Изобретение относится к транспортировочной установке, спроектированной и выполненной с возможностью транспортировки рыбы поперечно ее продольной протяженности в направлении Т транспортирования и содержащей конвейерное устройство для транспортировки отдельных разделенных рыб в лежачем положении вдоль тракта TL транспортирования из загрузочной зоны Е конвейерного устройства к его разгрузочной зоне А, при этом конвейерное устройство содержит транспортирующий элемент, приводимый в действие с возможностью вращения.
Изобретение также относится к рыбообрабатывающей машине, содержащей транспортировочную установку, предназначенную для транспортировки рыбы в зону рыбообрабатывающей установки, и по меньшей мере одну рыбообрабатывающую установку.
Кроме того, изобретение относится к способу транспортировки рыбы поперечно ее продольной протяженности в направлении Т транспортирования, включающему этапы укладывания рыбы по отдельности на приводимый в действие с возможностью вращения транспортирующий элемент конвейерного устройства, предназначенного для транспортировки рыбы в лежачем положении вдоль тракта TL и транспортирования рыбы вдоль тракта TL из загрузочной зоны Е конвейерного устройства к его разгрузочной зоне А.
Такие транспортировочные установки, рыбообрабатывающие машины и способы используются в рыбообрабатывающей отрасли промышленности для автоматизированной обработки рыбы, при которой рыбу, в частности семгу или другую рыбу лососевых пород, а также рыбу других пород, например, из семейства силлаговых, транспортируют в рабочую зону отдельных обрабатывающих установок с помощью транспортировочной установки. Для обработки рыбы, например, при выполнении разрезания брюшной части и, в частности, при обезглавливании, то есть при отделении головы от тушки, точное позиционирование рыбы относительно соответствующего инструмента обрабатывающей установки является весьма важным для получения точного разреза и, в частности, высокой производительности. Если использовать в качестве примера обезглавливание, важно отделять голову от тушки настолько эффективно, насколько это возможно, т.е. отделять голову от тушки так, чтобы на тушке оставалось как можно больше потребляемой мясной массы.
Известны транспортировочные установки, в которых рыбу транспортируют в лежачем положении в направлении, поперечном ее продольной протяженности. Другими словами, во время транспортировки рыба лежит на транспортирующем элементе в положении на спине или на боку. В патентном документе США №2961697 приведено описание такой транспортировочной установки, в которой рыба лежит на боковой стороне тушки. Этот тип транспортировки является легко управляемым, так как рыба может быть расположена на транспортирующем элементе вручную или автоматически. Однако вследствие расположения рыбы на боку ее ось симметрии/плоскость симметрии (называемая в дальнейшем осью симметрии) смещается. Другими словами, в указанном положении рыба лежит на транспортирующем элементе несимметрично. В этом случае ось симметрии характеризует точное центральное положение каждой рыбы.
В этом случае, если режущий инструмент, например пара ножей для V-образного обезглавливания рыбы, входит во взаимодействие с рыбой, лежащей горизонтально и асимметрично, то две стороны рыбы будут разрезаны неравномерно. Вследствие «перекоса рыбы» пара ножей не сможет выполнить отделение головы без потери производительности. Это происходит, в частности, когда умерщвленные рыбы со вскрытыми брюшными полостями транспортируются, лежа на боку тушки, т.е. на боку с направленной вперед брюшной частью или спинной частью. Обработка рыб, лежащих на боку, в частности обезглавливание рыб, также является недостатком по другой причине. Неравномерное распределение веса относительно оси симметрии между двумя половинами тушки рыбы может привести к ненадлежащему итоговому разрезанию вследствие неопределенного положения рыбы. Ориентация горизонтально лежащей рыбы в определенном положении относительно оси симметрии не может быть получена или может быть получена лишь при значительном техническом усилии вследствие фактора, зависящего от продукта, и/или фактора, зависящего от качества, и/или физического фактора. Например, в качестве фактора, зависящего от продукта, указаны породы рыб, в качестве фактора, зависящего от качества, - состояние рыбы перед трупным окоченением или после него, а в качестве физического фактора - например, размер рыбы.
Например, из патентного документа Германии №1927916 известны транспортировочные установки, в которых транспортировка рыбы происходит в ее подвешенном состоянии в направлении, поперечном ее продольной протяженности. В указанном документе приведено описание транспортировочной установки, в которой рыба подвешивается вручную на транспортирующем элементе под ее грудными плавниками так, что рыба может быть подана к обрабатывающей установке или к каждой из них в подвешенном положении с направленной вверх головой. Таким образом, результат разрезания или производительность значительно зависит от точности подвешивания рыбы оператором. Для обезглавливания рыбы ее необходимо вновь повернуть вручную вокруг ее продольной оси в надлежащее положение для разрезания. Загрузка таких транспортировочных установок рыбой вручную, с одной стороны, и ориентирование рыбы вручную для обезглавливания, с другой стороны, приводит к неопределенной ориентации рыбы, с одной стороны, и к большому физическому напряжению операторов, с другой стороны. Кроме того, автоматизация таких этапов работы, с одной стороны, и фиксация рыбы в подвешенном положении, с другой стороны, требует значительных усилий с точки зрения проектирования. Следовательно, такие транспортировочные установки имеют различные недостатки, поэтому транспортировочные установки с транспортировкой рыбы в подвешенном состоянии с направленной вверх головой не преобладают над транспортировкой рыбы в лежачем положении, несмотря на сравнительно улучшенное симметричное положение рыбы.
Как указано выше, транспортировка рыб и их симметричная ориентация во время транспортировки являются чрезвычайно важными для обработки рыбы. Все решения, известные из уровня техники, имеют проблемы, которые связаны с симметричной ориентацией рыбы и результатом которых являются потери в производительности, возникающие во время обработки рыбы.
Таким образом, целью данного изобретения является создание конструктивно простой транспортировочной установки и способа, обеспечивающего обработку рыбы с высокой производительностью и независимо от ее качества. Целью также является создание соответствующей рыбообрабатывающей машины.
Данная цель достигается с помощью транспортировочной установки, имеющей вышеуказанные особенности, заключающиеся в том, что конвейерному устройству соответствует переходное устройство, которое спроектировано и выполнено с конвейерным устройством и функционально соединено с ним так, что рыба может быть перенесена автоматически из лежачего положения на тракте TL конвейерного устройства в подвешенное положение на тракт TH переходного устройства. Вследствие автоматически выполняемого изменения положения рыбы, а именно приема лежащей рыбы из тракта TL и ее переноса в подвешенное положение на тракт TH транспортирования, после переноса каждая рыба транспортируется независимо от ее качественного состояния в определенное и, прежде всего, симметричное положение так, что последующие этапы технологического процесса могут быть выполнены с высокой точностью, с одной стороны, и с возможностью воспроизводимости и высокой производительностью, с другой стороны. Преимущества известных транспортировочных установок, а именно легкость в управлении и простое конструктивное выполнение горизонтальной транспортировки в направлении, поперечном продольной протяженности, с одной стороны, и оптимизированное центрирование рыбы во время транспортировки в подвешенном состоянии поперечно продольной протяженности, с другой стороны, достигаются с помощью вариантов выполнения согласно изобретению. Это создает основу для особенно эффективной обработки рыбы с точки зрения производительности.
Особенно предпочтительный вариант выполнения характеризуется тем, что переходное устройство содержит подвесное конвейерное устройство, расположенное над конвейерным устройством для горизонтальной транспортировки рыбы и предназначенное для транспортировки подвешенной рыбы вдоль тракта TH, и средства для переноса рыбы, а именно для удаления рыбы из конвейерного устройства, предназначенного для транспортировки рыбы в лежачем положении, и удерживания рыбы во время транспортировки в подвешенном состоянии вдоль тракта TH. Это обеспечивает получение конструктивно простой транспортировочной установки, объединяющей легкость управления при транспортировке рыбы в лежачем положении, а также точное ориентирование рыбы при транспортировке в подвешенном состоянии.
Предпочтительно подвесное конвейерное устройство проходит за пределы конвейерного устройства в направлении Т транспортирования, при этом переходная область для рыбы, проходящей из конвейерного устройства к подвесному конвейерному устройству, выполнена в зоне перекрытия конвейерного устройства и подвесного конвейерного устройства перед разгрузочной зоной А конвейерного устройства в направлении Т транспортирования. Другими словами, подвесное конвейерное устройство начинается над конвейерным устройством так, что рыбы расположены по меньшей мере временно между нижним транспортирующим элементом и находящимся над ним подвесным конвейерным устройством. Перенос рыбы из конвейерного устройства в подвесное конвейерное устройство может происходить надежным образом в области перехода. Однако поскольку подвесное конвейерное устройство проходит за пределы конвейерного устройства в направлении Т транспортирования и, соответственно, тракт TH проходит за пределы тракта TL, в направлении Т транспортирования за конвейерным устройством под подвесным конвейерным устройством образуется свободное пространство, в которое рыба, подвешенная на подвесном конвейерном устройстве, может поворачиваться для ее симметричной ориентации.
Предпочтительный вариант характеризуется тем, что подвесное конвейерное устройство содержит транспортирующий элемент, который приводится в действие с возможностью вращения и на котором расположено указанное средство для удаления и удерживания рыбы, причем указанное средство содержит по меньшей мере одно захватное средство для захвата головы рыбы. Благодаря вращающимся транспортирующим элементам подвесного конвейерного устройства захватные средства регулярно проходят через переходную область так, что рыба, транспортируемая в переходную область с помощью конвейерного устройства, может быть удалена из указанного устройства. Подвесное конвейерное устройство и конвейерное устройство входят в рабочее соединение друг с другом в переходной области благодаря средству для удаления и удерживания рыбы. Другими словами, конвейерное устройство и подвесное конвейерное устройство действуют в переходной области совместно в том смысле, что затем конвейерное устройство доставляет рыбу синхронизированным образом, когда средство для удаления и удерживания проходит через переходную область. Тот факт, что захват рыбы происходит за голову, обеспечивает особенно стабильную и точную ориентацию рыбы в симметричном положении.
Предпочтительно транспортирующий элемент подвесного конвейерного устройства представляет собой транспортирующую цепь, приводимую в действие с возможностью вращения вокруг отклоняющей и/или приводной рабочей части, центральные оси и/или оси R1 вращения которой расположены горизонтально и поперечно направлению Т транспортирования так, что средство для удаления и удерживания рыбы перемещается в вертикальной плоскости EV и находится на наименьшем расстоянии от транспортирующего элемента конвейерного устройства в переходной области. Транспортирующая цепь направляется вокруг по меньшей мере двух отклоняющих и/или приводных рабочих частей, причем одна отклоняющая и/или приводная рабочая часть расположена над конвейерным устройством, а другая отклоняющая и/или приводная рабочая часть расположена за конвейерным устройством в направлении Т транспортирования. Вследствие наличия отклоняющей и/или приводной рабочей части, расположенной над конвейерным устройством, средство для захвата в вертикальной плоскости EV опускается сверху в направлении конвейерного устройства в начале переходной области с обеспечением предотвращения столкновения с рыбой, доставляемой горизонтально в плоскости EH транспортировки.
Предпочтительный вариант выполнения характеризуется тем, что средство для удаления и удерживания рыбы содержит захватные средства, вращающиеся вместе с транспортирующим элементом подвесного конвейерного устройства, причем каждое захватное средство содержит два захватных элемента, при этом по меньшей мере один захватный элемент выполнен с по меньшей мере одной иглой, направленной к захватываемой рыбе. Благодаря захватным элементам, с одной стороны, и указанной по меньшей мере одной игле, с другой стороны, может быть получено надежное и жесткое присоединение к голове рыбы простым и эффективным способом так, что рыба может надежно и стабильно удерживаться в положении приема.
Предпочтительно первый захватный элемент содержит захватный рычаг, на свободном конце которого расположена жесткая игольчатая рабочая часть, закрепленная с предотвращением кручения, а второй захватный элемент содержит захватный рычаг, на свободном конце которого расположена игольчатая рабочая часть, поддерживаемая с возможностью поворота, причем захватные рычаги спроектированы и выполнены с возможностью автоматического перемещения по направлению друг к другу в положение удерживания и друг от друга в положение высвобождения, и наоборот, в вертикальной плоскости EV, при этом в горизонтальном положении центральные оси и/или оси М поворота игольчатых рабочих частей расположены горизонтально и параллельно направлению Т транспортирования. Две игольчатые рабочие части, направленные друг к другу на конце подвижных захватных рычагов, образуют подобие клещей, с помощью которых каждая рыба может безопасным образом подбираться и удерживаться. Вследствие того что по меньшей мере одна игольчатая рабочая часть поддерживается с возможностью поворота, рыба, выходящая из конвейерного устройства, может разворачиваться или поворачиваться из горизонтального положения в вертикальное положение простым способом.
Способность захватных рычагов перемещаться друг к другу и друг от друга обеспечивает возможность надежного подбора рыбы между захватным рычагами и игольчатыми рабочими частями, расположенными на них, вследствие их поворота друг от друга, а также возможность надежного закрепления рыбы вследствие их поворота со сведением вместе. Наконец, рыба «нанизывается» снизу в раскрытые захватные рычаги в переходной области с обеспечением ее последующего удерживания в определенном положении в результате закрытия захватных рычагов. Центральные оси и/или оси вращения, расположенные горизонтально и параллельно направлению Т транспортирования в положении удерживания, обеспечивают расположение рыбы в симметричном положении в подвешенном состоянии на подвесном конвейерном устройстве.
Предпочтительный вариант характеризуется тем, что первая игольчатая рабочая часть первого захватного элемента содержит иглу, полностью проходящую сквозь голову рыбы, причем указанная игла входит во вторую игольчатую рабочую часть в положении удерживания, ввиду чего вторая игольчатая рабочая часть второго захватного элемента имеет отверстие для приема иглы первой игольчатой рабочей части, при этом вокруг указанного отверстия второй игольчатой рабочей части расположены по меньшей мере две иглы, проникающие в голову. Вследствие такой конфигурации захватные средства обеспечивают надежное удерживание рыбы так, что даже рыба с большим весом надежно и точно удерживается в требуемом положении, в частности, при развороте вниз после выхода из конвейерного устройства.
Предпочтительно в положении удерживания единственная центральная игла первой игольчатой рабочей части образует ось S поворота, расположенную горизонтально и параллельно направлению Т транспортирования для каждой рыбы, так что рыба после разворота в подвешенное положение может принимать устойчивое состояние в симметричном положении.
Предпочтительный вариант выполнения изобретения характеризуется тем, что транспортирующий элемент спроектирован и выполнен для транспортирования рыбы в лежачем положении вперед брюшком или спинкой в направлении Т транспортирования и содержит конвейерную ленту, содержащую перегородки, проходящие поперечно направлению Т транспортирования и перпендикулярно плоскости EH транспортирования и вращающиеся вместе с конвейерной лентой, для разделения указанной ленты на отдельные секции, каждая из которых принимает одну рыбу, при этом перегородки проходят в каждом случае лишь по части ширины конвейерной ленты. Эти перегородки, которые также называются планками, образуют упор для рыб на их брюшной стороне или предпочтительно на спинной стороне, когда рыбы размещены на конвейерной ленте, так, что в последнем случае рыба транспортируется с примыканием спинки к перегородке и вперед брюшком. Поскольку перегородки проходят лишь по части ширины конвейерной ленты, перегородка предпочтительно имеет выемку в области, соответствующей голове рыбы, и оканчивается, таким образом, с образованием зазора относительно бокового края конвейерной ленты, на котором расположена голова рыбы, так что имеется пространство для вхождения во взаимодействие с захватными средствами. Другими словами, в краевой зоне конвейерной ленты образован свободный проход, что обеспечивает захват рыбы без столкновения.
