Изобретение относится к электротехнике, а точнее к способам управления реактивным индукторным двигателем (РИД), имеющим зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых запитывается однополярными импульсами тока от полумостового инвертора напряжения (ИН), и зубчатый безобмоточный ротор.
Известен способ управления индукторным двигателем (см. Патент РФ RU 2118039 С1, опубл. 20.08.98, Бюл. №23.).
В данном источнике заявляется способ управления РИД, в котором измеряют каждый период сигнала датчика положения ротора (ДПР), по измеренному периоду вычисляют временные интервалы, определяющие начало и окончание зон, содержащих импульсы управления силовыми ключами инвертора напряжения, причем отсчет вычисленных временных интервалов производится от каждого фронта сигнала ДПР.
Недостатком данного способа является влияние погрешности изготовления ДПР как на длительности временных интервалов, определяющих начало и окончание импульсов управления, так и на их фазу.
Предлагаемое изобретение направлено на достижение минимизации влияния погрешности изготовления датчика положения ротора на временные параметры сигналов управления РИД и, следовательно, на качество управления.
Способ управления реактивным индукторным двигателем, заключающийся в том, что измеряют период Tдпр сигнала фазы датчика положения ротора (ДПР), вычисляют временные интервалы, определяющие начало ton и окончание toff относительно начала следующего периода ДПР зон, каждая из которых содержит как минимум один импульс управления одним из двух силовых ключей данной фазы инвертора напряжения и соответствует одному импульсу фазного тока двигателя, ставя их в соответствие длительности измеренного периода сигнала ДПР, и по результатам измерений и вычислений формируют последовательность импульсов управления силовыми ключами каждой фазы инвертора напряжения, согласно данному заявлению дополнительно характеризуется следующими признаками, согласно которым измеряют длительность периода ДПР между всеми соседними одноименными фронтами всех фаз ДПР, и по результатам измерений после фиксации каждого фронта сигналов ДПР вычисляют новые значения временного интервала ton, а также временных интервалов toff1 и toff2 от начала текущего периода ДПР до требуемых моментов времени окончания зон импульсов управления первым и вторым ключом данной фазы инвертора напряжения соответственно; один из фронтов сигнала одной из фаз ДПР принимают за базовый, и один раз за оборот ротора двигателя определяют временные интервалы от момента синхронизации, наступающего по истечении временного интервала tdel после возникновения базового фронта сигнала ДПР, до ближайшего начала зон подачи импульсов управления на два силовых ключа фазы инвертора напряжения t1on и ближайших окончаний зон подачи импульсов управления на первый и второй ключ t1off1 и t1off2 соответственно согласно формулам:
t1on=ton-tdel-k1·Тдпр/m;
t1off1=toff1-tdel-k2·Tдпр/m;
t1off2=toff2-tdel-k3·Tдпр/m,
где m - число фаз двигателя, k1-k3 - целые неотрицательные коэффициенты, такие, что
0<t1on<ton-tdel,
0<t1off1<toff1-tdel,
0<t1off2<toff2-tdel,
и, отсчитывая данные интервалы времени от момента синхронизации, начинают формировать последовательность импульсов управления силовыми ключами инвертора напряжения, в которой интервалы времени между последующими одноименными переключениями зон импульсов управления для соседних фаз двигателя Δton, Δtoff1 и Δtoff2 соответственно принимают равными
Δton=Тдпр/m+ton+-ton-;
Δtoff1=Тдпр/m+toff1+-toff1-;
Δtoff2=Тдпр/m+toff2+-toff2-,
где Tдпр - последнее измеренное на данный момент времени значение периода сигнала датчика положения ротора, индексы - и + означают старое и новое вычисленные значения соответствующих интервалов времени; и после каждого запуска такого интервала на отработку производят переприсвоения:
ton-:=ton+;
toff1-:=toff1+;
toff2-:=toff2+,
и в дальнейшем один раз за оборот двигателя, после каждого момента синхронизации, подменяют вновь вычисленными интервалами времени t1on, t1off1 и t1off2 формировавшиеся на предыдущем обороте двигателя интервалы времени между моментами переключений зон Δton, Δtoff1 и Δtoff2 соответственно, тем самым осуществляя фазовую подстройку последовательности импульсов управления относительно последовательности импульсов ДПР.
