Изобретение относится к области электротехники, а именно к способам управления вентильно-индукторным реактивным двигателем (ВИРД), имеющим зубчатый безобмоточный ротор и зубчатый статор, на котором расположены катушечные фазные обмотки, каждая из которых по сигналам датчика положения ротора (ДПР) запитывается однополярными импульсами тока от полумостового инвертора напряжения (ИН), и может быть использовано при повышенных требованиях к энергоэффективности и энергосбережению в регулируемых электроприводах насосов и вентиляторов в жилищно-коммунальном хозяйстве и различных областях промышленности.
Целью предлагаемого изобретения является повышение коэффициента полезного действия (КПД) уже изготовленных и работающих ВИРД с помощью оптимизации их управления.
Основным режимом работы ВИРД регулируемых электроприводов насосов и вентиляторов в рабочем диапазоне частот вращения является одноимпульсный с фазовым управлением (напряжение на шине постоянного тока неизменное в пределах допусков). В этом случае на его фазную обмотку от ИН подается прямоугольный импульс напряжения, фазовые параметры которого (угол включения αвкл, длительность импульса напряжения αимп и длительность паузы напряжения αп) регулируются микропроцессорной системой управления. На фиг. 1 показаны графики зависимостей фазных индуктивности L, напряжения u и тока i в функции углового положения ротора относительно статора α и параметры фазового управления ВИРД.
Для определения положения зубцов ротора относительно зубцов статора используется ДПР, по сигналам которого на фазные обмотки подаются импульсы напряжения. Угол α может быть представлен в электрических радианах  или в электрических градусах
или в электрических градусах  , где Z2 - число зубцов ротора; n - частота вращения ротора, мин-1.
, где Z2 - число зубцов ротора; n - частота вращения ротора, мин-1.
Известен способ бездатчикового управления вентильно-индукторным электрическим двигателем (Полющенко И.С.Способ управления вентильно-индукторным двигателем. Патент RU 2716129 С1, 2020 г., опубликовано Бюл. №7 от 06.03.2020), включающий при каждом цикле управления измерение питающего напряжения, коррекцию частоты дискретизации токов фаз в зависимости от измеренной величины питающего напряжения, включение очередной фазы в зависимости от определенного ранее момента времени, измерение и задание тока в ней, накопление дискретной по времени выборки тока этой фазы при его нарастании на измеряемом интервале, формирование в этой фазе тока в зависимости от его заданного и измеренного значений по релейному закону, отключение этой фазы в зависимости от определенного ранее момента времени. При этом выборку тока очередной включенной фазы последовательно группируют с выборкой тока предшествующей включенной фазы, далее определяют гармонический состав сгруппированной выборки, определяют нормированное рассогласование положения зубцов статора и ротора в момент включения фазы, корректируют нормированное рассогласование, далее определяют момент времени для последующего включения очередной фазы и момент времени для отключения этой фазы.
Причем момент времени для включения фазы определяют таким образом, чтобы он соответствовал рассогласованному положению зубцов статора и ротора для этой фазы, момент времени для отключения фазы определяют таким образом, чтобы он имел упреждение по отношению к переходу фазы в генераторный режим, а зависимость между гармоническим составом сгруппированных выборок токов очередной включенной фазы и предшествующей включенной фазы и нормированным рассогласованием положения зубцов статора и ротора вентильно-индукторного электрического двигателя устанавливают заранее.
Недостатком этого способа является сложность системы бездатчикового управления и то, что вентильно-индукторный двигатель работает не с максимальным коэффициентом полезного действия (КПД).
Наиболее близким по технической сущности к заявляемому изобретению является способ управления ВИРД (см. Крайнов Д.В. Вентильно-индукторный электропривод. Алгоритмы и микропроцессорные системы управления. Дис. на соискание ученой степени канд. техн. наук. - Новочеркасск, 2001. -154 с.), в котором управление ключами ИН осуществляется по сигналам ДПР, а параметры фазового управления выбираются такими, чтобы на разных частотах вращения достигался максимум вращающего момента.
