий силу, компенсирующую заданную весовую нагрузку, включая вес якоря силовозбудителя 17 и всех узлов, размещенных на горизонтальной опорной площадке 20. Тем самым, полная сила, воздействующая на опорную точку объекта 32, складывается из трех ортогональных переменных компонентов и одного постоянного, направленного вертикально вверх.
Линейный подшипник 19 (например, аэростатический) обеспечивает вертикальную степень свободы перемещения якоря вертикального силовозбудителя 17 относительно его статора и центровку его катушки в магнитном зазоре. Линейные подшипники 25, 29 обеспечивают горизонтальные степени свободы якорей, соответственно, силовозбудителей 24, 28 относительно статоров в направлении их осей, обеспечивая также центровку катушек в магнитных зазорах. Подвижный опорный элемент 22 имеет плоское основание, размещается на аэростатической опоре 21, его степени свободы перемещения в горизонтальных направлениях, ортогональных осям якорей соответствующих силовозбудителей обеспечиваются линейными подшипниками 26, 30. Неподвижная часть подшипников 26, 30 жестко закреплена на соответствующих боковых гранях опорного элемента 22, подвижные их части жестко связаны с подвижными частями подшипников 25, 29, соответственно, и через них образуют со штоками якорей силовозбудителей 24, 28 ортогональное соединение (например, Т-образное, при этом неподвижная часть подшипников 26, 30 имеет горизонтальную прорезь). Тем самым, подшипники 25, 29 и 26, 30 совместно обеспечивают передачу толкающего и тянущего усилия со стороны якорей силовозбудителей 24, 28 по их осям на опорный элемент 22, обеспечивая при этом свободу его горизонтального перемещения по плоскости аэростатической опоры 21 в поперечных к их осям направлениях и препятствуя вращению опорного элемента 22.
Кинематические платформы 11, 13, 15 образуют структуру типа «сэндвич», совместно обеспечивая управляемое контроллером перемещение размещенных на ней узлов в любом направлении. Каждая платформа состоит из подвижной площадки, имеющей степень свободы перемещения относительно ее основания, обеспечиваемую актуатором с цифровым управлением (например, на базе шагового двигателя) только в одном из трех ортогональных направлений, при этом каждая платформа перемещает всю смонтированную на ее подвижной площадке конструкцию. Существенно то, что управление движением платформ ведется по чисто кинематическому параметру -перемещению, при этом контроллер 6 формирует усилия, создаваемые силовозбудителями, через преобразователь «код-ток» 7 и синхронно по цифровым каналам управляет движением каждой кинематической платформы таким образом, что в любой момент времени минимизируется отклонение от среднего положения якорей всех силовозбудителей относительно их статоров. Для реализации алгоритма такого управления контроллер использует показания датчиков положения 18, 27, 31. Тем самым, при оптимальном управлении контроллером движением кинематических платформ 11, 13, 15, якоря всех силовозбудителей по координатам своих осей квазинеподвижны относительно опорной точки 32 присоединения испытываемой конструкции к напольному устройству 33 на сферической аэростатической опоре 23 с точностью до его смещения при поворотах на аэростатическом шарнире, что дает сразу три положительных эффекта. Во-первых, поскольку якоря и статоры силовозбудителей 24, 28 в процессе колебания сегмента остаются квазинеподвижными друг относительно друга, а последние жестко закреплены на верхней опорной поверхности 20, точка обезвешивания всегда находится вблизи продольной оси силовозбудителя 17, тем самым минимизируются требования к линейному подшипнику 19 в части парирования боковых моментных нагрузок, влияющих на силу трения при вертикальных перемещениях сегмента. Во-вторых, резко снижаются требования к величинам ходов штоков всех силовозбудителей, не влияя на возможность проводить испытания при значительных амплитудах колебаний по всем координатам. В-третьих, для всех силовозбудителей минимизируются погрешности задания компонентов силы, связанные с их зависимостями при заданных токах от взаимных положений якорей и статоров, чем достигается квазилинейная зависимость силы от задаваемых токов при больших перемещениях конструкции в процессе колебаний. Тем самым, управляя этими токами можно точно нормировать каждую координатную компоненту силы, а поскольку текущее значение токов всегда известно, это дает возможность в состоянии покоя измерять внешние статические усилия (например, вес). Помимо этого отпадает необходимость в установке датчиков силы.
