Изобретение относится к области визуализации внутреннего строения объектов с помощью ультразвуковых волн и может быть использовано в промышленности для контроля дефектов внутри деталей, для дефектоскопии различных материалов, а также в медицине для диагностики внутренних органов.
Известен способ ультразвуковой томографии [Й. Крауткремер, Г. Крауткремер Ультразвуковой контроль материалов: справочное издание. М.: "Металлургия", 1991. - С. 306], в котором для формирования акустического изображения пьезопреобразователями работающими в режиме передачи с широкой диаграммой направленности излучения возбуждают ультразвуковые колебания в объекте контроля. При приеме отраженных акустических волн пьезопреобразователи его последовательно располагают в различных точках на поверхности этого объекта контроля и запоминают принятые сигналы. Далее контролируемый объем объекта контроля дискредитируют точками фокусировки ультразвукового сигнала и каждый из них рассматривают как сосредоточенный отражающий элемент: эхо-сигналы, принятые в каждом из положений пьезопреобразователями, сдвигают назад во времени на величину, равную времени распространения отраженной волны от рассматриваемой точки фокусировки ультразвукового сигнала до соответствующего положения пьезопреобразователя, затем суммируют сдвинутые во времени сигналы для каждой точки фокусировки ультразвукового сигнала исследуемого объекта контроля и определяют амплитуду суммарного сигнала для каждой из этих точек фокусировки ультразвукового сигнала. Акустическое изображение объекта контроля формируют в виде значений амплитуд суммарных сигналов, соответственно, для каждой точки фокусировки ультразвукового сигнала объекта контроля. Таким способом исследуют различного вида твердых материалов как металлических, так и не металлических (прокаты, литые заготовки, поковки из различных видов стали и т.д.) на наличие дефектов (включений, трещин, непроливов, волосовин, непроваров и т.д.).
Для формирования акустического изображения объекта контроля требуется большое время постобработки отраженных акустических волн, связанное с последовательным расположением пьезопреобразователей в различных точках на поверхности объекта контроля.
Известен способ ультразвуковой томографии [RU 2458342 С1, МПК G01N 29/06 (2006.01), опубл. 10.08.2011], выбранный в качестве прототипа, включающий излучение в объекте контроля и прием из него ультразвуковых сигналов с помощью антенной решетки, фиксацию реализации ультразвуковых колебаний, принятых каждым пьезопреобразователем, при излучении ультразвукового сигнала независимо каждым ее пьезопреобразователем, и поточечное построение изображения внутренней структуры объекта контроля путем выбора изо всех принятых реализаций тех фрагментов, времена задержки которых равны временам распространения ультразвуковых сигналов от пьезопреобразователей, работающих в режиме передачи к каждой точке фокусировки ультразвукового сигнала объекта контроля и от нее к пьезопреобразователям, работающим в режиме приема, суммирования этих выбранных фрагментов для каждой точки фокусировки ультразвукового сигнала и записи результата суммирования. При известной толщине объекта контроля в результирующую сумму выбранных фрагментов реализации для каждой точки фокусировки ультразвукового сигнала дополнительно включают выборки фрагментов, времена задержек которых равны временам распространения ультразвуковых сигналов, переотраженных от донной и внешней поверхностей объекта контроля на траекториях от пьезопреобразователя, работающего в режиме передачи к данной точке фокусировки ультразвукового сигнала объекта контроля и от нее к пьезопреобразователю, работающему в режиме приема.
Для формирования томографического изображения объекта контроля необходимо большое время постобработки, связанное с большим количеством определений дистанций приемов и передач пьезопреобразователями через каждую точку фокусировки ультразвукового сигнала объекта контроля. Например, для построения томографического изображения внутренней структуры объекта контроля размером 100×100 точек фокусировки ультразвукового сигнала и использовании антенной решетки из 16 пьезопреобразователей необходимо определить 320000 дистанций.
Предлагаемый способ ультразвуковой томографии позволяет уменьшить время постобработки для формирования томографического изображения объекта контроля.