Особенно предпочтительно по меньшей мере на одной стороне в направлении Т транспортирования к конвейерной ленте присоединен закрепленный упорный элемент для расположения каждой рыбы в ее продольной ориентации поперечно направлению Т транспортирования, причем упорный элемент спроектирован и выполнен с возможностью расположения головы рыбы в определенном положении. Этот упорный элемент ограничивает конвейерную ленту сбоку, то есть на той стороне, на которой рыбы лежат головой. При размещении на конвейерной ленте рыбы ударяются об упорный элемент передним кончиком рта так, что они ложатся головой в проход, образованный между перегородками и упорным элементом.
В предпочтительном варианте конвейерная лента, которая образована верхней ветвью в качестве ветви транспортирования и нижней ветвью в качестве холостой ветви, направляется вокруг по меньшей мере трех отклоняющих и/или приводных рабочих частей, центральные оси и/или оси R2 вращения которых расположены горизонтально и поперечно направлениюТ транспортирования, при этом в зоне верхней ветви конвейерная лента имеет первую секцию I, проходящую в плоскости EH1 транспортирования, и вторую секцию II, следующую за ней в направлении Т транспортирования и проходящую в плоскости EH2 транспортирования, причем плоскость EH2 расположена выше плоскости EH1, так что рыба транспортируется конвейерной лентой по наклонной траектории от плоскости EH1 к плоскости EH2 через соединительную секцию III. Другими словами, ветвь транспортирования, на которой лежит рыба во время транспортировки, сначала ориентирована горизонтально в плоскости EH1 от загрузочной зоны Е до разгрузочной зоны А, затем проходит наклонно в направлении Т транспортирования и после этого проходит вновь горизонтально в плоскости EH2. Зона, в которой ветвь транспортирования проходит от восходящей соединительной секции в секцию плоскости EH2, расположена в вертикальном направлении ниже отклоняющей и/или приводной рабочей части подвесного конвейерного устройства. Этот вариант выполнения значительно упрощает «нанизывание» рыбы между захватными элементами. Захватные элементы, проходящие сверху от вертикальной плоскости EV, входят в контакт с рыбой, транспортируемой наклонно снизу вверх, при раскрытых захватных рычагах. Затем в зоне наименьшего зазора между захватными средствами и ветвью транспортирования в начале переходной области рыбу точно позиционируют между обеими игольчатыми рабочими частями захватных элементов. Это обеспечивает безопасное позиционирование рыбы в переходной области без столкновений.
В особенно предпочтительном варианте конвейерная лента выполнена с возможностью регулирования по высоте по меньшей мере в переходной области. Другими словами, секция ветви транспортирования, образующая плоскость EH2 транспортирования, является регулируемой по высоте. Это обеспечивает возможность изменения расстояния между ветвью транспортирования и захватными средствами, а следовательно, и расстояния между головой рыбы и захватными средствами, для постоянного обеспечения захвата рыбы в зоне оси симметрии, независимо от толщины головы рыбы. Другими словами, каждая рыба может быть захвачена отдельно по ее оси симметрии, что приводит к оптимально ориентированному подвешенному положению. В дополнение к компенсации высоты для рыб с различными размерами, регулирование высоты также обеспечивает компенсацию наклона оси симметрии, которая возникает в зависимости от тушки вследствие бокового расположения рыбы на ветви транспортирования.
Особенно предпочтительным оказался вариант выполнения, характеризующийся выполнением секции конвейерной ленты, проходящей в плоскости EH2 транспортирования, с возможностью поворота при помощи привода вокруг оси С поворота, расположенной горизонтально и поперечно направлению Т транспортирования. Вследствие поворота вокруг оси С, предпочтительно лежащей в зоне перехода от соединительной секции ветви транспортирования, на которой лежит секция ветви транспортирования, проходящая в плоскости EH2, и в которой особенно предпочтительно указанная секция соответствует центральной оси и/или оси R2 вращения отклоняющей и/или приводной рабочей части транспортирующей цепи, даже небольшие поворотные перемещения на несколько градусов приводят к требуемому компенсационному эффекту в отношении расстояния между ветвью транспортирования и захватным средством.
Предпочтительный вариант характеризуется тем, что транспортировочная установка содержит измерительное средство для регистрации и/или определения данных о размерах рыбы, в частности, для определения толщины головы в направлении, перпендикулярном плоскости EH, и ширины головы в плоскости EH в направлении Т транспортирования, причем измерительное средство расположено перед переходной областью в направлении Т транспортирования. Измерительное средство спроектировано и выполнено, с одной стороны, с возможностью выявления высоты головы, начиная от опорной поверхности до наивысшей точки головы, для определения оси симметрии. С другой стороны, измерительное средство спроектировано и выполнено с возможностью выявления ширины головы, то есть расстояния от нижней стороны нижней челюсти до верхней стороны верхней челюсти. Как вариант, также может быть выявлено расстояние от нижней стороны нижней челюсти до перегородки, на которую рыба опирается спинкой.
Предпочтительно измерительное средство закреплено над конвейерным устройством и содержит мерную лопатку, выполненную и расположенную с возможностью ее отклонения головой рыбы. Более конкретно, измерительное средство расположено над секцией ветви транспортирования, проходящей в плоскости EH1 транспортирования. Благодаря расположению головы рыбы на упорном элементе, транспортированию рыбы вперед брюшком в направлении Т транспортирования и расстоянию между перегородками конвейерной ленты и упорным элементом, мерная лопатка неизбежно входит в контакт с рыбой без столкновения с ней в проходе и, соответственно, может выполнять необходимые этапы измерения надежным и простым способом и передавать полученную информацию.
Предпочтительно в зоне измерительного средства, а именно непосредственно под измерительным средством, на упорном элементе расположен закрепленный приемный элемент, спроектированный и выполненный с возможностью приема рыбы ее головой так, что верхняя поверхность скольжения приемного элемента, направленная к измерительному элементу и ориентированная параллельно плоскости EH1 транспортирования, образует отсчетную плоскость для измерительного средства при определении толщины головы рыбы и уточнении положения оси симметрии головы рыбы. Приемный элемент, который расположен над конвейерной лентой так, что лента может перемещаться под указанным элементом, имеет пологий наклон в направлении Т транспортирования, который переходит в горизонтальную поверхность скольжения. Свободный/полый промежуток под головой рыбы может быть заполнен приемным элементом так, что голова рыбы находится под измерительным средством, при этом ось симметрии расположена по возможности горизонтально. Кроме того, приемный элемент может компенсировать нерегулярности в отношении положения головы вследствие, например, неправильного или неточного размещения рыбы, обусловленного происхождением рыбы, размером рыбы, способом умерщвления, типом промежуточного хранения или другими факторами.
Особенно предпочтительно на упорном элементе в переходной области также закреплен приемный элемент, спроектированный и выполненный с возможностью приема рыбы ее головой, при этом указанные два приемных элемента выполнены одинаково с точки зрения их высоты, начиная от поверхности конвейерной ленты и до верхней поверхности скольжения приемного элемента, так что положение оси симметрии головы рыбы, определяемое измерительным средством, является воспроизводимым в переходной области, когда оно выполняется в комбинации с регулированием высоты конвейерной ленты. Таким образом, в зоне захватного средства, которая расположена выше переходной области или является положением для захвата, созданы те же обстоятельства или граничные условия в отношении позиционирования, что и в местоположении измерительного средства. Другими словами, приемный элемент в переходной области обеспечивает возможность переноса рыбы при захвате в оптимальное положение относительно захватного средства с достижением оптимальной ориентации рыбы так, что указанное захватное средство может входить во взаимодействие в местоположении оси симметрии, определенном измерительным средством.
В особенно предпочтительном варианте транспортировочная установка содержит устройство управления, к которому присоединены указанный или каждый привод для конвейерной ленты конвейерного устройства, и/или указанный или каждый привод для регулирования высоты конвейерной ленты конвейерного устройства, и/или измерительное средство. При использовании устройства управления и присоединении указанных компонентов рыба может транспортироваться автоматическим и точным образом в оптимальное положение захвата, в котором измерение рыбы выполняется индивидуально, при этом с учетом измеренных значений скорость транспортирования рыбы на конвейерной ленте и регулирование высоты в переходной области ветви транспортирования являются управляемыми. Контроллер приводов для конвейерной ленты конвейерного устройства может использоваться для изменения скорости транспортирования, например, для предотвращения сталкивания перегородок конвейерной ленты с рыбой в наклонной зоне. Регулирование скорости конвейерной ленты также имеет большое значение при позиционировании головы рыбы под захватным средством. Скорость транспортирования может регулироваться в зависимости от ширины головы рыбы так, что сначала с головой рыбы взаимодействует игольчатая рабочая часть, поддерживаемая с возможностью поворота, для создания упора для жесткой игольчатой рабочей части, полностью проходящей сквозь голову рыбы. Это может эффективно препятствовать кручению головы при захвате.
Предпочтительно расстояние от измерительного средства до упорного элемента в направлении, поперечном направлению Т транспортирования, т.е. точка измерения, соответствует расстоянию от центральной оси и/или оси М поворота игольчатых рабочих частей в положении удерживания до упорного элемента в направлении, поперечном направления Т транспортирования. Другими словами, расстояние между передним кончиком рта рыбы, опирающимся на упорный элемент, и центральной точкой контакта мерной лопатки равно расстоянию b между передним кончиком рта рыбы, опирающимся на упорный элемент, и контактной точкой жесткой игольчатой рабочей части, содержащей одну центральную иглу.
Предпочтительный вариант предусматривает выполнение ударного элемента, который направлен по существу вертикально вниз от плоскости EH2, ударная поверхность которого ориентирована в направлении подвешенной рыбы и который расположен в направлении Т транспортирования за конвейерным устройством для горизонтальной транспортировки рыбы, вдоль тракта TH подвесного конвейерного устройства. Ударный элемент поглощает энергию от разворачивающейся вниз рыбы для поддержания и, в частности, для ускорения стабилизации разворачивающейся рыбы, чтобы остановить рыбу в ее подвешенном положении.
Указанная цель также достигается с помощью рыбообрабатывающей машины, которая имеет вышеописанные особенности и в которой транспортировочная установка спроектирована и выполнена в соответствии с одним или более из пунктов 1-21 формулы изобретения, при этом указанная или каждая рыбообрабатывающая установка расположена в зоне, в которой рыба находится в подвешенном положении. Возникающее при этом преимущество описано выше в отношении транспортировочной установки, поэтому для исключения повторений ниже сделана ссылка на соответствующие разделы. Крайне важно, чтобы рыба находилась в подвешенном положении до достижения первой рыбообрабатывающей установки для обеспечения оптимизированной ориентации рыбы, в частности, в отношении ее оси симметрии, поскольку в этом положении соответствующие этапы технологического процесса могут быть выполнены с необходимой точностью, с одной стороны, и максимальной производительностью, с другой стороны.
Рыбообрабатывающая машина предпочтительно спроектирована и выполнена с возможностью обезглавливания не умерщвленных и/или умерщвленных рыб со вскрытыми брюшными полостями, при этом рыбообрабатывающая установка вдоль тракта TH транспортирования подвесного конвейерного устройства спроектирована и выполнена в виде обезглавливающего аппарата. Во время обезглавливания весьма важным является симметричное положение рыбы. Каждая рыба может быть обезглавлена эффективным способом с точки зрения производительности благодаря варианту выполнения согласно изобретению.
Особенно предпочтительный вариант выполнения характеризуется тем, что обезглавливающий аппарат содержит отделяющее устройство, предназначенное для отделения тушки рыбы, подвешенной за голову, и содержащее пару дисковых ножей, приводимых в действие с возможностью вращения, при этом дисковые ножи расположены с V-образной формой относительно друг друга на противоположных сторонах тракта TH транспортирования. Благодаря положению подвешенной рыбы, с одной стороны, и расположению пары дисковых ножей, с другой стороны, обезглавливание может быть выполнено особенно эффективным способом, т.е. с наименьшей возможной потерей мясной массы. Другими словами, дисковые ножи могут быть введены в рыбу с точным расположением и симметричным образом так, что голова рыбы будет почти свободна от мясной массы. Другими словами, на тушке остается максимальное количество мясной массы, в частности, также шейная мясная масса и мясная масса в области ключиц.
Предпочтительно имеется измерительное средство для выявления и/или определения положения ключиц каждой подвешенной рыбы, расположенное в направлении Т транспортирования за конвейерным устройством и перед обезглавливающим аппаратом, в тракте TH подвесного конвейерного устройства. Направление дисковых ножей может быть обеспечено еще более точным образом с помощью этого дополнительного измерительного средства, поскольку известно точное положение, при котором вводятся дисковые ножи.
Предпочтительно имеется средство для захвата грудных плавников, расположенное в направлении Т транспортирования за конвейерным устройством для горизонтальной транспортировки рыбы и перед обезглавливающим аппаратом, в тракте ТН транспортирования подвесного конвейерного устройства. При данном варианте выполнения подача каждой рыбы к дисковым ножам может быть выполнена с оптимальной ориентацией для отделения головы от тушки.
Указанная цель также достигается с помощью способа, который включает вышеописанные этапы и в котором рыбу переносят автоматически из лежачего положения в подвешенное положение с помощью переходного устройства, при этом рыбу поднимают с конвейерного устройства с использованием переходного устройства вдоль тракта TL и приводят в подвешенное положение во время ее транспортировки вдоль тракта TH. Данный способ особенно простым и эффективным образом сочетает преимущества транспортировки в лежачем положении, особенно во время введения и ориентирования рыбы, с преимуществами транспортировки в подвешенном положении, особенно во время симметричного позиционирования и подачи рыбы для фактической обработки.
Преимущества наличия индивидуальных этапов обработки способа согласно изобретению объяснены выше в отношении транспортировочной установки и рыбообрабатывающей машины, поэтому для исключения повторений ниже сделана ссылка на соответствующие разделы.
Предпочтительно рыбу транспортируют вперед брюшком в направлении Т транспортирования, причем спинка расположена на перегородках, проходящих поперечно направлению Т конвейерной ленты транспортирующего элемента, а голова опирается на упорный элемент, связанный с конвейерной лентой, при этом данные о размерах рыбы, в частности о толщине головы в направлении, перпендикулярном плоскости EH, в которой проходит конвейерная лента, и/или о ширине головы в плоскости EH в направлении Т транспортирования, регистрируют и/или определяют в секции I конвейерной ленты с помощью измерительного средства. С помощью этих этапов рыбу, введенную вручную или автоматически, приводят в определенное положение, в котором затем могут быть записаны требуемые данные о рыбе. Вместо ширины головы также может быть определено расстояние от нижней стороны нижней челюсти рыбы, транспортируемой вперед брюшком, до перегородки, на которую рыба опирается спинкой. Как вариант, рыба также может транспортироваться вперед спинкой, при этом она опирается на перегородку брюшком.
