Изобретение относится к устройствам контроля технического состояния и функционирования транспортных средств.
Дорожное движение в настоящее время следует рассматривать как одну из самых сложных составляющих социально-экономического развития государств. Безопасность на дороге играет все большую роль, так как поток машин во всех странах стремительно уплотняется. Сегодня аварии - одна из главных причин смертности и инвалидности людей в мире.
Концепция управления транспортом, основанная на применении средств механизации и автоматизированного управления, исчерпала себя. Инновационный путь развития требует создания новых методов эксплуатации, управления и контроля. Современным подходом реструктуризации и модернизации автомобильных дорог должны стать качественно новые подходы, одним из которых является применение интеллектуальных транспортных систем (ИТС). Применение ИТС во многих странах диктуется современным техническим развитием общества, уровнем технологий и требованием качественного развития транспортных систем.
Из уровня техники известно устройство контроля параметров движения транспортного средства (патент RU №2434291, опубл. 20.11.2017).Аппаратура устройства, расположенная на транспортном средстве, содержит аппарат магнитной записи, первый, второй и третий приводы механизма транспортирования носителя магнитной записи, универсальную магнитную головку, стирающую магнитную головку, генератор стирания, блок управления, реле времени, колесо транспортного средства, первый и второй переключатели, блок воспроизведения, первый и второй распределительные блоки, датчик метокносителя, источник сигналов записи, датчики состояния тормозной системы, приборов сигнализации, фар, датчик усилия сжатия водителем рулевого колеса, задающий генератор, первый и второй фазовые манипуляторы, частотный манипулятор, амплитудный модулятор, усилитель мощности, передающую антенну, перемножитель, узкополосный фильтр, приемную антенну, приемник GPS-сигналов и компьютер.
В качестве недостатков известного изобретения следует признать узкий диапазон функциональных возможностей устройства.
Известен способ дистанционной диагностики механического транспортного средства (патент RU №2615806, опубл. 11.04.2017), заключающийся в следующем. Для диагностирования выделяют подсистему механического транспортного средства и ее эксплуатационные характеристики. От механического транспортного средства в диагностический комплекс передают сигналы, отображающие регистрационные данные и параметры. В диагностическом комплексе идентифицируют принятые данные, выявляют неисправности и скрытые зарождающиеся дефекты. Вычисляют с помощью метода факторного анализа для выделенной подсистемы значение интегрального показателя. Сохраняют значения эксплуатационных характеристик и вычисленных интегральных показателей в соответствующих накопителях. Сравнивают через равные промежутки времени скорость изменения величины интегрального показателя с начальной скоростью в процессе эксплуатации, причем вывод о появлении скрытых зарождающихся дефектов, приводящих к предотказному состоянию, делают при увеличении скорости изменения более чем в три раза. Передают по телекоммуникационным средствам связи на механическое транспортное средство сигналы с оценкой технического состояния выделенной подсистемы и рекомендации по ремонту.
Основным недостатком данного способа является ограниченность контролируемых параметров.
Известна система для контроля транспортных средств и передвижения персонала (патент RU №2442220, опубл. 10.02.2012), включающая блок сбора и передачи информации об объекте контроля. Блок сбора и передачи информации содержит объединенные двунаправленной шиной микропроцессора устройство связи с подключенными к нему блоками аудиоинтерфейса, приемник системы местоопределения, блок сопряжения сдатчиками первичной информации, блок обработки аналоговых сигналов, блок сопряжения с исполнительными устройствами, порт сопряжения с персональным компьютером, блок автономного питания. Система дополнительно включает в себя коммуникационный сервер, множество радиомодемов, сервер хранения и архивирования данных, картографический сервер, множество персональных компьютеров для ввода и вывода информации, сеть передачи данных, серверы корпоративных информационных систем. Блок сбора и передачи информации об объекте контроля связан с коммуникационным сервером посредством радиосети, сети Интернет и радиомодемов. Коммуникационный сервер связан посредством сети передачи данных с сервером хранения и архивирования данных, серверами корпоративных информационных систем и множеством персональных компьютеров. Множество персональных компьютеров связаны с картографическим сервером и серверами корпоративных информационных систем. Все серверы и множество персональных компьютеров связаны сетью передачи данных.
