ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к обследованию воздушного летательного аппарата. В частности, раскрытые варианты реализации настоящего изобретения относятся к системам и способам извлечения информации о воздушном летательном аппарате из бортовых меток радиочастотной идентификации (RFID).
УРОВЕНЬ ТЕХНИКИ
[002] Конфигурации воздушного летательного аппарата могут изменяться в процессе изготовления по нескольким причинам. По мере падения доходов от реализации воздушного летательного аппарата может изменяться линия для его сборки. Эти конструктивные изменения могут представлять собой результат изменений в конструкторских расчетах, доступности новых строительных наборов, изменения требований потребителей, федеральных постановлений, включая модификации, повышение категории безопасности или другие факторы. Таким образом, может быть сложно определить «заводскую» конфигурацию готового воздушного летательного аппарата, причем сложность увеличивается при увеличении уровня сложности конструкции воздушного летательного аппарата. Кроме того, заводская конфигурация может и не совпадать с любой из потенциального множества версий предполагаемых проектных спецификаций или необходимых конфигураций. Конфигурации воздушного летательного аппарата, после их создания, изменяются в процессе осуществления технического обслуживания вследствие ремонта или обновления компонентов этого воздушного летательного аппарата.
[003] Существующие решения этой проблемы включают визуальное обследование основных компонентов и деталей. Доступ к деталям или частям может быть затруднен, а на процесс визуального обследования может затрачиваться много времени, при этом он может быть предрасположен к ошибкам. Например, визуальное обследование может потребовать использования смотровых платформ и средств защиты для физического достижения некоторых компонентов и/или получения доступа к ним. Эти выполняемые вручную попытки получения физической конфигурации могут привести к возникновению человеческих ошибок при копировании данных, например при наличии отвлекающих факторов во время обследования. Другие технические решения могут включать ручное исследование записей, которые велись во время изготовления, что является потенциально трудоемким процессом. Кроме того, эти записи могут храниться у многочисленных поставщиков и в том или ином случае могут быть ненадежными. Без наличия точной своевременно обновленной конфигурации, перед пользователями, использующими заводскую конфигурацию или конфигурацию после технического обслуживания, в дальнейшем встанет проблема осуществления технического обслуживания и получения точной описи запасных частей.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[004] Система осмотра воздушного летательного аппарата для определения информации о воздушном летательном аппарате может содержать беспилотный летательный аппарат (UAV или БПЛА) и опорную станцию. Беспилотный летательный аппарат (UAV) может содержать считывающее устройство радиочастотной идентификации (RFID), контроллер беспилотного летательного аппарата (UAV) и приемопередатчик беспилотного летательного аппарата (UAV). Считывающее устройство радиочастотной идентификации может быть выполнено с возможностью считывания метки радиочастотной идентификации, находящейся на воздушном летательном аппарате в идентифицированном месте, причем метка радиочастотной идентификации может иметь идентифицирующие данные, связанные с воздушным летательным аппаратом. Контроллер беспилотного летательного аппарата (UAV) может быть выполнен с возможностью приема карты расположения меток радиочастотной идентификации воздушного летательного аппарата и с возможностью генерации навигационных сигналов по меньшей мере частично на основании карты расположения меток радиочастотной идентификации для перемещения рядом с идентифицированным местом. Приемопередатчик беспилотного летательного аппарата (UAV) может быть выполнен с возможностью связи с контроллером беспилотного летательного аппарата (UAV), а также может беспроводным образом принимать и передавать данные. Опорная станция может содержать систему связи, контроллер опорной станции, функционально соединенный с системой связи, и запоминающее устройство для хранения данных, функционально соединенное с контроллером опорной станции. Система связи может быть выполнена с возможностью беспроводной связи с беспилотным летательным аппаратом (UAV). Контроллер опорной станции может быть выполнен с возможностью приема карты расположения меток радиочастотной идентификации воздушного летательного аппарата и с возможностью ее передачи на беспилотный летательный аппарат (UAV). Контроллер опорной станции также может быть дополнительно выполнен с возможностью приема связанных со считыванием данных от беспилотного летательного аппарата (UAV). Связанные со считыванием данные могут содержать идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в местоположении метки радиочастотной идентификации. Контроллер опорной станции может быть выполнен с возможностью определения информации о воздушном летательном аппарате на основании связанных со считыванием данных.
[005] Способ определения информации о воздушном летательном аппарате может включать прием на опорной станции карты расположения меток радиочастотной идентификации воздушного летательного аппарата и передачу указанной карты расположения меток радиочастотной идентификации воздушного летательного аппарата на беспилотный летательный аппарат (UAV). Способ может включать генерирование навигационных сигналов посредством беспилотного летательного аппарата (UAV) по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящих для управления перемещением беспилотного летательного аппарата (UAV) рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в местоположении метки радиочастотной идентификации, причем метка радиочастотной идентификации имеет идентифицирующие данные, связанные с воздушным летательным аппаратом. Способ может включать прием, посредством опорной станции, связанных со считыванием данных от беспилотного летательного аппарата (UAV). Связанные со считыванием данные могут содержать идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в местоположении метки радиочастотной идентификации. Способ может включать определение на опорной станции информации о воздушном летательном аппарате на основании связанных со считыванием данных.
[006] Компьютерный программный продукт может содержать первый машиночитаемый носитель для хранения данных, содержащий первую совокупность встроенных в него машиночитаемых программных инструкций, и второй машиночитаемый носитель для хранения данных, содержащий вторую совокупность встроенных в него машиночитаемых программных инструкций. Первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором опорной станции, может настроить опорную станцию принимать карту расположения меток радиочастотной идентификации воздушного летательного аппарата и передавать указанную карту расположения меток радиочастотной идентификации воздушного летательного аппарата на беспилотный летательный аппарат (UAV). Первая совокупность компьютерных инструкций может дополнительно настроить опорную станцию принимать связанные со считыванием данные от беспилотного летательного аппарата (UAV), содержащие идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в местоположении метки радиочастотной идентификации, а также определять информацию о воздушном летательном аппарате на основании связанных со считыванием данных. Вторая совокупность машиночитаемых программных инструкций, при их исполнении вторым процессором беспилотного летательного аппарата (UAV), может настроить беспилотный летательный аппарат (UAV) принимать карту расположения меток радиочастотной идентификации от опорной станции и генерировать навигационные сигналы по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации. Навигационные сигналы могут подходить для управления перемещением беспилотного летательного аппарата (UAV) рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в местоположении метки радиочастотной идентификации, причем метка радиочастотной идентификации может иметь идентифицирующие данные, связанные с воздушным летательным аппаратом.
[007] Настоящее изобретение обеспечивает различные аппараты, системы, способы применения и компьютерные программные продукты. В некоторых вариантах реализации система может содержать беспилотный летательный аппарат (UAV) и опорную станцию, а также может быть выполнена с возможностью определения информации о воздушном летательном аппарате. В некоторых вариантах реализации система может определять информацию о воздушном летательном аппарате по меньшей мере частично автономно.
[008] Признаки, функции и преимущества могут быть достигнуты независимо друг от друга в различных вариантах реализации настоящего изобретения или могут быть объединены еще в одних вариантах реализации, дополнительные сведения о которых можно найти со ссылкой на приведенный далее раздел «Осуществление изобретения» и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] На ФИГ. 1 схематически показан вид системы осмотра воздушного летательного аппарата, содержащей иллюстративный беспилотный летательный аппарат (UAV) и иллюстративную опорную станцию, причем данный вид иллюстрирует пример маршрута осмотра беспилотного летательного аппарата (UAV), проходящий рядом с воздушным летательным аппаратом.
[0010] На ФИГ. 2 показана структурная схема еще одного примера системы осмотра воздушного летательного аппарата.
[0011] На ФИГ. 3 показано изображение операций, выполняемых в примере определения информации о воздушном летательном аппарате.
[0012] На ФИГ. 4 показан пример выходных данных, отображаемых пользователю, что иллюстрирует пример результатов осмотра воздушного летательного аппарата.
[0013] На ФИГ. 5 схематически показана схема различных компонентов примера системы обработки данных.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Обзор
[0014] Различные варианты реализации системы осмотра воздушного летательного аппарата, содержащего беспилотный летательный аппарат (UAV) и опорную станцию, и соответствующего способа, описаны ниже и показаны на соответствующих чертежах. Если только специально не указано иное, система осмотра воздушного летательного аппарата и/или ее различные компоненты могут содержать, но не обязательно, по меньшей мере одно из следующего: структура, компоненты, функциональные возможности и/или изменения, описанные в настоящем документе, показанные в этом документе и/или введенные в него. Кроме того, структуры, компоненты, функциональные возможности и/или изменения, описанные в настоящем документе и/или введенные в этот документ вместе с настоящими идеями, могут быть, но не обязательно, включены в другие системы обследования. Приведенное далее описание различных вариантов реализации является по существу иллюстративным и никоим образом не предназначено для ограничения настоящего изобретения, его применения или использования. Кроме того, преимущества, обеспечиваемые вариантами реализации, описанными ниже, по существу являются иллюстративными, и не все варианты реализации обеспечивают те же самые преимущества или тот же самый уровень преимущества.
[0015] Аспекты системы осмотра воздушного летательного аппарата могут быть реализованы в виде компьютерного способа, компьютерной системы или компьютерного программного продукта. Соответственно, аспекты воздушного летательного аппарата система осмотра могут иметь вариант реализации, осуществленный полностью из аппаратных средств, вариант реализации, осуществленный полностью из программных средств (включая программно-аппаратные средства, резидентное программное обеспечение, микрокод и т.п.), или вариант реализации, объединяющий аппаратные и программные средства, причем все они могут в целом называться в настоящем документе как «схема», «модуль» или «система». Кроме того, аспекты воздушного летательного аппарата система осмотра могут быть выполнены в виде компьютерного программного продукта, размещенного на машиночитаемом носителе (или носителях), имеющей размещенные в ней машиночитаемый программный код и/или машиночитаемые инструкции.
[0016] Может быть использовано любое сочетание машиночитаемых носителей. Машиночитаемые носители могут представлять собой машиночитаемый носитель для передачи сигналов и/или машиночитаемый носитель для хранения данных. Машиночитаемый носитель для хранения данных может содержать электронную, магнитную, оптическую электромагнитную, инфракрасную и/или полупроводниковую систему, аппарат или устройство или любое подходящее их сочетание. Более конкретные примеры машиночитаемого носителя данных могут содержать следующее: электрическое соединение, имеющее один или более проводов, дискета для портативного компьютера, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флеш-память), оптоволокно, портативное оперативное запоминающее устройство на компакт-диске (CD-ROM), оптическое запоминающее устройство, магнитное запоминающее устройство, любое подходящее сочетание из этих устройств и/или т.п. В контексте настоящего изобретения машиночитаемый носитель для хранения данных может содержать любой подходящий материальный носитель, который может содержать или хранить программу для их использования системой исполнения инструкций, аппаратом или устройством или использования применительно к системе исполнения инструкций, аппарату или устройству.
[0017] Машиночитаемый носитель для передачи сигналов может содержать распространяемый сигнал данных со встроенным в него машиночитаемым программным кодом, например, в полосе частот или в виде части несущей волны. Такой распространяемый сигнал может иметь любую из многочисленных форм, включая, но без ограничения, электромагнитный сигнал, оптический сигнал и/или их любое подходящее сочетание. Машиночитаемый носитель для передачи сигналов может содержать любой машиночитаемый носитель, который не представляет собой машиночитаемый носитель для хранения данных и которая выполнен с возможностью передачи, распространения или транспортировки программы для ее использования системой исполнения инструкций, аппаратом или устройством или использования применительно к системе исполнения инструкций, аппарату или устройству.
[0018] Программный код, размещенный на машиночитаемом носителе, может быть передан с использованием любого подходящего наличия, включая, но без ограничения, беспроводные средства, проводные средства, волоконно-оптический кабель, радиочастоту и/или т.п., и/или их любую подходящую комбинацию.
[0019] Компьютерный программный код для исполнения операций аспектов системы осмотра воздушного летательного аппарата может быть написан на одном из языков программирования или любой комбинации языков программирования, содержащих объектно-ориентированный язык программирования, такой как «Java», «Smalltalk», «С++» и/или т.п., и обычные процедурные языки программирования, такие как язык программирования «С». Программный код может исполнять полностью на пользовательском компьютере, частично на пользовательском компьютере, в виде отдельно действующего пакета программ, частично на пользовательском компьютере и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с пользовательским компьютером через сеть любого типа, включая локальную вычислительную сеть (LAN), глобальную вычислительную сеть (WAN) или беспроводное соединение типа «Bluetooth» и/или соединение может быть реализовано с внешним компьютером (например, через сеть Интернет с использованием поставщика услуг в сети Интернет).
[0020] Аспекты воздушного летательного аппарата система осмотра описаны ниже со ссылкой на изображения блок-схем и/или структурных схем способов, аппаратов, систем и/или компьютерных программных продуктов. Каждый блок и/или комбинация блоков в блок-схеме и/или структурной схеме могут быть реализованы посредством компьютерных программных инструкций. Компьютерные программные инструкции могут быть выданы на процессор компьютера общего назначения, компьютер специального назначения или другое программируемое устройство обработки данных для создания машины таким образом, что инструкции, которые исполняются посредством процессора компьютера или другого программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
[0021] Эти компьютерные программные инструкции также могут быть сохранены на машиночитаемом носителе, который может управлять компьютером, другим программируемым устройством обработки данных и/или другим устройством таким образом, что они функционируют конкретным образом, так что инструкции, хранящиеся в машиночитаемом носителе, создают промышленное изделие, содержащее инструкции, которые реализуют функцию/действие, указанные в блоке или блоках структурной схемы и/или блок-схемы.
[0022] Компьютерные программные инструкции также могут быть загружены на компьютер, другое программируемое устройство обработки данных и/или другое устройство с тем, чтобы вызвать выполнение серий необязательных этапов на устройстве для создания реализуемого с помощью компьютера процесса таким образом, что инструкции, которые исполняются на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
[0023] Каждая блок-схема и/или структурная схема на чертежах предназначены для иллюстрации архитектуры, функциональных возможностей и/или работы возможных реализаций систем, способов и компьютерных программных продуктов согласно аспектам системы осмотра воздушного летательного аппарата. Таким образом, каждый блок может представлять модуль, сегмент или часть кода, который содержит одну или более исполняемых инструкций для реализации специальной логической функции или специальных логических функций. В некоторых реализациях функции, указанные в блоке, могут исполняться в порядке, отлично от порядка, показанного на чертежах. Например, два блока, показанных последовательно, фактически могут быть исполнены по существу одновременно или эти блоки иногда могут быть исполнены в обратном порядке в зависимости от предусмотренных функциональных возможностей. Каждый блок и/или каждая комбинация блоков могут быть реализованы системами специального назначения на основе аппаратных средств (или комбинаций инструкций аппаратных средств специального назначения и компьютерных инструкций), которые выполняют специальные функции или действия.