В предпочтительном варианте положение оси симметрии головы определяют исходя из толщины головы. Определение центральной оси головы обуславливает требование захвата рыбы с ее точно симметричной ориентацией в подвешенном положении, в результате чего последующая обработка может быть выполнена с особенно высокой производительностью.
Предпочтительно в секции II конвейерной ленты рыбу подают к захватному средству, которое захватывает рыбу за голову, при этом положение головы в направлении, перпендикулярном захватному средству, регулируют путем регулирования высоты секции II конвейерной ленты в зависимости от данных, зарегистрированных и/или определенных измерительным средством, так, что в зоне захватного средства голова рыбы расположена в той же плоскости, что и в зоне измерительного средства. Вследствие регулирования высоты каждая рыба, независимо от ее размера, перемещается в оптимальном положении для захвата, предварительно зарегистрированном и/или определенном измерительным средством.
Предпочтительный вариант способа характеризуется тем, что для захвата головы рыбы за нижнюю челюсть на брюшной стороне и за верхнюю челюсть на спинной стороне в каждом случае в голову рыбы проникает одна игольчатая рабочая часть в результате перемещения двух захватных рычагов захватного средства, на которых расположены игольчатые рабочие части, из положения высвобождения в положение удерживания. Двустороннее проникновение игольчатых рабочих частей обеспечивает надежное удерживание, так что рыба может транспортироваться дальше в оптимальной ориентации.
Предпочтительно каждое захватное средство вдоль подвесного конвейерного устройства переходного устройства в плоскости EV, расположенной перпендикулярно плоскости EH, перемещается за пределы тракта TL конвейерного устройства вдоль тракта TH так, что захваченная за голову рыба поворачивается в подвешенное положение после выхода из конвейерного устройства. Сначала рыбу подают в горизонтальном положении для оптимизации ее ориентации. Рыбу захватывают в оптимальной ориентации при ее нахождении все еще в лежачем плоском положении. При транспортировании рыбы, подвешенной за голову, за пределы конвейерного устройства вдоль тракта TH, который представляет собой простое продолжение тракта TL, рыбу, условно говоря, лишают ее опоры так, что свободно подвешенная рыба затем может развернуться до достижения остановки. Это обеспечивает особенно простую и надежную передачу рыбы.
В особенно предпочтительном варианте во время транспортировки вдоль тракта TL из секции I в секцию II конвейерной ленты рыбу располагают снизу между захватными рычагами, находящимися в положении высвобождения, при этом указанные захватные рычаги перемещают сверху в вертикальной плоскости EV в направлении конвейерной ленты. Подача также может осуществляться исключительно горизонтально. Однако в предпочтительном способе рыба может быть «нанизана» между раскрытыми захватными рычагами, находящимися в положении высвобождения, снизу особенно легко и без столкновений. В переходной области секции II захватные рычаги, проходящие сверху в их раскрытом положении, таким образом, входят в контакт с рыбой, подаваемой снизу так, что она может быть легко и точно размещена между захватными рычагами, которые затем перемещаются вдоль тракта TH транспортирования.
Для этого захватные рычаги предпочтительно перемещают по направлению друг к другу в вертикальной плоскости EV так, что жесткая игольчатая рабочая часть с одной иглой полностью проходит сквозь голову рыбы со спинной стороны, тогда как вторая игольчатая рабочая часть, поддерживаемая с возможностью поворота и выполненная с по меньшей мере двумя иглами, проникает в голову с брюшной стороны. В то время как игольчатая рабочая часть поддерживает голову рыбы с брюшной стороны в качестве, условно говоря, упора, единственная игла указанной части полностью проходит сквозь голову рыбы со спинной стороны, так что рыба закреплена особенно надежно. Особое преимущество заключается в том, что полностью проникающая игла образует ось поворота для рыбы при ее разворачивании вниз, причем указанное разворачивание происходит при поддержании с помощью поворотной игольчатой рабочей части.
Было установлено, что особенно преимущественным является изменение скорости конвейерной ленты в зависимости от зарегистрированных и определенных данных, в частности ширины головы в плоскости EH в направлении Т транспортирования, когда рыба расположена в зоне захватного средства, таким образом, что поворотная игольчатая рабочая часть с указанными по меньшей мере двумя иглами входит в контакт с головой рыбы в то же время, что и жесткая игольчатая часть, или раньше по времени. Все рыбы имеют головы с различной шириной или с различным расстоянием между нижней стороной нижней челюсти и перегородкой, на которую они опираются. Для постоянного обеспечения контакта с оптимальной точкой захвата и/или предотвращения смещения рыбы, в частности, обусловленного тем, что жесткая игольчатая рабочая часть преждевременно ударяет одной жесткой иглой захватных средств по голове рыбы, независимо от этого положения и/или размера скорость транспортирования при необходимости уменьшают непосредственно перед выполнением захвата с обеспечением ее увеличения вновь до исходной скорости транспортирования сразу после выполнения захвата.
Предпочтительно скорость конвейерной ленты изменяют, когда рыба расположена в разгрузочной зоне А конвейерного устройства, таким образом, что обеспечивают предотвращение столкновения конвейерной ленты или расположенных на ней перегородок с разворачивающейся рыбой, причем указанные изменения скорости транспортирования согласуют друг с другом при захвате рыбы, с одной стороны, и при развороте рыбы, с другой стороны, путем секционирования конвейерной ленты. Когда рыба разворачивается вниз, существует риск, что рыба, еще лежащая прямо на конвейерной ленте, будет находиться в контакте с продолжающейся конвейерной лентой и, в частности, с вертикальной перегородкой, на которой лежит рыба. Для предотвращения этого скорость конвейерной ленты на короткое время снижают, чтобы предотвратить столкновение. Секционирование конвейерной ленты, т.е. разнесение перегородок и, соответственно, рыбы на конвейерной ленте, выбирают так, что регулирование скорости в одной области не влияет на другую область. Вместо снижения скорости транспортирования конвейерной ленты конвейерного устройства также может быть соответственно ускорено подвесное конвейерное устройство.
Особенно предпочтительно рыба проходит головой на приемный элемент для регистрации и/или определения соответствующих данных о ее размерах таким образом, что голова рыбы возвышается относительно плоскости EH транспортирования. В результате прохождения головы рыбы на приемный элемент, с одной стороны, заполняется свободное пространство под головой рыбы, а с другой стороны, голова рыбы поддерживается в определенном положении, что обеспечивает точную регистрацию и/ли определение соответствующих размеров.
Соответственно, рыба в зоне захватного средства также проходит на соответствующий приемный элемент таким образом, что ее голова в зоне захватного средства лежит в той же плоскости, что и в зоне измерительного средства.
Данный способ может быть выполнен особенно подходящим образом при помощи транспортировочной установки по одному из п.п. 1-21 формулы изобретения. Рыбообрабатывающая машина по одному из п.п. 22-26 подходит, в частности, для обезглавливания рыбы.
Дополнительные предпочтительные и/или преимущественные особенности и усовершенствования, а также предпочтительные этапы технологического процесса следуют из зависимых пунктов формулы изобретения и описания. Особенно предпочтительные варианты выполнения транспортировочной установки и рыбообрабатывающей машины, в дополнение к способу, более подробно объяснены со ссылкой на прилагаемые чертежи. На чертежах:
фиг. 1 изображает схематический вид спереди первого варианта выполнения транспортировочной установки в соответствии с изобретением,
фиг. 2 изображает схематический и упрощенный вид спереди другого варианта выполнения транспортировочной установки в соответствии с изобретением,
фиг. 3 изображает схематический вид сверху транспортировочной установки в соответствии с фиг. 1,
фиг. 4 изображает схематический вид сбоку транспортировочной установки в соответствии с фиг. 1 (если смотреть в направлении Т транспортировки),
фиг. 5 изображает упрощенный вид секции I конвейерной ленты с измерительным средством,
фиг. 6 изображает вид в аксонометрии транспортировочной установки и, в частности, секции II конвейерной ленты при регулировании высоты конвейерной ленты,
фиг. 7 изображает увеличенный вид захватного средства в положении высвобождения,
фиг. 8 изображает увеличенный вид захватного средства в положении удерживания,
фиг. 9 изображает схематический увеличенный вид приемных элементов,
фиг. 10 изображает схематический вид спереди рыбообрабатывающей машины с первым вариантом выполнения транспортировочной установки в соответствии с изобретением.
Транспортировочная установка, изображенная на чертеже, используется для изменения положения умерщвленного лосося со вскрытыми брюшными полостями с горизонтального на подвешенное во время транспортировки рыбы вперед брюшком в направлении Т транспортирования. Разумеется, транспортировочная установка согласно изобретению также спроектирована и выполнена с возможностью переноса рыбы, транспортируемой горизонтально вперед спинкой. Изобретение также аналогичным образом относится к транспортировочным установкам, при помощи которых рыба других лососевых пород, а также рыба в целом, умерщвленная или не умерщвленная, может быть перенесена из горизонтального положения в подвешенное.
Транспортировочная установка 10, изображенная на фиг. 1, спроектирована и выполнена с возможностью транспортировки рыбы поперечно ее продольной протяженности в направлении Т транспортирования и содержит конвейерное устройство 11 для транспортировки отдельных разделенных рыб в лежачем положении вдоль тракта TL транспортирования из загрузочной зоны Е конвейерного устройства 11 к его разгрузочной зоне А, при этом конвейерное устройство 11 содержит транспортирующий элемент 12, приводимый в действие с возможностью вращения. Как указано выше, транспортировка рыбы в лежачем положении может происходить вперед спинкой или брюшком. На транспортирующем элементе может лежать одна рыба или лежать вместе несколько рыб, но раздельно и с разнесением.
Транспортировочная установка 10 согласно изобретению характеризуется тем, что конвейерному устройству 11 соответствует переходное устройство 13, которое спроектировано и выполнено с конвейерным устройством 11 и функционально соединено с ним так, что рыба может быть автоматически перенесена из горизонтального положения на тракте TL конвейерного устройства 11 в подвешенное положение на тракт TH переходного устройства 13. Функциональное соединение характеризует взаимодействие между конвейерным устройством 11, предназначенным для горизонтальной подачи рыбы, и переходным устройством 13, предназначенным для переноса рыбы из лежачего положения в подвешенное положение, таким образом, что расположение и назначение конвейерного устройства 11 и переходного устройства 13 относительно друг друга обеспечивают контакт переходного устройства 13 с рыбой без столкновения и с последующей возможностью захвата рыбы и ее переноса в вертикальное положение.
Взятые по отдельности или в комбинации друг с другом, особенности и усовершенствования, а также этапы технологического процесса, описанные ниже, иллюстрируют предпочтительные варианты выполнения. Следует особо подчеркнуть, что особенности и этапы технологического процесса, кратко изложенные в формуле изобретения, и/или в описании, и/или на чертежах, или описанные для типичного варианта выполнения, также могут обеспечить дополнительное усовершенствование вышеописанной транспортировочной установки 10, а также нижеописанного способа, функционально независимым образом.
Транспортирующий элемент 12 может представлять собой конвейерную ленту, приводимую в действие с возможностью вращения, или транспортирующую цепь, на которой рыбы лежат отдельно друг от друга, при этом их голова направлена к боковому краю элемента 12 так, что рыба может транспортироваться поперечно ее продольной протяженности, предпочтительно вперед брюшком, в направлении Т транспортирования. Элемент 12 соединен с по меньшей мере одним приводом, не показанным явно на чертежах, для приведения в действие непрерывного транспортирующего элемента 12 с возможностью вращения, при этом элемент 12 выполнен с возможностью приведения в действие периодическим или предпочтительно непрерывным образом и с регулируемой скоростью. Конвейерное устройство 11 для транспортировки рыбы в лежачем положении и переходное устройство 13 для переноса рыбы из лежачего положения в подвешенное положение расположены относительно друг друга таким образом, что имеется по меньшей мере одна зона, в которой устройство 11 и устройство 13 могут взаимодействовать.
Как вариант, переходное устройство 13 содержит подвесное конвейерное устройство 14, расположенное над устройством 11 для транспортировки рыбы в лежачем положении и предназначенное для транспортировки рыбы, подвешенной вдоль тракта TH, а также средство 15 для переноса рыбы, а именно для удаления рыбы из устройства 11, предназначенного для транспортировки рыбы в лежачем положении, и для удерживания рыбы во время транспортировки в подвешенном состоянии вдоль тракта TH. Другими словами, подвесное устройство 14 расположено на расстоянии от плоскости EH устройства 11 в направлении вертикально вверх так, что средство 15 для переноса рыбы, соединенное с подвесным устройством 14, может перемещаться без столкновения над устройством 11 для переноса рыбы.
Подвесное устройство 14 и устройство 11 образуют зону перекрытия для переноса рыбы, т.е. зону, в которой подвесное устройство 14 и конвейерное устройство 11 расположены одно над другим параллельно друг другу. Свободное пространство устройства 11, условно говоря, ограничено сверху подвесным устройством 14. Однако предпочтительно подвесное устройство 14 начинается на расстоянии от загрузочной зоны Е устройства 11, если смотреть в направлении Т транспортирования. Другими словами, область над загрузочной зоной Е конвейерного устройства И является свободной. Начиная от местоположения на расстоянии от загрузочной зоны Е устройства 11, подвесное устройство 14 проходит по меньшей мере до разгрузочной зоны А устройства 11. Подвесное устройство 14 предпочтительно проходит за пределы устройства 11 в направлении Т, при этом переходная область для перехода рыбы из устройства 11 к подвесному устройству 14 образована в зоне перекрытия устройства 11 и подвесного устройства 14 в направлении Т перед разгрузочной зоной А устройства 11. В переходной области тракт TL совпадает с трактом TH и линейно продолжает его в направлении Т. За разгрузочной зоной А устройства 11 область под подвесным устройством 14 является свободной.
Подвесное конвейерное устройство 14 предпочтительно содержит транспортирующий элемент 16, который приводится в действие с возможностью вращения и на котором расположено средство 15 для удаления и удерживания рыбы. Транспортирующий элемент 16 соединен с по меньшей мере одним приводом, не показанным на чертежах, для приведения непрерывного транспортирующего элемента 16 в действие с возможностью вращения, при этом элемент 16 выполнен с возможностью приведения в действие периодическим или предпочтительно непрерывным образом и с регулируемой скоростью. Транспортирующий элемент 16 может представлять собой транспортерную ленту, конвейерную ленту и т.п. Элемент 16 предпочтительно выполнен в виде одиночной или сдвоенной транспортирующей цепи и направляется вокруг отклоняющей и/или приводной рабочей части 17. В предпочтительном варианте выполнения имеются две отклоняющие и/или приводные рабочие части 17, например, в виде роликов, зубчатых колес и т.п. Центральные оси и/или оси R1 вращения отклоняющих и/или приводных частей 17 расположены горизонтально и поперечно направлению Т транспортирования. Таким образом, средство 15 для удаления и удерживания рыбы перемещается в вертикальной плоскости EV. Другими словами, средство 15 свисает вниз в качестве ветви транспортирования на нижней ветви 18 транспортирующего элемента 16 в направлении конвейерного устройства 11 и проходит вертикально вверх в качестве холостой ветви на верхней ветви 19 элемента 16. В зоне отклоняющих и/или приводных частей 17 средство 15 следует по радиусу указанных частей 17, при этом в начале переходной области оно перемещается в направлении конвейерного устройства 11 на конце, обращенном к загрузочной зоне Е устройства 11, и в направлении вверх у противоположного конца. В переходной области средство 15 расположено на наименьшем расстоянии от транспортирующего элемента 12 устройства 11.