Дополнительно точность формирования заданного вектора силы заданным током повышается тем, что в штатные процедуры подготовки стенда к работе включается периодическая процедура калибровки каждого напольного устройства, при которой табулируется зависимость силы от взаимного положения якоря и статора при заданных токах в катушках всех силовозбудителей. Полученная при калибровке таблица записываются в постоянное запоминающее устройство контроллера и используются в процессе штатной работы таким образом, что при формировании тока в каждом силовозбудителе вводится коррекция на положение якоря относительно статора.
Датчики перемещения 12, 14, 16 обеспечивают измерение и передачу в контроллер 6 текущих координат положения подвижных площадок кинематических платформ 11, 13, 15 соответственно. Попарно суммируя показания датчиков 12 и 27, 14 и 31, 16 и 18, контроллер определяет текущие абсолютные координаты подвижного опорного элемента 22, то есть, собственно, координаты точки силового воздействия на обезвешенный сегмент конструкции. Таким образом, в процессе испытаний в любой момент времени контроллеру известен вектор абсолютной координаты указанной точки и действующий на нее вектор силы.
Каждое напольное устройство 33 в составе стенда может работать в 4-х режимах, переход в которые осуществляется по командам оператора.
Режим 1 - перемещение всех узлов напольного устройства 33 в среднее положение по всем измеряемым координатам.
Режим 2 - удержание координат. В этом режиме напольное устройство 33, используя показания датчиков положения, формирует необходимые силы для фиксации заданных оператором, либо текущих абсолютных координат подвижного опорного элемента 2, независимо от приложенного к нему внешнего усилия. По команде оператора напольное устройство 33 может измерить, запомнить и передать в центральный компьютер текущие статические нагрузки по всем координатам (при этом, по вертикальной координате Z, включая и вес собственных частей за статором силовозбудителя 5).
Режим 3 - обезвешивание. В этом режиме напольное устройство 33, независимо от перемещения подвижного опорного элемента 22, формирует в вертикальном направлении Z статическую силу, ранее измеренную в Режиме 2, либо заданную оператором.
Режим 4 - обезвешивание и активное силовозбуждение. В этом режиме к статической силе обезвешивания по вертикали добавляется переменная часть по всем трем координатам. Для формирования переменной части силы в каждом напольном устройстве используется содержимое сегмента памяти его контроллера, в который предварительно со стороны центрального компьютера загружается блок данных зависимости модуля силы от времени (например, период синуса). Помимо этого в три ячейки памяти загружаются три коэффициента, сумма квадратов которых равна 1, которые интерпретируются контроллером как ортогональные проекции орта направления вектора силы. В данном режиме контроллер, в дополнение к статической силе компенсации веса в каждом силовозбудителе, начинает формировать заданную переменную часть силы, используя последовательные значения данных буфера, умноженные на соответствующий коэффициент, при этом данные буфера используется циклически, и могут быть оперативно перезагружены.
Во всех режимах работы каждое напольное устройство стенда может по команде оператора начать запись во внутреннюю память своего контроллера синхронизированных дискретных данных по формируемым возбуждающим силам и перемещениям возбужденного сегмента конструкции, как отклика на эти силы. Любой блок записанных данных с заданного момента времени и заданной длины по команде оператора передается в центральный компьютер. Общая синхронизация позволяет, используя синхронные массивы данных по силам и перемещениям от всех задействованных напольных устройств, получить матрицу передаточной функции, содержащую всю необходимую информацию для вычисления модальных параметров. При необходимости, (например, при малых перемещениях сегментов конструкции на сравнительно высоких частотах), функция кинематического слежения в каждом напольном устройстве может быть отключена полностью, или частично по выбранным координатам. В этом случае, степени свободы перемещения сегмента конструкции обеспечиваются только смещениями якорей силовозбудителей относительно статоров.
Условием точного обезвешивания конструкции является состояние безразличного равновесия по всем координатам. При этом, если конструкция свободна, то есть не имеет внешних связей, ограничивающих степени свободы ее перемещений, практически неизбежен дрейф конструкции по координатам (аналогично тому, как это происходит в состоянии невесомости). Для того, чтобы иметь возможность парировать такой дрейф, в каждом напольном устройстве по каждой координате предусмотрена возможность включения по команде оператора функции «электронная пружина». При включении этой функции в любом режиме работы напольного устройства к силе, уже формируемой соответствующим силовозбудителем, добавляется сила, пропорциональная текущей абсолютной координате точки обезвешивания относительно назначенного нуля. Коэффициент пропорциональности (то есть жесткость «пружины») предварительно задается оператором.