Примеры, компоненты и альтернативные варианты
[0024] В представленных далее разделах описаны выбранные аспекты примера систем осмотра воздушного летательного аппарата, а также соответствующие способы и/или компьютерные программные продукты. Примеры в эти разделах предназначены для иллюстрации, и их не следует интерпретировать как ограничение всего объема настоящего изобретения. Каждый раздел может содержать одно или более отдельных изобретений и/или вытекающей из контекста или релевантной информации, функции и/или структуры.
Пример №1
[0025] В данном примере описана иллюстративная система осмотра воздушного летательного аппарата, показанная на ФИГ. 1.
[0026] На ФИГ. 1 схематически показана система осмотра воздушного летательного аппарата, обозначенная в целом ссылочным номером 100. Система 100 осмотра воздушного летательного аппарата может содержать беспилотный летательный аппарат 102 (UAV) и опорную станцию 104. Беспилотный летательный аппарат 102 может иметь беспроводную связь с опорной станцией. Система 100 осмотра воздушного летательного аппарата может быть выполнена с возможностью обследования или осмотра воздушного летательного аппарата 106. Беспилотный летательный аппарат может лететь вдоль маршрута 108 осмотра рядом с воздушным летательным аппаратом.
[0027] Беспилотный летательный аппарат 102 (UAV) может содержать один или более датчиков 109, таких как камера, чувствительная к видимому свету, датчик приближения, считывающее устройство радиочастотной идентификации (RFID) или другие подходящие датчики. После приведения беспилотного летательного аппарата в действие, он может использовать один из датчиков, такой как камера или датчик приближения, для обнаружения воздушного летательного аппарата, наиболее приближенного к опорной станции. Беспилотный летательный аппарат (UAV) может быть выполнен с возможностью записи одного или более изображений воздушного летательного аппарата и с возможностью передачи сигналов, указывающих на изображение, на опорную станцию. Опорная станция может быть выполнена с возможностью идентификации модели и/или регистрационного номера воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата. Например, изображение может содержать изображение по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата. То есть, воздушный летательный аппарат может иметь буквы и/или номера, идентифицирующие этот воздушный летательный аппарат и написанные, например, на хвостовой части или фюзеляжа этого воздушного летательного аппарата. Еще в одном примере, в котором отсутствуют отметки для идентификации воздушного летательного аппарата на его наружной части, опорная станция может иметь доступ к базе данных, содержащей трехмерные конфигурации множества воздушных летательных аппаратов. Таким образом, опорная станция может распознавать модель воздушного летательного аппарата на основании одного или более изображений наружной части этого воздушного летательного аппарата. База данных, к которой имеет доступ опорная станция, может содержать предварительно определенные маршруты осмотра множества воздушных летательных аппаратов.
[0028] Как только опорная станция идентифицировала воздушный летательный аппарат, который следует осмотреть, она может передавать подходящий маршрут 108 осмотра на беспилотный летательный аппарат (UAV). Опорная станция может передавать на беспилотный летательный аппарат маршрут осмотра, который содержит карту расположения меток радиочастотной идентификации, содержащую идентифицированные местоположения одной или более меток радиочастотной идентификации относительно идентифицированного воздушного летательного аппарата 106. Беспилотный летательный аппарат может иметь бортовой контроллер, содержащий процессор и запоминающее устройство. Контроллер беспилотного летательного аппарата может хранить маршрут 108 осмотра и/или карту расположения меток радиочастотной идентификации в запоминающем устройстве и может генерировать навигационные сигналы для привода одного или более пропеллеров беспилотного летательного аппарата, подходящие для перемещения вдоль маршрута 108 осмотра.
[0029] Беспилотный летательный аппарат 102 (UAV) может иметь считывающее устройство радиочастотной идентификации (RFID). Считывающее устройство радиочастотной идентификации может быть выполнено с возможностью считывания одной или более меток радиочастотной идентификации, находящейся на воздушном летательном аппарате 106 в одном или более идентифицированных местоположений. Метки радиочастотной идентификации могут иметь идентифицирующие данные, связанные с воздушным летательным аппаратом. Например, метка радиочастотной идентификации, нанесенная на воздушный летательный аппарат, может иметь идентифицирующие данные, связанные с воздушным летательным аппаратом, такие как марка и модель самого воздушного летательного аппарата. Еще в одном примере метка радиочастотной идентификации может быть размещена рядом с конкретной деталью, узлом, компонентом или системой воздушного летательного аппарата, а идентифицирующие данные, связанные с воздушным летательным аппаратом, могут быть связаны с конкретной деталью, узлом, компонентом или системой.
[0030] Что касается считывающего устройства радиочастотной идентификации для считывания метки радиочастотной идентификации, беспилотный летательный аппарат 102 (UAV) может перемещаться рядом с идентифицированным местом расположения метки радиочастотной идентификации. Беспилотный летательный аппарат может перемещаться вдоль маршрута 108 осмотра в положение, находящееся рядом с идентифицированным местом расположения метки радиочастотной идентификации находится. Маршрут 108 осмотра может представлять собой непрерывную траекторию, которая может начинаться с опорной станции 104 и которая может заканчиваться в опорной станции 104. В качестве альтернативы маршрут осмотра может начинаться и/или заканчиваться в местоположениях, фиксированных относительно самого воздушного летательного аппарата 106. Например, маршрут осмотра может содержать первое местоположение 110, находящееся рядом с носовой частью 112 воздушного летательного аппарата, которая может содержать первую метку 114 радиочастотной идентификации. Беспилотный летательный аппарат может направляться вдоль маршрута осмотра во множество местоположений, находящихся рядом с идентифицированными местоположениями одной или более меток радиочастотной идентификации. Например, маршрут 108 осмотра может содержать второе местоположение 116, находящееся рядом с хвостовой частью 118 воздушного летательного аппарата, которая может содержать вторую метку 120 радиочастотной идентификации, и третье местоположение 122, находящееся рядом с двигателем 124 воздушного летательного аппарата, который может содержать третью метку 126 радиочастотной идентификации, и т.д.
[0031] Считывающее устройство беспилотного летательного аппарата 102 (UAV) может «считывать» одну или более меток радиочастотной идентификации путем приема идентифицирующих данных, связанных с воздушным летательным аппаратом, от одной или более меток радиочастотной идентификации. Может иметься необходимость в нахождении беспилотного летательного аппарата рядом с соответствующей меткой радиочастотной идентификации для обеспечения ее считывания этим считывающим устройством. Беспилотный летательный аппарат (UAV) может передавать данные беспроводным образом на опорную станцию 104.
[0032] Контроллер опорной станции может быть выполнен с возможностью определения информации о воздушном летательном аппарате на основании данных, принятых от беспилотного летательного аппарата 102 (UAV). Эта информация может относиться к текущей конфигурации воздушного летательного аппарата. Контроллер опорной станции может в дальнейшем сравнить информацию о текущей конфигурации воздушного летательного аппарата с информацией, касающейся необходимой конфигурации воздушного летательного аппарата. Система осмотра воздушного летательного аппарата может генерировать выходные данные или отчет, касающиеся текущей конфигурации воздушного летательного аппарата. Если между текущими и необходимыми конфигурациями имеются какие-либо различия, то система осмотра воздушного летательного аппарата может генерировать выходные данные или отчет, которые необходимо отправить пользователю, что обеспечивает уведомление пользователя о несоответствии. Выходные данные или отчет могут также содержать рекомендацию, такую как замена детали обследование детали. Контроллер опорной станции может генерировать выходные данные для дисплейного устройства для отображения предупредительного сообщения пользователю или для отображения инструкций пользователю для замены установленной детали или обследования детали.
Пример 2:
[0033] В данном примере описана еще одна иллюстративная система осмотра воздушного летательного аппарата, показанная на ФИГ. 2. На ФИГ. 2 показана структурная схема системы осмотра воздушного летательного аппарата, обозначенной в целом ссылочным номером 200. Система 100 осмотра воздушного летательного аппарата, описанная выше, может представлять собой вариант реализации системы 200 осмотра воздушного летательного аппарата. Система 200 осмотра воздушного летательного аппарата может быть выполнена с возможностью определения информации о воздушном летательном аппарате 202. Система 200 осмотра воздушного летательного аппарата может содержать беспилотный летательный аппарат 204 (UAV) и опорную станцию 206.
[0034] Воздушный летательный аппарат 202 может содержать информацию 208, например данные 210 для идентификации модельного ряда, связанные с модельным рядом, и/или регистрационный номер 212 воздушного летательного аппарата. Информация 208 может быть визуально отображена, например, в виде отметок для идентификации воздушного летательного аппарата на хвостовой части воздушного летательного аппарата, на крыле воздушного летательного аппарата или на части фюзеляжа воздушного летательного аппарата. В качестве альтернативы информация 208 может быть зашифрована в метку радиочастотной идентификации, размещенную на воздушном летательном аппарате.
[0035] Воздушный летательный аппарат 202 может содержать одну или более меток 213 радиочастотной идентификации, нанесенных на воздушный летательный аппарат. Одна или более меток из меток радиочастотной идентификации могут быть связаны с деталью, компонентом, узлом или системой воздушного летательного аппарата. Метки радиочастотной идентификации могут содержать идентифицирующие данные, связанные с воздушным летательным аппаратом. Например, воздушный летательный аппарат 202 может содержать первую метку 214 радиочастотной идентификации, связанную с первой деталью, вторую метку 216 радиочастотной идентификации, связанную со второй деталью, N-ую метку 218 радиочастотной идентификации, связанную с N-ой деталью, и т.д. Детали могут быть распределены по всему воздушному летательному аппарату, а каждая метка радиочастотной идентификации, связанная с конкретной деталью, может быть размещена в идентифицированном местоположении, находящемся рядом с соответствующей деталью.
[0036] Метки 214, 216 радиочастотной идентификации могут представлять собой неактивные низкочастотные метки, которые могут иметь диапазон считывания вплоть до трех футов (91,44 см). В качестве альтернативы метки радиочастотной идентификации могут представлять собой пассивные ретрансляторы сверхвысокой частоты (UHF), которые могут иметь диапазон считывания вплоть до пятнадцати футов (4,58 м) или двадцати футов (6,1 м). Пока метки радиочастотной идентификации не считаны считывающим устройством радиочастотной идентификации, они могут быть по существу неактивными. Метки радиочастотной идентификации не обязательно должны быть видны с наружной стороны воздушного летательного аппарата 202. Диапазон считывания любой отдельной метки радиочастотной идентификации может зависеть, среди всего прочего, от положения метки радиочастотной идентификации относительно наружной поверхности воздушного летательного аппарата, компонентов воздушного летательного аппарата, находящихся между местом расположения метки радиочастотной идентификации и наружной поверхностью, и от материалов, используемых для наружной обшивки воздушного летательного аппарата.
[0037] Беспилотный летательный аппарат 204 может иметь систему 224 датчиков, контроллер 226 беспилотного летательного аппарата (UAV), систему связи 228 беспилотного летательного аппарата и движительную систему 230. Система 224 датчиков может иметь множество датчиков, выполненных с возможностью исполнения множества функций. Например, система 224 датчиков может содержать один или более видеодатчиков 232, таких как камера, чувствительная к видимому свету. Камера может быть использована для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата, например информацию 208.
[0038] Система 224 датчиков может содержать считывающее устройство 234 радиочастотной идентификации. Считывающее устройство 234 радиочастотной идентификации может быть выполнено с возможностью считывания меток радиочастотной идентификации, таких как метки 214, 216 радиочастотной идентификации, нанесенные на воздушный летательный аппарат в соответствующих идентифицированных местоположениях и имеющие соответствующие идентифицирующие данные, связанные с воздушным летательным аппаратом. После попытки считать метку радиочастотной идентификации, считывающее устройство 234 радиочастотной идентификации может генерировать связанные со считыванием данные, связанные с меткой радиочастотной идентификации, и/или деталь, связанную с меткой радиочастотной идентификации, и/или сам воздушный летательный аппарат. В некоторых случаях считывающее устройство 234 радиочастотной идентификации может зарегистрировать то, что в идентифицированном местоположении не размещено ни одной метки радиочастотной идентификации, а также может генерировать связанные со считыванием данные, соответствующие отсутствию метки радиочастотной идентификации.
[0039] Система 224 датчиков может содержать другие датчики, такой как датчик приближения 236, который может быть выполнен с возможностью определения расстояния от беспилотного летательного аппарата (UAV) до ближайшего объекта. Другие датчики, которые может содержать система датчиков, представляют собой, например, видеокамеру, инфракрасную камеру, любой другой датчик, выполненный с возможностью обнаружения электромагнитных сигналов на основании частотных диапазонов, отличных от видимого и радиочастотного диапазонов, или датчики, выполненные с возможностью обнаружения звуковых волн. Эти другие возможные датчики в целом указаны на ФИГ. 2 под ссылочным номером 238.
[0040] Контроллер 226 беспилотного летательного аппарата (UAV) может содержать процессор 240 и запоминающее устройство 242. Контроллер 226 беспилотного летательного аппарата может быть функционально соединен с системой 224 датчиков. Контроллер 226 беспилотного летательного аппарата может представлять собой любую подходящую систему обработки данных, такую как, например, система обработки данных, описанная ниже со ссылкой на ФИГ. 5. В частности, запоминающее устройство 242 может быть выполнено с возможностью хранения информации, такой как карта 244 расположения меток радиочастотной идентификации, содержащая одно или более местоположений меток радиочастотной идентификации, маршрут 246 осмотра, один или более результатов 248 считывания метки радиочастотной идентификации и/или любую соответствующую информацию 250 о воздушном летательном аппарате.
[0041] Карта 244 расположения меток радиочастотной идентификации может содержать идентифицированные местоположения одной или более меток 214, 216 радиочастотной идентификации относительно воздушного летательного аппарата 202. Маршрут 246 осмотра может представлять собой маршрут через пространство рядом с воздушным летательным аппаратом, вдоль которого может совершать движение беспилотный летательный аппарат 204. Маршрут осмотра может быть расположен рядом с местоположениями 244 меток радиочастотной идентификации вдоль других местоположений и может быть настроен таким образом, что он предотвращает контакт с воздушным летательным аппаратом при продвижении вдоль маршрута осмотра. Карта расположения меток радиочастотной идентификации и маршрут осмотра могут быть приняты беспилотным летательным аппаратом 204 (UAV) от опорной станции 206. Результаты 248 считывания метки радиочастотной идентификации могут представлять собой данные, связанные с воздушным летательным аппаратом и сгенерированные датчиком 234 радиочастотной идентификации. В случае, в котором метка радиочастотной идентификации связана с компонентом воздушного летательного аппарата, результат считывания радиочастотной идентификации (RFID) может представлять собой данные для идентификации компонента. Информация 250 о воздушном летательном аппарате может соответствовать информации 208 и может соответствовать данным, сгенерированным видеодатчиком 232.