Средство 15 для удаления и удерживания рыбы содержит захватные средства 20, вращающиеся вместе с транспортирующим элементом 16 подвесного конвейерного устройства 14, причем каждое захватное средство содержит два захватных элемента 21, 22, при этом по меньшей мере один захватный элемент 21 или 22 выполнен с по меньшей мере одной иглой 23, 29, направленной к захватываемой рыбе. Захватные элементы 21, 22 образуют клещеобразный инструмент. Для этого первый захватный элемент содержит захватный рычаг 24, на свободном конце которого имеется жесткая игольчатая рабочая часть 27, закрепленная с предотвращением кручения, а второй захватный элемент 22 содержит захватный рычаг 26, на свободном конце которого расположена игольчатая рабочая часть 25, поддерживаемая с возможностью поворота. Указанные два захватных рычага 24, 26 спроектированы и выполнены с возможностью автоматического перемещения по направлению друг к другу в положение удерживания и друг от друга в положение высвобождения, и наоборот, в вертикальной плоскости EV. В данном случае центральные оси и/или оси М поворота игольчатых частей 25, 27 в положении удерживания расположены горизонтально и параллельно направлению Т транспортирования. Каждый захватный элемент 21, 22 имеет L-образную форму. Каждый захватный рычаг 24, 26 образует длинную ножку указанных букв «L», тогда как игольчатые части 25, 27 образуют короткую ножку. Игольчатые части 25, 27 расположены в плоскости EV и направлены друг к другу.
Захватные рычаги 24, 26 соединены с по меньшей мере одним приводом и/или исполнительным механизмом, не показанным явно на чертежах, для выполнения поворотного перемещения. Оба рычага 24, 26 также могут быть соединены с общим приводом и/или исполнительным механизмом. Однако предпочтительно два рычага 24, 26 выполнены с возможностью их регулирования по отдельности, например, с помощью пневматического цилиндра и т.п. Приводы и/или исполнительные механизмы для захватных рычагов 24, 26 предпочтительно выполнены с возможностью регулирования, в частности, в отношении скорости поворотного перемещения, с одной стороны, и степени/угла раскрытия и закрытия захватных рычагов относительно друг друга, с другой стороны. Поворотное перемещение также может регулироваться кулачковым механизмом. Вместо зажимного механизма, образованного захватными рычагами 24, 26, также могут использоваться другие захватные средства 20, например, в виде зажимных губок и т.п. Предпочтительно имеется несколько зажимных средств 20, которые распределены вдоль транспортирующей цепи равномерно, т.е. на одинаковом расстоянии друг от друга. Каждое из этих захватных средств 20 проходит через переходную область при его приведении в действие с возможностью вращения при помощи транспортирующей цепи. Кроме того, захватное средство может содержать жесткий рычаг в качестве упора для подвижного захватного рычага.
В предпочтительном варианте выполнения первая игольчатая часть 25 первого захватного элемента 21 содержит иглу 23, полностью проходящую через голову рыбы и входящую во вторую игольчатую часть 27 в положении удерживания, ввиду чего вторая игольчатая часть 27 второго захватного элемента 22 имеет отверстие 28 для приема иглы 23 первой части 25, при этом вокруг указанного отверстия 28 второй части 27 расположены по меньшей мере две иглы 29, проникающие в голову. Вторая игольчатая часть 27 также может содержать три или боле игл 29, расположенных вокруг отверстия 28 концентрическим образом. В изображенной транспортировочной установке 10 первая часть 25 выполнена с одной иглой 23 и имеет жесткую конструкцию. Вторая часть 27 выполнена в виде поворотной втулки таким образом, что указанная втулка установлена на оси с возможностью поворота. Захватный рычаг 24 с жесткой игольчатой частью 25, как вариант, может быть присоединен к захватному средству 22, входящему во взаимодействие на брюшной стороне (на нижней челюсти), или предпочтительно к захватному средству 21, входящему во взаимодействие на спинной стороне (верхней челюсти). То же самое относится к захватному рычагу 26. В других вариантах выполнения игольчатые рабочие части 25, 27 также могут иметь другую конфигурацию.
Игла 23 жесткой части 25 предпочтительно выполнена по типу пустотелого бурава. Иглы 29 поворотной части 27 выполнены по типу шипов. Однако все иглы 23, 29 также могут иметь другие формы и конфигурации. Количество и конфигурации игл 23, 29 также могут изменяться. В вариантах, не показанных на чертежах, также могут быть выполнены две игольчатые рабочие части, которые установлены с возможностью поворота и каждая из которых имеет по меньшей мере две иглы, или две жесткие игольчатые рабочие части, каждая из которых имеет одну иглу. Иглы 23, 29 также могут иметь такую длину, при которой все они только проникают в голову, но не проходят сквозь нее. Вместо игольчатых частей 25, 27 также могут быть выполнены другие закрепляющие средства для зажатия, насаживания и т.п.
Предпочтительно в изображенном варианте выполнения в положении удерживания единственная центральная игла 23 первой, жесткой части 25 образует ось S поворота, расположенную горизонтально и параллельно направлению Т транспортирования для каждой рыбы, так что закрепленная рыба разворачивается вниз при выходе с транспортирующего элемента 12 устройства 11. Установка второй игольчатой части 27 с возможностью поворота обеспечивает поддержание данного процесса, при этом игла 23 первой, жесткой части 25 действует в качестве оси поворота.
В других вариантах выполнения подвесное конвейерное устройство 14 также может быть выполнено в виде так называемого карусельного конвейера (см., например, фиг. 2). Это означает, что транспортирующий элемент 16 с расположенным на нем средством 15 для удаления и удерживания рыбы может перемещаться в горизонтальной плоскости. В этом случае центральные оси и/или оси R1 вращения отклоняющих и/или приводных частей 17 расположены вертикально (см., например, фиг.2).
Транспортирующий элемент 12 конвейерного устройства 11, спроектированный и выполненный с возможностью транспортировки рыбы в положении лежа вперед брюшком или спинкой в направлении Т транспортирования, содержит конвейерную ленту 30, содержащую перегородки 31, проходящие поперечно направлению Т и перпендикулярно плоскости ЕН и вращающиеся вместе с лентой 30, для разделения указанной ленты 30 на отдельные секции, каждая из которых принимает одну рыбу, при этом перегородки 31 проходят в каждом случае лишь по части ширины ленты 30. Перегородки 31 постоянно присоединены к конвейерной ленте 30 цепного типа или выполнены за одно целое с ней и расположены по меньшей мере на одной стороне ленты 30, на которой должна быть размещена голова рыбы, с отнесением от наружного бокового края ленты 30. Перегородки 31 также могут быть прерваны иным образом и/или выполнены на обеих сторонах с зазором относительно наружного бокового края ленты 30. Перегородки 31, также называемые планками, образуют упор для брюшной стороны или предпочтительно спинной стороны рыбы в направлении, поперечном направлению Т транспортирования.
Предпочтительно по меньшей мере на одной стороне в направлении Т к ленте 30 присоединен закрепленный упорный элемент 32 для размещения каждой рыбы в ее продольном расположении поперечно направлению Т транспортирования, причем указанный элемент 32 спроектирован и выполнен с возможностью расположения головы рыбы в определенном положении. Упорный элемент 32 может представлять собой, например, полосу, которая может быть установлена над лентой 30, с возможностью скольжения и предпочтительно бесконтактно, на неподвижной раме/стойке 33 транспортировочной установки 10, на которой также может быть расположено подвесное устройство 14, так что лента 30 может перемещаться под указанной полосой. Полоса проходит на одной стороне вдоль ленты 30 по меньшей мере частично из загрузочной зоны Е до разгрузочной зоны А и образует упорную поверхность для головы рыбы так, что при введении вручную или автоматически рыба опирается спинкой на перегородку 31, а передним кончиком рта - на упорный элемент 32. Таким образом, имеется возможность размещения рыбы на ленте 30 в определенном положении. Между упорным элементом 32 и перегородками 31, расположенными перпендикулярно к нему, имеется зазор, обусловленный укороченной конструкцией перегородок 31, поперечных направлению Т транспортирования, так что на боковом крае, где расположен упорный элемент, образован проход, в котором происходит транспортировка головы из загрузочной зоны Е к разгрузочной зоне А.
Конвейерная лента 30, которая образована верхней ветвью 34 в качестве ветви транспортирования и нижней ветвью 35 в качестве холостой ветви, направляется вокруг по меньшей мере трех отклоняющих и/или приводных рабочих частей 36, центральные оси и/или оси R2 вращения которых расположены горизонтально и поперечно направлению Т транспортирования. Верхняя ветвь 34 может быть на всем протяжении ориентирована горизонтально с образованием плоскости ЕН транспортирования. Однако верхняя ветвь 34 предпочтительно выполнена ступенчатой. Верхняя ветвь 34 содержит первую секцию I, проходящую в плоскости EH1 транспортирования, и вторую секцию II, следующую за ней в направлении Т и проходящую в плоскости EH2, причем плоскость EH2 расположена выше плоскости EH1, так что конвейерная лента 30 транспортирует рыбу по наклонной траектории от плоскости EH1 к плоскости EH2 через соединительную секцию III. Одна из трех отклоняющих и/или приводных рабочих частей 36, например отклоняющих роликов и т.п., расположена в загрузочной зоне Е, другая - в разгрузочной зоне А, а третья - между наружными отклоняющими и/или приводными частями 36 приблизительно в зоне отклоняющей и/или приводной части 17 подвесного конвейерного устройства 14, расположенного над устройством 11. В переходной области ленты 30, проходящей от плоскости EH1 до плоскости EH2, в начале наклонной траектории в качестве отклоняющего элемента расположен прижим 37, с помощью которого лента 30 удерживается, условно говоря, в заданном тракте. Прижим 37 предпочтительно входит во взаимодействие только с наружными боковыми краями ленты 30 сверху. Плоскость ЕН2 транспортирования также образует переходную область для рыбы.
Конвейерная лента 30, как вариант, выполнена с возможностью регулирования высоты по меньшей мере в переходной области. Для этого секция II ленты 30, проходящая в плоскости EH2, может быть выполнена, например, с возможностью ее поворота при помощи привода 40 вокруг оси С поворота, проходящей горизонтально и поперечно направлению Т транспортирования. Ось С предпочтительно совпадает с центральной осью и/или осью R2 вращения центральной отклоняющей и/или приводной части 36 ленты 30 устройства 11. Для этого предусмотрен поворотный механизм 38. В изображенном варианте выполнения поворотный механизм 38 содержит подъемный стержень 39 и привод 40 для управления стержнем 39. Стержень 39 входит во взаимодействие в разгрузочной зоне А транспортирующего элемента 12 так, что секция II имеет возможность поворота вверх и вниз вокруг оси С для изменения расстояния от секции II до элемента 16 подвесного устройства 14 и, соответственно, до захватного средства 20.
В предпочтительном варианте выполнения транспортировочная установка 10 содержит по меньшей мере одно измерительное средство 41 для регистрации и/или определения данных о размерах рыбы, в частности, для определения толщины головы в направлении, перпендикулярном плоскости EH, и ширины головы в плоскости EH в направлении Т транспортирования. В изображенном примере измерительное средство расположено до переходной области в направлении Т транспортирования. Измерительное средство 41 может быть механическим, электромеханическим, электронным, оптическим или может быть выполнено любым другим образом с обеспечением возможности определения, выявления, регистрации или вычисления высоты головы по вертикали относительно плоскости Е и/или ширины головы по горизонтали в направлении Т. Предпочтительно средство 41 закреплено над конвейерным устройством 11 и содержит мерную лопатку 42, выполненную и расположенную с возможностью ее отклонения головой рыбы. Лопатка 42 расположена поперечно направлению Т транспортирования с зазором относительно упорного элемента 32. Другими словами, лопатка 42 выступает в проход, образованный между элементом 32 и перегородками 31, так, что она неизбежно отклоняется рыбой, транспортируемой вдоль тракта TL. Информация, необходимая для определения высоты и ширины головы, может быть получена на основании указанного отклонения, например, с помощью датчика угла. Зазор выбран так, что с помощью лопатки 42 могут быть обмерены рыбы с различными размерами. Величина зазора может составлять, например, 15-40 мм, особенно предпочтительно приблизительно 30 мм.
Предпочтительно в зоне измерительного средства 41, а именно непосредственно под средством 41, на упорном элементе 32 расположен закрепленный приемный элемент 43, спроектированный и выполненный с возможностью приема головы рыбы таким образом, что верхняя поверхность скольжения приемного элемента 43, направленная к измерительному средству 41 и ориентированная параллельно плоскости ЕН1, образует отсчетную плоскость для средства 41 при определении толщины головы рыбы и положения оси симметрии головы рыбы. Приемный элемент 43 обеспечивает поддержание головы рыбы во время измерения, заполняя свободный промежуток, имеющийся под головой рыбы вследствие ее анатомических особенностей. Измерительное средство 41 в этом варианте откалибровано для определения расстояния от указанной верхней поверхности скольжения до наивысшей точки головы рыбы. Приемный элемент 43 предпочтительно прикреплен с возможностью отсоединения к упорному элементу 32 и на начальном участке имеет пологий наклон в направлении Т транспортирования, который переходит в горизонтальную поверхность скольжения. Нижняя сторона элемента 43 расположена параллельно конвейерной ленте 30 и имеет низкий коэффициент трения или, что еще лучше, свободна от трения, вследствие чего она предпочтительно расположена на малом расстоянии от конвейерной ленты 30, так что лента 30 может перемещаться под приемным элементом 43. Начинаясь от упорного элемента 32, приемный элемент 43 проходит поперечно направлению Т транспортирования к центру конвейерной ленты, то есть предпочтительно на расстояние, соответствующее ожидаемой зоне расположения голов рыб. В любом случае описанная ширина приемного элемента 43 в направлении центра ленты 30 меньше расстояния между упорным элементом 32 и перегородками 31 ленты 30 (см., например, фиг. 5).
Особенно предпочтительно на упорном элементе 32 в переходной области также закреплен приемный элемент 44, спроектированный и выполненный с возможностью приема головы рыбы, при этом два приемных элемента 43, 44 выполнены одинаковыми с точки зрения их высоты, начиная от поверхности конвейерной ленты 30 и до верхней поверхности скольжения элемента 43, 44, так что положение оси симметрии головы рыбы, определяемое измерительным средством 41, является воспроизводимым в переходной области. Оба приемных элемента 43, 44 выполнены с соответствующей геометрией, являются одинаковыми с точки зрения их размеров и соответственно расположены в различных местоположениях вдоль тракта TL в соответствии с упорным элементом 32 и конвейерной лентой 30.