Согласно изобретению излучение в объект контроля ведут преобразователями с широкой диаграммой направленности, а точки фокусировки ультразвукового сигнала в объекте контроля выбирают на равном расстоянии друг от друга в виде прямоугольной матрицы, ряды которой располагаются параллельно линии контакта антенной решетки с объектом контроля и между соседними преобразователями антенной решетки располагалось целое число точек фокусировки ультразвукового сигнала, а расстояние между соседними точками фокусировки ультразвукового сигнала было одинаковым и меньше минимального размера дефекта, затем проводят расчет значений сигнала в каждой точке фокусировки ультразвукового сигнала путем суммирования тех реализаций ультразвуковых колебаний, времена задержки которых равны временам распространения ультразвуковых сигналов от пьезопреобразователей, работающих в режиме передачи к каждой точке фокусировки ультразвукового сигнала в объекте контроля и от нее к пьезопреобразователям, работающим в режиме приема, после этого запоминают полученный сигнал, кодируют цветовой гаммой и визуализируют полученное значение сигнала в каждой точке фокусировки.
Точки фокусировки ультразвукового сигнала в объекте контроля располагаются симметрично относительно позиций пьезопреобразователей антенной решетки и соответственно расстояние от пьезопреобразователя, работающего в режиме приема, до симметрично расположенных точек фокусировки ультразвукового сигнала в объекте контроля и от пьезопреобразователя, работающего в режиме приема до симметрично расположенных точек фокусировки ультразвукового сигнала в объекте контроля одинаковы и их рассчитывают только один раз, что сокращает время постобработки для формирования томографического изображения объекта контроля.
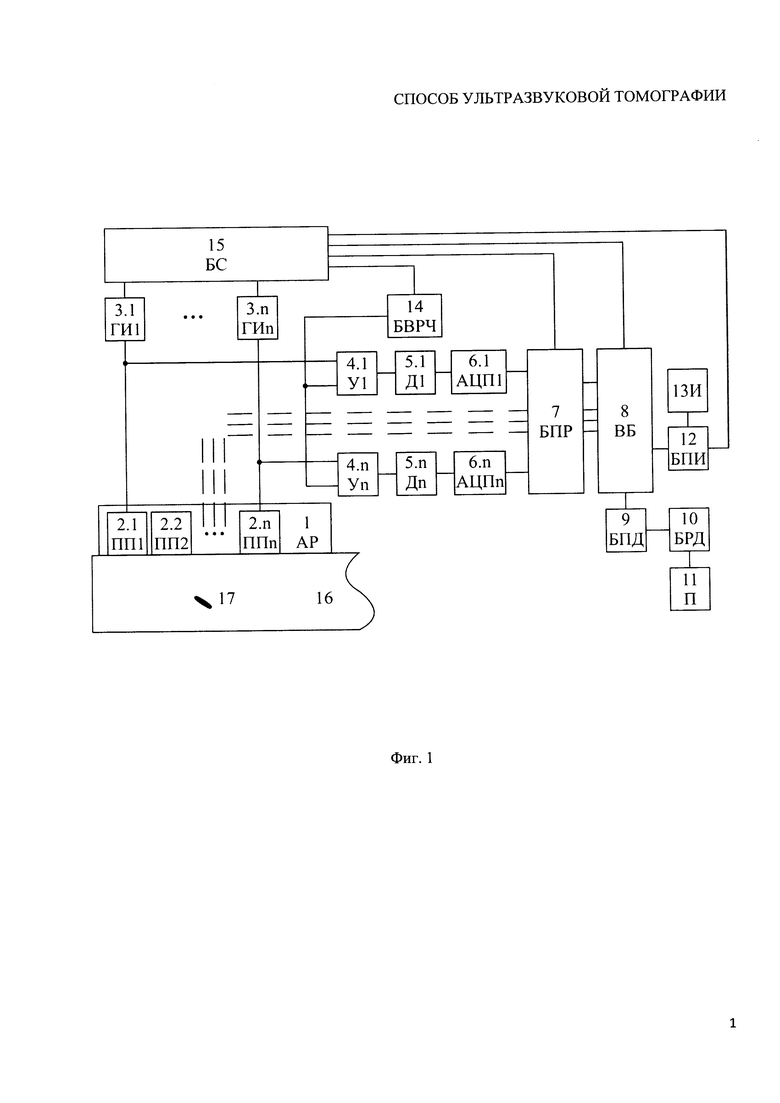
На фиг. 1 представлена схема устройства для осуществления предлагаемого способа.
