Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и системам для обеспечения обратной связи о рабочих характеристиках транспортного средства. Указанные способы и системы могут быть особенно полезны в транспортных средствах, содержащих турбонагнетатель для улучшения рабочих характеристик двигателя.
Уровень техники/Раскрытие изобретения
Водитель может увеличить запрашиваемый крутящий момент для ускорения транспортного средства. Несмотря на то, что водитель может желать немедленного возрастания крутящего момента, силовая установка транспортного средства может достигать запрашиваемый крутящий момент в течение определенного времени. Например, в силовой установке, содержащей двигатель с турбонагнетателем, выходной крутящий момента может быть увеличен спустя несколько секунд после увеличения запрашиваемого водителем крутящего момента силовой установки. Отдача двигателя с турбонагнетателем может возрастать при увеличении скорости вращения компрессора турбонагнетателя, и достижение компрессором скорости, при которой обеспечивается требуемое форсирование двигателя, может занимать несколько секунд. Однако, отдача двигателя со временем может обеспечить запрашиваемый крутящий момент. Некоторые водители могут становиться нетерпеливыми и могут дополнительно увеличивать запрос крутящего момента в попытке быстрее добиться требуемого крутящего момента. Увеличение запрашиваемого крутящего момента может приводить к переходу трансмиссии на пониженную передачу для обеспечения запрашиваемого крутящего момента. В то же время, переход на пониженную передачу может снизить топливную экономичность транспортного средства и увеличить время недоступности переключения, хотя силовая установка, возможно, могла бы обеспечить требуемый крутящий момент без перехода на пониженную передачу, если бы транспортному средству перед началом переключения на пониженную передачу позволили несколько дольше разгоняться.
Авторы настоящего изобретения обнаружили указанную выше проблему и разработали способ передачи обратной связи водителю, содержащий: увеличение сопротивления нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки.
Посредством увеличения сопротивления нажатию в ответ на уменьшение разности доступного крутящего момента (т.е. максимального крутящего момента силовой установки при текущей скорости вращения силовой установки) и требуемого крутящего момента силовой установки, можно передать обратную связь водителю о том, что требуемый крутящий момент может привести к переходу трансмиссии на пониженную передачу, или что запрашиваемый крутящий момент может быть обеспечен, если водитель проявит немного терпения. Например, сопротивление нажатию на педаль акселератора может быть увеличено так, чтобы при увеличении запрашиваемого водителем крутящего момента силовой установки, и его приближении к доступному крутящему моменту силовой установки, водителю требовалось приложить больше усилия для запрашивания более высоких значений требуемого крутящего момента. В некоторых примерах сопротивление нажатию педали акселератора может быть дополнительно увеличено по мере приближения запрашиваемого водителем крутящего момента к такому крутящему моменту, при котором трансмиссия силовой установки переходит на пониженную передачу. Таким образом водитель может быть уведомлен о том, что при продолжении водителем увеличения запрашиваемого крутящего момента произойдет переход на пониженную передачу. В таком случае водитель может проявить терпение и снизить интенсивность увеличения запрашиваемого водителем крутящего момента силовой установки, или, как вариант, водитель может продолжить увеличение водительского запроса и ожидать переход трансмиссии на пониженную передачу для более интенсивного ускорения транспортного средства.
В других примерах сопротивление педали акселератора движению нажатия может быть увеличено в ответ на увеличение разности текущего крутящего момента силовой установки (т.е. действительного крутящего момента, выдаваемого силовой установкой) и требуемого крутящего момента силовой установки (т.е. крутящего момента, задаваемого, например, водителем). Посредством увеличения сопротивления нажатию педали акселератора движению нажатия в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки сопротивление нажатию педали акселератора может быть выборочно увеличено при таких условиях, когда текущий крутящий момент силовой установки отстает от требуемого крутящего момента силовой установки. Таким образом, водитель может быть уведомлен о том, что дополнительный крутящий момент силовой установки может быть обеспечен при текущем требуемом водителем крутящем моменте, если водитель проявит немного терпения.
Настоящее изобретение может обеспечивать несколько преимуществ. В частности, раскрытый подход может обеспечить снижение времени недоступности переключения передач. Кроме того, раскрытый подход может улучшить ощущения водителя от опыта вождения транспортного средства посредством обеспечения транспортным средством улучшенной обратной связи для водителя. Более того, такой подход может быть полезен для того, чтобы научить водителя лучше различать активное вождение и вождение с экономией топлива.
Описанные выше и другие преимущества, а также признаки настоящего изобретения станут очевидны из последующего подробного описания, рассматриваемого отдельно или совместно с прилагаемыми чертежами.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Оно не определяет ключевые или основные признаки, входящие в объем настоящего изобретения, который определен исключительно последующей формулой. Более того, объем изобретения не ограничен вариантами осуществления, в которых устранены какие-либо из недостатков, описанных выше или в любой части настоящего описания.
Краткое описание чертежей
Раскрытые в настоящей заявке преимущества должны быть более понятны при рассмотрении примера осуществления, упоминаемого в настоящей заявке как «Осуществление изобретения», отдельно или со ссылкой на чертежи, среди которых:
Фиг. 1 схематически представляет силовую установку транспортного средства, содержащую двигатель;
Фиг. 2А является примером графика переключения передач трансмиссии;
Фиг. 2В является примером графика кривых крутящего момента;
Фиг. 3 является графиком смоделированной последовательности вождения;
Фиг. 4 является блок-схемой алгоритма управления системы для обеспечения обратной связи для водителя; и
Фиг. 5 является примером способа обеспечения обратной связи для водителя о режиме работы транспортного средства.
Осуществление изобретения
Настоящее изобретение относится к обеспечению обратной связи для водителя транспортного средства о режиме работы транспортного средства. Транспортное средство может содержать силовую установку, содержащую двигатель, такой как показано на фиг. 1. Силовая установка, показанная на фиг. 1, содержит трансмиссию, которая имеет график переключения передач, такой как показан на фиг. 2А. Кроме того, силовая установка, показанная на фиг. 1, содержит двигатель, имеющий графики крутящего момента с наддувом и без наддува, такие как показаны на фиг. 2В. Силовая установка и педаль акселератора могут работать в соответствии с последовательностью работы, показанной на фиг. 3. Подача водителю информации о режиме работы транспортного средства может осуществляться так, как это иллюстрирует блок-схема фиг. 4. Способ обеспечения обратной связи для водителя о режиме работы транспортного средства посредством педали акселератора показан на фиг. 5.
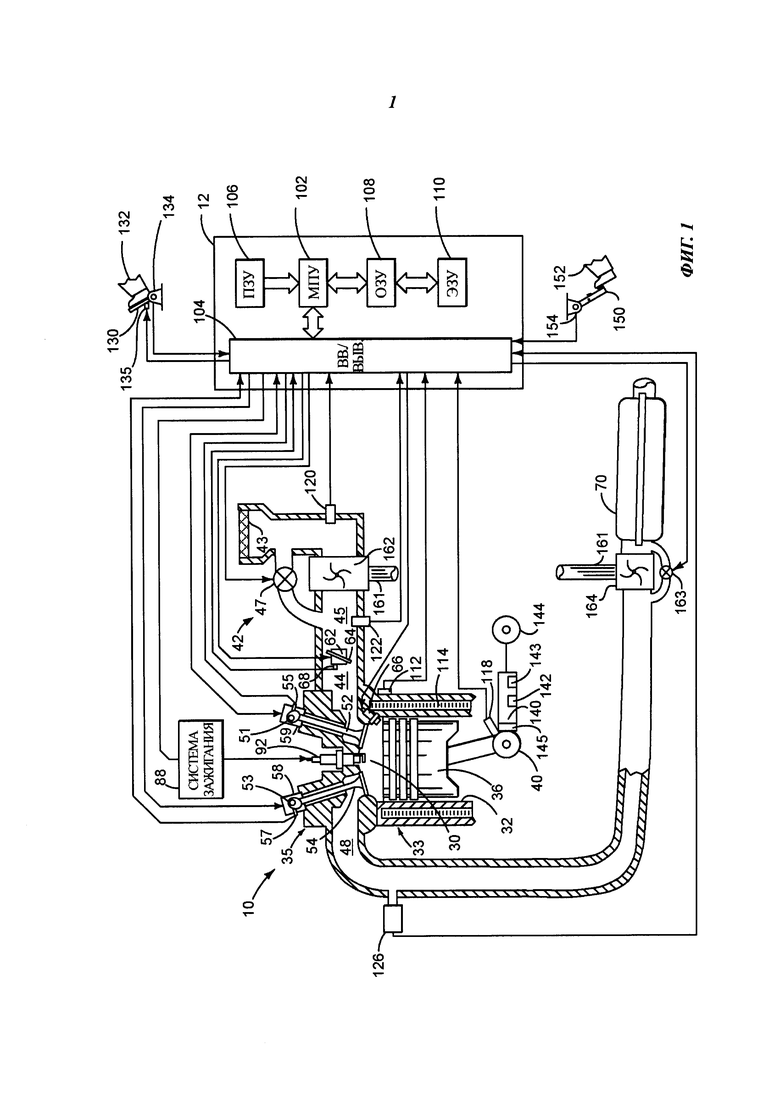
Как показано на фиг. 1, управление двигателем 10 внутреннего сгорания, содержащим несколько цилиндров, один из которых показан на фиг. 1, осуществляет электронный контроллер 12 двигателя. Двигатель 10 содержит головку 35 цилиндров и блок 33 цилиндров, который содержит камеру 30 сгорания и стенки 32 цилиндров. Поршень 36 расположен внутри них и совершает возвратно-поступательные движения за счет соединения с коленчатым валом 40. Камера 30 сгорания показана в коммуникации с впускным коллектором 44 и выпускным коллектором 48, соответственно, через впускной клапан 52 и выпускной клапан 54. Каждый впускной и выпускной клапан может иметь привод от кулачка 51 впускного клапана и кулачка 53 выпускного клапана. Положение кулачка 51 впускного клапана может быть определено посредством датчика 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может быть определено посредством датчика 57 кулачка выпускного клапана. Впускной клапан 52 может быть выполнен с возможностью выборочной активации или деактивации посредством устройства 59 активации клапанов. Выпускной клапан 54 может быть выполнен с возможностью выборочной активации или деактивации посредством устройства 58 активации клапанов. Устройства 58 и 59 активации клапанов могут быть электромеханическими устройствами.