Особенно предпочтительно транспортировочная установка 10 содержит устройство 45 управления, к которому присоединены указанный или каждый привод для конвейерной ленты 30 конвейерного устройства 11, и/или указанный или каждый привод 40 для регулирования высоты ленты 30 устройства 11, и/или измерительное средство 41. В этом случае все этапы позиционирования и ориентирования рыб для их оптимального захвата по оси симметрии могут быть выполнены с помощью устройства 11. В показанных вариантах выполнения подвесное конвейерное устройство 14 соответственно закреплено с точки зрения его положения. Другими словами, захватные средства 20 всегда проходят вдоль одного и того же тракта. Для изменения расстояния между транспортирующей цепью подвесного устройства 14 или захватными средствами 20, с одной стороны, и конвейерной лентой 30 устройства 11, с другой стороны, в частности в переходной области, нижняя ветвь 18 транспортирующего элемента 16, как вариант, например, также может быть выполнена с возможностью регулирования по высоте. Кроме того, захватные средства 20 могут быть выполнены с возможностью регулирования расстояния от них до ленты 30.
Для этого к устройству 45 управления могут быть присоединены возможные регулировочные приводы, исполнительные механизмы, регулировочные цилиндры и т.п., а также приводы для транспортирующего элемента 16.
Как указано выше, расстояние от мерной лопатки 42 до упорного элемента 32 определяется в направлении, поперечном направлению Т транспортирования. Предпочтительно расстояние от измерительного средства 41 или лопатки 42 до элемента 32 в направлении, поперечном направлению Т, т.е. точка измерения, в которой лопатка 42 входит к контакт со стороной нижней челюсти головы рыбы, соответствует расстоянию от центральной оси и/или оси М поворота игольчатых частей 25, 27 в положении удерживания до упорного элемента 32 в направлении, поперечном направлению Т. Другими словами, игольчатые части 25, 27 расположены и ориентированы таким образом относительно рычага 24, 26 и на таком расстоянии от упорного элемента 32, что центральная игла 23 жесткой части 25 расположена точно в зоне точки измерения, при этом «нахождение» точного положения точки измерения обеспечивается путем регулировки высоты переходной области и/или регулировок скорости ленты 30 с помощью устройства 45 управления.
В предпочтительном варианте предусмотрен ударный элемент 46, который направлен по существу вертикально вниз от плоскости EH2, ударная поверхность которого ориентирована в направлении подвешенной рыбы и который расположен в направлении Т транспортирования за конвейерным устройством 11 для горизонтальной транспортировки рыбы вдоль тракта TH подвесного устройства 14. Предпочтительно имеется один ударный элемент 46, например, в виде простой ударной пластины или ударной части, установленной с противодействием усилию пружины. Плоскость EP, в которой проходит ударный элемент 46 или его ударная поверхность, приблизительно параллельна вертикальной плоскости EV, заданной подвесным устройством 14 или его поворотными захватными средствами 20, и приблизительно перпендикулярна плоскости EH, так что рыба, выходящая с конвейерной ленты 30 устройства 11 и подвешиваемая на подвесном устройстве 14, разворачивается вниз вокруг оси S поворота и соударяется с элементом 46 боковой частью, которой она лежала на ленте 30, при этом ее ось симметрии ориентирована приблизительно вертикально.
В варианте выполнения, не показанном на чертежах, также может использоваться центрирующий механизм для позиционирования рыбы вместо измерительного средства 41 и приемного элемента 43, 44, с одной стороны, и для регулирования конвейерной ленты 30, с другой стороны. Этот центрирующий механизм содержит два позиционирующих элемента, которые выполнены с возможностью перемещения по направлению друг к другу и друг от друга. Указанные два элемента выполнены с возможностью перемещения в воображаемой плоскости, которую не следует понимать как математическую плоскость и которая расположена перпендикулярно плоскости EH и проходит в направлении Т транспортирования. Каждый позиционирующий элемент имеет приблизительно треугольное углубление или, точнее, углубление, соответствующее контуру голов рыбы. Один из позиционирующих элементов выполнен с возможностью взаимодействия с головой рыбы на брюшной стороне, а другой позиционирующий элемент выполнен с возможностью взаимодействия с головой рыбы на спинной стороне. Поскольку два позиционирующих элемента расположены со смещением относительно друг друга в направлении, поперечном направлению транспортирования, при их перемещении по направлению друг к другу указанное углубление образует подобие параллелограмма, который уменьшается в размере, в результате чего рыба переносится в определенное положение независимо от ее размера. Границы углублений, имеющие острые кромки, оказывают дополнительное содействие в позиционировании рыбы в продольном направлении. Как только рыба оказывается в центрированном положении и закрепляется, начинают использоваться вышеописанные захватные средства 20. Вариант выполнения и функциональная возможность захватных средств 20 являются эквивалентными.
Транспортировочная установка 10 может быть выполнена в виде независимой установки, в частности также в виде модернизированного блока. Однако предпочтительно установка 10 является частью рыбообрабатывающей машины 47 (см., например, фиг. 10). Такая рыбообрабатывающая машина 47 содержит транспортировочную установку 10 для транспортирования рыбы в зону рыбообрабатывающей установки 48 и по меньшей мере одну рыбообрабатывающую установку 48. Установка 10 предпочтительно спроектирована и выполнена в соответствии с одним или более из пунктов 1-21 формулы изобретения, а указанная или каждая установка 48 расположена в зоне, в которой рыба находится в подвешенном положении. Другими словами, транспортировочная установка 10 выполнена так, как подробно описано выше. Вследствие того, что рыбообрабатывающая установка 48 расположена в зоне подвешенной рыбы, при достижении установки 48 рыба, находящаяся в перпендикулярном положении с вертикально расположенной осью симметрии, может быть обработана оптимальным образом. Это положение, в частности, является важным для обезглавливания уже умерщвленной рыбы.
Рыбообрабатывающая машина 47 предпочтительно спроектирована и выполнена с возможностью обезглавливания не умерщвленных и/или умерщвленных рыб со вскрытыми брюшными полостями, при этом рыбообрабатывающая установка 48 вдоль тракта TH транспортирования подвесного конвейерного устройства 14 спроектирована и выполнена в виде обезглавливающего аппарата 49. Этот обезглавливающий аппарат 49 содержит отделяющее устройство 50, предназначенное для отделения тушки рыбы, подвешенной за голову, и содержащее по меньшей мере пару дисковых ножей 51, 52, приводимых в действие с возможностью вращения, причем дисковые ножи 51, 52 расположены с V-образной формой относительно друг друга на противоположных сторонах тракта TH. Предпочтительно предусмотрена вторая пара дисковых ножей 51.1, 52.1, приводимых в действие с возможностью вращения. Ножи 51, 52, которые предпочтительно спроектированы и выполнены с возможностью так называемого обезглавливания резанием, предпочтительно могут быть отрегулированы в пределах нескольких степеней свободы. Ножи 51.1, 52.1, которые предпочтительно спроектированы и выполнены с возможностью окончательного отделения тушки от головы, выполнены по меньшей мере с возможностью регулирования по высоте.
Предпочтительно за конвейерным устройством 11 и перед обезглавливающим аппаратом 49 в направлении Т транспортирования в тракте TH подвесного устройства 14 расположено измерительное средство 53 для выявления и/или определения местоположения ключиц каждой подвешенной рыбы. Измерительное средство 53 также расположено за ударным элементом 46 в направлении Т транспортирования и спроектировано и выполнено с возможностью сканирования рыбы с двух боковых сторон, т.е. на обеих боковых поверхностей. Для этого в предпочтительном варианте выполнения средство 53 содержит два подпружиненных сканирующих рычага, которые выполнены с возможностью перемещения в направлении Т и одновременно наклонно вниз на общем ползуне или отдельных ползунах таким образом, что они выполнены, с одной стороны, с возможностью синхронной работы, а с другой стороны, с возможностью сканирования рыбы сверху донизу. Для этого указанный или каждый ползун выполнен с возможностью приведения в движение при помощи линейного привода наклонно вниз вдоль направляющих от верхнего исходного положения и обратно. В другом предпочтительном варианте выполнения (см., например, фиг. 10) измерительное средство 53 выполнено в виде оптического измерительного средства. Кроме того, за конвейерным устройством 11 и перед рыбообрабатывающей установкой 48 может быть расположено средство для поворота подвешенной рыбы, предпочтительно на 90°, таким образом, что подвешенная рыба попадает на рыбообрабатывающую установку 48 боком, т.е. вперед «челюстью».
Усовершенствованный вариант рыбообрабатывающей машины 47 предусматривает наличие средства 54 для захвата грудных плавников, расположенного в направлении Т транспортирования за устройством 11 для горизонтальной транспортировки рыбы и перед обезглавливающим аппаратом 49 в тракте TH транспортирования подвесного устройства 14. Это средство 54, расположенное в направлении транспортирования после средства 53, используется главным образом для обеспечения устойчивого подвешенного положения рыбы с оставлением свободной зоны резания для дисковых ножей 51, 52. Как вариант, рыбообрабатывающая машина 47 может содержать транспортировочные конвейеры, предназначенные для убирания тушек, отделенных от головы, и/или убирания голов, освобожденных из захвата средств 20. В дополнение к обезглавливающему аппарату 49 может быть предусмотрена дополнительная рыбообрабатывающая установка 48. Как вариант, на фиг. 10 изображены дополнительные компоненты, такие как дисковый нож 55 с регулируемой высотой, предназначенный для отделения хвостового плавника. Кроме того, в зоне указанной или каждой рыбообрабатывающей установки 48 может быть расположено средство 56 для удерживания тушки рыбы, в частности, во время процесса отделения. Это средство 56, как вариант, содержит две цепи, которые приводятся в действие с возможностью вращения и могут быть введены в функциональное взаимодействие с тушкой рыбы. Как показано на фиг. 10, все приводные, транспортирующие, измерительные или обрабатывающие компоненты могут быть присоединены к центральному устройству 45 управления. Также имеется возможность присоединения к устройству 45 управления лишь отдельных компонентов. Как вариант, также может быть выполнено несколько отдельных устройств управления, согласованных друг с другом.
Ниже приведено более подробное описание способа изменения положения рыбы. Сначала рыбу по отдельности укладывают на транспортирующем элементе 12, приводимом в действие с возможностью вращения и входящем в состав конвейерного устройства 11 для транспортировки рыбы в лежачем положении вдоль тракта TL и транспортировки рыбы вдоль тракта TL из загрузочной зоны Е к разгрузочной зоне А конвейерного устройства 11.
Согласно изобретению данный способ характеризуется тем, что рыбу переносят автоматически из лежачего положения в подвешенное положение при помощи переходного устройства 13, при этом рыбу захватывают конвейерным устройством 11 с использованием переходного устройства 13 вдоль тракта TL и переводят в подвешенное положение во время ее транспортировки вдоль тракта TH. Таким образом, рыба, расположенная на транспортирующем элементе 12 и уже ориентированная в ее продольном направлении во время ручного или автоматического размещения, проходит через конвейерное устройство 11 вдоль тракта TL, после чего рыбу захватывают с помощью переходного устройства 13 во время прохождения через него так, что при дальнейшей транспортировке рыба соскальзывает с элемента 12, однако удерживается устройством 13 и транспортируется дальше вдоль тракта TH. Для осуществления перехода указанные два тракта TL и TH транспортирования проходят частично параллельно и расположены в плоскости один над другим так, что переходное устройство 13 и конвейерное устройство 11 по меньшей мере временно могут входить в функциональное соединение друг с другом. Проще говоря, участки обоих трактов TL и TH описывают одну и ту же траекторию для обеспечения перехода.
Предпочтительно рыбу транспортируют вперед брюшком в направлении Т, при этом спинка расположена на перегородках 31, проходящих поперечно направлению Т конвейерной ленты 30 транспортирующего элемента 12, а голова опирается на упорный элемент 32, присоединенный к ленте 30. Как вариант, рыба также может транспортироваться вперед спинкой, при этом брюшко опирается на перегородку 31. Во время транспортирования в направлении Т рыба на элементе 12 проходит через измерительную установку. Данные о размерах рыбы, в частности толщине головы в направлении, перпендикулярном плоскости EH, в которой проходит лента 30, и/или ширине головы в плоскости EH в направлении Т, регистрируют и/или определяют в секции I конвейерной ленты с помощью измерительного средства 41. Указанные регистрация и определение также включают идентификацию, вычисление или любой другой вид оценки. Толщина головы может быть измерена полностью, т.е. от боковины до боковины головы рыбы, или начиная от нижней отсчетной плоскости, например от поверхности ленты 30 или (см. ниже) поверхности приемного элемента 43 до наивысшей точки головы рыбы. Вместо ширины головы от наружной части нижней челюсти до наружной части верхней челюсти также может быть определено расстояние от передней стороны головы (в предпочтительном примере от наружной части нижней челюсти) до перегородки 31, на которую опирается рыба. Если известна толщина головы рыбы, может быть соответственно определено положение оси симметрии или центральной линия головы.
Эти данные/информация предпочтительно могут быть сохранены с возможностью присвоения данных/информации каждой рыбе. Для этого устройство 45 управления может содержать запоминающее средство. В зависимости от зарегистрированных и/или определенных измеряемых величин конвейерную ленту 30 перемещают в зону захватных средств 20.
Более конкретно, рыбу подают в секцию II ленты 30 к захватному средству 20, которое захватывает рыбу за голову. Для этого положение головы в направлении, перпендикулярном захватному средству 20, регулируют путем регулирования высоты секции II ленты 30 в зависимости от данных, зарегистрированных и/или определенных измерительным средством 41. Например, секцию II поворачивают относительно оси для изменения расстояния от ленты 30 до захватного средства 20 так, что в зоне захватного средства 20 голова рыбы расположена в оптимальном и предварительно определенном положении относительно средств 20, т.е. в той же плоскости, что и в зоне измерительного средства 41. Другими словами, рыба с ее головой приподнята или опущена для нанесения захватными средствами 20 точного удара по предварительно определенной центральной линии головы рыбы.
Для захвата головы рыбы за нижнюю челюсть на брюшной стороне и за верхнюю челюсть на спинной стороне в голову рыбы в каждом случае проникает одна игольчатая рабочая часть 25, 27 в результате перемещения двух захватных рычагов 24, 26 захватных средств 20, на которых расположены указанные части 25, 27, из положения высвобождения к положению удерживания. Вместо игольчатых частей 25, 27 также могут использоваться другие зажимные или удерживающие элементы для надежного закрепления рыбы за голову. После выполнения данного закрепления рыбы с подгонкой по форме и усилию в переходной области между подвесным конвейерным средством 14 и конвейерным средством 11 дальнейшая транспортировка закрепленной рыбы в направлении Т транспортирования вследствие отклонения конвейерной ленты 30 от верхней ветви 34 к нижней ветви 35 приводит к тому, что рыба разворачивается вниз. Каждое захватное средство 20 транспортируется вдоль подвесного устройства 14 переходного устройства 13 в плоскости EV, которая расположена перпендикулярно плоскости EH, за пределы тракта TL конвейерного устройства 11 вдоль тракта TH так, что захваченная за голову рыба поворачивается в подвешенное положение после выхода из устройства 11. Ударный элемент 46 может замедлить поворот или разворот рыбы.
Чтобы в каждом случае ввести рыбу без столкновения и точно между разведенными захватными рычагами 24, 26, опускающимися в направлении конвейерной ленты 30, во время транспортировки вдоль тракта TL из секции I в секцию II ленты 30 рыбу располагают снизу между рычагами 24, 26, находящимися в положении высвобождения, при этом указанные захватные рычаги перемещаются сверху в вертикальной плоскости EV в направлении ленты 30. Другими словами, рыба, подлежащая закреплению, и соответствующие захватные средства 20 сходятся в переходной области, образованной в секции II, таким образом, что переходное устройство 13 может взаимодействовать с конвейерным устройством 11 и транспортируемой на нем рыбой при помощи захватных рычагов 24, 26 и расположенных на них игольчатых частей 25, 27. Однако рыба также может подаваться в переходную область горизонтально. В этом случае захватные рычаги 24, 26 предпочтительно разведены еще больше, например, на угол 180°.