Недостатками известной системы являются ее многокомпонентность и массогабаритные характеристики.
Также известно устройство для контроля управления транспортным средством (патент RU №2664094, опубл. 15.08.2017), содержащее выполненные с возможностью установки на транспортном средстве и соединения с датчиками скорости, продольного и бокового ускорений и расхода топлива, устройство для обработки информации, связанное с ним устройство для отображения информации с дисплеем и средство управления. Устройство для обработки информации выполнено с возможностью сравнения измеренных значений максимальной скорости, среднего квадратичного отклонения продольного и бокового ускорений от средней величины с вычисляемыми установленной программой оптимальными значениями этих показателей и определение по отклонениям этих показателей от оптимальных значений коэффициентов опасности управления и выведением на дисплей наибольшего из коэффициентов опасности управления.
Данное устройство характеризуется недостатком - ограниченные возможности в отношении повышения качества управления транспортным средством при выполнении перевозок.
Наиболее близким аналогом разработанной системы является интеллектуальная транспортная система (ИТС) и способ ее использования (патент RU №2533645, опубл. 20.11.2014). Интеллектуальную транспортную систему устанавливают в комплексе на автотранспортном средстве, полностью адаптируют к его электрической системе, используют непрерывное автоматическом и ручном режиме, совместно со средствами сотовой связи, Интернетом и навигационными спутниковыми системами, и осуществляют видеонаблюдение и контроль над автотранспортным средством на расстоянии с помощью сотового аппарата, поддерживающего технологию 3-G. Интеллектуальная транспортная система состоит из следующих основных, взаимосвязанных между собой конструктивных элементов: системы видеонаблюдения, видеорегистратора, сенсорного дисплея, процессорной платы с SIM-модулем, приемопередатчика, аварийного блока, с модулем противоугонной системы, бесперебойного источника питания, мультимедийного устройства, измерителя расстояния, превентивной системы безопасности. Достигается Обеспечение комплексной защиты автотранспортного средства, водителя, пассажиров, пешеходов и создания благоприятных условий дорожного движения в целом.
Недостатком данного изобретения является недостаточная автономность ИТС.
Технической проблемой, решаемой с использованием разработанной телеметрической системы, является повышение эффективности контроля технического состояния транспортных средств.
Технический результат заключается в том, что разработана телеметрическая система контроля технического состояния транспортных средств, позволяющая свести к минимуму человеческий фактор в работе техники и минимизировать риск для человека и транспортного средства во время работы.
Для достижения указанного технического результата предложено использовать разработанную телеметрическую систему контроля технического состояния транспортных средств. Разработанная телеметрическая система контроля технического состояния транспортного средства, содержащая синтезатор питания, модуль навигации, модуль связи и.центральный микропроцессорный модуль, отличающаяся тем, что она дополнительно содержит аналого-цифровой преобразователь, информационные входы/выходы которого соединены с установленными на транспортном средстве датчиками, а именно датчиком давления масла, импульсными датчиками оборотов и расхода топлива, термометрами, термопарами, при этом входы/выходы синтезатора питания соединены с выходами/входами центрального микропроцессорного модуля, а также выходами/входами модуля навигации и выходами/входами аналого-цифрового преобразователя, входы/выходы которого соединены с выходами/входами центрального микропроцессорного модуля, который дополнительно соединен с входами/выходами модуля навигации, при этом модуль навигации Входами/выходами соединен с выходами/входами модуля связи.
В качестве синтезатора питания может быть использован импульсный преобразователь напряжения с КПД не менее 90% и выходными напряжениями 3,3 и 5,0 В, в качестве модуля навигации - приемник GPS/GLONASS, а в качестве модуля связи - GSM/3G модем.
Телеметрическая система может дополнительно содержать модуль, подключенный к синтезатору питания и собирающий данные с термопар, обрабатывающий их и передающий информацию на центральный микропроцессорный модуль.
В некоторых вариантах реализации телеметрическая система выполнена с возможностью подключения дополнительных модулей.
