ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к автономной навигации транспортных средств, в частности к системам, способам и технологиям для обнаружения стационарных и/или движущихся объектов и автоматической навигации вокруг таких объектов. Кроме того, настоящее изобретение относится к независящим от датчиков и транспортных средств системам, способам и технологиям обнаружения объектов и автоматической навигации вокруг них.
УРОВЕНЬ ТЕХНИКИ
Технология беспилотных летательных аппаратов (Unmanned aerial vehicle, UAV) доказала, что она является полезным инструментом для программ полета, которые предполагают получение информации, наблюдение, разведку и доставку полезной нагрузки. В ситуациях, таких как разведка в городе на малой высоте, беспилотный летательный аппарат (UAV), такой как микро летательный аппарат (micro-air vehicle, MAV), может столкнуться с большими и маленькими препятствиями, которые могут иметь постоянное местоположение или могут совершать перемещение, при этом их местоположение не является заранее известным. Кроме того, поскольку беспилотные летательные аппараты (UAV) и микро летательные аппараты (MAV) обычно летают в ограниченных загроможденных средах, то они склонны терпеть крушения или сталкиваться с объектами. Кроме того, беспилотные летательные аппараты (UAV) и микро летательные аппараты (MAV) в целом имеют меньшую стоимость по сравнению с обычными летательными транспортными средствами, в силу чего они более широко распространены и часто используются менее опытными пилотами, что в свою очередь также может привести к столкновению. Существующая технология предотвращения столкновения беспилотных летательных аппаратов (UAV) и микро летательных аппаратов (MAV) с объектами и иными препятствиями, например глобальная навигационная спутниковая система (Global Positioning System, GPS), в целом не соответствует требованиям, поскольку многие объекты не могут быть распознаны устройством на основе глобальной навигационной спутниковой системы (GPS), при этом в зависимости от местности точность глобальной навигационной спутниковой системы (GPS) сильно меняется в пределах окружающих сред.
Следовательно, все еще существует потребность в разработке улучшенных навигационных систем для автономной навигации транспортных средств и систем обхода препятствий, которые могут реагировать на разнообразные и неизвестные препятствия в загроможденных навигационных средах. Кроме того, также существует потребность в разработке системы навигации автономного транспортного средства или обхождения препятствий для усиления и/или подавления навигационных команд, передаваемых на транспортное средство.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Автономное транспортное средство может быть улучшено с использованием системы управления полетом, содержащей множество датчиков (например, акустические датчики, датчики визуального контроля или т.п.). Множество датчиков может быть использовано вместе с техническим решением по предупреждению столкновений для небольших летательных транспортных средств, таким как система «Panoptes™» предупреждения столкновений, относящаяся, в частности, к системе динамического обхода препятствий.
Согласно первому аспекту, предложен способ обеспечения защиты от столкновений в летательном аппарате, включающий: прием входных данных датчика от датчика, размещенного на летательном аппарате и функционально соединенного с процессором, при этом датчик выполнен с возможностью идентификации препятствий в пределах поля зрения; прием потока команд пилота от пилота; осуществление идентификации препятствия в пределах поля зрения по меньшей мере частично на основании входных данных датчика; определение зоны из множества зон в пределах поля зрения, в которой находится препятствие, по меньшей мере частично на основании входных данных датчика; задание входных данных управления как функции зоны, определенной на указанном этапе определения; осуществление ввода входных данных управления в пропорционально-дифференциальный контроллер для создания данных управления; генерирование, посредством процессора, потока команд управления как функции данных управления; и сравнение, посредством процессора, потока команд управления с потоком команд пилота для определения, является ли безопасным поток команд пилота от пилота.
Согласно второму аспекту, предложена навигационная система для обеспечения защиты от столкновений в летательном аппарате, содержащая: датчик, выполненный с возможностью соединения с летательным аппаратом и возможностью идентификации препятствий в пределах поля зрения; процессор, функционально соединенный с датчиком и запоминающим устройством, при этом процессор выполнен с возможностью приема потока команд пилота от пилота и дополнительно выполнен с возможностью: идентификации препятствия в пределах поля зрения по меньшей мере частично на основании входных данных датчика от датчика; определения зоны из множества зон в пределах поля зрения, в которой находится препятствие, по меньшей мере частично на основании входных данных датчика; задания входных данных управления как функции зоны, определенной на указанном этапе определения; ввода входных данных управления в пропорционально-дифференциальный контроллер для создания данных управления; создания, посредством процессора, потока команд управления как функции данных управления; и сравнения, посредством процессора, потока команд управления с потоком команд пилота для определения, является ли безопасным поток команд пилота от пилота.
В конкретных аспектах в случае, когда определено, что поток команд пилота не является безопасным, обеспечена возможность передачи потока команд управления в контроллер для управления полетом летательного аппарата вместо потока команд пилота.
В конкретных аспектах в случае, когда поток команд пилота от пилота определен как безопасный, обеспечена возможность передачи потока команд пилота в контроллер для управления полетом летательного аппарата.
В конкретных аспектах входные данные датчика содержат оценку скорости сближения или оценку дальности.
В конкретных аспектах поток команд пилота является потоком от пилота, являющегося человеком.
В конкретных аспектах поток команд пилота является потоком от автопилота.
В конкретных аспектах множество зон содержит первую зону, вторую зону и третью зону, такие как входящая зона, паническая зона и/или критическая зона.
В конкретных аспектах первая зона определена как область между максимальной дальностью действия датчика и первым пороговым значением (например, входящим пороговым значением).
В конкретных аспектах вторая зона определена как область между первым пороговым значением и вторым пороговым значением.
В конкретных аспектах третья зона определена как область между вторым пороговым значением (например, паническим пороговым значением) и летательным аппаратом.
В конкретных аспектах поток команд пилота оказывается определенным как небезопасный в случае, если поток команд пилота интерпретирован процессором как попытка (1) уменьшить дальность между летательным аппаратом и препятствием или (2) увеличить скорость летательного аппарата выше предела скорости, заданного данными управления.
В конкретных аспектах команды блокировки пилота могут быть приняты от пилота, при этом команда блокировки пилота блокирует поток команд управления.
В конкретных аспектах процессор выполнен с возможностью осуществления операции фильтрации целей.
В конкретных аспектах операция фильтрации целей включает следующие этапы: осуществление приема данных о дальности и амплитуде от радиолокационной системы для препятствия в пределах прямой видимости летательного аппарата; определение, посредством процессора, является ли амплитуда предельной, по меньшей мере частично на основании данных о дальности и амплитуде; вычисление, посредством процессора, стандартного отклонения по меньшей мере части кривой, отражающей данные о дальности и амплитуде со временем; определение, посредством процессора, новой точки дальности на кривой; вычисление, посредством процессора, минимальной разницы между новой точкой дальности на кривой и заданной дальностью из входящих данных; и вычисление, посредством процессора, достоверности и низкочастотного значения с использованием фильтра нижних частот с критическим затуханием (LPF).
В конкретных аспектах достоверность и низкочастотное значение вычисляют с использованием взвешенного среднего статистических показателей, полученных из среднего сигналов, стандартного отклонения и амплитуды.
В конкретных аспектах взвешенное среднее задано оператором для обеспечения необходимых технических характеристик фильтра.
Согласно третьему аспекту, предложен способ обеспечения фильтрации целей для увеличения точности в летательном аппарате, включающий: осуществление приема данных о дальности и амплитуде от радиолокационной системы для препятствия в пределах прямой видимости летательного аппарата; определение, посредством процессора, для каждого из заданного количества препятствий, является ли амплитуда предельной, по меньшей мере частично на основании данных о дальности и амплитуде, при этом процессор выполнен с возможностью задания диапазонов в заведомо хорошее значение в случае, если амплитуда является предельной; вычисление, посредством процессора, стандартного отклонения по меньшей мере части кривой, отражающей данные о дальности и амплитуде со временем; определение, посредством процессора, новой точки дальности на кривой; вычисление, посредством процессора, минимальной разницы между новой точкой дальности на кривой и заданной дальностью из входящих данных; определение, посредством процессора, удовлетворено ли каждое из множества условий, при этом процессор выполнен с возможностью вычисления новой фильтруемой точки дальности с использованием линейной регрессии в случае, если не удовлетворены одно или более из указанного множества условий; увеличение счетчика итераций; и вычисление, посредством процессора, достоверности и низкочастотного значения с использованием фильтра нижних частот с критическим затуханием (LPF).
В конкретных аспектах каждый из этапов осуществляют или повторяют для каждого из заданного количества препятствий в пределах прямой видимости летательного аппарата.
В конкретных аспектах заданное количество препятствий содержит пять препятствий, которые являются наиболее заметными в пределах прямой видимости летательного аппарата.
В конкретных аспектах стандартное отклонение получено на основе последних 20 точек кривой путем линейной регрессии этих 20 точек.
В конкретных аспектах минимальная разница представляет собой разницу между последним значением дальности на кривой и заданной дальностью из входящих данных.
В конкретных аспектах множество условий содержит: (1) превышает ли минимальная разница стандартное отклонение в 3,5 раза; и (2) превышает ли минимальная разница 0,4.
В конкретных аспектах множество условий дополнительно содержит: (1) меньше ли стандартное отклонение 0,2; и (2) меньше ли счетчик итераций 15.
В конкретных аспектах достоверность и низкочастотное значение вычисляют с использованием взвешенного среднего статистических показателей, полученных из среднего сигналов, стандартного отклонения и амплитуды.
В конкретных аспектах взвешенное среднее задано оператором для обеспечения необходимых технических характеристик фильтра.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и иные объекты, признаки и преимущества устройств, систем и способов, описанных в данном документе, будут очевидны из приведенного далее описания их конкретных вариантов реализации, показанных на прилагаемых чертежах, при этом одинаковые ссылочные номера относятся к схожим конструктивным компонентам. Чертежи не обязательно приведены в масштабе; вместо этого упор сделан на иллюстрацию принципов устройств, систем и способов, описанных в данном документе.
На фиг. 1 показана среда для автономной навигации с использованием системы динамического предупреждения столкновений.
На фиг. 2а показан первый пример автономного транспортного средства, содержащего систему динамического предупреждения столкновений.
На фиг. 2b показан второй пример автономного транспортного средства, содержащего систему динамического предупреждения столкновений.
На фиг. 2с показано автономное транспортное средство, содержащее свои датчики, размещенные в обращенной книзу конфигурации.
На фиг. 2d показано автономное транспортное средство, содержащее свои датчики, размещенные в обращенной вперед конфигурации.
На фиг. 2е показано автономное транспортное средство, содержащее свои датчики, размещенные в обращенной вперед конфигурации и обращенной книзу конфигурации.
На фиг. 3 показана структурная схема системы динамического предупреждения столкновений и навигации для автономного транспортного средства.
На фиг. 4 показана блок-схема способа использования системы динамического предупреждения столкновений при навигации транспортного средства из заданного местоположения к целевому объекту.
На фиг. 5а-5 с показан пример радиолокационного модуля управления полетом и/или предупреждения столкновений (RFCA).
На фиг. 6а показана блок-схема примера функции трехзонного предупреждения столкновений с блокировкой пилота.
На фиг. 6b показано изображение летательного аппарата по отношению к трем зонам.
На фиг. 7 показана блок-схема примера модуля содействия посадке.
На фиг. 8 показана диаграмма, иллюстрирующая входные данные и выходные данные для иллюстративного фильтра целей.
На фиг. 9 показана блок-схема примера функции фильтрации целей.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Варианты реализации настоящего изобретения будут описаны в данном документе ниже со ссылкой на прилагаемые чертежи. В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения. В данном документе описаны устройства, системы и способы навигации автономного транспортного средства, в частности для навигации с использованием многочисленных способов обхода препятствий.
Все источники, упомянутые в данном документе, настоящим полностью включены в данный документ посредством ссылки. Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста. Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом, следует понимать, что термин «или» в целом означает «и/или» и т.п. Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации. Любые из примеров или они все или соответствующие слововыражения («например», «такой как» или т.п.), приведенные в данном документе, по существу используют для обеспечения лучшего раскрытия вариантов реализации, и они не накладывают ограничение на объем вариантов реализации. Ни одно из слововыражений в данном документе не следует толковать как указывающее на какой-либо незаявленный элемент как на важную составляющую при практической реализации вариантов реализации. Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В описании данного документа применены следующие термины и определения.
Термины «летательное транспортное средство» и «летательный аппарат» относятся к машине, выполненной с возможностью осуществления полета, в том числе, но без ограничения, летательному аппарату с неподвижным крылом, беспилотному летательному транспортному средству, летательному аппарату с подвижным крылом и летательному аппарату с вертикальными взлетом и посадкой (VTOL).
Термины «связь» и «обмен данными», использованные в данном документе, относятся к передаче или сообщению данных из одного источника в место назначения, а также к доставке данных в среду связи, систему, канал, сеть, устройство, провод, кабель, волокно, схему, и/или к ссылке, которую необходимо передать в место назначения.
Термины «схемы» и «схема» относится к физическим электронным компонентам (то есть аппаратным средствам), а также к любому программному обеспечению и/или программно-аппаратному обеспечению («код»), которые могут настраивать аппаратные средства, могут быть исполнены аппаратными средствами или могут быть связаны с аппаратными средствами. Например, конкретный процессор и конкретная память, использованные в данном документе, могут содержать первую «схему» в случае исполнения первой совокупности из одной или более строк кода и могут содержать вторую «схему» при исполнении второй совокупности из одной или более строк кода.
Термин «компьютер», использованный в данном документе, относится к программируемому устройству, выполненному с возможностью последовательного автоматического осуществления последовательности арифметических или логических операций, в том числе, без ограничения, персональным компьютерам (например, персональным компьютерам от компаний Gateway®, Hewlett-Packard®, IBM®, Sony®, Toshiba®, Dell®, Apple®, Cisco®, Sun® и т.п.), ручным процессорным устройствам и любому иному электронному устройству, оборудованному процессором или микропроцессором.
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки и т.п.).
Термин «процессор», использованный в данном документе, относится к обрабатывающему устройству, аппарату, программам, схемам, компонентам, системам и подсистемам независимо от того, реализованы ли они в виде аппаратных средств и/или встраиваемого программного обеспечения и являются ли они программируемыми или же нет. Термин «процессор», использованный в данном документе, содержит, но без ограничения, один или более компьютеров, аппаратные схемы, устройства модификации сигналов и системы, устройства и машины для управляющих систем, центральные процессоры, программируемые устройства и системы, программируемые вентильные матрицы, специальные интегральные схемы, системы на чипе, системы, содержащие дискретные компоненты и/или схемы, конечные автоматы, виртуальные машины и процессоры для обработки данных.
Термин «навигационная команда», использованный в данном документе, относится к инструкции для направления транспортного средства. Навигационные команды могут быть представлены или обеспечены системой управления полетом как цифровые или аналогвые данные инструкций или сигналы. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автопилотом, пилотом (как локально, так и удаленно) и/или системой обхода препятствий. Навигационные команды могут быть сообщены, например, контроллеру или механизму управления направлением перемещения.
В настоящем изобретении предпринята попытка разработать системы и способы для облегчения навигации автономного транспортного средства и/или обхода препятствий путем обнаружения угроз столкновения. Как описано в данном документе, навигация автономного транспортного средства и/или обход препятствий могут быть облегчены путем обнаружения одной или более угроз столкновения с использованием, помимо прочего, акустической технологии (например, датчика эхолокации), технологии визуального осмотра для регистрации объектов/препятствий (например, несвязанных целей, являющихся неподвижными и/или подвижными) или их сочетания. Примерами таких угроз столкновения могут являться препятствия, такие как, без ограничения, птицы, люди, иные транспортные средства, конструкции (например, здания, ворота, башни и т.п.), зеленая растительность (например, деревья, кустарники и т.п.) и т.п. Функциональные возможности по навигации автономного транспортного средства и/или обхождению препятствий (например, любые аппаратные средства и/или соответствующие способы) могут быть включены в систему управления летательного транспортного средства (например, систему для управления полетом человеком или автопилотом) во время его первоначального проектирования и производства; однако в качестве альтернативы такие функциональные возможности могут быть обеспечены вспомогательной системой (например, дополнительной системой или «доработанной» системой), выполненной с возможностью управления или блокировки имеющейся системы управления полетом. В случае, когда используют вспомогательные системы, они предпочтительно не требуют внесения изменений в имеющуюся систему управления полетом (например, первоначальные навигационные компоненты) или конструкцию летательного транспортного средства, что снижает непредусмотренное время сборки и стоимость с одновременным обеспечением поддержания любых гарантийных обязательств по компонентам, сертификатов и т.п.
В конкретных аспектах функциональные возможности по навигации автономного транспортного средства и/или функциональные возможности обходу препятствий могут и не зависеть от транспортного средства и датчиков. В действительности, зона пересечения у небольших беспилотных летательных аппаратов (UAV) обычно находится между максимальными дальностями действия датчиков эхолокации и датчиков визуального контроля и скоростями сближения по отношению к неподвижным препятствиям или движущимся объектам, в отношении которых эти датчики являются эффективными. Таким образом, функциональные возможности по навигации автономного транспортного средства, функциональные возможности по обходу препятствий и/или функциональные возможности по предупреждению столкновений могут использовать датчики эхолокации и/или датчики визуального контроля для измерения расстояния/дальности. Например, беспилотные летательные аппараты (UAV) и микро летательные аппараты (MAV) могут содержать датчики, содержащие электроакустические датчики, оптические датчики, радиолокационные датчики и/или устройство на основе технологии автоматического зависимого наблюдения-вещания (ADS-B) (например, приемник на основе технологии «ADS-B»).
Система навигации автономного транспортного средства и/или система обхода препятствий могут и не зависеть от датчиков и могут обрабатывать собранные данные, а также объединять собранную информацию (то есть данные), принятую от различных датчиков, для формирования глобальной оценки состояния окружающей среды. При использовании глобальной оценки состояния окружающей среды признаки, связанные с обнаружением препятствия навигационными алгоритмами или алгоритмами предупреждения столкновений, могут быть извлечены и сохранены в базе данных. Банк алгоритмов может получать доступ к базе данных для определения того, следует ли предпринимать действия по предупреждению столкновения после обнаружения угрозы столкновения. Кроме того, банк алгоритмов может получать доступ к базе данных для определения того, какое действие следует совершить в случае, если оно сочтено необходимым.
Если действие является необходимым, то система навигации автономного транспортного средства и/или система обхода препятствий может в дальнейшем взаимодействовать с ранее имевшейся транспортной инфраструктурой (например, имеющейся системой управления полетом) для предупреждения столкновения. В действительности, интерфейс между системой навигации автономного транспортного средства и/или обхождения препятствий и существующей системой могут и не зависеть от транспортного средства, что обеспечивает возможность его соединения с множеством различных летательных транспортных средств, в том числе с ранее известными летательными транспортными средствами.