Как указано выше, захват может быть выполнен зажимными губками, зажимными элементами и т.п. Особенно надежное удерживание достигается в случае, если рычаги 24, 26, расположенные в переходной области на нижней ветви 16 подвесного устройства 14 и, следовательно, над верхней ветвью 34 устройства 11, перемещаются по направлению друг к другу в вертикальной плоскости EV так, что жесткая игольчатая часть 25 с одной иглой 23 полностью проходит сквозь голову рыбы со спинной стороны, в то время как вторая игольчатая часть 27, поддерживаемая с возможностью поворота и выполненная с по меньшей мере двумя иглами 29, проникает в голову с брюшной стороны. Вследствие того, что иглы 23, 29 проникают в голову рыбы или проходят сквозь нее с обеих сторон, голова удерживается надежным образом и безошибочно/точно в требуемом положении.
Возможен вариант, при котором скорость транспортирования может регулироваться в зависимости от зарегистрированных и/или определенных данных, в частности ширины головы рыбы в плоскости EH в направлении Т, когда рыба расположена в зоне захватного средства 20, таким образом, что поворотная игольчатая часть 27 с указанными по меньшей мере двумя иглами 29 входит в контакт с головой рыбы в то же время, что и жесткая игольчатая часть 25, или раньше по времени. Скорость конвейерной ленты 30 предпочтительно на короткое время уменьшают так, что поворотная игольчатая часть 27 проникает в голову рыбы, действуя в качестве упора, прежде чем жесткая часть 25 проколет черепную пластинку головы рыбы и другие тканевые и костные компоненты. После этого скорость транспортирования восстанавливают до прежней величины. Как вариант, скорость транспортирования также может быть на короткое время увеличена. При полном прохождении иглы 23 сквозь голову рыбы возникают значительные усилия, которые поглощаются поворотной частью 27 так, что ориентированное положение рыбы сохраняется во время закрепления. Однако указанные две части 25, 27 также могут проникать в голову рыбы одновременно.
В другом варианте выполнения скорость конвейерной ленты 30 может изменяться, когда рыба расположена в разгрузочной зоне А конвейерного устройства 11, таким образом, что предотвращается столкновение конвейерной ленты 30 или расположенных на ней перегородок 31 с разворачивающейся рыбой. Скорость ленты 30 предпочтительно на короткое время уменьшают для обеспечения возможности разворота рыбы вниз без столкновения. Поскольку, например, в зоне захватного средства 20 расположена другая рыба, в то время как первая рыба разворачивается вниз, изменения скорости транспортирования при захвате рыбы, с одной стороны, и при развороте рыбы вниз, с другой стороны, должны быть согласованы друг с другом. Это достигается путем секционирования конвейерной ленты 30, т.е. разнесения перегородок 31 и, соответственно, рыбы, расположенной на транспортирующем элементе 12.
В особенно предпочтительном варианте рыба проходит головой на приемный элемент 43 для регистрации и/или определения данных о ее размерах таким образом, что голова рыбы возвышается относительно плоскости EH транспортирования. В то время как рыбы транспортируются вдоль тракта TL и их головы скользят вдоль прохода, образованного упорным элементом 32 и перегородками 31, головы рыб проходят под измерительным средством 41 по пологому наклону на верхнюю поверхность скольжения приемного элемента 43 так, что достигается определенное и воспроизводимое положение головы рыбы относительно измерительного средства 41. Затем измерительное средство 41 может регистрировать требуемые данные о рыбе механическим, оптическим, электромеханическим, электронным или другим способом. При использовании приемного элемента 43 в зоне измерительного средства 41 сопоставимое набегание также происходит в переходной области, в частности, в точке захвата рыбы захватным средством 20. Для этого рыба также проходит в зону захватного средства 20 на соответствующий приемный элемент 44 так, что в зоне средства 20 рыба лежит головой в той же плоскости, что и в зоне измерительного средства 41.
При симметричном положении каждой рыбы, оптимально ориентированной с помощью транспортировочной установки 10 согласно изобретению, рыбу подают для ее обработки, в частности, к обезглавливающему аппарату 49. Для этого рыбу транспортируют в подвешенном состоянии вдоль тракта TH. Когда симметрично ориентированная рыба достигает аппарата 49, тушку отделяют от головы рыбы с помощью дисковых ножей 51, 52, расположенных с V-образной формой. Тушку подбирают для последующей обработки и транспортируют дальше. Головы рыбы освобождают от закрепления путем раскрывания захватных рычагов 24, 26 в положение высвобождения и также собирают и транспортируют для последующей обработки или выгрузки.