Телеметрическая система предназначена для: (1) сбора данных о работе двигателя и транспортного средства (ТС) в целом при помощи аналоговых и цифровых датчиков, а также с использованием спутниковых систем GPS/ГЛОНАСС; (2) передачи всей собранной и накопленной информации на сервер для отображения текущего состояния ТС и истории эксплуатации ТС за весь период работы.
Функционально телеметрическая система включает следующие компоненты:
1. Синтезатор питания (силовой блок, обеспечивающий преобразование входного напряжения в напряжения, необходимые для питания самого устройства, датчиков, зарядки резервной батареи). Представляет собой импульсный преобразователь напряжения с КПД не менее 90% и выходными напряжениями 3,3 и 5,0 В. Напряжение питания резервной батареи передается на центральный контроллер через отдельный вход аналого-цифрового преобразователя (АЦП).
2. В качестве модуля навигации (приемник GPS/GLONASS) может быть использован модуль uBlox NEO6. Экспериментально замеренное потребление по линии 3v3 не превышает 80 mA на старте.
3. Модуль связи (GSM/3G модем). В телеметрической системе могут быть использованы модули SIM800 (4-диапазонный GSM/GPRS), AIThinker А6 (4-диапазонный GSM/GPRS с поддержкой голосовых вызовов), Huawei El550 (GSM/GPRS/3G). Экспериментально замеренное энергопотребление составляет до 700 mA по линии 3v3 в режиме передачи. Использование модуля связи в режиме автономного питания не рекомендуется в связи с высоким энергопотреблением.
4. Центральный микропроцессорный модуль обеспечивает сбор, первичную обработку и отправку телеметрической информации. Модуль выполнен в герметичном металлическом корпусе с пыле- и влагозащитой. На внешнем металлическом корпусе имеются крепления для установки блока на вертикальную или горизонтальную поверхность. Внутренние элементы (платы, контакты, различные соединения и т.д.) закрыты в пластиковый корпус и жестко закреплены на металлическом корпусе, что создает дополнительную защиту от внешних факторов, в том числе от механических повреждений платы и контактов. Центральный микропроцессорный модуль состоит из двух основных плат - главная управляющая схема и модуль обработки данных для вывода на дисплей. Замеренное энергопотребление в среднем составляет порядка 80 mA по линии 3v3 в обычном режиме работы и менее 1 mA в дежурном режиме при аварийном питании.
5. Аналого-цифровой преобразователь (АЦП) собирает данные с термопар, обрабатывает и передает данные на центральный блок либо самостоятельно - на сервер (зависит от настройки и конфигурации).Внутри данного модуля жестко закреплена одна плата для подключения к ней до 16 термопар и интерфейсом подключения к центральному модулю.
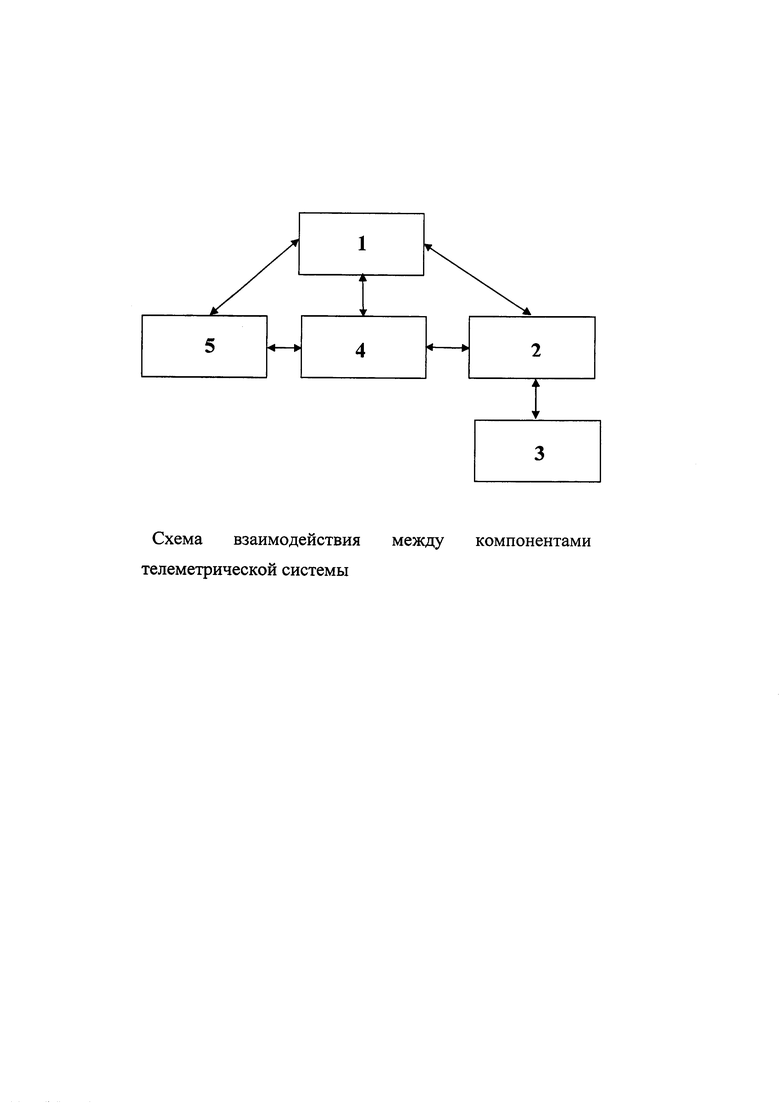