Коленчатый вал 40 показан соединенным с преобразователем 145 крутящего момента, который входит в состав автоматической трансмиссии 140 (например, с фиксированными ступенями или бесступенчатой трансмиссии БТ (CVT)). Трансмиссия 140 может переключать передачи 142 для изменения отношения скоростей вращения двигателя 10 и колес 144 транспортного средства. Передачи 142 могут содержать множество передач с фиксированным передаточным отношением. Кроме того, трансмиссия 140 может содержать множество муфт 143 сцепления, которые могут быть при необходимости приведены в зацепление для активации множества фиксированных передач 142. В частности, посредством регулирования зацепления множества муфт 143 сцепления трансмиссия может быть переведена между повышенной передачей (то есть, передачей с более низким передаточным отношением) и пониженной передачей (то есть, передачей с более высоким передаточным отношением). Таким образом, изменение передаточного отношения позволяет обеспечить более низкий коэффициент трансформации крутящего момента трансмиссии при выборе более высокой передачи, и более высокий коэффициент трансформации крутящего момента трансмиссии при выборе более низкой передачи. Транспортное средство может иметь восемь возможных передач, причем передача трансмиссии номер восемь (восьмая передача трансмиссии) является высшей из возможных передач, и передача трансмиссии номер один (первая передача трансмиссии) является самой низшей из возможных передач. В других примерах транспортное средство может иметь более восьми или менее восьми возможных передач.
Ввод запрашиваемого водителем крутящего момента в контроллер 12 может осуществляться посредством педали 130 акселератора. Приводной механизм 135 тактильной обратной связи выборочно увеличивает и уменьшает величину усилия, требуемого для нажатия педали 130 акселератора (т.е., увеличения воздействия на педаль). Таким образом, приводной механизм 135 тактильной обратной связи выборочно обеспечивает повышенное или пониженное сопротивление движению педали 130 акселератора в ответ на команды контроллера 12.
Топливный инжектор 66 показан расположенным с возможностью впрыска топлива непосредственно в цилиндр 30, что известно специалистам в уровне техники как непосредственный впрыск. Топливный инжектор 66 осуществлять подачу жидкого топлива пропорциональна ширине импульсов контроллера 12. Подача топлива к топливному инжектору 66 осуществляется топливной системой (не показана), в состав которой входят топливный бак, топливный насос, и топливная рампа (не показаны). В одном из примеров для обеспечения более высоких значений давления топлива может быть использована двухступенчатая топливная система высокого давления.
Кроме того, впускной коллектор 44 показан в связанным с компрессором 162 турбонагнетателя и впускным отверстием 42 воздуха. Вал 161 механически соединяет турбину 164 турбонагнетателя с компрессором 162 турбонагнетателя. Электронный дроссель 62, являющийся необязательным, осуществляет регулирование положения дроссельной заслонки 64 с целью управления потоком воздуха от компрессора 162 к впускному коллектору 44. Давление в нагнетательной камере 45 можно считать давлением на входе дросселя, поскольку вход дросселя 62 расположен внутри нагнетательной камеры 45. Выход дросселя расположен во впускном коллекторе 44. В некоторых примерах дроссель 62 и дроссельная заслонка 64 могут быть расположены между впускным клапаном 52 и впускным коллектором 44, таким образом, что дроссель 62 является дросселем распределенного впрыска. Клапан 47 рециркуляции компрессора может быть выборочно переведен во множество положений между полностью открытым и полностью закрытым. Для обеспечения возможности выборочного прохождения отработавших газов мимо турбины 164 с целью регулирования скорости вращения компрессора 162 контроллер 12 может регулировать положение перепускного клапана 163. Воздушный фильтр 43 осуществляет очистку воздуха, поступающего во впускное отверстие 42 воздуха двигателя.
Система зажигания 88 без распределителя обеспечивает искру зажигания в камере сгорания 30 посредством искры 92 зажигания в ответ на сигнал контроллера 12. Универсальный датчик 126 кислорода отработавших газов УКОГ (UEGO) показан соединенным с выпускным коллектором 48 выше каталитического преобразователя 70 по потоку. В качестве альтернативы, датчик 126 УКОГ может быть заменен двухпозиционным датчиком кислорода отработавших газов.
В одном из примеров преобразователь 70 может содержать несколько каталитических блоков. В другом примере могут быть использованы несколько устройств снижения выбросов, каждый из которых содержит несколько блоков. В одном из примеров преобразователь 70 может быть трехкомпонентным каталитическим нейтрализатором.
Контроллер 12 показан на фиг. 1 в качестве традиционного микрокомпьютера, содержащего микропроцессорное устройство (МПУ) 102, порты 104 ввода/вывода, постоянное запоминающее устройство (ПЗУ) 106 (то есть, долговременную память), оперативное запоминающее устройство (ОЗУ) 108, энергонезависимое запоминающее устройство (ЭЗУ) 110 и шину данных традиционного типа. Контроллер 12 показан получающим различные сигналы отдатчиков, соединенных с двигателем 10, в том числе, в дополнение к вышеописанным примерам: температуру хладагента двигателя ТХД (ЕСТ) от датчика 112 температуры, соединенного с рукавом 114 охлаждения; датчика 134 положения, соединенного с педалью 130 акселератора для измерения силы нажатия, приложенной ногой 132, измеренное давление воздуха в коллекторе ДВК (MAP) от датчика давления 122, соединенного со впускным коллектором 44; сигнал положения двигателя от датчика 118 Холла, определяющего положение коленчатого вала 40; измеренную массу воздуха, поступающего в двигатель, от датчика 120; и измеренное положение дросселя от датчика 68. Также может осуществляться измерение барометрического давления (датчик не показан), которое обрабатывает контроллер 12. В предпочтительном аспекте настоящего изобретения датчик 118 положения двигателя вырабатывает за каждый оборот коленчатого вала заранее определенное количество электронных импульсов с равным интервалом, из которого может быть определена скорость вращения двигателя (число оборотов в минуту).
Во время работы каждый из цилиндров двигателя 10 обычно проходит цикл из четырех тактов: этот цикл содержит такт впуска, такт сжатия, такт расширения и такт выпуска. Во время такта впуска выпускной клапан 54 обычно закрывается, и открывается впускной клапан 52. Через впускной коллектор. 44 в камеру 30 сгорания поступает воздух, и поршень 36 движется в сторону нижней части цилиндра с увеличением объема камеры 30 сгорания. Положение, в котором поршень 36 находится рядом с нижней точкой цилиндра и в конце своего хода (то есть, при наибольшем объеме камеры 30 сгорания), специалистам в уровне техники обычно известен как нижняя мертвая точка НМТ (BDC).
При такте сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 движется в сторону головки цилиндра со сжатием воздуха в камере 30 сгорания. Положение, в котором поршень 36 находится в конце своего хода, ближайшем к головке цилиндра (например, при наименьшем объеме камеры 30 сгорания), специалистам в уровне техники обычно известен как верхняя мертвая точка ВМТ (TDC). В процессе, который в дальнейшем упоминается как сжатие, в камеру сгорания поступает топливо. В процессе, который в дальнейшем упоминается как зажигание, осуществляется воспламенение впрыснутого топлива посредством известных средств зажигания, таких как свеча 92 зажигания, в результате чего происходит сгорание.
При такте расширения расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует движение поршня в крутящий момент вращающегося вала. Наконец, во время такта выпуска выпускной клапан 54 открывается для высвобождения сгоревшей топливо-воздушной смеси в выпускной коллектор 48, и поршень возвращается в ВМТ. Следует отметить, что выше приведен лишь пример, и что моменты открытия и/или закрытия впускного и выпускного клапана могут быть изменены, например для обеспечения положительного или отрицательного перекрытия клапанов, позднего закрытия впускного клапана, или различных других примеров.
Таким образом, система фиг. 1 является системой, содержащей: педаль акселератора; силовую установку, содержащую двигатель; приводной механизм тактильной обратной связи для увеличения и уменьшения сопротивления нажатию педали акселератора; и контроллер, содержащий исполняемые команды, сохраненные в долговременной памяти, на увеличение сопротивления нажатию педали акселератора пропорционально уменьшению разности доступного крутящего момента силовой установки и прогнозируемого запрашиваемого водителем крутящего момента силовой установки. В качестве альтернативы, указанная система может содержать команды в долговременной памяти на увеличение сопротивления педали акселератора движению нажатия пропорционально увеличению разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки.