Изобретение поясняется со ссылкой на прилагаемый чертеж, на котором показан участок временной диаграммы формирования последовательности импульсов управления силовыми ключами инвертора напряжения на примере трехфазного РИД до и после момента синхронизации:
- ДПРk - сигналы датчика положения ротора k-й фазы РИД, где k принимает значения А, В, С;
- mVTLk, mVTHk - сигналы управления ключами k-й фазы ИН;
- uA - напряжение, приложенное к обмотке фазы А;
- iА - ток фазы А РИД;
- tsync - момент синхронизации.
Предлагаемый способ управления может быть реализован с помощью системы управления на базе микроконтроллера. При этом измерение периодов сигналов ДПР и отработка вычисленных временных интервалов могут быть реализованы с использованием системы прерываний микроконтроллера и таймеров. Также для этого может использоваться контроллер событий.
Следует отметить, что, несмотря на то, что на чертеже измеряемые интервалы времени Tдпр и вычисляемые Δton, Δtoff1 и Δtоff2 показаны неизменными, в реальной системе при изменении частоты вращения двигателя значения переменной Tдпр и, соответственно, зависящие от них значения переменных ton, toff1, toff2, Δton, Δtoff1 и Δtoff2 и другие могут изменяться.
Следует также отметить, что на чертеже каждая зона подачи импульсов управления на каждый ключ содержит только один импульс управления, в реальной же системе их может быть несколько.
Интервал времени tdel необходим для расчетов новых значений интервалов времени ton, toff1 и toff2 и поиска ближайших к точке синхронизации каждого из моментов смены зон импульсов управления. По его истечении отработку старых временных интервалов принудительно прерывают (на чертеже показано крестиками) и начинают отработку новых интервалов со вновь вычисленными значениями времен, тем самым осуществляя фазовую подстройку последовательности импульсов управления относительно последовательности импульсов ДПР.
Применение данного способа позволяет исключить влияние на параметры импульсов управления погрешности взаимного углового расположения фазных датчиков положения ротора, а также скважности диска ДПР, так как моменты возникновения всех фронтов ДПР, кроме базового, не влияют на фазу генерируемой последовательности импульсов управления, а влияют только на измеренные значения периодов ДПР, входящие в формулы для вычисления новых временных интервалов после измерения каждого периода ДПР. Это обеспечивает коррекцию временных параметров последовательности импульсов управления после каждого фронта сигналов ДПР, то есть 2mдпрzr раз за оборот двигателя, где mдпр - число фаз сигнала ДПР РИД, которое в большинстве случаев равно числу фаз двигателя m; zr - число зубцов ротора РИД. При этом погрешности угловых значений одноименных фронтов диска ДПР приводят к разбросу только длительностей, но не фаз управляющих импульсов.
