Изобретение относится к области вычислительной техники и может быть использовано в цифровых системах, автоматизированных системах, глобальных систем позиционирования и наблюдения.
При автоматизации информационных, радиоэлектронных и других систем, работающих с изображениями, а также для более точного анализа и принятия решений, важным аспектом является прием качественного двумерного сигнала, однако в случае невозможности получения, появляется необходимость в его улучшении, то есть в проведении предварительной обработки.
К предобработке относятся: разбиение изображения на локальные участки, отделение объекта от фона, повышение четкости контуров, фильтрация с различными параметрами. Однако ограниченный объем используемых вычислительных ресурсов ведет к повышению времени обработки сигнала, либо к применению менее требовательных к вычислительным затратам методов, но в большинстве случаев не обеспечивающих достаточного качества фильтрации изображения.
Решение задачи разделения объектов на локальные участки дает возможность применения различных методов улучшения качества, для схожих групп, производить отдельную обработку областей с высокой детализацией объектов. Поэтому задача поиска и выделения объекта или интересующих участков объекта на изображении сцены является сложной комплексной задачей, решение которой позволит:
1 . Производить анализ и выделенных локальных областей на изображении, методами, требующими высоких вычислительных затрат, но являющимися точными и качественными.
2. Локализовать области обработки и повысить быстродействие последующей обработки и раелизовать комплексный подход к расспараллеливанию вычислительных систем.
Известен способ и система выделения данных об изображении объекта переднего плана на основе данных о цвете и глубине [Патент № 2426172, МПК G 06 K 9/34, опубл. G06K 9/34, G06T 7/00]. Изобретение относится к области распознавания и сегментации изображений, в частности к способу для выделения целевого объекта из фонового изображения с использованием маски. Техническим результатом является создание усовершенствованного способа выделения данных об изображении объекта, используя данные о глубине изображения. Указанный технический результат достигается тем, что создают скалярное изображение на основе разделения объекта и фона. Различие определяется по разности освещенности. В области, где разность освещенности ниже заранее установленного порогового значения, на основе разности цвета по результатам, полученным из предыдущего видеокадра, инициализируют маску. Там где скалярное изображение разности меньше заранее установленного порога маску заполняют единицами, где соответствующий пиксель принадлежит объекту, и нулями в ином случае. Затем кластеризуют скалярное изображение разности и на основе нескольких кластеров и создают маску для каждого положения пикселя видеокадра. Используя центры тяжести кластеров скалярной разности и данные по глубине для текущего положения пикселя компенсируют изменения фона сцены во времени путем обновления изображения фона на основе использования созданной маски и изображения разности. Полученный отделённый объект сохраняется для последующей обработки.
Недостатками известного способа и системы являются:
– Требуется обязательное использование видеокамер. Исследование видеопотока требует больших вычислительных затрат.
– обработка производится всего изображения, без возможности изменения параметров в зависимости от детализации объектов.
Известен способ выделения объекта на изображении на основе решения уравнений Пуассона (Poisson matting for images) [Patent USA №7636128]. Способ основан на решении системы уравнений Пуассона с граничными условиями для изображения, сегментированного на три области: передний план, фон, неизвестная область, разделяющая передний план и фон. Для разделения объектов решают уравнение Пуассона вида:

с граничным условием Дирихле:
Найденное решение системы уравнений Пуассона позволяет разделение объектов, т.е. альфа-каналом изображения, для уточнения которого применяют локальные фильтры, позволяющие вручную исправить окончательный результат с помощью решения локальных уравнений Пуассона.
Недостатками известного способа являются:
– Применение локальных фильтров, исправляющие вручную окончательный результат с помощью решения локальных уравнений Пуассона, что не позволяет получить эффективной автоматизированной системы обработки.
Известно устройство выделения контуров объектов на изображении [Патент № 2362210 МПК G06K 9/36 G06K 9/62 A61B 5/04, опубл. 20.07.2009]. Устройство содержит датчик изображения, блок выделения кадрового и строчного импульсов, аналого-цифровой преобразователь, генератор, цифровой сигнальный процессор, оперативное запоминающее устройство, селектор, блок фильтрации, блок пространственного дифференцирования, буферная память блока фильтрации, буферная память блока пространственного дифференцирования.