Недостатком такого способа является то, что вентильно-индукторный двигатель работает по траектории максимального момента с увеличенным током в фазах и как следствие с повышенными потерями, т.е. не с максимальным КПД. Также недостатком является то, что варьируются все три параметра управления. Это существенно усложняет выбор их оптимальных значений.
Предлагаемый способ управления ВИРД направлен на повышение энергоэффективности уже изготовленных и работающих в заданном диапазоне частот вращения регулируемых ВИРП за счет оптимизации и упрощения алгоритма управления.
Согласно заявляемого технического решения поставленная цель достигается путем сокращения при управлении электроприводом варьируемых параметров фазового управления с трех независимых переменных (αвкл, αимп и αп) до одной за счет определения такого их сочетания, которое обеспечивает максимум КПД в заданном диапазоне частот вращения и моментов нагрузки.
Предлагаемый способ управления вентильно-индукторным реактивным двигателем, имеющим зубчатый безобмоточный ротор и зубчатый статор, на котором расположены катушечные фазные обмотки, каждую из которых запитывают по сигналам датчика положения ротора однополярными импульсами тока от полумостового инвертора напряжения, заключается в том, что для изготовленного двигателя сначала экспериментально снимают двухмерные зависимости вращающего момента от частоты вращения и параметров фазового управления: угла включения αвкл и длительности импульса напряжения αимп, затем по этим зависимостям рассчитывают аналогичные зависимости коэффициента полезного действия η и определяют оптимальную тройку взаимосвязанных значений параметров управления αвкл_ηmax, αимп_ηmax, и αп_ηmax, при которых функция η (αвкл, αимп) достигает максимального значения, при этом длительность паузы импульса напряжения определяется по формуле  =180 - αимп_ηmax.
=180 - αимп_ηmax.
Способ управления, характеризующийся тем, что для изготовленного двигателя с помощью экспериментально снятых двухмерных зависимостей вращающего момента М(αвкл,n) и М(αимп,n) и найденных оптимальных пар параметров управления αвкл_ηmax и  , при которых достигается максимум КПД, определяют для разных частот вращения соответствующие траектории изменения момента, а затем формируются двухмерные зависимости оптимальных параметров фазового управления от момента и частоты вращения
, при которых достигается максимум КПД, определяют для разных частот вращения соответствующие траектории изменения момента, а затем формируются двухмерные зависимости оптимальных параметров фазового управления от момента и частоты вращения  и
и  , обеспечивающие индивидуальное управление изготовленным индукторным двигателем с максимальной энергоэффективностью.
, обеспечивающие индивидуальное управление изготовленным индукторным двигателем с максимальной энергоэффективностью.
В дальнейшем реализацию предлагаемого изобретения и суть способа управления иллюстрируют фиг. 1-7, на которых изображено:
фиг. 1 - зависимость фазных индуктивности L, напряжения u и тока i в функции углового положения ротора относительно статора α;
фиг. 2 - зависимость момента от угла включения и длительности импульса n=nном,
фиг. 3 - зависимость момента от угла включения и длительности импульса n=0.6nном;
фиг. 4 - зависимость КПД от угла включения и длительности импульса при n=nном;
фиг. 5- зависимость КПД от угла включения и длительности импульса при n=0.6 nном;
фиг. 6 - зависимость оптимальных значений угла включения от момента и частоты вращения в заданном диапазоне;
фиг. 7 - зависимость оптимальных значений длительности импульса от момента и частоты вращения в заданном диапазоне.
