[0001] Область техники, к которой относится изобретение
[0002] Один из аспектов относится к устройству для нанесения покрытия на полотно поглощающей подложки. Другой аспект относится к способу нанесения покрытия на полотно поглощающей подложки. Еще один аспект относится к преобразующему устройству, которое содержит такое устройство для нанесения покрытия на полотно поглощающей подложки. Такая поглощающая подложка может преобразовываться в продукты поглощающих листов, которые имеют конкретное, хотя и не исключительное применение для гигиенических или бытовых целей. В качестве примера, такие продукты поглощающих листов можно использовать в качестве туалетной бумаги в туалетах. Возможны и другие применения, такие как пеленки, полотенца, кухонные полотенца, полотенца для рук, туалетная бумага, салфетки, косметические салфетки, влажные салфетки, и тому подобное.
[0003] Уровень техники
[0004] Полотно поглощающей подложки может представлять собой полотно гигиенической бумаги, которую получают с помощью обычного способа с использованием папмашины или сушки суховоздушным способом или другого способа изготовления. Гигиеническая бумага относится к поглощающей бумаге на основе целлюлозных волокон, которые в этой области технологии также называют листами основы гигиенической бумаги. Типичная поглощающая бумага имеет низкую базовую массу, в пределах от 10 до 60 г/м2 или от 30 до 50 г/м2.
[0005] Полотно поглощающей подложки может также представлять собой полотно нетканого материала, который получают с помощью способа изготовления с помощью суховоздушного формования или способа изготовления спанлэйд или другого способа изготовления. Нетканый материал, содержащий целлюлозные волокна, относится к поглощающей бумаге, которая в этой области технологии также называется нетканым материалом, или к полотну, изготовленному из волокон, подобному полотну, полученному суховоздушным формованием. Типичная поглощающая бумага имеет базовую массу в пределах от 20 до 300 г/м2, или от 40 до 60 г/м2.
[0006] Полотно поглощающей подложки направляется на различные стадии преобразования перед намоткой в виде рулона-заготовки. Например, одна стадия преобразования включает получение слоя поглощающей подложки с определенной эстетичной структурой, другая стадия преобразования включает нанесение материала покрытия на слой поглощающей подложки, еще одна стадия преобразования включает соединение различных слоев поглощающей подложки вместе, еще одна стадия преобразования включает снабжение полотна поперечной перфорацией/линиями отрыва, расположенными на равных расстояниях друг от друга, и тому подобное….
[0007] Документ US 4814204 описывает устройство для нанесения разделенных некоторым расстоянием отдельных полос текучей среды на поверхность движущегося полотна. Устройство содержит вращающийся аппликаторный вал, частично погруженный в ванну с текучей средой. Ракельный нож с вырезами в контакте с поверхностью вала удаляет текучую среду с поверхности вала за исключением области вырезов с формированием разделенных некоторым расстоянием участков текучей среды на окружности поверхности вала. Движущееся полотно частично обертывает аппликаторный вал, в котором формируются упомянутые участки, но оно движется в 20-200 раз быстрее скорости поверхности аппликаторного вала, что дает в результате относительно равномерное распределение текучей среды в форме прерывистой полосы на поверхности полотна.
[0008] Однако такой аппликатор с валом и с единичным контактом с ракельным ножом не адаптирован для нанесения покрытия на движущееся полотно дискретным образом, а именно в конкретных положениях полотна, или периодическим образом, а именно, в определенный момент времени процесса изготовления полотна.
[0009] Кроме того, желательно также учитывать современный тренд промышленной скорости производства процесса преобразования (до 1200 м/мин), накладывающий ограничение на полотно, что может приводить в результате к разрыву полотна.
[0010] Таким образом, имеется необходимость в улучшении нанесения покрытия на полотно поглощающей подложки в преобразующем устройстве. Кроме того, это необходимо сделать экономичным или финансово эффективным образом.
[0011] Сущность изобретения
[0012] Желательно предложить устройство и/или способ нанесения покрытия на полотно поглощающей подложки, которые преодолевают недостатки устройства и/или способа нанесения покрытия предыдущего уровня техники. В частности, желательно сделать возможным дискретное или периодическое нанесение покрытия на движущееся полотно поглощающей подложки. Более конкретно, желательно решить эту проблему даже для полотна поглощающей подложки, движущегося при промышленной скорости производства в преобразующем устройстве (например, до 1200 м/мин).
[0013] Согласно одному аспекту предлагается устройство для нанесения покрытия на полотно поглощающей подложки, для нанесения материала покрытия на полотно поглощающей подложки на определенной длине, содержащее:
- опорное устройство, выполненное с возможностью поддержки полотна поглощающей подложки, движущегося со скоростью в пределах от приблизительно 200 м/мин до приблизительно 1200 м/мин, и
- дозирующее и транспортирующее устройство, выполненное с возможностью взаимодействия с узлом для хранения и транспортировки материала покрытия таким образом, чтобы непрерывно покрывать поверхность дозирующего и транспортирующего устройства однородным количеством материала покрытия. Кроме того, устройство для нанесения покрытия на полотно поглощающей подложки содержит колебательный механизм, выполненный с возможностью придания колебательного движения дозирующему и транспортирующему устройству или опорному устройству от зацепленного положения до удаленного положения, и дозирующее и транспортирующее устройство расположено относительно опорного устройства таким образом, что транспортирующее устройство наносит материал покрытия на полотно поглощающей подложки в положении контакта, в котором полотно из поглощающего материала вступает в контакт с опорным устройством и дозирующим и транспортирующим устройством только в зацепленном положении.
[0014] Опорное устройство может представлять собой опорный вал или опорную пластину. Дозирующее и транспортирующее устройство может содержать транспортирующий вал.
[0015] Дозирующее и транспортирующее устройство может содержать дозирующий вал и транспортирующий вал, дозирующий вал выполнен с возможностью взаимодействия с узлом для хранения и транспортировки материала покрытия таким образом, чтобы непрерывно покрывать поверхность дозирующего вала однородным количеством материала покрытия, и транспортирующий вал соединен с дозирующим валом таким образом, чтобы транспортировать материал покрытия от дозирующего вала к транспортирующему валу.
[0016] Колебательный механизм может содержать вращающийся механизм, расположенный, чтобы вызывать вращение транспортирующего вала по окружности дозирующего вала в угловом секторе определяемому зацепленным и удаленным положениями и с центром на валу вращения дозирующего вала.
[0017] Колебательный механизм может содержать механизм прямолинейного движения, выполненный с возможностью совместного поступательного движения дозирующего вала и транспортирующего вала на расстояние, определяемое зацепленным и удаленным положениями.
[0018] Дополнительный транспортирующий вал может располагаться между опорным валом и транспортирующим валом и в постоянном контакте с опорным валом при любом положении транспортирующего вала.
[0019] Опорный вал может представлять собой эксцентрический вал.
[0020] Колебательный механизм может содержать другой вращающийся механизм, содержащий колебательный рычаг, соединенный на одном конце с валом вращения опорного вала, а на другом конце с шарниром, вращающийся механизм выполнен с возможностью вращения опорного вала в угловом секторе, определяемом зацепленным и удаленным положениями, и с центром на шарнире.
[0021] Колебательный механизм может содержать другой механизм прямолинейного движения, выполненный с возможностью прямолинейного движения опорного вала на расстояние, определяемое зацепленным и удаленным положениями.
[0022] Узел для хранения и транспортировки материала покрытия может выбираться из группы из камерного ракеля, распылительного узла и щелевой фильеры.
[0023] Согласно другому аспекту, предлагается преобразующее устройство, содержащее узел тиснения и/или узел перематывания, где преобразующее устройство дополнительно содержит устройство для нанесения покрытия на полотно поглощающей подложки согласно одному из вариантов осуществления настоящего изобретения, расположенное вблизи узла тиснения и/или расположенное вблизи узла перематывания и перед ним.
[0024] Согласно другому аспекту, предлагается применение преобразующего устройства, описанного выше, для изготовления продуктов поглощающих листов, выбранных среди группы из пеленок, полотенец, кухонных полотенец, полотенец для рук, туалетной бумаги, салфеток и косметических салфеток.
[0025] Согласно еще одному аспекту предлагается способ нанесения покрытия на полотно поглощающей подложки, для нанесения материала покрытия на полотно поглощающей подложки на определенную длину, включающий:
- перенос полотна поглощающей подложки при скорости в пределах от приблизительно 200 м/мин до приблизительно 1200 м/мин и поддержку переносимого полотна поглощающей подложки посредством опорного устройства,
- непрерывное нанесение покрытия на поверхность дозирующего и транспортирующего устройства однородным количеством материала покрытия посредством узла для хранения и транспортировки материала покрытия, взаимодействующего с дозирующим и транспортирующим устройством
- колебания дозирующего и транспортирующего устройства или опорного устройства от зацепленного положения до удаленного положения, и
- нанесение материала покрытия на полотно поглощающей подложки в положении контакта, где полотно поглощающей подложки вступает в контакт с опорным устройством и дозирующим и транспортирующим устройством только в зацепленном положении.