Недостатками известного устройства являются:
– Поиск контуров производится по анализу данных получаемых из анализа видеопотока и требует больших вычислительных затрат.
– обработка производится всего изображения, без возможности изменения параметров в зависимости от детализации объектов.
Наиболее близким к изобретению является устройство выделения высокодетализированных объектов на изображении сцены: [Патент RU № 2542876, МПК G06T 7/40, опубл. 27.02.2015]. Рассматриваемое устройство - прототип предполагает: выделять высокодетализированный объект на произвольном низкодетализированном фоне. Устройство реализует следующий алгоритм:
- Первый шаг осуществляется поиском на исходном изображении I границ, применяя детектор Канни. Данный метод детектирования границ основан на последовательном выполнении операции сглаживания изображения с целью увеличения отношения сигнал/шум путем нахождения градиента изображения с целью подсветки области с высоким пространственным разрешением, подавления всех пикселей, которые не в максимуме (немаксимальное подавление) и уменьшения градиентного массива путем использования гистерезиса с целью отслеживания оставшихся пикселей, которые не были подавлены. Результатом фильтрации является определение пространственной функции изображения объекта с использованием оптимального по Канни оператора – гауссиана
f (x ) =- x * exp (-x2 / k2s2) ,
где x – переменная; s – стандартное отклонение оператора Гаусса; *- «оптимальный» линейный оператор для свертки с изображением; k2 = 2
- На втором шаге, используя полученные границы, подсчитывается общий коэффициент детализации, который определяется по формуле 1:
где 
- На третьем шаге подобным выражению (1) вычисляется коэффициент детализации в каждом скользящем окне:
где 0,1- коэффициент усреднения, связанный с автоматическим выбором размера окна, равного 10% от общего изображения.
- На четвертом шаге коэффициенты детализации 

Устройство выделения высокодетализированных объектов на изображении сцены содержит блок хранения входной реализации, блок управления, блок детектора границ Канни, блок определения общего коэффициента детализации, блок выбора скользящего окна, блок определения коэффициента детализации в скользящем окне, блок сравнения, блок хранения выходной реализации, генератор тактовых импульсов.
Недостатками известного устройства-прототипа являются:
– анализ изображения производится на основании детектора Канни, который не позволяет локализовать локальные области на изображении, а предназначен для выявления границ объектов на изображении;
– полученный результат позволяет локализовать объекты или области с высокой детализацией, но не позволяет разделить объекты на локально-стационарные участки интенсивностей, которые можно использовать для последующей обработки.
Техническим результатом изобретения является повышение качества получаемого результата, за счет выделение локально-стационарных областей на изображении, позволяющей выполнение последующих операций обработки с использованием различных параметров. В качестве методов последующей обработки могут быть применены алгоритмы фильтрации, восстановления размытия, идентификации и выявления информационных параметров и др.
Поиск локальных стационарных участков на изображениях позволяет произвести комбинированную обработку, при которой стационарные области и участки с высокой детализацией или с тонкими границами переходов, могут обрабатываться различными методами или с разными параметрами
Технический результат достигается за счет того, что устройство содержит блок хранения входной реализации, блок выбора произвольной точки, восемь блоков выбора значений в направлении обработки, восемь блоков формирования строки, восемь блоков расчета с параметром альфа один, восемь блоков расчета с параметром альфа два, восемь блоков проверки превышения порога, восемь блоков сохранения данных длины строки, блок построения маски, блок условия анализа всего изображения, блок хранения выходной реализации.