Способ реализуется следующим образом: на изготовленном вентильно-индукторным реактивным двигателе, имеющем зубчатый безобмоточный ротор и зубчатый статор, на котором расположены катушечные фазные обмотки, каждая из которых по сигналам датчика положения ротора запитывается однополярными импульсами тока от полумостового инвертора напряжения (см. фиг. 1) экспериментально с использованием датчика момента снимают зависимости вращающего момента в функции параметров управления и частоты вращения из заданного диапазона. На фиг. 2 и 3 приведены эти зависимости для выбранных крайних из рабочего диапазона частот вращения n=nном и n=0,6nном. По этим зависимостям рассчитывают зависимости КПД от параметров фазового управления для разных частот вращения из заданного диапазона. На фиг. 4 и 5 приведены зависимости КПД для выбранных крайних из рабочего диапазона частот вращения n=nном и n=0,6nном (точками отмечены максимальные значения КПД). Затем по найденным оптимальным парам параметров управления αвкл_ηmax, αимп_ηmax, которые соответствуют максимальным значениям КПД, находят соответствующие траектории изменения момента (на фиг. 2 и 3 отмечены точками). Данные получают при следующих ограничениях:
- для независимой переменной частоты вращения n:
0,6nном ≤ n ≤ nном - типовое ограничение для насосов и вентиляторов;
- для параметров фазового управления:
0 ≤ αвкл ≤ -90 эл. град.; 0 ≤ αимп ≤ 180 эл. град.
Напряжение на шине постоянного тока - величина постоянная в пределах допуска. Соотношения между значениями длительности импульса αимп1<αимп2<αимп3<αимп4<αимп5<αимп6<αимп7<αимп8.
Аналогичные зависимости определяются для других значений частоты вращения из заданного диапазона. Полученную информацию затем представляют в графическом виде (фиг.6 и 7) или в виде таблиц параметров фазового управления αвкл_ηmax(М, n) и αимп_ηmax(М,n) и используют в алгоритмах управления ВИРД с максимальной энергоэффективностью.
Соотношение между частотами вращения n1=nном>n2>n3>n4.
Таким способом достигается регулирование вращающего момента с максимальной энергоэффективностью при использовании взаимосвязанных оптимальных параметров фазового управления αвкл_ηmax, αимп_ηmax и αп_ηmax. т.е. функция вращающего момента является одномерной относительно тройки оптимальных значений управляющих параметров.
