Настоящее изобретение относится к установке и способу для передачи рыбы, транспортируемой в продольном направлении, в поперечное конвейерное устройство. Кроме того, изобретение относится к установке для передачи рыбы в рыбообрабатывающую машину.
Такие установки и способы используются, в частности, при автоматизированной обработке рыбы, например, при автоматизированной подаче рыбы в головоотсекающую машину. Кроме того, указанные установки и способы обычно также пригодны для подачи рыбы по отдельности в заданной последовательности в рыбообрабатывающую машину для дальнейшей обработки.
Такое типовое устройство для передачи рыбы в рыбообрабатывающую машину в заданном порядке описано в документе DE 19511489 А1. Рыба сначала транспортируется внутрь устройства питающим конвейером, разбрасывается и разделяется путем раскладки массы рыбы. Это сопровождается выравниванием рыбы по длине, так что рыбу подают в продольном направлении. Продольное направление соответствует оси голова-хвост рыбы, по которой рыба выравнивается при перемещении в продольном направлении.
Рыбу затем с использованием средств индивидуального удаления циклически подают в поперечный конвейер, имеющий приемные элементы в виде камер или желобов, открытых сверху. Циклическая загрузка рыбы в поперечный конвейер происходит в моменты передачи, в которые каждый из приемных элементов находится в возможном положении передачи, в котором соответствующий приемный элемент или элементы обращен (обращены) к средствам индивидуального удаления.
Когда одна рыба переместилась в приемные элементы поперечного конвейера, следующая рыба выгружается из средств индивидуального удаления, т.е. из распределительных устройств, в каждом случае во время следующего цикла, а именно, когда следующие пустые приемные элементы достигли следующего возможного положения передачи.
Чтобы избежать повторения, документ DE 19511489 А1, из которого будут видны дальнейшие детали таких установок, включен в настоящее описание посредством ссылки.
Интервал времени для передачи рыбы, транспортируемой в продольном направлении из распределительных устройств к приемным элементам поперечного конвейера, обратно пропорционален скорости транспортировки указанного поперечного конвейера. Увеличение скорости поперечной транспортировки, следовательно, приводит к уменьшению интервала времени, в течение которого происходит передача, с тем результатом, что, когда скорость поперечной транспортировки возрастает, требуются все более и более высокие значения ускорения, чтобы рыба могла передаваться из распределительных устройств в приемные элементы поперечного конвейера в течение этого интервала времени. Максимально достижимые значения ускорения, однако, ограничены сверху инерцией массы рыбы и ограниченной возможностью передачи таких высоких значений ускорения рыбе.
Эти установки и способы, известные из уровня техники, следовательно, имеют недостаток, заключающийся в том, что максимально достижимая скорость транспортировки поперечного конвейера ограничена благодаря указанным обстоятельствам, так как существует верхний предел для скорости транспортировки, который не может быть превышен.
Следующий недостаток известных устройств и способов состоит в том, что поперечное транспортирующее устройство и ускорительные устройства жестко связаны друг с другом, так что ускорения, требуемые для надежной передачи, могут быть достигнуты только при условии, что скорость транспортировки поперечного транспортирующего устройства находится внутри конкретных предельных значений. Таким образом, с одной стороны, минимальная скорость выброса, требуемая для надежной передачи рыбы, не достигается, если скорость транспортировки слишком низкая. С другой стороны, тем не менее, максимальные значения ускорения, описанные прежде, превышаются, если скорость транспортировки слишком высокая.
Следовательно, цель настоящего изобретения состоит в создании указанных выше установок и способа, которые обеспечивают автоматическую передачу рыбы от продольного направления в поперечное транспортирующее устройство, с повышенной надежностью при любой поперечной скорости транспортировки.
Цель достигается посредством установки, указанной в начале описания, причем поперечное транспортирующее устройство содержит приемные элементы, образующие поперечный конвейер для индивидуального приема передаваемой рыбы, и приводные средства для непрерывной транспортировки указанных приемных элементов, расположенные на поперечном конвейере, и по меньшей мере два распределительных устройства в количестве m, расположенных на равных расстояниях, для передачи рыбы в приемные элементы, расположенные в области передачи, средний размер которой соответствует, по меньшей мере, ширине по меньшей мере двух приемных элементов в количестве n, причем указанная установка также содержит питающие устройства, предназначенные для каждого распределительного устройства и предназначенные для подачи рыбы в распределительные устройства в продольном направлении, и управляющее устройство, присоединенное к приводным средствам и распределительным устройствам, причем управляющее устройство выполнено с возможностью управления распределительными устройствами в таком режиме, что рыба, удерживаемая в распределительных устройствах, передается в приемные элементы, находящиеся в положении передачи, одновременно в определенные моменты передачи, причем передача посредством управляющего устройства выполняется циклически и периодически, так что временной интервал между двумя последовательными моментами передачи составляет, по меньшей мере, n+1 питающих циклов в каждом случае, причем питающий цикл представляет собой период времени, необходимый для перемещения приемных элементов на ширину одного из них.
Таким образом, с одной стороны, передаваемая рыба загружается в приемные элементы поперечного конвейера в значительной степени без перерыва, в то время как временной интервал между последовательными моментами передачи в каждом случае доводится до максимума. Таким образом, достигается надежная передача рыбы при любых поперечных скоростях транспортировки.