[0042] Беспилотный летательный аппарат 204 (UAV) может содержать систему связи 228 беспилотного летательного аппарата, которая может быть выполнена с возможностью связи с контроллером 226 беспилотного летательного аппарата. Система связи 228 беспилотного летательного аппарата может быть выполнена с возможностью беспроводных приема и передачи данных. Например, система связи 228 беспилотного летательного аппарата может быть выполнена с возможностью беспроводной связи с опорной станцией 206. Система связи 228 беспилотного летательного аппарата может содержать приемопередатчик беспилотного летательного аппарата.
[0043] Движительная система 230 беспилотного летательного аппарата 204 (UAV) может содержать один или более приводов 252 двигателя, выполненных с возможностью привода одного или более соответствующих пропеллерных двигателей 254. Контроллер 226 беспилотного летательного аппарата может быть выполнен с возможностью генерации навигационных сигналов по меньшей мере частично на основании сохраненной информации на основании принятой карты 244 расположения меток радиочастотной идентификации для управления перемещением беспилотного летательного аппарата 204 (UAV) последовательно во множество местоположений меток радиочастотной идентификации. Приводы двигателя 252 могут независимо друг от друга реагировать на управляющие сигналы от контроллера 226 беспилотного летательного аппарата и преобразовывать эти управляющие сигналы в сигналы привода, которые могут приводить соответствующий один или более пропеллерных двигателей 254. В некоторых случаях беспилотный летательный аппарат 204 может иметь несколько пропеллеров, например четыре пропеллера. Путем регулировки сигналов привода, выдаваемых в каждый пропеллерный двигатель 254, может быть отрегулирована выходная мощность каждого пропеллера. Путем регулировки выходной мощности каждого пропеллера можно управлять высотой, положением и траекторией беспилотного летательного аппарата 204 для перемещения этого беспилотного летательного аппарата 204 в одно или более идентифицированных местоположений.
[0044] Опорная станция 206 может выполнять некоторые из функций системы обработки данных, описанной, например, со ссылкой на ФИГ. 5, или их все. Опорная станция 206 может содержать систему 256 связи, контроллер опорной станции или процессор 258, запоминающее устройство 260 для хранения данных и интерфейс 262 ввода-вывода. Контроллер 258 опорной станции может быть функционально соединен с системой 256 связи и запоминающим устройством 260 для хранения данных. Система 256 связи может быть выполнена с возможностью беспроводной связи с беспилотным летательным аппаратом 204 (UAV). То есть, система 256 связи может быть выполнена с возможностью отправки данных на беспилотный летательный аппарат 204 и с возможностью приема данных от беспилотного летательного аппарата 204. Система 256 связи также может быть выполнена с возможностью связи с базой 264 данных.
[0045] Контроллер 258 опорной станции может быть выполнен с возможностью приема, посредством системы 256 связи, сигналов изображения, представляющих изображение по меньшей мере части воздушного летательного аппарата 202, от беспилотного летательного аппарата 204 (UAV). Сигналы изображения могут содержать идентифицирующие данные, связанные с воздушным летательным аппаратом. Контроллер 258 опорной станции может быть выполнен с возможностью идентификации модели и регистрационного номера воздушного летательного аппарата 202 на основании сигналов изображения, принятых от этого беспилотного летательного аппарата 204. Идентифицирующие данные, связанные с воздушным летательным аппаратом, могут содержать данные для идентификации модельного ряда, связанные с модельным рядом воздушного летательного аппарата. Контроллер 258 опорной станции может быть выполнен с возможностью определения модельного ряда воздушного летательного аппарата 202 на основании данных для идентификации модельного ряда. Данные о модели и регистрационном номере могут быть сохранены в виде информации 208 в запоминающем устройстве 260.
[0046] Контроллер 258 опорной станции может быть выполнен с возможностью приема карты 244 расположения меток радиочастотной идентификации воздушного летательного аппарата, например от базы 264 данных или посредством данных, введенных пользователем через интерфейс 262 ввода-вывода, а также может хранить карту 244 расположения меток радиочастотной идентификации в запоминающем устройстве 260. Контроллер 258 опорной станции может быть выполнен с возможностью приема маршрута 246 осмотра воздушного летательного аппарата 202, например от базы 264 данных или посредством данных, введенных пользователем через интерфейс 262 ввода-вывода, и может хранить маршрут осмотра в запоминающем устройстве 260. Контроллер опорной станции может быть выполнен с возможностью передачи карты расположения меток радиочастотной идентификации воздушного летательного аппарата и/или маршрут осмотра, связанный с воздушным летательным аппаратом, на беспилотный летательный аппарат (UAV).
[0047] Контроллер 258 опорной станции может быть выполнен с возможностью приема от беспилотного летательного аппарата 204 (UAV) связанных со считыванием данных 266, которые могут содержать идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки 213 радиочастотной идентификации в определенном для нее месте. Контроллер опорной станции может быть выполнен с возможностью хранения связанных со считыванием данных 266 в запоминающем устройстве 260. Идентифицирующие данные, связанные с воздушным летательным аппаратом, могут представлять собой данные для идентификации компонента, соответствующие индивидуальным признакам компонента, установленного на воздушном летательном аппарате. Контроллер опорной станции может быть выполнен с возможностью определения информации о воздушном летательном аппарате на основании связанных со считыванием данных.
[0048] Контроллер 258 опорной станции может определять конфигурацию 268 при осмотре или текущую конфигурацию 268 воздушного летательного аппарата 202. Конфигурация 268 при осмотре может содержать идентифицирующие данные 266, связанные с воздушным летательным аппаратом, из меток 213 радиочастотной идентификации, которые были считаны считывающим устройством 234 радиочастотной идентификации беспилотного летательного аппарата 204 (UAV). Конфигурация 268 при осмотре может содержать данные, указывающие на то, что метка радиочастотной идентификации не была считана в идентифицированном местоположении, в котором предполагалось наличие метки радиочастотной идентификации на основании карты расположения меток радиочастотной идентификации. Конфигурация 268 при осмотре может быть сохранена в запоминающем устройстве 260. Конфигурация 268 при осмотре может содержать многокомпонентный перечень, в котором первый компонент объекта в перечне представляет собой идентифицированное местоположение метки 213 радиочастотной идентификации, а второй компонент объекта в перечне представляет собой идентификационный номер, соответствующий детали, которая установлена в идентифицированном местоположении.
[0049] Контроллер 258 опорной станции может быть выполнен с возможностью приема данных 270 о необходимой конфигурации воздушного летательного аппарата 202. Данные 270 о необходимой конфигурации могут содержать данные 270 о необходимой конфигурации для каждого местоположения 244 метки радиочастотной идентификации на воздушном летательном аппарате 202. Например, федеральное постановление может потребовать установки конкретного компонента на воздушном летательном аппарате 202, а данные 270 о необходимой конфигурации могут содержать данные, связанные с меткой 213 радиочастотной идентификации, соответствующей этому компоненту. Данные 270 о необходимой конфигурации могут быть сохранены в запоминающем устройстве 260. Данные 270 о необходимой конфигурации могут содержать многокомпонентный перечень, в котором компонент объекта в перечне представляет собой идентифицированное местоположение метки 213 радиочастотной идентификации, а второй компонент объекта в перечне представляет собой идентификационный номер, соответствующий детали, которая необходима в идентифицированном местоположении.
[0050] Контроллер 258 опорной станции может определять, соответствуют ли данные 266 для идентификации компонента, принятые от беспилотного летательного аппарата 204 (UAV), компоненту, который совпадает с данными 270 о необходимой конфигурации. Контроллер 258 опорной станции может осуществить это определение путем сравнения конфигурации 268 при осмотре воздушного летательного аппарата 202 с данными 270 о необходимой конфигурации.
[0051] Контроллер 258 опорной станции может быть выполнен с возможностью генерации отчета 272 осмотра. Отчет 272 осмотра может содержать выходные данные, идентифицирующие компонент, если данные для идентификации компонента соответствует компоненту, который не согласован с данными о необходимой конфигурации. Например, конкретная деталь с конкретной меткой 213 радиочастотной идентификации может быть необходима в идентифицированном местоположении, а вместо этого в этом идентифицированном местоположении установлена отличная деталь с соответствующей отличной меткой 213 радиочастотной идентификации в действительности. Таким образом, установленная деталь, соответствующая данным для идентификации компонента, связанного с установленной деталью, может и не быть согласована с данными о необходимой конфигурации необходимой детали.
[0052] Еще в одном примере контроллер 226 беспилотного летательного аппарата (UAV) может передавать на опорную станцию 206 данные, указывающие на то, что в месте расположения метки радиочастотной идентификации не было считано никаких данных для идентификации компонента. В результате это может привести к утрате детали или наличию детали с неправильной меткой радиочастотной идентификации. В данном случае контроллер 258 опорной станции может генерировать выходные данные, идентифицирующие данные о необходимой конфигурации для местоположения метки радиочастотной идентификации. То есть, отчет 272 осмотра может содержать выходные данные, указывающие на то, какую деталь или какой компонент следует установить в соответствующем месте. Контроллер опорной станции может генерировать выходные данные для дисплейного устройства 274 для отображения по меньшей мере части отчета 272 осмотра для выдачи оператору предупредительного сообщения и отображения инструкций оператору для замены установленной детали деталью или компонентом, которые должны быть установлены в соответствующем местоположении.
[0053] Отчет 272 осмотра может содержать выходные данные, указывающие на то, что данные для идентификации компонента для идентифицированного местоположения действительно соответствуют конкретному компоненту, согласованному с данными о необходимой конфигурации для этого идентифицированного местоположения. Отчет осмотра может быть сохранен в запоминающем устройстве 260 для хранения данных опорной станции 206.
[0054] Контроллер 258 опорной станции может доставлять отчет 272 осмотра пользователю через интерфейс 262 ввода-вывода опорной станции 206, например посредством дисплея 274 или принтера 276. Дисплей 274 и/или принтер 276 могут быть размещены в опорной станции 206 или еще в одном местоположении и могут иметь связь с контроллером 258 опорной станции посредством проводной или беспроводной технологии связи. Иллюстративный дисплей примера отчета 272 осмотра показан на ФИГ. 4 и описан ниже.
[0055] Интерфейс 262 ввода-вывода может содержать различные механизмы ввода данных, такие как клавиатура 278 или манипулятор 280 типа «мышь». Эти средства могут обеспечивать возможность отправки пользователем сигналов или команд на опорную станцию 206, беспилотный летательный аппарат 204 (UAV) или базу 264 данных.
[0056] База 264 данных может выполнять некоторые из функций или все функции системы обработки данных, описанной, например, со ссылкой на ФИГ. 5. Несмотря на то, что на ФИГ. 2 опорная станция 206 и база 264 данных показаны в раздельном виде, они могут представлять собой часть объединенного узла опорной станции. База 264 данных может содержать систему 282 связи, сервер 284 и запоминающее устройство 286. Система 282 связи может быть выполнена с возможностью связи с системой 256 связи опорной станции 206 проводным или беспроводным образом напрямую или через сеть. Сервер 284 может быть функционально соединен с системой 282 связи и запоминающим устройством 286.
[0057] Запоминающее устройство 286 базы 264 данных может содержать информацию о воздушном летательном аппарате, обозначенную как 288, 288', 288'' и т.п., специфичную для множества различных воздушных летательных аппаратов, обозначенных как воздушный летательный аппарат А, воздушный летательный аппарат В, воздушный летательный аппарат М и т.д. Например, информация 288 о воздушном летательном аппарате в базе данных, соответствующая воздушному летательному аппарату А, может содержать модельный ряд 290, карту 292 расположения меток радиочастотной идентификации и различные данные 294 о конфигурации. Данные о конфигурации могут содержать первоначальную заводскую конфигурацию 296 воздушного летательного аппарата в том виде, в котором он был первоначально спроектирован и изготовлен. Данные 294 о конфигурации также могут содержать данные 297 о техническом обслуживании, которые могут соответствовать изменениям, которые были реализованы в отношении воздушного летательного аппарата А вслед за первоначальным проектированием, а именно возможно во время цикла технического обеспечения. Может быть дополнительно включена текущая конфигурация 298, которая получена в результате текущего осмотра воздушного летательного аппарата и которая может соответствовать наиболее последним доступным данным о конфигурации установленных компонентов и данным 270 о необходимой конфигурации.
Пример 3:
[0058] В данном примере описан пример совокупности операций, выполняемых при определении информации о воздушном летательном аппарате, как показано на ФИГ. 3. На ФИГ. 3 показано изображение операций, которые в целом обозначены ссылочным номером 300 и которые могут быть выполнены в способе определения информации о воздушном летательном аппарате. Некоторые из этих операций 300 или они все могут быть выполнены опорной станцией системы осмотра воздушного летательного аппарата, такой как опорная станция 104 системы 100 осмотра воздушного летательного аппарата или опорная станция 206 системы 200 осмотра воздушного летательного аппарата. Некоторые из этих операций 300 или они все могут быть выполнены беспилотным летательным аппаратом (UAV) системы осмотра воздушного летательного аппарата, такого как беспилотный летательный аппарат 102 или беспилотный летательный аппарат 204. Некоторые из этих операций 300 или они все могут быть выполнены в совокупности схем первого процессора опорной станции, причем первый процессор может исполнять первую совокупность машиночитаемых программных инструкций. Некоторые из этих операций 300 или они все могут быть выполнены в совокупности схем второго процессора беспилотного летательного аппарата, причем второй процессор может исполнять вторую совокупность машиночитаемых программных инструкций. Операции 300 могут быть выполнены системой осмотра воздушного летательного аппарата в ангаре для воздушного летательного аппарата или другой защитной среде.
[0059] Операции 300 могут быть выполнены компонентами любой из систем осмотра воздушного летательного аппарата, показанных и описанных со ссылкой на ФИГ. 1 и 2. Несмотря на то, что различные этапы операций 300 описаны ниже и показаны на ФИГ. 3, не все из этих этапов обязательно должны быть выполнены, а в некоторых случаях они могут быть выполнены в порядке, отличном от показанного порядка.