На фиг. 1 показан пример окружающей среды 100 для автономной навигации, использующей раскрытую систему обхода препятствий, которая также может в целом называться системой динамического предупреждения столкновений, которая может способствовать функциональным возможностям электронного амортизатора (е-амортизатора). Окружающая среда 100 может содержать целевой объект 102, одну или более дорог 110 и любое количество препятствий, таких как здания 112, линии 114 электропередач, столбы 116 и деревья 118. Кроме того, окружающая среда 100 может дополнительно содержать непредвиденные препятствия 122 по пути, которые могут быть динамически обнаружены с использованием системы динамического предупреждения столкновений. Как показано, летательное транспортное средство может быть выполнено с возможностью следования по одному или более навигационным путям (например, навигационным путям 104, 106, 108) к целевому объекту 102, при этом каждый путь может быть обеспечен или определен посредством, например, автопилота и может быть создан с обеспечением устранения одного или более препятствий.
В соответствии по меньшей мере с одним аспектом летательное транспортное средство может быть выполнено с возможностью динамического обхождения непредвиденных препятствий 122 с использованием системы динамического предупреждения столкновений независимо от того, находится ли это летательное транспортное средство под управлением автопилота или удаленным управлением. В частности, после обнаружения угроз столкновения (например, непредвиденных препятствий 122) система динамического предупреждения столкновений может выдавать инструкции в летательное транспортное средство на основании результатов измерений, принятых, например, от множества датчиков, для блокирования любых команд от автопилота или пилота (например, посредством системы управления полетом) для обхода непредвиденных препятствий 122 и для окончательного возврата на навигационный путь.
На фиг. 2а и 2b показаны перспективные виды транспортного средства (например, автономное транспортное средство), подходящего для его использования с системой динамического предупреждения столкновений. Летательный аппарат 200, показанный на фиг. 2а, может содержать каркас 202, стойку 204 шасси, модуль 300 электронных средств (показан на фиг. 3) и один или более генераторов 206 тяги (например, турбину, двигатель или двигательную установку, соединенную с пропеллером, и т.п.). Модуль 300 электронных средств может быть выполнен за одно целое с каркасом 202 или обеспечен посредством отдельного корпуса или кожуха. На фиг. 2b показано второе транспортное средство, которое выполнено по существу аналогично летательному аппарату 200, показанному на фиг. 2а; однако датчики 210 второго транспортного средства размещены ближе к центру транспортного средства и помещены в отдельный корпус 208. В частности, несмотря на то, что один корпус может подходить для конкретных применений, два или более отдельных корпусов 208 (например, усовершенствованные модули навигации, такие как модули навигации, описанные со ссылкой на фиг. 5а-5с) могут быть размещены вокруг периметра летательного аппарата 200 для обеспечения поля зрения, которое ориентировано с использованием линии полета летательного транспортного средства. Отдельный корпус 208 может быть выполнен с возможностью открепления от каркаса 202 и может быть дополнительно выполнен с возможностью размещения в нем модуля 300 электронных средств или его части (например, выполняет функцию корпуса для модуля 300 электронных средств). Кроме того, функциональные возможности отдельного корпуса 208 могут быть распределены подходящим образом так, что они не требуют внесения изменений в первоначальные навигационные компоненты или конструкции, выполненные неподвижными по отношению к летательному транспортному средству.
Следовательно, датчики 210 могут быть размещены на летательном аппарате 200 в обращенной книзу конфигурации, показанной на фиг. 2с, для обнаружения преграды ниже обращенной книзу конфигурации, а также в обращенной вперед конфигурации, показанной на фиг. 2d, для обнаружения преграды впереди летательного аппарата 200 или их сочетании, показанном на фиг. 2е. Следует учитывать, что датчики 210 могут быть дополнительно размещены на сторонах, снизу и/или сверху летательного аппарата 200 для обнаружения препятствий и иных угроз во всех направлениях по отношению к летательному аппарату 200. Таким образом, следует учитывать, что местоположение датчика 210 может быть определено разработчиком как являющееся необходимым для конкретной цели, типа датчика и/или операции, в связи с чем оно не ограничено местами размещения, описанными в данном документе. Стойка 204 шасси может представлять собой простые полозковые шасси, как показано, или любое иное устройство, выполненное с возможностью обеспечения опоры для летательного аппарата 200 в случае, когда оно не находится в полете, с одновременным обеспечением возможности взлета, посадки и/или руления без повреждений, например колеса, а также полозковые шасси, лыжное шасси, поплавки или их сочетания. Кроме того, стойка 204 шасси может быть выполнена с возможностью втягивания для снижения лобового сопротивления при нахождении в полете.
Для содействия управляемому полету путем регулирования крена, тангажа и рысканья летательного аппарата 200 летательный аппарат 200 может дополнительно содержать один или более механизмов 304 управления направлением перемещения или эквивалентные управляющие системы, выполненные соответственно с возможностью приема навигационной команды и возможностью реагирования на навигационную команду. Для этого механизм 304 управления направлением перемещения может быть функционально соединен с контроллером или может содержать один или более процессоров, исполнительных устройств, двигателей и/или иных устройств (например, электрических или электромеханических устройств), выполненных с возможностью приема навигационной команды и возможностью реагирования на навигационную команду. Подходящие механизмы 304 управления направлением перемещения имеют, без ограничения, обычные рули управления полетом (например, закрылки, элероны, рули высоты, рули высоты, рули направления, пневматические тормоза и/или иные рули управления полетом), а также иные механизмы управления полетом, такие как системы управления с изменяемым направлением вектора тяги. Функциональные возможности по управлению с изменяемым вектором тяги могут быть облегчены путем перемещения генераторов 206 тяги для направления тяги в необходимом направлении, что обеспечивает управление полетом. Например, составная компоновка электродвигателя может использовать управление с изменяемым вектором тяги для направленного изменения вектора тяги. В действительности, независимо поворачивающиеся стойки двигателя с управляемым вектором тяги обеспечивают возможность быстрого перехода между вертикальным полетом и горизонтальным полетом. В конкретных аспектах летательный аппарат 200 может дополнительно содержать два или более килей (например, вертикальные стабилизаторы и/или горизонтальные стабилизаторы), в частности в отношении летательных транспортных средств с фиксированным крылом.
Летательный аппарат 200 может дополнительно содержать полезную нагрузку для получения информации, наблюдения, разведки (ISR), что обеспечивает возможность сбора данных. Например, летательный аппарат 200 может быть оборудован стойкой для полезной нагрузки, содержащей одну или более камер, аудио-устройства и иные датчики. Любые видеоданные, изображения, аудиоданные, данные телеметрии и/или иные данные датчиков («данные наблюдений»), собранные беспилотным летательным аппаратом 106 (UAV), могут быть локально сохранены или переданы по беспроводной линии связи из летательного аппарата 200 в удаленное местоположение в реальном времени с использованием антенны, соединенной с бортовым устройством беспроводной связи, таким как передатчик/приемник. В качестве альтернативы данные наблюдений могут быть сообщены или иным образом переданы в удаленное местоположение или другой стороне посредством проводного соединения (например, при установлении привязки или наземной постобработке).
Несмотря на то, что транспортные средства 200, показанные на фиг. 2а-2е, представляют собой воздушные транспортные средства с вертикальными взлетом и посадкой (VTOL), следует понимать, что автономные транспортные средства, описанные в данном документе, могут содержать любое транспортное устройство, устройство, компонент, элемент и т.п., в отношении которых может быть осуществлена эффективная навигация с использованием принципов системы динамического предупреждения столкновений, раскрытой в данном документе, в том числе, без ограничения, любое беспилотное транспортное средство, управляемое человеком транспортное средство, летательное транспортное средство, наземное транспортное средство, водное транспортное средство, космическое транспортное средство, транспортное средство с удаленным управлением, транспортное средство больших размеров, транспортное средство малых размеров и т.п., если явно не указано иное или явно не следует из описания. Например, автономные транспортные средства, описанные в данном документе, могут содержать вертолеты или иные транспортные средства, использующие горизонтальные пропеллеры для осуществления подъема и т.п. В качестве дополнения или альтернативы автономные транспортные средства, описанные в данном документе, могут содержать воздушные транспортные средства с возможностью полета вперед, такие как воздушные транспортные средства с неподвижным крылом. Для обеспечения дополнительной информации другие подходящие автономные транспортные средства раскрыты более подробно в патенте США №8,500,067 на изобретение «Модульный миниатюрный беспилотный летательный аппарат с управлением с изменяемым вектором тяги» и опубликованной заявке на выдачу патента США №2015/0260526 на изобретение «Навигационная система и способ навигации автономных транспортных средств». В опубликованной заявке на выдачу патента США №2015/0260526, например, описаны летательный аппарат и полезная нагрузка в виде датчиков для обеспечения улучшенной навигационной системы, преимущество которой состоит в наличии камер и датчиков эхолокации, имеющих перекрывающиеся поля зрения.
Модуль электронных средств может быть в целом использован для размещения в нем авиационного радиоэлектронного оборудования транспортного средства, источника питания (например, батареи движителя, генератора или т.п.), полезной нагрузки в виде датчиков, а также устройства связи или системы связи. Как описано выше, модуль электронных средств может быть выполнен за одно целое с каркасом 202 или может содержаться в отдельном корпусе, который также может потенциально обеспечивать жесткость каркаса 202. Таким образом, модуль электронных средств может быть выполнен с возможностью извлечения из каркаса 202 и с возможностью повторного размещения в каркасе 202, а также может вмещать любые системы или подсистемы е-амортизатора и/или навигационные системы и способы, предусмотренные в данном документе. Модуль электронных средств могут содержать электронные средства и аппаратные средства, используемые для поддержки или содействия е-амортизатору и навигационной системе и способам. Однако конкретные электронные средства и/или аппаратные средства могут быть выполнены за пределами корпуса для модуля электронных средств. Например, летательный аппарат 200 может дополнительно содержать один или более датчиков 210, используемых для облегчения автономного полета, которые могут содержать, без ограничения, датчики эхолокации, ультразвуковые датчики, инфракрасные датчики, радиолокационные датчики и т.п. Датчики 210 могут быть надлежащим образом установлены на летательном аппарате 200 с тем, чтобы обеспечить функциональные возможности. Например, конкретные датчики (например, датчики визуального контроля или акустические датчики) могут быть размещены на летательном аппарате 200 за пределами корпуса для модуля электронных средств (при использовании), поскольку размещение конкретных датчиков в корпусе для модуля электронных средств может создать помеху или помешать функциональным возможностям датчика. Например, как показано на фиг. 2а и 2b, датчики 210 могут быть размещены на поверхностях каркаса 202 (например, сверху, снизу, на краях и т.п.) и/или поверх корпуса для модуля электронных средств (например, отдельного корпуса 208).
Датчики 210 могут использовать один или более датчиков эхолокации, которые в целом выполняют функцию по излучению звука со звуковой частотой в среду и обнаружению любых эхосигналов звука со звуковой частотой, которые отражаются от препятствий рядом с датчиками эхолокации. При использовании мощности эхо-сигнала и/или направления отраженного эхо-сигнала, эхосигналы могут быть использованы для установления местоположения и/или идентификации препятствий, что в свою очередь может вызвать изменение направления летательного транспортного средства для предупреждения столкновения с одним или более препятствиями.
Независимо от типа используемых датчиков 210, система динамического предупреждения столкновений может быть выполнена с возможностью блокирования или подавления команд от удаленно расположенного пилота в случае, когда такие команды могут привести к столкновению летательного аппарата с препятствием. Следовательно, система динамического предупреждения столкновений обеспечивает: (1) подавление входных данных оператора, которые могли бы привести к столкновению; и, при необходимости, (2) активное уменьшение компонента скорости в направлении объекта.
Для этого датчик может быть размещен для получения поля зрения в направлении движения транспортного средства, что обеспечивает идентификацию потенциального препятствия на пути летательного аппарата 200. Например, один датчик (или одна группа датчиков) может быть обеспечен на передней части транспортного средства для обнаружения угрозы столкновения (например, преграды или препятствия) на пути транспортного средства. Кроме того, множество датчиков 210 (или многочисленные группы датчиков) может быть размещено вокруг периметра (и/или сверху и снизу) летательного аппарата 200 для обеспечения поля зрения, которое ориентировано в соответствии с линией полета летательного аппарата 200. Следовательно, множество датчиков 210 может обеспечивать возможность обнаружения летательным аппаратом 200 угрозы столкновения с любой стороны летательного аппарата 200.
Как описано в данном документе, датчики 210 могут содержать, помимо прочего, любой датчик визуального контроля или любой датчик эхолокации, которые известны в области техники или которые станут известны в области техники, в том числе, без ограничения, ультразвуковые датчики и т.п. В одном из аспектов камеры 206 могут быть использованы для идентификации больших объектов посредством трехмерных технологий реконструкции, таких как оптический поток. Несмотря на то, что это может обеспечивать информацию, полезную для автономной навигации, задержка на обработку, связанная с получением оптических изображений, а также чувствительность к видимости различных типов объектов, могут ограничивать применимость оптических измерительных технологий для обнаружения небольших быстро приближающихся объектов на линии полета транспортного средства. При ориентации датчиков 210 по линии полета акустическое обнаружение может дополнять оптическое обнаружение и может быть использовано для незамедлительного обнаружения преград, что должно привести к осуществлению транспортным средством ответных маневров.
Следует учитывать, что одной из задач акустических датчиков является незамедлительное обнаружение препятствий непосредственно на пути полета (или иной линии движения), в частности препятствия, которое не может быть обнаружено с использованием технологий визуального обнаружения или иных технологий. Соответственно, следует учитывать, что одной из задач датчиков 210 является незамедлительное обнаружение препятствий в конкретном направлении (например, любом направлении транспортного средства), в частности препятствия, которые не могут быть легко обнаружены с использованием технологий визуального обнаружения или иных технологий. Несмотря на то что в этой ситуации блок эхолокации работает надлежащим образом, в качестве дополнения или альтернативы для быстрого и точного обнаружения препятствий могут быть подходящим образом использованы и иные системы датчиков, такие как лазерные технологии или любые другие подходящие технологии, оптические методы, акустические методы, радиочастотные методы или иные методы измерения. В системах и способах, описанных в данном документе, вместо датчиков эхолокации может быть использована любая такая технология, подходящая для реализации в автономном транспортном средстве и обеспечивающая точную и быструю идентификацию преград. Таким образом, система динамического предупреждения столкновений в целом не зависит от датчиков, поскольку она может быть выполнена с возможностью использования одного множества различных технологий датчиков или их сочетания. Например, система динамического предупреждения столкновений может использовать сочетание датчиков визуального контроля и акустических датчиков.
Несмотря на то, что модуль электронных средств может быть обеспечен в качестве одиночного корпуса, вместо этого этот модуль электронных средств может содержать многочисленные корпуса или «подкорпуса». Например, модуль электронных средств может быть разделен на два корпуса, в частности на первый корпус для более тяжелых компонентов, таких как батарея, и второй корпус для более чувствительных компонентов, таких как авиационное электронное оборудование, полезная нагрузка для ведения наблюдений, полезная нагрузка в виде датчиков и любое другое электронное оборудование. Компоненты могут быть распределены или разделены между корпусами для обеспечения необходимого распределения веса по каркасу 202.
Система управления полетом может быть использована для управления и/или навигации летательного аппарата 200. Система управления полетом не обязательно должна представлять собой отдельный физический объект на транспортном средстве, а скорее может представлять собой компонент большей навигационной системы или может сама содержать все из компонентов навигационной системы. Если явно не указано иное или явно не следует из описания, любые компоненты, описанные со ссылкой на навигационную систему, могут быть также использованы системой управления полетом или могут содержаться в системе управления полетом и наоборот. При работе система управления полетом может определять и/или инструктировать летательный аппарат 200 следовать навигационному пути для достижения необходимого места на основании сигналов, принятых от компонентов навигационной системы. Например, система управления полетом может содействовать функциональным возможностям автопилота и/или реагировать на команды теленавигации. Для этого система 306 управления полетом может соединять летательный аппарат 200 с возможностью обмена данными с удаленным местоположением и может быть выполнена с возможностью отправки сигналов и возможностью приема сигналов между (например, в и от) летательным аппаратом 200 и удаленным местоположением. Функциональные возможности навигационного модуля могут быть распределены любым подходящим способом между компонентами в системе управления полетом, компонентами, расположенными где-то в летательном аппарате 200, и/или удаленно расположенными компонентами. Кроме того, подходящий электронный механический интерфейс связи может быть обеспечен для облегчения извлечения модуля электронных средств из каркаса 202 и повторного размещения модуля электронных средств в каркасе 202.
На фиг. 3 показана структурная схема летательного аппарата 200 (например, автономного транспортного средства), содержащего систему 306 управления полетом, систему 302 динамического предупреждения столкновений, модуль 300 электронных средств и механизм 304 управления направлением перемещения. В частности, на фиг. 3 показан модуль 300 электронных средств, используемый для размещения в нем системы 306 транспортного средства для управления полетом, источника питания 336 (например, батареи движителя), полезной нагрузки в виде датчиков (например, полезной нагрузки 334 для получения информации, наблюдения, разведки (ISR)) и устройства связи 338 или устройства 338 связи или содержащие указанные компоненты. Однако, несмотря на то что на фиг. 3 показана конкретная компоновка, следует понимать, что компоновка компонентов может быть изменена. Например, система 306 управления полетом и/или система 302 динамического предупреждения столкновений могут быть размещены в одном или более специальных корпусах и/или выполнены с возможностью извлечения из летательного аппарата 200. Например, функциональные возможности системы динамического предупреждения столкновений могут быть обеспечены посредством усовершенствованного навигационного модуля, соединенного с возможностью отсоединения или съемно соединенного с транспортным средством (например, посредством каркаса). Такой усовершенствованный навигационный модуль может быть выполнен с возможностью улавливания и возможностью модифицирования сигналов или навигационных команд, как описано в данном документе.
В качестве альтернативы система 306 управления полетом и/или система 302 динамического предупреждения столкновений могут быть встроены в летательный аппарат 200 и соединены с возможностью обмена данными с модулем 300 электронных средств и/или механизмом 304 управления направлением перемещения. В конкретных вариантах реализации система 306 управления полетом и/или система 302 динамического предупреждения столкновений могут совместно использовать компоненты, такие как память, датчики, процессоры или контроллеры. Кроме того, модуль 300 электронных средств может быть соединен с возможностью отсоединения с летательным аппаратом 200 или может быть встроен в фюзеляж или т.п. летательного аппарата 200 любым необходимым образом. Таким образом, компоновка различных компонентов может быть выполнена необходимым образом проектировщиком или оператором и, следовательно, не должна быть ограничена конкретным примером, описанным и показанным в данном документе. Например, система 306 управления полетом и/или система 302 динамического предупреждения столкновений могут быть прикреплены к внешней части транспортного средства или могут быть полностью или частично размещены в транспортном средстве. Система 306 управления полетом и/или система 302 динамического предупреждения столкновений могут представлять собой съемный и заменяемый блок или модуль, выполненный с возможностью извлечения из транспортного средства и возможностью замены в транспортном средстве, или могут быть постоянно соединены с транспортным средством или встроены в транспортное средство.