Согласно преимущественному варианту изобретения, управляющее устройство для управления распределительным устройством содержит первый тактовый генератор и второй тактовый генератор, которые выполнены таким образом, что передача выполняется попеременно с образованием первого временного интервала и второго временного интервала между последовательными моментами передачи в каждом случае, причем первый тактовый генератор регулируется для задания первого временного интервала как n+1 питающих циклов, а второй тактовый генератор регулируется для задания второго временного интервала как n⋅(m-1)-1 питающих циклов. Это обеспечивает преимущество, заключающееся в том, что временной интервал между последовательными моментами передачи в каждом случае максимизируется для каждой отдельной конфигурации установки согласно изобретению. Преимущественно, первый и второй тактовые генераторы выполнены в виде частей управляющей программы управляющего устройства.
Предпочтительный вариант изобретения отличается тем, что распределительные устройства содержат ускоряющие блоки для ускорения удерживаемой рыбы, при этом управляющее устройство соединено, по меньшей мере, с одним генератором положения, для определения положения, по меньшей мере, одного из приемных элементов, причем установка дополнительно содержит управляющие средства, которые выполнены с возможностью определения опережения для ускорения рыбы, удерживаемой в распределительных устройствах, посредством ускоряющих блоков, на основе положения приемного элемента, при этом управляющее устройство содержит устройство управления ускорением, которое присоединено к ускоряющим блокам и управляет ими таким образом, что удерживаемая рыба ускоряется, с учетом опережения по времени, и они достигают требуемой скорости выброса в соответствующий момент передачи. Предпочтительно, с одной стороны, что время, доступное в каждом случае для ускорения рыбы, используется оптимально, так что мгновенное ускорение может поддерживаться низким, насколько это возможно. С другой стороны, рыба ускоряется только до установленной скорости выброса, которая гарантирует надежную передачу рыбы от момента выхода из распределительного устройства и до тех пор, пока рыба не окажется безопасно в приемных устройствах. Особо предпочтительно, если блоки ускорения в качестве привода содержат сервомотор. Таким образом, блоки ускорения совершенно не соединены механически с поперечным транспортирующим устройством, так что процесс ускорения рыбы не зависит от скорости транспортировки поперечного конвейера. Далее, предпочтительно, чтобы устройство управления ускорением регулировалось с обеспечением задания ускорения для управления скоростью сервомотора.
Согласно другому выгодному варианту изобретения, профиль ускорения хранится в устройстве управления ускорением, которое выполнено с возможностью управления блоками ускорения, согласно указанному установленному профилю ускорения. Это обеспечивает преимущество, состоящее в том, что рыба, удерживаемая в распределительных устройствах, необязательно ускоряется с постоянным ускорением, но что профиль ускорения может регулироваться под заказчика. Например, в начале фазы ускорения, предпочтительно, сравнительно низкие значения ускорения устанавливаются посредством профиля ускорения, чтобы надежно захватить каждую рыбу подходящим блоком ускорения и ускорить ее, соответственно, мягко, пока не будут преодолены статические силы трения. Возможно также ускорять рыбу до установленной максимальной скорости и уменьшать мгновенную скорость как раз перед достижением соответствующего момента передачи, так чтобы освободить рыбу от блоков ускорения.
Дальнейший предпочтительный вариант изобретения обеспечивает то, что хронологическая последовательность профиля ускорения, с начала ускорения удерживаемой рыбы до достижения скорости выброса, является монотонной или строго монотонно возрастающей. Таким образом, установленная скорость выброса может быть достигнута в кратчайшее возможное время, несмотря на относительно низкие значения ускорения в начале фазы ускорения, так что процесс ускорения требует как можно меньше общего времени, и надежная передача рыбы достигается всегда, при любой скорости поперечной транспортировки.
Цель достигается посредством установки для передачи рыбы в рыбообрабатывающую машину, содержащей питающее устройство для подачи несортированной рыбы, средства для выравнивания рыбы по длине и транспортировки рыбы в продольном направлении, и установку для транспортировки рыбы, подаваемой в продольном направлении, в поперечное транспортирующее устройство по любому из пп. 1-5, причем поперечное транспортирующее устройство образует питатель рыбообрабатывающей машины. Другими словами, установка по любому из пп. 1-5, описанная выше, является частью рыбообрабатывающей линии, причем поперечное транспортирующее устройство подает рыбу в рыбообрабатывающую машину индивидуально и в определенном положении, посредством приемных элементов. Благодаря указанным выше достоинствам установки согласно одному из пп. 1-5 формулы изобретения, рыбообрабатывающая машина может обрабатывать значительно больше рыбы в единицу времени, по сравнению с известными рыбообрабатывающими машинами, так как поперечное транспортирующее устройство может теперь работать с самого начала при гораздо более высоких скоростях транспортировки.