[0060] Операции 300 могут начинаться на этапе 302. Отнесение операций 300 к системе 200 осмотра воздушного летательного аппарата, беспилотный летательный аппарат 204 (UAV) и опорная станция 206 могут быть приведены в действие на этапе 302, а система 200 осмотра воздушного летательного аппарата может позиционировать воздушный летательный аппарат 202 рядом с текущим местоположением опорной станции 206 или беспилотного летательного аппарата 204. Система 200 осмотра воздушного летательного аппарата может позиционировать воздушный летательный аппарат 202 путем использования датчиков 236 или камер 232, размещенных на беспилотном летательном аппарате 204, после чего данные датчиков или изображения камер могут быть проанализированы беспилотным летательным аппаратом 204 или опорной станцией 206. Беспилотный летательный аппарат 204 и опорная станция 206 могут иметь беспроводную связь. После приведения в действие беспилотного летательного аппарата 204 и опорной станции 206, система 200 осмотра воздушного летательного аппарата может продолжать работать автономно или автоматически без использования каких-либо данных, вводимых пользователем.
[0061] Операции 300 могут включать этап 304 определения ориентации воздушного летательного аппарата. Этап 304 может быть выполнен первым процессором 258 опорной станции 206 или вторым процессором 240 беспилотного летательного аппарата 204 (UAV) и может зависеть от изображения воздушного летательного аппарата 202. После определения ориентации воздушного летательного аппарата, второй процессор 240 беспилотного летательного аппарата 204 может генерировать навигационные сигналы, подходящие для перемещения беспилотного летательного аппарата 204 вдоль воздушного летательного аппарата 202, и управляющие сигналы, подходящие для управления работой бортовой камеры 232, чувствительной к видимому свету, для записи изображения по меньшей мере части воздушного летательного аппарата 202, содержащего информацию 288 о воздушном летательном аппарате, такую как идентификационные отметки, отображенные рядом с хвостовой частью, фюзеляжем или крылом воздушного летательного аппарата. Беспилотный летательный аппарат 204 может затем передавать сигналы, указывающие на изображение, на опорную станцию 206. Опорная станция 206 может принимать сигналы изображения от беспилотного летательного аппарата 204.
[0062] Операции 300 могут включать этап 306 определения модели воздушного летательного аппарата и/или номера хвостовой части. Этап 306 может быть выполнен первым процессором 258 опорной станции 206 или вторым процессором 240 беспилотного летательного аппарата 204 (UAV). Первый процессор 258 может определять модель и регистрационный номер воздушного летательного аппарата 202 на основании сигналов изображения, принятых от беспилотного летательного аппарата 204.
[0063] Операции 300 могут включать этап 308 извлечения карты 244 расположения меток радиочастотной идентификации воздушного летательного аппарата 202. Карта 244 расположения меток радиочастотной идентификации может быть отправлена базой данных и принята на опорной станции 206. Карта 244 расположения меток радиочастотной идентификации может содержать множество местоположений меток радиочастотной идентификации относительно воздушного летательного аппарата 202. Опорная станция 206 может затем передавать карту 244 расположения меток радиочастотной идентификации воздушного летательного аппарата 202 на беспилотный летательный аппарат 204 (UAV).
[0064] Опорная станция 206 может принимать предварительно определенный маршрут 246 осмотра, подходящий для идентифицированного воздушного летательного аппарата 202. Маршрут 246 осмотра может проходить рядом с местами 244 расположения меток радиочастотной идентификации. Опорная станция 206 может передавать маршрут 246 осмотра на беспилотный летательный аппарат 204 (UAV), который может в дальнейшем автономно двигаться вдоль маршрута 246 осмотра. В качестве альтернативы опорная станция 206 может генерировать и передавать навигационные сигналы на беспилотный летательный аппарат 204 для управления траекторией беспилотного летательного аппарата 204 вдоль маршрута 246 осмотра.
[0065] После определения модельного ряда и регистрационных номеров воздушного летательного аппарата на этапе 306, опорная станция 206 может принимать данные о необходимой конфигурации воздушного летательного аппарата 202. Опорная станция 206 может принимать данные о необходимой конфигурации для каждого местоположения из множества местоположений 244 меток радиочастотной идентификации. Данные о необходимой конфигурации могут быть сохранены в памяти или запоминающем устройстве 260 для хранения данных в опорной станции 206. После завершения осмотра беспилотным летательным аппаратом 204 (UAV) воздушного летательного аппарата 202, данные 270 о необходимой конфигурации могут быть сравнены первым процессором 258 опорной станции 206 с данными 268 о текущей конфигурации при осмотре, определенными беспилотным летательным аппаратом 204.
[0066] Следом за этапом 308, операции 300 могут вводить контур обратной связи, начинающийся с этапа 310 определения того, были ли считаны все из местоположений 244 меток радиочастотной идентификации. То есть второй процессор 258 беспилотного летательного аппарата 204 (UAV) может определять, совершил ли этот беспилотный летательный аппарат 204 перемещение в местоположения, расположенные рядом со всеми местоположениями 244 меток радиочастотной идентификации в сохраненной карте расположения меток радиочастотной идентификации. Если второй процессор определяет, что беспилотный летательный аппарат не был во всех местоположениях 244 меток радиочастотной идентификации, то затем операции 300 могут переходить к этапу 312.
[0067] Операции 300 могут включать этап 312 генерации управляющих сигналов для перемещения в следующее местоположение. В случае, согласно которому беспилотный летательный аппарат 204 (UAV) двигается автономно, этап 312 может быть выполнен вторым процессором 240 беспилотного летательного аппарата 204. В случае, согласно которому беспилотный летательный аппарат 204 управляется опорной станцией 206, этап 312 может быть выполнен первым процессором 258 опорной станции 206. Управляющие сигналы могут представлять собой навигационные сигналы и могут быть сгенерированы по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации и/или принятого маршрута осмотра. Сигналы могут подходить для управления перемещением беспилотного летательного аппарата 204 рядом со следующей меткой 213 радиочастотной идентификации, находящейся на воздушном летательном аппарате 202 в следующем местоположении метки радиочастотной идентификации.
[0068] Операции 300 могут включать этап 314 полета в следующее местоположение. Этап 314 и этап 312 могут быть выполнены по существу одновременно. Таким образом, беспилотный летательный аппарат 204 (UAV) может двигаться последовательно из одного ближнего местоположения метки радиочастотной идентификации в следующее местоположение до тех пор, пока не будут посещены все местоположения 244 меток радиочастотной идентификации.
[0069] Операции 300 могут включать этап 316 считывания метки 213 радиочастотной идентификации. Считывание метки 213 радиочастотной идентификации может быть выполнено беспилотным летательным аппаратом 204 (UAV), в частности считывающим устройством 234 радиочастотной идентификации, находящимся на борту беспилотного летательного аппарата 204, причем сигналы считывающего устройства радиочастотной идентификации интерпретируются вторым процессором 240 беспилотного летательного аппарата 204. Метка 213 радиочастотной идентификации может быть считана беспилотным летательным аппаратом 204 как только она попадает в диапазон считывания метки 213 радиочастотной идентификации по мере продвижения беспилотного летательного аппарата 204 вдоль маршрута 246 осмотра.
[0070] Операции 300 могут включать этап 318 приема сигнала радиочастотной идентификации (RFID). Сигнал радиочастотной идентификации может быть сгенерирован считывающим устройством 234 радиочастотной идентификации на беспилотном летательном аппарате 204 (UAV) в ответ на наличие метки 213 радиочастотной идентификации в определенном для нее месте метки радиочастотной идентификации. Сигнал радиочастотной идентификации может содержать связанные со считыванием данные, которые могут содержать идентифицирующие данные, связанные с воздушным летательным аппаратом. Идентифицирующие данные, связанные с воздушным летательным аппаратом, могут содержать данные, соответствующие модельному ряду воздушного летательного аппарата 202 и/или регистрационному номеру воздушного летательного аппарата 202. Идентифицирующие данные, связанные с воздушным летательным аппаратом, могут представлять собой данные для идентификации компонента, соответствующие индивидуальным признакам компонента, установленного на воздушном летательном аппарате 202 рядом с местом расположения метки радиочастотной идентификации. Сигнал радиочастотной идентификации может содержать связанные со считыванием данные, указывающих на то, что в местоположении метки радиочастотной идентификации не было считано никаких данных для идентификации компонента.
[0071] Сигнал радиочастотной идентификации (RFID) может быть принят вторым процессором 240 беспилотного летательного аппарата 204 (UAV). В некоторых случаях беспилотный летательный аппарат 204 может передавать сигнал радиочастотной идентификации на опорную станцию 206, а опорная станция 206 может принимать сигнал радиочастотной идентификации. Беспилотный летательный аппарат 204 может передавать сигнал радиочастотной идентификации на опорную станцию 206 из местоположения, находящегося рядом с местом расположения метки радиочастотной идентификации. В качестве альтернативы беспилотный летательный аппарат 204 может хранить сигнал радиочастотной идентификации и передавать его на опорную станцию 206 после возвращения этого беспилотного летательного аппарата 204 (UAV) на опорную станцию. В данном случае операции 300 могут возвращаться к этапу 310.
[0072] Операции 300 могут включать этап 320 определения того, было ли зарегистрировано значение радиочастотной идентификации (RFID). Значение радиочастотной идентификации может представлять собой серийный номер или другой идентификационный номер, связанный с деталью, компонентом, узлом или системой воздушного летательного аппарата, или код, который может быть приведен в соответствие с соответствующим компонентом. Значение радиочастотной идентификации может содержать данные, соответствующие самому воздушному летательному аппарату 202, и может содержать данные, соответствующие конкретному компоненту, связанному с меткой 213 радиочастотной идентификации в местоположении метки радиочастотной идентификации. Значение радиочастотной идентификации может содержать связанные со считыванием данные, описанные со ссылкой на этап 318. Этап 320 может быть выполнен вторым процессором 240 беспилотного летательного аппарата 204 (UAV). В качестве альтернативы беспилотный летательный аппарат 204 может передавать сигнал на опорную станцию 206, причем первый процессор 258 опорной станции 206 может выполнять этап 320. В случае, в котором не было зарегистрировано значение радиочастотной идентификации, операции 300 могут переходить к этапу 322. В случае, в котором зарегистрировано значение радиочастотной идентификации, операции 300 могут переходить к этапу 324.
[0073] Операции 300 могут включать этап 322 генерирования выходных данных о том, что метка радиочастотной идентификации отсутствует или является неисправной. Этап 322 может быть выполнен первым процессором 258 опорной станции 206, который может генерировать выходные данные, идентифицирующие данные о необходимой конфигурации для местоположения метки радиочастотной идентификации, когда связанные со считыванием данные указывают на то, что в местоположении метки радиочастотной идентификации не было считано никаких данных для идентификации компонента. Следом за этапом 322 операции 300 могут возвращаться к этапу 310.
[0074] Операции 300 могут содержать этап 324 определения, соответствует ли значение радиочастотной идентификации (RFID) компоненту, согласованному с компонентом, связанным со значением воздушного летательного аппарата 202. Этап 324 может быть выполнен первым процессором 258 опорной станции 206. Определение того, соответствует ли значение радиочастотной идентификации значению воздушного летательного аппарата, может включать определение, согласованы ли данные для идентификации компонента, принятые от беспилотного летательного аппарата 204, с данными о необходимой конфигурации. В некоторых случаях значение радиочастотной идентификации может и не соответствовать значению воздушного летательного аппарата, а операции 300 могут переходить к этапу 326. Например, значение радиочастотной идентификации может и не быть распознано первым процессором 258 опорной станции 206 или значение радиочастотной идентификации может быть распознано, однако оно может соответствовать устаревшей детали.
[0075] Операции 300 могут содержать этап 326 определения, доступно ли обновление для компонента, связанного с меткой 213 радиочастотной идентификации, находящейся в местоположении метки радиочастотной идентификации. Если доступно обновление, то операции 300 могут переходить к этапу 328 генерирования выходных данных об обновлении и возвращаться к этапу 310. Если обновление не доступно, то операции 300 могут переходить к этапу 330 генерации выходного сообщения об ошибке и возвращаться к этапу 310. Этапы 326, 328 и 330 могут быть выполнены первым процессором 258 опорной станции 206.
[0076] Если определено, что значение радиочастотной идентификации (RFID) соответствует компоненту, согласованному с компонентом воздушного летательного аппарата, то операции 300 могут переходить от этапа 324 к этапу 332 извлечения данных об изделии, связанных со значением радиочастотной идентификации. Данные об изделии могут соответствовать данным о необходимой конфигурации воздушного летательного аппарата 202 и могут быть извлечены опорной станцией 206 или первым процессором 258 опорной станции 206.
[0077] Операции 300 могут включать этап 334 определения, соответствует ли значение радиочастотной идентификации (RFID) компоненту, согласованному с необходимым значением компонента для местоположения метки радиочастотной идентификации. Этап 334 может быть выполнен первым процессором 258 опорной станции 206 и может зависеть от связанных со считыванием данных и данных о необходимой конфигурации. В случае, в котором определено, что значение компонента радиочастотной идентификации соответствует значению компонента, согласованному с необходимым значением, операции 300 могут переходить к этапу 336 генерирования выходных данных о том, что метка радиочастотной идентификации соответствует значению компонента, согласованному с необходимым значением, и могут возвращаться к этапу 310.
[0078] В случае, в котором определено, что значение радиочастотной идентификации (RFID) не соответствует значению компонента, согласованному с необходимым значением, то операции 300 могут переходить к этапу 338 генерирования выходных данных, согласно которым деталь или компонент, находящиеся в местоположении метки радиочастотной идентификации, необходимо заменить или установить, и могут возвращаться к этапу 310. То есть, выходные данные могут идентифицировать компонент, соответствующий данным для идентификации компонента, если данные для идентификации компонента не соответствуют компоненту, согласованному с данными о необходимой конфигурации.
[0079] Если на этапе 310, первым процессором 258 опорной станции 206 или вторым процессором 240 беспилотного летательного аппарата 204 (UAV), определяют, что были считаны все местоположения 244 меток радиочастотной идентификации, то затем операции 300 могут переходить к этапу 340 возврата беспилотного летательного аппарата 204 на опорную станцию 206 или соответствующую наземную платформу. Беспилотный летательный аппарат 204 может автономно возвращаться на опорную станцию 206 или в направлении опорной станции 206.
[0080] Операции 300 могут включать этап 342 генерирования окончательного отчета 272 с рекомендациями. Этап 342 может быть выполнен первым процессором 258 опорной станции 206. Окончательный отчет с рекомендациями может зависеть от связанных со считыванием данных от беспилотного летательного аппарата 204 (UAV) и данных о необходимой конфигурации, принятых опорной станцией 206. Окончательный отчет 272 с рекомендациями может идентифицировать, среди всего прочего, какие метки 213 радиочастотной идентификации соответствуют компонентам, согласованным с необходимой конфигурацией воздушного летательного аппарата 202, какие метки радиочастотной идентификации по-видимому отсутствуют или являются неисправными, а какие метки 213 радиочастотной идентификации связаны с компонентом, который необходимо обследовать, заменить, обновить или установить. Окончательный отчет 272 с рекомендациями может быть отправлен пользователю посредством дисплея 274 на вычислительном устройстве, может быть напечатан на принтере 276 или т.п.