В каждом напольном устройстве 33 стенда имеется блок 8 аналогоцифрового и цифроаналогового преобразования с аналоговыми входами-выходами 9. По команде оператора напольное устройство 33 переходит в состояние, при котором источником сигнала для формирования возбуждающей силы становится входящая аналоговая линия. Вольтовый сигнал по этой линии преобразуется в код и интерпретируется как зависимость модуля возбуждающей силы от времени, при этом на 3-х выходных аналоговых выходах формируется вольтовые сигналы, пропорциональные мгновенным значениям перемещений точки обезвешивания по трем координатам, а на четвертой выходной аналоговой линии формируется вольтовый сигнал, пропорциональный мгновенным значениям модуля силы. Этот режим работы предусмотрен на случай использования в составе стенда систем управления с аналоговыми входами-выходами, при этом все измеряемые данные остаются доступными в цифровом виде центральному компьютеру.
Процедура проведения модальных испытаний по заявленному способу предусматривает следующие этапы.
Этап 1 - подготовительный. На этом этапе испытываемая конструкция раскрывается и вывешивается над плоскостью пола таким образом, чтобы ее геометрия соответствовала геометрии в состоянии невесомости. Напольные устройства 33 включаются и в Режиме 1 переводят все узлы в среднее положение по всем измеряемым координатам. Далее, все напольные устройства 33 переводятся в Режим 2 фиксации координат, подводятся под расчетные точки обезвешивания, позиционируются по горизонтали и вертикали с помощью оборудования передвижной опоры 10, закрепляются к полу, после чего производится механическое соединение точек обезвешивания элементов конструкции 32 с шарнирами сферических аэростатических опор 22.
Этап 2 - обезвешивание и измерение статических нагрузок. На этом этапе оборудование раскрытия отсоединяется от конструкции, его нагрузку воспринимают и компенсируют только напольные устройства стенда. После этого напольные устройства поочередно переводятся в Режим 3, при этом контролируются дрейфы абсолютных координат точек обезвешивания с тем, чтобы запасы кинематических платформ по перемещениям не превышали предполагаемые амплитуды колебаний. При необходимости на выбранных напольных устройствах для выбранных координат задается функция «электронной пружины» с подходящей жесткостью. После завершения переходных процессов, если и когда конструкция находится в покое, всем задействованным напольным устройствам дается команда запомнить текущую вертикальную нагрузку и принять все текущие абсолютные координаты за 0.
Этап 3 - основной. На этом этапе производится управляемое возбуждение колебаний конструкции и измерение их параметров в соответствии с программой испытаний. При этом в Режим 4, в зависимости от целей испытания, может переводиться только часть напольных устройств, остальные выполняют функцию пассивного обезвешивания своих сегментов.
Технические результаты заявленного способа следующие:
- минимизация операций при подготовке стенда к испытаниям;
- отсутствие ограничений по выбору точек обезвешивания на сегментах конструкции;
- отсутствие необходимости применения дополнительных датчиков сил и кинематических параметров;
- автоматизация процедуры весовой балансировки конструкции при размещении на стенде в испытательное положение;
- нормируемая компенсация пространственного дрейфа обезвешенной конструкции;
- минимизация ограничений степеней свободы испытываемой конструкции при имитации состояния невесомости;
- снятие ограничений по амплитуде свободных перемещений точек обезвешивания, обусловленных малыми ходами штоков линейных силовозбудителей.