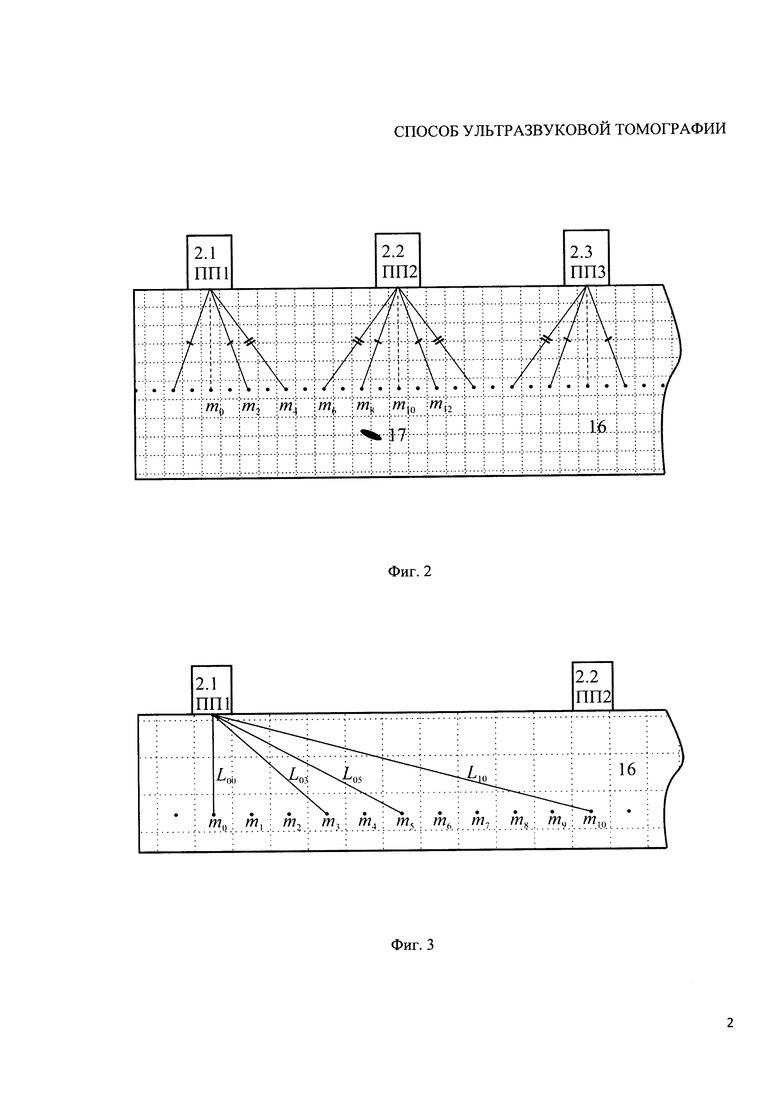
На фиг. 2 представлена область объекта контроля с 3-мя пьезопреобразователями антенной решетки. Показана симметрия расстояний от пьезопреобразователей до точек фокусировки ультразвукового сигнала расположенных параллельно линии контакта антенной решетки 1 (АР) с объектом контроля 15.
На фиг. 3 представлены расстояния от пьезопреобразователя 2.1 (ПП1) до 10-ти точек фокусировки ультразвукового сигнала объекта контроля.
На фиг. 4 представлено изображение дефекта 17.
