Изобретение относится к области электротехники и может быть использовано в электроприводах различных механизмов, в том числе, в электроприводах насосов, компрессоров, вентиляторов, бытовой техники.
Известен способ управления вентильно-индукторным электрическим двигателем (Krishnan R. Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design and Applications. The Bradley Department of Electrical and Computer Engineering Fellow, Center for Organizational and Technological Advancement (COTA) Virginia Tech, Blacksburg. - 2001. pp. 375-400), в котором при каждом цикле управления включают очередную фазу вентильно-индукторного электрического двигателя в зависимости от ранее определенного момента времени, задают напряжение на очередной включенной фазе, измеряют ток во включенной фазе, формируют напряжение на включенной фазе в зависимости от заданного напряжения по закону широтно-импульсной модуляции, определяют производную тока во включенной фазе, далее детектируют переход включенной фазы в двигательный режим, затем определяют момент времени для отключения очередной включенной фазы и момент времени для последующего включения следующей фазы, далее отключают очередную включенную фазу в определенный ранее момент времени, причем скважность широтно-импульсной модуляции напряжения задают постоянной в течение включенного состояния фазы, переход включенной фазы в двигательный режим детектируют по смене знака производной тока с положительного на отрицательный, момент времени для отключения очередной включенной фазы определяют таким образом, чтобы он имел упреждение по отношению к переходу ее в генераторный режим, момент времени для включения следующей фазы определяют таким образом, чтобы он имел упреждение по отношению к ее переходу в двигательный режим.
Недостатком данного технического решения являются пониженные энергетические характеристики.
Также известен способ управления вентильно-индукторным электрическим двигателем (Аракелян А.К., Глухенький Т.Г. Определение положения ротора в высокоскоростных бездатчиковых вентильно-индукторных электроприводах // Электричество. 2003. - №4. - С. 27-30), в котором при каждом цикле управления включают очередную фазу вентильно-индукторного электрического двигателя в зависимости от ранее определенного момента времени, задают ток в очередной включенной фазе, измеряют ток во включенной фазе, формируют ток во включенной фазе в зависимости от его заданного и измеренного значений по релейному закону, далее закорачивают включенную фазу в зависимости от определенного ранее момента времени, определяют производную тока в закороченной фазе, далее детектируют переход закороченной фазы в генераторный режим, детектируют согласованное положение зубцов статора и ротора вентильно-индукторного электрического двигателя, далее отключают закороченную фазу, затем определяют момент времени для последующего включения следующей фазы и момент времени для ее закорачивания, причем переход фазы в генераторный режим детектируют по смене знака производной тока с отрицательного на положительный, момент времени для включения следующей фазы определяют таким образом, чтобы он соответствовал рассогласованному положению зубцов статора и ротора для этой фазы, а момент времени для закорачивания фазы определяют таким образом, чтобы он имел упреждение по отношению к переходу ее в генераторный режим.
Недостатком данного технического решения являются пониженные энергетические характеристики.
Наиболее близким по технической сущности к заявляемому изобретению является способ управления вентильно-индукторным электрическим двигателем (Полющенков И.С. Разработка бездатчикового вентильно-индукторного электропривода с искусственной нейронной сетью. Автореферат диссертации на соискание ученой степени кандидата технических наук. ФГБОУ ВПО «НИУ «МЭИ». 2013), в котором при каждом цикле управления измеряют питающее напряжение, корректируют частоту дискретизации токов фаз в зависимости от измеренной величины питающего напряжения, включают очередную фазу в зависимости от определенного ранее момента времени, задают ток в ней, измеряют ток в ней, накапливают дискретную по времени выборку тока этой фазы при его нарастании на измерительном интервале, далее формируют в этой фазе ток в зависимости от его заданного и измеренного значений по релейному закону, далее отключают эту фазу в ранее определенный момент времени, затем включают следующую фазу в зависимости от ранее определенного момента времени, задают ток в ней, измеряют ток в ней, накапливают дискретную по времени выборку тока этой фазы при его нарастании на измерительном интервале, далее формируют в этой фазе ток в зависимости его от заданного и измеренного значений по релейному закону, затем отключают эту фазу в зависимости от определенного ранее момента времени, далее выборки токов очередной фазы и следующей за ней фазы последовательно группируют, затем определяют гармонический состав сгруппированной выборки, затем определяют нормированные рассогласования положений зубцов статора и ротора в моменты времени включения фаз, затем корректируют нормированные рассогласования в зависимости от конструкции вентильно-индукторного электрического двигателя, далее определяют моменты времени для последующих включений очередной фазы и следующей за ней фазы и моменты времени для отключения этих фаз, причем моменты времени для включения фаз определяют таким образом, чтобы они соответствовали рассогласованным положениям зубцов статора и ротора для этих фаз, моменты времени для отключения фаз определяют таким образом, чтобы они имели упреждение по отношению к переходу фаз в генераторный режим, а зависимость между гармоническим составом сгруппированных выборок токов очередной включенной фазы и следующей за ней включенной фазы и нормированным рассогласованием положения зубцов статора и ротора вентильно-индукторного электрического двигателя устанавливают заранее.
Недостатком данного технического решения являются пониженные энергетические характеристики.
Технической задачей предлагаемого изобретения является улучшение энергетических характеристик при управлении вентильно-индукторным электрическим двигателем.
Технический результат заключается в повышении качества управления вентильно-индукторным электрическим двигателем.
Это достигается тем, что в известном способе управления вентильно-индукторным электрическим двигателем, включающем при каждом цикле управления измерение питающего напряжения, коррекцию частоты дискретизации токов фаз в зависимости от измеренной величины питающего напряжения, включение очередной фазы в зависимости от определенного ранее момента времени, измерение тока в ней, задание тока в ней, накопление дискретной по времени выборки тока этой фазы при его нарастании на измерительном интервале, формирование в этой фазе тока в зависимости от его заданного и измеренного значений по релейному закону, отключение этой фазы в зависимости от определенного ранее момента времени, при этом выборку тока очередной включенной фазы последовательно группируют с выборкой тока предшествующей включенной фазы, далее определяют гармонический состав сгруппированной выборки, затем определяют нормированное рассогласование положения зубцов статора и ротора в момент включения фазы, затем корректируют нормированное рассогласование в зависимости от конструкции вентильно-индукторного электрического двигателя, далее определяют момент времени для последующего включения очередной фазы и момент времени для отключения этой фазы, причем момент времени для включения фазы определяют таким образом, чтобы он соответствовали рассогласованному положению зубцов статора и ротора для этой фазы, момент времени для отключения фазы определяют таким образом, чтобы он имел упреждение по отношению к переходу фазы в генераторный режим, а зависимость между гармоническим составом сгруппированных выборок • токов очередной включенной фазы и предшествующей включенной фазы и нормированным рассогласованием положения зубцов статора и ротора вентильно-индукторного электрического двигателя устанавливают заранее.
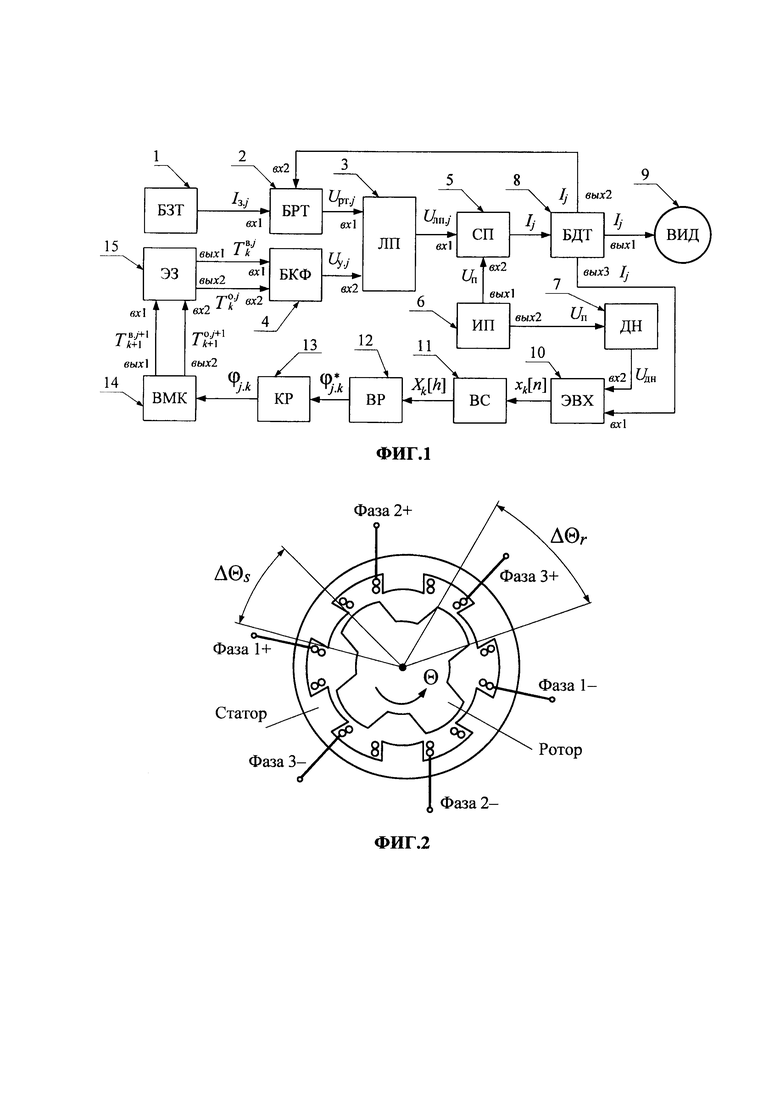
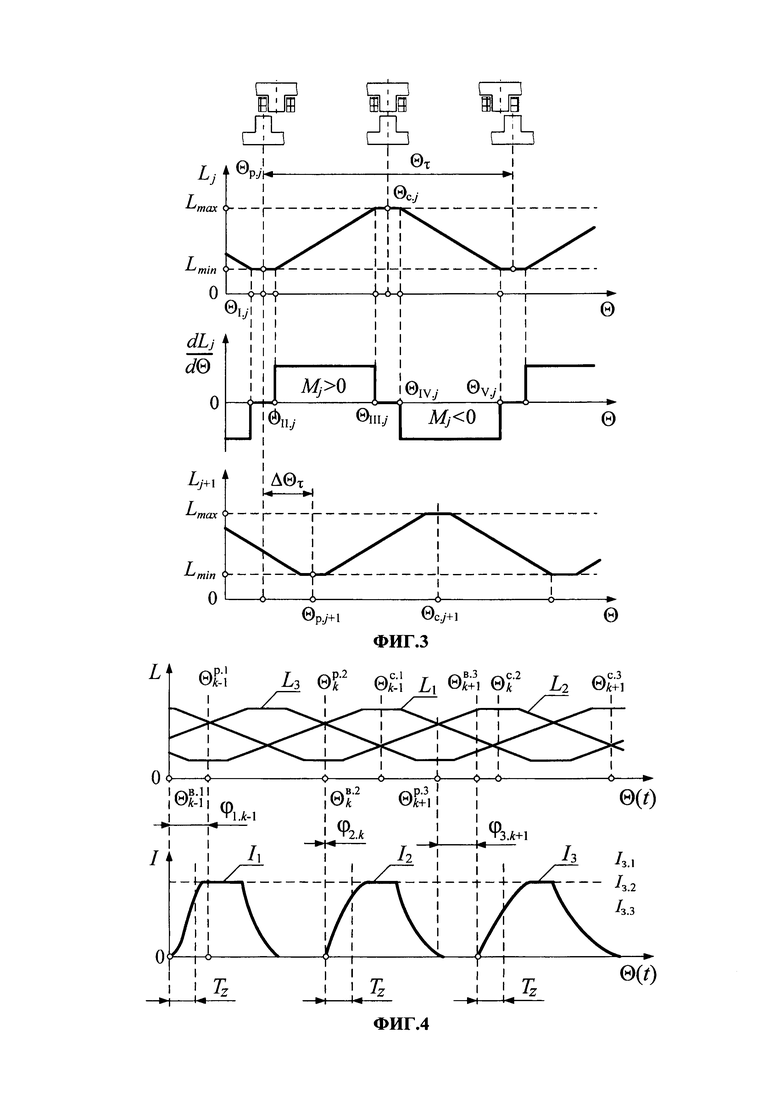