Рекомендуемой областью применения являются регулируемые электропривода с нагрузкой, имеющей «вентиляторную» характеристику, у которой при уменьшении частоты вращения снижается момент нагрузки, - это насосы, вентиляторы и дымососы, которые в зависимости от назначения могут работать круглосуточно. В этом случае энергоэффективность их работы является приоритетной задачей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| СОВМЕЩЕННЫЙ ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2309517C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| Вентильный индукторный двигатель с самоподмагничиванием | 2015 |
|
RU2618215C2 |
| Способ бездатчикового управления линейным возвратно-поступательным вентильно-индукторным парнофазным генератором | 2016 |
|
RU2658654C2 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКООБОРОТНОЙ ИНДУКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ | 2020 |
|
RU2744656C1 |
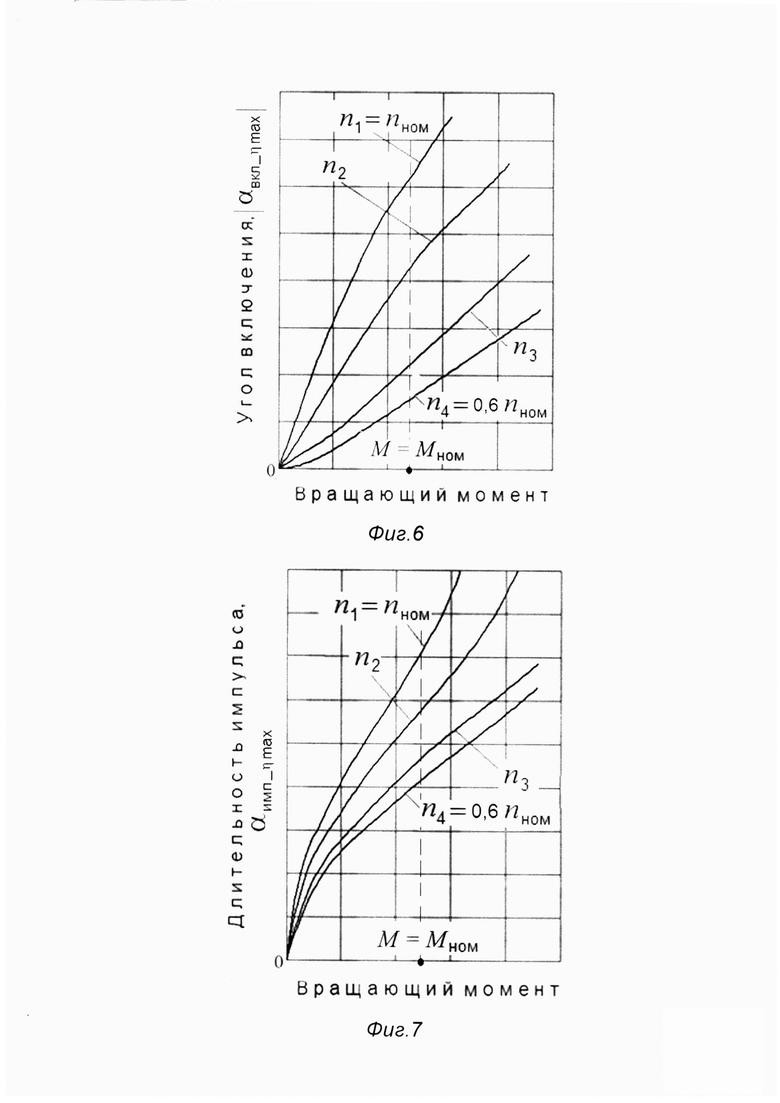
Изобретение относится к области электротехники, а именно к способам управления вентильно-индукторным реактивным двигателем (ВИРД). Рекомендуется для увеличения энергоэффективности индукторных двигателей за счет оптимизации управления при повышенных требованиях к энергосбережению в регулируемых вентильно-индукторных реактивных электроприводах насосов и вентиляторов в жилищно-коммунальном хозяйстве и различных областях промышленности. Техническим результатом данного изобретения является повышение коэффициента полезного действия (КПД) уже изготовленных ВИРД с помощью оптимизации и упрощения алгоритмов управления ими. В способе управления для сокращения количества варьируемых параметров управления αвкл, αимп и αп (см. Фиг. 1) устанавливается взаимосвязь между ними, при которой обеспечивается максимум КПД двигателя, что позволяет перейти от трехмерной зависимости функции вращающего момента от переменных параметров управления к одномерной. Установление такой взаимосвязи для изготовленного двигателя может быть реализовано на основе проведения серии экспериментов с использованием датчика момента при разных нагрузке и частотах вращения. По полученным результатам затем определяют двухмерные зависимости αвкл_ηmax(М, n) и αимп_ηmax(М, n), которые используются для вычисления таблиц оптимальных параметров фазового управления с последующей прошивкой их значений в контроллер системы управления инвертора напряжения, питающего ВИРД (см. Фиг. 6 и 7). 1 з. п. ф-лы, 7 ил.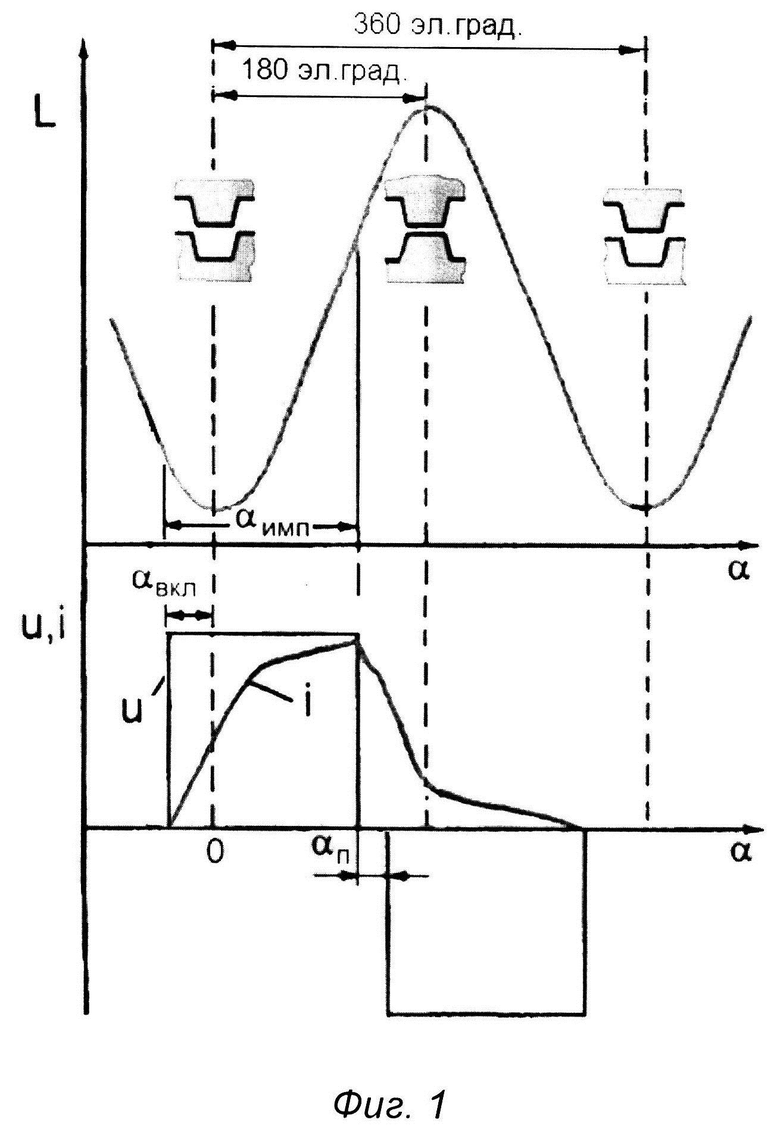