В некоторых примерах указанная система, кроме того, содержит дополнительные команды на задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на уменьшение разности доступного крутящего момента силовой установки и прогнозируемого запрашиваемого водителем крутящего момента силовой установки. В качестве альтернативы, система, кроме того, содержит дополнительные команды на задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки. В указанной системе, в том числе, упомянутое заранее определенное время может быть основано на скорости вращения двигателя и запрашиваемом водителем крутящем моменте силовой установки. Указанная система, кроме того, содержит дополнительные команды на переключение трансмиссии на пониженную передачу в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового. Указанная система, кроме того, содержит дополнительные команды на прекращение увеличения сопротивления нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового.
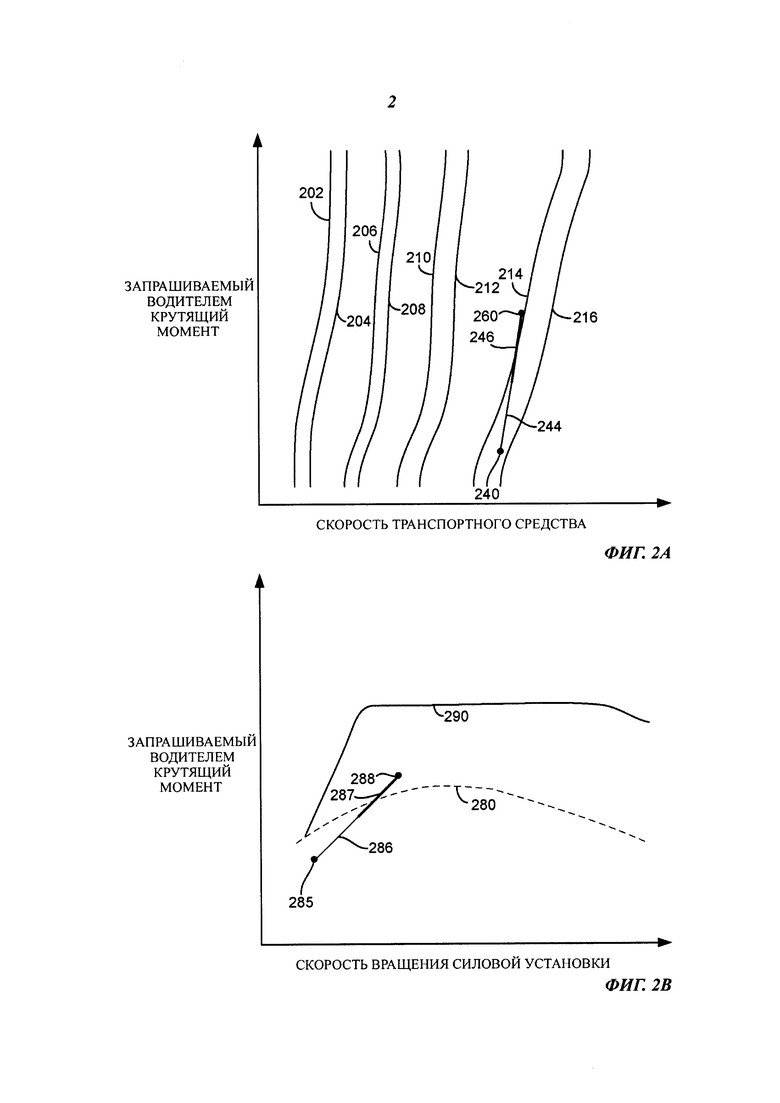
Фиг. 2А является примером графика переключения передач трансмиссии. В данном примере показаны кривые границ переключения пяти наборов передач. Кривые границ переключения основаны на скорости транспортного средства и требуемом крутящем моменте. Вертикальная ось отображает запрашиваемый водителем крутящий момент силовой установки. Запрашиваемый водителем крутящий момент силовой установки, в зависимости от варианта исполнения системы, может обозначать запрашиваемый крутящий момент двигателя или запрашиваемый крутящий момент, передаваемый на колеса. Запрашиваемый водителем крутящий момент силовой установки может также упоминаться как требуемый крутящий момент силовой установки, требуемый крутящий момент двигателя, запрашиваемый крутящий момент двигателя, запрашиваемый крутящий момент силовой установки, запрашиваемый крутящий момент, передаваемый на колеса, или требуемый крутящий момент, передаваемый на колеса, в зависимости от варианта исполнения системы. Запрашиваемый крутящий момент двигателя может быть определен на основе запрашиваемого крутящего момента, передаваемого на колеса, и наоборот. Горизонтальная ось отображает скорость транспортного средства.
Кривая 202 отображает условия работы транспортного средства для переключения вниз со второй передачи на первую передачу, при приближении к кривой 202 со стороны условий работы транспортного средства, соответствующих области справа от кривой 202. Например, если скорость транспортного средства снижается до скорости, которая меньше или равна скорости, отображаемой кривой 202, из области условий, в которой трансмиссия находится на второй передаче, и скорость транспортного средства соответствует области правее кривой 202, трансмиссия может быть автоматически переключена вниз на первую передачу.
Кривая 204 отображает условия работы транспортного средства для переключения вверх с первой передачи на вторую передачу, при приближении к кривой 204 со стороны условий работы транспортного средства, соответствующих области слева от кривой 204. Например, если скорость транспортного средства возрастает до скорости, которая больше или равна скорости, отображаемой кривой 204, из области условий, в которой трансмиссия находится на первой передаче, и скорость транспортного средства соответствует области левее кривой 204, трансмиссия может быть автоматически переключена вверх на вторую передачу.
Кривая 206 отображает условия работы транспортного средства для переключения вниз с третьей передачи на вторую передачу, при приближении к кривой 206 со стороны условий работы транспортного средства, соответствующих области справа от кривой 206. Например, если скорость транспортного средства снижается до скорости, которая меньше или равна скорости, отображаемой кривой 206, из области условий, в которой трансмиссия находится на третьей передаче, и скорость транспортного средства соответствует области правее кривой 206, трансмиссия может быть автоматически переключена вниз на вторую передачу.
Кривая 208 отображает условия работы транспортного средства для переключения вверх со второй передачи на третью передачу, при приближении к кривой 208 со стороны условий работы транспортного средства, соответствующих области слева от кривой 208. Например, если скорость транспортного средства возрастает до скорости, которая больше или равна скорости, отображаемой кривой 208, из области условий, в которой трансмиссия находится на второй передаче, и скорость транспортного средства соответствует области левее кривой 208, трансмиссия может быть автоматически переключена вверх на третью передачу.
Кривая 210 отображает условия работы транспортного средства для переключения вниз с четвертой передачи на третью передачу, при приближении к кривой 210 со стороны условий работы транспортного средства, соответствующих области справа от кривой 210. Например, если скорость транспортного средства снижается до скорости, которая меньше или равна скорости, отображаемой кривой 210, из области условий, в которой трансмиссия находится на четвертой передаче, и скорость транспортного средства соответствует области правее кривой 210, трансмиссия может быть автоматически переключена вниз на третью передачу.
Кривая 212 отображает условия работы транспортного средства для переключения вверх со второй передачи на третью передачу, при приближении к кривой 212 со стороны условий работы транспортного средства, соответствующих области слева от кривой 212. Например, если скорость транспортного средства возрастает до скорости, которая больше или равна скорости, отображаемой кривой 212, из области условий, в которой трансмиссия находится на третьей передаче, и скорость транспортного средства соответствует области левее кривой 212, трансмиссия может быть автоматически переключена вверх на четвертую передачу.
Кривая 214 отображает условия работы транспортного средства для переключения вниз с пятой передачи на четвертую передачу, при приближении к кривой 214 со стороны условий работы транспортного средства, соответствующих области справа от кривой 214. Например, если скорость транспортного средства снижается до скорости, которая меньше или равна скорости, отображаемой кривой 214, из области условий, в которой трансмиссия находится на пятой передаче, и скорость транспортного средства соответствует области правее кривой 214, трансмиссия может быть автоматически переключена вниз на четвертую передачу.
Кривая 216 отображает условия работы транспортного средства для переключения вверх с четвертой передачи на пятую передачу, при приближении к кривой 216 со стороны условий работы транспортного средства, соответствующих области слева от кривой 216. Например, если скорость транспортного средства возрастает до скорости, которая больше или равна скорости, отображаемой кривой 216, из области условий, в которой трансмиссия находится на четвертой передаче, и скорость транспортного средства соответствует области левее кривой 216, трансмиссия может быть автоматически переключена вверх на пятую передачу.
Таким образом, может осуществляться такое переключение передач автоматической трансмиссии, что двигатель или электродвигатель могут оставаться в желаемом рабочем диапазоне (т.е. между нижней и верхней границами скорости и между нижней и верхней границами крутящего момента), в котором работа силовой установки эффективна и обеспечивает требуемую отдачу.
Фиг. 2А также изображает один из примеров того, как может осуществляться регулирование сопротивления нажатию педали акселератора для обеспечения обратной связи для водителя о режиме работы транспортного средства. Если водитель нажимает педаль акселератора для увеличения запрашиваемого крутящего момента от условий 240 к условиям 260, сопротивление педали акселератора нажатию (т.е. сопротивление движению в направлении увеличения нажатия) увеличивают с первой интенсивностью, как показано отрезком 244. Однако, если запрашиваемый крутящий момент находится в пределах порогового значения крутящего момента кривой 214 переключения передачи вниз, сопротивление педали акселератора движению увеличивают со второй интенсивностью, причем вторая интенсивность выше первой интенсивности, как показано отрезком 246. Увеличение сопротивления педали акселератора движению дает водителю понять, что при продолжении увеличения запрашиваемого крутящего момента неизбежно переключение трансмиссии на пониженную передачу. Поэтому водитель может принять решение о снижении интенсивности увеличения запрашиваемого крутящего момента для того, чтобы избежать переключение трансмиссии на пониженную передачу, что может способствовать повышению топливной экономичности транспортного средства. В качестве альтернативы, водитель может принять решение продолжать запрашивать крутящий момент с той же или более высокой интенсивностью для того, чтобы спровоцировать понижение передачи трансмиссии для более быстрого ускорения транспортного средства. Таким образом, педаль акселератора обеспечивает водителю обратную связь о том, является ли понижение передачи неизбежным или нет.
Фиг. 2А является примером графика крутящего момента, выдаваемого силовой установкой. В данном примере показан выходной крутящий момент двигателя для работы в форсированном режиме (например, с турбонагнетателем) и в нефорсированном режиме (например, в котором турбонагнетатель подает во впускное отверстие воздуха двигателя такое количество воздуха под давлением, которое ниже порогового значения). Кривая 280 отображает выходной крутящий момент двигателя в нефорсированном режиме работы. Кривая 290 отображает выходной крутящий момент двигателя в форсированном режиме работы. Двигатель работает в форсированном режиме для обеспечения крутящего момента, соответствующего области между кривыми 280 и 290. Двигатель работает в нефорсированном режиме для обеспечения крутящего момента, соответствующего области ниже кривой 290. Выходной крутящий момент в форсированном режиме существенно выше, чем при работе в нефорсированном режиме, но при работе в форсированном режиме может быть снижена топливная экономичность двигателя. Кривые крутящего момента, вырабатываемого силовой установкой, соответствующие крутящему моменту, подаваемому на колеса, имеют аналогичную форму для работы в форсированном и нефорсированном режимах.
Фиг. 2В также изображает один из примеров того, как может осуществляться регулирование сопротивления нажатию педали акселератора для обеспечения обратной связи для водителя о режиме работы транспортного средства. Если водитель нажимает педаль акселератора для увеличения запрашиваемого крутящего момента от рабочих условий 285 к условиям 288, сопротивление педали акселератора нажатию (т.е. сопротивление движению в направлении увеличения нажатия) увеличивают с первой интенсивностью, как показано отрезком 286. Однако, если запрашиваемый крутящий момент находится в пределах порогового значения крутящего момента кривой 280 нефорсированного режима, сопротивление педали акселератора увеличивают со второй интенсивностью, причем вторая интенсивность выше первой интенсивности, как показано отрезком 287. Увеличение сопротивления нажатию педали акселератора дает водителю понять, что при продолжении увеличения запрашиваемого крутящего момента двигатель перейдет в форсированный режим работы. Поэтому водитель может принять решение о снижении интенсивности увеличения запрашиваемого крутящего момента для того, чтобы избежать перехода в форсированный режим, что может способствовать повышению топливной экономичности транспортного средства. В качестве альтернативы, водитель может принять решение продолжать запрашивать крутящий момент с той же или более высокой интенсивностью для того, чтобы спровоцировать переход в форсированный режим работы для более быстрого ускорения транспортного средства. Таким образом, педаль акселератора обеспечивает водителю обратную связь о том, является ли неизбежной работа в форсированном режиме (т.е. сжатие воздуха, подаваемого во впускное отверстие воздуха двигателя, выше атмосферного давления).
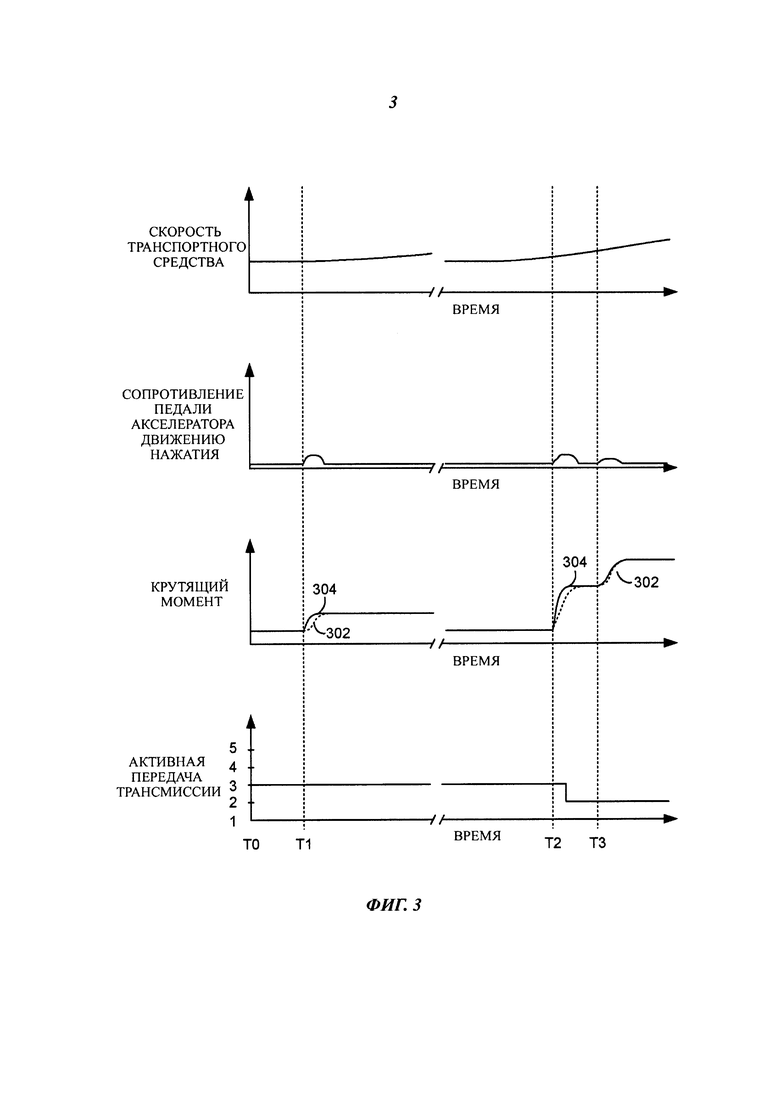
На фиг. 3 показан график смоделированной последовательности вождения. Последовательность вождения на фиг. 3 может быть обеспечена системой фиг. 1, функционирующей в соответствии со способом фиг. 5. Вертикальные отметки Т0-Т3 обозначают характерные моменты времени в течение этой последовательности. Разрывы временной шкалы обозначены двумя косыми чертами «//», и интервал времени между этими чертами может быть длинным или коротким.
Первый график сверху на фиг. 3 является графиком скорости транспортного средства во времени. Вертикальная ось является осью скорости транспортного средства, и скорость транспортного средства возрастает в направлении стрелки вертикальной оси. Горизонтальная ось является осью времени, и время увеличивается на графике слева направо.
Второй график сверху на фиг. 3 является графиком изменения сопротивления движению педали акселератора во времени. Вертикальная ось является осью сопротивления движению педали акселератора (например, в Нм/градус), и сопротивление движению педали акселератора возрастает в направлении стрелки вертикальной оси. Горизонтальная ось является осью времени, и время увеличивается на графике слева направо.
Третий график сверху на фиг. 3 является графиком изменения крутящего момента во времени. Вертикальная ось является осью крутящего момента, и крутящий момент возрастает в направлении стрелки вертикальной оси. Горизонтальная ось является осью времени, и время увеличивается на графике слева направо. Пунктирной линией 302 обозначен текущий крутящий момент силовой установки (например, крутящий момент двигателя или крутящий момент, подаваемый на колеса), определенный, например, на основе скорости вращения двигателя и давления во впускном коллекторе. Сплошной линией 304 обозначен требуемый крутящий момент силовой установки, или запрашиваемый водителем крутящий момент силовой установки, который определяют на основании положения педали акселератора. Текущий крутящий момент силовой установки и запрашиваемый водителем крутящий момент силовой установки равны, если видна только сплошная линия 304.
Четвертый график сверху на фиг. 3 является графиком изменения передачи трансмиссии во времени. Вертикальная ось является осью передач трансмиссии, и соответствующие передачи трансмиссии обозначены на вертикальной оси. Горизонтальная ось является осью времени, и время увеличивается на графике слева направо.
В момент Т0 скорость транспортного средства находится на среднем уровне, и сопротивление педали акселератора на низком уровне. Запрашиваемый водителем крутящий момент находится на низком уровне, и трансмиссия работает на третьей передаче.
В момент Т1 водитель нажимает (то есть вдавливает) педаль акселератора для увеличения запрашиваемого крутящего момента и ускорения транспортного средства. Запрашиваемый водителем крутящий момент силовой установки увеличивается быстрее, нежели текущий крутящий момент силовой установки, поскольку поднятие давления во впускном коллекторе турбонагнетателем, и повышение крутящего момента двигателя, могут требовать времени. Трансмиссия остается на третьей передаче, поскольку запрашиваемый крутящий момент увеличивается менее, чем на величину, при которой инициируется переключение на передачу ниже. Транспортное средство ускоряется и давление наддува двигателя (не показано) увеличивается, что приводит к увеличению отдачи двигателя. Увеличение сопротивления нажатию педали акселератора обеспечивает водителю обратную связь о том, что форсирование активировано и используется для ускорения транспортного средства. Сопротивление педали акселератора движению снижается по мере уменьшения разности между текущим крутящим моментом силовой установки и запрашиваемым водителем крутящим моментом силовой установки. Между моментами Т1 и Т2 рабочая последовательность прерывается, что обозначено двойной косой чертой.
В момент Т2 водитель нажимает на педаль акселератора во второй раз, находясь в тех же условиях работы, что и в момент Т1. Однако, водитель нажимает акселератора дальше, чем в момент Т1, увеличивая тем самым текущий крутящий момент силовой установки и запрашиваемый водителем крутящий момент силовой установки до более высоких уровней, нежели в момент Т1. Сопротивление педали акселератора движению увеличивают с первой интенсивностью, и, затем, увеличивают с более высокой второй интенсивностью. Первая интенсивность обеспечивает указание водителю на то, что осуществляется увеличение форсирования для достижения запрашиваемого водителем крутящего момента силовой установки. Вторая интенсивность обеспечивает указание водителю на то, что если этот крутящий момент продолжит увеличиваться, неизбежно переключение передачи вниз. Вскоре после этого трансмиссию переключают вниз на вторую передачу для ускорения набора скорости транспортным средством. Сопротивление педали акселератора движению снижается по мере уменьшения разности между текущим крутящим моментом силовой установки и запрашиваемым водителем крутящим моментом силовой установки.
В момент Т3 водитель увеличивает запрашиваемый водителем крутящий момент силовой установки в третий раз, но в этот раз трансмиссия уже переключена вниз на вторую передачу и турбонагнетатель уже обеспечивает некоторое форсирование. Поэтому сопротивление педали акселератора движению увеличивают только на небольшую величину. Трансмиссия остается на второй передаче и транспортное средство продолжает ускоряться.
Таким образом, педаль акселератора может обеспечивать тактильную обратную связь для водителя о характеристиках производительности транспортного средства, таких как активация форсирования и переключение передачи вниз. В дополнение к этому педаль акселератора может обеспечивать различные уровни или интенсивности тактильной обратной связи для обеспечения различий между факторами, влияющими на производительности транспортного средства.
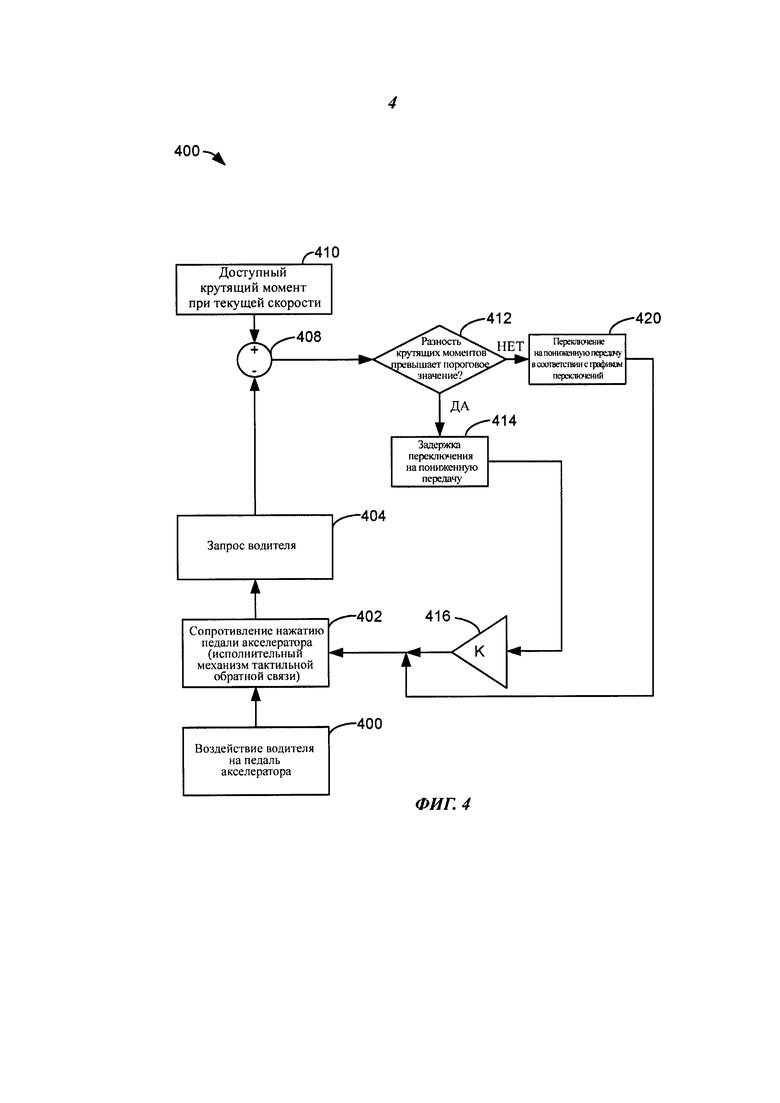
На фиг. 4 изображена блок-схема системы управления, обеспечивающей тактильную обратную связь о производительности транспортного для водителя. Указанная система управления может быть частью системы, показанной на фиг. 1.
В блоке 400 осуществляется прием системой управления сигналов от водителя посредством педали акселератора. Педаль акселератора содержит устройство тактильной обратной связи для увеличения сопротивления движению педали акселератора от начального положения при увеличении значения положения педали акселератора (т.е. ее нажатии). Устройство тактильной обратной связи обеспечивает возможность возвращения педали акселератора в начальное положение с интенсивностью, не зависящей от сопротивления движению педали акселератора.
В блоке 402 указанная система осуществляет регулирование сопротивления нажатию педали акселератора движению педали акселератора в зависимости от разности между доступным крутящим моментом силовой установки и требуемым крутящим моментом силовой установки. В качестве альтернативы, указанная система осуществляет регулирование сопротивления педали акселератора движению педали акселератора в зависимости от разности между текущим крутящим моментом силовой установки (т.е. крутящим моментом, выдаваемым силовой установкой) и требуемым крутящим моментом силовой установки или запрашиваемым водителем крутящим моментом силовой установки, как показано на фиг. 3. В некоторых примерах в блоке 402 может осуществляться регулирование сопротивления педали акселератора движению педали акселератора в зависимости от разности между доступным крутящим моментом силовой установки и прогнозируемым требуемым крутящим моментом силовой установки. В качестве альтернативы, в блоке 402 может осуществляться регулирование сопротивления педали акселератора движению педали акселератора в зависимости от разности между требуемым крутящим моментом силовой установки, или запрашиваемым водителем крутящим моментом силовой установки, и прогнозируемым текущим крутящим моментом силовой установки. Прогнозируемый текущий крутящий момент силовой установки может быть определен так, как раскрыто более подробно в описании фиг. 5. Текущий крутящий момент силовой установки может быть выходным крутящим моментом двигателя, крутящим моментом рабочего колеса преобразователя крутящего момента, крутящим моментом, подводимым к колесам, или другим крутящим моментом силовой установки или трансмиссии. В блоке 402 может осуществляться дополнительное регулирование сопротивления педали акселератора движению в ответ на нахождение требуемого крутящего момента силовой установки в пределах порогового значения крутящего момента трансмиссии, соответствующего графику переключения передач. В блоке 402 может осуществляться дополнительное регулирование сопротивления педали акселератора движению в ответ на нахождение требуемого крутящего момента силовой установки в пределах порогового значения крутящего момента, соответствующих началу работы двигателя в форсированном режиме (т.е. при создании во впускном коллекторе двигателя положительного давления).
В блоке 404 система управления преобразует положение педали акселератора в запрашиваемый водителем крутящий момент силовой установки или требуемый крутящий момент силовой установки. Запрашиваемый крутящий момент силовой установки может быть крутящим моментом двигателя, крутящим моментом рабочего колеса преобразователя крутящего момента, или другим крутящим моментом силовой установки или трансмиссии. Блок 404 может содержать передаточную функцию, которая связывает положение педали акселератора и скорость транспортного средства с запрашиваемым водителем крутящим моментом. Выход блока 404 является входом для блока 406.
В блоке 410 способ определяет крутящий момент, доступный при текущей скорости силовой установки. Если требуемый запрашиваемый крутящий момент является требуемым крутящим моментом двигателя или рабочего колеса преобразователя крутящего момента, в блоке 410 доступный крутящий момент может быть определен как максимальный крутящий момент двигателя при текущей скорости вращения двигателя (то есть крутящий момент двигателя при полностью открытом дросселе с активированным форсированием и подачей сжатого воздуха во впускной коллектор двигателя). Максимальный крутящий момент двигателя может быть определен эмпирически, и сохранен в виде таблиц или функций в зависимости от скорости вращения двигателя. Если требуемый запрашиваемый крутящий момент является требуемым крутящим моментом, подводимым к колесам, доступным крутящим моментом является максимальный крутящий момент, подводимый к колесам, при текущей скорости вращения колес, работе трансмиссии на текущей передаче, работе двигателя при полностью открытом дросселе с активированным форсированием и подачей сжатого воздуха во впускной коллектор двигателя. Максимальный крутящий момент, подводимый к колесам, может быть определен эмпирически, и сохранен в виде таблиц или функций в зависимости от скорости вращения колес, выбранной передачи трансмиссии и состояния преобразователя крутящего момента.
В точке 408 суммирования требуемый крутящий момент силовой установки вычитают из доступного крутящего момента силовой установки для вычисления разности крутящих моментов. Разность крутящих моментов передается на блок 412, в котором определяют, превышает ли разность крутящих моментов одно или несколько пороговых значений. В одном из примеров пороговое значение разности указывает на то, что требуемый крутящий момент силовой установки приближается к крутящему моменту, соответствующему переключению трансмиссии на пониженную передачу. В другом примере пороговое значение разности указывает на то, что требуемый крутящий момент силовой установки приближается от условий, в которых двигатель не работает в форсированном режиме, к крутящему моменту, при котором двигатель работает в форсированном режиме. Если разность крутящих моментов превышает пороговое значение, ответ положительный, и разность крутящих моментов передают в блок 414. В противном случае, алгоритм управления переходит к блоку 420.
В качестве альтернативы, блок 406 может отсутствовать, и вместо этого может быть определен текущий крутящий момент силовой установки в блоке 410. Например, текущий крутящий момент силовой установки может быть определен на основе скорости вращения двигателя и давления во впускном коллекторе. Более конкретно, на основе скорости вращения двигателя и давления во впускном коллекторе составлена таблица определенных эмпирически значений выходного крутящего момента двигателя. Полученное из этой таблицы значение крутящего момента является значением текущего крутящего момента. В точке 408 суммирования текущий крутящий момент силовой установки может быть вычтен из требуемого крутящего момента силовой установки или запрашиваемого водителем крутящего момента силовой установки. Полученная разность крутящих моментов передается на блок 412. Если в блоке 412 определено, что разность крутящих моментов превышает пороговое значение, ответ положительный, и разность крутящих моментов передают в блок 414. В противном случае, алгоритм управления переходит к блоку 420.
В блоке 414 осуществляется задержка переключения трансмиссии вниз, с тем, чтобы дать турбонагнетателю время для обеспечения требуемого крутящего момента, и снизить расход топлива. Алгоритм управления переходит к блоку 412, и полученная разность крутящих моментов передается на блок 412.
В блоке 412 для определения величины регулирования тактильной обратной связи педали акселератора к разности требуемого или прогнозируемого запрашиваемого водителем крутящего момента силовой установки и доступного крутящего момент применяют коэффициент усиления пропорциональной составляющей. Регулировка тактильной обратной связи педали акселератора увеличивает или уменьшает сопротивление педали акселератора движению. В одном из примеров по мере уменьшения разности крутящих моментов сопротивление педали акселератора движению увеличивается. Упомянутую регулировку сопротивления педали акселератора тактильной обратной связи педали акселератора движению применяют в блоке 402.
В качестве альтернативы, в блоке 416 для определения величины регулирования тактильной обратной связи педали акселератора коэффициент усиления пропорциональной составляющей применяют к разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки. В одном из примеров по мере увеличения упомянутой разности крутящих моментов сопротивление педали акселератора движению увеличивается. Упомянутую регулировку сопротивления педали акселератора тактильной обратной связи педали акселератора движению применяют в блоке 402.
В блоке 420 способ 400 переключает трансмиссию на передачу вниз на основе графика переключения на пониженную передачу трансмиссии (например, такого как показан на фиг. 2). Переключение передачи вниз может обеспечить дополнительное увеличение скорости разгона транспортного средства. После осуществления переключения на пониженную передачу алгоритм управления возвращается к блоку 402.
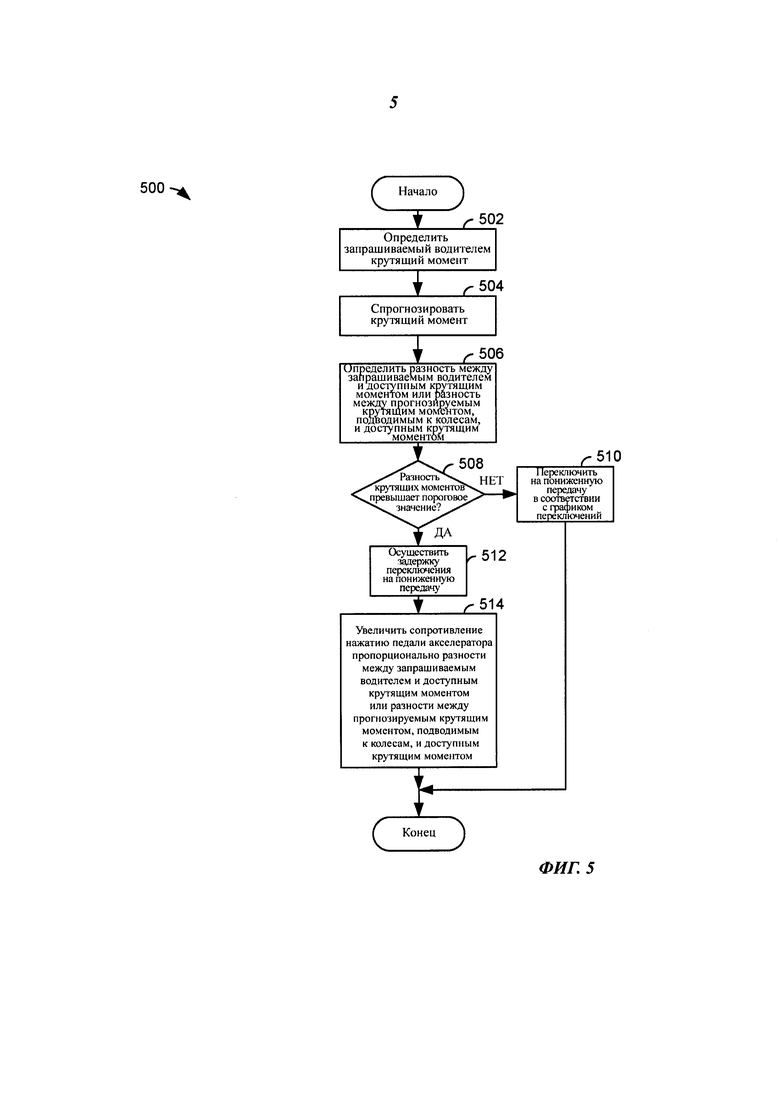
На фиг. 5 изображен способ обеспечения тактильной обратной связи о производительности транспортного для водителя. Указанный способ может быть предусмотрен в системе фиг. 1 в виде исполнимых инструкций, сохраненных в долговременной памяти. Кроме того, способ фиг. 5 может обеспечивать алгоритм работы, представленный на фиг. 4.
На этапе 502 способа 400 определяют запрашиваемый водителем крутящий момент силовой установки. Запрашиваемый крутящий момент силовой установки может быть запрашиваемым крутящим моментом двигателя, крутящим моментом, подводимым к колесам, крутящим моментом рабочего колеса преобразователя крутящего момента, или другим крутящим моментом силовой установки или трансмиссии. В одном из примеров запрашиваемый водителем крутящий момент определяют на основе положения педали акселератора и скорости транспортного средства. На основе положения педали акселератора и скорости транспортного средства посредством передаточной функции определяют запрашиваемый водителем крутящий момент силовой установки. После определения запрашиваемого водителем крутящего момента способ 500 переходит к этапу 504.
На этапе 504 способа 500 определяют прогнозируемый текущий крутящий момент силовой установки. В одном из примеров прогнозирование текущего крутящего момента силовой установки осуществляют на основе запрашиваемого водителем крутящего момента силовой установки. Более конкретно, запрашиваемый водителем крутящий момент силовой установки пропускают через модель двигателя. В одном из примеров выработка крутящего момента силовой установки может быть смоделирована посредством пропускания запрашиваемого водителем крутящего момента силовой установки через низкочастотный фильтр. Коэффициент этого фильтра может регулироваться на основе скорости вращения двигателя и/или других параметров силовой установки. После определения прогнозируемого текущего крутящего момента способ 500 переходит к этапу 506.
На этапе 506 способа 500 определяют разность между запрашиваемым водителем крутящим моментом силовой установки и доступным крутящим моментом. В качестве альтернативы, на этапе 506 определяют разность между прогнозируемым текущим крутящим моментом силовой установки и доступным крутящим моментом. Если запрашиваемый водителем крутящий момент силовой установки является выходным крутящим моментом двигателя, доступный крутящий момент определяют на основе выходного крутящего момента двигателя. Аналогично, если запрашиваемый водителем крутящий момент силовой установки является крутящим моментом, подводимым к колесам, доступный крутящий момент определяют на основе выходного крутящего момента двигателя, подводимого к колесам. Крутящий момент, подводимый к колесам, может быть определен на основе крутящего момента двигателя, и наоборот. Например, крутящий момент двигателя может быть преобразован в крутящий момент, подводимый к колесам, посредством определения крутящего момента двигателя на основе скорости вращения двигателя и величины воздушного потока, затем умножения крутящего момента двигателя на текущее передаточное отношение трансмиссии, передаточное число главной передачи, коэффициент полезного действия трансмиссии, и коэффициент трансформации крутящего момента (например, 1 для заблокированного преобразователя крутящего момента).