[0081] Операции 300 могут заканчиваться на этапе 346, согласно которому выключают беспилотный летательный аппарат 204 (UAV) и опорную станцию 206.
Пример 4:
[0082] В данном примере описан пример выдачи отчета 272 осмотра воздушного летательного аппарата на пользовательский дисплей 274 или принтер 276, как показано на ФИГ. 4.
[0083] На ФИГ. 4 показан пример пользовательского дисплея, который обозначен в целом ссылочным номером 400 и который может содержать выходные данные или отчет 402 о конфигурации воздушного летательного аппарата для пользователя, что иллюстрирует пример результатов осмотра воздушного летательного аппарата. Пользовательский дисплей 400 может быть сгенерирован во время операций 300, описанных со ссылкой на ФИГ. 3, и/или посредством любого из воздушного летательного аппарата системы 100 или 200 осмотра, описанных в настоящем документе.
[0084] Отчет 402 о конфигурации воздушного летательного аппарата может зависеть от осматриваемой конфигурации воздушного летательного аппарата и необходимой конфигурации воздушного летательного аппарата. Осматриваемая конфигурация может быть определена посредством системы 100 или 200 осмотра воздушного летательного аппарата, содержащей беспилотный летательный аппарат 102 или 204 (UAV) и опорную станцию 104 или 206, причем беспилотный летательный аппарат 102 или 204 выполнен с возможностью извлечения связанных со считыванием данных из одной или более меток 120 или 213 радиочастотной идентификации, находящихся в одном или более местоположений 244 меток радиочастотной идентификации на воздушном летательном аппарате 106 или 202. Связанные со считыванием данные могут содержать данные для идентификации компонента, соответствующие индивидуальным признакам компонента, установленного на воздушном летательном аппарате 106 или 202. Данные о необходимой конфигурации могут соответствовать необходимым или запрашиваемым компонентам воздушного летательного аппарата 106 или 202.
[0085] Отчет 402 о конфигурации воздушного летательного аппарата может содержать поле 404 для информации о воздушном летательном аппарате, первый перечень 406 обнаруженных совместимых компонентов или деталей и второй перечень 408 несовместимых компонентов или деталей, которые не реагируют. Поле 404 для информации о воздушном летательном аппарате может содержать модельный ряд 410 воздушного летательного аппарата 106 или 202 и номер 412 хвостовой части для воздушного летательного аппарата 106 или 202. Информация о воздушном летательном аппарате может быть определена беспилотным летательным аппаратом 102 или 204 (UAV) или опорной станцией 104 или 206 системы 100 или 200 осмотра воздушного летательного аппарата или может быть введена пользователем в систему 100 или 200 осмотра воздушного летательного аппарата.
[0086] Первый перечень 406 совместимых компонентов может содержать перечень установленных в настоящее время деталей, компонентов, систем или узлов, в которых установленная деталь, компонент, систему или узел совпадает с необходимой деталью, компонентом, системой или узлом. Для компонентов, перечисленных в первом перечне 406, от пользователя не требуется совершения какого-либо действия. Первый перечень 406 может быть сгенерирован по меньшей мере частично на этапе 336 в операциях 300, описанных в примере 3. Первый перечень 406 может содержать названия компонентов, серийные номера или какие-либо другие средства идентификации конкретных компонентов воздушного летательного аппарата.
[0087] Второй перечень 408 несовместимых компонентов может содержать перечень установленных деталей, компонентов, систем или узлов, в которых установленная деталь, компонент, система или узел не согласованы с необходимой деталью, компонентом, системой или узлом. Установленный компонент может и не быть согласован с необходимым компонентом по множеству различных причин, включая, но без ограничения, следующие: установленный компонент не распознан системой 100 или 200 осмотра воздушного летательного аппарата, установленный компонент распознан, однако известно, что он является устаревшим, установленный компонент не представляет собой подходящий компонент, установленный компонент не находится в необходимом местоположении или метка 120 или 213 радиочастотной идентификации, связанная с компонентом, отсутствует или является неисправной. Второй перечень может содержать названия компонентов, серийные номера или какие-либо другие средства идентификации конкретных компонентов воздушного летательного аппарата. Второй перечень может отображать информацию, связанную с установленным компонентом и/или необходимым компонентом. Например, контроллер 258 опорной станции (или опорная станция 104 системы 100 осмотра воздушного летательного аппарата или опорная станция 206 системы 200 осмотра воздушного летательного аппарата) может генерировать выходные данные для дисплейного устройства 274 для выдачи оператору предупредительного сообщения и для отображения инструкций оператору для замены установленного компонента необходимым компонентом.
[0088] Отчет 402 о конфигурации воздушного летательного аппарата может содержать одну или более рекомендаций 414. Конкретные рекомендации могут зависеть от степени различия между установленным компонентом и необходимым компонентом. Пример рекомендаций включает, но без ограничения, предоставление рекомендации по обследованию, рекомендации по обновлению и рекомендации по установке.
[0089] Отчет 402 о конфигурации воздушного летательного аппарата может быть представлен пользователю на экране или другом дисплее 274 вычислительного устройства, может быть напечатан на принтере 276 или может быть отправлен в виде электронного сообщения на удаленный компьютер, к которому пользователь имеет доступ.
Пример 5:
[0090] В данном примере описана иллюстративная система обработки данных, показанная на ФИГ. 5.
[0091] Как показано на ФИГ. 5, этот пример представляет собой систему 500 обработки данных в соответствии с аспектом настоящего изобретения. В этом примере система 500 обработки данных представляет собой иллюстративную систему обработки данных, подходящую для реализации аспектов системы 100 или 200 осмотра воздушного летательного аппарата и/или соответствующих способов и компьютерных программных продуктов. В частности, в некоторых примерах устройства, которые представляют собой варианты реализации систем обработки данных (например, смартфоны, планшеты, персональный компьютер), могут содержать беспилотный летательный аппарат 102 или 204, опорную станцию 104 или 206 и базу 264 данных.
[0092] В этом иллюстративном примере система 500 обработки данных содержит инфраструктуру 502 связи. Инфраструктура 502 связи обеспечивает связь между процессорным блоком 504, памятью 506, хранилищем 508 для длительного хранения данных, блоком 510 связи, блоком 512 ввода-вывода и дисплеем 514. Память 506, хранилище 508 для длительного хранения данных, блок 510 связи, блок 512 ввода-вывода и дисплей 514 представляют собой примеры ресурсов, доступных процессорному блоку 504 посредством инфраструктуры 502 связи.
[0093] Процессорный блок 504 служит для запуска инструкций, которые могут быть загружены в память 506. Процессорный блок 504 может представлять собой несколько процессоров, многопроцессорное ядро или процессор некоторого другого типа в зависимости от конкретной реализации. Кроме того, процессорный блок 504 может быть реализован с использованием некоторого количества гетерогенных процессорных систем, в которых основной процессор представлен вторичными процессорами на одном кристалле. Еще в одном иллюстративном примере процессорный блок 504 может представлять собой симметричную многопроцессорную систему, содержащую множество процессоров одного и того же типа.
[0094] Память 506 и хранилище 508 для длительного хранения данных представляют собой примеры запоминающих устройств 516. Запоминающее устройство представляет собой любую часть аппаратных средств, которая выполнена с возможностью хранения информации, такой как, например, без ограничения, данные, программный код в функциональном виде и любой другой подходящей информации на временной основе или на постоянной основе.
[0095] В этих примерах запоминающие устройства 516 также могут называться машиночитаемыми запоминающими устройствами. В этих примерах память 506 может представлять собой, например, оперативное запоминающее устройство или любое другое подходящее запоминающее устройство для кратковременного или длительного хранения данных. Хранилище 508 для длительного хранения данных имеет различные формы в зависимости от конкретной реализации.
[0096] Например, хранилище 508 для длительного хранения данных может содержать один или более компонентов или одно или более устройств. Например, хранилище 508 для длительного хранения данных может представлять собой жесткий диск, флеш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или их некоторую другую комбинацию. Носители, используемые хранилищем 508 для длительного хранения данных, также могут быть съемными. Например, съемный накопитель на жестких дисках может быть использован для хранилища 508 для длительного хранения данных.
[0097] В этих примерах блок 510 связи обеспечивает связь с другими системами обработки данных или устройствами. В этих примерах блок 510 связи представляет собой плату сетевого интерфейса. Блок 510 связи может обеспечивать связь путем использования физической линии связи и/или линии беспроводной связи.
[0098] Блок 512 ввода-вывода обеспечивает возможность ввода данных и их выдачу с использованием других устройств, которые могут быть соединены с системой 500 обработки данных. Например, блок 512 ввода-вывода может обеспечивать соединение для использования входных данных через клавиатуру, манипулятор типа «мышь» и/или некоторое другое подходящее устройство ввода. Кроме того, блок 512 ввода-вывода может отправить выходные данные на принтер. Дисплей 514 обеспечивает механизм для отображения информации пользователю.
[0099] Инструкции для операционной системы, приложения и/или программы могут быть размещены в запоминающих устройствах 516, которые имеют связь с процессорным блоком 504 через инфраструктуру 502 связи. В этих иллюстративных примерах инструкции находятся в функциональной форме в хранилище 508 для длительного хранения данных. Эти инструкции могут быть загружены в память 506 для исполнения процессорным блоком 504. Процессы различных вариантов реализации могут быть выполнены процессорным блоком 504 с использованием реализуемых с помощью компьютера инструкций, которые могут быть загружены в память, такую как память 506.
[00100] Эти инструкции называют программными инструкциями, программным кодом, используемым компьютером программным кодом или машиночитаемым программным кодом, который может быть считан и исполнен процессором в процессорном блоке 504. В различных вариантах реализации программный код может быть реализован на различных физических или машиночитаемых носителях данных, таких как память 506 или хранилище 508 для длительного хранения данных.
[00101] Программный код 518 расположен в функциональном виде на машиночитаемых носителях 520, которые могут быть выборочно удалены и которые могут быть загружены в систему 500 обработки данных или переданы на нее для исполнения процессорным блоком 504. В этих примерах программный код 518 и машиночитаемые носители 520 образует компьютерный программный продукт 522. В одном из примеров машиночитаемые носители 520 могут представлять собой машиночитаемые носители 524 для хранения данных или машиночитаемые носители 526 для передачи сигналов.
[00102] Машиночитаемые носители 524 для хранения данных могут содержать, например, оптический или магнитный диск, который вставляют в дисковод или другое устройство или размещают в дисководе или другом устройстве, которое представляет собой часть хранилища 508 для длительного хранения данных, для передачи данных в запоминающее устройство, такое как накопитель на жестких дисках, который представляет собой часть хранилища 508 для длительного хранения данных. Машиночитаемые носители 524 для хранения данных также могут быть выполнены в виде хранилища для длительного хранения данных, такого как накопитель на жестких дисках, флешка или флеш-память, которая соединена с системой 500 обработки данных. В некоторых случаях машиночитаемые носители 524 для хранения данных могут и не быть выполнены с возможностью их удаления из системы 500 обработки данных.
[00103] В этих примерах машиночитаемые носители 524 для хранения данных представляет собой физическое или материальное запоминающее устройство, используемое для хранения программного кода 518, а не носитель, который распространяет или передает программный код 518. Машиночитаемые носители 524 данных также называются машиночитаемым материальным запоминающим устройством или машиночитаемым физическим запоминающим устройством. Другими словами, машиночитаемые носители 524 для хранения данных предназначены для длительного хранения данных.
[00104] В качестве альтернативы программный код 518 может быт передан на систему 500 обработки данных с использованием машиночитаемых носителей 526 для передачи сигналов. Машиночитаемые носители 526 для передачи сигналов могут представлять собой, например, распространяемый сигнал данных, содержащий программный код 518. Например, машиночитаемые носители 526 для передачи сигналов могут представлять собой электромагнитный сигнал, оптический сигнал и/или сигнал любого другого подходящего типа. Эти сигналы может быть переданы по линиям связи, таким как линии беспроводной связи, оптоволоконный кабель, коаксиальный кабель, провод и/или линия связи любого другого подходящего типа. Другими словами, в иллюстративных примерах линия связи и/или соединение могут быть физическими или беспроводными.
[00105] В некоторых иллюстративных вариантах реализации программный код 518 может быть загружен по сети в хранилище 508 для длительного хранения данных из другого устройства или другой системы обработки данных через машиночитаемые носители 526 для передачи сигналов для использования в системе 500 обработки данных. Например, программный код, хранящийся в машиночитаемом носителе данных в серверной системе обработки данных, может быть загружен по сети из сервера в систему 500 обработки данных. Система обработки данных, выдающая программный код 518, может представлять собой серверный компьютер, клиентский компьютер или некоторое другое устройство, выполненное с возможностью хранения и передачи программного кода 518.
[00106] Различные компоненты, показанные для системы 500 обработки данных, не означают введение архитектурных ограничений способом, которым могут быть осуществлены различные варианты реализации. Различные иллюстративные варианты реализации могут быть реализованы в системе обработки данных, содержащей компоненты в дополнение к компонентам, показанным для системы 500 обработки данных, и/или вместо них. Другие компоненты, показанные на ФИГ. YY, могут быть отличаться от показанных иллюстративных примеров. Различные варианты реализации могут быть реализованы с использованием любого аппаратного устройства или системы, выполненной с возможностью запуска программного кода. В одном из примеров система 500 обработки данных может содержать органические компоненты, выполненные за одно целое с неорганическими компонентами, и/или может быть образована полностью из органических компонентов, за исключением человека. Например, запоминающее устройство может быть образовано из органического полупроводника.
[00107] Еще в одном иллюстративном примере процессорный блок 504 может быть выполнен в виде аппаратного блока, который содержит схемы, которые изготовлены или выполнены для конкретного использования. Аппаратные средства этого типа могут выполнять операции без необходимости в загрузке программного кода в память из запоминающего устройства с тем, чтобы его настроить на выполнение операций.