Перед отделением головы рыба может быть измерена еще раз вдоль тракта TH, например, с помощью измерительного средства 53 для выявления и/или определения местоположения ключиц каждой подвешенной рыбы. Измерительные средства 53 выполняют сканирование наружного контура рыбы с обеих боковых сторон для определения местоположения ключиц. При известном местоположении ключиц может быть обеспечено еще более точное управление дисковыми ножами 51, 52.
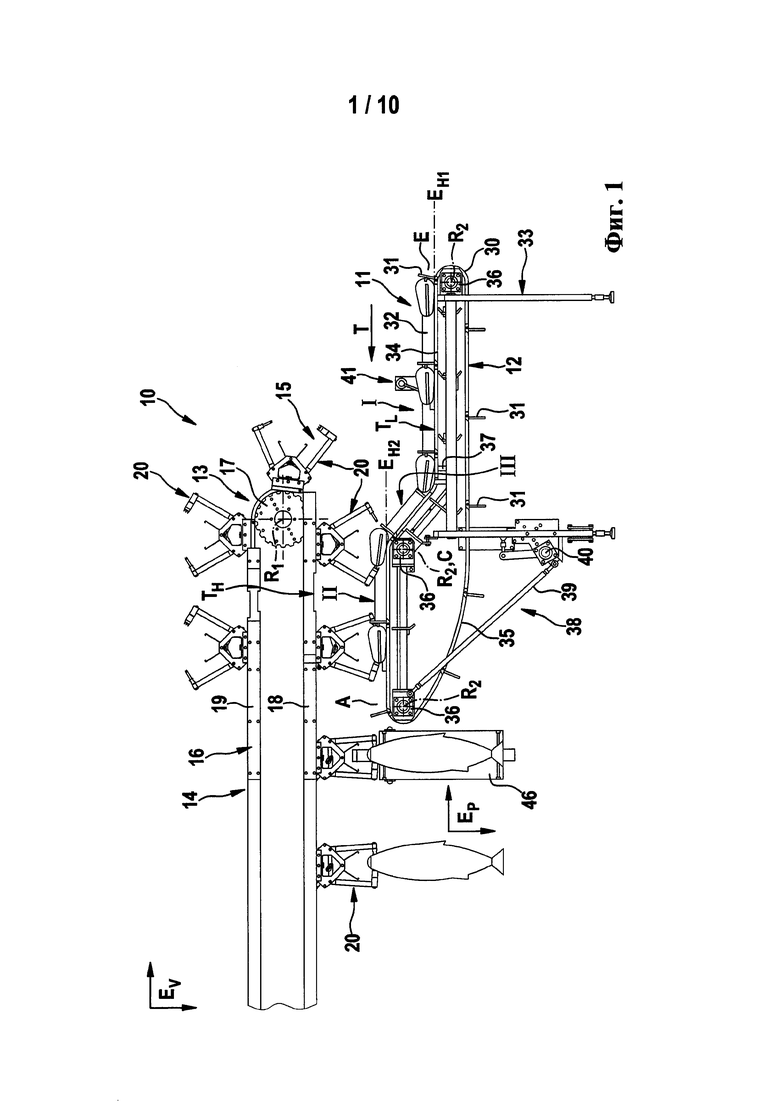
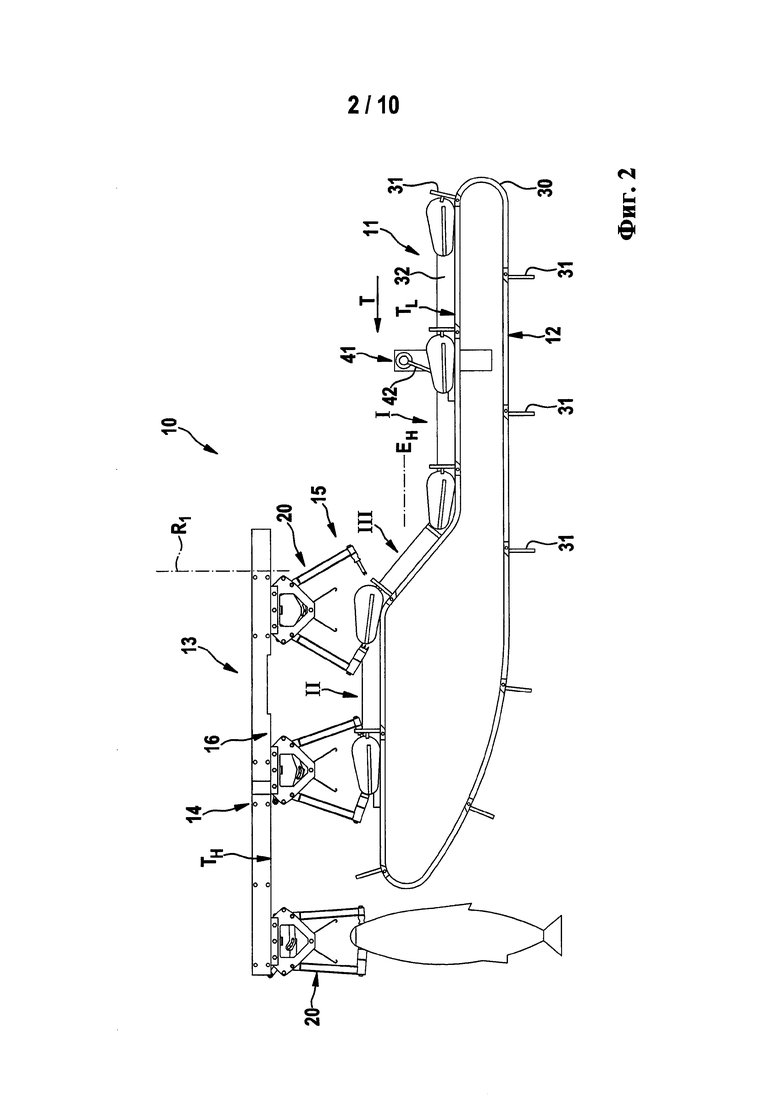

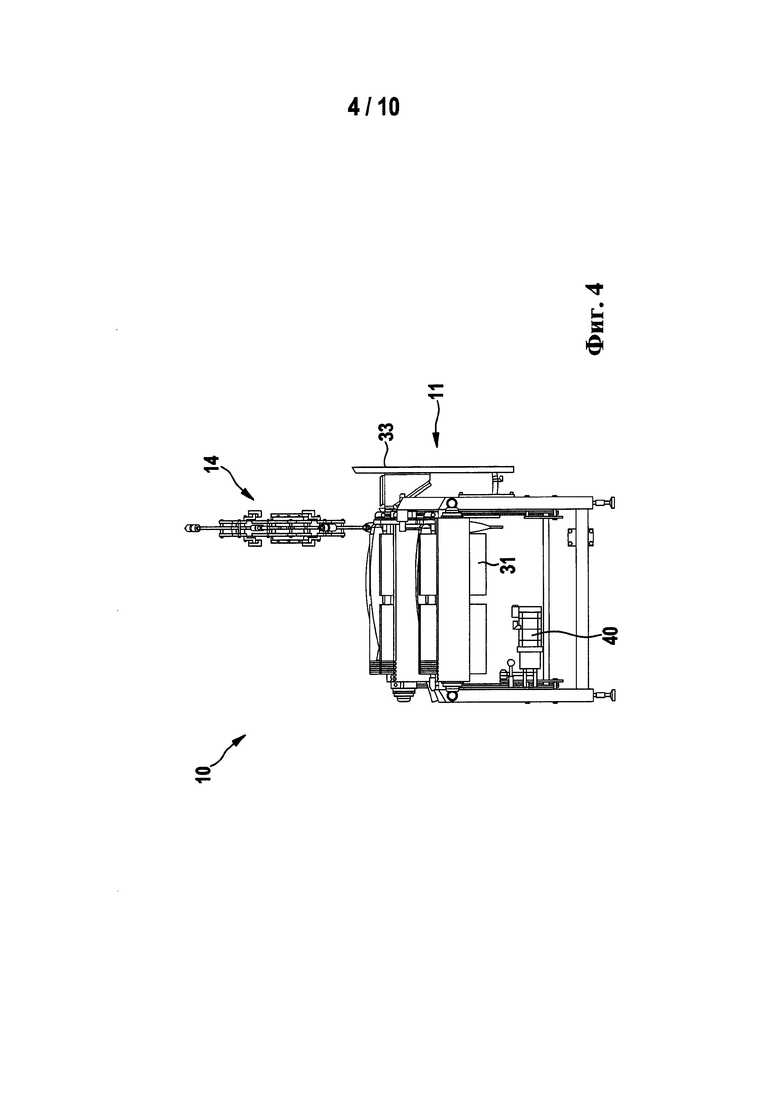
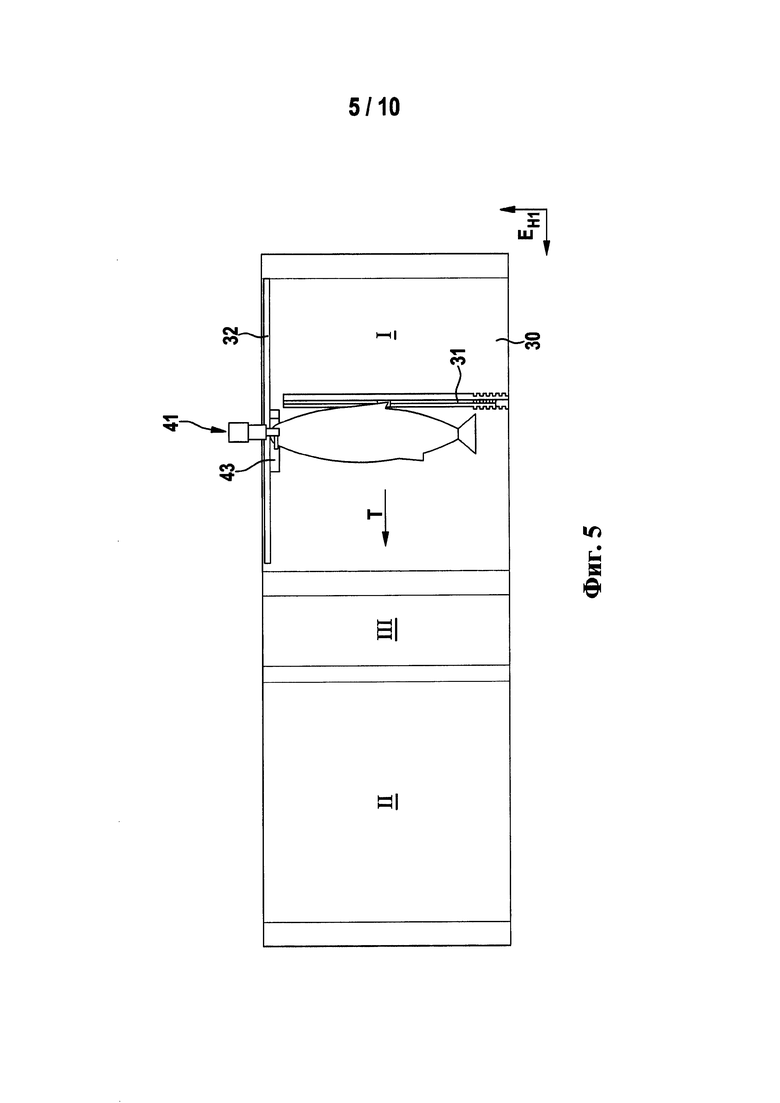
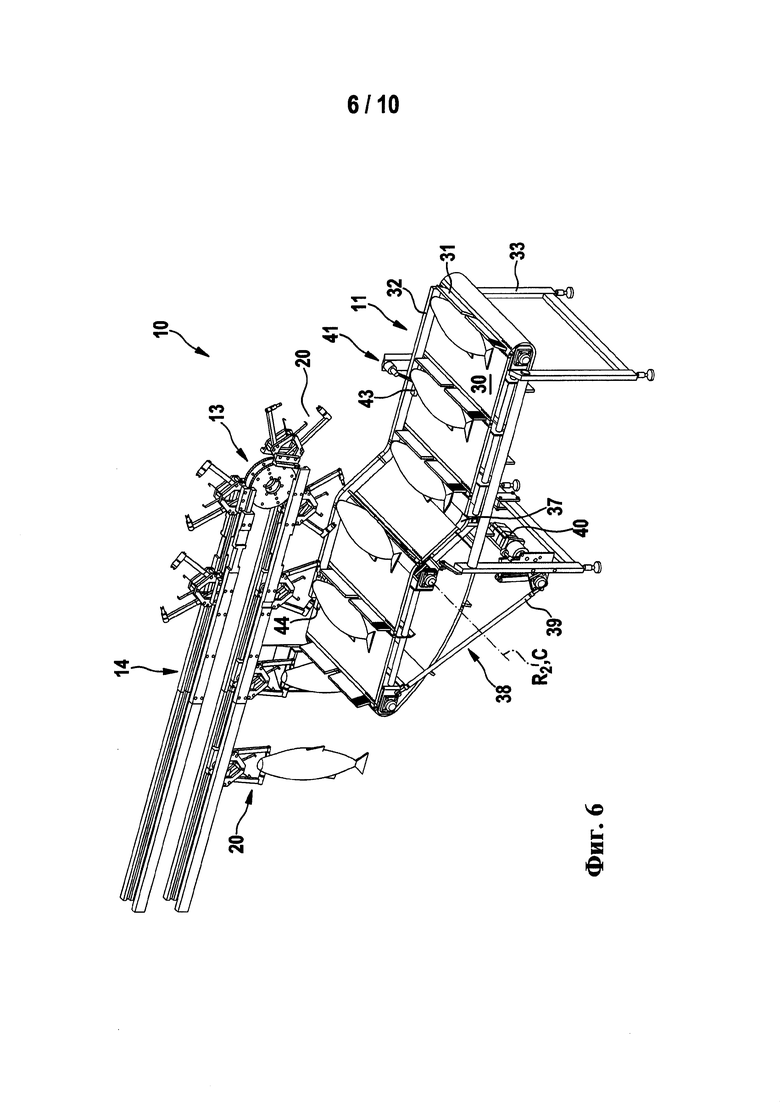
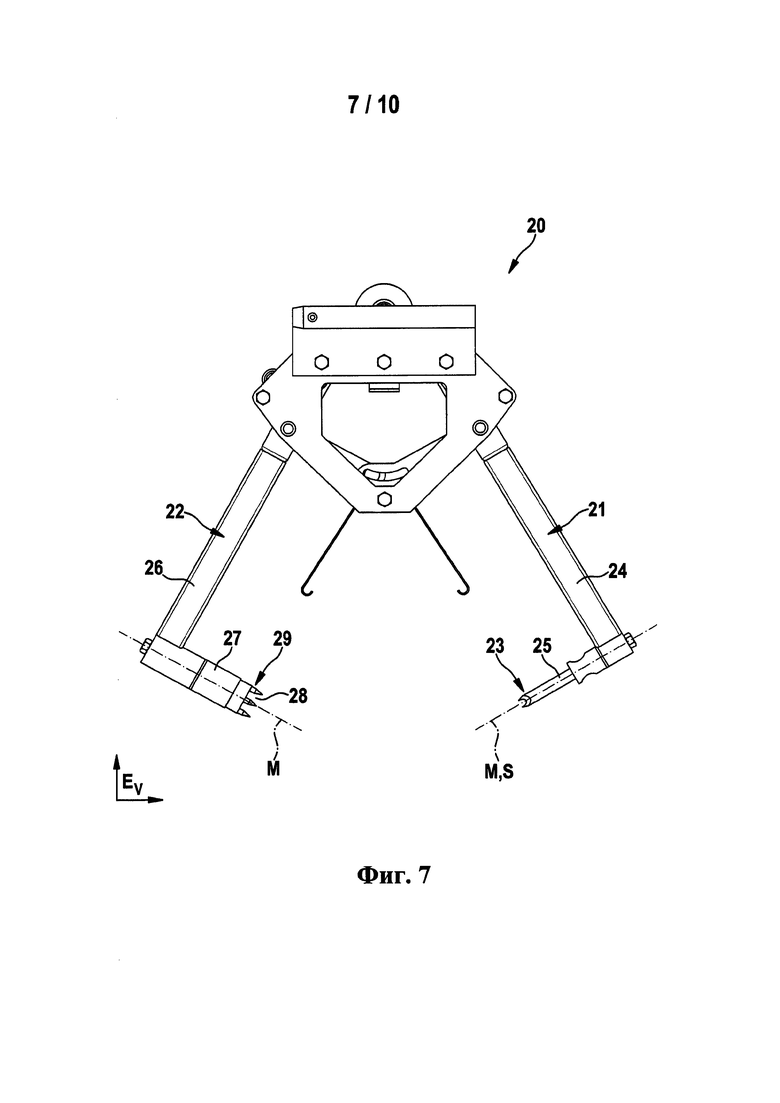
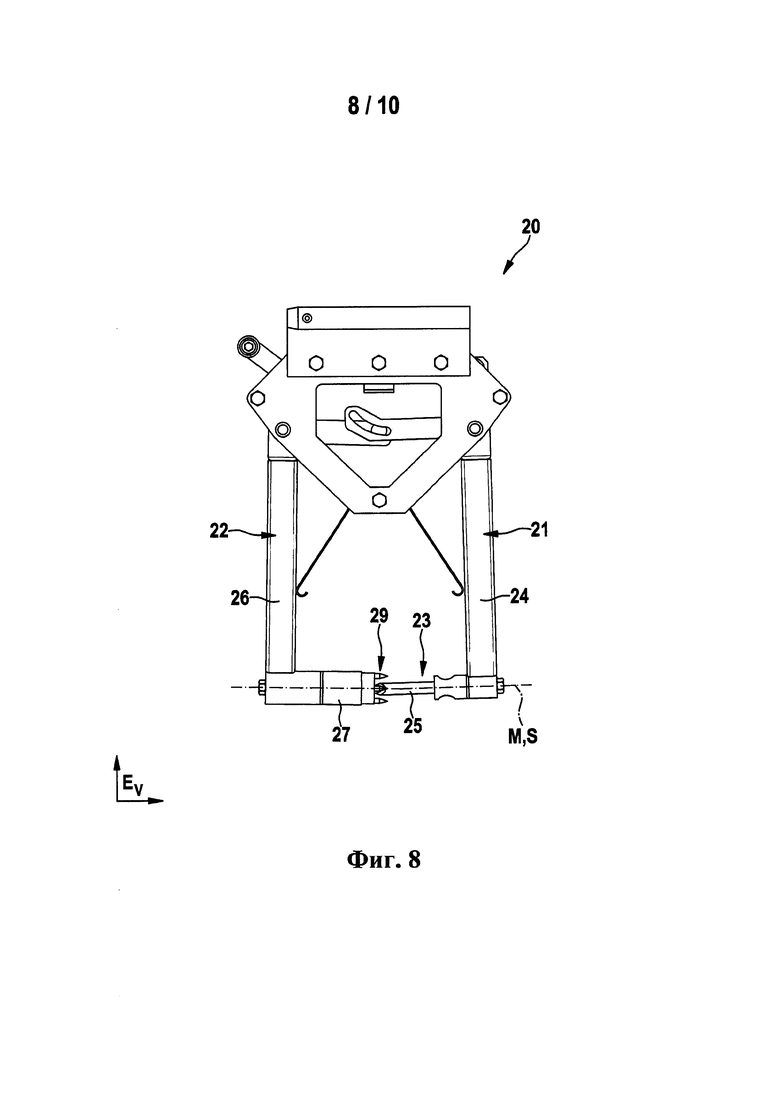
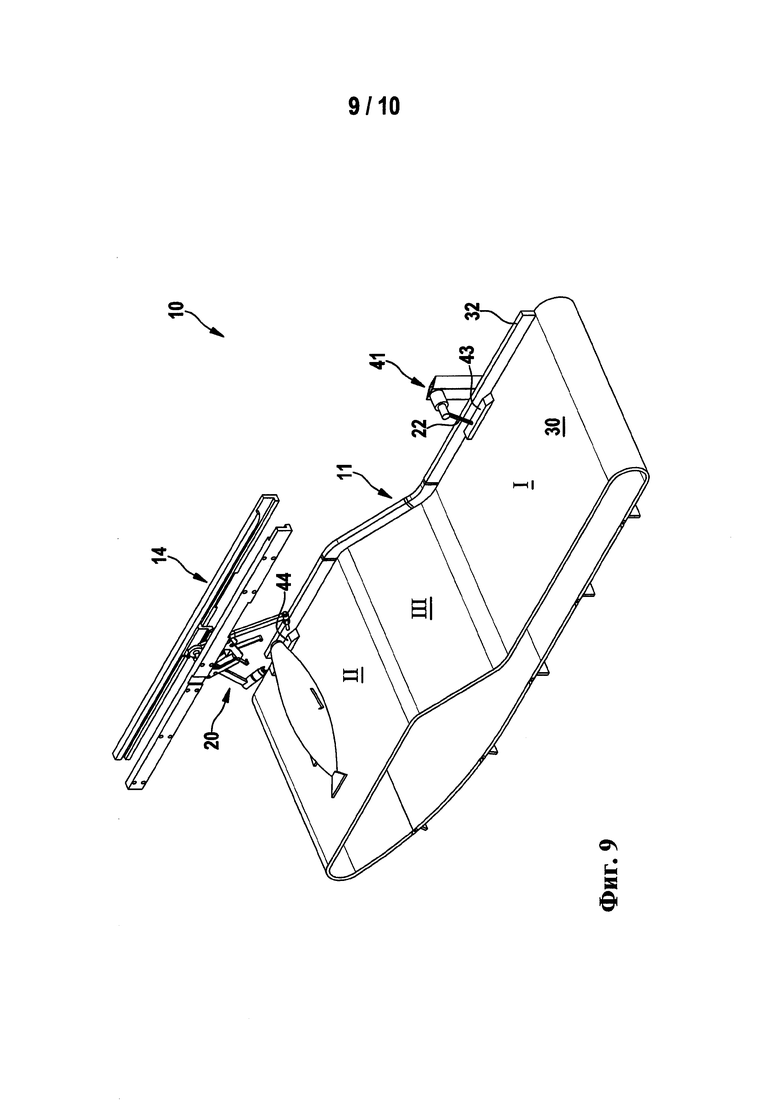
Изобретение относится к транспортировочной установке (10), спроектированной и выполненной с возможностью транспортировки рыбы поперечно ее продольной протяженности в направлении Т транспортирования и содержащей конвейерное устройство (11) для транспортировки отдельных разделенных рыб в лежачем положении вдоль тракта TL транспортирования из загрузочной зоны Е конвейерного устройства (11) к его разгрузочной зоне А. Конвейерное устройство (11) содержит транспортирующий элемент (12), приводимый в действие с возможностью вращения. Установка отличается тем, что конвейерному устройству (11) соответствует переходное устройство (13), которое спроектировано и выполнено с конвейерным устройством (11) и функционально соединено с ним таким образом, что рыба может быть перенесена автоматически из лежачего положения на тракте TL конвейерного устройства (11) в подвешенное положение на тракт TH переходного устройства (13). Изобретение также относится к рыбообрабатывающей машине (47), содержащей такую транспортировочную установку (10), и к соответствующему способу. Изобретение обеспечивает обработку рыбы с высокой производительностью независимо от ее качества. 3 н. и 32 з.п. ф-лы, 10 ил.
1. Транспортировочная установка (10), спроектированная и выполненная с возможностью транспортировки рыбы поперечно ее продольной протяженности в направлении Т транспортирования и содержащая конвейерное устройство (11) для транспортировки отдельных разделенных рыб в лежачем положении вдоль тракта TL транспортирования из загрузочной зоны Е конвейерного устройства (11) к его разгрузочной зоне А, причем конвейерное устройство (11) содержит транспортирующий элемент (12), приводимый в действие с возможностью вращения, отличающаяся тем, что конвейерному устройству (11) соответствует переходное устройство (13), которое спроектировано и выполнено с конвейерным устройством (11) и функционально соединено с ним таким образом, что рыба может переноситься автоматически из лежачего положения на тракте TL конвейерного устройства (11) в подвешенное положение на тракте TH переходного устройства (13), причем
переходное устройство (13) содержит подвесное конвейерное устройство (14), расположенное над указанным конвейерным устройством (11) для транспортировки рыбы в лежачем положении и предназначенное для транспортировки подвешенной рыбы вдоль тракта TH, и средство (15) для переноса рыбы, а именно для удаления рыбы из конвейерного устройства (11), предназначенного для транспортировки рыбы в лежачем положении, и удерживания рыбы во время транспортировки в подвешенном состоянии вдоль тракта TH, и причем
подвесное конвейерное устройство (14) проходит за пределы конвейерного устройства (11) в направлении Т транспортирования, при этом переходная область для рыбы, проходящей из конвейерного устройства (11) к подвесному конвейерному устройству (14), выполнена в зоне перекрытия конвейерного устройства (11) и подвесного конвейерного устройства (14) в направлении Т транспортирования перед разгрузочной зоной А конвейерного устройства (11).
2. Транспортировочная установка (10) по п. 1, отличающаяся тем, что подвесное конвейерное устройство (14) содержит транспортирующий элемент (16), который приводится в действие с возможностью вращения и на котором расположено указанное средство (15) для удаления и удерживания рыбы, содержащее по меньшей мере одно захватное средство (20) для захвата головы рыбы.