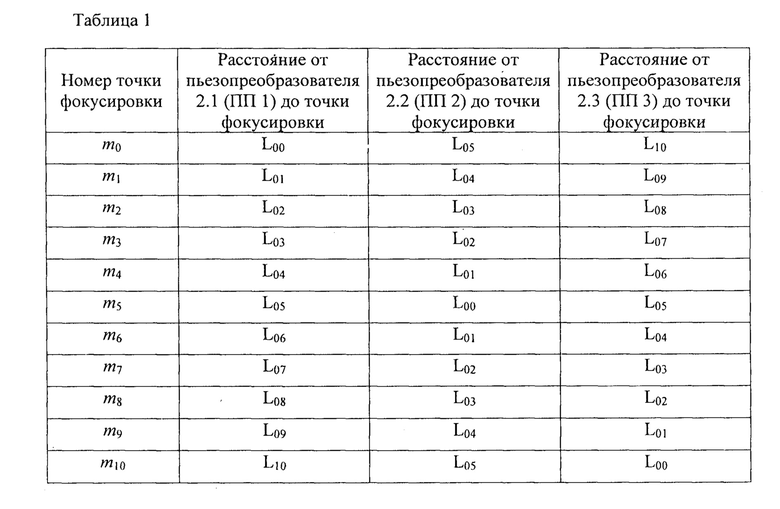
В таблице 1 представлены расстояния от пьезопреобразователей 2.1 (ПП1), 2.2 (ПП2) и 2.3 (ПП3), работающих в режиме передачи, до десяти точек фокусировки ультразвукового сигнала в объекте контроля.
В таблице 2 представлены расстояния до пьезопреобразователей 2.1 (ПП1), 2.2 (ПП2) и 2.3 (ПП3), работающих в режиме приема, от десяти точек фокусировки ультразвукового сигнала объекта контроля.
Способ ультразвуковой томографии осуществлен с помощью устройства (фиг. 1), содержащего антенную решетку 1 (АР), которая состоит из n пьезопреобразователей 2.1 (ПП1), …, 2.n (ППn), каждый из которых соединен с выходом соответствующего генератора импульсов 3.1 (ГИ1), …, 3n (ГИn) и с входом соответствующего усилителя 4.1 (У1), …, 4.n (Уn). К первому усилителю 4.1 (У1) последовательно подключены первый детектор 5.1 (Д1), первый аналого-цифровой преобразователь 6.1 (АЦП1). К n-му усилителю 4.n (Уn) последовательно подключены детектор 5.n (Дn) и аналого-цифровой преобразователь 6.n (АЦПn).
Выход каждого аналогово-цифрового преобразователя 6.1 (АЦП1), …, 6.n (АЦПn) соединен с соответствующим входом блока памяти реализаций 7 (БПР), количество выходов которого определяется формулой
N=n⋅(n+1)/2.
Выходы блока памяти реализаций 7 (БПР) соединены с соответствующими входами вычислительного блока 8 (ВБ). Вычислительный блок 8 (ВБ) соединен с входом блока памяти данных 9 (БПД), выход которого соединен с входом блока расчета дистанции 10 (БРД), входом которого является выход пульта 11 (П). Вычислительный блок 8 (ВБ) соединен с входом блока памяти изображений 12 (БПИ), выход которого соединен с индикатором 13 (И). Входы каждого генератора импульсов 3.1 (ГИ1), …, 3.n (ГИn), блока памяти реализаций 7 (БПР), вычислительного блока 8 (ВБ), блока памяти изображений 12 (БПИ) и блока временной регулировки чувствительности 14 (БВРЧ) соединены с блоком синхронизации 15 (БС). Выход блока временной регулировки чувствительности 14 (БВРЧ) подключен к каждому усилителю 4.1 (У1), …, 4.n (Уn). Антенная решетка 1 (АР) установлена на объекте контроля 16 (ОК).