[00108] Например, когда процессорный блок 504 выполнен в виде аппаратного блока, этот процессорный блок 504 может представлять собой систему схем, интегральную схему специального назначения (ASIC), программируемое логическое устройство или аппаратные средства некоторого другого подходящего типа, выполненные с возможностью исполнения некоторого количества операций. При использовании программируемого логического устройства, оно выполнено с возможностью выполнения определенного количества операций. Устройство может быть перенастроено позднее или может быть постоянно настроено на выполнение определенного количества операций. Примеры программируемых логических устройств содержат, например, программируемую логическую матрицу, логическую матрицу с эксплуатационным программированием, вентильную матрицу с эксплуатационным программированием и другие подходящие аппаратные устройства. При использовании данного типа реализации, программный код 518 может быть опущен, поскольку процессы для различных вариантов реализации реализованы в аппаратном блоке.
[00109] Еще в одном иллюстративном примере процессорный блок 504 может быть реализован с использованием комбинации процессоров, реализованных в компьютерах и аппаратных блоках. Процессорный блок 504 может иметь несколько аппаратных блоков и несколько процессоров, которые выполнены с возможностью запуска программного кода 518. С использованием данного показанного примера некоторые из процессов могут быть реализованы в определенном количестве аппаратных блоков, а другие процессы могут быть реализованы в определенном количестве процессоров.
[00110] Еще в одном примере системная шина может быть использована для реализации инфраструктуры 502 связи, а также может быть образована из одной или более шин, таких как системная шина или шина ввода-вывода. Безусловно, системная шина может быть реализована с использованием архитектуры любого подходящего типа, которая обеспечивает передачу данных между различными компонентами или устройствами, прикрепленными к системной шине.
[00111] Кроме того, блок 510 связи может содержать несколько устройств, которые передают данные и/или принимают данные. Блок 510 связи может представлять собой, например, модем или сетевой адаптер, два сетевых адаптера или их некоторую комбинацию. Кроме того, память может представлять собой, например, память 506 или кэш-память, такую как память, размещенную в интерфейсе и узле контроллеров памяти, которые могут быть представлены в инфраструктуре 502 связи.
[00112] На блок-схемах и структурных схемах, описанных в настоящем документе, показана архитектура, функциональные возможности и работа возможных реализаций систем, способов и компьютерных программных продуктов согласно различным иллюстративным вариантам реализации. Таким образом, каждый блок в блок-схемах или структурных схемах может представлять модуль, сегмент или часть кода, который содержит одну или более исполняемых инструкций для реализации конкретной логической функции или конкретных логических функций. Кроме того, следует отметить, что в некоторых альтернативных реализациях функции, указанные в блоке, могут исполняться в порядке, отличном от порядка, показанного на чертежах. Например, функции двух блоков, показанных последовательно, могут быть исполнены по существу одновременно, или функции этих блоков могут иногда исполняться в обратном порядке в зависимости от предусмотренных функциональных возможностей.
Пример 6:
[00113] В этом разделе описаны дополнительные аспекты и признаки вариантов реализации, представленные, без ограничения, в виде совокупностей параграфов, некоторые из которых или они все могут быть обозначены алфавитно-цифровыми символами для целей ясности и эффективности. Каждый из этих параграфов может быть объединен любым подходящим образом с одним или более других параграфов и/или описанием изобретения, приведенным в тексте настоящего документа. Некоторые из приведенных ниже параграфов специально ссылаются на другие параграфы и дополнительно ограничивают другие параграфы, что обеспечивает, без ограничения, примеры некоторых из подходящих комбинаций.
А1. Система осмотра воздушного летательного аппарата для определения информации о воздушном летательном аппарате, содержащая:
- беспилотный летательный аппарат (UAV), имеющий считывающее устройство радиочастотной идентификации (RFID), контроллер и приемопередатчик, причем
считывающее устройство выполнено с возможностью считывания метки радиочастотной идентификации, находящейся на воздушном летательном аппарате в идентифицированном месте и имеющей идентифицирующие данные, связанные с воздушным летательным аппаратом,
контроллер беспилотного летательного аппарата выполнен с возможностью приема карты расположения меток радиочастотной идентификации воздушного летательного аппарата и с возможностью генерации навигационных сигналов по меньшей мере частично на основании карты расположения меток радиочастотной идентификации для перемещения рядом с идентифицированным местом, а
приемопередатчик беспилотного летательного аппарата выполнен с возможностью связи с контроллером беспилотного летательного аппарата и с возможностью беспроводных приема и передачи данных, и
- опорную станцию, содержащую систему связи, контроллер, функционально соединенный с системой связи, и запоминающее устройство для хранения данных, функционально соединенное с контроллером опорной станции, причем
система связи выполнена с возможностью беспроводной связи с беспилотным летательным аппаратом, а
контроллер опорной станции выполнен
с возможностью приема карты расположения меток радиочастотной идентификации воздушного летательного аппарата и возможностью передачи указанной карты на беспилотный летательный аппарат,
возможностью приема от беспилотного летательного аппарата связанных со считыванием данных, содержащих идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в определенном для нее месте и
с возможностью определения информации о воздушном летательном аппарате на основании связанных со считыванием данных.
А2. Система осмотра согласно параграфу А1, в которой идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате,
причем контроллер опорной станции дополнительно выполнен с возможностью приема данных о необходимой конфигурации воздушного летательного аппарата и с возможностью определения, соответствуют ли данные для идентификации компонента, принятые от беспилотного летательного аппарата (UAV), компоненту, согласованному с данными о необходимой конфигурации.
A3. Система осмотра согласно параграфу А2, в которой контроллер опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
А4. Система осмотра согласно параграфу А2, в которой
контроллер беспилотного летательного аппарата выполнен с возможностью передачи на опорную станцию связанных со считыванием данных, указывающих на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента, когда в месте, определенном для метки радиочастотной идентификации, считывающим устройством радиочастотной идентификации не было принято никаких данных для идентификации компонента, а
контроллер опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации.
А5. Система осмотра согласно параграфу А1, в которой карта расположения меток радиочастотной идентификации содержит множество местоположений меток радиочастотной идентификации,
причем контроллер беспилотного летательного аппарата дополнительно выполнен возможностью генерации навигационных сигналов по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата последовательно в указанное множество местоположений меток радиочастотной идентификации, и с возможностью передачи связанных со считыванием данных на опорную станцию для каждого из мест расположений меток радиочастотной идентификации, в которые было осуществлено перемещение беспилотного летательного аппарата.
А6. Система осмотра согласно параграфу А5, в которой контроллер опорной станции дополнительно выполнен
с возможностью приема данных о необходимой конфигурации для каждого местоположения метки радиочастотной идентификации на воздушном летательном аппарате,
возможностью определения, согласованы ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата, с данными о необходимой конфигурации и
с возможностью генерации выходных данных, идентифицирующих компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, которые соответствуют компоненту, который не согласован с данными о необходимой конфигурации.
А7. Система осмотра согласно параграфу А6, в которой
контроллер беспилотного летательного аппарата (UAV) выполнен с возможностью передачи на опорную станцию связанных со считыванием данных, указывающих на то, что в одном из указанного множества местоположений меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, когда в указанном одном местоположении метки радиочастотной идентификации считывающим устройством радиочастотной идентификации не было принято никаких данных для идентификации компонента, а
контроллер опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
А8. Система осмотра согласно параграфу А1, в которой
беспилотный летательный аппарат дополнительно содержит чувствительную к видимому свету камеру, а
контроллер беспилотного летательного аппарата выполнен
с возможностью перемещения вдоль воздушного летательного аппарата,
возможностью управления камерой для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации воздушного летательного аппарата, и
с возможностью передачи сигналов изображения, указывающих на изображение, на опорную станцию, а контроллер опорной станции выполнен с возможностью идентификации модели и регистрационного номера воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата.
А9. Система осмотра согласно параграфу А1, в которой идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации модельного ряда, связанные с модельным рядом воздушного летательного аппарата,
причем контроллер опорной станции дополнительно выполнен с возможностью определения модельного ряда воздушного летательного аппарата на основании данных для идентификации модельного ряда.
В1. Способ определения информации о воздушном летательном аппарате, согласно которому:
принимают на опорной станции карту расположения меток радиочастотной идентификации воздушного летательного аппарата,
передают карту расположения меток радиочастотной идентификации воздушного летательного аппарата на беспилотный летательный аппарат,
генерируют, посредством беспилотного летательного аппарата, навигационные сигналы по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в определенном для нее месте, причем метка радиочастотной идентификации имеет идентифицирующие данные, связанные с воздушным летательным аппаратом,
принимают, посредством опорной станции, от беспилотного летательного аппарата связанные со считыванием данные, содержащие идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в указанном местоположении, и
определяют на опорной станции информацию о воздушном летательном аппарате на основании связанных со считыванием данных.
В2. Способ согласно параграфу В1, согласно которому идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате,
причем согласно указанному способу дополнительно принимают, посредством опорной станции, данные о необходимой конфигурации воздушного летательного аппарата и определяют, посредством опорной станции, содержат ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата, данные для идентификации компонента, которые соответствуют компоненту, согласованному с данными о необходимой конфигурации.
B3. Способ согласно параграфу В2, согласно которому дополнительно генерируют, посредством опорной станции, выходные данные, идентифицирующие компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
B4. Способ согласно параграфу В2, согласно которому прием связанных со считыванием данных включает прием связанных со считыванием данных, указывающих на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента,
причем согласно указанному способу дополнительно генерируют, посредством опорной станции, выходные данные, идентифицирующие данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации, когда связанные со считыванием данные указывают на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента.
B5. Способ согласно параграфу В1, согласно которому карта расположения меток радиочастотной идентификации содержит множество местоположений меток радиочастотной идентификации,
причем генерирование навигационных сигналов включает генерирование навигационных сигналов по меньшей мере частично на основании сохраненной карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата последовательно в указанное множество местоположений меток радиочастотной идентификации, а
прием связанных со считыванием данных включает прием связанных со считыванием данных от беспилотного летательного аппарата для каждого местоположения из указанного множества местоположений меток радиочастотной идентификации.
B6. Способ согласно параграфу В5, согласно которому дополнительно
принимают данные о необходимой конфигурации для каждого местоположения из указанного множества местоположений меток радиочастотной идентификации,
определяют, содержат ли связанные со считыванием данные, принятые от беспилотного летательного аппарата, данные для идентификации компонента, соответствующие компоненту, согласованному с данными о необходимой конфигурации, и
генерируют выходные данные, идентифицирующие компонент, которому соответствуют данные для идентификации компонента, если данные для идентификации компонента не согласованы с данными о необходимой конфигурации.
B7. Способ согласно параграфу В6, согласно которому
прием связанных со считыванием данных включает прием связанных со считыванием данных, указывающих на то, что в одном из указанного множества местоположений меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, а
генерирование выходных данных включает генерирование выходных данных, идентифицирующих данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
B8. Способ согласно параграфу В1, согласно которому беспилотный летательный аппарат дополнительно содержит чувствительную к видимому свету камеру,
причем генерирование навигационных сигналов включает генерирование навигационных сигналов, подходящих для перемещения беспилотного летательного аппарата вдоль воздушного летательного аппарата, и управляющих сигналов, подходящих для управления работой камеры для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата,
причем согласно указанному способу дополнительно принимают, посредством опорной станции, от беспилотного летательного аппарата сигналы изображения, указывающие на изображение по меньшей мере части воздушного летательного аппарата, и определяют модель и регистрационный номер воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата.
В9. Способ согласно параграфу В1, согласно которому идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации модельного ряда, указывающие на модельный ряд воздушного летательного аппарата,
причем определение информации о воздушном летательном аппарате включает определение модельного ряда воздушного летательного аппарата на основании данных для идентификации модельного ряда, принятых от беспилотного летательного аппарата.
С1. Компьютерный программный продукт, содержащий:
первый машиночитаемый носитель для хранения данных, содержащий первую совокупность встроенных в него машиночитаемых программных инструкций, и второй машиночитаемый носитель для хранения данных, содержащий вторую совокупность встроенных в него машиночитаемых программных инструкций, причем первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором опорной станции, настраивает опорную станцию:
принимать карту расположения меток радиочастотной идентификации воздушного летательного аппарата,
передавать карту расположения меток радиочастотной идентификации воздушного летательного аппарата на беспилотный летательный аппарат,
принимать от беспилотного летательного аппарата связанные со считыванием данные, содержащие идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации находится в определенном для нее месте, и
определять информацию о воздушном летательном аппарате на основании связанных со считыванием данных,
причем вторая совокупность машиночитаемых программных инструкций, при их исполнении вторым процессором беспилотного летательного аппарата, настраивает беспилотный летательный аппарат:
принимать карту расположения меток радиочастотной идентификации от опорной станции и
генерировать навигационные сигналы по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в определенном для нее месте, причем метка радиочастотной идентификации имеет идентифицирующие данные, связанные с воздушным летательным аппаратом.
С2. Компьютерный программный продукт согласно параграфу С1, в котором идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате,
причем первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает опорную станцию принимать данные о необходимой конфигурации воздушного летательного аппарата и определять, содержат ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата, данные для идентификации компонента, которые соответствуют компоненту, согласованному с данными о необходимой конфигурации.
С3. Компьютерный программный продукт согласно параграфу С2, в котором первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает опорную станцию генерировать выходные данные, идентифицирующие компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
С4. Компьютерный программный продукт согласно параграфу С2, в котором первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает опорную станцию:
принимать связанные со считыванием данные, указывающие на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента, и
генерировать выходные данные, идентифицирующие данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации, когда связанные со считыванием данные указывают на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента.
С5. Компьютерный программный продукт согласно параграфу С1, в котором карта расположения меток радиочастотной идентификации содержит множество местоположений меток радиочастотной идентификации,
причем вторая совокупность машиночитаемых программных инструкций, при их исполнении вторым процессором, дополнительно настраивает второй процессор генерировать навигационные сигналы по меньшей мере частично на основании сохраненной карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата последовательно в указанное множество местоположений меток радиочастотной идентификации, а
первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает опорную станцию принимать связанные со считыванием данные от беспилотного летательного аппарата для каждого местоположения из указанного множества местоположений меток радиочастотной идентификации.
С6. Компьютерный программный продукт согласно параграфу С5, в котором первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает опорную станцию:
принимать данные о необходимой конфигурации для каждого местоположения из указанного множества местоположений меток радиочастотной идентификации и
определять, содержат ли связанные со считыванием данные, принятые от беспилотного летательного аппарата, данные для идентификации компонента, соответствующие компоненту, согласованному с данными о необходимой конфигурации, а также
генерировать выходные данные, идентифицирующие компонент, которому соответствуют данные для идентификации компонента, если данные для идентификации компонента не согласованы с данными о необходимой конфигурации.