Кроме того, цель достигается способом, о котором упоминалось выше и в котором поперечное транспортирующее устройство содержит приемные элементы, образующие поперечный конвейер для индивидуального приема передаваемой рыбы, и по меньшей мере двух распределительных устройств в количестве т, расположенных на равных расстояниях, для передачи рыбы в приемные элементы, расположены в области передачи, средняя длина которой соответствует, по меньшей мере, ширине по меньшей мере двух приемных элементов в количестве п, причем способ включает подачу по меньшей мере двух рыб в количестве m путем транспортировки рыбы в продольном направлении в соответствующие распределительные устройства, непрерывную транспортировку приемных элементов в поперечном направлении транспортировки, одновременную передачу рыбы, удерживаемой в распределительных устройствах, в приемные элементы, находящиеся в положении передачи в определенные моменты передачи, причем питающий цикл содержит период времени, необходимый для перемещения приемных элементов на ширину одного из указанных приемных элементов, и передачу выполняют циклически и периодически, так что временной интервал между любыми двумя последовательными моментами передачи составляет, по меньшей мере, n+1 питающих циклов.
Предпочтительный вариант способа отличается тем, что передачу выполняют попеременно с первым временным интервалом и вторым временным интервалом между последовательными моментами передачи в каждом случае, причем первый интервал времени составляет n+1 циклов подачи, а второй интервал времени составляет n⋅(m-1)-1 циклов подачи.