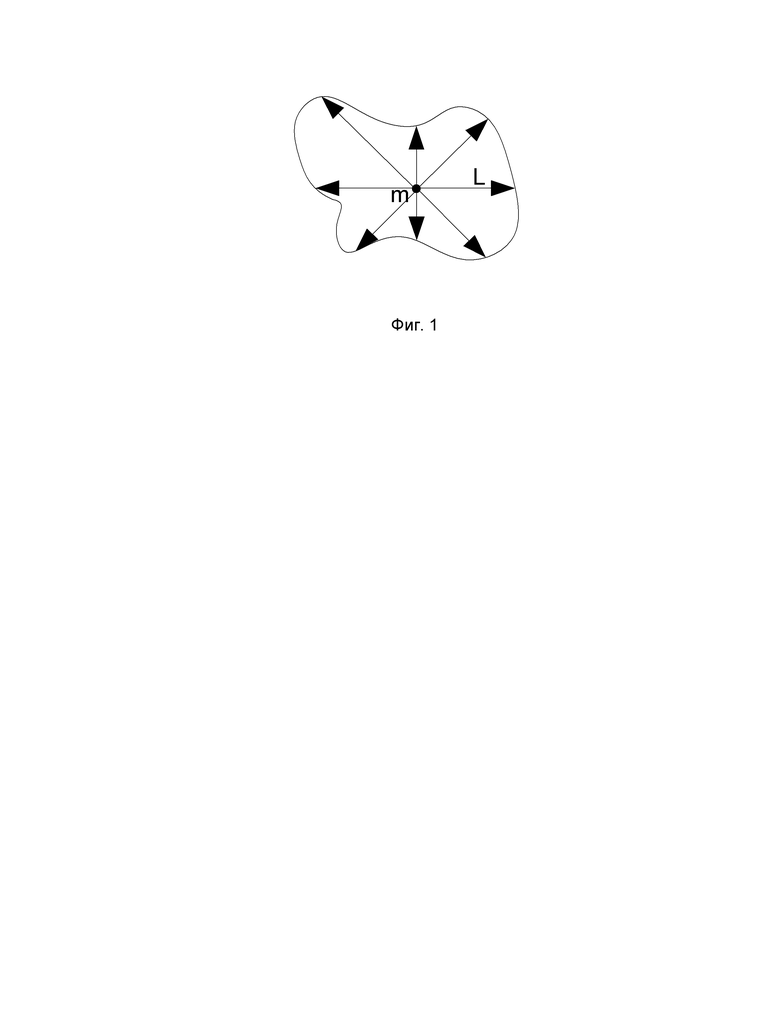
На Фиг. 1 представлен пример построения лучей, для обработки каждого из направлений.
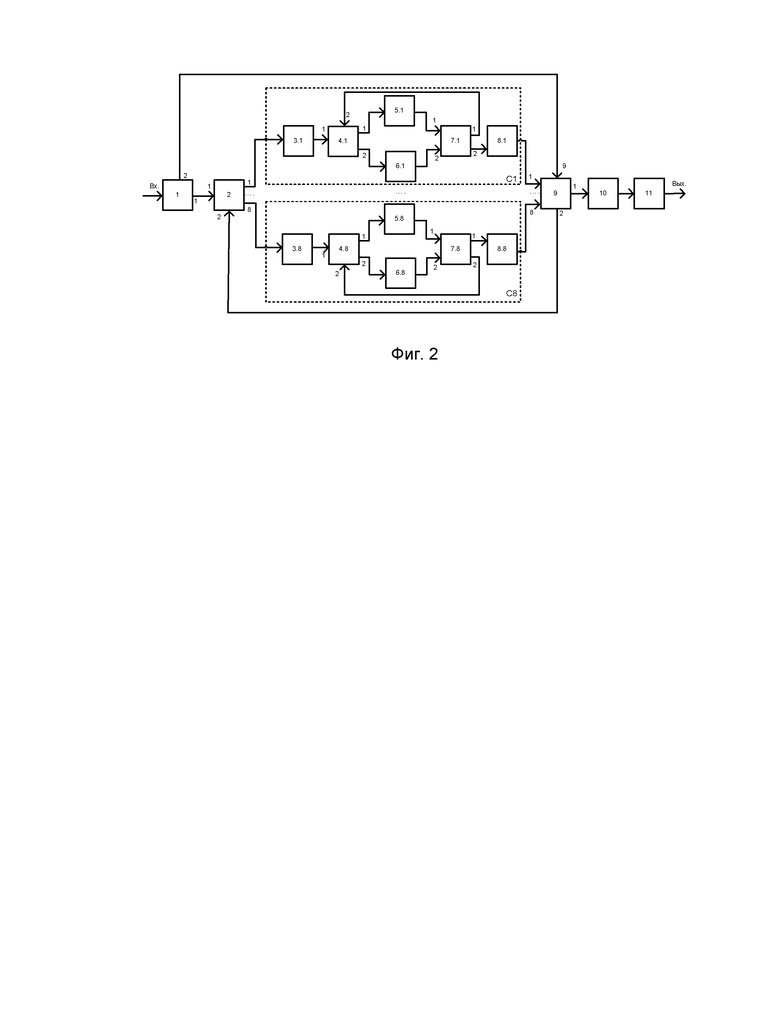
На Фиг. 2 представлена схема устройства.