Модульный корпус может вмещать один или более компонентов модуля 300 электронных средств, системы 306 управления полетом и/или динамической системы 302 предупреждения столкновений. Модульный корпус может быть выполнен из пластика, металла, дерева, композитного материала, керамики или любого материала, подходящего для целей конкретного транспортного средства или типа транспортного средства. Модульный корпус может быть выполнен с возможностью открепления или возможностью извлечения из транспортного средства или может быть постоянно соединен с транспортным средством. Модульный корпус может быть прикреплен к транспортному средству любым способом, известным специалисту в области техники. Модульный корпус может содержать отверстия для датчиков, таких как датчики 210.
Модуль 300 электронных средств. Как описано выше, модуль 300 электронных средств может быть использован для размещения в нем авиационного электронного оборудования транспортного средства 200 (например, системы 206 управления полетом), источника питания 336, полезной нагрузки в виде датчиков, такой как полезная нагрузка 334 для получения информации, наблюдения, разведки (ISR), а также устройств связи или систем связи 338; и может быть выполнен за одно целое с каркасом 202 или может содержаться в отдельном корпусе. В конкретных аспектах модуль 300 электронных средств может дополнительно содержать динамическую систему 300 предупреждения столкновений или обладать ее функциональными возможностями.
Механизм 304 управления направлением перемещения. Механизм 304 управления направлением перемещения может быть выполнен возможностью управления летательным аппаратом 200 (автономно или под управлением человека) по навигационному пути для достижения целевого объекта, упоминаемого в данном документе. Летательный аппарат 200 может представлять собой любое транспортное средство, упоминаемое в данном документе, или любое транспортное средство, известное в области техники (или любое транспортное средство, которое станет известным в области техники). Аналогичным образом, механизм 304 управления направлением перемещения может представлять собой любое рулевое устройство, которое упомянуто в данном документе или которое известно в области техники (или которое станет известно в области техники). Механизм 304 управления направлением перемещения в целом реагирует на сигналы от системы 306 управления полетом, которая может использовать данные обратной связи и иные системы управления для точного направления летательного аппарата 200 по намеченному пути.
Как описано выше, механизм 304 управления направлением перемещения может содержать, например, рули высоты на задней части летательного аппарата 200, а также рули высоты и любые иные органы управления, подходящие для транспортных средств вертикального полета, наряду с соответствующими кабелями, исполнительными устройствами и т.п. В качестве дополнения или альтернативы механизм 304 управления направлением перемещения может содержать любой механизм для управления автономным транспортным средством. Например, что касается воздушных транспортных средств, механизм 304 управления направлением перемещения может содержать, в частности, рули поворота, рули высоты, закрылки, элероны, рули направления, пневматические тормоза и иные органы управления. Что касается иных воздушных транспортных средств, таких как вертолет, механизм 304 управления направлением перемещения может содержать заданное количество несущих винтов, которые могут представлять собой фиксированные несущие винты или управляемые несущие винты, вместе с аэродинамическими поверхностями и иными управляющими поверхностями. Механизм 304 управления направлением перемещения также может содержать составные электродвигатели, использующие управление с изменяемым вектором тяги для прямого изменения вектора тяги. Для наземных транспортных средств механизм 304 управления направлением перемещения может содержать зубчато-реечную систему, попеременно вращающиеся ободы, систему на основе циркулирующих шариков и т.п. В качестве дополнения или альтернативы механизм 304 управления направлением перемещения может содержать любые компоненты для обеспечения тяги, ускорения и торможения летательного аппарата 200 наряду с управлением направлением. Несмотря на то, что транспортные средства могут в целом использовать отдельные или встроенные компоненты для обеспечения привода и направления, все такие сочетания, которые облегчают управление перемещением транспортного средства, находятся в пределах объема механизма управления направлением перемещения, упомянутого в данном документе.
Система 302 динамического предупреждения столкновений. Модуль е-амортизатора в целом содержит схему для содействия функциональным возможностям е-амортизатора системы обхода препятствий. В действительности, система 306 управления полетом и система 302 динамического предупреждения столкновений могут взаимодействовать для обеспечения системы обхода препятствий. Как описано в данном документе, система 302 динамического предупреждения столкновений может содержать один или более датчиков 210, при этом каждый датчик 210 может иметь акустическое поле зрения (FOV). Однако, датчики 210 могут представлять собой любые из датчиков эхолокации, упоминаемых в данном документе или в ином месте. При использовании этих датчиков 210 система 302 динамического предупреждения столкновений может обнаруживать непредвиденное препятствие 122 и предавать ответные навигационные команды в систему 306 управления полетом для обхождения непредвиденных препятствий 122.
Функциональные возможности динамической системы 302 предупреждения столкновений могут быть облегчены посредством системы 306 управления полетом или независимой системы с использованием процессора 340 (или иной схожей логической схемы), памяти 342, а также одного или более датчиков 210 (например, акустических датчиков, датчиков визуального контроля или их сочетания), размещенных вдоль верхней части, нижней части и/или периметра (например, одной или более кромок) каркаса 202 летательного аппарата 200, как показано, например, на фиг. 2а и 2b. Система 302 динамического предупреждения столкновений может быть использована для уменьшения вероятности столкновения с препятствиями при любой ориентации летательного аппарата 200 и для любого положения объектов по отношению к транспортному средству. В частности, система 302 динамического предупреждения столкновений может быть обеспечена посредством множества датчиков 210, которые могут быть использованы для обнаружения различных препятствий. В целом, система 302 динамического предупреждения столкновений может устанавливать связь непосредственно с механизмом 304 управления направлением перемещения (или посредством контроллера) и/или с системой 306 управления полетом, для обеспечения, например, данных измерений от датчиков 210 и/или дифференциальных команд (например, измененную навигационную команду, такой как альтернативный навигационный путь, подавляемый навигационный сигнал или ответный маневр, который может представлять собой управляющую команду, являющуюся реакцией на данные измерений или значение глобальной оценки состояния окружающей среды и обеспечивающую возможность обхода непредвиденного препятствия 122). Следовательно, система 302 динамического предупреждения столкновений является полезной, в частности, в вылетах, предполагающих работы в непосредственной близости к препятствиям.
Конкретные преимущества и вклады динамической системы 302 предупреждения столкновений содержат: (1) независящий от датчиков способ, который может быть использован для получения глобальной оценки состояния окружающей среды на основании отдельных входных данных датчиков; (2) независящий от датчиков способ, который может быть использован для установления связи с имеющейся инфраструктурой управления транспортными средствами в независящем от транспортных средств подходе, и (3) навигационные алгоритмы, необходимые для реализации функциональных возможностей е-амортизатора. Например, система 302 динамического предупреждения столкновений может быть встроена в летательный аппарат 200 и соединена с возможностью обмена данными с механизмом 304 управления направлением перемещения, системой 306 управления полетом, оптической системой, датчиками 210 или их сочетанием.
Система 302 динамического предупреждения столкновений также имеет преимущество, заключающееся в том, что она использует относительно простой конечный автомат для активации, масштабирования или деактивации влияния каждого компонента, например входные данные оператора, пропорционально-интегрально-дифференциальное (PID) регулирование в зависимости от расстояния, команды автопилота и т.п., в ответ на расстояние до объекта, что уменьшает риск ошибки. Кроме того, полная оценка конечного автомата может быть объединена по меньшей мере с четырьмя датчиками эхолокации. Однако в конкретных вариантах реализации (например, в случае, когда необходимо отслеживать только одно направление) система обхода препятствий может быть выполнена с использованием только одного датчика, размещенного на переднем конце транспортного средства. Еще одно преимущество динамической системы 302 предупреждения столкновений, описанной в данном документе, заключается в том, что система 302 динамического предупреждения столкновений не требует наличия любых взаимодействующих целевых датчиков. То есть нет необходимости размещать соответствующие датчики на препятствиях, что значительно увеличивает полезность динамической системы 302 предупреждения столкновений. Кроме того, система 302 динамического предупреждения столкновений не требует информации о воздушном транспортном средстве или наличие алгоритмов предупреждения столкновений.
Возможно множество различных конфигураций, при этом в качестве дополнения или альтернативы система 302 динамического предупреждения столкновений может быть встроена в транспортное средство 300, систему 306 управления полетом или может содержать любые компоненты, описанные в данном документе. Для этого, как описано в отношении фиг. 2а и 2b, датчики 210 могут быть встроены в обшивку транспортного средства 300. Встраивание датчиков 210 обеспечивает ряд преимуществ. Например, встраивание датчиков 210 обеспечивает компактность корпуса (например, по размеру и весу), а также одновременно с этим позволяет предотвращать помехи в результате взаимодействия датчиков эхолокации (переходные помехи), а также электромагнитные помехи (EMI) и акустический шум от винтового движителя. Кроме того, обшивка летательного аппарата 200 обеспечивает возможность точного расположения, низкое лобовое сопротивление и возможность простой замены датчиков 210 (например, если датчик оказывается поврежден или необходимо заменить или модернизировать этот датчик). Например, в обшивке транспортного средства может быть выполнена выемка для одного или более датчиков, что позволяет подавлять нежелательное лобовое сопротивление. Датчик может быть дополнительно покрыт защитным покрытием. Однако, защитное покрытие не должно препятствовать датчикам осуществлять их функциональные возможности и/или безотказно работать. Например, при использовании акустических датчиков защитное покрытие должно быть выполнено акустически невидимым (например, ткань или отражатель, имеющий совсем маленькие отверстия, расположенные на одинаковом расстоянии друг от друга и покрытые тонкой эластичной мембраной). Один из примеров акустически невидимого материала отражателя описан Джонгом Джин Паркером (Jong Jin Park) и др. в статье «Огромная акустическая концентрация благодаря необычному пропусканию у метаматериалов с нулевой массой» (Giant Acoustic Concentration by Extra или dinary Transmission in Zero-Mass Metamaterials), источник «Phys. Rev. Lett. 110», 244302 (опубликованной 13 июня 2013 года). Аналогичным образом, при использовании датчиков визуального контроля защитное покрытие должно быть выполнено прозрачным или проницаемым.
Несмотря на то, что имеющаяся система 302 динамического предупреждения столкновений описана как использующая датчики эхолокации в качестве датчиков 210, система 302 динамического предупреждения столкновений может использовать результаты измерений, принятые от любого датчика (независимо от того, представляет ли этот датчик собой датчики эхолокации или же имеет другой тип, описанный в данном документе, без ограничения этими вариантами реализации) и объединяет принятые данные для получения глобальной оценки состояния окружающей среды. На основании этой глобальной оценки состояния окружающей среды интересуемые признаки для алгоритмов могут быть извлечены и сохранены в целевой базе данных. Глобальная оценка состояния окружающей среды может представлять собой отдельную сумму того, что датчики регистрируют вокруг летательного аппарата. Например, если имеются многочисленные датчики, которые обеспечивают возможность измерения одного и того же показателя (например, дальности до препятствия), то эта глобальная оценка объединяет эти состояния. Имеются многочисленные датчики, которые обеспечивают многочисленные различные показания (например, дальность до препятствия, а также скорость и/или скорость сближения с препятствием). При описании этой глобальной оценки состояния окружающей среды как отдельной суммы данных измерений, как описано выше, она служит как одиночный интерфейс, доступный банку алгоритмов.
Эта целевая база данных может выполнять функцию общего интерфейса для любого алгоритма, который может быть использован динамической системой 302 предупреждения столкновений или другой системой навигации автономного транспортного средства или обхождения препятствий. В случае динамической системы 302 предупреждения столкновений объекты, которые определяют для определения местоположения угрозы столкновения, подают в алгоритмы, специфические для динамической системы 302 предупреждения столкновений.
Как описано выше, система 302 динамического предупреждения столкновений может быть встроена в летательный аппарат 200 посредством интерфейса управления полетом транспортного средства из системы 306 управления полетом без изменения существующих систем на летательном аппарате 200 и без необходимости в наличии знаний касательно автопилота транспортного средства (или особенностей управления, осуществляемого человеком). Например, встроенное логическое устройство или процессор 340, такой как микропроцессор «Arduino®», может (1) прерывать первоначальные навигационные команды (например, полетные команды пилота или автопилота), (2) осуществлять подавление в соответствии с заданным алгоритмом е-амортизатор а и (3) подавать новые или измененные навигационные команды (например, подавленные команды, сгенерированные системой динамического предупреждения столкновений) в систему 306 транспортного средства для управления полетом (например, автопилот) или механизм 304 управления направлением перемещения в качестве замены или замещения навигационных команд. Кроме того, система 302 динамического предупреждения столкновений может перехватывать управляющие сигналы (например, навигационные команды) от автопилота в генераторы 206 тяги (например, электродвигатель посредством сигналов широтно-импульсной модуляции (PWM)) и модифицировать эти сигналы перед их отправкой в систему 306 управления полетом и/или генераторы 206 тяги (например, двигатели, турбины и т.п.). Преимущество раскрытой динамической системы 302 предупреждения столкновений заключается в том, что она решает задачу обхода препятствий без необходимости внесения изменений в летательный аппарат 200, то есть система 302 динамического предупреждения столкновений является независимой от транспортного средства. В конкретных аспектах вследствие того, что существенные задержки в системе могут привести к нежелательной работе летательного аппарата 200, необходимо постоянно отслеживать скорость исполнения программного обеспечения, реализованного на устройстве, встроенном в динамическую систему 302 предупреждения столкновений.
При использовании глобальной оценки состояния окружающей среды и настроенного интерфейса для управления транспортным средства в рабочем положении система 302 динамического предупреждения столкновений может фокусироваться на навигационные команды (например, команды пилота или автопилота), что могло бы вызвать падение транспортного средства на объект. Пропорционально-интегрально-дифференциальный контроллер расстояния также может быть выполнен с возможностью сохранения местоположения и возможностью отклонения нежелательных входных данных оператора (например, обхода препятствий). Входные данные пилота (например, навигационные команды) могут быть отклонены или изменены с использованием фильтра верхних частот, фильтра нижних частот и полосового фильтра, подходов прямой связи и интеграторов с высоким коэффициентом усиления. Кроме того, технологии задания коэффициента усилия реализуют для обеспечения возможности управления надежностью. Например, в случае, в котором транспортное средство достигает непредвиденных препятствий 122 вследствие входных данных управления оператором транспортного средства, система динамического предупреждения столкновений может уменьшить эффективность этих входных данных управления как функцию расстояния до объекта. Если транспортное средство продолжает достигать непредвиденные препятствия 122, система динамического предупреждения столкновений в конечном счете полностью подавляет все входные данные управления в направлении объекта и/или активно уменьшает скорость сближения с объектом. Аналогичным образом, если транспортное средство перемещают к объекту вследствие условий окружающей среды (например, вследствие ветра или порывов ветра) для создания опасности столкновения, система динамического предупреждения столкновений обеспечивает навигационные команды для обеспечения того, что местоположение транспортного средства не упадет до уровня менее заданного безопасного расстояния от объекта. Подавление может быть отрегулировано таким образом, что система динамического предупреждения столкновений уменьшает эффективность этих входных данных управления (например, навигационных команд) как функцию расстояния до объекта. Например, может быть использована обратная функция расстояние-подавление, в результате чего по мере уменьшения расстояния между транспортным средством и объектом подавление входных данных управления увеличивается таким образом, что входные данные управления эффективно уменьшаются, не учитываются или отменяются. Кроме того, в конкретных ситуациях система динамического предупреждения столкновений может быть введена в действие для сохранения транспортного средства на фиксированном расстоянии от объекта с тем, чтобы позволить систематически осматривать этот объект на ближнем расстоянии без опасности воздействия на непредвиденные препятствия 122. Возможность двухрежимной работы динамической системы 302 предупреждения столкновений, которая имеет возможность сохранять расстояние относительно объекта или осуществлять обход препятствий во время полета, делает динамическую систему 302 предупреждения столкновений полезной для широкого множества операторов. То есть, сохранение расстояния между транспортным средством и объектом является предпочтительным для сбора данных, при этом функция обхода препятствий содействует малоопытным пилотам.
Система 302 динамического предупреждения столкновений может дополнительно иметь признак типа задействована/нейтрализована. Признак типа задействована/нейтрализована может быть использован, например, для предотвращения выдачи контроллером е-амортизатор а ошибочного сигнала о столкновении после обнаружения земли во время взлета или посадки. В действительности, меры по обеспечению безопасности по задействованию и нейтрализации динамической системы 302 предупреждения столкновений на различных фазах полета, взлета и посадки дополнительно увеличивают надежность и безопасность летательного аппарата 200. Например, система 302 динамического предупреждения столкновений может быть приведена в действие вручную посредством контроллера (например, пилотом, управляющим транспортным средством) или автоматически задействована/нейтрализована в зависимости от расстояния, местоположения, высота, времени полета и т.п. транспортного средства. В конкретных аспектах система 302 динамического предупреждения столкновений может быть выполнена с возможностью переключения между одним из множества режимов работы. Необходимый режим работы может быть выбран с использованием, например, физического переключателя, размещенного на летательном транспортном средстве, удаленно посредством интерфейса для взаимодействия с оператором и/или устройством (например, посредством удаленного контроллера/наземного пункта) или т.п. Примерами режимов работы являются, без ограничения, режим отключения (то есть, система выключена), режим точности, рабочий режим и т.п. Например, в режиме точности система 302 динамического предупреждения столкновений может позволять признаки, такие как автоматический взлет, отклонение ошибочных входных данных оператора, обход препятствий, точное управление летательным аппаратом путем регулируемого управления входными данными и/или преобразования ответов летательного аппарата и т.п. Кроме того, режим точности может быть задан таким образом, что он позволяет беспилотному летательному аппарату (UAV) приближаться к препятствию на более близкое расстояние, чем при рабочем режиме (например, приблизительно 1-10 футов (30,48 см 304,8 см), более предпочтительно приблизительно 3-7 футов (91,44 см 213,36 см) или приблизительно 4,5 фута (137,16 см)). В рабочем режиме система 302 динамического предупреждения столкновений может обеспечивать те же самые преимущества, что и в режиме точности, однако он может быть оптимизирован для более быстрых режимом полета. Например, в рабочем режиме летательный аппарат может осуществлять обход препятствий на большем расстоянии, чем в рабочем режиме. Кроме того, маневр для предотвращения столкновения может быть более агрессивным по сравнению с маневром в режиме точности для обеспечения защиты от более высоких скоростей работы.
Система 306 управления полетом. Система 306 управления полетом может определить один или более навигационных путей для летательного аппарата 200 для достижения необходимого места на основании сигналов, принятых от компонентов навигационной системы. Система 306 управления полетом может вычислять, генерировать и направлять навигационные команды (например, сигналы данных) в механизм 304 управления направлением перемещения для направления летательного аппарата 200 по навигационному пути к необходимому месту. Система 306 управления полетом может быть размещена полностью или частично внутри отдельного корпуса, внутри каркаса 202 или их некоторого сочетания. Система 306 управления полетом может дополнительно содержать любые из компонентов динамической системы 302 предупреждения столкновений или описанной системы 306 управления полетом, например, со ссылкой на фиг. 3. В действительности, система 306 управления полетом и система 302 динамического предупреждения столкновений в целом выполнены с возможностью направления одного или более механизмов 304 управления направлением перемещения в летательном аппарате 200 или с возможностью управления одним или более механизмов 304 управления направлением перемещения в летательном аппарате 200. Система 306 управления полетом может быть соединена с возможностью обмена данными с летательным аппаратом 200 и удаленным местом и может быть выполнена с возможностью отправки, посредством устройства 338 связи, сигналов в летательный аппарат 200 и удаленное место и с возможностью приема сигналов от летательного аппарата 200 и удаленного места. Устройство 338 связи может представлять собой, например, беспроводной приемо-передатчик и антенну.
Система 306 управления полетом в целом может содержать систему 308 управления направлением перемещения, систему 310 карт, систему 312 спутниковой навигации, процессор 314, гироскоп 316, контроллер 318, акселерометр 320 и/или память 330. Система 306 управления полетом также может содержать вышеописанные компоненты, размещенные в корпусе для модуля 300 электронных средств, а также иные датчики 332, такие как любые иные обычно пилотажно-навигационные приборы, датчики, обрабатывающие схемы, схемы связи, оптическую систему, содержащую камеры, и т.п., необходимые или полезные для обеспечения работы беспилотного летательного транспортного средства или иного автономного или вручную пилотируемого транспортного средства. Один или более компонентов системы 306 управления полетом могут быть размещены в корпусе для модуля 300 электронных средств.
Система 306 управления полетом может быть соединена с возможностью обмена данными с одним или более механизмами 304 управления направлением перемещения и/или динамической системой 302 предупреждения столкновений. Например, система 308 управления направлением перемещения может быть выполнена с возможностью приема сигналов от системы 306 управления полетом (или динамической системы 302 предупреждения столкновений) и возможностью выдачи подходящих управляющих сигналов в механизм 304 управления направлением перемещения транспортного средства для направления летательного аппарата 200 по намеченному пути.
Система 310 карт может представлять собой часть системы управления полетом на основе карт, которая обеспечивает информацию о местоположении природных и рукотворных особенностей в пределах заданной области. Эта информация может содержать информацию на любом уровне детализации, в том числе, например, топологические карты, общие двумерные карты, указывающие на дороги, здания, реки и т.п., или подробные трехмерные данные, характеризующие высоту и форму различных природных и рукотворных препятствий, таких как деревья, скульптуры, инженерные коммуникации, здания и т.п. В одном из аспектов система 310 карт может взаимодействовать с оптической системой для визуальной проверки окружающей обстановки или система 310 карт может взаимодействовать с системой 312 спутниковой навигации для обеспечения информации о различных препятствиях в окружающей среде для определения пути следования или т.п.. В одном из аспектов система 310 карт может обеспечивать дополнительное навигационное вспомогательное средство в окружающей среде с блокированием сигнала глобальной навигационной спутниковой системы (GPS) или подавлением сигнала глобальной навигационной спутниковой системы (GPS). В случае, когда сигнал глобальной навигационной спутниковой системы (GPS) частично или полностью отсутствует, система 310 карт может взаимодействовать с иными датчиками 332, такими как оптические датчики, инерциальные датчики и т.п. для обеспечения информации о местоположении до тех пор, пока сигнал глобальной навигационной спутниковой системы (GPS) не будет восстановлен.
В частности, система 310 карт может устанавливать связь с другими компонентами системы 306 управления полетом для поддержки навигации транспортного средства, упомянутыми в данном документе. Несмотря на то, что система 310 карт может включать обеспечение информации о картах для вычисления маршрутов, она также может включать независимые навигационное возможности. Например, система 310 карт может обеспечивать навигационную систему для навигации на основе карт, которая хранит карту рабочей окружающей среды, содержащую один или более объектов. Навигационная система для навигации на основе карт может быть соединена с камерами и может быть выполнена с возможностью определения местоположения транспортного средства путем сравнения сохраненных объектов с видимой окружающей средой, что позволяет получать данные о местоположении при отсутствии данных глобальной навигационной спутниковой системы (GPS) или иной информации о местоположении.
Система 312 спутниковой навигации может представлять собой часть глобальной навигационной спутниковой системы, выполненную с возможностью определения местоположения модуля 300 электронных средств или летательного аппарата 200. Система 312 спутниковой навигации может содержать любую технологию на основе глобальной навигационной спутниковой системы (GPS), которая известна в области техники или которая станет известной в области техники, в том числе обычные спутниковые системы, а также иные системы, использующие общедоступные или частные маяки, сигналы местоположения и т.п. Система 312 спутниковой навигации может содержать один или более приемопередатчиков, которые получают путем регистрации данные, используемые при вычислении местоположения. Система 312 спутниковой навигации может взаимодействовать с другими компонентами системы 306 управления полетом для управления работой летательного аппарата 200 и навигации транспортного средства по намеченному пути.
Гироскоп 316 может представлять собой устройство, выполненное с возможностью обнаружения поворота модуля 300 электронных средств или летательного аппарата 200, с которым соединен модуль 300 электронных средств. Гироскоп 316 может быть выполнен за одно целое с летательным аппаратом 200 или может быть размещен внутри или снаружи корпуса для модуля 300 электронных средств. Гироскоп 316 может содержать любой гироскоп или его варианты (например, гиростабилизатор, микроэлектромеханические системы (MEMS), волоконно-оптический гироскоп, гироскоп с колебательным контуром, гироскоп с динамической настройкой и т.п.), который известен в области техники или который станет известным в области техники. Гироскоп 316 может взаимодействовать с другими компонентами системы 306 управления полетом для управления работой летательного аппарата 200 и навигации транспортного средства по намеченному пути.
Акселерометр 320 может представлять собой устройство, выполненное с возможностью обнаружения линейного перемещения модуля 300 электронных средств или летательного аппарата 200. Акселерометр 320 может быть выполнен за одно целое с летательным аппаратом 200 или может быть размещен внутри или снаружи корпуса для модуля 300 электронных средств. Акселерометр 320 может содержать любой акселерометр, который известен в области техники (например, емкостной акселерометр, резистивный акселерометр, акселерометр с подпружиненным подвесом, акселерометр на основе ответного сигнала постоянного тока (DC), акселерометр на основе электромеханического сервопривода, лазерный акселерометр, акселерометр на основе магнитной индукции, пьезоэлектрический акселерометр, оптический акселерометр, низкочастотный акселерометр, акселерометр на основе интегрирующего маятникового гироскопа, резонансный акселерометр, акселерометр на основе тензодатчика, акселерометр на основе поверхностных акустических волн, акселерометр на основе микроэлектромеханических систем (MEMS), термический акселерометр, акселерометр на основе вакуумных диодов и т.п.) или который станет известным в области техники. Акселерометр 320 может взаимодействовать с другими компонентами системы 306 управления полетом для управления работой летательного аппарата 200 и навигации транспортного средства по намеченному пути.
Кроме того, аналогичным образом могут быть использованы и иные датчики 332 (или системы датчиков) или датчики 210. Например, летательный аппарат 200 (или система 306 управления полетом, система 302 динамического предупреждения столкновений или модуль 300 электронных средств в транспортном средстве) может использовать инфракрасные датчики, радиолокационные датчики, лазерные датчики для обнаружения и измерения дальности и т.п. Любой из вышеописанных акселерометров может быть использован отдельно или в сочетании с другими системами и датчиками, описанными в данном документе, для улучшения навигации автономного транспортного средства. Процессор 314 может быть соединен с возможностью обмена данными с контроллером 318, летательным аппаратом 200, системой 306 управления полетом, механизмом 304 управления направлением перемещения и различными иными компонентами, системами и подсистемами, описанными в данном документе. Процессор 314 может представлять собой внутренний процессор летательного аппарата 200 или системы 306 управления полетом, дополнительный процессор в модуле 300 электронных средств для поддержки различных встроенных навигационных функций, описанных в данном документе, процессор настольного компьютера или т.п., локально или удаленно соединенный с летательным аппаратом 200, а также системой 306 управления полетом, сервер или иной процессор, соединенный с летательным аппаратом 200 и системой 306 управления полетом посредством сети передачи данных, или иной процессор или обрабатывающую схему. Процессор 314 может быть в целом выполнен с возможностью управления работой летательного аппарата 200 или системы 306 управления полетом и возможностью обработки различных данных и вычисления функции для поддержки навигации. Процессор 314 может содержать заданное количество различных процессоров, взаимодействующих друг с другом для выполнения этапов, описанных в данном документе, например в случае, в котором внутренний процессор летательного аппарата 200 управляет работой летательного аппарата 200, а процессор в корпусе предварительно обрабатывает оптические данные и данные эхолокации.
Процессор 314 может быть выполнен с возможностью определения или возможностью изменения навигационного пути для летательного аппарата 200 в заданное место на основании множества различных входных данных, содержащих, например, информацию о местоположении, информацию о перемещении, данные динамической системы 302 предупреждения столкновений и т.п., которые могут быть по-разному основаны на данных от системы 312 спутниковой навигации, системы 310 карт, гироскопа 316, акселерометра 320, на других входных навигационных данных, а также на данных оптической системы и системы эхолокации, которые могут обеспечивать информацию о препятствиях в окружающей среде вокруг летательного аппарата 200. Первоначальный путь может быть определен, например, исключительно на основе информации о местоположении, предоставленной системой 312 спутниковой навигации, с обеспечением регулирования во время полета на основании перемещений, обнаруженных гироскопом 316, акселерометром 320 и т.п. Процессор 314 также может быть выполнен с возможностью использования оптической навигационной системы для навигации на основе карт, при этом процессор выполнен с возможностью идентификации видимого препятствия в пределах акустического поля зрения (FOV) оптической системы; например с использованием оптического потока для обработки совокупности изображений и для первоочередного использования системы 312 спутниковой навигации для навигации летательного аппарата 200 вокруг видимого препятствия к заданному месту. Процессор 314 может быть дополнительно выполнен с возможностью идентификации препятствия в пределах акустического поля зрения (FOV) динамической системы 302 предупреждения столкновений, обычно в пределах линии полета транспортного средства, и может быть дополнительно выполнен с возможностью первоочередного использования системы 312 спутниковой навигации и оптической навигационной системы для осуществления ответного маневра, который направляет летательный аппарат 200 вокруг препятствия и возвращает этот летательный аппарат 200 на предыдущий курс к заданному месту.
Контроллер 318 может быть выполнен с возможностью управления компонентами летательного аппарата 200 и системы 306 управления полетом, такими как механизм 304 управления направлением перемещения 304. Контроллер 318 может быть электрически или иным способом соединен с возможностью обмена данными с процессором 314, летательным аппаратом 200, системой 306 управления полетом, механизмом 304 управления направлением перемещения и различными иными компонентами устройства и системы, описанными в данном документе. Контроллер 318 может содержать любое сочетание программного обеспечения и/или обрабатывающей схемы, подходящих для управления различными компонентами летательного аппарата 200 и системами 306 управления полетом, описанными в данном документе, в том числе, без ограничения, микропроцессорами, микроконтроллерами, специальными интегральными схемами, программируемыми вентильными матрицами и любыми иными цифровыми и/или аналоговыми компонентами, а также сочетаниями вышеописанных компонентов, наряду с входами и выходами для передачи управляющих сигналов, приводных сигналов, сигналов подачи энергии питания, сигналов датчиков и т.п. В одном из аспектов это может содержать схему, физически связанную непосредственно с летательным аппаратом 200 и системой 306 управления полетом, например бортовой процессор. Еще в одном аспекте такая схема может представлять собой процессор, такой как описанный в данном документе процессор 314, который может быть связан с персональным компьютером или иным вычислительным устройством, соединенным с летательным аппаратом 200 и системой 306 управления полетом посредством, например, проводного или беспроводного соединения. Аналогичным образом, различные функции, описанные в данном документе, могут быть распределены между бортовым процессором для летательного аппарата 200, системой 306 управления полетом и отдельным компьютером. Все такие вычислительные устройства и окружающие среды находятся в пределах значения термина «контроллер» или «процессор», используемых в данном документе, если только явно не указано иное значение или иное значение явным образом не следует из контекста.
Память 330 может содержать локальную память или удаленное запоминающее устройство, которое хранит лог-файл с данными для системы 306 управления полетом, в том числе, без ограничения, местоположение обнаруженных препятствий, карты, изображения, ориентации, значения скорости, навигационные пути, спецификации по рулевому управлению, GPS-координаты, показания датчиков и т.п. В качестве дополнения или альтернативы память 322 может хранить лог-файл с данными, собранными из заданного количества навигаций конкретного транспортного средства или данными, собранными из заданного количества навигаций различных транспортных средств. Кроме того, в качестве дополнения или альтернативы память 322 может хранить данные датчиков от оптической системы и динамической системы 302 предупреждения столкновений, соответствующие метаданные и т.п. К данным, сохраненным в памяти 330, могут получать доступ процессор 314, контроллер 318, удаленный обрабатывающий источник и т.п.
На фиг. 4 показана блок-схема способа 400 навигации транспортного средства с использованием системы динамического предупреждения столкновений. Система динамического предупреждения столкновений включается или приводится в действие на этапе 402. После приведения в действие система динамического предупреждения столкновений отслеживает окружающую среду (например, в каждом направлении свободы) с использованием одного или более датчиков. Как описано выше, датчики могут представлять собой, например, датчики эхолокации. Как показано на этапе 404, способ 400 может включать обнаружение непредвиденного препятствия 122.
Как показано на этапе 404, способ 400 может включать обнаружение препятствия с использованием одного или более датчиков эхолокации (или иного подходящего датчика). Этап 404 может включать выдачу акустических сигналов, регистрацию эхо-сигналов для этих акустических сигналов и использование зарегистрированных эхо-сигналов для определения размера и местоположения препятствий. В целом, такое препятствие может представлять собой любое препятствие, которое может быть зарегистрировано посредством звукового потока и которое блокирует, частично блокирует, скрывает, заграждает и т.п. навигационный путь транспортного средства от местоположения до целевого объекта. Препятствие может представлять собой любое физическое препятствие, такое как здание, дерево, линия электропередач, гора и т.п. В частности, первое препятствие может представлять собой любое место или любую точку пути, которые транспортное средство должно обойти.
Как показано на этапе 406, способ 400 может включать определение, подавлять ли навигационные команды. Решение касательно того, подавлять ли навигационные команды на этапе 412 или вычислять ответный маневр на этапе 408, может быть основано на расстоянии до препятствий. Например, если расстояние до препятствия соответствует или превышает заданное пороговое значение для расстояния, то процессор системы динамического предупреждения столкновений может подавить навигационные команды на этапе 412. Если расстояние до препятствия меньше заданного порогового значения для расстояния, что соответствует наступающему столкновению, то процессор системы динамического предупреждения столкновений может вычислить ответный маневр на этапе 408.
Как показано на этапе 412, способ 400 может включать подавление навигационных команд. Например, в случае, в котором транспортное средство достигает препятствия вследствие входных данных управления оператором транспортного средства или автопилотом, система динамического предупреждения столкновений может регулировать входные данные управления на основании расстояния до объекта. Если транспортное средство продолжает сближаться с объектами, то система динамического предупреждения столкновений может в конечном итоге полностью отклонить все входные данные управления в направлении объекта и/или интенсивно снижать скорость сближения с объектом.
Как показано на этапе 414, способ 400 может включать вычисление ответного маневра, который позволит осуществить обход препятствия. В одном из аспектов ответный маневр может представлять собой заданный ответный маневр, который обеспечивает временное отклонение от уточненного курса и незамедлительный возврат на этот уточненный курс после осуществления ответного маневра. Еще в одном аспекте это может включать выбор из числа некоторого количества заданных ответных маневров согласно информации о препятствии или динамическое создание ответного маневра в соответствии с ответом от системы эхолокации. При необходимости ответный маневр может быть дополнительно приспособлен к другим данным, таким как данные глобальной навигационной спутниковой системы (GPS), оптические данные или иные данные датчиков для улучшения реагирования на окружение обнаруженного препятствия. Однако после вычисления инструкции для ответного маневра могут быть переданы в систему управления направлением перемещения для транспортного средства для их соответствующего исполнения.
Как показано на этапе 410, способ 400 может включать определение, находится ли препятствие за пределами дальности действия, как результат подавления на этапе 412 или ответного маневра на этапе 414. Если препятствие находится за пределами дальности действия, способ 400 может завершаться на этапе 416 или в качестве альтернативы повторно начинаться на этапе 402 для обхода будущих препятствий. Если препятствие все еще находится в пределах дальности действия, способ 400 может вернуться к этапу 404.
Радиолокационный (RADAR) модуль 500 управления полетом и/или предупреждения столкновений (RFCA). Система 302 динамического предупреждения столкновений может быть встроена как радиолокационный модуль 500 управления полетом и/или предупреждения столкновений (RFCA), который использует радиолокацию как один из датчиков 210, таких как радиолокационный микродатчик с формирователем прямоугольных пучков. Как показано на фиг. 5а-5с, модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может содержать большую интегральную схему 502 (RFLSI), микроконтроллер 508 (MCU), соединенный с одним или более запоминающими устройствами 504 (например, оперативным запоминающим устройством (RAM) и постоянным запоминающим устройством (ROM)) и одним или более датчиков 210, кабельный входной разъем 506, такой как активный USB-коннектор, и интерфейсный соединитель 510 для соединения с летательным аппаратом 200. Модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может дополнительно содержать различные электронные компоненты 512 для обработки сигналов и регулирования напряжения (например, конденсаторы, индуктивности, стабилизаторы напряжения (LDO) и т.п.). Один из датчиков 210 (например, радиолокационный микродатчик с формирователем прямоугольных пучков) может быть размещен на той же самой печатной плате 514 (РСВ) или может быть расположен удаленно и соединен с печатной платой 514 (РСВ) посредством электронных проводников или беспроводного приемопередатчика.
Интерфейсный соединитель 510 может подавать энергию питания и обеспечивать функциональные возможности универсального асинхронного приемника/передатчика (UART) между модулем 500 управления полетом и/или предупреждения столкновений (RFCA) и летательным аппаратом 200. Модуль 500 управления полетом и/или предупреждения столкновений (RFCA) предпочтительно выполнен компактным и, вследствие того, что он отчасти не зависит от транспортного средства и датчиков, выполнен как модификация, которая соединена с имеющейся системой 306 управления полетом и/или механизмом или механизмами 304 управления направлением перемещения в летательном аппарате 200 посредством интерфейсного соединителя 510. При работе датчики 210 выдают входные данные результатов измерений в микроконтроллер 508, который выполнен с возможностью запуска одной или более программ (например, навигации, поддержания высоты, содействия посадке и программного обеспечения/функции по защите от столкновения). Микроконтроллер 508 выдает команды на систему 306 управления полетом летательного аппарата 200. Преимущество модуля 500 управления полетом и/или предупреждения столкновений (RFCA) заключается в том, что он обеспечивает надежную и гибкую архитектуру, которая может работать как один модуль для получения первоначальных данных (например, от одного или более датчиков 210), а также алгоритмы обработки и регистрации сигналов. Обмен данными между модулем 500 управления полетом и/или предупреждения столкновений (RFCA) и летательным аппаратом 200 может быть облегчен благодаря одному двустороннему каналу связи, который может быть настроен посредством, например, интерфейса (API) прикладной программы «MAVLink».
Модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может быть установлен на летательном аппарате 200 в обращенной книзу конфигурации, обращенной вперед конфигурации или их сочетании. В обращенной книзу конфигурации, как показано на фиг. 2с, модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может обеспечивать функции по поддержанию высоты и содействию посадке (например, посредством модуля содействия посадке). Например, модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может управлять, посредством команд, летательным аппаратом 200 с использованием функции поддержания высоты для сохранения заданной высоты до обнаруженной нижерасположенной преграды (по отношению к поверхности земли) или при осуществлении функции содействия посадке может управлять, посредством команд, летательным аппаратом 200 с обеспечением осуществления посадочного маневра для обхода нижерасположенной обнаруженной преграды. В обращенной вперед конфигурации, как показано на фиг. 2d, модуль 500 управления полетом и/или предупреждения столкновений (RFCA) обеспечивает защиту от столкновений путем управления, посредством команд, маневрами при полете в направлении вперед для предупреждения столкновения с обнаруженной преградой (например, выполняет функцию тормоза). Предварительные испытания выявили то, что модуль 500 управления полетом и/или предупреждения столкновений (RFCA) обеспечивает дальность действия 1-10 метров, скорость до 5 м/с, скорость обновления при 40 Гц, акустические поля зрения (FOV) в 70° (в обращенной вперед конфигурации) и в 60° (в обращенной книзу конфигурации), разрешение в 8 см для обнаруженных объектов, представляющих собой наиболее близкий объект, независимо от того, является ли он неподвижным или подвижным.
Модуль 500 управления полетом и/или предупреждения столкновений (RFCA) предпочтительно выполнен компактным и легким, что минимизирует нагрузку и наложение на летательный аппарат 200. Например, модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может иметь длину (L) между 10 мм и 50 мм, более предпочтительно между 20 мм и 40 мм, наиболее предпочтительно приблизительно 30 мм, а также ширину (W), которая может составлять между 10 мм и 40 мм, более предпочтительно между 15 мм и 30 мм, а наиболее предпочтительно приблизительно 20 мм, и может иметь высоту (Н) между 1 мм и 10 мм, более предпочтительно между 3 мм и 7 мм, а наиболее предпочтительно приблизительно 5 мм. Модуль 500 управления полетом и/или предупреждения столкновений (RFCA) с размерами, например, 20×30×5 мм имеет вес менее 25 грамм и имеет энергопотребление менее 1 Ватта (В).
Функция трехзонного предупреждения столкновений. В конкретных аспектах процессор 340 динамической системы 302 предупреждения столкновений может исполнять функцию трехзонного предупреждения столкновений с возможностью блокировки пилота. Однако в конкретных аспектах может быть обеспечен отдельный модуль, содержащий схему для оказания содействия функции трехзонного предупреждения столкновений. Функция трехзонного предупреждения столкновений обеспечивает независимую методику для датчиков и летательного аппарата для предотвращения стремительного столкновения летательного аппарата 200 с объектами в пределах своей окружающей среды/дальности действия. Другими словами, функция трехзонного предупреждения столкновений обеспечивает функциональную возможность по «обнаружению и предотвращению» и/или функциональную возможность по «измерению и предотвращению» для летательного аппарата 200, который является чувствительным к навигации летательного аппарата, независимо от того, является ли полет автономным или пилотируемым пилотом.
Преимущество летательного аппарата 200, использующего функцию трехзонного предупреждения столкновений (например, посредством алгоритма 600 трехзонного предупреждения столкновений), заключается в способности использовать низкозатратные и приблизительные результаты измерения дальности для обеспечения эффективной системы защиты от столкновений для активно пилотируемого летательного аппарата 100. Функция трехзонного предупреждения столкновений также способна масштабировать входные данные датчиков от одного или более датчиков 210, при этом датчик и летательный аппарат остаются независимыми в смысле их конструктивного исполнения, что позволяет использовать функцию трехзонного предупреждения столкновений, которая должна быть использована по существу всем летательный аппаратом.
Иллюстративная функция трехзонного предупреждения столкновений может быть облегчена с использованием алгоритма 600 трехзонного предупреждения столкновений, показанного на фиг. 6а. Как показано, входные данные для алгоритма 600 трехзонного предупреждения столкновений от одного или более датчиков 210, чело века-пилота или автопилота принимают на этапе 602. Входные данные могут содержать оценку скорости сближения, оценку дальности и входной поток команд пилота (то есть, команды пилота), который может представлять собой поток команд оператора, являющегося человеком, или автопилота. При использовании этих трех входных данных алгоритм 600 трехзонного предупреждения столкновений на этапе 604 определяет зону из множества зон в физическом пространстве, в котором в текущий момент времени находится цель. Как описано выше, зона представляет собой область пространства или ее часть, то есть обычно задана полем зрения датчиков 210 между транспортным средством 200 и рабочей дальностью действия датчиков 210 (например, максимальной рабочей дальностью действия). В некоторых вариантах реализации три зоны идентифицируют как: входящая зона 622, критическая зона 620 или паническая зона 618. Все три зоны могут быть идентифицированы путем использования, например, формул, обеспеченных на этапе 606.
В других вариантах реализации, как показано на фиг. 6b, три зоны могут быть идентифицированы на основании пороговых значений дальности действия датчиков (например, первом и втором пороговых значениях 624, 626 для расстояния), определенных оператором, который задает граничные значения расстояния. Как показано, первая зона (входящая зона 622) охватывает область между максимальной дальностью действия датчика и входным пороговым значением 626 (например, первым пороговым значением / расстоянием), вторая зона (критическая зона) охватывает область между входным пороговым значением 626 и паническим пороговым значением 624; а третья зона (паническая зона 618) охватывает область между паническим пороговым значением 624 (например, вторым пороговым значением / расстоянием) и самим транспортным средством. Следует учитывать, что максимальная дальность действия датчика может относиться к максимальному расстоянию, на котором заданный датчик способен обнаруживать объекты/цели с подходящей достоверностью. Как показано, форма каждой зоны может быть задана как функция формы поля зрения (FOV). Пороговые значения 624, 626 для дальности действия датчика могут быть приняты от оператора летательным аппаратом 200. Например, если цель расположена во входящей или критической зоне, кривую пределов скорости вычисляют в диапазоне, в частности в области значений скорости сближения, с использованием пороговых значений дальности действия и пределов относительной скорости в зоне, заданных оператором. На этапе 606 на основании результатов этих определений алгоритм 600 трехзонного предупреждения столкновений задает входные данные управления (например, Rateset и/или Kp). В дальнейшем алгоритм 600 трехзонного предупреждения столкновений вводит входные данные управления Rateset и/или Kp с этапа 606 в пропорционально-дифференциальный контроллер на этапах 608 для выдачи данных управления. На этапе 610 алгоритм 600 трехзонного предупреждения столкновений преобразовывает данные управления (то есть, дальность действия от -1 до 1, безразмерная величина) с этапа 608 в поток команд управления (то есть, во входные данные команд пилота с этапа 602, такие как длительность импульса при широтно-импульсной модуляции (PWM), дальность действия от 1000 до 2000). На этапе 612 алгоритм 600 трехзонного предупреждения столкновений сравнивает поток команд управления с этапа 610 с потоком команд пилота (то есть, команда пилота входной поток команд пилота из этапа 602) для определения, является ли безопасной команда пилота. Команда пилота считается небезопасной, если эта команда может быть интерпретирована как пытающаяся уменьшить дальность от транспортного средства до цели или увеличить скорость транспортного средства выше предела скорости (например, Rateset), заданного на этапе 606. Если команду пилота определяют как не являющуюся безопасной (то есть, как небезопасную), алгоритм 600 трехзонного предупреждения столкновений на этапе 614 выдает поток команд управления с этапа 610. Если команду пилота определяют как безопасную, алгоритм 600 трехзонного предупреждения столкновений на этапе 616 выдает входной поток команд пилота с этапа 602.
На фиг. 6b показан пример варианта реализации трех зон, то есть панической зоны 618, критической зоны 620 и входящей зоны 622. Летательный аппарат 200 может иметь поле зрения, показанное на фиг. 6b. В этом варианте реализации поле зрения представляет поле зрения датчиков вплоть до максимальной дальности действия датчика. Поле зрения может быть разделено на три зоны на основании входных данных оператора о пороговых значениях, таких как паническое пороговое значение 624 и входное пороговое значение 626. В силу этого управление летательного аппарата 200 может быть единственным образом ограничено по мере того, как летательный аппарат 200 входит в каждую из трех зон. В качестве примера, максимальная скорость транспортного средства 200, его ускорение и/или ограничение скорости могут быть ограничены по-разному по мере того, как летательный аппарат 200 входит в каждую из трех зон 618, 620, 622. Как только летательный аппарат 200 оказывается расположенным в панической зоне 618, система может управлять летательным аппаратом 200 с обеспечением сбрасывания скорости. По мере того, как летательный аппарат 200 входит в критическую зону 620 летательный аппарат 200 может дополнительно сбрасывать скорость или тормозить. В итоге, когда летательный аппарат 200 оказывается расположенным во входящей зоне 622 (например, летательный аппарат 200 находится в ближайшей зоне к препятствию в пределах своего поля зрения), команда торможения может быть выдана и/или упреждающая команда, введенная оператором, может быть проигнорированы с тем, чтобы отменить любую управляющую команду для маневрирования летательного аппарата 200 по направлению вперед. Эти и иные различные примеры запрещающих команд/управляющих команд могут быть очевидны специалистам в области техники ввиду настоящего изобретения.
Модуль содействия посадке. Модуль содействия посадке содержит схему для автономной посадки летательного аппарата 200 с использованием допустимых входных данных от оператора путем автоматического управления механизмом 304 управления направлением перемещения и/или торможением во время операции посадки. Однако в конкретных аспектах процессор 340 динамической системы 302 предупреждения столкновений может исполнять функцию содействия посадке. Модуль содействия посадке пользуется ответом датчика с тем, чтобы запретить летательному аппарату 200 садиться на препятствия и/или в местах, которые могут привести к крушению или иному отказу в работе летательного аппарата 200 (например, вследствие наличия препятствия). Модуль содействия посадке использует входные данные датчика для закрытия контура управления во время посадочного маневра с тем, чтобы обеспечить плавную и безопасную посадку. В частности, модуль содействия посадке использует входные данные от одного или более датчиков 210, выполненных с возможностью измерения дальности до многочисленных целей ниже летательного аппарата 200. Один или более датчиков 210 могут представлять собой, например, радиолокационные датчики, лазерные датчики для обнаружения и измерения дальности, стереоскопическое зрение (посредством двух или более камер) и т.п.
Система содействия посадке обеспечивает замкнутый контур управления и проверку безопасной посадки для системы 306 управления полетом летательного аппарата 200 без необходимости в навигационном знаке или операторе. Путем обследования участка посадки (например, на целевом объекте 102) и вычисления значения достоверности на основании фильтра целей (описан ниже), летательный аппарат 200 (посредством динамической системы 302 предупреждения столкновений/модуля 500 управления полетом и/или предупреждения столкновений (RFCA)/т.п.) может определить, может ли область ниже летательного аппарата 200 быть использована для автономной посадки с круговым маршрутом. В дополнение к идентификации и/или подтверждению безопасных зон посадки модуль содействия посадке также может сгенерировать команды регулирования тяги и/или управляющие команды для механизма 304 управления направлением перемещения для благополучной посадки летательного аппарата 200.
Модуль содействия посадке поддерживает безопасную работу летательного аппарата 200 посредством интервала по высоте и команды регулирования тяги по замкнутому контуру. Модуль содействия посадке измеряет высоту летательного аппарата 200 посредством одного или более датчиков 210 и осуществляет управление тягой с закрытым контуром летательного аппарата 200 для обеспечения содействия посадке. При обнаружении препятствия (например, модулем 500 управления полетом и/или предупреждения столкновений (RFCA) в обращенной книзу конфигурации или другими датчиками 210), операция запрета на посадку может быть осуществлена в случае, когда летательный аппарат 200 прерывает свою посадку и/или идентифицирует новую зону посадки. Кроме того, результаты измерений дальности фильтруют для первоочередного определения цели посадки и в дальнейшем для создания управления тягой с закрытым контуром/управляющей команды, а в итоге для «запрета» (например, аварийного прерывания) автономной посадки, которая не удовлетворяет параметрам посадки (таким как достоверность, максимальная дальность и скорость снижения). В дальнейшем модуль 500 управления полетом и/или предупреждения столкновений (RFCA) может идентифицировать новую зону посадки на основании результатов измерений датчика или осуществлять маневр, отличный от парения, в случае, когда зона посадки была сочтена небезопасной.
На фиг. 7 показан пример схемы 700 содействия посадке для функции содействия посадке модуля содействия посадке. Как показано, входные данные для модуля содействия посадке принимают на этапе 702. Входные данные могут содержать массив значений дальности и параметры посадки, которые могут быть сгенерированы оператором, являющимся человеком, или автопилотом.
На этапе 704 фильтр целей при посадке определяет количество целей на основании массива значений дальности. На этапе 706 модуль содействия посадке определяет, превышает ли количество целей одну штуку. Если количество целей превышает одну штуку, модуль содействия посадке переходит к этапу 708, в противном же случае модуль содействия посадке переходит к этапу 710. На этапе 708 модуль содействия посадке задает цель равной Minimum(Range_Array) и переходит к этапу 710. На этапе 710 модуль содействия посадке определяет, удовлетворяет ли цель параметрам посадки. Если цель удовлетворяет параметрам посадки, модуль содействия посадке переходит к этапу 712, в противном же случае модуль содействия посадке переходит к этапу 716. На этапе 712 модуль содействия посадке задает Land_State равной «Ложь» и переходит к этапу 714. На этапе 714 модуль содействия посадке выдает, например, Land_State в систему 306 управления полетом. На этапе 716 модуль содействия посадке задает Land_State равной «Правда» и переходит к этапу 718. На этапе 718 модуль содействия посадке использует пропорционально-интегрально-дифференциальный контроллер для генерирования управляющего сигнала и переходит к этапу 720. На этапе 720 модуль содействия посадке преобразует управляющий сигнал с этапа 718 в единицы Throttle_Cmd. На этапе 722 модуль содействия посадке выдает, например, Land_State и Throttle_Cmd с этапа 720 в систему 306 управления полетом. В дальнейшем система управления полетом транспортного средства может запросить Land_State принять соответствующие меры и применить Throttle_Cmd к подходящему контуру управления.
Стандартные выходные данные от модуля содействия посадке могут содержать, например: Altitude_Clearance, Pilot_Thrust_Command и Land_State. Однако выходные данные могут быть настроены с тем, чтобы соответствовать конкретной потребности. Настроенные выходные данные могут содержать, например: Altitude_Relative и Target_VZ (скорость в z-направлении). Параметры модуля содействия посадке могут быть настроены посредством прикладного программного интерфейса (API).
Модуль фильтрации целей. Проблема, связанная с радиолокационными датчиками, заключается в том, что выходные данные обычно разделены и представляют собой беспорядочные данные вследствие способности радиолокационных датчиков обнаруживать объекты на большой площади. Следовательно, может быть затруднительно истолковать данные, полученные обратно от радиолокационного датчика, в особенности для процессов принятия навигационного решения. При работе радиолокационный датчик может измерять пять наиболее заметных объектов в пределах своей прямой видимости для выдачи относительного расстояния до объекта и амплитуды, при которой радиолокационный датчик осуществляет обнаружение. Эти значения обычно представляют собой выходные данные в порядке убывающих амплитуд, однако этот способ получения ответной реакции является неподходящим для предупреждения столкновений и обеспечения автономного полета, поскольку в динамической окружающей среде преграды постоянно превосходят друг друга по амплитуде (что отслеживает радиолокационный датчик), при этом сообщаемые расстояния чередуются; что вызывает большие скачки в ответных данных, что существенно влияет на контроллеры с обратной связью.
Решение заключается в использовании модуля фильтрации целей, содержащего схему для реализации алгоритма фильтрации целей для обнаружения реальных объектов в сравнении с шумом и для отслеживания объектов таким образом, что чистые ответные сигналы возвращают в летательный аппарат 200. Модуль фильтрации целей реализует алгоритм фильтрации целей для предотвращения скачков, сглаживания выходных данных и выдачи значения достоверности, которое может быть использовано для предотвращения ошибочных срабатываний системы предупреждения столкновений. Таким образом, фильтрация целей и оптимизация радиолокационного блока с пятью дальностями действия и пятью параметрами, обеспечивает возможность идентификации и отслеживания преград с использованием данных, полученных от радиолокационного датчика. Таким образом, модуль фильтрации целей может обеспечивать фильтрацию и оптимизацию полезной нагрузки радиолокационного датчика с пятью дальностями действия и пятью параметрами для летательного аппарата 200 для решения этой проблемы путем обеспечения возможности одновременного отслеживания пяти объектов.
Наличие возможности отслеживания объектов улучшает автономную навигацию и предупреждение столкновений. В конкретных аспектах процессор 340 динамической системы 302 предупреждения столкновений может исполнять раскрытую функцию фильтрации целей. Таким образом, модуль фильтрации целей преобразует нестабильные радиолокационные результаты измерений с помехами в чистый сигнал, подходящий для его использования для предупреждения столкновений, а также ответных данных при автономном полете. Модуль фильтрации целей увеличивает мощность радиолокационного модуля с одновременным преодолением его недостатков для оптимизации технических характеристик летательного аппарата 200. Схожие решения могут быть получены путем внесения незначительных изменений в данный алгоритм. При выборе подфункции (то есть типы цифровых фильтров, линейная аппроксимация против аппроксимации полиномиальном кривой, нормальное распределение по кривой Гаусса против биномиального распределения и т.п.) имеется некоторая гибкость в плане выбора.
На фиг. 8 показана диаграмма 800 входных данных и выходных данных для примера модуля фильтра целей, который содержит схему для объединения данных датчика от одного или более датчиков 210 для создания отфильтрованных диапазонов с соответствующими значениями достоверности с использованием алгоритма 812 работы фильтра целей. Один или более датчиков 210 могут содержать радиолокационный датчик и альтиметр для сбора результатов 802 измерений высоты, радиолокационная (RADAR) амплитуда 804 и радиолокационная (RADAR) дальность 806. При использовании технологии 810 надлежащего извлечения сигналов алгоритм 812 работы фильтра целей может обнаруживать посторонние результаты измерений от радиолокационного датчика для исключения ошибочных точек данных. Показания дальности действия и значения достоверности вычисляют с использованием взвешенных средних характеристик сигнала, радиолокационных (RADAR) амплитуд и оценки фонового шума.
На фиг. 9 показан пример блоке-схемы 900 для обеспечения функциональной возможности по фильтрации целей с использованием модуля фильтрации целей, при этом Std_Dev является стандартным отклонением 20 самых последних точек кривой путем линейной регрессии этих 20 точек. Min_Diff является минимальной разницей между самой последней дальностью действия кривой и назначенной дальностью действия из поступающих данных. Iteranon_Counter (счет итераций или показание счетчика) является количеством последовательных экстраполяций. В итоге, значение достоверности является достоверностью дальности действия, являющейся реальной целью, которую вычисляют с использованием взвешенных сумм амплитуды и Std_Dev.
На этапе 902 модуль фильтрации целей принимает первые из пяти новых дальностей и амплитуд от радиолокационного датчика для пяти наиболее заметных объектов в пределах прямой видимости и затем переходит к этапу 904. На этапе 904 модуль фильтрации целей определяет, является ли амплитуда предельной. Если амплитуда является предельной на этапе 904, модуль фильтрации целей задает дальности в ранее хорошо известное значение на этапе 906 и продолжает на этапе 908. Если амплитуда не является предельной на этапе 904, модуль фильтрации целей продолжается на этапе 908. На этапе 908 модуль фильтрации целей вычисляет Std_Dev и переходит к этапу 910. На этапе 910 модуль фильтрации целей вычисляет и/или идентифицирует новую точку дальности, то есть оптимальная подгонка для текущей кривой и переходит к этапу 912. На этапе 912 модуль фильтрации целей вычисляет Min_Diff и переходит к этапу 914. На этапе 914 модуль фильтрации целей определяет, имеется ли соответствие четырем условиям, при этом этими четырьмя условиями являются: (1) превышает ли Min_Diff в 3,5 раза Std_Dev; (2) Min_Diff превышает ли в 0,4 раза; (3) Std_Dev меньше ли 0,2; и (4) Iteration_Counter меньше ли 15. Если каждое из четырех условий соблюдено на этапе 914, модуль фильтрации целей переходит к этапу 916; в противном случае модуль фильтрации целей переходит к этапу 920.
На этапе 916 модуль фильтрации целей вычисляет новую отфильтрованную точку диапазона с использованием линейной регрессии и переходит к этапу 918. На этапе 918 модуль фильтрации целей увеличивает на шаг Iteration_Counter и переходит к этапу 924.
На этапе 920 модуль фильтрации целей назначает оптимальную точку данных от радиолокационного датчика для фильтрации выходного диапазона и переходит к этапу 922. На этапе 922 модуль фильтрации целей удаляет назначенные дальности действия из потенциально используемых на кривых и переходит к этапу 924.
На этапе 924 модуль фильтрации целей вычисляет достоверность низкочастотное пропускание с использованием фильтра нижних частот с критическим затуханием (LPF) и переходит к этапу 926. Достоверность и значения низкочастотного пропускания могут быть вычислены с использованием взвешенного среднего статистических показателей, извлеченных из входного сигнала дальности действия (например, среднего сигнала, стандартного отклонения и амплитуды). Взвешивание показателей при вычислении достоверности может быть определено оператором (то есть, задано оператором) и настроено для обеспечения необходимых технических характеристик фильтра (например, оператором). На этапе 926 модуль фильтрации целей повторяет вышеописанное (начиная с этапа 902) для каждой из дальностей 2-5 действия, при этом если все из дальностей 1-5 действия являются завершенными, то переходит к этапу 928. На этапе 928 модуль фильтрации целей возвращает отфильтрованный диапазон и значения достоверности.
В некоторых вариантах реализации достоверность и низкочастотные значения могут быть определены на основании окружающей среды, в которой летательный аппарат 200 обычно приводят в действие. Например, в рабочей окружающей среде, в которой снег является нормой, коэффициент отражения снега можно считать стандартной причиной регистрируемого уровня шума. В силу этого система может задавать достоверность и/или низкочастотное значение для регулирования допустимого уровня шума, регистрируемого радиолокационным датчиком. Аналогичным образом, алгоритм машинного обучения может быть применен вместе с функциональной возможностью по фильтрации целей системы, описанной в данном документе.
Системы, описанные в данном документе, также могут содержать клиентские устройства, которые могут содержать любые устройства, включаемые операторами для приведения в действие, регулирования, мониторинга, управления или взаимодействия с навигационной системой или автономным транспортным средством. Они могут содержать настольные компьютеры, портативные компьютеры, сетевые компьютеры, планшеты или любое иное вычислительное устройство, которое может быть использовано в системах, описанных в данном документе. Клиентские устройства могут содержать интерфейс для взаимодействия с оператором, который может содержать графический пользовательский интерфейс (GUI) в качестве интерфейса для взаимодействия с оператором, линейный интерфейс для текста или команд, интерфейс для голосового управления и/или интерфейс для управления жестами для управления работой навигационной системы или автономного транспортного средства. Интерфейс для взаимодействия с оператором может быть обеспечен посредством локального приложения, исполняемого на одном из клиентских устройств, которые принимают данные и информацию о состоянии, например, от навигационной системы или автономного транспортного средства. Интерфейс для взаимодействия с оператором может создавать подходящий дисплей на клиентском устройстве для взаимодействия с оператором. Например, интерфейс для взаимодействия с оператором может содержать дисплей, отображающий в реальном времени виды с камер в оптической системе или отображающий иные данные от других датчиков в навигационной системе. В других вариантах реализации интерфейс для взаимодействия с оператором может обслуживаться удаленно и может быть представлен на одном из клиентских устройств. Например, навигационная система или автономное транспортное средство содержит веб-сервер, который обеспечивает информацию посредством одной или более веб-страниц или т.п., которые могут быть отображены в веб-браузере или схожем клиенте, исполняемом на одном из клиентских устройств. В одном из аспектов интерфейс для взаимодействия с оператором может содержать интерфейс для голосового управления, который принимает голосовые команды от оператора и/или выдает голосовой ответ оператору.
Несмотря на то, что вышеописанные системы первоначально описаны применительно к воздушным транспортным средствам, специалист в области техники должен понимать, что такие системы, способы и технологии могут быть использованы вместе с другими технологиями, такими как машинное оборудование, складское оборудование, строительное оборудование, краны, кресла-каталки с питанием от источника питания, оборудование для аэропорта и т.п.
Вышеописанные системы, устройства, способы, процессы и т.п. могут быть реализованы в аппаратном обеспечении, программном обеспечении или любом их сочетании, подходящем для управления данными, сбора данных и обработки данных, как описано в данном документе. Это содержит реализацию в одном или более микропроцессорах, микроконтроллерах, встроенных микроконтроллерах, программируемых процессорах для цифровой обработки сигналов или иных программируемых устройствам или обрабатывающих схемах вместе с внутренней памятью и/или внешней памятью. В качестве дополнения или альтернативы это может содержать одну или более интегральных схем специального назначения, программируемые пользователем вентильные матрицы, компоненты на основе программируемой матричной логики или любое другое устройство или любые другие устройства, которые могут быть выполнены с возможностью обработки электронных сигналов. Кроме того, следует понимать, что реализация вышеописанных процессов или устройств может содержать исполняемый компьютером код, который создан с использованием языка структурного программирования, такого как язык программирования «С», объектно-ориентированного языка программирования, такого как язык программирования «С++», или любого другого высокоуровневого или низкоуровневого языка программирования (в том числе языков ассемблера, языков описания аппаратных средств, а также языков и технологий программирования баз данных), и который может быть сохранен, откомпилирован или интерпретирован для запуска на одном из вышеописанных устройств, а также гетерогенных сочетаниях процессоров, процессорных архитектур или сочетаниях различных аппаратных средств и различного программного обеспечения. Наряду с этим функции по обработке данных могут быть распределены по устройствам, таким как различные вышеописанные системы, или все из функциональных возможностей могут быть встроены в специальное автономное устройство. Все такие преобразования и сочетания находятся в пределах объема настоящего изобретения.
Варианты реализации, раскрытые в данном документе, могут содержать компьютерные программные продукты, содержащие исполняемый компьютером код или используемый компьютером код, который, при его исполнении на одном или более вычислительных устройствах, осуществляет любой из этапов и/или все этапы вышеописанных систем управления. Код может быть сохранен в компьютерной памяти с возможностью его длительного хранения, которая может представлять собой память, из которой исполняют программу (такую как оперативная память, связанная с процессором), или запоминающее устройство, такое как дисковый накопитель, флэш-память или любое другое оптическое устройство, электромагнитное устройство, магнитное устройство, инфракрасное устройство или иное устройство, или сочетание вышеуказанных устройств. Еще в одном аспекте любые из вышеописанных систем и способов могут быть реализованы в любой подходящей среде передачи или распространения данных, переносящей исполняемый компьютером код и/или любые входные данные или выходные данные.
Этапы способа реализаций, описанных в данном документе, предназначены для того, чтобы включать любой подходящий способ, вызывающий то, что одна или более иных сторон или субъектов выполняют этапы в соответствии с патентоспособными пунктами формулы изобретения, если только специально не предусмотрено иное или явным образом не следует из контекста. Такие стороны или субъекты не обязательно должны находиться под контролем или управлением любой другой стороны или любого другого субъекта и не обязательно должны находиться к конкретной юрисдикции.
Любые патенты, публикации патентных заявок или статьи, цитированные в данном документе, настоящим полностью включены в данный документ посредством ссылки. Следует учитывать, что вышеописанные способы и системы приведены в качестве примера, а не ограничения. Многочисленные изменения, дополнения, удаления и иные модификации станут очевидны специалисту в области техники. Кроме того, порядок или представление этапов способа в приведенном выше описании и прилагаемые чертежи не требуют этого порядка выполнения перечисленных этапов, если только нет особой необходимости в конкретном порядке или конкретный порядок явным образом не следует из контекста. Таким образом, несмотря на то что были описаны и показаны конкретные варианты реализации, специалистам в области техники будет понятно, что различные изменения и модификации в части формы и особенностей могут быть реализованы без выхода за рамки сущности и объема настоящего изобретения и формируют часть настоящего изобретения, охарактеризованного в пунктах формулы изобретения, которые следует интерпретировать наиболее широким образом, допускаемым законодательством.
В следующих пунктах формулы раскрыта сущность настоящего изобретения.
Пункт 1. Способ обеспечения защиты от столкновений в летательном аппарате (100, 200), включающий:
прием входных данных (210, 332) датчика от датчика (210, 332), размещенного на летательном аппарате (100, 200) и функционально соединенного с процессором (314, 340), при этом датчик (210, 332) выполнен с возможностью идентификации препятствия (122) в пределах поля зрения;
прием потока команд пилота от пилота;
осуществление идентификации препятствия (122) в пределах поля зрения по меньшей мере частично на основании входных данных (210, 332) датчика;
определение зоны (618, 620, 622) из множества зон (618, 620, 622) в пределах поля зрения, в которой находится препятствие (122), по меньшей мере частично на основании входных данных (210, 332) датчика;
задание входных данных управления как функции (618, 620, 622) зоны, определенной на указанном этапе определения;
осуществление ввода входных данных управления в пропорционально-дифференциальный контроллер для создания данных управления;
генерирование, посредством процессора (314, 340), потока команд управления как функции данных управления; и
сравнение, посредством процессора (314, 340), потока команд управления с потоком команд пилота для определения, является ли безопасным поток команд пилота от пилота.
Пункт 2. Способ по пункту 1, согласно которому в случае, когда определено, что поток команд пилота не является безопасным, поток команд управления передают в контроллер (206, 306) для управления полетом летательного аппарата (100, 200) вместо потока команд пилота.
Пункт 3. Способ по пункту 1 или 2, согласно которому в случае, когда поток команд пилота от пилота определен как безопасный, поток команд пилота передают в контроллер (206, 306) для управления полетом летательного аппарата (100, 200).
Пункт 4. Способ по любому из предыдущих пунктов, согласно которому входные данные датчика (210, 332) содержат оценку скорости сближения или оценку дальности.
Пункт 5. Способ по любому из предыдущих пунктов, согласно которому поток команд пилота создан пилотом, являющимся является потоком от пилота, являющегося человеком.
Пункт 6. Способ по любому из предыдущих пунктов, согласно которому поток команд пилота создан автопилотом является потоком от автопилота.
Пункт 7. Способ по любому из предыдущих пунктов, согласно которому указанное множество зон (618, 620, 622) содержит первую зону (618, 620, 622), вторую зону (618, 620, 622) и третью зону (618, 620, 622).
Пункт 8. Способ по пункту 7, согласно которому первая зона (618, 620, 622) определена как область между максимальной дальностью действия датчика (210, 332) и первым пороговым значением.
Пункт 9. Способ по пункту 7 или 8, согласно которому вторая зона (618, 620, 622) определена как область между первым пороговым значением и вторым пороговым значением.
Пункт 10. Способ по любому из пунктов 7-9, согласно которому третья зона (618, 620, 622) определена как область между вторым пороговым значением и летательным аппаратом (100, 200).
Пункт 11. Способ по любому из предыдущих пунктов, согласно которому поток команд пилота оказывается определенным как небезопасный в случае, если поток команд пилота интерпретирован процессором (314, 340) как попытка (1) уменьшить дальность между летательным аппаратом (100, 200) и препятствием (122) или (2) увеличить скорость летательного аппарата (100, 200) выше предела скорости, заданного данными управления.
Пункт 12. Способ по любому из предыдущих пунктов, дополнительно включающий этап приема команды блокировки пилота от пилота, при этом команда блокировки пилота блокирует поток команд управления.
Пункт 13. Навигационная система для обеспечения защиты от столкновений в летательном аппарате (100, 200), содержащая:
датчик (210, 332), выполненный с возможностью соединения с летательным аппаратом (100, 200) и возможностью идентификации препятствия (122) в пределах поля зрения;
процессор (314, 340), функционально соединенный с датчиком (210, 332) и запоминающим устройством, при этом процессор (314, 340) выполнен с возможностью приема потока команд пилота от пилота и дополнительно выполнен с возможностью:
идентификации препятствия (122) в пределах поля зрения по меньшей мере частично на основании входных данных (210, 332) датчика от датчика (210, 332);
определения зоны (618, 620, 622) из множества зон (618, 620, 622) в пределах поля зрения, в которой находится препятствие (122), по меньшей мере частично на основании входных данных (210, 332) датчика;
задания входных данных управления как функции зоны (618, 620, 622), определенной на указанном этапе определения;
ввода входных данных управления в пропорционально-дифференциальный контроллер для создания данных управления;
создания, посредством процессора (314, 340), потока команд управления как функции данных управления; и
сравнения, посредством процессора (314, 340), потока команд управления с потоком команд пилота для определения, является ли безопасным поток команд пилота от пилота.
Пункт 14. Навигационная система по пункту 13, в которой в случае, когда определено, что поток команд пилота не является безопасным, обеспечена возможность передачи потока команд управления в контроллер (206, 306) для управления полетом летательного аппарата (100, 200) вместо потока команд пилота.
Пункт 15. Навигационная система по любому из пунктов 13-14, в которой в случае, когда поток команд пилота от пилота определен как безопасный, обеспечена возможность передачи потока команд пилота в контроллер (206, 306) для управления полетом летательного аппарата (100, 200).
Пункт 16. Навигационная система по любому из пунктов 13-15, в которой входные данные датчика (210, 332) содержат оценку скорости сближения или оценку дальности.
Пункт 17. Навигационная система по любому из пунктов 13-16, в которой поток команд пилота создан пилотом, являющимся является потоком от пилота, являющегося человеком.
Пункт 18. Навигационная система по любому из пунктов 13-17, в которой поток команд пилота, созданный автопилотом, является потоком от автопилота.
Пункт 19. Навигационная система по любому из пунктов 13-18, в которой указанное множество зон (618, 620, 622) содержит первую зону (618, 620, 622), вторую зону (618, 620, 622) и третью зону (618, 620, 622).
Пункт 20. Навигационная система по пункту 19, в которой первая зона (618, 620, 622) определена как область между максимальной дальностью действия датчика (210, 332) и первым пороговым значением.
Пункт 21. Навигационная система по пункту 19 или 20, в которой третья зона (618, 620, 622) определена как область между вторым пороговым значением и летательным аппаратом (100, 200).
Пункт 22. Навигационная система по пункту 21, в которой вторая зона (618, 620, 622) определена как область между первым пороговым значением и вторым пороговым значением.
Пункт 23. Навигационная система по любому из пунктов 13-22, в которой поток команд пилота оказывается определенным как небезопасный в случае, если поток команд пилота интерпретирован процессором (314, 340) как попытка (1) уменьшить дальность между летательным аппаратом (100, 200) и препятствием (122) или (2) увеличить скорость летательного аппарата (100, 200) выше предела скорости, заданного данными управления.
Пункт 24. Навигационная система по любому из пунктов 13-23, в которой процессор (314, 340) выполнен с возможностью приема команды блокировки пилота от пилота, которая блокирует поток команд управления.
Пункт 25. Навигационная система по любому из пунктов 13-24, в которой летательный аппарат (100, 200) представляет собой летательный аппарат (100, 200) с вертикальными взлетом и посадкой (VTOL).
Пункт 26. Навигационная система по любому из пунктов 13-25, дополнительно содержащая модуль содействия посадке для инструктирования летательного аппарата (100, 200) осуществить посадочный маневр для обхода преграды, обнаруженной ниже летательного аппарата (100, 200).
Пункт 27. Навигационная система по любому из пунктов 13-26, в которой процессор (314, 340) выполнен с возможностью осуществления операции фильтрации целей.
Пункт 28. Навигационная система по пункту 27, в которой операция фильтрации целей включает следующие этапы:
осуществление приема данных о дальности и амплитуде от радиолокационной системы для препятствия (122) в пределах прямой видимости летательного аппарата (100, 200);
определение, посредством процессора (314, 340), является ли амплитуда предельной, по меньшей мере частично на основании данных о дальности и амплитуде,
осуществление вычисления, посредством процессора (314, 340), стандартного отклонения по меньшей мере части кривой, отражающей данные о дальности и амплитуде со временем;
определение, посредством процессора (314, 340), новой точки дальности на кривой;
осуществление вычисления, посредством процессора (314, 340), минимальной разницы между новой точкой дальности на кривой и заданной дальностью из входящих данных; и
осуществление вычисления, посредством процессора (314, 340), достоверности и низкочастотного значения с использованием фильтра нижних частот с критическим затуханием (LPF).
Пункт 29. Навигационная система по пункту 28, в которой достоверность и низкочастотное значение вычислены с использованием взвешенного среднего статистических показателей, полученных из среднего сигналов, стандартного отклонения и амплитуды.
Пункт 30. Навигационная система по пункту 29, в которой взвешенное среднее задано оператором для обеспечения необходимых технических характеристик фильтра.
Пункт 31. Способ обеспечения фильтрации целей для увеличения точности в летательном аппарате (100, 200), включающий:
осуществление приема данных о дальности и амплитуде от радиолокационной системы для препятствия (122) в пределах прямой видимости летательного аппарата (100, 200);
определение, посредством процессора (314, 340), является ли амплитуда предельной, по меньшей мере частично на основании данных о дальности и амплитуде,
при этом процессор (314, 340) выполнен с возможностью задания дальностей в заведомо хорошее значение в случае, если амплитуда является предельной;
осуществление вычисления, посредством процессора (314, 340), стандартного отклонения по меньшей мере части кривой, отражающей данные о дальности и амплитуде со временем;
определение, посредством процессора (314, 340), новой точки дальности на кривой;
осуществление вычисления, посредством процессора (314, 340), минимальной разницы между новой точкой дальности на кривой и заданной дальностью из входящих данных;
определение, посредством процессора (314, 340), удовлетворено ли каждое из множества условий,
при этом процессор (314, 340) выполнен с возможностью вычисления новой фильтруемой точки дальности с использованием линейной регрессии в случае, если не удовлетворены одно или более из указанного множества условий;
увеличение счетчика итераций; и
осуществление вычисления, посредством процессора (314, 340), достоверности и низкочастотного значения с использованием фильтра нижних частот с критическим затуханием (LPF).
Пункт 32. Способ по пункту 31, согласно которому каждый из этапов, охарактеризованных в пункте 31, осуществляют для каждого из заданного количества препятствий (122) в пределах прямой видимости летательного аппарата (100, 200).
Пункт 33. Способ по пункту 32, согласно которому заданное количество препятствий (122) содержит пять препятствий (122), являющихся наиболее заметными в пределах прямой видимости летательного аппарата (100, 200).
Пункт 34. Способ по пункту 31 или 32, согласно которому стандартное отклонение получено на основе последних 20 точек кривой путем линейной регрессии этих 20 точек.
Пункт 35. Способ по пункту 34, согласно которому минимальная разница представляет собой разницу между последней дальностью на кривой и заданной дальностью из входящих данных.
Пункт 36. Способ по пункту 35, согласно которому указанное множество условий содержит: (1) превышает ли минимальная разница стандартное отклонение в 3,5 раза; и (2) превышает ли минимальная разница 0,4.
Пункт 37. Способ по пункту 36, согласно которому множество условий дополнительно содержат: (1) меньше ли стандартное отклонение 0,2; и (2) меньше ли счетчик итераций 15.
Пункт 38. Способ по любому из пунктов 31-37, согласно которому достоверность и низкочастотное значение вычисляют с использованием взвешенного среднего статистических показателей, полученных из среднего сигналов, стандартного отклонения и амплитуды.
Пункт 39. Способ по любому из пунктов 31-38, согласно которому взвешенное среднее задано оператором для обеспечения необходимых технических характеристик фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| СИСТЕМА РАЗДЕЛЕНИЯ ВОЗДУШНЫХ СУДОВ ПРИ ДВИЖЕНИИ | 2012 |
|
RU2601968C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ ИЗОБРАЖЕНИЯ НА НАВИГАЦИОННОМ ЭКРАНЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2381453C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
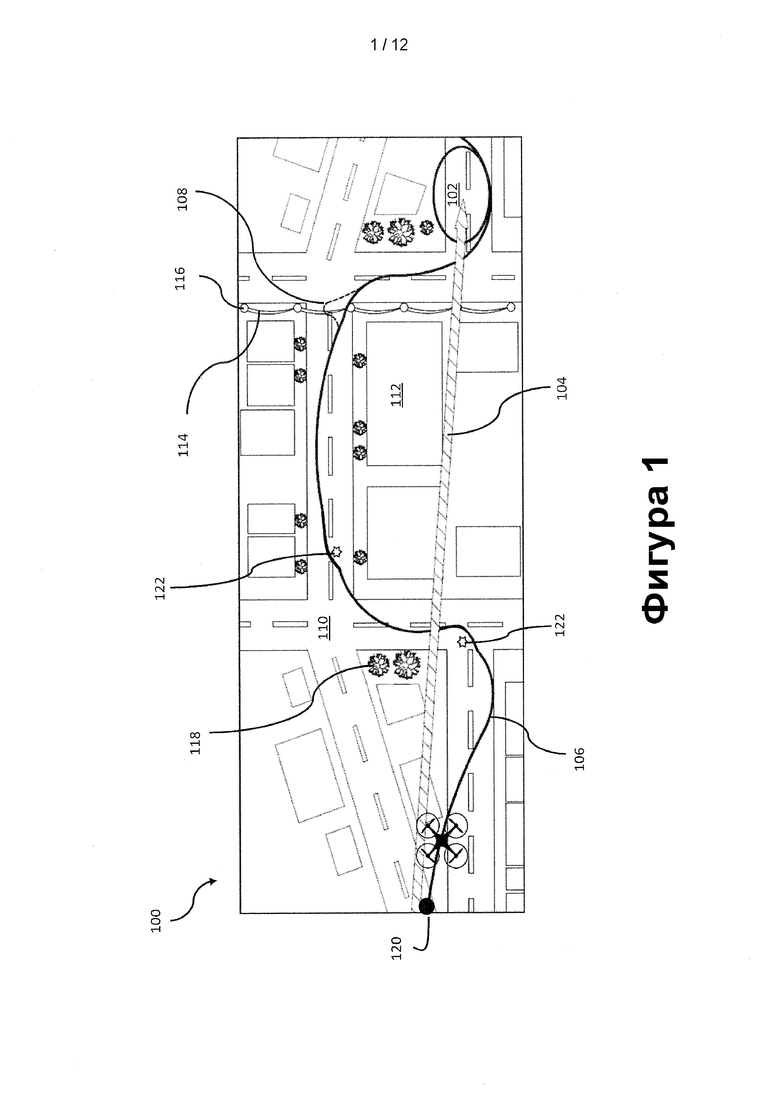

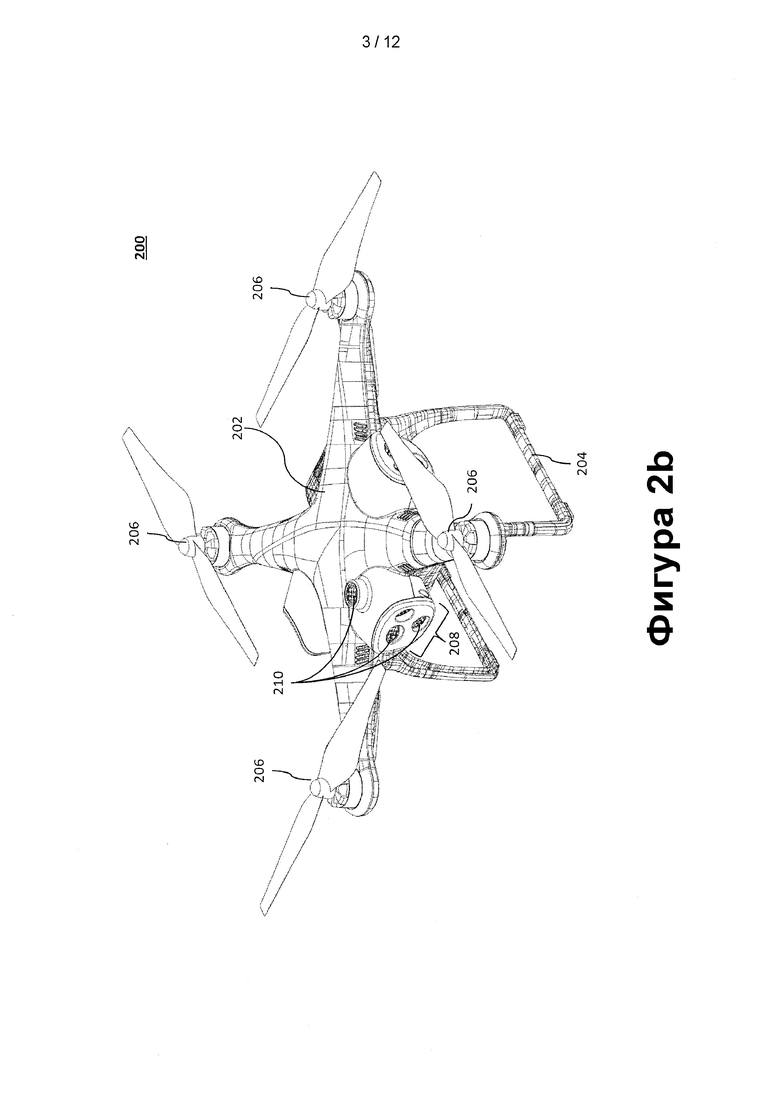
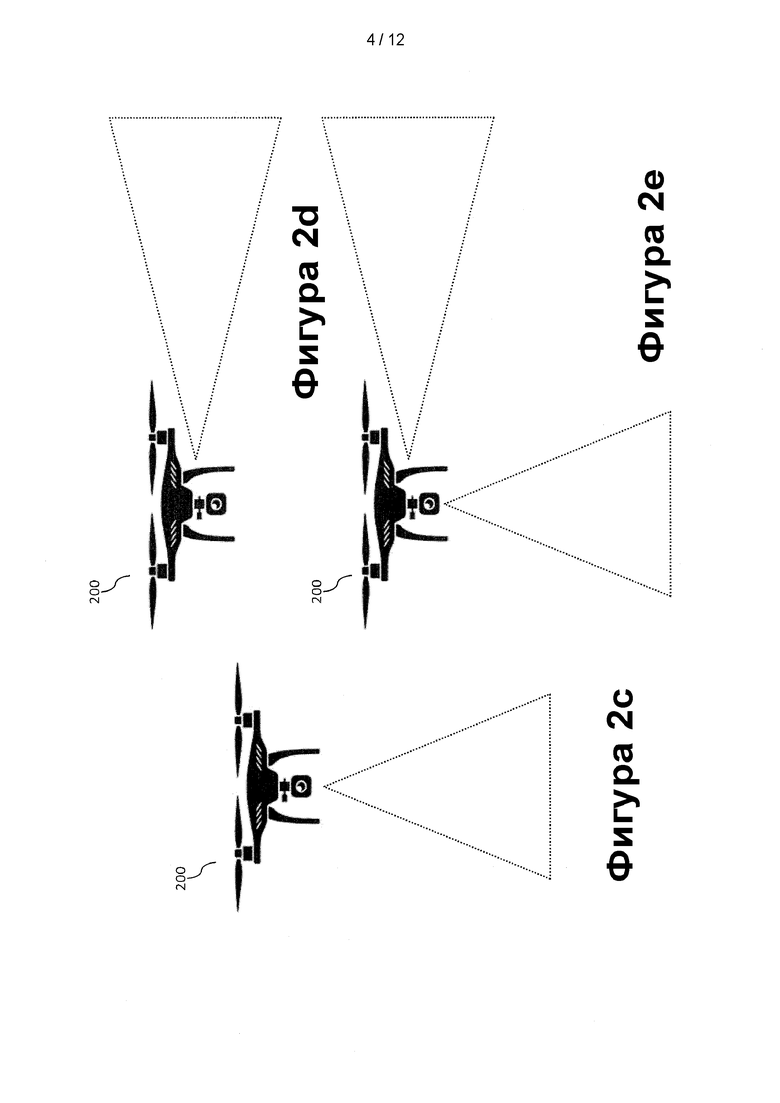
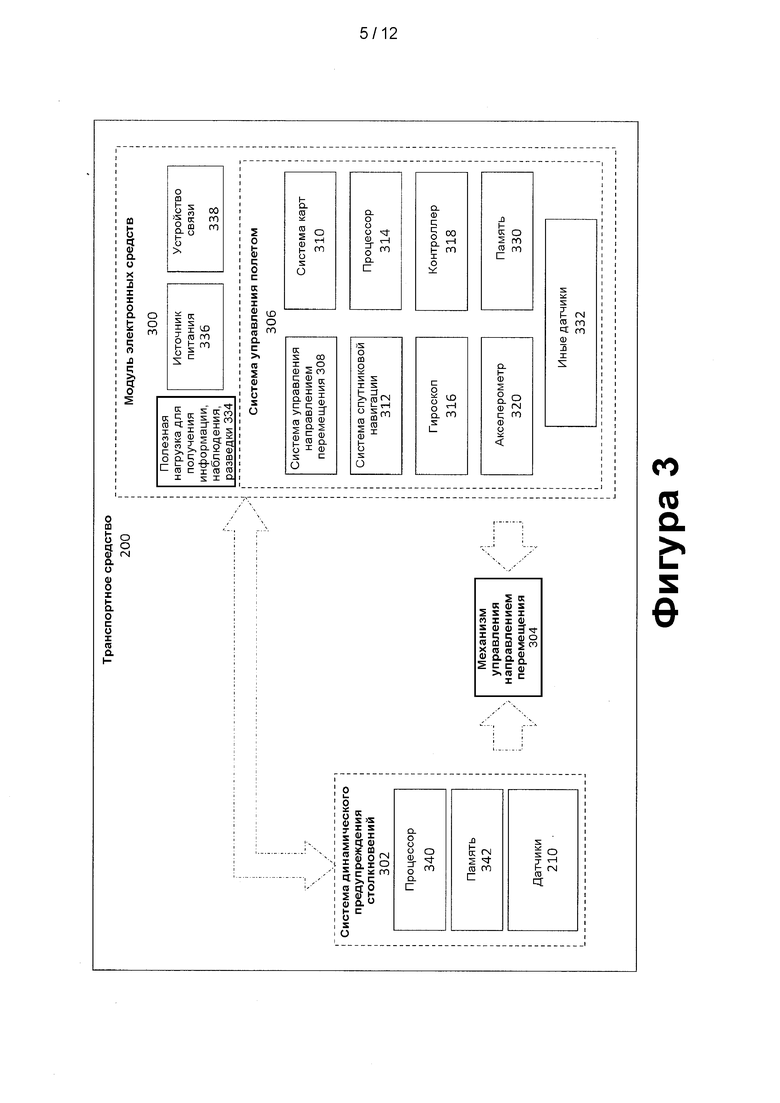
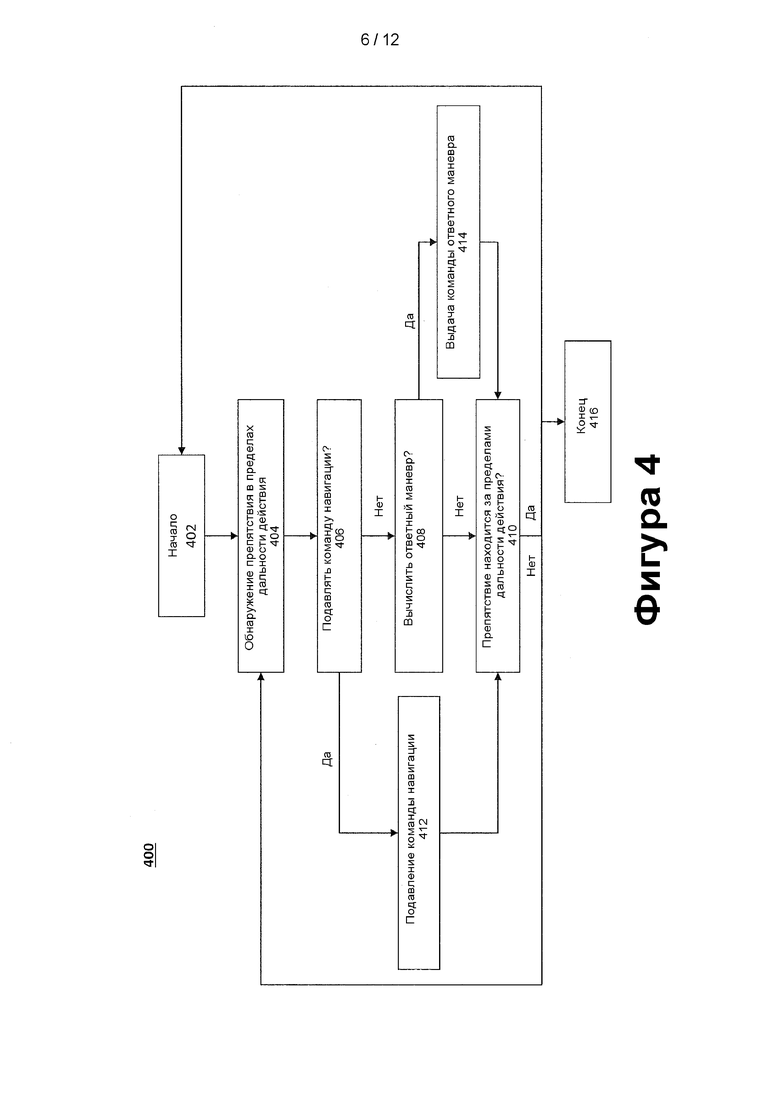
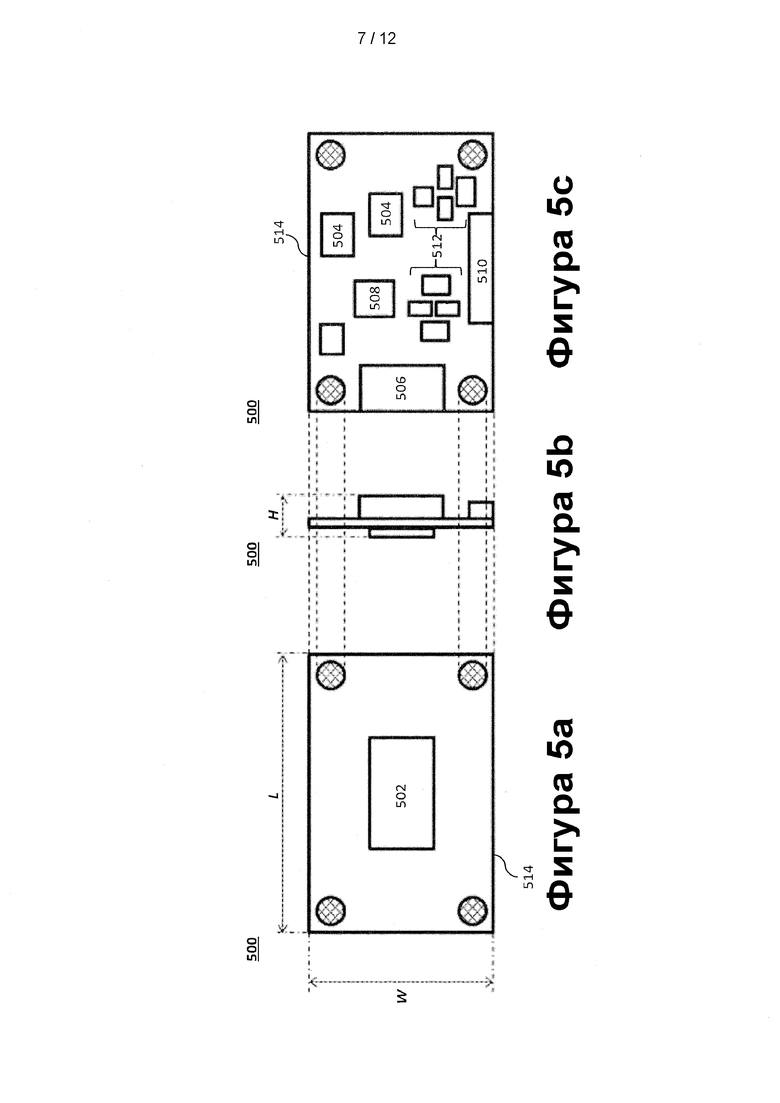
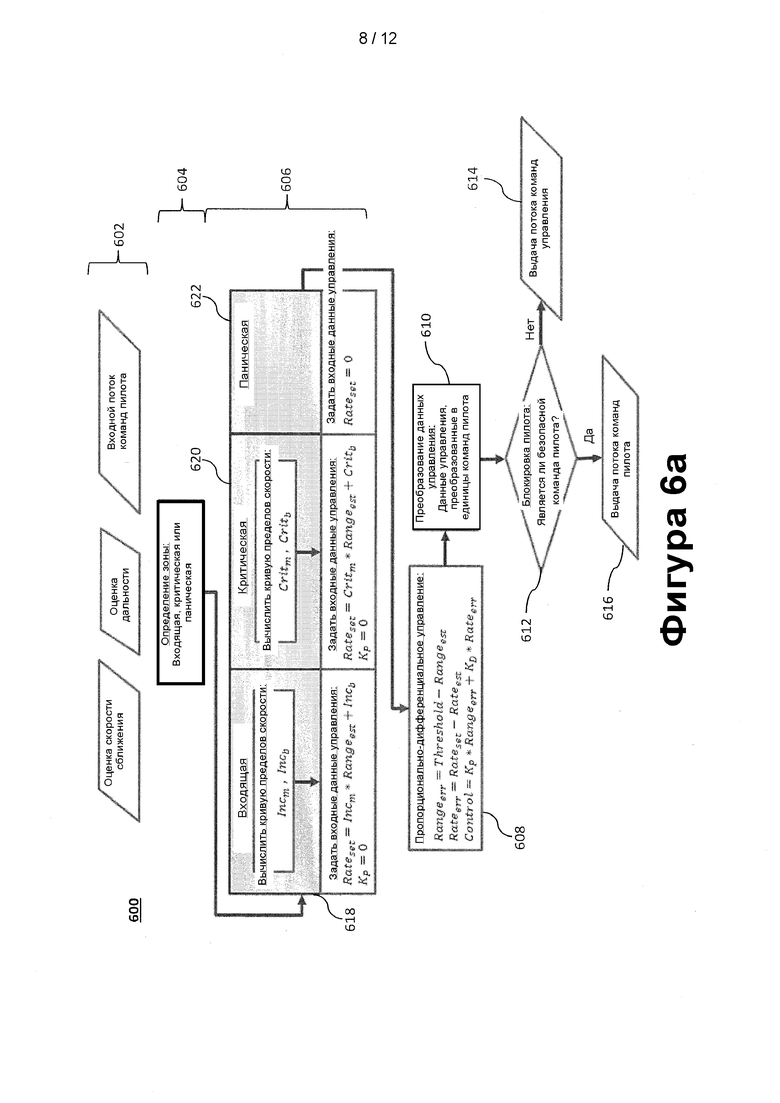

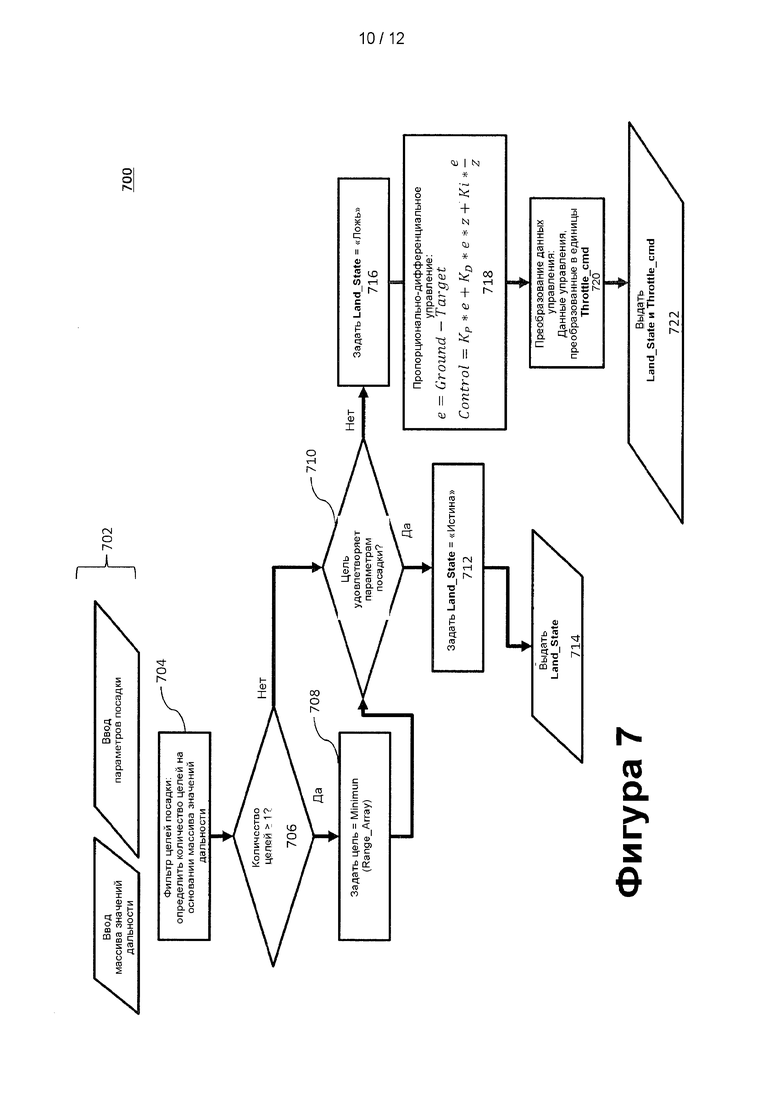
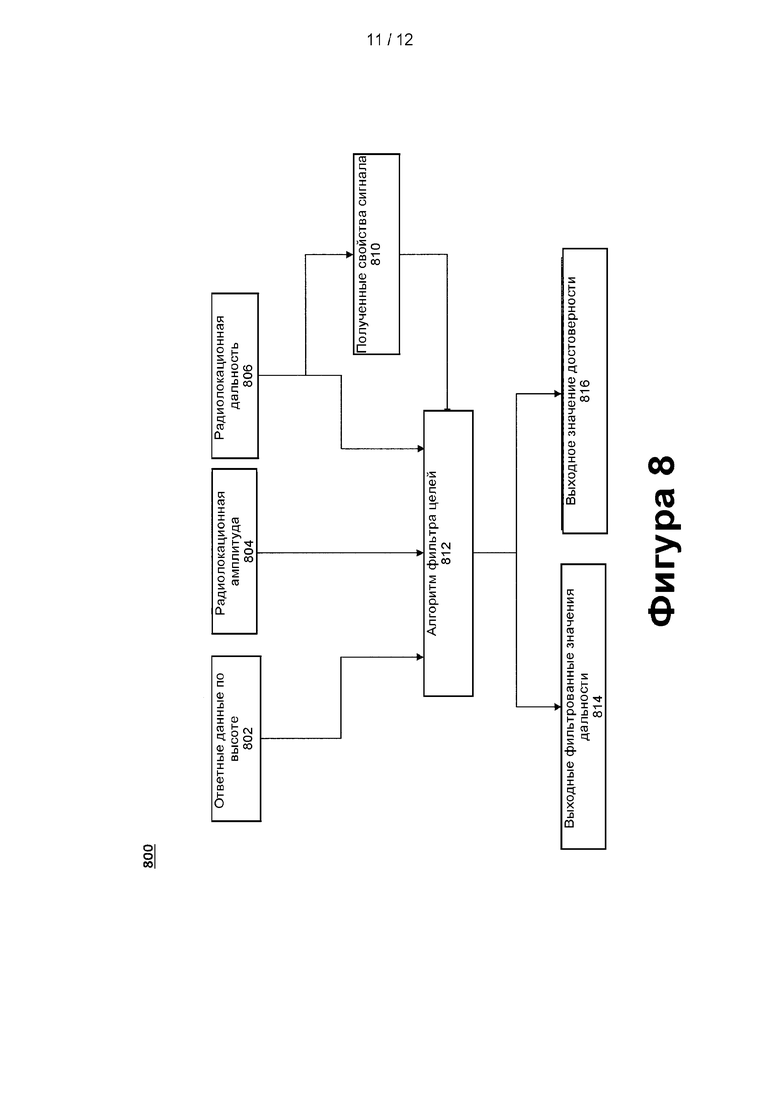
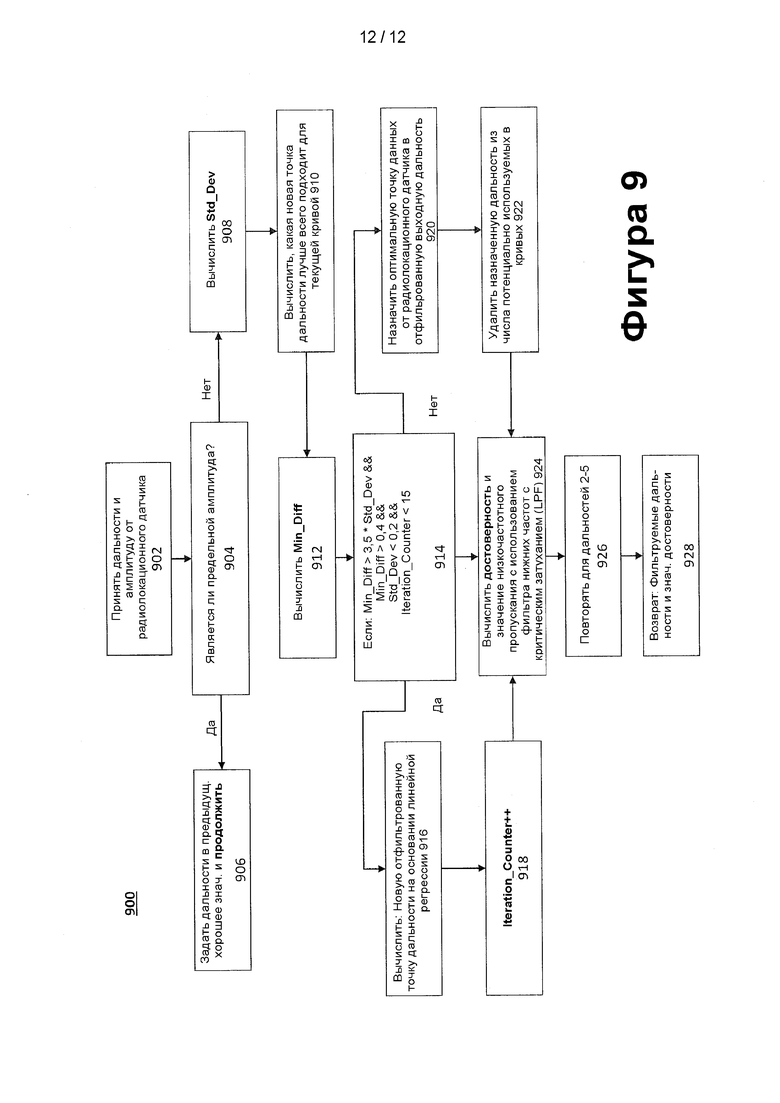
Группа изобретений относится к способу и навигационной системе для обеспечения защиты от столкновений в летательном аппарате. Для обеспечения защиты от столкновений сравнивают поток команд от пилота с данными управления, которые формируют путем обработки определенным образом данных датчика, выполняющего идентификацию препятствий, для определения безопасности этого потока команд. Навигационная система в летательном аппарате содержит датчик, выполненный с возможностью идентификации препятствий, процессор, запоминающее устройство. Обеспечивается повышение безопасности полета. 2 н. и 13 з.п. ф-лы, 9 ил.