Если требуемый запрашиваемый крутящий момент является требуемым крутящим моментом двигателя или рабочего колеса преобразователя крутящего момента, доступный крутящий момент может быть определен как максимальный крутящий момент двигателя при текущей скорости вращения двигателя (то есть крутящий момент двигателя при полностью открытом дросселе с активированным форсированием и подачей сжатого воздуха во впускной коллектор двигателя). Максимальный крутящий момент двигателя может быть определен эмпирически, и сохранен в виде таблиц или функций в зависимости от скорости вращения двигателя. С другой стороны, если требуемый запрашиваемый крутящий момент является требуемым крутящим моментом, подводимым к колесам, доступным крутящим моментом является максимальный крутящий момент, подводимый к колесам, при текущей скорости вращения колес, работе трансмиссии на текущей передаче, работе двигателя при полностью открытом дросселе с активированным форсированием и подачей сжатого воздуха во впускной коллектор двигателя. Максимальный крутящий момент, подводимый к колесам, может быть определен эмпирически, и сохранен в виде таблиц или функций в зависимости от скорости вращения колес, выбранной передачи трансмиссии и состояния преобразователя крутящего момента, или он может быть определен путем обратных вычислений посредством умножения максимального крутящего момента двигателя при текущей скорости вращения двигателя на передаточное отношение трансмиссии, коэффициент полезного действия трансмиссии, передаточное отношение главной передачи, и коэффициент трансформации крутящего момента преобразователя крутящего момента. Для определения разности крутящих моментов способ 500 вычитает запрашиваемый водителем крутящий момент силовой установки или прогнозируемый запрашиваемый водителем крутящий момент силовой установки из доступного крутящего момента. После определения разности крутящих моментов способ 500 переходит к этапу 508.
В качестве альтернативы, на этапе 506 способа 500 определяют разность между текущим крутящим моментом силовой установки и требуемым крутящим моментом силовой установки, или разность между прогнозируемым текущим крутящим моментом силовой установки и требуемым крутящим моментом силовой установки. Более конкретно, для определения разности крутящих моментов текущий крутящий момент силовой установки вычитают из требуемого крутящего момента силовой установки, или прогнозируемый текущий крутящий момент силовой установки вычитают из требуемого крутящего момента силовой установки.
На этапе 508 способа 500 определяют, превышает ли разность, определенная на этапе 506, одно или несколько пороговых значений. В одном из примеров пороговое значение разности указывает на то, что требуемый крутящий момент или прогнозируемый крутящий момент приближается к крутящему моменту, соответствующему переключению трансмиссии на пониженную передачу. В другом примере пороговое значение разности указывает на то, что требуемый крутящий момент или прогнозируемый крутящий момент приближается от условий, в которых двигатель не работает в форсированном режиме, к крутящему моменту, при котором двигатель работает в форсированном режиме. За счет того, что упомянутые пороговые значения основаны на пороговых значениях крутящего момента, соответствующих крутящему моменту переключения вниз трансмиссии и/или пороговых значениях крутящего момента, соответствующих крутящему моменту, при котором осуществляется переход от работы двигателя в нефорсированном режиме к форсированному режиму, может быть обеспечено регулирование сопротивления педали акселератора движению педали акселератора для обеспечения обратной связи о режиме работы двигателя для водителя. Если в способе 500 определено, что разность крутящих моментов превышает пороговое значение, способ 500 переходит в соответствии с ответом «да» к этапу 512. В противном случае, ответ «нет» и способ 500 переходит к этапу 510.
На этапе 512 способ 500 содержит задержку переключения на пониженную передачу трансмиссии. Переключение на пониженную передачу трансмиссии может быть задержано на заранее определенное время в том случае, если разность крутящих моментов более чем на заранее определенную величину крутящего момента выше, чем при переключении на пониженную передачу трансмиссии. Указанное заранее определенное время может быть основано на скорости вращения двигателя и запрашиваемом водителем крутящем моменте силовой установки, таким образом, чтобы выдаваемый двигателем крутящий момент мог быть увеличен до переключения передачи вниз, для того, чтобы водитель мог почувствовать возрастающий крутящий момент, обеспечиваемый турбонагнетателем. После завершения этапа 512 способ 500 переходит к этапу 514.
На этапе 514 способа 500 увеличивают сопротивления педали акселератора в ответ на движение педали акселератора. В одном из примеров, напряжение или ток, подаваемые на устройство управления тактильной обратной связью сопротивления нажатию педали акселератора регулируют пропорционально разности между запрашиваемым водителем крутящим моментом силовой установки или прогнозируемым текущим крутящим моментом силовой установки и доступным крутящим моментом. Дополнительно, или в качестве альтернативы, регулирование сопротивления нажатию педали акселератора движению педали акселератора может быть осуществлено в ответ на то, что крутящий момент находится в пределах порогового значения крутящего момента, соответствующих началу работы двигателя в форсированном режиме. Дополнительно, или в качестве альтернативы, регулирование сопротивления педали акселератора движению педали акселератора может быть осуществлено в ответ на то, что крутящий момент находится в пределах порогового значения крутящего момента, при которых инициируется переключение на пониженную передачи передачу трансмиссии. Интенсивность сопротивления нажатию педали акселератора может быть выше при приближении крутящего момента к такому, при котором трансмиссия переходит на передачу ниже, по сравнению с сопротивлением нажатию педали акселератора при приближении крутящего момента к такому, при котором начинается работа двигателя в форсированном режиме. Таким образом, могут быть предусмотрены различные интенсивности сопротивления нажатию педали акселератора для различных характеристик работы транспортного средства, и водитель может отличать на основе различных интенсивностей сопротивления нажатию педали акселератора условия, соответствующие различным рабочим характеристикам. После этапа 514 способ 500 завершается.
В качестве альтернативы, на этапе 514 способа 500 сопротивление педали акселератора движению увеличивают пропорционально разности между текущим крутящим моментом силовой установки или прогнозируемым текущим крутящим моментом силовой установки и запрашиваемым водителем крутящим моментом силовой установки. Дополнительно, или в качестве альтернативы, регулирование сопротивления педали акселератора движению педали акселератора может быть осуществлено в ответ на то, что крутящий момент находится в пределах порогового значения крутящего момента, соответствующих началу работы двигателя в форсированном режиме. Дополнительно, или в качестве альтернативы, регулирование сопротивления педали акселератора движению педали акселератора может быть осуществлено в ответ на то, что крутящий момент находится в пределах порогового значения крутящего момента, при которых инициируется переключение на пониженную передачу трансмиссии. Интенсивность сопротивления нажатию педали акселератора может быть выше при приближении крутящего момента к такому, при котором трансмиссия переходит на передачу ниже, по сравнению с сопротивлением нажатию педали акселератора при приближении крутящего момента к такому, при котором начинается работа двигателя в форсированном режиме. После этапа 514 способ 500 завершается.
На этапе 510 способ 500 переключает вниз передачу трансмиссии на основе графика переключения на пониженную передачу трансмиссии. Кроме того, может быть прекращено увеличение сопротивления нажатию педали акселератора. Крутящий момент, на котором переключают трансмиссию на пониженную передачу, может быть различным для каждого передаточного отношения. После завершения этапа 510 способ 500 завершается.
Таким образом, способ фиг. 5 обеспечивает способ передачи обратной связи водителю, содержащий этапы: увеличивают сопротивление нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки. Указанный способ содержит этап, на котором увеличивают сопротивление нажатию педали акселератора пропорционально уменьшению разности доступного крутящего момента силовой установки. Указанный способ дополнительно содержит этап, на котором осуществляют задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения выше порогового. В указанном способе упомянутое заранее определенное время может быть основано на скорости вращения двигателя и запрашиваемом водителем крутящем моменте силовой установки.
В некоторых примерах указанный способ, кроме того, содержит этап, на котором осуществляют переключение на пониженную передачу в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового. Указанный способ, кроме того, содержит этап, на котором прекращают увеличение сопротивления нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового. Указанный способ содержит подразумевает, что сопротивление педали акселератора приводит к увеличению усилия, необходимого для нажатия педали акселератора для запрашивания дополнительного крутящего момента.
Способ фиг. 5 дополнительно обеспечивает способ передачи обратной связи водителю, содержащий этапы: увеличивают сопротивления нажатию педали акселератора в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки. Указанный способ дополнительно содержит этап, на котором применяют фильтр к требуемому крутящему моменту силовой установки. Указанный способ содержит этап, на котором применяют к требуемому крутящему моменту силовой установки низкочастотный фильтр. Указанный способ дополнительно содержит этап, на котором увеличивают сопротивление нажатию педали акселератора в ответ на нахождение требуемого крутящего момента силовой установки в пределах порогового значения крутящего момента, соответствующего переключению на пониженную передачу трансмиссии. Указанный способ содержит вариант, в котором увеличение сопротивления нажатию педали акселератора содержит увеличение сопротивления нажатию педали акселератора с большей интенсивностью, по сравнению с интенсивностью, с которой увеличивают сопротивление нажатию педали акселератора, когда значение требуемого крутящего момента силовой установки более удалено от значения крутящего момента, соответствующего переключению на пониженную передачу трансмиссии, чем пороговое значение крутящего момента. Указанный способ дополнительно содержит этап, на котором осуществляют задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового. Указанный способ дополнительно содержит этап, на котором осуществляют переключение трансмиссии на пониженную передачу в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения выше порогового.