3. Транспортировочная установка (10) по п. 2, отличающаяся тем, что транспортирующий элемент (16) подвесного конвейерного устройства (14) представляет собой транспортирующую цепь, приводимую в действие с возможностью вращения вокруг отклоняющей и/или приводной рабочей части (17), центральные оси и/или оси R1 вращения которой расположены горизонтально и поперечно направлению Т транспортирования так, что средство (15) для удаления и удерживания рыбы перемещается в вертикальной плоскости EV и находится на наименьшем расстоянии от транспортирующего элемента (12) конвейерного устройства (11) в переходной области.
4. Транспортировочная установка (10) по п. 2 или 3, отличающаяся тем, что средство (15) для удаления и удерживания рыбы содержит захватные средства (20), вращающиеся вместе с транспортирующим элементом (16) подвесного конвейерного устройства (14), причем каждое захватное средство (20) содержит два захватных элемента (21, 22), при этом по меньшей мере один захватный элемент (21, 22) выполнен с по меньшей мере одной иглой (23, 29), направленной к захватываемой рыбе.
5. Транспортировочная установка (10) по п. 4, отличающаяся тем, что первый захватный элемент (21) содержит захватный рычаг (24), на свободном конце которого расположена жесткая игольчатая рабочая часть (25), закрепленная с предотвращением кручения, а второй захватный элемент (22) содержит захватный рычаг (26), на свободном конце которого расположена игольчатая рабочая часть (27), поддерживаемая с возможностью поворота, причем захватные рычаги (24, 26) спроектированы и выполнены с возможностью автоматического перемещения по направлению друг к другу в положение удерживания и друг от друга в положение высвобождения, и наоборот, в вертикальной плоскости EV, при этом в горизонтальном положении центральные оси и/или оси М поворота игольчатых рабочих частей (25, 27) расположены горизонтально и параллельно направлению Т транспортирования.
6. Транспортировочная установка (10) по п. 5, отличающаяся тем, что первая игольчатая рабочая часть (25) первого захватного элемента (21) содержит иглу (23), полностью проходящую сквозь голову рыбы, причем указанная игла входит во вторую игольчатую рабочую часть (27) в положении удерживания, ввиду чего вторая игольчатая рабочая часть (27) второго захватного элемента (22) имеет отверстие (28) для приема иглы (23) первой игольчатой рабочей части (25), при этом вокруг указанного отверстия (28) второй игольчатой рабочей части (27) расположены по меньшей мере две иглы (29), проникающие в голову.
7. Транспортировочная установка (10) по п. 6, отличающаяся тем, что в положении удерживания единственная центральная игла (23) первой игольчатой рабочей части (25) образует ось S поворота, расположенную горизонтально и параллельно направлению Т транспортирования для каждой рыбы.
8. Транспортировочная установка (10) по любому из пп. 1-7, отличающаяся тем, что транспортирующий элемент (12) спроектирован и выполнен с возможностью транспортирования рыбы в лежачем положении вперед брюшком или спинкой в направлении Т транспортирования и содержит конвейерную ленту (30), содержащую перегородки (31), проходящие поперечно направлению Т транспортирования и перпендикулярно плоскости EH транспортирования и вращающиеся вместе с конвейерной лентой (30), для разбиения указанной ленты (30) на отдельные секции, каждая из которых принимает одну рыбу, при этом перегородки (31) проходят в каждом случае лишь по части ширины конвейерной ленты (30).
9. Транспортировочная установка (10) по п. 8, отличающаяся тем, что по меньшей мере на одной стороне в направлении Т транспортирования к конвейерной ленте (30) присоединен закрепленный опорный элемент (32) для расположения каждой рыбы в ее продольной ориентации поперечно направлению Т транспортирования, причем упорный элемент (32) спроектирован и выполнен с возможностью расположения головы рыбы в определенном положении.
10. Транспортировочная установка (10) по п. 8 или 9, отличающаяся тем, что конвейерная лента (30), которая образована верхней ветвью (34) в качестве ветви транспортирования и нижней ветвью (35) в качестве холостой ветви, направляется вокруг по меньшей мере трех отклоняющих и/или приводных рабочих частей (36), центральные оси и/или оси R2 вращения которых расположены горизонтально и поперечно направлению Т транспортирования, при этом в зоне верхней ветви (34) указанная конвейерная лента имеет первую секцию I, проходящую в плоскости EH1 транспортирования, и вторую секцию II, следующую за ней в направлении Т транспортирования и проходящую в плоскости ЕН2 транспортирования, причем плоскость EH2 расположена выше плоскости EH1, так что рыба транспортируется конвейерной лентой (30) по наклонной траектории от плоскости EH1 к плоскости EH2 через соединительную секцию III.
11. Транспортировочная установка (10) по любому из пп. 8-10, отличающаяся тем, что конвейерная лента (30) выполнена с возможностью регулирования по высоте по меньшей мере в переходной области.
12. Транспортировочная установка (10) по п. 10 или 11, отличающаяся тем, что секция II конвейерной ленты (30), проходящая в плоскости ЕН2 транспортирования, выполнена с возможностью поворота при помощи привода (40) вокруг оси С поворота, расположенной горизонтально и поперечно направлению Т транспортирования.
13. Транспортировочная установка (10) по любому из пп. 9-12, отличающаяся тем, что она содержит измерительное средство (41) для регистрации и/или определения данных о размерах рыбы, в частности для определения толщины головы в направлении, перпендикулярном плоскости EH, и ширины головы в плоскости EH в направлении Т транспортирования, причем измерительное средство (41) расположено перед переходной областью в направлении Т транспортирования.
14. Транспортировочная установка (10) по п. 13, отличающаяся тем, что указанное измерительное средство (41) закреплено над конвейерным устройством (11) и содержит мерную лопатку (42), выполненную и расположенную с возможностью ее отклонения головой рыбы.
15. Транспортировочная установка (10) по п. 13 или 14, отличающаяся тем, что в зоне измерительного средства (41), а именно непосредственно под измерительным средством (41), на упорном элементе (32) расположен закрепленный приемный элемент (43), спроектированный и выполненный с возможностью приема рыбы ее головой так, что верхняя поверхность скольжения приемного элемента (43), направленная к измерительному средству (41) и ориентированная параллельно плоскости EH1 транспортирования, образует отсчетную плоскость для измерительного средства (41) при определении толщины головы рыбы и положения оси симметрии головы рыбы.
16. Транспортировочная установка (10) по п. 15, отличающаяся тем, что на упорном элементе (32) в переходной области также закреплен приемный элемент (44), спроектированный и выполненный с возможностью приема рыбы ее головой, при этом указанные два приемных элемента (43, 44) выполнены одинаково с точки зрения их высоты, начиная от поверхности конвейерной ленты (30) и до верхней поверхности скольжения приемного элемента (43, 44), так что положение оси симметрии головы рыбы, определяемое измерительным средством (41), является воспроизводимым в переходной области.
17. Транспортировочная установка (10) по любому из пп. 13-16, отличающаяся тем, что она содержит устройство (45) управления, к которому присоединен указанный или каждый привод для конвейерной ленты (30) конвейерного устройства (11), и/или указанный или каждый привод (40) для регулирования высоты конвейерной ленты (30) конвейерного устройства (11), и/или измерительное средство (41).
18. Транспортировочная установка (10) по любому из пп. 13-17, отличающаяся тем, что расстояние от измерительного средства (41) до упорного элемента (32) в направлении, поперечном направлению Т транспортирования, т.е. точки измерения, соответствует расстоянию от центральной оси и/или оси М поворота игольчатых рабочих частей (25, 27) в положении удерживания до упорного элемента (32) в направлении, поперечном направлению Т транспортирования.
19. Транспортировочная установка (10) по любому из пп. 1-18, отличающаяся тем, что в направлении Т транспортирования за конвейерным устройством (11) для транспортировки рыбы в лежачем положении, вдоль тракта TH подвесного конвейерного устройства (14) расположен ударный элемент (46), который направлен по существу вертикально вниз от плоскости ЕН2 транспортирования и ударная поверхность которого ориентирована в направлении подвешенной рыбы.
20. Рыбообрабатывающая машина (47), содержащая транспортировочную установку (10) для транспортировки рыбы в зоне рыбообрабатывающей установки и по меньшей мере одну рыбообрабатывающую установку (48), отличающаяся тем, что транспортировочная установка (10) спроектирована и выполнена в соответствии с одним из пп. 1-19, при этом указанная или каждая рыбообрабатывающая установка (48) расположена в зоне, в которой рыба находится в подвешенном положении.
21. Рыбообрабатывающая машина (47) по п. 20, отличающаяся тем, что она спроектирована и выполнена с возможностью обезглавливания не умерщвленных и/или умерщвленных рыб со вскрытыми брюшными полостями, при этом рыбообрабатывающая установка (48) вдоль тракта TH транспортирования подвесного конвейерного устройства (14) спроектирована и выполнена в виде обезглавливающего аппарата (49).
22. Рыбообрабатывающая машина (47) по п. 21, отличающаяся тем, что обезглавливающий аппарат (49) содержит отделяющее устройство (50), предназначенное для отделения тушки рыбы, подвешенной за голову, и содержащее пару дисковых ножей (51, 52), приводимых в действие с возможностью вращения, при этом дисковые ножи (51, 52) расположены с V-образной формой относительно друг друга на противоположных сторонах тракта TH транспортирования.
23. Рыбообрабатывающая машина (47) по п. 21 или 22, отличающаяся тем, что в направлении Т транспортирования за конвейерным устройством (11) и перед обезглавливающим аппаратом (49), в тракте TH подвесного конвейерного устройства (14) расположено измерительное средство (53) для выявления и/или определения положения ключиц каждой подвешенной рыбы.
24. Рыбообрабатывающая машина (47) по любому из пп. 21-23, отличающаяся тем, что в направлении Т транспортирования за конвейерным устройством (11) для транспортировки рыбы в лежачем положении и перед обезглавливающим аппаратом (49), в тракте TH подвесного конвейерного устройства (14) расположено средство (54) для захвата грудных плавников.
25. Способ транспортировки рыбы поперечно ее продольной протяженности в направлении Т транспортирования, включающий этапы:
укладывания рыбы по отдельности на приводимый в действие с возможностью вращения транспортирующий элемент (12) конвейерного устройства (11) для транспортировки рыбы в лежачем положении вдоль тракта TL транспортирования,
транспортирования рыбы вдоль тракта TL транспортирования из загрузочной зоны Е конвейерного устройства (11) к его разгрузочной зоне А, отличающийся тем, что рыбу переносят автоматически из лежачего положения в подвешенное положение с помощью переходного устройства (13), при этом рыбу поднимают с конвейерного устройства (11) с использованием переходного устройства (13) вдоль тракта TL и приводят в подвешенное положение во время ее транспортировки вдоль тракта TH, причем
захватные средства (20) вдоль подвесного конвейерного устройства (14) переходного устройства (13) в плоскости EV, расположенной перпендикулярно плоскости EH, перемещаются за пределы тракта TL конвейерного устройства (11) вдоль тракта TH так, что захваченная за голову рыба поворачивается в подвешенное положение после выхода из конвейерного устройства (11).
26. Способ по п. 25, отличающийся тем, что рыбу транспортируют вперед брюшком в направлении Т транспортирования, при этом спинка расположена на перегородках (31), проходящих поперечно направлению Т конвейерной ленты (30) транспортирующего элемента (12), а голова опирается на упорный элемент (32), присоединенный к конвейерной ленте (30), при этом данные о размерах рыбы, в частности о толщине головы в направлении, перпендикулярном плоскости EH, в которой проходит конвейерная лента (30), и/или о ширине головы в плоскости EH в направлении Т транспортирования, регистрируют и/или определяют в секции I конвейерной ленты (30) с помощью измерительного средства (41).
27. Способ по п. 26, отличающийся тем, что положение оси симметрии головы определяют исходя из толщины головы.
28. Способ по п. 26 или 27, отличающийся тем, что в секции II конвейерной ленты (30) рыбу подают к захватному средству (20), которое захватывает рыбу за голову, при этом положение головы в направлении, перпендикулярном захватному средству (20), регулируют путем регулирования высоты секции II конвейерной ленты (30) в зависимости от данных, зарегистрированных и/или определенных измерительным средством (41), так, что в зоне захватного средства (20) голова рыбы расположена в той же плоскости, что и в зоне измерительного средства (41).
29. Способ по любому из пп. 25-28, отличающийся тем, что для захвата головы рыбы за нижнюю челюсть на брюшной стороне и за верхнюю челюсть на спинной стороне в каждом случае в голову рыбы проникает одна игольчатая рабочая часть (25, 27) в результате перемещения двух захватных рычагов (24, 26) захватного средства (20), на которых расположены игольчатые рабочие части (25, 27), из положения высвобождения в положение удерживания.
30. Способ по п. 25 или 29, отличающийся тем, что во время транспортировки вдоль тракта TL из секции I в секцию II конвейерной ленты (30) рыбу располагают снизу между захватными рычагами (24, 26), находящимися в положении высвобождения, при этом указанные захватные рычаги перемещают сверху в вертикальной плоскости EV в направлении конвейерной ленты (30).
31. Способ по любому из пп. 25, 29 или 30, отличающийся тем, что захватные рычаги перемещают по направлению друг к другу в вертикальной плоскости EV так, что жесткая игольчатая рабочая часть (25) с одной иглой (23) полностью проходит сквозь голову рыбы со спинной стороны, тогда как вторая игольчатая рабочая часть (27), поддерживаемая с возможностью поворота и выполненная с по меньшей мере двумя иглами (29), проникает в голову с брюшной стороны.
32. Способ по п. 31, отличающийся тем, что скорость перемещения конвейерной ленты (30) изменяют в зависимости от зарегистрированных и/или определенных данных, в частности ширины головы рыбы в плоскости EH в направлении Т транспортирования, когда рыба расположена в зоне захватного средства (20), таким образом, что поворотная игольчатая рабочая часть (27) с указанными по меньшей мере двумя иглами (29) входит в контакт с головой рыбы в то же время, что и жесткая игольчатая часть (25), или раньше по времени.
33. Способ по п. 32, отличающийся тем, что скорость перемещения конвейерной ленты (30) изменяют, когда рыба расположена в разгрузочной зоне А конвейерного устройства (11), таким образом, что предотвращают столкновение конвейерной ленты (30) или расположенных на ней перегородок (31) с разворачивающейся рыбой, при этом изменения скорости перемещения согласуют друг с другом при захвате рыбы, с одной стороны, и при развороте рыбы вниз, с другой стороны, путем секционирования конвейерной ленты (30).
34. Способ по любому из пп. 26-33, отличающийся тем, что рыба проходит головой на приемный элемент (43) для регистрации и/или определения данных о ее размерах таким образом, что голова рыбы возвышается относительно плоскости EH транспортирования.
35. Способ по п. 34, отличающийся тем, что рыба в зоне захватного средства (20) также проходит на соответствующий приемный элемент (44) таким образом, что ее голова в зоне захватного средства (20) лежит в той же плоскости, что и в зоне измерительного средства (41).
| JP 2002034441 A, 05.02.2002 | |||
| JP 60098935 A, 01.06.1985 | |||
| Прибор для взятия проб жидкости из скважин | 1931 |
|
SU29432A1 |
| DE 1927916 A1, 03.12.1970 | |||
| JP S62208230 A, 12.09.1987 | |||
| Способ ориентированной подачи к режущим инструментам рыбы и устройство для его осуществления | 1989 |
|
SU1775088A1 |