Технический эффект настоящего изобретения состоит в минимизации влияния погрешностей изготовления датчика положения ротора РИД за счет синхронизации последовательности управляющих импульсов с последовательностью импульсов ДПР РИД один раз за оборот двигателя с коррекцией временных параметров последовательности импульсов управления после каждого измерения периода сигналов ДПР.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2242083C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2229768C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2372708C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2249298C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| МНОГОУРОВНЕВЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2002 |
|
RU2259628C2 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНДУКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ СО СТАРТОВЫМИ ПОЛЮСАМИ (ВАРИАНТЫ) | 1994 |
|
RU2091977C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2237341C1 |
Изобретение относится к области электротехники и может быть использовано для управления реактивным индукторным двигателем (РИД), имеющим зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых запитывается однополярными импульсами тока от полумостового инвертора напряжения (ИН), и зубчатый безобмоточный ротор. Техническим результатом является минимизация влияния погрешности изготовления датчика положения ротора (ДПР) на временные параметры сигналов управления РИД и на качество его управления. В способе управления реактивным индукторным двигателем измеряют длительность периода ДПР между всеми соседними одноименными фронтами всех фаз ДПР, и по результатам измерений вычисляют временные интервалы, определяющие начало ton и окончания toff1 и toff2 относительно начала следующего периода ДПР зон подачи импульсов управления на силовые ключи данной фазы инвертора напряжения, ставя их в соответствие длительности измеренного периода сигнала ДПР, и по результатам измерений и вычислений формируют последовательность импульсов управления силовыми ключами каждой фазы инвертора напряжения; при этом один из фронтов сигнала одной из фаз ДПР принимают за базовый, и один раз за оборот ротора двигателя определяют временные интервалы от момента синхронизации, наступающего по истечении временного интервала tdel после возникновения базового фронта сигнала ДПР, до ближайшего начала зон подачи импульсов управления на два силовых ключа фазы инвертора напряжения t1on и ближайших окончаний зон подачи импульсов управления на первый и второй ключ и, отсчитывая данные интервалы времени от момента синхронизации, начинают формировать последовательность импульсов управления силовыми ключами инвертора напряжения, в которой интервалы времени между последующими одноименными переключениями зон импульсов управления для соседних фаз двигателя соответственно принимают равными. В дальнейшем один раз за оборот двигателя подменяют вновь вычисленными интервалами времени соответствующие интервалы времени, формировавшиеся на предыдущем обороте двигателя, осуществляя фазовую подстройку последовательности импульсов управления относительно последовательности импульсов ДПР. 1 ил.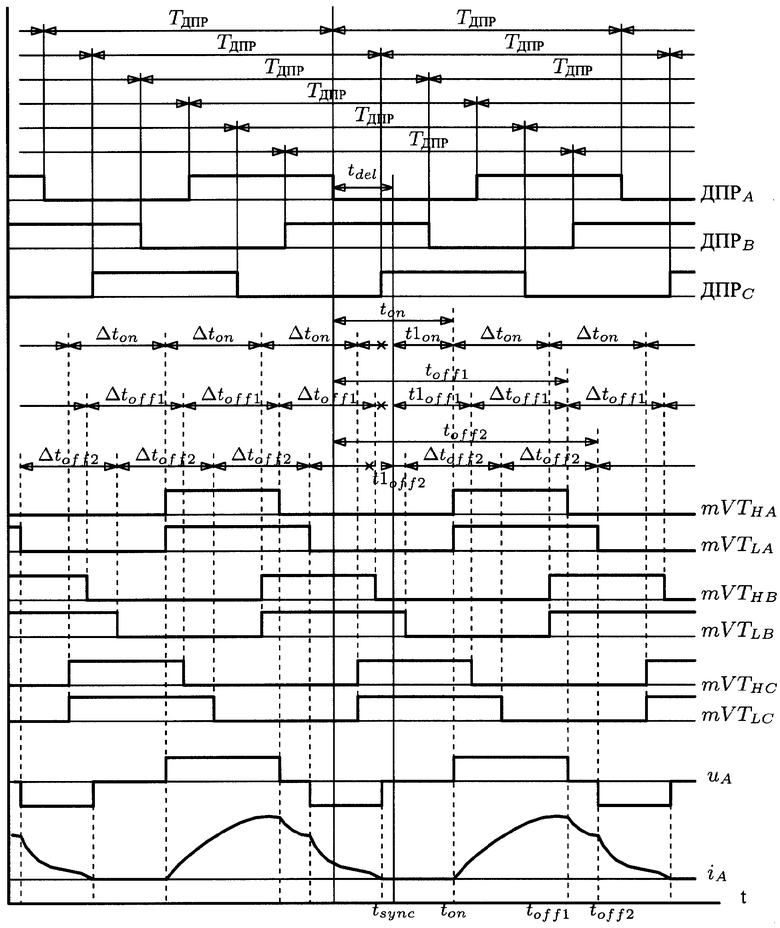