6. Указанные элементы взаимодействуют между собой следующим образом. Входы/выходы синтезатора питания соединены с выходами/входами центрального микропроцессорного модуля, а также выходами/входами модуля навигации и выходами/входами аналого-цифрового преобразователя, входы/выходы которого соединены с выходами/входами центрального микропроцессорного модуля, который дополнительно соединен с входами/выходами модуля навигации, при этом модуль навигации входами/выходами соединен с выходами/входами модуля связи.
Схема взаимодействия между компонентами телеметрической системы представлена на рисунке.
Устройство телеметрической системы является расширяемым за счет модульности и имеет возможность подключения дополнительных модулей.
Базовое описание телеметрической системы и взаимодействующих с ней элементов транспортного средства:
1) Аппаратная часть.
1.1) MicrocontrollerUnit (MCU).
Базовый блок проектируемого устройства, исходя из определенных к нему требований, реализуется на микроконтроллере производства ST Microelectronics STM32F103. Данный контроллер построен на архитектуре ARM Cortex-М3, обладает богатым набором периферии, достаточными аппаратными ресурсами, низкой ценой, широко распространен и работает в расширенном температурном диапазоне.
1.2) Навигация.
В качестве навигационного модуля ГЛОНАСС/GPS для максимальной гибкости выбран модуль, поддерживающий стандартный протокол обмена NMEA и работающий по стандартному интерфейсу UART. В отличие от реализаций, работающих с закрытыми протоколами, подобная реализация выступает в роли «защиты инвестиций», сокращая затраты на замену приемника, если потребуется поддержка дополнительных навигационных систем (GALILEO/BEIDU). Базовый блок в качестве приемника использует широко распространенный и хорошо зарекомендовавший себя модуль U-Blox NEO-6, способный работать в требуемом диапазоне температур.
1.3) Связь.
В качестве модуля связи GSM/GPRS используется модуль, подключаемый к стандартным интерфейсам UART контроллера, поддерживающий стандартизованный набор AT команд для управления и имеющий встроенный IP стек. Исходя из требований к надежности и электропитанию, для базового модуля выбор сделан в пользу зарекомендовавшего себя модуля SimCom SIM800, широко используемого во встраиваемой технике, имеющего низкую цену и широкий диапазон рабочих температур.
1.4) Питание.
Питание модуля осуществляется от бортовой сети автомобиля с напряжением 12-24 В. Основной LM2590, выдающий 5 В с током до 2 А для питания датчиков, дисплея и индикаторов и RT 8183, выдающий 3В3 для питания MCU.
1.5) Дисплей.
В устройстве используется промышленный дисплей на контроллере ST7920.
1.6) Датчики.
Датчики обслуживаются контроллерами периферии MCU и подключаются, соответственно, к портам ввода вывода контроллера. Интерфейс подключения зависит от типа датчика.