Антенная решетка 1 (АР) является набором 16 или более пьезопреобразователей, располагаемых линейно, например, OLYMPUS 2L16-A1 с рабочей частотой 2 МГ. Генераторы импульсов 3.1 (ГИ1), …, 3.n (ГИn) выполнены на микросхемах, имеющих импульсный ток коллектора не менее 2А и выходное напряжение 90 В, например, STHV748. Усилители 4.1 (У1), …, 4.n (Уn) выполнены, например, на микросхемах AD603. Детекторы 5.1 (Д1), …, 5.n (Дn) выполнены на операционном усилителе, например, AD603. Аналого-цифровые преобразователи 6.1 (АЦП1), …, 6.n (АЦПn) выполнены, например, на микросхемах ADC9057. Блок памяти реализаций 7 (БПР), объемом не менее 64 Кб, выполнен, например, на микросхемах IDT72V293. Вычислительный блок 8 (ВБ) может быть выполнен на микроконтроллере, например, ATMEGA64 фирмы ATMEL. Блок памяти изображений 12 (БПИ), объемом не менее 100 МГб, может быть выполнен, например, на модулях памяти, используемых в персональных компьютерах, 1ГБ DDR SDRAM РС3200, 400МГц. Индикатор 13 (И) может быть выполнен на матричной панели или на мониторе персонального компьютера, например, BENQ G2320HDB. Блок временной регулировки чувствительности 14 (БВРЧ) может быть выполнен на цифро-аналоговом преобразователе, входящем в состав микроконтроллера, например, ATMEGA64 фирмы ATMEL. Блок синхронизации 15 (БС) может быть выполнен на микроконтроллере, например, ATMEGA64 фирмы ATMEL. Пульт 11 (П) может быть выполнен на 10 кнопках, например, KLS7-TS6601-11-180. Блок расчета дистанций 10 (БРД) может быть выполнен на микроконтроллере, например, ATMEGA64. Блок памяти данных 9 (БПД), объемом не менее 64 Кб, выполнен на типовых микросхемах, например, на микросхемах IDT72V293.
До начала проведения ультразвуковой томографии объекта контроля 16, например стальной поковки, у которой имелся дефект 17 с минимальным размером, равным 0,1 мм, оператор предварительно задал разрешающую способность устройства, учитывая минимальный размер дефекта 17, выбрал расстояние между соседними точками фокусировки ультразвукового сигнала m0, …, m160, располагающимися параллельно линии контакта акустической решетки 1 (АР) с объектом контроля 16, с учетом скорости работы используемых в схеме аналого-цифровых преобразователей 6.1 (АЦП1), …, 6.16 (АЦП16) и с учетом средней скорости распространения ультразвука в стали [Ермолов И.Н., Вопилкин А.Х., Бадалян В.Г. Расчеты ультразвуковой дефектоскопии. Краткий справочник. - М: ООО НК "ЭХО+", 2004. - С. 15].
Время работы аналого-цифровых преобразователей 6.1. (АЦП1), …, 6.16 (АЦП16) составило 12,5×10-9 секунд (1/f, где f - частота работы этих аналого-цифровых преобразователей, 80 МГц). Среднюю скорость распространения ультразвука в стальной поковке приняли равной 5150 м/с.Умножив скорость распространения ультразвука в стали на время работы аналого-цифровых преобразователей 6.1. (АЦП1), …, 6.16 (АЦП 16), получили минимальное расстояние между точками фокусировки ультразвукового сигнала равное 0,064 мм.
Для обнаружения дефекта 17 размером в 0,1 мм, с учетом расстояния 0,75 мм между соседними пьезопреобразователями 2.1 (ПП1), 2.2. (ПП2), …, 2.16. (ПП16) антенной решетки 1 (АР) OLYMPUS 2L16-A1, и учетом того, что количество точек фокусировки ультразвукового сигнала, которые помещаются между пьезопреобразователями, равно 10, определили расстояние между точками фокусировки ультразвукового сигнала равным 0,075 мм.
На стальную поковку установили антенную решетку 1 (АР) (фиг. 2), положение которой зафиксировали. С помощью пульта 11 (П) задали количество точек фокусировки ультразвукового сигнала, равное 10, которое поступило в блок расчета дистанций 10 (БРД), где определи дистанции от пьезопреобразователя 2.1 (ПП1) до точек фокусировки ультразвукового. Точка фокусировки ультразвукового сигнала то располагалась в объекте контроля 16 на глубине 0,075 мм под преобразователем 2.1 (ПП1). Другие точки фокусировки располагались в объекте контроля 16 на глубине 0,075 мм под пьезопреобразователями 2.1 (ПП1), 2.2. (ПП2), …, 2.16. (ПП16). Расположение точек фокусировки ультразвукового сигнала m0, …, m10 для пьезопреобразователя 2.1 (ПП1) и длины дистанций L00, …, L10 от пьезопреобразователя 2.1 (ПП1) до точек фокусировки ультразвукового сигнала m0, …, m10 приведены на фиг. 3. Данные с блока расчета дистанций 10 (БРД) записали в блок памяти данных 9 (БПД), из которого по мере необходимости расчетов вычислительный блок 8 (ВБ) брал данные.