Устройство обнаружения локально-стационарных областей на изображении (фиг. 2) содержит восемь областей обработки направления С1-С8, в каждой из которых включены: блок выбора значений в направлении обработки 3.1–3.8, блок формирования строки 4.1–4.8, блок расчета с параметром альфа один 5.1–5.8, блок расчета с параметром альфа два 6.1–6.8, блок проверки превышения порога 7.1–7.8, блок сохранения данных длины строки 8.1–8.8. Блок хранения входной реализации 1, вход которого является информационным входом устройства, первый выход которого подключен к первому входу блока выбора произвольной точки 2, первый выход которого подключен к входу блока выбора значений в направлении обработки 3.1, выход которого подключен к первому входу блока формирования строки 4.1, первый выход которого подключен к входу блока расчета с параметром альфа один 5.1, выход которого подключён к первому входу блока проверки превышения порога 7.1, первый выход которого подключен ко второму входу блока формирования строки 4.1, второй выход которого подключен к входу блока расчета с параметром альфа два 6.1, второй выход которого подключен ко второму входу блока проверки превышения порога 7.1, второй выход которого подключен к входу блока сохранения данных длины строки 8.1, выход которого подключен к первому входу блока построения маски 9; второй выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.2, выход которого подключен к первому входу блока формирования строки 4.2, первый выход которого подключен к входу блока расчета с параметром альфа один 5.2, выход которого подключён к первому входу блока проверки превышения порога 7.2, первый выход которого подключен ко второму входу блока формирования строки 4.2, второй выход которого подключен к входу блока расчета с параметром альфа два 6.2, второй выход которого подключен ко второму входу блока проверки превышения порога 7.2, второй выход которого подключен к входу блока сохранения данных длины строки 8.2, выход которого подключен ко второму входу блока построения маски 9; третий выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.3, выход которого подключен к первому входу блока формирования строки 4.3, первый выход которого подключен к входу блока расчета с параметром альфа один 5.3, выход которого подключён к первому входу блока проверки превышения порога 7.3, первый выход которого подключен ко второму входу блока формирования строки 4.3, второй выход которого подключен к входу блока расчета с параметром альфа два 6.3, второй выход которого подключен ко второму входу блока проверки превышения порога 7.3, второй выход которого подключен к входу блока сохранения данных длины строки 8.3, выход которого подключен к третьему входу блока построения маски 9; четвертый выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.4, выход которого подключен к первому входу блока формирования строки 4.4, первый выход которого подключен к входу блока расчета с параметром альфа один 5.4, выход которого подключён к первому входу блока проверки превышения порога 7.4, первый выход которого подключен ко второму входу блока формирования строки 4.4, второй выход которого подключен к входу блока расчета с параметром альфа два 6.4, второй выход которого подключен ко второму входу блока проверки превышения порога 7.4, второй выход которого подключен к входу блока сохранения данных длины строки 8.4, выход которого подключен к четвертому входу блока построения маски 9; пятый выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.5, выход которого подключен к первому входу блока формирования строки 4.5, первый выход которого подключен к входу блока расчета с параметром альфа один 5.5, выход которого подключён к первому входу блока проверки превышения порога 7.5, первый выход которого подключен ко второму входу блока формирования строки 4.5, второй выход которого подключен к входу блока расчета с параметром альфа два 6.5, второй выход которого подключен ко второму входу блока проверки превышения порога 7.5, второй выход которого подключен к входу блока сохранения данных длины строки 8.5, выход которого подключен к пятому входу блока построения маски 9; шестой выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.6, выход которого подключен к первому входу блока формирования строки 4.6, первый выход которого подключен к входу блока расчета с параметром альфа один 5.6, выход которого подключён к первому входу блока проверки превышения порога 7.6, первый выход которого подключен ко второму входу блока формирования строки 4.6, второй выход которого подключен к входу блока расчета с параметром альфа два 6.6, второй выход которого подключен ко второму входу блока проверки превышения порога 7.6, второй выход которого подключен к входу блока сохранения данных длины строки 8.6, выход которого подключен к шестому входу блока построения маски 9; седьмой выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.7, выход которого подключен к первому входу блока формирования строки 4.7, первый выход которого подключен к входу блока расчета с параметром альфа один 5.7, выход которого подключён к первому входу блока проверки превышения порога 7.7, первый выход которого подключен ко второму входу блока формирования строки 4.7, второй выход которого подключен к входу блока расчета с параметром альфа два 6.7, второй выход которого подключен ко второму входу блока проверки превышения порога 7.7, второй выход которого подключен к входу блока сохранения данных длины строки 8.7, выход которого подключен к седьмому входу блока построения маски 9; восьмой выход блока выбора произвольной точки 2 подключен к входу блока выбора значений в направлении обработки 3.8, выход которого подключен к первому входу блока формирования строки 4.8, первый выход которого подключен к входу блока расчета с параметром альфа один 5.8, выход которого подключён к первому входу блока проверки превышения порога 7.8, первый выход которого подключен ко второму входу блока формирования строки 4.8, второй выход которого подключен к входу блока расчета с параметром альфа два 6.8, второй выход которого подключен ко второму входу блока проверки превышения порога 7.8, второй выход которого подключен к входу блока сохранения данных длины строки 8.8, выход которого подключен к восьмому входу блока построения маски 9, второй выход которого подключен ко второму входу блока выбора произвольной точки 2; второй выход блока хранения входной реализации 1 подключен к девятому входу блока построения маски 9, первый выход которого подключен к входу блока условия анализа всего изображения 10, выход которого подключен к входу блока хранения выходной реализации 11, выход которого является информационным выходом устройства.
Предлагаемое устройство обнаружения локально-стационарных областей на изображении позволяет производить локализацию участков с малым разбросом интенсивностей, за счёт применения детектора, основанного на обнаружении изменения степенной функции сигнала, на локальном участке, с использованием многокритериального метода анализа данных. Устройство реализуют следующий алгоритм.
1. Загрузка изображения 
2. Выбор одно любого пикселя на изображении
3. Построение лучей, как показано на Фиг 1, для обработки каждого из направлений. Производится выбор значений строки от выбранной точки. Далее происходит пошаговое увеличение значений строки начиная с 2х значений и до тех пор пока условие проверки превышения порога не будет выполнено.
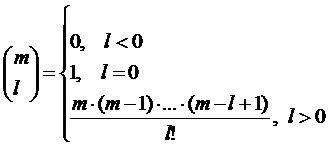
4. Расчёт элементов изменённой строки ряда 

где 
5. Происходит расчёт элементов изменённой строки ряда 


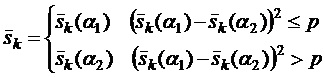
6. Происходит формирование фигуры стационарной области в диапазоне выделенных направлений. Формирование фигуры производится путём соединения точек окончания строки определённой в пункте 5, прямыми линиями.
7. Вся область, замкнутая полученной фигурой, помечается как маска объекта локально-стационарной области, в координатах входного изображения.
8. Результат сохраняется и исключается из последующего рассмотрения.
9. Осуществляется проверка условия исследования всех пикселей в изображении.
10. Производится сохранение полученного результата формирования маски объектов.