Согласно предпочтительному варианту изобретения, в способе дополнительно определяют положение, по меньшей мере, одного из приемных элементов, определяют опережение по времени для ускорения рыбы, удерживаемой в распределительных устройствах, на основе положения приемного элемента, ускоряют удерживаемую рыбу с учетом такого опережения по времени, что требуемая скорость выброса рыбы достигается в соответствующий момент передачи.
Ускорение удерживаемой рыбы предпочтительно осуществляют с помощью назначенного профиля ускорения.
Далее, предпочтительно, хронологическая последовательность профиля ускорения, от начала ускорения удерживаемой рыбы до достижения скорости выброса, является монотонно или строго монотонно возрастающей.
Для исключения повторения следует отметить, что преимущества, обеспечиваемые предложенным способом, аналогичны преимуществам, обеспечиваемым предложенными установками.
Дальнейшие предпочтительные и/или выгодные признаки и варианты выполнения изобретения очевидны из зависимых пунктов формулы изобретения и описания. Особенно предпочтительные варианты объясняются более подробно со ссылкой на приложенные чертежи. На чертежах:
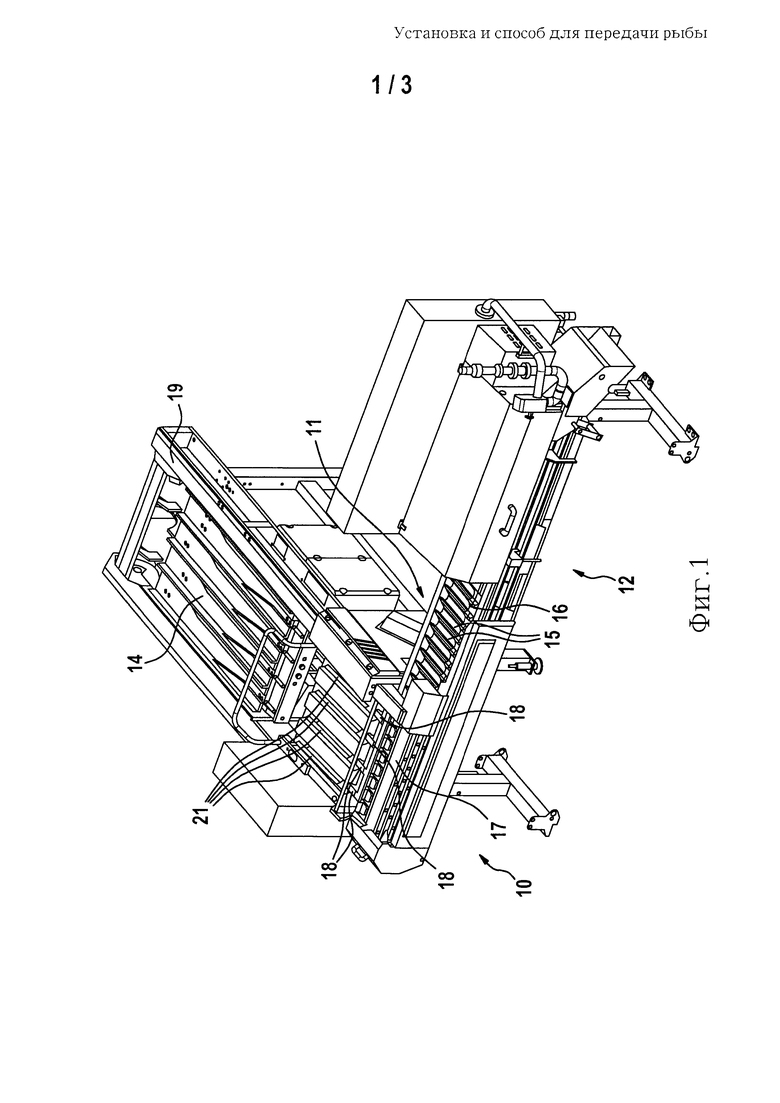
Фиг. 1 изображает вид в аксонометрии варианта выполнения установки согласно изобретению, в комбинации с рыбообрабатывающей машиной,
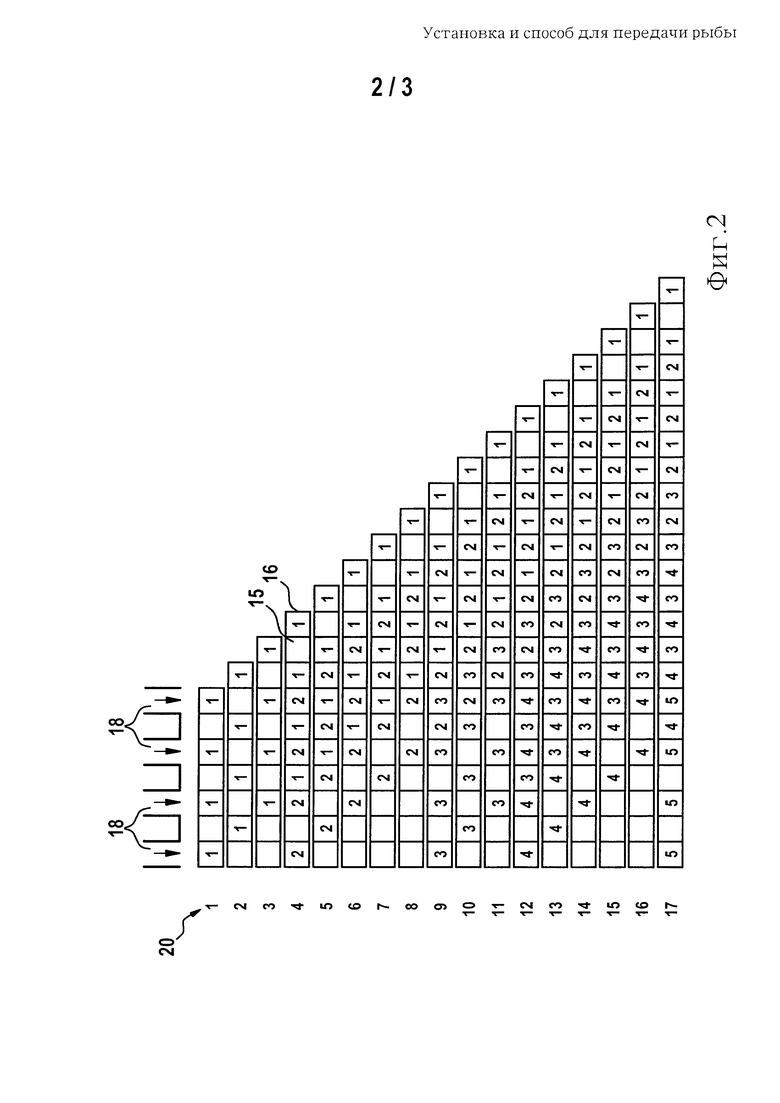
Фиг. 2 изображает схематическое представление распределительных устройств и поперечного конвейера согласно первому варианту и
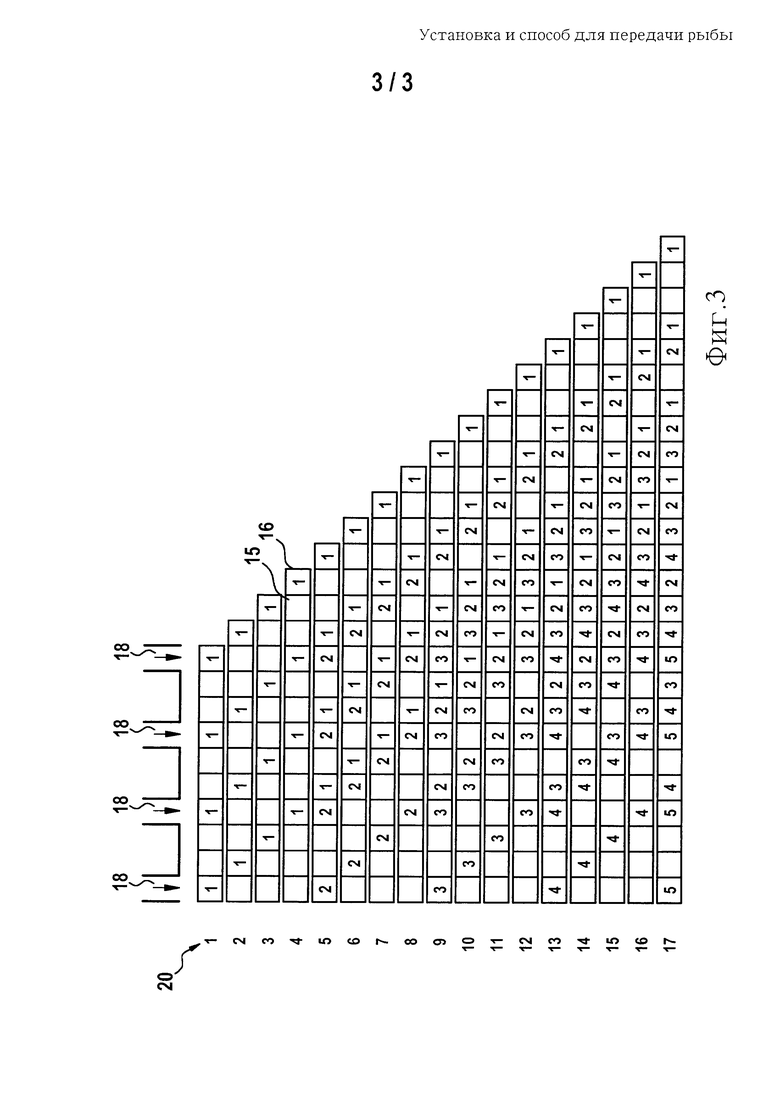
Фиг. 3 изображает схематическое представление распределительных устройств и поперечного конвейера согласно второму варианту.