С помощью пульта 11 (П) запускали работу первого цикла. В первом цикле работы антенной решетки 1 (АР) излучал первый пьезопреобразователь 2.1 (ПП1). Пьезопреобразователи 2.1 (ПП1), …, 2.16 (ПП16) работали в режиме приема и приняли 16 А-сканов, которые после усиления в усилителях 4.1 (У1), …, 4.16 (У16) и детектирования в детекторах 5.1 (Д1), …, 5.16 (Д16), преобразовали в цифровой вид в блоках аналого-цифровых преобразователей 6.1. (АЦП1), …, 6.16 (АЦП16). Цифровая форма А-сканов поступила в блок памяти реализаций 7 (БПР). Сохраненные данные использовали в вычислительном блоке 8 (ВБ) для расчета томограммы в первом цикле работы, путем выбора расчетных значений дистанции L00, …, L160 из блока памяти данных 9 (БПД), соответствующих значениям с аналого-цифровых преобразователей 6.1. (АЦП1), …, 6.16 (АЦП16), с учетом времени распространения ультразвука в стальной поковке. Результаты расчета первого цикла работы сохранили в блоке памяти изображений 12 (БПИ).
Во втором цикле работы антенной решетки 1 (АР), излучал второй пьезопреобразователь 2.2 (ПП2) и пьезопреобразователи 2.1 (ПП1), …, 2.16 (ПП16), работающие в режиме приема, приняли следующие 16 А-сканов, которые после усиления в блоках 4.1 (У1), …, 4.16 (У16) и детектирования в блоках 5.1 (Д1), …, 5.16 (Д16), преобразовали в цифровой вид в блоках 6.1. (АЦП1), …, 6.16 (АЦП16). Цифровая форма А-сканов поступила в блок памяти реализаций 7 (БПР). Сохраненные данные использовали в вычислительном блоке 8 (ВБ) для расчета томограммы во втором цикле работы, путем выбора расчетных значений дистанции L00, …, L160 из блока памяти данных 9 (БПД), соответствующих значениям с аналого-цифровых преобразователей 6.1. (АЦП1), …, 6.16 (АЦП16), с учетом времени распространения ультразвука в стальной поковке. Результаты расчета второго цикла работы сохранили в блоке памяти изображений 12 (БПИ). Результаты расчета просуммировали с предыдущими данными блока памяти изображений 12 (БПИ) и сохранили в блоке памяти изображений 12 (БПИ).
Цикл продолжался до тех пор, пока не отработали в режиме передачи все 16 пьезопреобразователей 2.1 (ПП1), …, 2.16 (ПП16) антенной решетки 1 (АР).
После того, как перебрали все точки фокусировки ультразвукового сигнала m0, …, m160 и записали информацию в блок памяти изображений 12 (БПИ), увеличили глубину точек фокусировки ультразвукового сигнала в объект контроля на 0,075 мм от антенной решетки. При этом точка фокусировки ультразвукового сигнала m161 располагалась в объекте контроля 16 на глубине 0,15 мм под преобразователем 2.1 (ПП1). Точки фокусировки m161, m171, …, m321 располагались в объекте контроля 16 на глубине 0,15 мм под пьезопреобразователями 2.1 (ПП1), 2.2. (ПП2), …, 2.16. (ПП16) антенной решетки 1 (АР). Повторили цикл перебора точек фокусировки ультразвукового сигнала m161, …, m321 и так далее 7, в соответствии с алгоритмом до его окончания.
После этого провели кодировку, с помощью вычислительного блока 8 (ВБ), цветовой гаммой информацию, сохраненную в блоке памяти изображений 12 (БПИ). Затем индикатор 13 (И) отобразил результат контроля, который показан на фиг. 4 и представляет собой плоскость отображения дефекта 17 в виде светлого следа на изображении.