Способ управления реактивным индукторным двигателем, заключающийся в том, что измеряют период ТДПР сигнала фазы датчика положения ротора (ДПР), вычисляют временные интервалы, определяющие начало ton и окончание toff относительно начала следующего периода ДПР зон, каждая из которых содержит как минимум один импульс управления одним из двух силовых ключей данной фазы инвертора напряжения и соответствует одному импульсу фазного тока двигателя, ставя их в соответствие длительности измеренного периода сигнала ДПР, и по результатам измерений и вычислений формируют последовательность импульсов управления силовыми ключами каждой фазы инвертора напряжения, отличающийся тем, что измеряют длительность периода ДПР между всеми соседними одноименными фронтами всех фаз ДПР и по результатам измерений после фиксации каждого фронта сигналов ДПР вычисляют новые значения временного интервала ton, а также временных интервалов toff1 и toff2 от начала текущего периода ДПР до требуемых моментов времени окончания зон импульсов управления первым и вторым ключом данной фазы инвертора напряжения соответственно, один из фронтов сигнала одной из фаз ДПР принимают за базовый и один раз за оборот ротора двигателя определяют временные интервалы от момента синхронизации, наступающего по истечении временного интервала tdel после возникновения базового фронта сигнала ДПР до ближайшего начала зон подачи импульсов управления на два силовых ключа фазы инвертора напряжения t1on и ближайших окончаний зон подачи импульсов управления на первый и второй ключ t1off1 и f1off2 соответственно согласно формулам
t1on=ton-tdel-k1·ТДПР/m;
t1off1=toff1-tdel-k2·ТДПР/m;
t1off2=toff2-tdel-k3·ТДПР/m,
где m - число фаз двигателя, k1-k3 - целые неотрицательные коэффициенты, такие что
0<t1on<ton-tdel;
0<t1off1<toff1-tdel;
0<t1off2<toff2-tdel,
и, отсчитывая данные интервалы времени от момента синхронизации, начинают формировать последовательность импульсов управления силовыми ключами инвертора напряжения, в которой интервалы времени между последующими одноименными переключениями зон импульсов управления для соседних фаз двигателя Δton, Δtoff1 и Δtoff2 соответственно принимают равными
Δton=ТДПР/m+ton+-ton-;
Δtoff1=ТДПР/m+toff1+-toff1-;
Δtoff2=ТДПР/m+toff2+-toff2-,
где ТДПР - последнее измеренное на данный момент времени значение периода сигнала датчика положения ротора, индексы - и + означают старое и новое вычисленные значения соответствующих интервалов времени; и после каждого запуска такого интервала на отработку производят переприсвоения:
ton-:=ton+;
toff1-:=toff1+;
toff2-:=toff2+,
и в дальнейшем один раз за оборот двигателя после каждого момента синхронизации подменяют вновь вычисленными интервалами времени t1on, t1off1 и t1off2 формировавшиеся на предыдущем обороте двигателя интервалы времени между моментами переключений зон Δton, Δtoff1 и Δtoff2 соответственно, тем самым осуществляя фазовую подстройку последовательности импульсов управления относительно последовательности импульсов ДПР.
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2000 |
|
RU2207700C2 |
| Автоматический аппарат для производства бухгалтерских, статистических и т.п. подсчетов | 1924 |
|
SU1774A1 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| СПОСОБ ЗАЩИТЫ ДОКУМЕНТОВ ИЛИ ЦЕННЫХ ОБЪЕКТОВ | 2000 |
|
RU2167253C1 |
| US 4647802 А, 03.03.1987 | |||
| DE 3826892 С2, 16.02.1989 | |||
| Катковый гусеничный движитель | 1973 |
|
SU472052A1 |
| Огнетушитель | 0 |
|
SU91A1 |