С7. Компьютерный программный продукт согласно параграфу С6, в котором первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно
настраивает опорную станцию принимать связанные со считыванием данные, указывающие на то, что в одном из указанного множества местоположений меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, и
генерирует выходные данные, идентифицирующие данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
С8. Компьютерный программный продукт согласно параграфу С1, в котором беспилотный летательный аппарат дополнительно содержит чувствительную к видимому свету камеру,
причем вторая совокупность машиночитаемых программных инструкций, при их исполнении вторым процессором, дополнительно настраивает второй процессор генерировать навигационные сигналы, подходящие для перемещения беспилотного летательного аппарата вдоль воздушного летательного аппарата, и управляющих сигналов, подходящих для управления работой камеры для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата, а
первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает первый процессор принимать от беспилотного летательного аппарата сигналы изображения, указывающие на изображение по меньшей мере части воздушного летательного аппарата, и определять модель и регистрационный номер воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата.
С9. Компьютерный программный продукт согласно параграфу С1, в котором идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации модельного ряда, указывающие на модельный ряд воздушного летательного аппарата,
причем первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает первый процессор определять модельный ряд воздушного летательного аппарата на основании данных для идентификации модельного ряда, принятых от беспилотного летательного аппарата.
Преимущества, признаки, результаты
Различные варианты реализации системы осмотра воздушного летательного аппарата, а также соответствующих способов и компьютерных программных продуктов, описанных в настоящем документе, обеспечивают различные преимущества над известными решениями для определения заводской конфигурации воздушного летательного аппарата. Например, иллюстративные варианты реализации, описанные в настоящем документе, обеспечивают возможность автоматизированного осмотра установленных компонентов воздушного летательного аппарата. Кроме того, среди прочих преимуществ, иллюстративные варианты реализации, описанные в настоящем документе, обеспечивают возможность автоматизированного осмотра воздушного летательного аппарата, который необходимо осуществлять без снятия каких-либо деталей этого воздушного летательного аппарата. Ни одна из известных систем или ни одно из известных устройств не могут выполнить эти функции, в частности эффективным образом с низкой вероятностью ошибки. Однако, не все варианты реализации, описанные в настоящем документе, обеспечивают те же самые преимущества или тот же самый уровень преимущества.
Кроме того, настоящее изобретение имеет варианты реализации согласно следующим пунктам:
Пункт 1. Система осмотра воздушного летательного аппарата для определения информации о воздушном летательном аппарате, содержащая:
- беспилотный летательный аппарат (UAV), имеющий считывающее устройство радиочастотной идентификации, контроллер и приемопередатчик, причем
считывающее устройство выполнено с возможностью считывания метки радиочастотной идентификации, находящейся на воздушном летательном аппарате в идентифицированном месте и имеющей идентифицирующие данные, связанные с воздушным летательным аппаратом,
контроллер беспилотного летательного аппарата выполнен с возможностью приема карты расположения меток радиочастотной идентификации воздушного летательного аппарата и с возможностью генерации навигационных сигналов по меньшей мере частично на основании карты расположения меток радиочастотной идентификации для перемещения рядом с идентифицированным местом, а
приемопередатчик беспилотного летательного аппарата выполнен с возможностью связи с контроллером беспилотного летательного аппарата и с возможностью беспроводных приема и передачи данных, и
- опорную станцию, содержащую систему связи, контроллер, функционально соединенный с системой связи, и запоминающее устройство для хранения данных, функционально соединенное с контроллером опорной станции, причем
система связи выполнена с возможностью беспроводной связи с беспилотным летательным аппаратом, а
контроллер опорной станции выполнен
с возможностью приема карты расположения меток радиочастотной идентификации воздушного летательного аппарата, возможностью передачи указанной карты на беспилотный летательный аппарат,
с возможностью приема от беспилотного летательного аппарата связанных со считыванием данных, содержащих идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в определенном для нее месте, и
с возможностью определения информации о воздушном летательном аппарате на основании связанных со считыванием данных.
Пункт 2. Система осмотра по пункту 1, в которой идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате,
причем контроллер опорной станции дополнительно выполнен с возможностью приема данных о необходимой конфигурации воздушного летательного аппарата и с возможностью определения, соответствуют ли данные для идентификации компонента, принятые от беспилотного летательного аппарата, компоненту, согласованному с данными о необходимой конфигурации.
Пункт 3. Система осмотра по пункту 2, в которой контроллер опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
Пункт 4. Система осмотра по пункту 2, в которой
контроллер беспилотного летательного аппарата выполнен с возможностью передачи на опорную станцию связанных со считыванием данных, указывающих на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента, когда в месте, определенном для метки радиочастотной идентификации, считывающим устройством радиочастотной идентификации не было принято никаких данных для идентификации компонента, а
контроллер опорной станции дополнительно выполнено с возможностью генерации выходных данных, идентифицирующих данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации.
Пункт 5. Система осмотра по пункту 1, в которой карта расположения меток радиочастотной идентификации содержит множество местоположений меток радиочастотной идентификации,
причем контроллер беспилотного летательного аппарата дополнительно выполнен с возможностью генерации навигационных сигналов по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата последовательно в указанное множество местоположений меток радиочастотной идентификации, и с возможностью передачи связанных со считыванием данных на опорную станцию для каждого из мест расположения меток радиочастотной идентификации, в которые было осуществлено перемещение беспилотного летательного аппарата.
Пункт 6. Система осмотра по пункту 5, в которой контроллер опорной станции дополнительно выполнен:
с возможностью приема данных о необходимой конфигурации для каждого местоположения метки радиочастотной идентификации на воздушном летательном аппарате,
с возможностью определения, соответствуют ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата, компоненту, согласованному с данными о необходимой конфигурации, и
с возможностью генерации выходных данных, идентифицирующих компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, которые соответствуют компоненту, который не согласован с данными о необходимой конфигурации.
Пункт 7. Система осмотра по пункту 6, в которой
контроллер беспилотного летательного аппарата выполнен с возможностью передачи на опорную станцию связанных со считыванием данных, указывающих на то, что в одном из указанного множества местоположений меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, когда в указанном одном местоположении метки радиочастотной идентификации считывающим устройством радиочастотной идентификации не было принято никаких данных для идентификации компонента, а
контроллер опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
Пункт 8. Система осмотра по пункту 1, в которой беспилотный летательный аппарат дополнительно содержит чувствительную к видимому свету камеру, а контроллер беспилотного летательного аппарата выполнен с возможностью перемещения вдоль воздушного летательного аппарата, возможностью управления камерой для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата, и с возможностью передачи сигналов изображения, указывающих на изображение, на опорную станцию, а контроллер опорной станции выполнен с возможностью идентификации модели и регистрационного номера воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата.
Пункт 9. Способ определения информации о воздушном летательном аппарате, согласно которому:
принимают на опорной станции карту расположения меток радиочастотной идентификации воздушного летательного аппарата,
передают карту расположения меток радиочастотной идентификации воздушного летательного аппарата на беспилотный летательный аппарат,
генерируют, посредством беспилотного летательного аппарата, навигационные сигналы по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в определенном для нее месте, причем метка радиочастотной идентификации имеет идентифицирующие данные, связанные с воздушным летательным аппаратом,
принимают, посредством опорной станции, от беспилотного летательного аппарата связанные со считыванием данные, содержащие идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации находится в определенном для нее месте, и
определяют на опорной станции информацию о воздушном летательном аппарате на основании связанных со считыванием данных.
Пункт 10. Способ по пункту 9, согласно которому идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате, причем согласно указанному способу дополнительно принимают, посредством опорной станции, данных о необходимой конфигурации воздушного летательного аппарата, и определяют, посредством опорной станции, содержат ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата, данные для идентификации компонента, которые соответствуют компоненту, согласованному с данными о необходимой конфигурации.
Пункт 11. Способ по пункту 10, согласно которому дополнительно генерируют, посредством опорной станции, выходные данные, идентифицирующие компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
Пункт 12. Способ по пункту 10, согласно которому прием связанных со считыванием данных включает прием связанных со считыванием данных, указывающих на то, что в указанном местоположении метки радиочастотной идентификации не было считано никаких данных для идентификации компонента, причем согласно указанному способу дополнительно генерируют, посредством опорной станции, выходные данные, идентифицирующие данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации, когда связанные со считыванием данные указывают на то, что в указанном местоположении метки радиочастотной идентификации не было считано никаких данных для идентификации компонента.
Пункт 13. Способ по пункту 9, согласно которому карта расположения меток радиочастотной идентификации содержит множество местоположений меток радиочастотной идентификации, причем генерирование навигационных сигналов включает генерирование навигационных сигналов по меньшей мере частично на основании сохраненной карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата последовательно в указанное множество местоположений меток радиочастотной идентификации, а прием связанных со считыванием данных включает прием связанных со считыванием данных от беспилотного летательного аппарата для каждого местоположения из указанного множества местоположений меток радиочастотной идентификации.
Пункт 14. Способ по пункту 13, согласно которому дополнительно принимают данные о необходимой конфигурации для каждого местоположения из указанного множества местоположений меток радиочастотной идентификации, определяют, содержат ли связанные со считыванием данные, принятые от беспилотного летательного аппарата, данные для идентификации компонента, соответствующие компоненту, согласованному с данными о необходимой конфигурации, и генерируют выходные данные, идентифицирующие компонент, которому соответствуют данные для идентификации компонента, если данные для идентификации компонента не согласованы с данными о необходимой конфигурации.
Пункт 15. Способ по пункту 14, согласно которому
прием связанных со считыванием данных включает прием связанных со считыванием данных, указывающих на то, что в одном из указанного множества местоположений меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, а
генерирование выходных данных включает генерирование выходных данных, идентифицирующих данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
Пункт 16. Способ по пункту 9, согласно которому беспилотный летательный аппарат дополнительно содержит чувствительную к видимому свету камеру,
причем генерирование навигационных сигналов включает генерирование навигационных сигналов, подходящих для перемещения беспилотного летательного аппарата вдоль воздушного летательного аппарата, и управляющих сигналов, подходящих для управления работой камеры для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата,
причем согласно указанному способу дополнительно принимают, посредством опорной станции, от беспилотного летательного аппарата сигналы изображения, указывающие на изображение по меньшей мере части воздушного летательного аппарата, и определяют модель и регистрационный номер воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата.
Пункт 17. Способ по пункту 9, согласно которому идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации модельного ряда, указывающие на модельный ряд воздушного летательного аппарата,
причем определение информации о воздушном летательном аппарате включает определение модельного ряда воздушного летательного аппарата на основании данных для идентификации модельного ряда, принятых от беспилотного летательного аппарата.
Пункт 18. Компьютерный программный продукт, содержащий:
первый машиночитаемый носитель для хранения данных, содержащий первую совокупность встроенных в него машиночитаемых программных инструкций, и второй машиночитаемый носитель для хранения данных, содержащий вторую совокупность встроенных в него машиночитаемых программных инструкций, причем первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором опорной станции, настраивает опорную станцию:
принимать карту расположения меток радиочастотной идентификации воздушного летательного аппарата,
передавать карту расположения меток радиочастотной идентификации воздушного летательного аппарата на беспилотный летательный аппарат,
принимать от беспилотного летательного аппарата связанные со считыванием данные, содержащие идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки радиочастотной идентификации в определенном для нее месте, и
определять информации о воздушном летательном аппарате на основании связанных со считыванием данных,
причем вторая совокупность машиночитаемых программных инструкций, при их исполнении вторым процессором беспилотного летательного аппарата, настраивает беспилотный летательный аппарат:
принимать карту расположения меток радиочастотной идентификации от опорной станции и
генерировать навигационные сигналы по меньшей мере частично на основании принятой карты расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в определенном для нее месте, причем метка радиочастотной идентификации имеет идентифицирующие данные, связанные с воздушным летательным аппаратом.
Пункт 19. Компьютерный программный продукт по пункту 18, в котором идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате,
причем первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает опорную станцию принимать данные о необходимой конфигурации воздушного летательного аппарата и определять, соответствуют ли данные для идентификации компонента, принятые от беспилотного летательного аппарата, компоненту, согласованному с данными о необходимой конфигурации.
Пункт 20. Компьютерный программный продукт по пункту 18, в котором беспилотный летательный аппарат дополнительно содержит чувствительную к видимому свету камеру,
причем вторая совокупность машиночитаемых программных инструкций, при их исполнении вторым процессором, дополнительно настраивает второй процессор генерировать навигационные сигналы, подходящие для перемещения беспилотного летательного аппарата вдоль воздушного летательного аппарата, и управляющих сигналов, подходящих для управления работой камеры для записи изображения по меньшей мере части воздушного летательного аппарата, имеющего отметки для идентификации этого воздушного летательного аппарата, а
первая совокупность машиночитаемых программных инструкций, при их исполнении первым процессором, дополнительно настраивает первый процессор принимать от беспилотного летательного аппарата сигналы изображения, указывающие на изображение по меньшей мере части воздушного летательного аппарата, и определять модель и регистрационный номер воздушного летательного аппарата на основании сигналов изображения, принятых от беспилотного летательного аппарата.
Заключение
Настоящее изобретение может охватывать множество различных изобретений, имеющих индивидуальное преимущество. Несмотря на то, что каждое из этих изобретений было описано в своей предпочтительной форме или своих предпочтительных формах, их конкретные варианты реализации, описанные и показанные в настоящем документе, не следует рассматривать в качестве ограничения, поскольку возможны многочисленные изменения. В тех случаях, когда заголовки разделов использованы в пределах настоящего документа, такие заголовки приведены исключительно для организационных целей, и они не образуют характеристику любого заявленного изобретения. Сущность изобретения или изобретений содержит все новые и неочевидные комбинации различных элементов, признаков, функций и/или свойств, раскрытых в настоящем документе. В частности, в приведенной далее формуле изобретения приведены конкретные комбинации и субкомбинации, считаемые новыми и неочевидными. Изобретение или изобретения, реализованные в других комбинациях и субкомбинациях признаков, функций, элементов и/или свойств могут быть заявлены в заявках, испрашивающих приоритет этой заявки или соответствующей заявки. Такие пункты формулы изобретения, несмотря на то, направлены ли они на другое изобретение или на то же самое изобретение, а также несмотря на то, шире ли они, уже ли, равны ли или отличны ли по объему по отношению к первоначальной формуле изобретения, также считаются включенными в сущность изобретения или изобретений согласно настоящему изобретению.