Фиг. 1 показывает в качестве примера вариант выполнения предложенной установки 10 для передачи рыбы, транспортируемой в продольном направлении, в поперечное транспортирующее устройство 11. Кроме того, фиг. 1 показывает в качестве примера указанную установку для передачи рыбы в рыбообрабатывающую машину 12. Машина 12 предпочтительно выполнена в виде головоотсекающей машины, предназначенной для удаления голов у рыбы. Настоящее изобретение, однако, не ограничивается только подачей рыбы посредством поперечного транспортирующего устройства 11 в головоотсекающую машину, а по существу подходит для других рыбообрабатывающих машин 12.
Изначально неотсортированная рыба (не показана на чертеже) подается через подающие средства соответствующей конфигурации к средствам 14 для продольного выравнивания. Средства 14 для продольного выравнивания одновременно предназначены для транспортировки рыбы в продольном направлении. Продольное направление рыбы является направлением от головы к хвосту. Особенно предпочтительно, чтобы рыба транспортировалась в продольном направлении головой вперед.
Установка 10 для передачи рыбы в поперечное транспортирующее устройство 11 описана более подробно ниже и используется для передачи рыбы в указанное поперечное транспортирующее устройство. Поперечное транспортирующее устройство 11 предпочтительно образует механизм, подающий рыбу в рыбообрабатывающую машину 12.
Поперечное транспортирующее устройство 11 содержит приемные элементы 15, которые предназначены и выполнены для индивидуального приема рыбы. Приемные элементы 15, предпочтительно имеющие форму желоба, образуют поперечный конвейер 16, который предпочтительно выполнен как вращающийся бесконечный конвейер.
На поперечном конвейере 16 расположено приводное средство (не показано на чертеже), посредством которого конвейер 16 непрерывно приводится в движение. Другими словами, устройство 11 выполнено так, что, по меньшей мере в стационарном режиме работы, приемные элементы 15 перемещаются с постоянной скоростью.
В области 17 передачи расположены по меньшей мере два распределительных устройства 18. Количество распределительных устройств 18 обозначено через m. Распределительные устройства 18 расположены на одинаковом расстоянии друг от друга, и каждое из них выходит в приемный элемент 15. Среднее расстояние между распределительными устройствами 18 составляет, по меньшей мере, n × ширина приемных элементов 15. Другими словами, положение распределительных устройств 18 и ширину приемных элементов 15 выбирают так, что в каждом случае, в целом группа из n приемных элементов 15 расположены между двумя соседними распределительными элементами 18. Число n, следовательно, обозначает количество приемных элементов 15, приходящееся на распределительное устройство 18, тогда как число m обозначает общее количество распределительных устройств 18.
С каждым распределительным устройством 18 предпочтительно связано питающее устройство 19. Питающие устройства 19 преимущественно содержат питающие средства, упоминаемые выше. Питающие устройства 19 предназначены для подачи рыбы в распределительные устройства 18 в продольном направлении.
Установка 10 согласно изобретению, кроме того, содержит управляющее устройство, не показанное на чертежах. Управляющее устройство предпочтительно является контроллером на базе микропроцессора. Управляющее устройство соединено с приводными средствами и с распределительными устройствами 18 и предназначено и выполнено для управления распределительными устройствами 18. Управляющее устройство, кроме того, предпочтительно предназначено для задания скорости транспортировки поперечного конвейера 16.
Управляющее устройство, кроме того, регулируется для обеспечения передачи рыбы, отдельно удерживаемой в распределительных устройствах 18, в приемные элементы 15, в которые рыба передается в определенные моменты передачи из распределительных устройств 18 в приемные элементы 15 под управлением управляющего устройства, при условии, что приемные элементы 15 находятся в соответствующем положении передачи.
Посредством управляющего устройства, передача выполняется циклически, с одной стороны, т.е. одна за другой, но также периодически, с другой стороны. Передача, следовательно, не происходит в каждый возможный момент передачи, когда приемные элементы 15 находятся в положении передачи, но с несколько большим временным интервалом в каждом случае. Этот интервал времени между любыми двумя последовательными моментами передачи составляет, по меньшей мере, n+1 питающих циклов 20 в каждом случае. Питающий цикл 20 представляет собой период времени, необходимый для перемещения приемных элементов 15 на ширину одного из указанных элементов 15. В течение питающего цикла 20 приемные элементы 15, следовательно, продвигаются только на их собственную ширину.
Особенно предпочтительно, когда распределительные устройства 18 и управляющее устройство выполнены таким образом, что в каждом случае передача рыбы, удерживаемой в распределительных устройствах 18, происходит одновременно. Другими словами, рыба одновременно передается в m из n приемных элементов 15 в каждом случае.
Управляющее устройство преимущественно содержит первый тактовый генератор и второй тактовый генератор для управления распределительными устройствами 18. Первый и второй тактовые генераторы выполнены таким образом, что передача рыбы выполняется попеременно с первым временным интервалом и вторым временным интервалом между последовательными моментами передачи в каждом случае. Для этого первый тактовый генератор регулируется, чтобы установить первый временной интервал как n+1 циклов 20. Второй тактовый генератор соответственно регулируется так, чтобы установить второй временной интервал как n⋅(m-1)-1 циклов 20.