Необходимо отметить, что примеры приведенных здесь алгоритмов управления и оценки могут быть использованы с двигателями и/или системами транспортных средств различных конструкций. Раскрытые в настоящей заявке способы и алгоритмы управления могут быть сохранены в виде исполнимых команд в постоянном запоминающем устройстве, и могут быть реализованы системой управления, содержащей контроллер в сочетании с различными датчиками, исполнительными механизмами и другими аппаратными средствами двигателя. Конкретные раскрытые в настоящей заявке алгоритмы могут представлять собой одну или несколько из любого количества стратегий вычислений, таких как основанная на событиях, основанная на прерываниях, многозадачная, многопоточная и тому подобные. Таким образом, различные описанные действия, процессы и/или функции могут быть выполнены в представленной последовательности, параллельно, или, в некоторых случаях, могут быть опущены. Аналогично, такой порядок вычислений не обязателен для достижения преимуществ и реализации признаков раскрытых в настоящей заявке примеров осуществления, но приведен для простоты графического представления и описания. Одно или несколько описанных действий, процессов и/или функций могут быть выполнены повторно в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, процессы и/или функции могут графически представлять код, который должен быть записан в энергонезависимой памяти машиночитаемого запоминающего устройства в системе управления двигателем, в которой описанные действия реализуются посредством исполнения команд в системе, содержащей различные аппаратные средства двигателя в сочетании с электронным контроллером.
На этом описание изобретения завершено. При его чтении специалисту в уровне техники должны быть очевидны множество возможных разнообразных модификаций, не выходящих за пределы духа и объема настоящего изобретения. Например, настоящее изобретение может быть с пользой применено в двигателях со схемами расположения цилиндров I3, I4, I5, V6, V8, V10 и V12, работающих на природном газе, бензине, дизельном топливе или альтернативных конфигурациях по топливу.
Представлены системы и способы обеспечения обратной связи для водителя транспортного средства. В одном из примеров упомянутые системы и способы содержат увеличение сопротивления нажатию педали акселератора в зависимости от разности между доступным крутящим моментом силовой установки и требуемым крутящим моментом силовой установки. Обеспечивается снижение времени недоступности переключения передач трансмиссии. 3 н. и 17 з.п. ф-лы, 6 ил.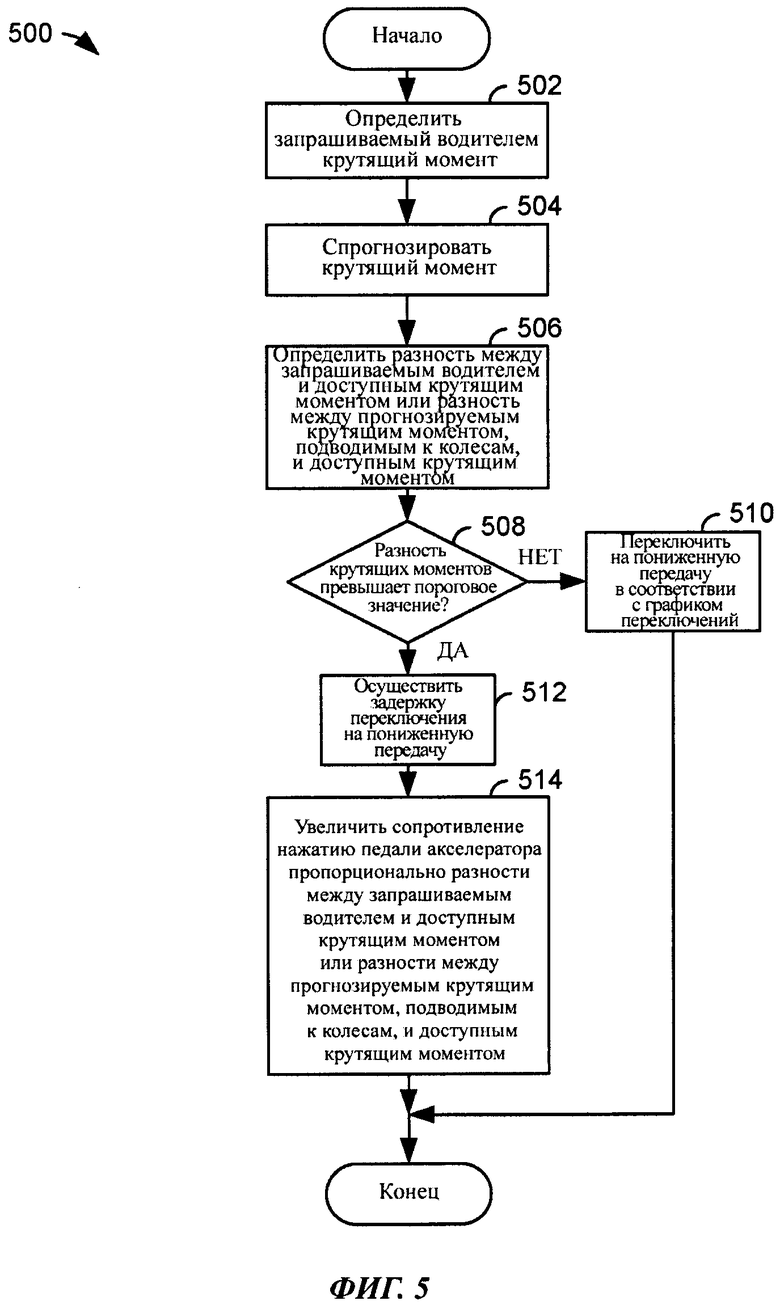
1. Способ обеспечения обратной связи для водителя транспортного средства, указывающий на режим работы транспортного средства, причем транспортное средство содержит педаль акселератора и силовую установку, при этом способ содержит следующие этапы:
когда нога водителя находится на педали акселератора, увеличивают сопротивление нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки.
2. Способ по п. 1, отличающийся тем, что увеличение сопротивления нажатию педали акселератора пропорционально уменьшению разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки.
3. Способ по п. 1, отличающийся тем, что дополнительно осуществляют задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения выше порогового.
4. Способ по п. 3, отличающийся тем, что упомянутое заранее определенное время основано на скорости вращения двигателя и запрашиваемом водителем крутящем моменте силовой установки.
5. Способ по п. 1, отличающийся тем, что дополнительно осуществляют переключение трансмиссии на пониженную передачу в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового.
6. Способ по п. 5, отличающийся тем, что дополнительно прекращают увеличение сопротивления нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового.
7. Способ по п. 1, отличающийся тем, что увеличение сопротивления нажатию педали акселератора приводит к увеличению усилия, необходимого для нажатия педали акселератора для запрашивания дополнительного крутящего момента.
8. Способ обеспечения обратной связи для водителя транспортного средства, указывающий на режим работы транспортного средства, причем транспортное средство содержит педаль акселератора и силовую установку, при этом способ содержит следующий этап:
когда нога водителя находится на педали акселератора, увеличивают сопротивление нажатию педали акселератора в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки.
9. Способ по п. 8, отличающийся тем, что дополнительно применяют фильтр к требуемому крутящему моменту силовой установки.
10. Способ по п. 9, отличающийся тем, что к требуемому крутящему моменту силовой установки применяют низкочастотный фильтр.
11. Способ по п. 8, отличающийся тем, что дополнительно увеличивают сопротивление нажатию педали акселератора в ответ на нахождение требуемого крутящего момента силовой установки в пределах порогового значения крутящего момента, соответствующего переключению на пониженную передачу трансмиссии.
12. Способ по п. 11, отличающийся тем, что увеличение сопротивления нажатию педали акселератора содержит увеличение сопротивления нажатию педали акселератора с большей интенсивностью по сравнению с интенсивностью, с которой увеличивают сопротивление нажатию педали акселератора, когда значение требуемого крутящего момента силовой установки более удалено от значения крутящего момента, соответствующего переключению на пониженную передачу трансмиссии, чем пороговое значение крутящего момента.
13. Способ по п. 8, отличающийся тем, что дополнительно осуществляют задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового.
14. Способ по п. 8, отличающийся тем, что дополнительно осуществляют переключение трансмиссии на пониженную передачу в ответ на увеличение разности текущего крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения выше порогового.
15. Система обеспечения обратной связи для водителя транспортного средства, указывающая на режим работы транспортного средства, содержащая:
педаль акселератора;
силовую установку, содержащую двигатель;
приводной механизм тактильной обратной связи для увеличения и уменьшения сопротивления нажатию педали акселератора; и
контроллер, содержащий исполняемые команды, сохраненные в долговременной памяти, на увеличение, когда нога водителя находится на педали акселератора, сопротивления нажатию педали акселератора в ответ на увеличение разности доступного крутящего момента силовой установки и прогнозируемого запрашиваемого водителем крутящего момента силовой установки.
16. Система по п. 15, отличающаяся тем, что увеличение сопротивления нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и прогнозируемого запрашиваемого водителем крутящего момента силовой установки имеет место только на передачах выше первой передачи трансмиссии.
17. Система по п. 15, отличающаяся тем, что содержит дополнительные команды на задержку переключения трансмиссии на пониженную передачу на заранее определенное время в ответ на уменьшение разности доступного крутящего момента силовой установки и прогнозируемого запрашиваемого водителем крутящего момента силовой установки.
18. Система по п. 17, отличающаяся тем, что упомянутое заранее определенное время основано на скорости вращения двигателя и запрашиваемом водителем крутящем моменте силовой установки.
19. Система по п. 15, отличающаяся тем, что содержит дополнительные команды на переключение трансмиссии на пониженную передачу в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового.
20. Система по п. 19, отличающаяся тем, что содержит дополнительные команды на прекращение увеличения сопротивления нажатию педали акселератора в ответ на уменьшение разности доступного крутящего момента силовой установки и требуемого крутящего момента силовой установки до значения ниже порогового.
| EP 1832485 A1, 12.09.2007 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