Сущность предлагаемых технических решений поясняется чертежами, где на фиг. 1 изображена функциональная схема устройства, реализующего заявленный способ управления вентильно-индукторным электрическим двигателем; на фиг. 2 показано поперечное сечение вентильно-индукторного электрического двигателя, который имеет число фаз m=3, число зубцов статора zs=6 и число зубцов ротора zr=4; на фиг. 3 показаны зависимости индуктивностей двух соседних фаз вентильно-индукторного электрического двигателя от углового положения ротора; на фиг. 4 показаны формы токов фаз при их нарастании от нуля до заданного значения в зависимости от взаимного положения зубцов статора и ротора в момент включения фаз; на фиг. 5 показано группирование выборки тока очередной включенной фазы с выборкой тока предшествующей включенной фазы; на фиг. 6 показаны временные диаграммы зависимостей индуктивностей фаз от углового положения ротора, временные диаграммы токов фаз и моментов, создаваемых фазами при протекании по ним токов, а также временная диаграмма скорости вращения ротора при способе управления вентильно-индукторным электрическим двигателем с улучшенными энергетическими характеристиками; на фиг. 7 показаны временные диаграммы зависимостей индуктивностей фаз от углового положения ротора, временные диаграммы токов фаз и моментов, создаваемых фазами при протекании по ним токов, а также временная диаграмма скорости вращения ротора при способе управления вентильно-индукторным электрическим двигателем по прототипу.
На графических изображениях приняты следующие обозначения: ΔΘr - ширина зубцовой зоны ротора; t - время; Θ - угловое положение ротора вентильно-индукторного электрического двигателя; ΔΘs - ширина зубцовой зоны статора; ΔΘτ - полюсное деление; Θτ - зубцовое деление; j - порядковый номер фазы вентильно-индукторного электрического двигателя; k - порядковый номер цикла управления; Lmax - индуктивность фаз при согласованном положении зубцов статора и ротора; Lmin - индуктивность фаз при рассогласованном положении зубцов статора и ротора; Lj(Θ) - зависимость индуктивности j-той фазы от углового положения ротора; Θc.j - согласованное положение зубцов статора и ротора для j-той фазы; Θp.j - рассогласованное положение зубцов статора и ротора для j-той фазы; Mj - момент, создаваемый j-той фазой; dLj/dΘ - производная индуктивности j-той фазой по угловому положению ротора; ΘI.j, ΘII.j - границы участка Li(Θ) с минимальной индуктивностью j-той фазы; ΘIII.j - граница участка двигательного участка Lj(Θ) j-той фазы; ΘIV.j - граница участка участка Lj(Θ) с максимальной индуктивностью j-той фазы; ΘV.j - граница участка генераторного участка Lj(Θ) j-той фазы; Tz - измерительный интервал; Ts - период дискретизации токов фаз; Ij - измеренный ток j-той фазы; Iз.j - заданный ток j-той фазы;  - угол включения j-той фазы при k-том цикле управления;
- угол включения j-той фазы при k-том цикле управления;  - угол отключения j-той фазы при k-том цикле управления;
- угол отключения j-той фазы при k-том цикле управления;  - рассогласованное положение зубцов статора и ротора для j-той фазы при k-том цикле управления;
- рассогласованное положение зубцов статора и ротора для j-той фазы при k-том цикле управления;  - согласованное положение зубцов статора и ротора для j-той фазы при k-том цикле управления; ϕj.k - рассогласование (отклонение) угла включения j-той фазы и согласованного положения зубцов статора и ротора при k-том цикле управления;
- согласованное положение зубцов статора и ротора для j-той фазы при k-том цикле управления; ϕj.k - рассогласование (отклонение) угла включения j-той фазы и согласованного положения зубцов статора и ротора при k-том цикле управления;  - нормированное рассогласование угла включения j-той фазы и согласованного положения зубцов статора и ротора при k-том цикле управления; n - порядковый номер элемента в выборке токов фаз; ik[n] - выборка тока j-той фазы при его нарастании на измерительном интервале при k-том цикле управления; xk[n] - массив сгруппированных выборок токов фаз при k-том цикле управления; Xk[h] - массив гармонических составляющих; Uп - напряжение источника питания; Uдн - выходной сигнал датчика напряжения; Uлп.j - выходной сигнал логического переключателя для j-той фазы; Upт.j - выходной сигнал регулятора токов для j-той фазы; Uy.j - выходной сигнал блока коммутации фаз для j-той фазы;
- нормированное рассогласование угла включения j-той фазы и согласованного положения зубцов статора и ротора при k-том цикле управления; n - порядковый номер элемента в выборке токов фаз; ik[n] - выборка тока j-той фазы при его нарастании на измерительном интервале при k-том цикле управления; xk[n] - массив сгруппированных выборок токов фаз при k-том цикле управления; Xk[h] - массив гармонических составляющих; Uп - напряжение источника питания; Uдн - выходной сигнал датчика напряжения; Uлп.j - выходной сигнал логического переключателя для j-той фазы; Upт.j - выходной сигнал регулятора токов для j-той фазы; Uy.j - выходной сигнал блока коммутации фаз для j-той фазы;  - интервал времени вращения ротора от начала (k-1)-го цикла управления до включения j-той фазы при k-том цикле управления;
- интервал времени вращения ротора от начала (k-1)-го цикла управления до включения j-той фазы при k-том цикле управления;  - интервал времени вращения ротора от начала (k-1)-го цикла управления до отключения j-той фазы при k-том цикле управления; ωr - средняя скорость вращения ротора в течение цикла управления; Δωr - изменение средней скорости вращения ротора;
- интервал времени вращения ротора от начала (k-1)-го цикла управления до отключения j-той фазы при k-том цикле управления; ωr - средняя скорость вращения ротора в течение цикла управления; Δωr - изменение средней скорости вращения ротора;  - длительность включенного состояния j-той фазы при k-том цикле управления;
- длительность включенного состояния j-той фазы при k-том цикле управления;  - протяженность включенного состояния j-той фазы при k-том цикле управления;
- протяженность включенного состояния j-той фазы при k-том цикле управления;  - прогнозируемый угол отключения j-той фазы при k-том цикле управления; Тд - момент времени изменения скорости вращения ротора; Θд - угловое положение ротора в момент времени Тд; γj.k - отклонение угла отключения j-той фазы от прогнозируемого угла отключения при k-том цикле управления;
- прогнозируемый угол отключения j-той фазы при k-том цикле управления; Тд - момент времени изменения скорости вращения ротора; Θд - угловое положение ротора в момент времени Тд; γj.k - отклонение угла отключения j-той фазы от прогнозируемого угла отключения при k-том цикле управления;  - момент времени включения j-той фазы при k-том цикле управления;
- момент времени включения j-той фазы при k-том цикле управления;  - момент времени отключения j-той фазы при k-том цикле управления;
- момент времени отключения j-той фазы при k-том цикле управления;  - момент времени включения (j+1)-вой фазы при (k+1)-вом цикле управления;
- момент времени включения (j+1)-вой фазы при (k+1)-вом цикле управления;  - момент времени отключения (j+1)-вой фазы при (k+1)-том цикле управления.
- момент времени отключения (j+1)-вой фазы при (k+1)-том цикле управления.
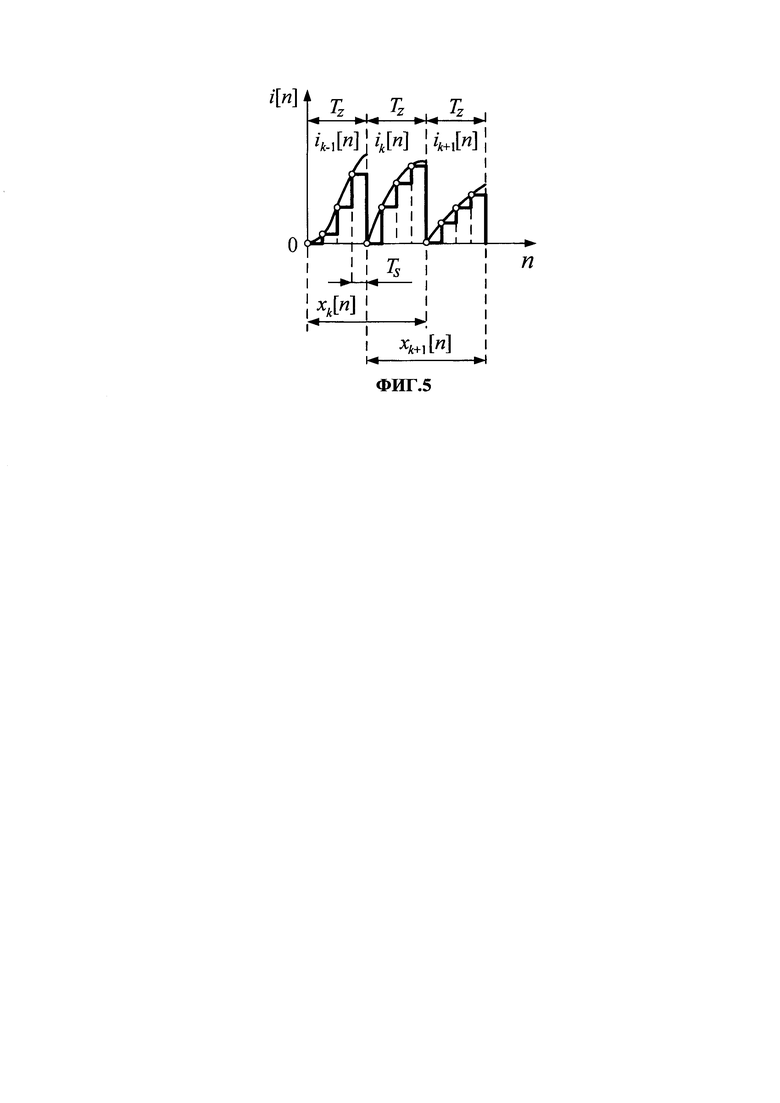
Устройство, реализующее способ управления вентильно-индукторным электрическим двигателем с улучшенными энергетическими характеристиками, содержит блок задатчиков токов (БЗТ) 1, выход которого соединен с первым входом блока регуляторов токов (БРТ) 2, выход блока регуляторов токов 2 соединен с первым входом логического переключателя (ЛП) 3, второй вход которого соединен с выходом блока коммутации фаз (БКФ) 4, выход логического переключателя 3 соединен с первым (управляющим) входом силового преобразователя (СП) 5, второй (силовой) вход силового преобразователя 5 соединен с первым выходом источника питания (ИП) 6, второй выход которого соединен со входом датчика напряжения (ДН) 7, выход силового преобразователя 5 соединен со входом блока датчика токов (БДТ) 8, первый (силовой) выход блока датчика токов 8 соединен с цепью питания вентильно-индукторного электрического двигателя (ВИД) 9, второй (информационный) выход блока датчика токов 8 соединен со вторым входом блока регулятора токов 2, третий (информационный) выход блока датчика токов 8 соединен с первым входом элемента выборки-хранения (ЭВХ) 10, второй вход которого соединен с выходом датчика напряжения 7, выход элемента выборки-хранения 10 соединен со входом вычислителя спектра (ВС) 11, выход которого соединен со входом вычислителя рассогласования (BP) 12, выход вычислителя рассогласования 12 соединен со входом корректора рассогласования (КР) 13, выход которого соединен со входом вычислителя моментов коммутации фаз (ВМК) 14, первый выход вычислителя моментов коммутации фаз 14 соединен с первым входом элемента задержки (ЭЗ) 15, а второй его выход соединен со вторым входом элемента задержки 15, первый выход элемента задержки 15 соединен с первым входом блока коммутации фаз 4, а второй его выход соединен со вторым входом блока коммутации фаз 4.
Блок задатчиков токов 1 может быть реализован на основе цифровой или аналоговой техники. Он может быть самостоятельным элементом или элементом замкнутой системы регулирования. Вентильно-индукторный электрический двигатель 9 должен иметь конструкцию с самоподмагничиванием и может иметь любое число фаз m и любые числа зубцов статора zs и ротора zr, которые связаны следующим соотношением с помощью целого числа β:

Силовой преобразователь 5 должен быть выполнен на основе полупроводниковой техники и может иметь любую конструкцию, допускающую соединение с цепью питания вентильно-индукторного электрического двигателя 9. Источник питания 6 должен иметь выходное напряжение постоянного или выпрямленного тока и должен быть выполнен на основе полупроводниковой техники или аккумуляторной батареи. Датчик напряжения 7 и блок датчиков токов 8 должны быть реализованы на основе измерительных устройств любого типа. Блок релейных регуляторов токов 2 и логический переключатель 3, блок коммутации фаз 4, элемент выборки-хранения 10, вычислитель спектра 11, вычислитель рассогласования 12, корректор рассогласования 13, вычислитель моментов коммутации фаз 14, элемент задержки 15 должны быть реализованы на основе программно-аппаратных средств вычислительной техники.
Поперечное сечение трехфазного m=3 вентильно-индукторного электрического двигателя с соотношением зубцов статора и ротора zs/zr=6/4 показано на фиг. 2. Конструкция вентильно-индукторного электрического двигателя такова, что зависимость индуктивности каждой из фаз Lj(Θ) от углового положения ротора Θ является периодической и имеет характерные участки, как показано на фиг. 3. Для j-той фазы на участке от ΘI.j до ΘII.j вблизи рассогласованного положения зубца ротора и зубца статора Θp.j индуктивность Lj имеет минимальную величину Lmin, а производная Lj(Θ) по угловому положению ротора Θ равна нулю. При протекании тока на этом участке через j-тую фазу вентильно-индукторного электрического двигателя она не создает момент (Mj=0). На участке от ΘII.j до ΘIII.j производная Lj(Θ) по угловому положению ротора Θ положительна. При протекании тока на этом участке через j-тую фазу она создает двигательный момент (Mj>0). На участке от ΘIII.j до ΘIV.j вблизи согласованного положения зубца ротора и зубца статора Θc.j индуктивность Lj имеет максимальную величину Lmax, а производная Lj(Θ) по угловому положению ротора Θ равна нулю. При протекании тока через j-тую фазу она не создает момент (Mj=0). На участке от ΘIV.j до ΘV.j производная Lj(Θ) по угловому положению ротора Θ отрицательа. При протекании тока на этом участке через j-тую фазу она создает генераторный момент (Mj<0) противоположного направления по отношению к двигательному моменту. После углового положению ротора ΘV.j зависимость Lj(Θ) повторяется с периодом, равным зубцовому делению Θτ, а зависимости Lj(Θ) и Lj+1(Θ) для соседних j-той и (j+1)-той фаз смещены на величину полюсного деления ΔΘτ:
Взаимное расположение угловых положений ΘI.j, ΘII.j, ΘIII.j, ΘIV.j, ΘV.j для всех фаз, величины углов Θτ и ΔΘτ, а также индуктивности Lmax и Lmin зависят от конструкции вентильно-индукторного электрического двигателя, а именно, от числа фаз m, ширины зубцовой зоны ротора ΔΘr и ширины зубцовой зоны статора ΔΘs. Момент, создаваемый каждой из фаз, зависит от величины тока, протекающего по ней, а также от производной Lj(Θ) по Θ, а момент вентильно-индукторного электрического двигателя равен сумме этих моментов:

Устройство, показанное на фиг. 1, реализует способ управления вентильно-индукторным электрическим двигателем с улучшенными энергетическими характеристиками следующим образом. При каждом k-том цикле управления с помощью датчика напряжения 7 измеряют напряжение источника питания 6. Сигнал Uдн на выходе датчика напряжения связан с величиной напряжения Uп на его входе следующим соотношением:

где kдн - коэффициент датчика напряжения.
Далее с помощью элемента выборки-хранения 10 осуществляют коррекцию частоты дискретизации ƒs токов фаз в зависимости от измеренной величины питающего напряжения следующим образом:
где Uпн - номинальная величина питающего напряжения; ƒsн - частота дискретизации токов фаз при номинальном питающем напряжении.
При этом период дискретизации токов фаз Ts связан с частотой дискретизации ƒs токов фаз, длительностью измерительного интервала Tz и числом отсчетов N в выборке токов следующим образом:
Включение и отключение очередной j-той фазы вентильно-индукторного электрического двигателя в зависимости от ранее определенных моментов времени  и
и  при k-том цикле управления осуществляют логическим переключателем 3 и блоком коммутации фаз 4 по следующему закону:
при k-том цикле управления осуществляют логическим переключателем 3 и блоком коммутации фаз 4 по следующему закону:



Выходной сигнал логического переключателя Uлп.j - используют для управления силовым преобразователем 5, который подключает очередную j-тую фазу вентильно-индукторного электрического двигателя к напряжению источника питания 6 при Uлп.j=1 и отключает эту фазу при Uлп.j=0.
Момент времени таков, что при нем угловое положение ротора при ωk-1=ωr имеет величину  рассогласованного положения зубцов статора и ротора для j-той фазы:
рассогласованного положения зубцов статора и ротора для j-той фазы:

где ωk-1 - вычисленная средняя скорость вращения ротора при (k-1)-вом цикле управления.
Если же ωk-1≠ωr, что имеет место в динамических процессах, то в момент времени  вращение ротора опережает оптимальное для включения по энергетическим характеристикам угловое положение
вращение ротора опережает оптимальное для включения по энергетическим характеристикам угловое положение  на угол ϕj.k либо отстает от него:
на угол ϕj.k либо отстает от него:

При  фаза переходит в нежелательный генераторный режим.
фаза переходит в нежелательный генераторный режим.
Ток Ij во включенной j-той фазе при k-том цикле управления измеряют с помощью блока датчиков токов 8. Величину тока Iз.j в этой фазе задают с помощью блока задатчиков токов 1. Далее с помощью элемента выборки-хранения 10 накапливают дискретную по времени выборку ik[n] тока Ij в j-той фазе при его нарастании на измерительном интервале Tz.