Другими словами, тактовые генераторы выполнены таким образом, что, после передачи рыбы из распределительных устройств 18, вначале проходят n+1 питающих циклов 20, во время которых дальнейшей передачи рыбы не происходит. После истечения n+1 циклов 20, второй тактовый генератор управляющего устройства инициирует затем следующую передачу рыбы из распределительных устройств 18 в пустые приемные элементы 15. Перед тем, как циклы начнутся снова, следуют n⋅(m-1)-1 питающих циклов 20, в которых не происходит передачи рыбы.
Фиг. 2 показывает схематическое представление распределительных устройств 18 и поперечного конвейера 16 согласно первому варианту выполнения. Согласно этому предпочтительному варианту выполнения, число m равно четырем, так что четыре распределительных устройства 18 расположены в области 17 передачи. Расстояние между любыми двумя распределительными устройствами составляет удвоенную ширину приемных элементов 15. Число n приемных элементов 15, следовательно, равно двум. Питающие циклы 20 пронумерованы последовательно строка за строкой от 1 до 17 для ясности. Для облегчения иллюстрации, способ согласно изобретению, по существу, описан ниже. Все положения также применимы аналогично к описанию управляющего устройства согласно изобретению и к предложенным установкам.
Прежде всего, в каждый приемный элемент 15, находящийся в положении передачи, подается рыба, удерживаемая в распределительных устройствах 18, посредством передачи, и затем продвигается на ширину одного из указанных элементов 15 в направлении транспортировки поперечного конвейера, т.е. вправо на фиг. 2, путем непрерывной транспортировки. Приемные элементы 15, в которых находится рыба, в первом подающем цикле 20 обозначены на фиг. 2 цифрой 1. В двух дальнейших подающих циклах 20, обозначенных цифрами 2 и 3, приемные элементы 15 транспортируются непрерывно, прежде чем рыба, обозначенная цифрой 2, будет передана во второй раз в приемные элементы 15 в четвертом питающем цикле 20. Включая четвертый питающий цикл 20, общее количество из пяти питающих циклов 20 последует, прежде чем будет передана рыба, обозначенная цифрой 3. Здесь последовательность начинается опять в циклической манере.
Согласно изобретению, попеременная передача с первым временным интервалом n+1=3 питающих цикла и вторым временным интервалом
n⋅(m-1)-1=2⋅(4-1)-1=5
питающих циклов, посредством первого и второго тактовых генераторов управляющего устройства, приводит, за исключением стартовой фазы, к заполнению приемных элементов 15 конвейера 16, когда отсутствуют перерывы в заполнении.
Фиг. 3 показывает еще один предпочтительный вариант выполнения. Иллюстрация на фиг. 3 соответствует, по существу, иллюстрации на фиг. 2, но с той разницей, что расстояние между любыми двумя распределительными устройствами 18 составляет тройную ширину приемных элементов 15. Число n приемных элементов 15, следовательно, равно трем. Результирующий временной интервал n+1=3+1=4 питающим циклам 20. Как можно видеть из фиг. 3, за исключением стартовой фазы, свободное от перерывов заполнение приемных элементов 15 поперечного конвейера гарантируется, при условии, что передача рыбы из распределительных устройств 18 происходит каждый четвертый питающий цикл.
В альтернативном случае, можно также выполнять передачу поочередно. В этом случае первый временной интервал составляет n+1=4 питающим циклам, в то время как второй временной интервал составляет
n⋅(m-1)-1=3⋅(4-1)-1=8 питающим циклам 20. В этом альтернативном варианте, не показанном на чертежах, некоторые приемные элементы 15 остаются пустыми, так что приемные элементы 15 поперечного конвейера не заполняются без перерывов.
Варианты, описанные выше, не являются исчерпывающими, но используются единственно как иллюстративные примеры предложенных установок и способа. Настоящее изобретение, следовательно, содержит все установки и способы, в которых распределительные устройства 18 используются в количестве m более чем два и два или более приемных элементов 15 приходятся на одно распределительное устройство 18.
Более предпочтительно, распределительные устройства 18 содержат ускоряющие блоки 21. Ускоряющие блоки 21 предназначены и выполнены для ускорения рыбы, удерживаемой в распределительных устройствах 18. Например, ускоряющие блоки содержат вращающиеся конвейерные ленты с движителями, которые взаимодействуют с рыбой, чтобы ускорять ее. Как описано вначале, особенно важно ускорить рыбу до определенной максимальной скорости и уменьшить мгновенную скорость перед достижением соответствующего времени передачи, таким образом, уменьшить, соответственно, скорость приводных устройств. Благодаря инерции массы, рыба продолжает, по существу, скользить при достигнутой максимальной скорости. Благодаря уменьшенной мгновенной скорости приводов, по сравнению с рыбой, связь между приводом и рыбой становится в значительной степени свободной от силы, и рыба, соответственно, мягко высвобождается из каждого ускоряющего блока.
Управляющее устройство преимущественно содержит, по меньшей мере, один генератор положения. Генератор положения присоединен к управляющему устройству для задания положения, по меньшей мере, одного приемного элемента 18.