Штатные датчики имеют аналоговый выход с напряжением 0-30 В и подключаются к портам АЦП контроллера через делитель 1:10 для защиты порта от перегрузок. Напряжение, замеренное АЦП контроллера, относится к калибровочным таблицам датчика как 1:10, этот коэффициент можно либо 1аранее указать в коде программы, либо применить на сервере заказчика.
Датчик давления масла (OI001NWA), результатом работы которого является изменение сопротивления, подключается по мостовой схеме к порту АЦП контроллера. Результат измерений соотносится с эталонной таблицей как 1:1.
Импульсные датчики оборотов двигателя (Cummins 034572) и расхода топлива (DFM 500 DK) подключаются к таймерам контроллера для аппаратного подсчета количества импульсов с целью минимизации использования вычислительных ресурсов контроллера. Также наличие импульсов на датчике оборотов дает основание считать, что двигатель заведен, и используется для подсчета моточасов двигателя.
Термометры. Для контроля собственной температуры используется встроенный в MCU термометр. Контроль собственной температуры позволит при достижении критических значений сигнализировать об аварийной ситуации и перевести устройство в дежурный режим для предотвращения повреждения устройства. Для контроля температуры на двигателе используются распространенные 1-wire устройства ds18b20 с выделенным питанием. К MCU весь комплекс устройств 1-wire подключается к порту USART, используя референсную схему подключения от dallassemiconductor.
Высокотемпературные термометры представляют собой термопары, подключаемые к аналоговым портам контроллера.
1.7) Постоянная память.
Для хранения настроек и телеметрической информации используется постоянная память на основе SD карт, подключаемых к контроллеру, карты имеют стандартную файловую систему FAT, что позволит читать такие карты без использования специального оборудования.
1.8) Аварийный режим.
В случае возникновения нештатной ситуации (закритические значения температуры, пропадание основного питания) устройство переходит в аварийный режим.
При переходе в аварийный режим выполняются следующие действия:
- Все данные последних замеров записываются в постоянную память.
- На сервер телеметрии посылается тревожный сигнал, с указанием причины тревоги.
- Вся периферия контроллера отключается.
- В резервную память контроллера записывается флаг аварийного события
- Взводится таймер на пробуждение устройства.
- Устройство переводится в спящий режим.
- По наступлению события таймера устройство выходит из спящего режима, проводит проверку, сохранилась ли нештатная ситуация. Если ситуация сохраняется, устройство переходит к пункту 4.
- Если аварийная ситуация исчезла - устройство отправляет сигнал серверу телеметрии и переходит в штатный режим работы.
2) Программное обеспечение.
Программное обеспечение телеметрической системы обеспечивает считывание показаний датчиков, реагирование на изменение режимов работы, передачу показаний датчиков на сервер заказчика.
2.1) Операционная система.
Задачи по управлению ресурсами возлагаются на операционную систему FreeRTOS. FreeRTOS является свободной операционной системой жесткого реального времени, поддерживает как кооперативную, так и вытесняющую многозадачность и обеспечивает переключение контекста выполнения за заранее известное время.
2.2) Базовая программа.
Базовая программа устройства - это задачи FreeRTOS, разделенные по приоритетам.
Обработка импульсных датчиков выполняется в прерывании, контроль питания также привязан к прерыванию, остальные датчики опрашиваются по таймеру.
Передача телеметрической информации на сервер заказчика производится или каждые N минут (секунд) или каждые N метров, в зависимости от настроек. Каждый пакет информации перед передачей записывается в постоянную память устройства, что обеспечивает функционал «черного ящика» и даже в случае неуверенной связи позволит предотвратить потерю важной телеметрической информации.
Основные параметры телеметрической системы:
а) Сбор данных с аналоговых каналов - не менее 8 каналов.
Аналоговые порты представляют собой входы АЦП, подключенные через делитель напряжения 1:15, что позволяет измерять постоянное напряжение на входе АЦП в диапазоне 0-45 В с разрешением не менее 12 бит (~0,01 В). Скорость опроса - не менее 10000 раз в секунду.
b) Сбор данных с дискретных каналов - не менее 8 каналов.
Дискретный канал представляет собой порт, читающий значения
«включено» или «выключено». В его состав входят концевые выключатели, герконы, разнообразные датчики открытия/закрытия, датчики удара. Скорость опроса - не менее 10000 раз в секунду.
c) Наличие дискретных управляющих портов - не менее 8 портов.
Дискретный управляющий порт позволяет подавать управляющее напряжение на подключенное устройство. В его состав входят светодиод, реле, вентилятор, насос. Прямая нагрузочная способность составляет 20 mA на порт. Для подключения сильноточной нагрузки необходимо использовать силовые ключи. Скорость переключения - не менее 10000 раз в секунду.
d) Сбор данных с 1-wire датчиков.
Поддержка стандартных 1-wire устройств, как с фантомным, так и с выделенным питанием.
e) Поддержка шины CAN.
Возможность подключиться к сети CAN, читать или писать сообщения сети в случае, если известен протокол обмена.
f) Поддержка подключения внешних устройств по протоколу RS485.
Поддержка стандарта RS485 позволяет подключаться к устройствам с Интерфейсом RS485, читать состояние или управлять данными устройствами, если известен протокол.
g) Поддержка подключения по протоколу RS232.
Поддержка стандарта RS232 позволяет подключаться к устройствам с интерфейсом RS232.
h) Поддержка USB-HID.
Позволяет подключаться к ПК для диагностики, конфигурирования или обновления прошивки.
i) Поддержка приемников навигационных систем GPS/ГЛОНАСС.
Для сопряжения с приемником используется стандартный USART интерфейс и стандартный протокол NMEA. Схемотехника устройства подразумевает подключение внешней активной антенны для улучшения качества приема, если чувствительности встроенной антенны недостаточно.
j) Поддержка передачи данных через GPRS каналы сотовых операторов.
Для сопряжения с модемом используется стандартный интерфейс USART и базовое подмножество АТ-протокола, поддерживаемое всеми доступными на рынке GSM модемами. На программном уровне устройство поддерживает отправку CMC, что можно использовать, например, для передачи экстренных сообщений, если не доступен сервер телеметрии.
k) Поддержка подключения графического дисплея.
Позволяет выводить телеметрическую информацию или сообщения (CMC или сервера телеметрии) на внешний дисплей.
1) Работа в расширенном температурном диапазоне.
Питание блока телеметрии осуществляется от бортовой сети транспортного средства с напряжением 6-40 В постоянного тока. Устройство Предусматривает аварийное автономное питание, обеспечивающее ход часов реального времени устройства и сохранение необходимых телеметрических данных до появления внешнего питания. Полнофункциональная работа от резервного питания не предусмотрена.
Общий алгоритм работы телеметрической системы состоит из следующих этапов:
1. Инициализация (включение/перезагрузка):
1.1. Чтение конфигурации из энергонезависимой памяти (набор подключенных датчиков, параметры удаленных серверов, параметры передачи, граничные/аварийные условия показаний).
1.2. Регистрация на сервере телеметрии.
1.3. Переход в рабочий цикл.
2. Рабочий цикл:
2.1. Опрос датчиков - в три раза чаще, чем частота, заданная в конфигурации. Из трех измерений берется среднее для фильтрации шума; по умолчанию принята 1 секунда в конфигурации, значит, опрос производится каждые 0,3 с.
2.2. Если данные не выходят за граничные условия, и не наступило время передачи (берется из конфигурации; доступно 2 варианта: раз в N секунд или раз в N метров), данные сохраняются в буфере для отправки.
2.3. Если измеренные данные выходят за граничные условия, данные передаются немедленно.
2.4. Если наступило событие (время или пройденный путь) передачи, данные передаются, буфер отправки очищается, данные переносятся в энергонезависимую память (черный ящик).
2.5. Пропадание питания в процессе работы приводит к генерации прерывания контроллера, в обработчике прерывания выполняются следующие действия:
- немедленная передача на сервер телеметрии сигнала о пропадании питания;
- сохранение буфера последних значений телеметрии в энергонезависимую память;
- отключение питания периферических устройств;
- перевод микроконтроллера в режим сна, в ожидании внешнего питания.
В рабочем цикле обрабатываются такие внешние события, как прием GMC и сообщения от сервера телеметрии.
Телеметрическая система предназначена для установки на транспортные средства: автомобили, железнодорожный транспорт, водный транспорт и др.
Использование телеметрической системы позволит обеспечить полную автономность в контроле технического состояния транспортных средств, не требующую вмешательства человека в работу системы. Контроль за функционированием телеметрической системы возможно осуществлять удаленно с помощью любых устройств (компьютеры, смартфоны). Таким образом, можно свести к минимуму человеческий фактор в работе техники и минимизировать риск для человека и транспорта во время работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоугонная система оповещения | 2017 |
|
RU2685945C2 |
| Аппаратный комплекс телеметрии с высокой степенью автономности для сбора и передачи потоковых и телеметрических данных посредством самоорганизующихся беспроводных сетей, включающих спутниковый сегмент | 2022 |
|
RU2788302C1 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| УСТРОЙСТВО ДЛЯ УДАЛЕННОГО МОНИТОРИНГА И АНАЛИЗА РАБОТЫ ТЕХНИЧЕСКИХ СРЕДСТВ ПЕРЕДВИЖНОГО ВЫСТАВОЧНО-ЛЕКЦИОННОГО КОМПЛЕКСА | 2013 |
|
RU2554524C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| Станция управления насосной установкой нефтедобывающей скважины (варианты) | 2017 |
|
RU2651651C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКАЛИЗАЦИИ ПОВРЕЖДЕННОГО УЧАСТКА ВОЗДУШНОЙ ИЛИ КАБЕЛЬНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2021 |
|
RU2775199C1 |
Изобретение относится к устройствам контроля. Телеметрическая система контроля технического состояния транспортного средства содержит синтезатор питания, модуль навигации, модуль связи и центральный микропроцессорный модуль. Дополнительно содержится аналого-цифровой преобразователь, соединенный с установленными на транспортном средстве датчиками давления масла, импульсными датчиками оборотов и расхода топлива, термометрами и термопарами. Синтезатор питания соединен с центральным микропроцессорным модулем, а также с модулем навигации и аналого-цифровым преобразователем, который соединен с центральным микропроцессорным модулем, который дополнительно соединен с модулем навигации. Модуль навигации соединен с модулем связи. Повышается эффективность контроля. 3 з.п. ф-лы, 1 ил.
1. Телеметрическая система контроля технического состояния транспортного средства, содержащая синтезатор питания, модуль навигации, модуль связи и центральный микропроцессорный модуль, отличающаяся тем, что она дополнительно содержит аналого-цифровой преобразователь, информационные входы/выходы которого соединены с установленными на транспортном средстве датчиками, а именно датчиком давления масла, импульсными датчиками оборотов и расхода топлива, термометрами, термопарами, при этом входы/выходы синтезатора питания соединены с выходами/входами центрального микропроцессорного модуля, а также с выходами/входами модуля навигации и с выходами/входами аналого-цифрового преобразователя, входы/выходы которого соединены с выходами/входами центрального микропроцессорного модуля, который дополнительно соединен с входами/выходами модуля навигации, при этом модуль навигации входами/выходами соединен с выходами/входами модуля связи.
2. Телеметрическая система по п. 1, отличающаяся тем, что в качестве синтезатора питания использован импульсный преобразователь напряжения с КПД не менее 90% и выходными напряжениями 3,3 и 5,0 В, в качестве модуля навигации - приемник GPS/GLONASS, а в качестве модуля связи - GSM/3G модем.
3. Телеметрическая система по п. 1, отличающаяся тем, что она дополнительно содержит модуль, подключенный к синтезатору питания и собирающий данные с термопар, обрабатывающий их и передающий информацию на центральный микропроцессорный модуль.
4. Телеметрическая система по п. 1, отличающаяся тем, что она выполнена с возможностью подключения дополнительных модулей.
| JP 2016004470 A, 12.01.2016 | |||
| JP 2002259753 A, 13.09.2002 | |||
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2434291C1 |
| Способ дистанционной диагностики механического транспортного средства | 2015 |
|
RU2615806C1 |