В таблице 1 приведены дистанции от трех первых пьезопреобразователей 2.1. (ПП1), 2.2 (ПП2), 2.3 (ПП3) антенной решетки 1 (АР), работающих в режиме передачи до 10 точек фокусировки ультразвукового сигнала m0, …, m10. В таблице 2 приведены дистанции от 10 точек фокусировки ультразвукового сигнала m0, …, m10 до первых трех пьезопреобразователей 2.1. (ПП1), 2.2 (ПП2), 2.3 (ПП3) антенной решетки 1 (АР). Сравнение таблицы 1 и таблицы 2 показывает, что значения в них полностью совпадают и содержат в каждом столбце одинаковую информацию, но расположенную в разных ячейках, поэтому в вычислительном блоке 8 (ВБ) рассчитывали значения только одного столбца таблицы. Это позволило сократить количество расчетов еще в 3 раза. Таким образом, суммарное количество расчетов сократили в n2 раз, где n - количество пьезопреобразователей антенной решетки, что уменьшило время постобработки и позволило, по сравнению с прототипом, обрабатывать данные в реальном времени.
СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ 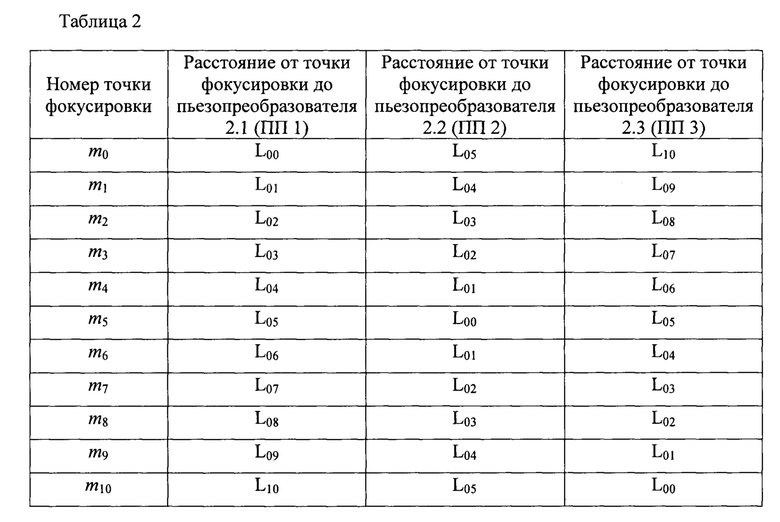
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2675214C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2013 |
|
RU2532606C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2799111C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2817123C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2796813C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2815491C1 |
| Способ ультразвуковой томографии | 2016 |
|
RU2639986C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ТРЕХМЕРНОГО ИЗДЕЛИЯ | 2013 |
|
RU2532597C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2679647C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458342C1 |
Использование: для визуализации внутреннего строения объектов с помощью ультразвуковых волн. Сущность изобретения заключается в том, что cпособ ультразвуковой томографии включает излучение в объект контроля и прием из него ультразвуковых сигналов с помощью антенной решетки, фиксацию реализации ультразвуковых колебаний, принятых каждым пьезопреобразователем при излучении ультразвукового сигнала независимо каждым ее пьезопреобразователем, и поточечное построение изображения внутренней структуры объекта контроля путем выбора изо всех принятых реализаций тех фрагментов, времена задержки которых равны временам распространения ультразвуковых сигналов от пьезопреобразователей, работающих в режиме передачи, к каждой точке фокусировки ультразвукового сигнала в объекте контроля и от нее к пьезопреобразователям, работающим в режиме приема, суммирование этих выбранных фрагментов для каждой точки фокусировки и запись результата суммирования. Излучение ведут в объект контроля преобразователями с широкой диаграммой направленности. Точки фокусировки ультразвукового сигнала в объекте контроля выбирают на равном расстоянии друг от друга в виде прямоугольной матрицы, ряды которой параллельны линии контакта антенной решетки с объектом контроля. Между соседними преобразователями антенной решетки располагают целое число