Управляющее устройство, кроме того, предпочтительно содержит управляющие средства, которые предназначены для определения опережения по времени для ускорения рыбы, удерживаемой в распределительных устройствах 18, посредством ускоряющих блоков. Управляющие средства спроектированы таким образом, что они определяют опережение по времени с учетом положения распределительного устройства 18, определенного посредством генератора положения, причем опережение необходимо для ускорения удерживаемой рыбы до окончательной скорости, требуемой для передачи в приемные элементы 15.
Ускоряющие блоки 21 предпочтительно присоединены к устройству управления ускорением, которое предназначено для такого управления ускоряющими блоками 21, что удерживаемая рыба ускоряется с учетом опережения, определяемого с использованием управляющих средств, и достигает требуемой скорости выброса в один из подходящих моментов передачи.
Особенно предпочтительно, чтобы в устройстве управления ускорением хранился соответствующий профиль ускорения. Например, качественная хронологическая последовательность ускорения, воздействующего посредством ускоряющих блоков на удерживаемую рыбу, хранят как профиль ускорения. Максимальное ускорение, которого нужно достичь, определяется заданной конкретной скоростью выброса.
Далее, предпочтительно, чтобы хронологическая последовательность профиля ускорения от начала ускорения удерживаемой рыбы до достижения скорости выброса была монотонно или строго монотонно возрастающей.
Изобретение относится к установке (10) для передачи рыбы, транспортируемой в продольном направлении, в поперечное транспортирующее устройство (11), к соответствующему способу и к установке для передачи рыбы в рыбообрабатывающую машину посредством указанной установки (10). Установка (10) содержит управляющее устройство, посредством которого рыба циклически периодически передаётся из распределительных устройств (18) в приёмные элементы (15) поперечного транспортирующего устройства (11). Изобретение обеспечивает автоматическую передачу рыбы от продольного направления в поперечное транспортирующее устройство. 3 н. и 8 з.п. ф-лы, 3 ил.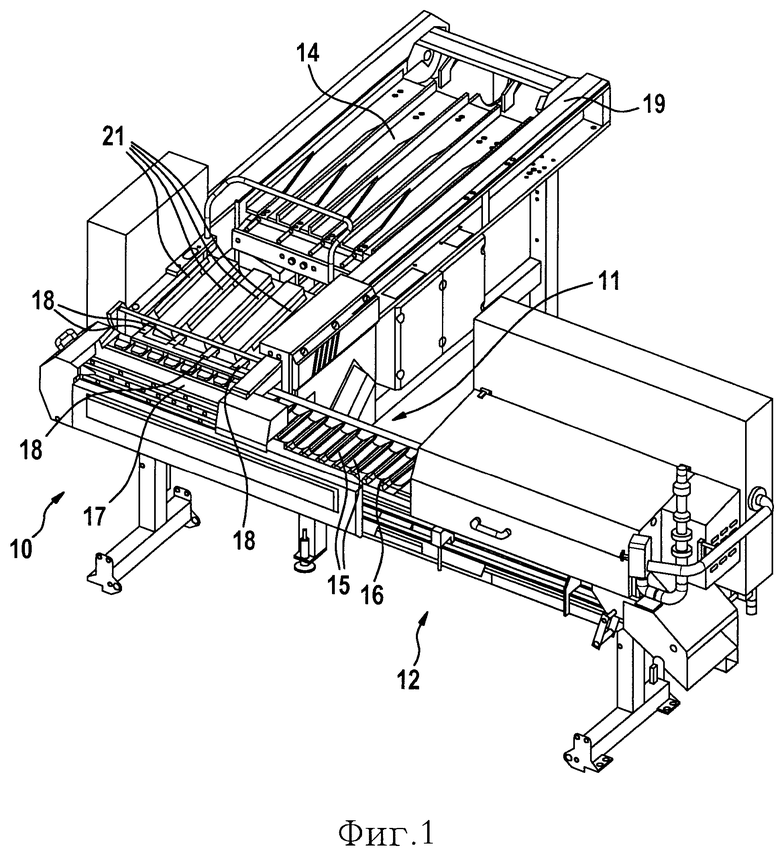
1. Установка (10) для передачи рыбы, транспортируемой в продольном направлении, в поперечное транспортирующее устройство (11),
причем поперечное транспортирующее устройство (11) содержит приемные элементы (15), образующие поперечный конвейер (16), для индивидуального приема передаваемой рыбы и приводные средства, расположенные на указанном поперечном конвейере (16), для непрерывной транспортировки приемных элементов (15), и в области (17) передачи, средний размер которой соответствует по меньшей мере ширине по меньшей мере двух приемных элементов (15) в количестве n, расположены по меньшей мере два распределительных устройства (18) в количестве m, расположенных на равных расстояниях, для передачи рыбы в приемные элементы (15),
причем установка (10) содержит питающие устройства (19), предназначенные для каждого распределительного устройства (18) и выполненные с возможностью подачи рыбы в распределительные устройства (18) в продольном направлении, и управляющее устройство, присоединенное к приводным средствам и распределительным устройствам (18) и выполненное с возможностью управления распределительными устройствами (18) таким образом, что рыба, удерживаемая в распределительных устройствах (18), передается в приемные элементы (15), находящиеся в положении передачи, одновременно в определенные моменты передачи, причем передача посредством управляющего устройства выполняется циклически и периодически, так что временной интервал между двумя последовательными моментами передачи составляет по меньшей мере n+1 питающих циклов (20) в каждом случае, причем питающий цикл (20) представляет собой период времени, необходимый для перемещения приемных элементов (15) на ширину одного из указанных приемных элементов (15).