Так как по фиг. 3 индуктивности фаз зависят от углового положения ротора, то форма токов фаз при нарастании на измерительном участке определяется электромагнитными переходными процессами и зависит от углов включения фаз, что показано на фиг. 4.
Затем в j-той включенной фазе с помощью блока регуляторов токов 2 формируют ток в зависимости от его заданного Iз.j и измеренного Ij значений по релейному закону:

Так как зависимости Lj(Θ) являются периодическими функциями и смещены на угол ΔΘτ, то для однозначного определения рассогласования положения зубцов статора и ротора в момент включения фазы требуется выборка токов двух фаз.
Далее с помощью элемента выборки-хранения 10 выборку тока очередной включенной j-той фазы при k-том цикле управления последовательно группируют с выборкой тока предшествующей включенной (j-1)-той фазы при (k-1)-том цикле управления, как показано на фиг. 5:


Согласно способу по прототипу выборку тока очередной включенной j-той фазы при k-том цикле управления последовательно группируют с выборкой тока следующей за ней (j+1)-той фазы при k-том цикле управления:


Далее с помощью вычислителя спектра 11 определяют гармонический состав Xk[h] сгруппированной выборки в виде вещественных (Re) и мнимых (Im) частей гармонических составляющих по формулам дискретного преобразования Фурье:

где h - порядковый номер гармонической составляющей в спектре, 0≤h<N.
Затем с помощью вычислителя рассогласования 12 определяют нормированное рассогласование  положения зубцов статора и ротора в момент включения j-той фазы:
положения зубцов статора и ротора в момент включения j-той фазы:

Зависимость (20) между гармоническим составом ReXk[h] и ImXk[h] сгруппированных выборок токов очередной включенной j-ой фазы и предшествующей включенной (j-1)-той фазы и нормированным рассогласованием  положения зубцов статора и ротора в момент включения j-ой фазы устанавливают заранее. Аналитическая форма зависимости (20) неизвестна и поэтому ее аппроксимируют с использованием математического аппарата искусственных нейронных сетей. Кроме того, для универсальности зависимости (20) при использовании ВИД разной конструкции, ее аппроксимируют для нормированной зависимости Lj(Θ).
положения зубцов статора и ротора в момент включения j-ой фазы устанавливают заранее. Аналитическая форма зависимости (20) неизвестна и поэтому ее аппроксимируют с использованием математического аппарата искусственных нейронных сетей. Кроме того, для универсальности зависимости (20) при использовании ВИД разной конструкции, ее аппроксимируют для нормированной зависимости Lj(Θ).
Далее с помощью корректора рассогласования 13 нормированное рассогласование  корректируют в зависимости от конструкции ВИД:
корректируют в зависимости от конструкции ВИД:

где Z и В - коэффициенты, учитывающие отличие зависимостей Lj(Θ) для каждого конкретного ВИД от нормированной зависимости Lj(Θ).
В момент времени отключают j-тую фазу в соответствии с (9). В этот момент времени угловое положение ротора при ωk-1=ωr равно  :
:

Если же ωk-1≠ωr, что имеет место в динамических процессах, то в момент времени  вращение ротора опережает прогнозируемое угловое положение
вращение ротора опережает прогнозируемое угловое положение  на угол γj.k либо отстает от него:
на угол γj.k либо отстает от него:

При  фаза переходит в нежелательный генераторный режим.
фаза переходит в нежелательный генераторный режим.
Затем с помощью вычислителя моментов коммутации фаз 14 рассчитывают интервал времени вращения ротора от момента времени включения j-той фазы при k-том цикле управления до включения (j+1)-той фазы при (k+1)-том цикле управления следующим образом:
где q - целое число, которое задают таким образом, чтобы при расчете по (24) величина  имела минимальную положительную величину.
имела минимальную положительную величину.
При этом скорость вращения ротора при k-том цикле управления считают постоянной и определяют по следующей формуле:
Прогнозируют, что при включении очередной (j+1)-той фазы при (k+1)-вом цикле управления ротор имеет положение  , равное рассогласованному положению
, равное рассогласованному положению  зубцов ротора и статора для этой фазы, что оптимально по энергетическим характеристикам для ее включения. Для этого с помощью вычислителя моментов коммутации фаз 14 определяют момент времени для включения (j+1)-вой фазы при (k+1)-вом цикле управления:
зубцов ротора и статора для этой фазы, что оптимально по энергетическим характеристикам для ее включения. Для этого с помощью вычислителя моментов коммутации фаз 14 определяют момент времени для включения (j+1)-вой фазы при (k+1)-вом цикле управления:

Прогнозируют, что при отключении очередной (j+1)-той фазы при каждом (k+1)-том цикле управления ротор имеет угловое положение, которое имеет упреждение по отношению к переходу фазы в генераторный режим:

С помощью вычислителя моментов коммутации 14 рассчитывают интервал времени вращения ротора от момента времени включения j-той фазы при k-том цикле управления до отключения (j+1)-той фазы при (k+1)-том цикле управления следующим образом:
С помощью вычислителя моментов коммутации фаз 14 определяют момент времени для отключения (j+1)-вой фазы при (k+1)-вом цикле управления с упреждением по отношению к переходу фазы в генераторный режим:

Элемент задержки 15 осуществляет временное разделение переменных для последовательных циклов управления. Для (k+1)-го цикла управления повторяют последовательность (4)-(29).
При управлении согласно способу по прототипу определяют моменты времени для последующего включения очередной фазы и следующей за ней фазы, а также моменты времени для их отключения. Для этого прогнозируют вращение ротора при k-том цикле управления по имеющейся информации о вращении ротора при (k-1)-вом цикле управления. Согласно способу по прототипу при k-том цикле управления в моменты времени  и
и  включают очередную j-ую фазу и следующую за ней (j+1)-вую фазу. В эти моменты времени угловые положения ротора при ωk-1=ωr равны
включают очередную j-ую фазу и следующую за ней (j+1)-вую фазу. В эти моменты времени угловые положения ротора при ωk-1=ωr равны  и
и  , то есть рассогласованным положениям зубцов ротора и статора:
, то есть рассогласованным положениям зубцов ротора и статора:


Если же ωk-1≠ωr, что имеет место в динамических процессах, то в моменты времени  и
и  вращение ротора опережает оптимальные по энергетическим характеристикам угловые положения
вращение ротора опережает оптимальные по энергетическим характеристикам угловые положения  и
и  на углы ϕj.k и ϕj+1.k соответственно либо отстает от них:
на углы ϕj.k и ϕj+1.k соответственно либо отстает от них:


При  и
и  фазы переходят в нежелательный генераторный режим.
фазы переходят в нежелательный генераторный режим.
Далее определяют нормированные рассогласования  и
и  зубцов статора и ротора в моменты времени включения фаз по заранее установленной зависимости:
зубцов статора и ротора в моменты времени включения фаз по заранее установленной зависимости:
Нормированные рассогласования  и
и  корректируют в зависимости от конструкции ВИД:
корректируют в зависимости от конструкции ВИД:

В моменты времени  и
и  при k-том цикле управления отключают j-тую и (j+1)-вую фазы. В эти моменты времени угловые положения ротора при ωk-1=ωr имеют величины
при k-том цикле управления отключают j-тую и (j+1)-вую фазы. В эти моменты времени угловые положения ротора при ωk-1=ωr имеют величины  и
и  :
:


Если же ωk-1≠ωr, что имеет место в динамических процессах, то в моменты времени  и
и  вращение ротора опережает прогнозируемые угловые положения
вращение ротора опережает прогнозируемые угловые положения  и
и  на углы γj.k и γj+1.k соответственно либо отстает от них:
на углы γj.k и γj+1.k соответственно либо отстает от них:


При  и
и  фазы переходят в нежелательный генераторный режим.
фазы переходят в нежелательный генераторный режим.
Затем определяют интервал времени вращения ротора от момента времени включения (j+1)-той фазы при k-том цикле управления до включения (j+2)-ой фазы и до включения (j+3)-ей фазы при (k+1)-том цикле управления следующим образом:

При этом скорость вращения ротора при k-том цикле управления считают постоянной и определяют по следующей формуле:
Прогнозируют, что при включении (j+2)-той и (j+3)-той фаз при (k+1)-том цикле управления ротор имеет положения  и
и  , равное рассогласованным положениям
, равное рассогласованным положениям  и
и  зубцов статора и ротора для этих фаз, что оптимально по энергетическим характеристикам для их включения. Для включения (j+2)-вой и (j+3)-вой фаз при (k+1)-ом цикле управления определяют моменты времени
зубцов статора и ротора для этих фаз, что оптимально по энергетическим характеристикам для их включения. Для включения (j+2)-вой и (j+3)-вой фаз при (k+1)-ом цикле управления определяют моменты времени  и
и  для их включения:
для их включения:

Прогнозируют, что при отключении (j+2)-той и (j+3)-той фаз при (k+1)-том цикле управления ротор имеет угловые положения с упреждениями к переходам фаз в генераторный режим  ,
,  :
:

Для этого рассчитывают интервалы времени вращения ротора от момента времени включения (j+1)-ой фазы при k-том цикле управления до отключения (j+2)-ой фазы и до отключения (j+3)-ой фазы при (k+1)-том цикле управления следующим образом:

Для (k+1)-го цикла управления определяют момент времени для отключения (j+2)-ой и (j+3)-ой фаз  и
и  :
:


Из сопоставления формул (11), (23), (33) и (39) следует, что при одинаковой величине Δωk при управлении согласно способу с улучшенными энергетическими характеристиками величины ϕj.k и γj.k существенно меньше, чем величины ϕj+1.k и γj+1.k при управлении согласно способу по прототипу. Это связано с тем, что при для k-том цикле управления информация об угловом положении ротора обновляется быстрее, и  по (24) и
по (24) и  по (28) при управлении согласно способу с улучшенными энергетическими характеристиками имеют меньшие величины, чем
по (28) при управлении согласно способу с улучшенными энергетическими характеристиками имеют меньшие величины, чем  по (40) и
по (40) и  по (44) при способе управления по прототипу. За меньшие интервалы времени накапливаются меньшие рассогласование ϕj.k и отклонение γj.k. Кроме того, за большие интервалы времени
по (44) при способе управления по прототипу. За меньшие интервалы времени накапливаются меньшие рассогласование ϕj.k и отклонение γj.k. Кроме того, за большие интервалы времени  и
и  при способе управления по прототипу возможны большие отклонения скорости вращения ротора ωr от рассчитанной скорости вращения ротора ωk-1 под действием динамического момента, что увеличивает накопление рассогласований и отклонений. Меньшие отклонения от оптимальных углов включения и углов отключения фаз при управлении согласно способу с улучшенными энергетическими характеристиками приводят к меньшей длительности протекания токов на генераторных участках Lj(Θ) и к меньшей величине нежелательного генераторного момента, что означает повышение энергетических характеристик ВИД при управлении.
при способе управления по прототипу возможны большие отклонения скорости вращения ротора ωr от рассчитанной скорости вращения ротора ωk-1 под действием динамического момента, что увеличивает накопление рассогласований и отклонений. Меньшие отклонения от оптимальных углов включения и углов отключения фаз при управлении согласно способу с улучшенными энергетическими характеристиками приводят к меньшей длительности протекания токов на генераторных участках Lj(Θ) и к меньшей величине нежелательного генераторного момента, что означает повышение энергетических характеристик ВИД при управлении.
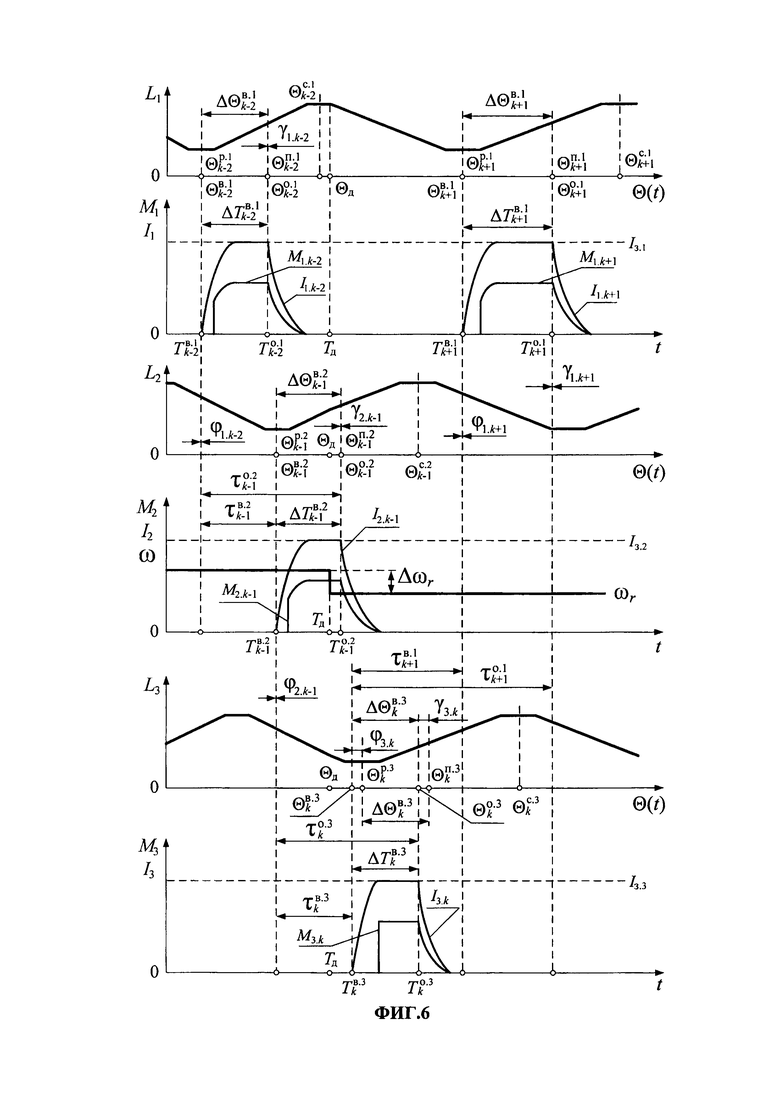
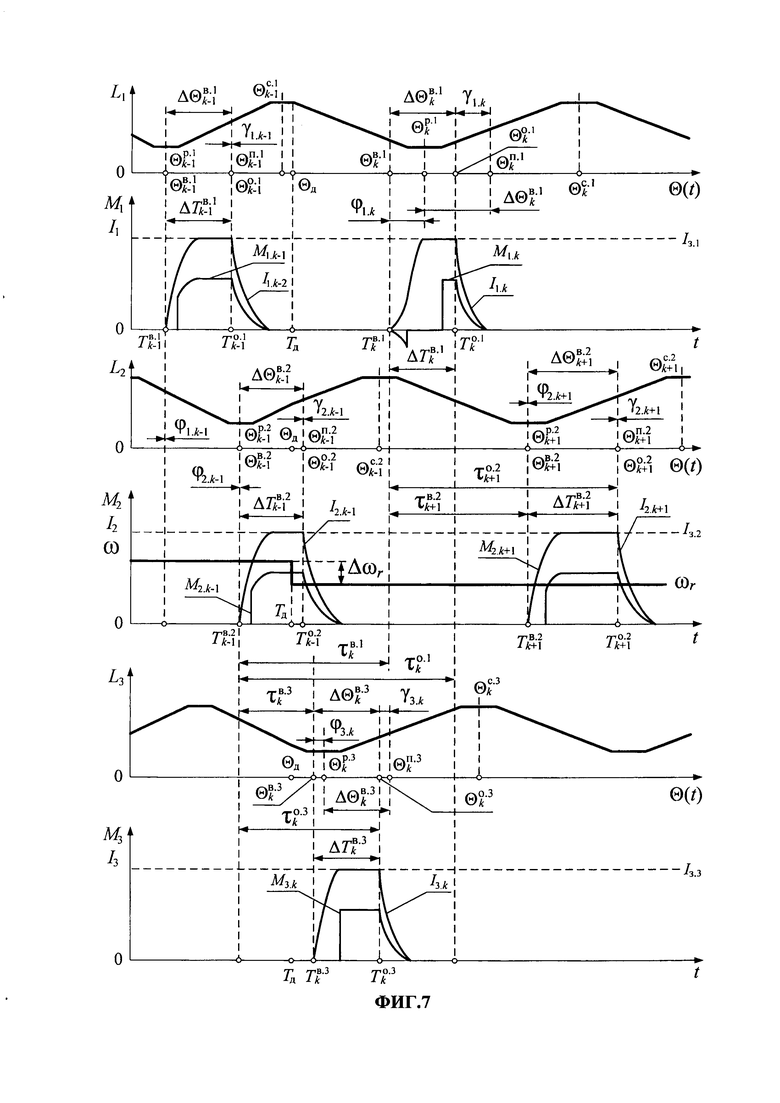
Вентильно-индукторный электрический двигатель имеет число фаз m=3 (j=1, 2, 3), число зубцов статора zs=6 и число зубцов ротора zr=4. Диаграммы при управлении согласно способу с улучшенными энергетическими характеристиками показаны на фиг. 6 для (k-2)-го, (k-1)-го, k-го и (k+1)-го циклов управления, а диаграммы при управлении согласно способу по прототипу показаны на фиг. 7 для (k-1)-го, k-го и (k+1)-го циклов управления.
При управлении согласно способу с улучшенными энергетическими характеристиками фазу j=1 при (k-2)-ом цикле управления включают в момент времени  , а фазу j=2 при следующем (k-1)-ом цикле управления включают в момент времени
, а фазу j=2 при следующем (k-1)-ом цикле управления включают в момент времени  таким образом, что
таким образом, что  и
и  . При этом ϕ1.k-2=0, ϕ2.k-1=0, ωk-2=ωr. Эти же фазы отключают в моменты времени
. При этом ϕ1.k-2=0, ϕ2.k-1=0, ωk-2=ωr. Эти же фазы отключают в моменты времени  соответственно таким образом, что
соответственно таким образом, что  и
и  . Токи этих фаз I1.k-2 и I2.k-1 протекают главным образом на двигательных участках характеристик L1(Θ) и L2(Θ), создавая при этом двигательные моменты и M1.k-2 и М2.k-1.
. Токи этих фаз I1.k-2 и I2.k-1 протекают главным образом на двигательных участках характеристик L1(Θ) и L2(Θ), создавая при этом двигательные моменты и M1.k-2 и М2.k-1.
В момент времени Тд, которому соответствует угловое положение ротора Θд, происходит уменьшение скорости вращения ротора ωr на величину Δωr. Выявить изменение скорости согласно способу с улучшенными энергетическими характеристиками, как и согласно способу по прототипу, возможно только в последующих за моментом времени Тд циклах управления. Поэтому очередную фазу j=3 при k-том цикле управления включают в момент времени  , который был спрогнозирован без учета изменения скорости вращения ротора и ωk-1<ωr:
, который был спрогнозирован без учета изменения скорости вращения ротора и ωk-1<ωr:

Угол включения этой фазы вследствие изменения скорости вращения ротора не соответствует прогнозированному значению  :
:

Фазу j=3 отключают в момент времени  и угол отключения этой фазы не равен прогнозируемой величине
и угол отключения этой фазы не равен прогнозируемой величине  :
:


Ток этой j=3 фазы I3.k протекает в значительной мере при рассогласованном положении зубцов статора и ротора и в меньшей мере на двигательном участке характеристики L3(Θ) по сравнению с (k-2)-рым и (k-1)-вым циклами управления. Ток создает двигательный момент М3.k, который по среднему значению меньше, чем М1.k-2 и M2.k-1.
Рассогласование зубцов ротора и статора ϕ3.k выявляется устройством для осуществления способа управления с улучшенными энергетическими характеристиками. Далее при (k+1)-ом цикле управления включение и отключение фазы j=1 происходит при оптимальных углах:

При управлении согласно способу по прототипу при (k-1)-ом цикле управления фазы j=1 и j=2 включают в моменты времени  и
и  таким образом, что
таким образом, что  ,
,  , ϕ1.k-2=0, ϕ2.k-1=0 и ωk-1=ωr. Эти фазы отключают в моменты времени
, ϕ1.k-2=0, ϕ2.k-1=0 и ωk-1=ωr. Эти фазы отключают в моменты времени  и
и  таким образом, что
таким образом, что  и
и  . Токи I1.k-1 и I2.k-1 этих фаз протекают главным образом на двигательных участках характеристик L1(Θ) и L2(Θ), создавая при этом двигательные моменты M1.k-1 и M2.k-1. В момент времени Тд, которому соответствует угловое положение ротора Θд, происходит уменьшение скорости вращения ротора ωr на величину Δωr. Выявить это изменение скорости согласно способу по прототипу возможно только в последующих за моментом времени Tд циклах управления. Поэтому очередную фазу j=3 при k-том цикле управления включают в момент времени
. Токи I1.k-1 и I2.k-1 этих фаз протекают главным образом на двигательных участках характеристик L1(Θ) и L2(Θ), создавая при этом двигательные моменты M1.k-1 и M2.k-1. В момент времени Тд, которому соответствует угловое положение ротора Θд, происходит уменьшение скорости вращения ротора ωr на величину Δωr. Выявить это изменение скорости согласно способу по прототипу возможно только в последующих за моментом времени Tд циклах управления. Поэтому очередную фазу j=3 при k-том цикле управления включают в момент времени  , который был спрогнозирован без учета изменения скорости вращения ротора и ωk-1<ωr:
, который был спрогнозирован без учета изменения скорости вращения ротора и ωk-1<ωr:

Угол включения этой фазы вследствие изменения скорости вращения ротора не соответствует прогнозированному значению  :
:

Фазу j=3 отключают в момент времени  , но угол отключения этой фазы не равен прогнозируемой величине
, но угол отключения этой фазы не равен прогнозируемой величине  :
:


Вследствие этого I3.k создает двигательный момент М3.k, который по среднему значению меньше, чем M1.k-1 и M2.k-1.
Далее при текущем k-том цикле управления в момент времени  включают следующую фазу j=1 таким образом, что
включают следующую фазу j=1 таким образом, что

С течением времени вследствие изменения скорости вращения ротора рассогласование накапливается, а именно, ϕ1.k>ϕ3.k и γ1.k>γ3.k.
Фазу j=1 отключают в момент времени  , но угол отключения этой фазы не равен прогнозируемой величине
, но угол отключения этой фазы не равен прогнозируемой величине  :
:


Ток этой j=1 фазы I1.k начинает протекать на генераторном участке характеристики L1(Θ), протекает на всем участке рассогласованного положения зубцов статора и ротора и в меньшей мере на двигательном участке характеристики L1(Θ) по сравнению с токами при предыдущих циклах управления, а момент M1.k, значительно меньше, чем М1.k-1, М2.k-1 и М3.k. Происходит нежелательный переход фазы j=1 в генераторный режим, а при рассогласованном положении зубцов ротора и статора фаза не создает момент. Это вызывает снижение энергетических характеристик.
Рассогласования зубцов ротора и статора ϕ3.k и ϕ1.k выявляется устройством для осуществления способа управления по прототипу и при следующем (k+1)-ом цикле управления для фазы j=2:

Можно показать достижение заявленного технического результата при увеличении скорости вращения ротора ωr, на величину Δωr, когда при увеличении γj.k может исчезнуть упреждение при отключении фаз по отношению к их переходу в генераторный режим  .
.
Средняя величина М3.k при k-том цикле управления при способе управления с улучшенными энергетическими характеристиками больше, чем средние значения моментов М3.k и М1.k при k-том цикле управления согласно способу по прототипу, так как при способе управления с улучшенными энергетическими характеристиками в меньшей степени происходит нежелательный переход фаз в генераторный режим, а также фазы быстрее выводятся из этого режима. Следовательно, способ управления с улучшенными энергетическими характеристиками позволяет повысить качество управления вентильно-индукторным электрическим двигателем.
Использование изобретения позволяет улучшить энергетические характеристики при управлении вентильно-индукторным электрическим двигателем в электроприводах различных механизмов, в том числе, в электроприводах насосов, компрессоров, вентиляторов, бытовой техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ РЕАКТИВНЫМ ДВИГАТЕЛЕМ С МАКСИМАЛЬНОЙ ЭНЕРГОЭФФЕКТИВНОСТЬЮ | 2021 |
|
RU2795851C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОЙ МАШИНОЙ | 2003 |
|
RU2242837C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ РЕАКТИВНАЯ МАШИНА | 2021 |
|
RU2780383C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2571955C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2266604C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2016 |
|
RU2629753C2 |
Изобретение относится к области электротехники и может быть использовано в электроприводах различных механизмов. Техническим результатом является повышение качества управления вентильно-индукторным электрическим двигателем. В способе управления вентильно-индукторным электрическим двигателем, включающем при каждом цикле управления измерение питающего напряжения, коррекцию частоты дискретизации токов фаз в зависимости от измеренной величины питающего напряжения, включение очередной фазы в зависимости от определенного ранее момента времени, измерение тока в ней, задание тока в ней, накопление дискретной по времени выборки тока этой фазы при его нарастании на измерительном интервале, формирование в этой фазе тока в зависимости от его заданного и измеренного значений по релейному закону, отключение этой фазы в зависимости от определенного ранее момента времени, выборку тока очередной включенной фазы последовательно группируют с выборкой тока предшествующей включенной фазы, далее определяют гармонический состав сгруппированной выборки, затем определяют нормированное рассогласование положения зубцов статора и ротора в момент включения фазы, затем корректируют нормированное рассогласование, далее определяют момент времени для последующего включения очередной фазы и момент времени для отключения этой фазы, причем момент времени для включения фазы определяют таким образом, чтобы он соответствовал рассогласованному положению зубцов статора и ротора для этой фазы, момент времени для отключения фазы определяют таким образом, чтобы он имел упреждение по отношению к переходу фазы в генераторный режим, а зависимость между гармоническим составом сгруппированных выборок токов очередной включенной фазы и предшествующей включенной фазы и нормированным рассогласованием положения зубцов статора и ротора вентильно-индукторного электрического двигателя устанавливают заранее. 5 ил.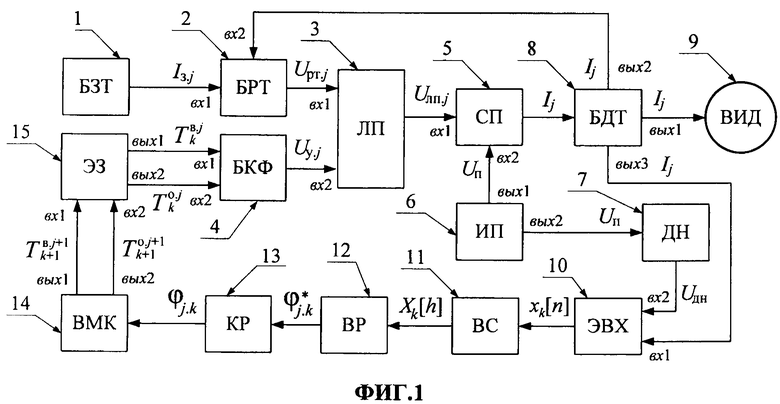
Способ управления вентильно-индукторным электрическим двигателем, включающий при каждом цикле управления измерение питающего напряжения, коррекцию частоты дискретизации токов фаз в зависимости от измеренной величины питающего напряжения, включение очередной фазы в зависимости от определенного ранее момента времени, измерение тока в ней, задание тока в ней, накопление дискретной по времени выборки тока этой фазы при его нарастании на измерительном интервале, формирование в этой фазе тока в зависимости от его заданного и измеренного значений по релейному закону, отключение этой фазы в зависимости от определенного ранее момента времени, отличающийся тем, что выборку тока очередной включенной фазы последовательно группируют с выборкой тока предшествующей включенной фазы, далее определяют гармонический состав сгруппированной выборки, определяют нормированное рассогласование положения зубцов статора и ротора в момент включения фазы, корректируют нормированное рассогласование, далее определяют момент времени для последующего включения очередной фазы и момент времени для отключения этой фазы, причем момент времени для включения фазы определяют таким образом, чтобы он соответствовал рассогласованному положению зубцов статора и ротора для этой фазы, момент времени для отключения фазы определяют таким образом, чтобы он имел упреждение по отношению к переходу фазы в генераторный режим, а зависимость между гармоническим составом сгруппированных выборок токов очередной включенной фазы и предшествующей включенной фазы и нормированным рассогласованием положения зубцов статора и ротора вентильно-индукторного электрического двигателя устанавливают заранее.
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| СПОСОБ ВРЕМЕННОГО СОСУДИСТОГО БАЙПАСА ПРИ РЕЗЕКЦИИ МАГИСТРАЛЬНЫХ ВЕН МЕЗЕНТЕРИКО-ПОРТАЛЬНОЙ СИСТЕМЫ | 2006 |
|
RU2329770C1 |
| DE 4314211 A1, 03.11.1994 | |||
| JP 2002354881 A, 06.12.2002 | |||
| US 5903127 A, 11.05.1999 | |||
| EP 1023768 A2, 02.08.2000. | |||