1. Способ обеспечения защиты от столкновений в летательном аппарате (100, 200), включающий:
прием входных данных датчика (210, 332) от датчика (210, 332), размещенного на летательном аппарате (100, 200) и функционально соединенного с процессором (314, 340), при этом датчик (210, 332) выполнен с возможностью идентификации препятствий (122) в пределах поля зрения;
прием потока команд пилота от пилота;
осуществление идентификации препятствия (122) в пределах поля зрения по меньшей мере частично на основании входных данных датчика (210, 332);
определение зоны (618, 620, 622) из множества зон (618, 620, 622) в пределах поля зрения, в которой находится препятствие (122), по меньшей мере частично на основании входных данных датчика (210, 332);
задание входных данных управления как функции зоны (618, 620, 622), определенной на этапе определения;
осуществление ввода входных данных управления в пропорционально-дифференциальный контроллер для создания данных управления;
генерирование, посредством процессора (314, 340), потока команд управления как функции данных управления; и
сравнение, посредством процессора (314, 340), потока команд управления с потоком команд пилота для определения, является ли безопасным поток команд пилота от пилота.
2. Способ по п. 1, согласно которому в случае, когда определено, что поток команд пилота не является безопасным, поток команд управления передают в контроллер (206, 306) для управления полетом летательного аппарата (100, 200) вместо потока команд пилота.
3. Способ по п. 1 или 2, согласно которому в случае, когда поток команд пилота от пилота определен как безопасный, поток команд пилота передают в контроллер (206, 306) для управления полетом летательного аппарата (100, 200).
4. Способ по любому из предыдущих пунктов, согласно которому входные данные датчика (210, 332) содержат оценку скорости сближения или оценку дальности.
5. Способ по любому из предыдущих пунктов, согласно которому поток команд пилота является потоком от пилота, являющегося человеком.
6. Способ по любому из предыдущих пунктов, согласно которому поток команд пилота является потоком от автопилота.
7. Способ по любому из предыдущих пунктов, согласно которому указанное множество зон (618, 620, 622) содержит первую зону (618, 620, 622), вторую зону (618, 620, 622) и третью зону (618, 620, 622).
8. Способ по п. 7, согласно которому первая зона (618, 620, 622) определена как область между максимальной дальностью действия датчика (210, 332) и первым пороговым значением.
9. Способ по любому из предыдущих пунктов, согласно которому поток команд пилота определяют как небезопасный, если поток команд пилота интерпретирован процессором (314, 340) как попытка (1) уменьшить дальность между летательным аппаратом (100, 200) и препятствием (122) или (2) увеличить скорость летательного аппарата (100, 200) выше предела скорости, заданного данными управления.
10. Навигационная система для обеспечения защиты от столкновений в летательном аппарате (100, 200), содержащая:
датчик (210, 332), выполненный с возможностью соединения с летательным аппаратом (100, 200) и возможностью идентификации препятствий (122) в пределах поля зрения;
процессор (314, 340), функционально соединенный с датчиком (210, 332) и запоминающим устройством, при этом процессор (314, 340) выполнен с возможностью приема потока команд пилота от пилота и дополнительно выполнен с возможностью:
идентификации препятствия (122) в пределах поля зрения по меньшей мере частично на основании входных данных датчика (210, 332) от датчика (210, 332);
определения зоны (618, 620, 622) из множества зон (618, 620, 622) в пределах поля зрения, в которой находится препятствие (122), по меньшей мере частично на основании входных данных датчика (210, 332);
задания входных данных управления как функции зоны (618, 620, 622), определенной на этапе определения;
ввода входных данных управления в пропорционально-дифференциальный контроллер для создания данных управления;
создания, посредством процессора (314, 340), потока команд управления как функции данных управления; и
сравнения, посредством процессора (314, 340), потока команд управления с потоком команд пилота для определения, является ли безопасным поток команд пилота от пилота.
11. Навигационная система по п. 10, в которой в случае, когда определено, что поток команд пилота не является безопасным, обеспечена возможность передачи потока команд управления в контроллер (206, 306) для управления полетом летательного аппарата (100, 200) вместо потока команд пилота.
12. Навигационная система по п. 10 или 11, в которой в случае, когда поток команд пилота от пилота определен как безопасный, обеспечена возможность передачи потока команд пилота в контроллер (206, 306) для управления полетом летательного аппарата (100, 200).
13. Навигационная система по любому из пп. 10-12, в которой входные данные датчика (210, 332) содержат оценку скорости сближения или оценку дальности.
14. Навигационная система по любому из пп. 10-13, в которой поток команд пилота является потоком от пилота, являющегося человеком.
15. Навигационная система по любому из пп. 10-14, в которой поток команд пилота является потоком от автопилота.
| WO 2016008026 A1, 21.01.2016 | |||
| US 6219594 B1, 17.04.2001 | |||
| ЗЕРКАЛО | 1992 |
|
RU2042963C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОЛЕТЕ НА МАЛОЙ ВЫСОТЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2095280C1 |
| ОБЪЕМНЫЙ РАСХОДОМЕР ЖИДКОСТИ ИЛИ ГАЗА | 0 |
|
SU164139A1 |

