Изобретение относится к газодобывающей и нефтяной промышленности и может быть применено в области автоматизации для управления пневмоприводами и пневмогидроприводами шаровых кранов магистральных газовых, газоконденсатных и нефтяных трубопроводов.
Известно автоматическое устройство аварийного закрытия крана (патент РФ №2282088, F16K 17/02, опубликовано 20.08.2006), содержащее герметичную камеру, соединенную с трубопроводом и пневмоцилиндром с поршнем и штоком. Данное устройство снабжено дросселем с калиброванным отверстием и компенсирующим пневмоцилиндром. В компенсирующий пневмоцилиндр, свободно сообщающийся с трубопроводом, помещен второй конец штока. Герметичная камера сообщается с трубопроводом через дроссель с калибровочным отверстием.
К недостаткам данного устройства следует отнести отсутствие дистанционного контроля технологических параметров, дистанционного управления краном, срабатывание только по низкому давлению, что не позволяет осуществить защиту от повышения давления в трубопроводе в случае закрытия последующего крана далее по технологической линии, отсутствие контроля перепада давления на фильтре не позволяет контролировать степень загрязнение фильтра и при полном его засорении данное устройство также не сработает.
Известно электропневматическое устройство управления приводом шаровых кранов (патент РФ №2330192, F15B 9/03, F16K 31/126, опубликовано 27.07.2008), содержащее два электромагнита и два геркона во взрывонепроницаемой оболочке, пневмоклапаны и панель с каналами входа и выхода рабочего газа к приводу шарового крана, а также снабжено устройством автоматического аварийного закрытия шарового крана в виде пневмоцилиндра с калибровочным вентилем, которое реагирует на темп падения давления в магистральном газопроводе. При достижении темпа падения выше заданного пневмоцилиндр срабатывает и перемещением штока воздействует на пружинный механизм, который включает пневмоклапан закрытия шарового крана. Устройство снабжено планкой с регулировочным винтом на пружинном механизме, поворотным рычагом с постоянным магнитом на одном его конце, причем рычаг с помощью кронштейна установлен на взрывонепроницаемой оболочке, а внутри взрывонепроницаемой оболочки дополнительно установлен третий геркон. Поворотный рычаг выполнен с возможностью воздействия его постоянного магнита на третий дополнительный геркон при срабатывании пружинного механизма. При этом поворотный рычаг связан дополнительной пружиной с панелью так, что другим концом постоянно контактирует с регулировочным винтом планки пружинного механизма.
Известное устройство обеспечивает открытие или закрытие шарового крана путем дистанционной подачи сигнала на электромагниты с диспетчерского пульта, а также местное управление шаровым краном путем воздействия вручную на управляющие рычаги пневмоклапанов. Устройство обеспечивает также автоматическое закрытие шарового крана в случае разрыва магистрального газопровода, с блокировкой дистанционного пуска.
К недостаткам данного устройства следует отнести применение в конструкции устаревшего оборудования без функции дистанционной диагностики, большим количеством механических движущихся компонентов, что существенно снижает надежность системы и требует постоянного присутствия обслуживающего персонала для проведения технического обслуживания и ремонта, так в частности, в случае выхода из строя геркона, информация о положении крана может быть недостоверна, а функция блокировки открытия не работоспособна, что выяснится только по факту изменения положения крана или при проведении технического обслуживания.
По выполняемым технологическим функциям данное устройство наиболее близко к заявляемому в качестве изобретения техническому решению и может быть принято в качестве прототипа.
Задача, на решение которой направлено заявляемое техническое решение, заключается в расширении арсенала технических средств в данной области, а также повышении надежности и безопасности системы управления приводами шаровых кранов магистральных газопроводов.
Поставленная задача решается тем, что автоматизированный комплекс управления краном на газоконденсатопроводе, включающий в себя локальную систему управления, построенную на промышленном контроллере во взрывонепроницаемой оболочке, трубопроводы и запорную арматуру, отличается тем, что с целью повышения уровня безопасности и надежности для управления краном на газоконденсатопроводе в состав автоматизированного комплекса управления краном на газоконденсатопроводе включены реле давления, датчик давления, быстроразъемное соединение, портативный анализатор влажности, оптическая линия связи, оборудование для подключения оптической линии к автоматизированной системе управления технологическими процессами (далее - АСУ ТП), а также применена распределенная система управления, построенная на программно-логическом контроллере (далее - ПЛК) автоматизированной системы управления технологическими процессами и на локальном ПЛК автоматизированного комплекса управления краном на газоконденсатопроводе, позволяющая дистанционно управлять положением крана, диагностировать состояние оборудования крана, а также в случае потери связи с АСУТП или ПЛК АСУТП закрывать кран в случае аварийных ситуаций без участия персонала по алгоритмам аварийной защиты, заложенным в ПЛК автоматизированного комплекса управления краном на газоконденсатопроводе.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение уровня безопасности и надежности автоматической системы управления краном за счет распределенного метода управления, основанного на применении локального контроллера в составе автоматизированного комплекса управления краном на газоконденсатопроводе, позволяющего управлять приводом крана дистанционно с АСУТП (удаленно с пульта управления производственно-диспетчерской службы и командами с АСУТП, формируемыми в соответствии с алгоритмами автоматической защиты), дистанционно с терминала ПЛК АСУ ТП (терминал и ПЛК АСУ ТП установленными в блок-боксе на удалении 100-200 метров от крана), локально посредством ПЛК автоматизированного комплекса управления краном на газоконденсатопроводе в случае потери связи с АСУТП на основании измеренных значений давления, входящим в состав комплекса датчиком, а также дополнительно передавать в АСУТП значение давления в газоконденсатопроводе, значение давления газа управления, информацию о положении крана (открыт/закрыт) и диагностическую информацию об исправности датчика давления и индуктивных сигнализаторов положения крана.
Представленный чертеж поясняет сущность изобретения, где схематически изображен заявляемый автоматизированный комплекс управления краном на газоконденсатопроводе (фиг.).
Автоматизированный комплекс управления краном на газоконденсатопроводе включает в себя шкаф управления 1 соответствующего климатического исполнения, взрывозащищенные коробки 2 и 3, датчик давления 4, установленный на газоконденсатопроводе, реле давления 5 подключаемое импульсной линией 6 через запорную арматуру 7 к трубопроводу подачи газа управления 8, портативный анализатор влажности (на схеме не указан), подключаемый к импульсной линии 6 через быстроразъемное соединение 9 и запорную арматуру 10, ПЛК автоматизированного комплекса управления краном 11, установленный во взрывозащищенной коробке 2, управляющий электромагнитными клапанами по проводным линиям управления 12 и 13 через блок развязки 14, позволяющий осуществлять управление по проводным линиям управления 15 и 16 от ПЛК АСУТП 17 и по проводным линиям управления 18 и 19 ПЛК автоматизированного комплекса управления краном 11, формирующего команды в зависимости от режима работы. В штатном «дистанционном» режиме система находится под управлением ПЛК АСУТП 17 и сигналы на закрытие/открытие формируются по физическим проводным каналам и дублируются посредством сетевой передачи по волоконно-оптическим линии связи 20 (далее - ВОЛС). В случае нештатной ситуации отключения ПЛК АСУТП 17, ПЛК автоматизированного комплекса управления краном 11 переводит автоматизированный комплекс управления краном на газоконденсатопроводе в «локальный режим» и формирует управляющие команды по заложенному в него аварийному алгоритму управления, основываясь на данных получаемых с датчика давления 4, реле давления 5, и индуктивных сигнализаторов конечных положений (на схеме не указаны), подключенных к ПЛК автоматизированного комплекса управления краном 11 по проводным линиям управления 21 и 22 и ПЛК АСУТП 17 по проводным линиям управления 23 и 24 через модуль развязки 25 проводными линиями связи 26 и 27, что позволяет получать данные о положении крана одновременно ПЛК автоматизированного комплекса управления краном 11 и ПЖ АСУТП 17. ВОЛС 20 позволяют организовать передачу данных от ПЛК автоматизированного комплекса управления краном 11 посредством медиоконверторов 28 и 29 в АСУТП 30 и в систему диагностики работоспособности оборудования автоматизации 31.
Автоматизированный комплекс управления краном на газоконденсатопроводе работает следующим образом в трех режимах: дистанционный, локальный автоматический и ручной.
1. Дистанционный режим является основным режимом управления. В данном случае управление приводом крана осуществляется ПЛК АСУ ТП 17 в соответствии с алгоритмом аварийной защиты и командами поступающими от АСУТП 30.
При закрытие крана в дистанционном режиме, ПЛК АСУ ТП 17 формирует управляющее воздействие на электромагнитный клапан закрытия крана в следующих ситуациях:
- поступление сигнала на закрытие крана с пульта управления производственно диспетчерской службы АСУ ТП 30;
- выдача обслуживающим персоналом команды на закрытие крана с терминала ПЖ АСУТП 17;
- выдача обслуживающим персоналом команды на закрытие крана с пульта управления крановым узлом шкафа управления 1;
- поступление сигнала на закрытие крана при возникновении аварийной ситуации вверх по потоку от АСУТП 30;
- возникновение аварийной ситуации на данном крановом узле, критериями появления которой являются:
а) поступление сигналов о понижении давления в газоконденсатопроводе ниже установленного значения от любых двух из трех датчиков давления проводящих измерения на данном крановом узле, а именно от датчика, подключенного к ПЛК АСУ ТП 17, от датчика 4, входящего в состав автоматизированного комплекса управления краном, и от электроконтактного манометра (далее - ЭКМ), подключенного к ПЛК АСУ ТП 17;
б) поступление сигналов о повышении давления в газоконденсатопроводе выше установленного значения от любых двух из трех датчиков давления, проводящих измерения на данном крановом узле, а именно от датчика, подключенного к ПЛК АСУ ТП 17, от датчика 4, входящего в состав автоматизированного комплекса управления краном, и от ЭКМ, подключенного к ПЖ АСУ ТП 17.
Аварийной ситуацией не будет считаться появление одного сигнала о понижении или повышении давления в газоконденсатопроводе за пределы установленных значений.
Данный случай интерпретируется как «нештатный», который может быть вызван гидратообразованием в вентильных сборках датчиков давления или неисправностью в их измерительных каналах.
В данных ситуациях ПЛК АСУТП 17 формирует информационный сигнал в АСУ ТП 30 и систему диагностики работоспособности оборудования автоматизации 31.
В случае отказа одного или более приборов контролирующих давление в газоконденсатопроводе (датчик давления и ЭКМ, подключенных к ПЛК АСУТП 17, и датчик давления 4, входящий в состав ПЛК автоматизированного комплекса управления краном 11), условие необходимости наличия двух аварийных сигналов отключается, и останов производится по сигналам любого из оставшихся исправных приборов.
Управляющее воздействие от ПЛК АСУ ТП 17 на электромагнитный клапан закрытия крана будет снято при поступлении сигнала от индуктивного сигнализатора конечного положения сигнализирующего о закрытие крана. Если по истечении 2-х минут после выдачи управляющей команды данный сигнал не поступает, ПЛК АСУ ТП 17 снимет управляющее воздействие, подаваемое на электромагнитный клапан закрытия крана, и по ВОЛС 20 выдает команду ПЛК автоматизированного комплекса управления краном 11 - «Закрыть кран», который в свою очередь формирует управляющее воздействие на электромагнитный клапан закрытия крана по проводной линии управления 12.
В случае отсутствия сигнала от индуктивного сигнализатора конечного положения сигнализирующего о закрытие крана по истечении 2-х минут после выдачи управляющей команды по ВОЛС 20 ПЛК автоматизированного комплекса управления краном 11 снимает управляющее воздействие, подаваемое на электромагнитный клапан закрытия крана, и по ВОЛС 20 передает сигнал в ПЛК АСУ ТП 17 об отказе управляющей системы привода крана газоконденсатопровода. Данная информация транслируется в систему диагностики 31 работоспособности оборудования автоматизации.
При открытии крана в дистанционном режиме, ПЛК АСУ ТП 17 формирует управляющее воздействие на электромагнитный клапан открытия крана в следующих ситуациях:
- поступление сигнала на открытие крана с пульта управления производственно диспетчерской службы АСУ ТП 30;
- выдача обслуживающим персоналом команды на открытие крана с терминала ПЖ АСУТП 17;
- выдача обслуживающим персоналом команды на открытие крана с пульта управления расположенного в шкафу управления 1.
Управляющее воздействие от ПЛК АСУ ТП 17 на электромагнитный клапан открытия крана будет снято при поступлении сигнала от индуктивного сигнализатора конечного положения сигнализирующего об открытие крана. Если по истечении 2-х минут после выдачи управляющей команды данный сигнал не поступает, ПЛК АСУ ТП 17 снимает управляющее воздействие, подаваемое на электромагнитный клапан открытия крана, и ВОЛС 20 выдает команду на ПЛК автоматизированного комплекса управления краном 11 - «Открыть кран» который в свою очередь формирует управляющее воздействие на электромагнитный клапан открытия крана по проводной линии управления 13.
В случае отсутствия сигнала от индуктивного сигнализатора конечного положения, сигнализирующего об открытии крана по истечении 2-х минут после выдачи управляющей команды, ПЛК автоматизированного комплекса управления краном 11 снимает управляющее воздействие, подаваемое на электромагнитный клапан открытия крана, и по ВОЛС 20 передает сигнал в ПЛК АСУ ТП 17 об отказе управляющей системы привода крана газоконденсатопровода. Данная информация транслируется в систему диагностики 31 работоспособности оборудования автоматизации.
2. Локальный автоматический режим управления
В локальный автоматический режим управления автоматизированный комплекс управления краном на газоконденсатопроводе переходит при следующих условиях:
- отказ связи между ПЛК АСУ ТП 17 и ПЛК автоматизированного комплекса управления краном 11 по сетевому протоколу в течение 30 секунд. При возобновлении связи, автоматизированный комплекс управления краном на газоконденсатопроводе автоматически переходит в «Дистанционный режим управления»;
- включение локального режима с терминала ПЛК АСУ ТП 17.
Переход в «дистанционный режим управления» также осуществляется с терминала ПЖ АСУ ТП 17.
В данном режиме:
- Автоматизированный комплекс управления краном на газоконденсатопроводе автономно формирует управляющее воздействие на электромагнитный клапан закрытия крана при поступлении от датчика давления 4, входящего в состав автоматизированного комплекса управления краном на газоконденсатопроводе, сигнала о понижении или повышении давления в газоконденсатопроводе за пределы установленных значений;
- ПЖ АСУ ТП 17 формирует управляющее воздействие на электромагнитный клапан закрытия крана по любому из двух сигналов, поступающих от датчика давления, подключенного к ПЛК АСУ ТП 17 или от ЭКМ (при понижении или повышении давления в газоконденсатопроводе за пределы установленных значений).
3. Ручной режим управления.
Ручной режим осуществляется посредством пульта управления расположенного в шкафу управления 1. Команды с пульта управления расположенного в шкафу управления 1 имеют приоритет в исполнении команд, при этом ПЛК автоматизированного комплекса управления краном 11 по ВОЛС 20 передает информацию о выполненных командах в ПЛК АСУ ТП 17, где эта информация храниться в истории событий.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ИНЖЕКЦИИ РАСТВОРА ИНГИБИТОРА КОРРОЗИИ ДЛЯ СКВАЖИН | 2017 |
|
RU2676779C2 |
| МНОГОУРОВНЕВАЯ РАСПРЕДЕЛЕННАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 2011 |
|
RU2456747C1 |
| ИНТЕРАКТИВНЫЙ ОБУЧАЮЩИЙ КОМПЛЕКС, ИМИТИРУЮЩИЙ РАБОТУ СКВАЖИНЫ | 2018 |
|
RU2675477C1 |
| ИНТЕРАКТИВНЫЙ ОБУЧАЮЩИЙ КОМПЛЕКС, ИМИТИРУЮЩИЙ РАБОТУ ГАЗОКОНДЕНСАТНОГО ПРОМЫСЛА | 2020 |
|
RU2758983C1 |
| СПОСОБ УПРАВЛЕНИЯ ФОНТАННОЙ АРМАТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2596175C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ АНАЛИТИЧЕСКАЯ СИСТЕМА КОМПЛЕКСНОЙ ОПТИМИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ РЕЖИМОВ СКВАЖИН | 2024 |
|
RU2838143C1 |
| Тренажерный комплекс для подготовки эксплуатационного персонала Автоматизированных систем управления технологическим процессом (АСУ ТП) | 2019 |
|
RU2699688C1 |
| СПОСОБ УПРАВЛЕНИЯ ФОНТАННОЙ АРМАТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2453683C1 |
| Автономная гибридная энергоустановка | 2022 |
|
RU2792410C1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ ИНГИБИТОРА КОРРОЗИИ И ГИДРАТООБРАЗОВАНИЯ | 2022 |
|
RU2804451C1 |

Изобретение относится к газодобывающей и нефтяной промышленности и может быть применено в области автоматизации для управления пневмоприводами и пневмогидроприводами шаровых кранов трубопроводов. Техническим результатом изобретения является повышение уровня безопасности и надежности автоматической системы управления краном за счет распределенного метода управления, основанного на применении локального контроллера в составе автоматизированного комплекса управления краном на газоконденсатопроводе, позволяющего управлять приводом крана дистанционно с автоматизированной системы управления технологическими процессами (АСУТП), дистанционно с терминала программно-логического контроллера (ПЛК) АСУТП, локально посредством ПЛК автоматизированного комплекса управления краном на газоконденсатопроводе в случае потери связи с АСУТП на основании измеренных значений давления, входящим в состав комплекса датчиком, а также дополнительно передавать в АСУТП значение давления в газоконденсатопроводе, значение давления газа управления, информацию о положении крана (открыт/закрыт) и диагностическую информацию об исправности датчика давления и индуктивных сигнализаторов положения крана. 1 ил.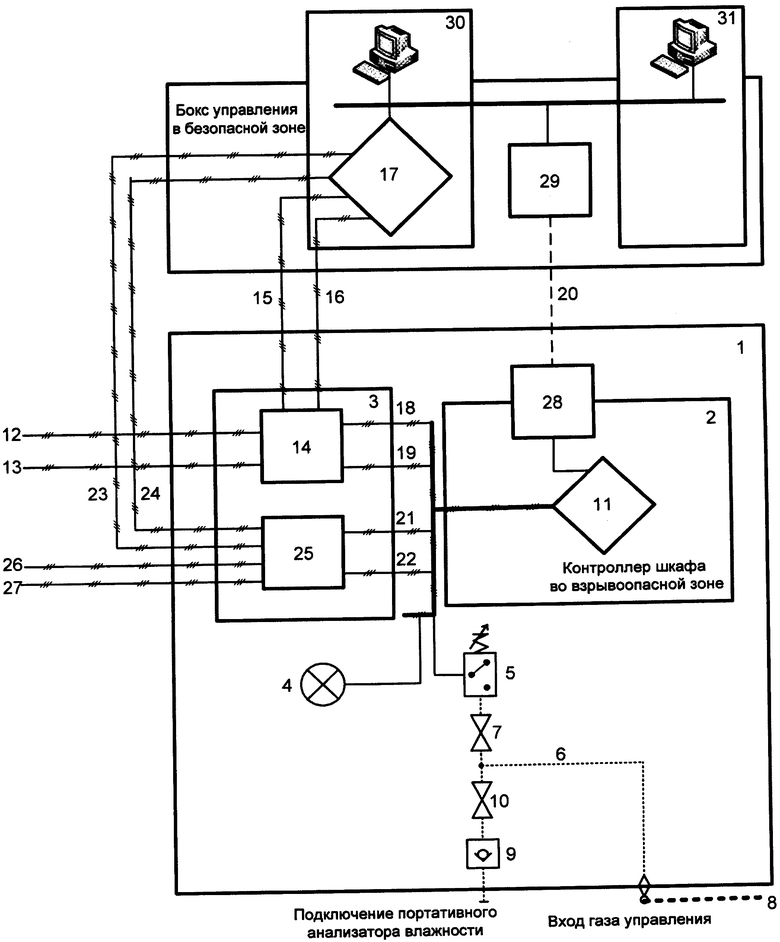
Автоматизированный комплекс управления краном на газоконденсатопроводе, включающий локальную систему управления, построенную на промышленном контроллере во взрывонепроницаемой оболочке, трубопроводы и запорную арматуру, отличающийся тем, что в состав автоматизированного комплекса управления краном на газоконденсатопроводе включены реле давления, датчик давления, быстроразъемное соединение, портативный анализатор влажности, оптическая линия связи, оборудование для подключения оптической линии к автоматизированной системе управления технологическими процессами, а также применена распределенная система управления, построенная на программно-логическом контроллере автоматизированной системы управления технологическими процессами и на локальном программно-логическом контроллере автоматизированного комплекса управления краном на газоконденсатопроводе, позволяющая дистанционно управлять положением крана, диагностировать состояние оборудования крана, а также в случае потери связи с автоматизированной системой управления технологическими процессами или программно-логическим контроллером автоматизированной системе управления технологическими процессами закрывать кран в случае аварийных ситуаций без участия персонала по алгоритмам аварийной защиты, заложенным в программно-логическом контроллере автоматизированного комплекса управления краном на газоконденсатопроводе.
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ШАРОВЫХ КРАНОВ | 2006 |
|
RU2330192C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ШАРОВЫХ КРАНОВ | 2004 |
|
RU2253762C1 |
| US 4437386 A, 20.03.1984 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2000 |
|
RU2171406C1 |