точек фокусировки ультразвукового сигнала, так что расстояния между соседними точками фокусировки ультразвукового сигнала одинаковы и меньше минимального размера дефекта. Определяют значение ультразвукового сигнала в каждой точке фокусировки путем суммирования тех реализаций ультразвуковых колебаний, времена задержки которых равны временам распространения ультразвуковых сигналов от пьезопреобразователей, работающих в режиме передачи, к каждой точке фокусировки ультразвукового сигнала в объекте контроля и от нее к пьезопреобразователям, работающим в режиме приема. Полученные сигналы запоминают, кодируют цветовой гаммой и визуализируют каждую точку фокусировки. Технический результат: уменьшение времени постобработки формируемого томографического изображения объекта контроля. 4 ил.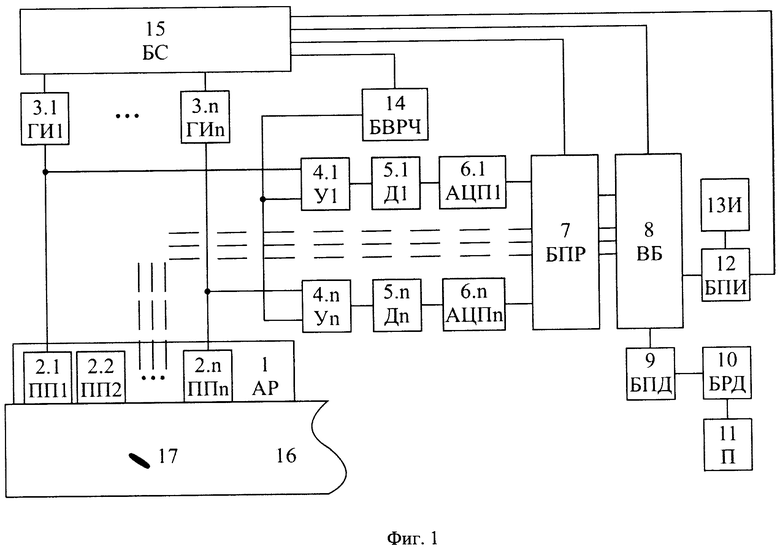
Способ ультразвуковой томографии, включающий излучение в объект контроля и прием из него ультразвуковых сигналов с помощью антенной решетки, фиксацию реализации ультразвуковых колебаний, принятых каждым пьезопреобразователем при излучении ультразвукового сигнала независимо каждым ее пьезопреобразователем, и поточечное построение изображения внутренней структуры объекта контроля путем выбора изо всех принятых реализаций тех фрагментов, времена задержки которых равны временам распространения ультразвуковых сигналов от пьезопреобразователей, работающих в режиме передачи, к каждой точке фокусировки ультразвукового сигнала в объекте контроля и от нее к пьезопреобразователям, работающим в режиме приема, суммирование этих выбранных фрагментов для каждой точки фокусировки и записи результата суммирования, отличающийся тем, что излучение ведут в объект контроля преобразователями с широкой диаграммой направленности, точки фокусировки ультразвукового сигнала в объекте контроля выбирают на равном расстоянии друг от друга в виде прямоугольной матрицы, ряды которой параллельны линии контакта антенной решетки с объектом контроля, между соседними преобразователями антенной решетки располагают целое число точек фокусировки ультразвукового сигнала, так что расстояния между соседними точками фокусировки ультразвукового сигнала одинаковы и меньше минимального размера дефекта, определяют значение ультразвукового сигнала в каждой точке фокусировки путем суммирования тех реализаций ультразвуковых колебаний, времена задержки которых равны временам распространения ультразвуковых сигналов от пьезопреобразователей, работающих в режиме передачи, к каждой точке фокусировки ультразвукового сигнала в объекте контроля и от нее к пьезопреобразователям, работающим в режиме приема, полученные сигналы запоминают, кодируют цветовой гаммой и визуализируют.
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458342C1 |
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| Способ томографической реконструкции акустических неоднородностей | 1989 |
|
SU1746219A1 |
| Способ ультразвуковой томографии | 1980 |
|
SU983531A1 |
| JP 2009153573 A, 16.07.2009 | |||
| US 2005054924 A1, 10.03.2005. | |||