1. Способ управления вентильно-индукторным реактивным двигателем, имеющим зубчатый безобмоточный ротор и зубчатый статор, на котором расположены катушечные фазные обмотки, каждую из которых запитывают по сигналам датчика положения ротора однополярными импульсами тока от полумостового инвертора напряжения, заключающийся в том, что для изготовленного двигателя сначала экспериментально снимают двухмерные зависимости вращающего момента от частоты вращения и параметров фазового управления: угла включения αвкл и длительности импульса напряжения αимп, затем по этим зависимостям рассчитывают аналогичные зависимости коэффициента полезного действия η, и определяют оптимальную тройку взаимосвязанных значений параметров управления αвкл_ηmax, αимп_ηmax, и αп_ηmax, при которых функция η(αвкл, αимп) достигает максимального значения, при этом длительность паузы импульса напряжения определяется по формуле 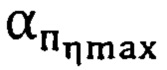 =180 - αимп_ηmax.
=180 - αимп_ηmax.
2. Способ управления по п. 1, характеризующийся тем, что с помощью экспериментально снятых двухмерных зависимостей вращающего момента М(αвкл, n) и М(αимп, n) и найденных оптимальных пар параметров управления αвкл_ηmax и  , при которых достигается максимум КПД, определяют для разных частот вращения соответствующие траектории изменения момента, а затем формируют двухмерные зависимости оптимальных параметров фазового управления от вращающего момента и частоты вращения
, при которых достигается максимум КПД, определяют для разных частот вращения соответствующие траектории изменения момента, а затем формируют двухмерные зависимости оптимальных параметров фазового управления от вращающего момента и частоты вращения  и
и  обеспечивающие индивидуальное управление изготовленным индукторным двигателем с максимальной энергоэффективностью.
обеспечивающие индивидуальное управление изготовленным индукторным двигателем с максимальной энергоэффективностью.
| Способ управления вентильно-индукторным электрическим двигателем | 2019 |
|
RU2716129C1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНДУКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ СО СТАРТОВЫМИ ПОЛЮСАМИ (ВАРИАНТЫ) | 1994 |
|
RU2091977C1 |
| KR 20020084704 A, 11.11.2002 | |||
| US 6288514 B1, 11.09.2001 | |||
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |

