Изобретение относится к средствам диагностирования с использованием ультразвуковых волн и может использоваться в медицине для обнаружения органических изменений в организме с помощью эхотомографии, в частности, к средствам получения ультразвукового трехмерного изображения с возможной записью, хранением полученной информации для последующего анализа и дистанционной передачи.
Известен ультразвуковой томограф, представленный в п. США №5305752 по кл. А61В 8/00, 1994 г.
Известный томограф содержит последовательно соединенные антенную решетку из приемоизлучающих пьезопреобразователей, которую размещают в ванне с иммерсионной жидкостью, многоканальные приемопередающий блок и аналого-цифровой преобразователь, блок усиления, блок преобразования и отображения на базе цифрового компьютера, программированный на выполнение преобразования Фурье. При этом антенная решетка состоит из большого количества пьезопреобразователей, соединенных с электронным блоком через многоступенчатый коммутатор, что существенно усложняет всю схему и вносит дополнительные помехи.
Известен ультразвуковой томограф, представленный в з. США №2003220569 А1, по кл. А61В 8/00, 2003.
Известный томограф включает приемно-излучающее устройство с расположенными по окружности приемоизлучающими электроакустическими преобразователями, преобразующими электрическую энергию в акустическую, к входу которого подключен канал формирования излучаемых сигналов, а к выходу - канал анализа принятых сигналов. При этом приемоизлучающее устройство состоит из большого количества преобразователей, соединенных с электронным блоком через многоступенчатый коммутатор, что существенно усложняет всю схему и вносит дополнительные помехи.
Подобный томограф представлен также в патенте РФ №2526424 «Ультразвуковой томограф». По кл. А61В 8/13, 8/08, з. 08.08.2012 г., оп. 20.08.2014 г.
Известный томограф характеризуется следующей формулой.
1. Ультразвуковой томограф, включающий приемно-излучающее устройство с расположенными по окружности приемоизлучающими электроакустическими преобразователями, к входу которого подключен канал формирования излучаемых сигналов, а к выходу - канал анализа принятых сигналов, характеризующийся тем, что приемно-излучающее устройство содержит, по меньшей мере, два излучающих плоских электроакустических преобразователя с широкой полосой излучаемых кодированных ультразвуковых сигналов и, по меньшей мере, один приемный плоский электроакустический преобразователь с широкой полосой принимаемого сигнала, причем высота рабочей поверхности плоских электроакустических преобразователей составляет 15÷20 мм, а ее ширина составляет 5÷7 см, при этом рабочая поверхность плоских электроакустических преобразователей расположена в касательной плоскости к окружности, внутри которой находится томографируемый орган, и ортогональна плоскости этой окружности, а диаметр этой окружности в 1,5÷2,0 раза больше ширины рабочей поверхности плоских электроакустических преобразователей, при этом угол между акустическими осями, перпендикулярными рабочей поверхности плоских электроакустических преобразователей для каждой пары соседних плоских электроакустических преобразователей, лежит в пределах от 30° до 90°.
2. Ультразвуковой томограф по п. 1, характеризующийся тем, что приемно-излучающее устройство дополнительно содержит, по меньшей мере, один излучающий плоский электроакустический преобразователь монохроматического или широкополосного ультразвукового сигнала.
3. Ультразвуковой томограф по п. 1 или 2, характеризующийся тем, что канал формирования излучаемых сигналов содержит последовательно включенные блок цифровой генерации излучаемых сигналов, цифроаналоговый преобразователь, блок фильтров излучаемых сигналов, усилители излучаемых сигналов, выход которых подключен к излучающим преобразователям приемно-излучающего устройства, а канал анализа принятых сигналов содержит последовательно включенные фильтр принимаемого сигнала, вход которого подключен к приемному плоскому преобразователю, усилитель принимаемого сигнала, аналого-цифровой преобразователь и запоминающее устройство, блок анализа принятого сигнала и томографического отображения, ко второму входу которого подключен выход блока цифровой генерации излучаемых сигналов.
Недостатком является сложность конструкции, обусловленная большим количеством входящих в него узлов и строгими требованиями к размерам плоских электроакустических преобразователей и их взаимного расположения.
Наиболее близким по технической сущности к заявляемому представляется ультразвуковой томограф, описанный в п. РФ №2145797 по кл. А61В 8/08, 8/12, з. 08.08.2012 г, оп. 20.08.2014 г. и выбранный в качестве прототипа.
Известный ультразвуковой томограф содержит последовательно соединенные кольцевую антенную решетку из приемоизлучающих пьезопреобразователей, многоканальный блок приемопередающих устройств с антенным коммутатором, многоканальный аналого-цифровой преобразователь, блок обработки принятых сигналов, блок накопления изображения и блок томографического отображения. При этом томограф дополнительно снабжен поворотным столом с программным управлением, на котором установлена кольцевая антенная решетка, причем последняя выполнена разреженной с неравномерным расположением приемоизлучающих пьезопреобразователей, количество которых меньше числа узлов-шагов сканирования, а приемоизлучающие пьезопреобразователи имеют излучающую поверхность цилиндрической формы с длиной дуги направляющей больше половины длины волны ультразвукового акустического импульса излучения и размещены по узлам кольцевой антенной решетки, номера которых и угловые расстояния удовлетворяют определенным соотношениям. Кроме того, кольцевая антенная решетка для ультразвукового томографа содержит по меньшей мере две группы приемоизлучающих пьезопреобразователей, в одной из которых пьезопреобразователи имеют одинаковый угол наклона относительно плоскости, перпендикулярной оси кольцевой антенной решетки, а пьезопреобразователи в другой группе имеют различные углы наклона, лежащие в некотором диапазоне, например, от -20 до +20°. При этом кольцевая антенная решетка размещена в ванне, наполненной иммерсионной жидкостью и установленной на поворотном столе поворотного устройства с системой управления, включает N=256 равноотстоящих узлов - шагов сканирования и выполнена разреженной с неравномерным расположением 26 приемоизлучающих пьезопреобразователей в узлах кольцевой решетки. При этом размеры приемоизлучающих пьезопреобразователей зависят от длины волны ультразвукового акустического импульса излучения и размещены в узлах кольцевой антенной решетки, номера которых и угловые расстояния при сочетании в различные неповторяющиеся пары должны удовлетворять определенным соотношениям, что существенно усложняет конструкцию томографа и его изготовление.
Кроме того, для снижения количества приемоизлучающих преобразователей данный томограф снабжен поворотным столом с программным управлением, что также усложняет конструкцию и увеличивает массо-габаритные характеристики томографа.
Также при использовании требуется наличие специалиста, который должен проводить ручное ведение ультразвукового датчика вдоль ванн с иммерсионной жидкостью, причем наличие эффекта реверберации при прохождении ультразвукового луча через иммерсионную жидкость ухудшает качество обследования.
Задачей является упрощение конструкции томографа при автоматизации процесса обследования и обеспечении его надлежащего качества.
Поставленная задача решается тем, что в роботизированной системе ультразвукового томографического обследования, содержащей приемоизлучающий узел, размещенный в снабженном системой управления устройстве изменения его положения относительно томографируемого органа пациента, и связанный выходом с блоком обработки принятых сигналов, снабженным блоком накопления изображения и блоком томографического отображения системы управления, СОГЛАСНО ИЗОБРЕТЕНИЮ, в качестве приемоизлучающего узла использован ультразвуковой сканер, а устройство изменения положения приемоизлучающего узла представляет собой расположенную над кушеткой с пациентом и вертикально ориентированную прямоугольную П-образную раму, на верхней перекладине которой на вертикальной штанге размещена с возможностью ее перемещения по перекладине снабженная микроконтроллером каретка, в которой в амортизирующем держателе закреплен датчик ультразвукового сканера с возможностью его поворота на 360 градусов и осуществления качательных движений относительно томографируемого органа пациента, а также с возможностью его вертикального перемещения по вертикальной штанге, нижние концы вертикальных стоек рамы закреплены в двух тележках, установленных с возможностью продольного движения их по расположенным на полу с обеих длинных сторон кушетки направляющим рельсам, блок обработки принятых сигналов, блок накопления изображения и блок томографического отображения выполнены на компьютере, связанном с микроконтроллером каретки и снабженном программой управления через него перемещениями закрепленного в каретке датчика ультразвукового сканера с заданной частотой срезов и направлением сканирования в процессе обследования пациента с возможностью дистанционного контроля по необходимости.
Использование вместо приемо-передающего устройства ультразвукового сканера в совокупности с размещением последнего в устройстве изменения его положения относительно томографируемого органа пациента и обеспечением возможности поворота сканера на 360 градусов и покачивания его относительно томографируемого органа пациента и выполнением системы обработки сигнала на компьютере существенно упрощает конструкцию томографа, его изготовление и эксплуатацию и исключает необходимость ручного ведения датчика вдоль тела пациента. При этом размещение ультразвукового датчика в амортизирующем держателе обеспечивает полноценный контакт с телом пациента, что позволяет обходить неровности, не теряя соприкосновения с телом пациента.
Технический результат - создание достаточно простой роботизированной установки, позволяющей в автоматическом режиме проводить обследование с установленной частотой срезов и направлением сканирования, не требуя ведения датчика вручную, хотя и предусматривающей возможность контроля регулирования работ, в том числе и дистанционно, упрощение конструкции томографа, его изготовления и эксплуатации при обеспечении достаточно высокого качества обследования.
Заявляемая роботизированная система ультразвукового томографического обследования обладает новизной в сравнении с прототипом, отличаясь от него такими существенными признаками как использование в качестве приемо-передающего устройства ультразвукового сканера, выполнение устройства изменения положения ультразвукового сканера относительно томографируемого органа пациента в виде расположенной над кушеткой с пациентом и вертикально ориентированной прямоугольной П-образной рамы, размещение на верхней перекладине на вертикальной штанге с возможностью ее перемещения по перекладине снабженной микроконтроллером каретки, в которой в амортизирующем держателе закреплен датчик ультразвукового сканера с возможностью его поворота на 360 градусов и осуществления качательных движений относительно томографируемого органа пациента, а также с возможностью его вертикального перемещения по вертикальной штанге, закрепление нижних концов вертикальных стоек рамы в двух тележках, установленных с возможностью продольного движения их по расположенным на полу с обеих длинных сторон кушетки направляющим рельсам, выполнение блока обработки принятых сигналов, блока накопления изображения и блока томографического отображения на компьютере, связанном с микроконтроллером каретки и снабженном программой управления через него перемещениями закрепленного в каретке датчика ультразвукового сканера с заданной частотой срезов и направлением сканирования в процессе обследования пациента с возможностью при необходимости дистанционного контроля, обеспечивающими в совокупности достижение заданного результата.
Заявителям неизвестны технические решения, обладающие указанными существенными отличиями, которые обеспечивали бы в совокупности достижение заданного результата, поэтому они считают, что заявляемая система
Заявляемое изобретение может найти широкое применение в медицине для ультразвукового диагностирования и потому соответствует критерию «промышленная применимость».
Изобретение иллюстрируется чертежами, где представлены на:
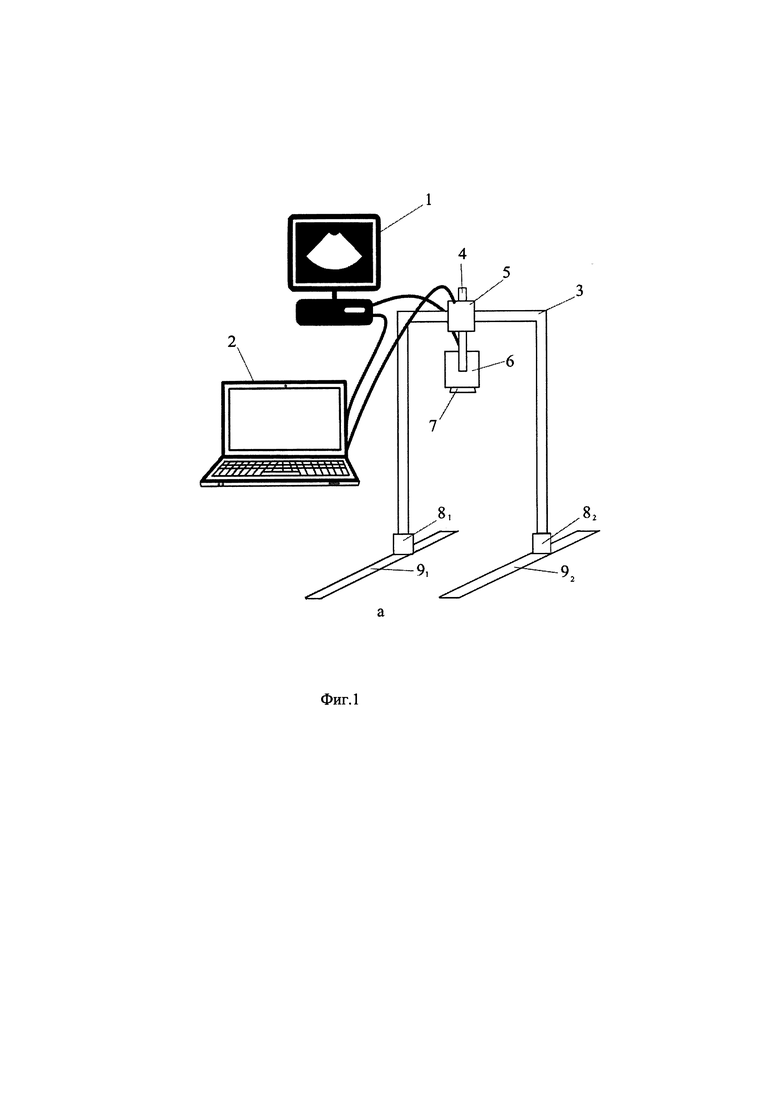
- фиг. 1 - общий вид роботизированной системы ультразвукового томографического обследования спереди;
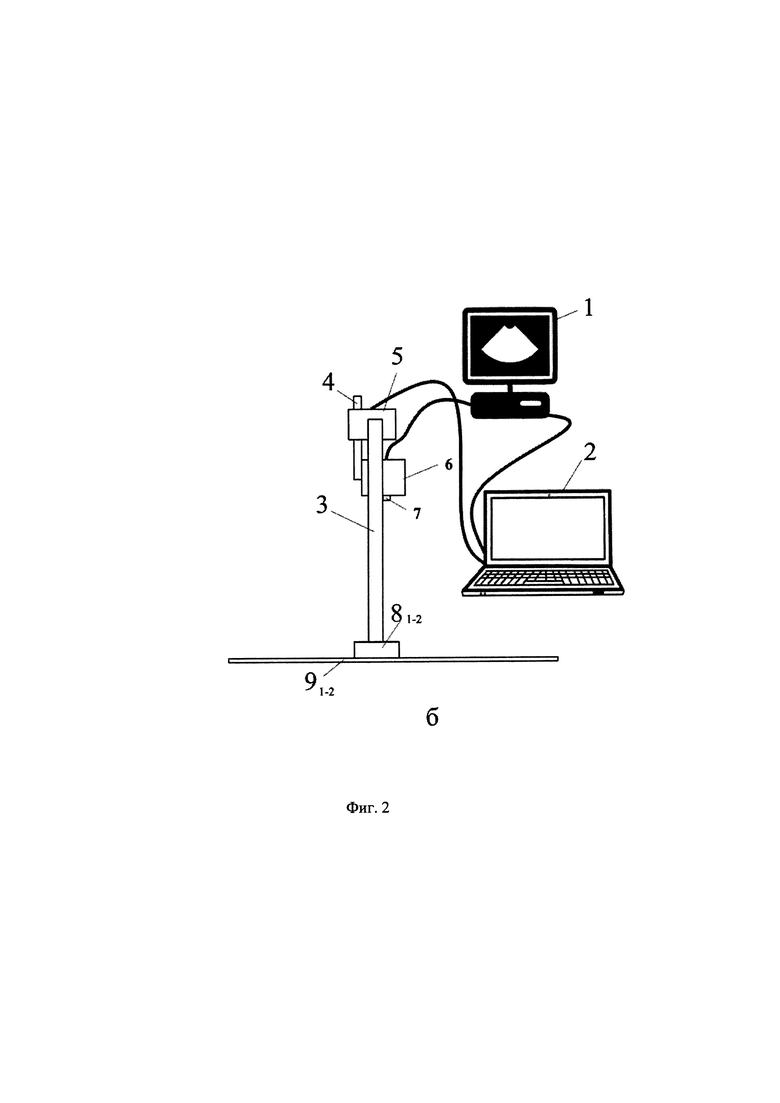
- фиг. 2 - общий вид роботизированной системы ультразвукового томографического обследования сбоку.
Роботизированная система ультразвукового томографического обследования содержит приемоизлучающее устройство, представляющее собой ультразвуковой сканер 1 и компьютер 2, устройство 3 изменения положения ультразвукового сканера в виде вертикально ориентированной прямоугольной П-образной рамы, на верхней перекладине которой на вертикальной штанге 4 размещена с возможностью ее перемещения по перекладине снабженная микроконтроллером 5 каретка, в которой в амортизирующем держателе 6 закреплен датчик ультразвукового сканера 7 с возможностью его поворота на 360 градусов и осуществления качательных движений относительно томографируемого органа пациента, а также с возможностью его вертикального перемещения по штанге 4. Нижние концы вертикальных стоек рамы 3 закреплены в двух тележках 81 и 82, установленных с возможностью продольного движения их по расположенным на полу с обеих длинных сторон кушетки (на чертежах не показана) направляющим рельсам 91 и 92.
Микроконтроллер 5 подключен к компьютеру 2 и управляет передвижением датчика 7. П-образная рама 3 движется по направляющим 91 и 92 вдоль кушетки на перемещающих тележках 81 и 82, а каретка с микроконтроллером 5 движется поперек кушетки. П-образная рама 3 располагается над кушеткой пациента, и высота положения датчика ультразвукового сканера 7 корректируется вертикальной штангой 4. Специалист устанавливает систему над кушеткой пациента, устанавливает держатель 6 так, чтобы датчик 7 касался пациента и запускает на компьютере 2 программу. Через управляющий микроконтроллер 5 компьютер 2 управляет перемещением датчика 7, данные сканирования поступают со сканера на компьютер 2, где по полученным данным выстраивается томографическое отображение, первичный анализ и построение многомерной модели сканируемого органа или всего тела человека. Данный томограф не требует дополнительных навыков и умения от оператора, проводящего начало и пуск работ данной установки, и может использоваться как непосредственно в медицинском учреждении, в месте нахождения врача-специалиста, так и при телемедицинских исследованиях, когда врач-специалист, проводящий окончательный анализ, может находиться далеко от места непосредственного обследования пациента.
В сравнении с прототипом заявляемая роботизированная система ультразвукового томографического обследования является более простой, обеспечивающей автоматизацию обследования при достаточно высоком его качестве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционно-управляемая система ультразвукового обследования пациентов | 2021 |
|
RU2787529C1 |
| Дистанционно-управляемая система обследования пациентов | 2018 |
|
RU2680796C1 |
| УЛЬТРАЗВУКОВОЙ ТОМОГРАФ | 2012 |
|
RU2530659C2 |
| УЛЬТРАЗВУКОВОЙ ТОМОГРАФ | 2012 |
|
RU2526424C2 |
| Амортизирующий фиксатор для датчика ультразвукового сканера | 2018 |
|
RU2677789C1 |
| УЛЬТРАЗВУКОВОЙ ТОМОГРАФ И КОЛЬЦЕВАЯ АНТЕННАЯ РЕШЕТКА ДЛЯ УЛЬТРАЗВУКОВОГО ТОМОГРАФА | 1999 |
|
RU2145797C1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА | 2003 |
|
RU2246261C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2675217C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2675214C1 |
| Способ картографирования с помощью кольцевой антенной решётки | 2019 |
|
RU2728512C1 |
Изобретение относится к медицинской технике, а именно к средствам диагностирования с использованием ультразвуковых волн. Роботизированная система ультразвукового томографического обследования содержит приемоизлучающий узел, размещенный в снабженном системой управления устройстве изменения его положения относительно томографируемого органа пациента и связанный выходом с блоком обработки принятых сигналов, снабженным блоком накопления изображения и блоком томографического отображения системы управления, при этом в качестве приемоизлучающего узла использован ультразвуковой сканер, а устройство изменения положения приемоизлучающего узла представляет собой расположенную над кушеткой с пациентом и вертикально ориентированную прямоугольную П-образную раму, на верхней перекладине которой на вертикальной штанге размещена с возможностью ее перемещения по перекладине снабженная микроконтроллером каретка, в которой в амортизирующем держателе закреплен датчик ультразвукового сканера с возможностью его поворота на 360 градусов и осуществления качательных движений относительно томографируемого органа пациента, а также с возможностью его вертикального перемещения по вертикальной штанге, нижние концы вертикальных стоек рамы закреплены в двух тележках, установленных с возможностью продольного движения их по расположенным на полу с обеих длинных сторон кушетки направляющим рельсам, блок обработки принятых сигналов, блок накопления изображения и блок томографического отображения выполнены на компьютере, связанном с микроконтроллером каретки и выполненным с возможностью управления через него перемещениями закрепленного в каретке датчика ультразвукового сканера с заданной частотой срезов и направлением сканирования в процессе обследования пациента с возможностью дистанционного контроля. Использование изобретения позволяет проводить обследование в автоматическом режиме. 2 ил.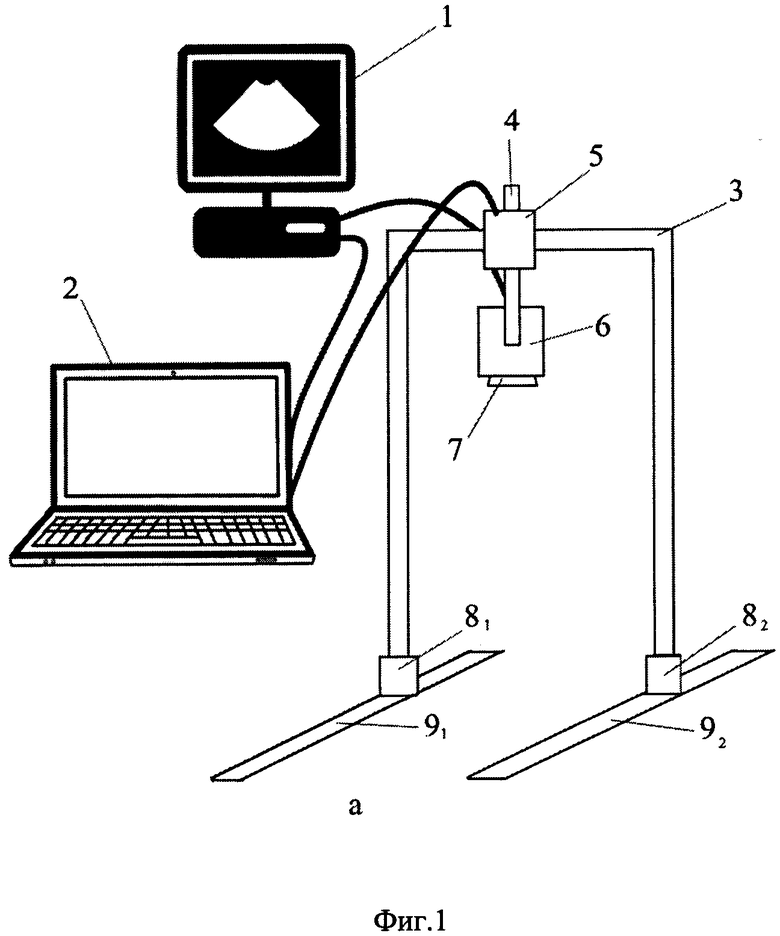
Роботизированная система ультразвукового томографического обследования, содержащая приемоизлучающий узел, размещенный в снабженном системой управления устройстве изменения его положения относительно томографируемого органа пациента и связанный выходом с блоком обработки принятых сигналов, снабженным блоком накопления изображения и блоком томографического отображения системы управления, отличающаяся тем, что в качестве приемоизлучающего узла использован ультразвуковой сканер, а устройство изменения положения приемоизлучающего узла представляет собой расположенную над кушеткой с пациентом и вертикально ориентированную прямоугольную П-образную раму, на верхней перекладине которой на вертикальной штанге размещена с возможностью ее перемещения по перекладине снабженная микроконтроллером каретка, в которой в амортизирующем держателе закреплен датчик ультразвукового сканера с возможностью его поворота на 360 градусов и осуществления качательных движений относительно томографируемого органа пациента, а также с возможностью его вертикального перемещения по вертикальной штанге, нижние концы вертикальных стоек рамы закреплены в двух тележках, установленных с возможностью продольного движения их по расположенным на полу с обеих длинных сторон кушетки направляющим рельсам, блок обработки принятых сигналов, блок накопления изображения и блок томографического отображения выполнены на компьютере, связанном с микроконтроллером каретки и снабженном программой управления через него перемещениями закрепленного в каретке датчика ультразвукового сканера с заданной частотой срезов и направлением сканирования в процессе обследования пациента с возможностью дистанционного контроля по необходимости.
| US 2016209837 A1, 21.07.2016 | |||
| JPH 10277033 A, 20.10.1998 | |||
| US 2019090855 A1, 28.03.2019 | |||
| CN 108542353 A, 18.09.2018 | |||
| УЛЬТРАЗВУКОВОЙ ТОМОГРАФ И КОЛЬЦЕВАЯ АНТЕННАЯ РЕШЕТКА ДЛЯ УЛЬТРАЗВУКОВОГО ТОМОГРАФА | 1999 |
|
RU2145797C1 |
| Yeoun Jae Kim et al | |||
| Development of a control algorithm for the ultrasound scanning robot (NCCUSR) using ultrasound image and force feedback, THE INTERNATIONAL JOURNAL OF MEDICAL ROBOTICS AND COMPUTER | |||