Экспериментальный образец напольного устройства стенда разработан, изготовлен и подтвердил работоспособность заявленного способа. Анализ известных технических решений в предметной области применимости способа позволяет сделать вывод об отсутствии в них признаков, сходных с его существенными отличительными признаками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| Способ экспериментального определения динамических характеристик гибких протяженных конструкций | 2021 |
|
RU2775360C1 |
| Стенд для испытания изделий на воздействие пространственной поступательной вибрации | 1989 |
|
SU1793295A1 |
| Способ испытаний систем и приборов космического назначения в условиях имитации невесомости | 2023 |
|
RU2823384C1 |
| Способ определения собственных частот и форм колебаний свободной конструкции по результатам испытаний этой конструкции с наложенными связями | 2019 |
|
RU2728329C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| Способ определения парциальных частот управляемой поверхности летательного аппарата и устройство для его осуществления | 2019 |
|
RU2715369C1 |
| Стенд для вибрационных испытаний транспортных средств | 1989 |
|
SU1709191A1 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ДВИЖЕНИЯ | 1998 |
|
RU2244961C2 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
Изобретение относится к способам проведения модальных испытаний многосегментных нежестких раскрываемых конструкций космического назначения, рассчитанных на работу в невесомости (например, крупногабаритных рефлекторов и панелей солнечных батарей). Сущность: возбуждают в конструкции стационарные колебания и с помощью датчиков проводят измерения кинематических параметров отклика элементов конструкции на некотором множестве выбранных точек. При обезвешивании конструкции минимизируют ограничение степеней свободы перемещений путем приложения постоянных сил обезвешивания и переменных сил возбуждения колебаний в одних и тех же точках. Одновременно, в вышеупомянутых точках, проводят измерения перемещений при помощи стенда, состоящего из однотипных передвижных напольных устройств, с помощью которых в процессе перемещения сегмента отслеживают координаты своей точки приложения силы и обеспечивают точное нормирование силового воздействия по трем ортогональным направлениям независимо от положения точки приложения силы. При подготовке стенда к работе калибруют каждое напольное устройство процедурой, при которой определяют параметры зависимости формируемой силы от взаимного положения якорей и статоров электродинамических возбудителей при заданных токах в катушках, сохраняют эти данные в памяти напольных устройств и используют для точного формировании сил в процессе испытаний. Технический результат: минимизация операций при подготовке стенда к испытаниям, отсутствие ограничений по выбору точек обезвешивания на сегментах конструкции, отсутствие необходимости применения дополнительных датчиков сил и кинематических параметров, автоматизация процедуры весовой балансировки конструкции при размещении на стенде в испытательное положение, нормируемая компенсация пространственного дрейфа обезвешенной конструкции, минимизация ограничений степеней свободы испытываемой конструкции при имитации состояния невесомости, снятие ограничений по амплитуде свободных перемещений точек обезвешивания, обусловленных малыми ходами штоков линейных силовозбудителей. 4 з.п. ф-лы, 2 ил.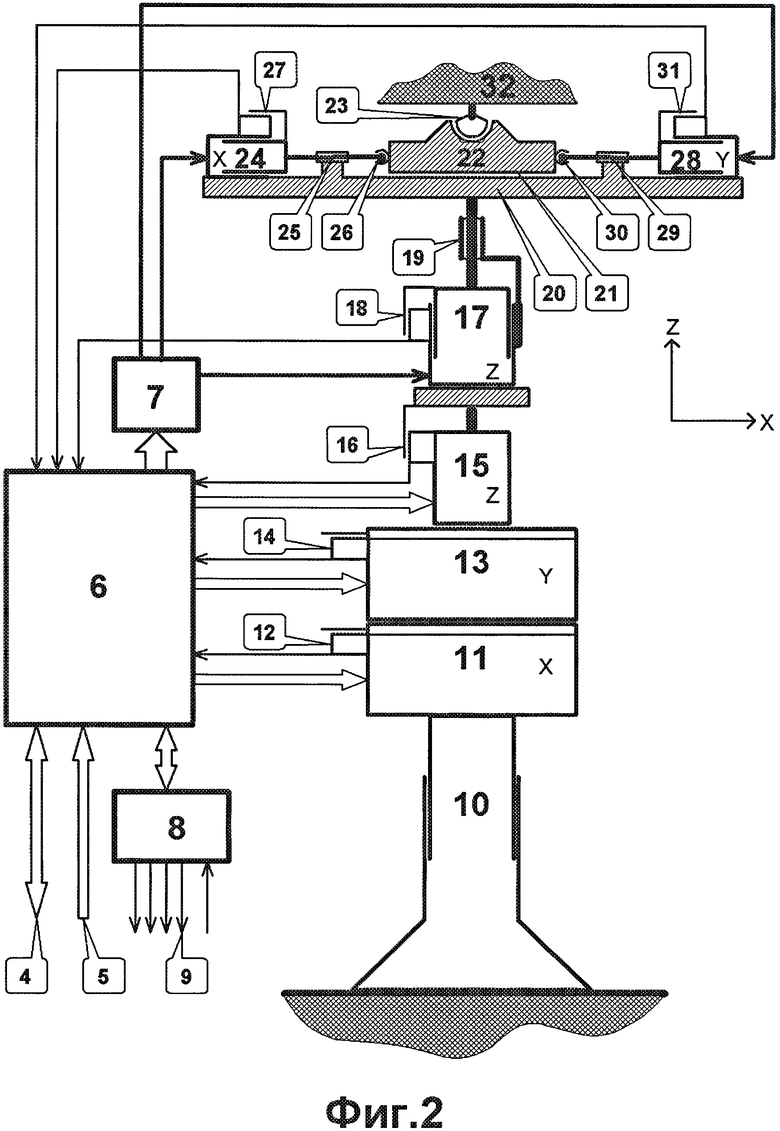
1. Способ проведения модальных испытаний многосегментных нежестких конструкций, при котором конструкцию обезвешивают с помощью электродинамических силовозбудителей, возбуждают в ней стационарные колебания и с помощью датчиков проводят измерения кинематических параметров отклика элементов конструкции на некотором множестве выбранных точек, отличающийся тем, что при обезвешивании конструкции минимизируют ограничение степеней свободы перемещений путем приложения постоянных сил обезвешивания и переменных сил возбуждения колебаний в одних и тех же точках, причем одновременно, в тех же точках, проводят измерения перемещений при помощи стенда, состоящего из однотипных передвижных напольных устройств, с помощью которых в процессе перемещения сегмента отслеживают координаты своей точки приложения силы и обеспечивают точное нормирование силового воздействия по трем ортогональным направлениям независимо от положения точки приложения силы, для чего при подготовке стенда к работе калибруют каждое напольное устройство процедурой, при которой определяют параметры зависимости формируемой силы от взаимного положения якорей и статоров электродинамических возбудителей при заданных токах в катушках, сохраняют эти данные в памяти напольных устройств и используют для точного формировании сил в процессе испытаний.
2. Способ по п. 1, отличающийся тем, что перед раскрытием и размещением конструкции на стенде в испытательное положение каждое напольное устройство стенда переводят в режим динамической фиксации заданных координат, а после соединения конструкции с напольными устройствами стенда и отсоединения элементов системы раскрытия измеряют значения компонентов сил, необходимые для фиксации координат, напольными устройствами, размещают в их памяти и при дальнейшей работе в режиме возбуждения колебаний интерпретируют как статические нагрузки, подлежащие компенсации, в частности, по вертикали для каждого напольного устройства, как компенсируемый вес сегмента и вес присоединенных к нему вертикально подвижных частей напольного устройства.
3. Способ по п. 1, отличающийся тем, что в процессе испытаний все напольные устройства стенда синхронизируют непрерывной передачей кодированных отсчетов времени, формируемых по выделенной цифровой линии общим устройством синхронизации, чем обеспечивают точную привязку по времени измеряемых перемещений и синхронное изменение задаваемых силовых воздействий.
4. Способ по п. 1, отличающийся тем, что для управления возбуждением с помощью системы управления с аналоговыми входами-выходами в каждом напольном устройстве стенда устанавливают блок аналого-цифрового и цифроаналогового преобразования с аналоговыми входами-выходами, обеспечивающий прием вольтовых сигналов управления силовозбудителями и передачу в систему управления вольтовых сигналов, пропорциональных измеряемым перемещениям.
5. Способ по п. 2, или 3, или 4, отличающийся тем, что при испытаниях конструкций, свободных от внешних механических связей, для устранения пространственного дрейфа у всех или выбранных сегментов в точках обезвешивания силовозбудителями имитируют идеальные пружины с заданным малым коэффициентом жесткости, для чего с помощью каждого выбранного напольного устройства к сумме сил, формируемой соответствующим силовозбудителем, добавляют силу, пропорциональную текущей абсолютной координате точки обезвешивания относительно начального статического положения или назначенного нуля, причем коэффициент пропорциональности задается оператором.
| СПОСОБ ИСПЫТАНИЙ НА ВЫСОКОИНТЕНСИВНЫЕ УДАРНЫЕ ВОЗДЕЙСТВИЯ ПРИБОРОВ И ОБОРУДОВАНИЯ | 2007 |
|
RU2338169C1 |
| СТЕНД ДЛЯ ВИБРАЦИОННЫХ ИСПЫТАНИЙ ДЛИНОМЕРНЫХ ИЗДЕЛИЙ | 1987 |
|
SU1840349A1 |
| Стенд для испытания конструкций на усталость | 1990 |
|
SU1730563A1 |
| US 0003699807 A1 24.10.1972. | |||