2. Установка по п. 1, отличающаяся тем, что управляющее устройство для управления распределительными устройствами (18) содержит первый тактовый генератор и второй тактовый генератор, которые выполнены таким образом, что передача выполняется попеременно с образованием первого временного интервала и второго временного интервала между последовательными моментами передачи в каждом случае, причем первый тактовый генератор выполнен с возможностью задания первого временного интервала как n+1 питающих циклов (20), а второй тактовый генератор выполнен с возможностью задания второго временного интервала как n⋅(m-1)-1 питающих циклов (20).
3. Установка по п. 1 или 2, отличающаяся тем, что распределительные устройства (18) содержат ускоряющие блоки (21) для ускорения удерживаемой рыбы, при этом управляющее устройство соединено с по меньшей мере одним генератором положения для определения положения по меньшей мере одного приемного элемента (15), причем установка дополнительно содержит управляющие средства, которые выполнены с возможностью определения опережения для ускорения рыбы, удерживаемой в распределительных устройствах (18), посредством ускоряющих блоков на основе положения приемного элемента (15), при этом управляющее устройство содержит устройство управления ускорением, которое присоединено к ускоряющим блокам и управляет ими таким образом, что удерживаемая рыба ускоряется с учетом опережения по времени и достигает требуемой скорости выброса в соответствующий момент передачи.
4. Установка по одному из пп. 1-3, отличающаяся тем, что в устройстве управления ускорением хранится профиль ускорения, и устройство управления ускорением выполнено с возможностью управления ускоряющими блоками согласно указанному установленному профилю ускорения.
5. Установка по п. 4, отличающаяся тем, что временная кривая профиля ускорения с начала ускорения удерживаемой рыбы до достижения скорости выброса является монотонно или строго монотонно возрастающей.
6. Установка для передачи рыбы в рыбообрабатывающую машину (12), содержащая питающее устройство для подачи неотсортированной рыбы, средства (14) для выравнивания рыбы по длине и ее транспортировки в продольном направлении и установку (10) для передачи рыбы, транспортируемой в продольном направлении, в поперечное транспортирующее устройство (11) по любому из пп. 1-5, причем поперечное транспортирующее устройство (11) образует питатель указанной машины (12).
7. Способ передачи рыбы, транспортируемой в продольном направлении, в поперечное транспортирующее устройство (11), которое содержит приемные элементы (15), образующие поперечный конвейер (16), для индивидуального приема переданной рыбы, причем в области (17) передачи, средний размер которой соответствует по меньшей мере ширине по меньшей мере двух приемных элементов (15) в количестве n, расположены по меньшей мере два распределительных устройства (18) в количестве m, расположенных на равных расстояниях, для передачи рыбы в приемные элементы (15), при этом способ включает:
- подачу по меньшей мере двух рыб в количестве m путем транспортировки рыбы в продольном направлении в соответствующие распределительные устройства (18),
- непрерывную транспортировку приемных элементов (15) в поперечном направлении транспортировки,
- одновременную передачу рыбы, удерживаемой в распределительных устройствах (18), в приемные элементы (15), находящиеся в положении передачи, в определенные моменты передачи,
причем питающий цикл представляет собой период времени, необходимый для перемещения приемных элементов (15) на ширину одного из них (15), и передачу выполняют циклически и периодически, так что временной интервал между любыми двумя последовательными моментами передачи составляет, по меньшей мере, n+1 питающих циклов.
8. Способ по п. 7, отличающийся тем, что передачу выполняют попеременно с первым временным интервалом и вторым временным интервалом между последовательными моментами передачи в каждом случае, причем первый временной интервал составляет n+1 питающих циклов (20), а второй временной интервал составляет n⋅(m-1)-1 питающих циклов (20).
9. Способ по любому из предыдущих пунктов, в котором определяют положение, по меньшей мере, одного из приемных элементов (15), определяют опережение по времени для ускорения рыбы, удерживаемой в распределительных устройствах (18), на основе положения приемного элемента (15) и ускоряют удерживаемую рыбу с учетом опережения по времени, так что рыба достигает требуемой скорости выброса в соответствующий момент передачи.
10. Способ по п. 9, отличающийся тем, что ускорение удерживаемой рыбы осуществляют посредством заданного профиля ускорения.
11. Способ по п. 10, отличающийся тем, что временная кривая профиля ускорения от начала ускорения удерживаемой рыбы до достижения скорости выброса является монотонно или строго монотонно возрастающей.
| СТЕНД ДЛЯ РАСШИВКИ РЕЛЬСОВЫХ ЗВЕНЬЕВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 0 |
|
SU384956A1 |
| DE 19511489 A1, 02.10.1996 | |||
| КОРРОЗИОННОСТОЙКИЙ СПЛАВ | 2017 |
|
RU2672647C1 |
| Стенд для испытаний пружин на усталость | 1981 |
|
SU953518A1 |
| DE 1292338 B, 10.04.1969 | |||
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ РЫБЫ | 1996 |
|
RU2104647C1 |