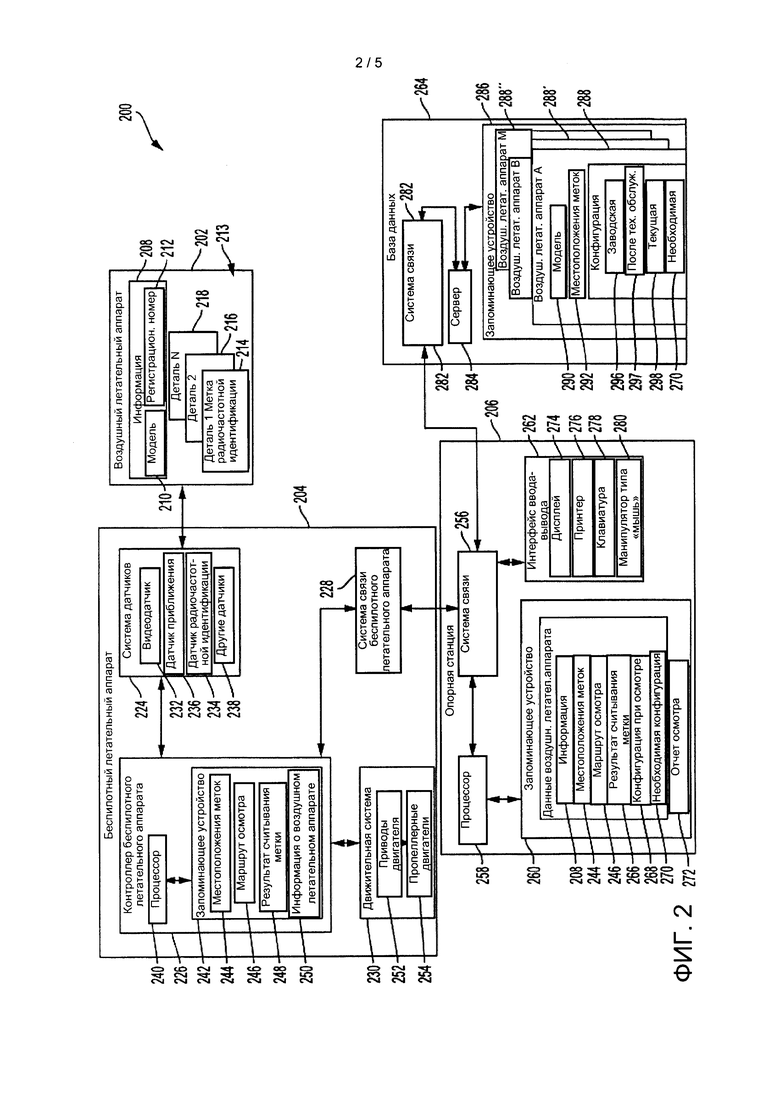


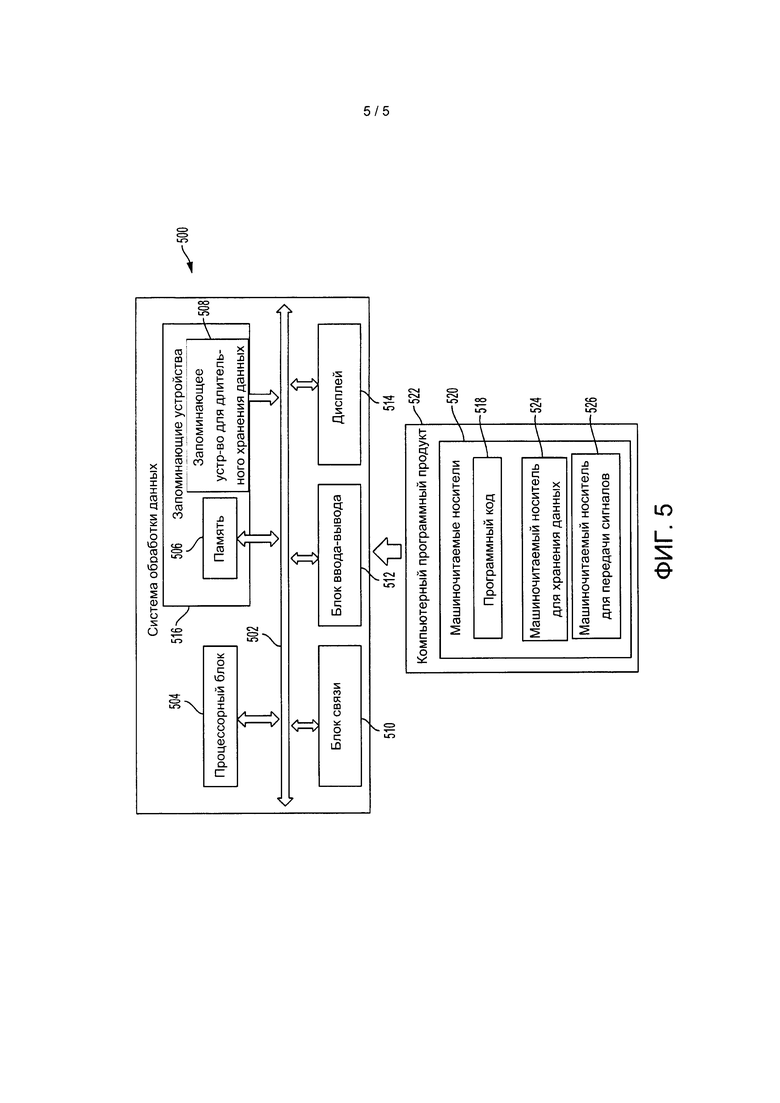
Группа изобретений относится к системе осмотра воздушного летательного аппарата и способу определения о нем информации. Система содержит беспилотный летательный аппарат и опорную станцию. Беспилотный летательный аппарат содержит считывающее устройство, контроллер, приемопередатчик. Опорная станция содержит систему связи, контроллер и запоминающее устройство. Для определения информации о воздушном летательном аппарате принимают на опорной станции карту расположения его меток радиочастотной идентификации, передают ее на беспилотный летательный аппарат, в котором генерируют на основании принятой карты навигационные сигналы для управления его перемещением рядом с меткой радиочастотной идентификации, находящейся на воздушном летательном аппарате в определенном для нее месте, передают на опорную станцию от беспилотного летательного аппарата считанные данные метки радиочастотной идентификации для определения информации о воздушном летательном аппарате. Обеспечивается осуществление технического обслуживания воздушного летательного аппарата и получение точной описи запасных частей. 2 н. и 12 з.п. ф-лы, 5 ил.
1. Система (100) осмотра воздушного летательного аппарата для определения информации о воздушном летательном аппарате (106), содержащая:
- беспилотный летательный аппарат (102), имеющий считывающее устройство (234) радиочастотной идентификации, контроллер (226) и приемопередатчик, причем
считывающее устройство (234) выполнено с возможностью считывания метки (213) радиочастотной идентификации, находящейся на воздушном летательном аппарате (106) в идентифицированном месте и имеющей идентифицирующие данные, связанные с воздушным летательным аппаратом,
контроллер (226) выполнен с возможностью приема карты (244) расположения меток радиочастотной идентификации воздушного летательного аппарата (106) и с возможностью генерации навигационных сигналов по меньшей мере частично на основании карты (244) расположения меток радиочастотной идентификации для перемещения рядом с идентифицированным местом, а
приемопередатчик выполнен с возможностью связи с контроллером (226) беспилотного летательного аппарата и с возможностью беспроводных приема и передачи данных, и
- опорную станцию (206), содержащую систему (256) связи, контроллер (258) опорной станции, функционально соединенный с системой связи (256), и запоминающее устройство (242) для хранения данных, функционально соединенное с контроллером (258) опорной станции, причем
система (282) связи выполнена с возможностью беспроводной связи с беспилотным летательным аппаратом (102), а контроллер (258) опорной станции выполнен
с возможностью приема карты (244) расположения меток радиочастотной идентификации воздушного летательного аппарата (106) и возможностью передачи указанной карты на беспилотный летательный аппарат (102),
с возможностью приема от беспилотного летательного аппарата (204) связанных со считыванием данных (266), содержащих идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки (213) радиочастотной идентификации в определенном для нее месте, и
с возможностью определения информации (266) о воздушном летательном аппарате (106) на основании принятых связанных со считыванием данных.
2. Система (100) осмотра по п. 1, в которой идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате (106),
причем контроллер (258) опорной станции дополнительно выполнен с возможностью приема данных о необходимой конфигурации воздушного летательного аппарата (106) и с возможностью определения, соответствуют ли данные для идентификации компонента, принятые от беспилотного летательного аппарата, компоненту, согласованному с данными о необходимой конфигурации.
3. Система (100) осмотра по п. 2, в которой контроллер (258) опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
4. Система (100) осмотра по п. 2, в которой
контроллер (226) беспилотного летательного аппарата выполнен с возможностью передачи на опорную станцию (104) связанных со считыванием данных (266), указывающих на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента, когда в месте, определенном для метки радиочастотной идентификации, считывающим устройством (234) радиочастотной идентификации не было принято никаких данных для идентификации компонента, а
контроллер (258) опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации.
5. Система (100) осмотра по п. 1, в которой карта (244) расположения меток радиочастотной идентификации содержит множество местоположений (244) меток радиочастотной идентификации,
причем контроллер (226) беспилотного летательного аппарата дополнительно выполнен с возможностью генерации навигационных сигналов по меньшей мере частично на основании принятой карты (244) расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата (204) последовательно в указанное множество местоположений (244) меток радиочастотной идентификации, и с возможностью передачи связанных со считыванием данных (266) на опорную станцию (104) для каждого из мест (244) расположения меток радиочастотной идентификации, в которые было осуществлено перемещение беспилотного летательного аппарата (204).
6. Система (100) осмотра по п. 5, в которой контроллер (258) опорной станции дополнительно выполнен:
с возможностью приема данных о необходимой конфигурации для каждого местоположения метки радиочастотной идентификации на воздушном летательном аппарате (106),
с возможностью определения, соответствуют ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата, компоненту, согласованному с данными о необходимой конфигурации, и
с возможностью генерации выходных данных, идентифицирующих компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, которые соответствуют компоненту, который не согласован с данными о необходимой конфигурации.
7. Система (100) осмотра по п. 6, в которой
контроллер (226) беспилотного летательного аппарата выполнен с возможностью передачи на опорную станцию (104) связанных со считыванием данных (266), указывающих на то, что в одном из указанного множества местоположений (244) меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, когда в указанном одном местоположении метки радиочастотной идентификации считывающим устройством (234) радиочастотной идентификации не было принято никаких данных для идентификации компонента, а
контроллер (258) опорной станции дополнительно выполнен с возможностью генерации выходных данных, идентифицирующих данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
8. Способ определения информации о воздушном летательном аппарате (202), согласно которому:
принимают на опорной станции (206) карту (244) расположения меток радиочастотной идентификации воздушного летательного аппарата (202),
передают на беспилотный летательный аппарат (204) карту (244) расположения меток радиочастотной идентификации воздушного летательного аппарата (202),
генерируют, посредством беспилотного летательного аппарата (204), навигационные сигналы по меньшей мере частично на основании принятой карты (244) расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата (204) рядом с меткой (213) радиочастотной идентификации, находящейся на воздушном летательном аппарате в определенном для нее месте, причем метка радиочастотной идентификации имеет идентифицирующие данные, связанные с воздушным летательным аппаратом,
принимают, посредством опорной станции (206), от беспилотного летательного аппарата (204) связанные со считыванием данные (266), содержащие идентифицирующие данные, связанные с воздушным летательным аппаратом, при нахождении метки (213) радиочастотной идентификации в определенном для нее месте, и
определяют на опорной станции (206) информацию (266) о воздушном летательном аппарате (202) на основании принятых связанных со считыванием данных.
9. Способ по п. 8, согласно которому идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, установленному на воздушном летательном аппарате (202),
причем согласно указанному способу дополнительно принимают, посредством опорной станции (206), данные о необходимой конфигурации воздушного летательного аппарата (202) и определяют, посредством опорной станции (206), содержат ли идентифицирующие данные, связанные с воздушным летательным аппаратом и принятые от беспилотного летательного аппарата (204), данные для идентификации компонента, которые соответствуют компоненту, согласованному с данными о необходимой конфигурации.
10. Способ по п. 9, согласно которому дополнительно генерируют, посредством опорной станции (206), выходные данные, идентифицирующие компонент, если идентифицирующие данные, связанные с воздушным летательным аппаратом, содержат данные для идентификации компонента, соответствующие компоненту, который не согласован с данными о необходимой конфигурации.
11. Способ по п. 9, согласно которому прием связанных со считыванием данных (266) включает прием связанных со считыванием данных (266), указывающих на то, что не было считано никаких данных для идентификации компонента в месте, определенном для метки радиочастотной идентификации,
причем согласно указанному способу дополнительно генерируют, посредством опорной станции, выходные данные, идентифицирующие данные о необходимой конфигурации для указанного местоположения метки радиочастотной идентификации, когда связанные со считыванием данные (266) указывают на то, что в месте, определенном для метки радиочастотной идентификации, не было считано никаких данных для идентификации компонента.
12. Способ по п. 8, согласно которому карта (244) расположения меток радиочастотной идентификации содержит множество местоположений (244) меток радиочастотной идентификации, причем
генерирование навигационных сигналов включает генерирование навигационных сигналов по меньшей мере частично на основании карты (244) расположения меток радиочастотной идентификации, подходящей для управления перемещением беспилотного летательного аппарата (204) последовательно в указанное множество местоположений (244) меток радиочастотной идентификации, а
прием связанных со считыванием данных (266) включает прием связанных со считыванием данных (266) от беспилотного летательного аппарата (204) для каждого местоположения из указанного множества местоположений (244) меток радиочастотной идентификации.
13. Способ по п. 12, согласно которому дополнительно:
принимают данные о необходимой конфигурации для каждого местоположения из указанного множества местоположений (244) меток радиочастотной идентификации,
определяют, содержат ли связанные со считыванием данные (266), принятые от беспилотного летательного аппарата (204), данные для идентификации компонента, соответствующие компоненту, согласованному с данными о необходимой конфигурации, и
генерируют выходные данные, идентифицирующие компонент, которому соответствуют данные для идентификации компонента, если эти данные для идентификации компонента не согласованы с данными о необходимой конфигурации.
14. Способ по п. 13, согласно которому
прием связанных со считыванием данных (266) включает прием связанных со считыванием данных (266), указывающих на то, что в одном из указанного множества местоположений (244) меток радиочастотной идентификации не было считано никаких данных для идентификации компонента, а
генерирование выходных данных включает генерирование выходных данных, идентифицирующих данные о необходимой конфигурации для указанного места расположения метки радиочастотной идентификации.
| US 20150269787 A1, 24.09.2015 | |||
| US 8392045 B2, 05.03.2013 | |||
| US 8812154 B2, 19.08.2014 | |||
| EP 2937756 A1, 28.10.2015. |