Устройство обнаружения локально-стационарных областей на изображении работает следующим образом. Изображение 


где 
В блоках расчета с параметром альфа два 6.1–6.2 происходит расчёт элементов изменённой строки ряда 


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ВЫСОКОДЕТАЛИЗИРОВАННЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ СЦЕНЫ | 2013 |
|
RU2542876C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ТЕКСТУРИРОВАННОМ ФОНЕ ПРИ ОБРАБОТКЕ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2522044C1 |
| УСТРОЙСТВО ПРЕДОБРАБОТКИ КАРТЫ ГЛУБИНЫ СТЕРЕОИЗОБРАЖЕНИЯ | 2013 |
|
RU2535183C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ КАРТЫ ГЛУБИНЫ СЦЕНЫ | 2014 |
|
RU2580466C1 |
| Устройство для удаления логотипов и субтитров с видеопоследовательностей | 2017 |
|
RU2669470C1 |
| Устройство для восстановления карты глубины с поиском похожих блоков на основе нейронной сети | 2019 |
|
RU2716311C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ ИМПУЛЬСНОГО ШУМА ПРИ ОБРАБОТКЕ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2010 |
|
RU2449355C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО РАСПОЗНАВАНИЯ ЛИЦ ПРИ ОБРАБОТКЕ ГРУППОВОЙ ФОТОГРАФИИ | 2013 |
|
RU2541918C2 |
| Устройство комплексирования изображений, полученных разнородными сенсорами | 2024 |
|
RU2837304C1 |
| СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ЛОКАЛЬНЫХ ОСОБЕННОСТЕЙ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2535184C2 |
Изобретение относится к области вычислительной техники и может быть использовано в системах анализа и обработки изображений. Техническим результатом является повышение качества получаемого результата. Устройство обнаружения локально-стационарных областей на изображении содержит блок хранения входной реализации, блок выбора произвольной точки, восемь блоков выбора значений в направлении обработки, восемь блоков формирования строки, восемь блоков расчета с параметром альфа один, восемь блоков расчета с параметром альфа два, восемь блоков проверки превышения порога, восемь блоков сохранения данных длины строки, блок построения маски, блок условия анализа всего изображения, блок хранения выходной реализации. 2 ил.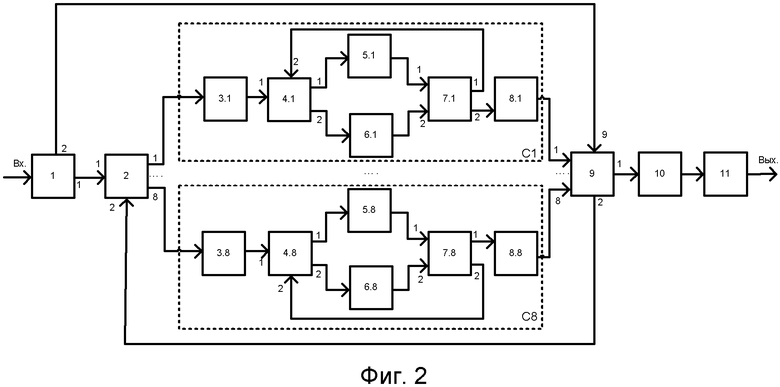
Устройство обнаружения локально-стационарных областей на изображении содержит блок хранения входной реализации (1), вход которого является информационным входом устройства, первый выход которого подключен к первому входу блока выбора произвольной точки (2), первый – восьмой выходы которого подключены к входам блоков выбора значений в направлении обработки (3.1–3.8), выходы которых подключены к первым входам блоков формирования строки (4.1–4.8) соответственно, первые выходы которых подключены к входам блоков расчета с параметром альфа один (5.1-5.8) соответственно, выходы которых подключены к первым входам блоков проверки превышения порога (7.1-7.8) соответственно, первые выходы которых подключены ко вторым входам блоков формирования строки (4.1–4.8) соответственно, вторые выходы которых подключены к входам блоков расчета с параметром альфа два (6.1–6.8) соответственно, вторые выходы которых подключены ко вторым входам блоков проверки превышения порога (7.1–7.8) соответственно, вторые выходы которых подключены к входам блоков сохранения данных длины строки (8.1–8.8) соответственно, выходы которых подключены к первому – восьмому входам блока построения маски (9), второй выход которого подключен ко второму входу блока выбора произвольной точки (2); второй выход блока хранения входной реализации (1) подключен к девятому входу блока построения маски (9), первый выход которого подключен к входу блока условия анализа всего изображения (10), выход которого подключен к входу блока хранения выходной реализации (11), выход которого является информационным выходом устройства.
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ВЫСОКОДЕТАЛИЗИРОВАННЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ СЦЕНЫ | 2013 |
|
RU2542876C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ТЕКСТУРИРОВАННОМ ФОНЕ ПРИ ОБРАБОТКЕ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2522044C1 |
| УСТРОЙСТВО ПОИСКА СРЕДНЕЙ ЛИНИИ ГРАНИЦ ОБЪЕКТОВ НА РАЗМЫТЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2622877C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2007 |
|
RU2362210C1 |
| US 7636128 B2, 22.12.2009 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