[0026] Дозирующее и транспортирующее устройство может содержать транспортирующий вал. Стадия осуществления колебаний может включать вращение транспортирующего вала от зацепленного положения до удаленного положения в угловом секторе, определяемом зацепленным и удаленным положениями.
[0027] Стадия осуществления колебаний может включать прямолинейное движение транспортирующего вала на расстояние, определяемое зацепленным и удаленным положениями.
[0028] Опорное устройство может представлять собой опорный вал. Стадия осуществления колебаний может включать эксцентрическое вращение опорного вала, зацепленное положение соответствует определенному угловому сектору опорного вала.
[0029] Стадия осуществления колебаний может включать вращение опорного вала в угловом секторе, определяемом зацепленным положением и удаленным положением.
[0030] Стадия осуществления колебаний может включать прямолинейное движение опорного вала на расстояние, определяемое зацепленным положением и удаленным положением.
[0031] Согласно вариантам осуществления настоящего изобретения, можно наносить материал покрытия на полотно поглощающей подложки дискретным или периодическим образом. Таким образом, покрытие полотна поглощающей подложки может наноситься только там, где это необходимо.
[0032] При этом с помощью вариантов осуществления настоящего изобретения риск разрыва полотна, когда начинается операция нанесения покрытия устраняется или по меньшей мере значительно уменьшается.
[0033] Другие преимущественно станут понятными из следующего далее описания конкретных вариантов осуществления настоящего изобретения.
[0034] Краткое описание чертежей
[0035] Варианты осуществления настоящего изобретения иллюстрируются в качестве примеров и не ограничиваются прилагаемыми чертежами, на которых сходные ссылки обозначают сходные элементы:
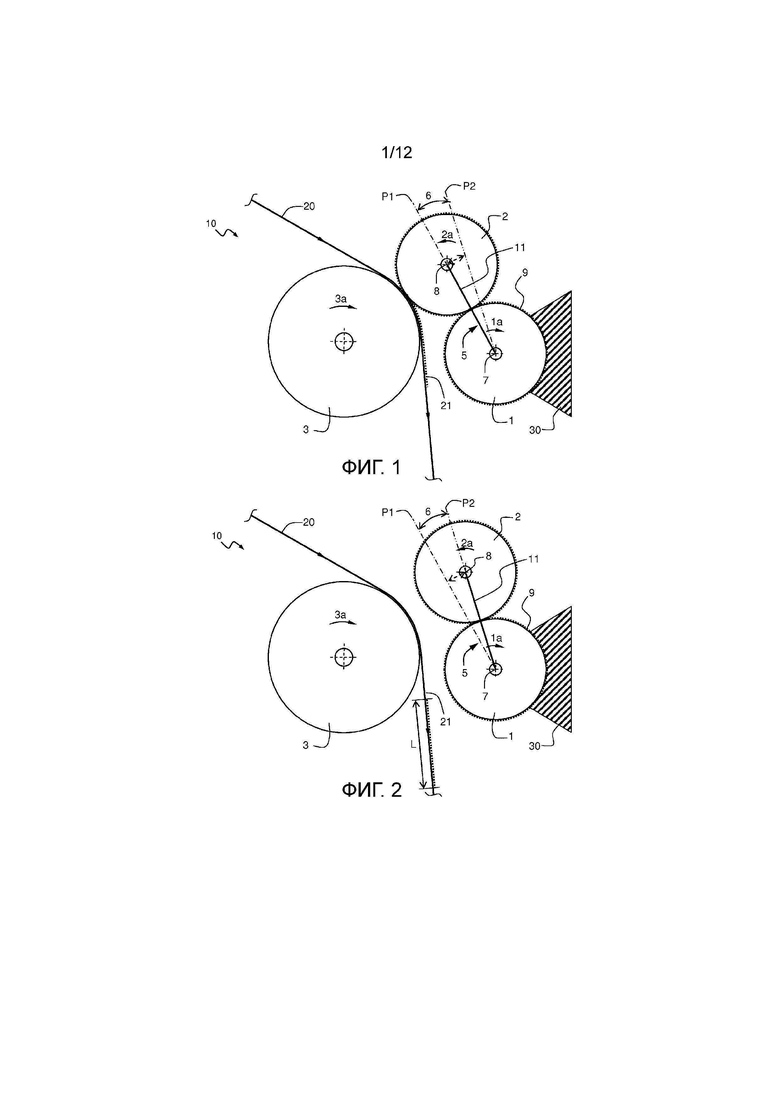
Фиг.1 и 2 представляют собой виды сбоку, схематически иллюстрирующие первый вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный первый вариант осуществления включает камерный ракель и вращающийся механизм;
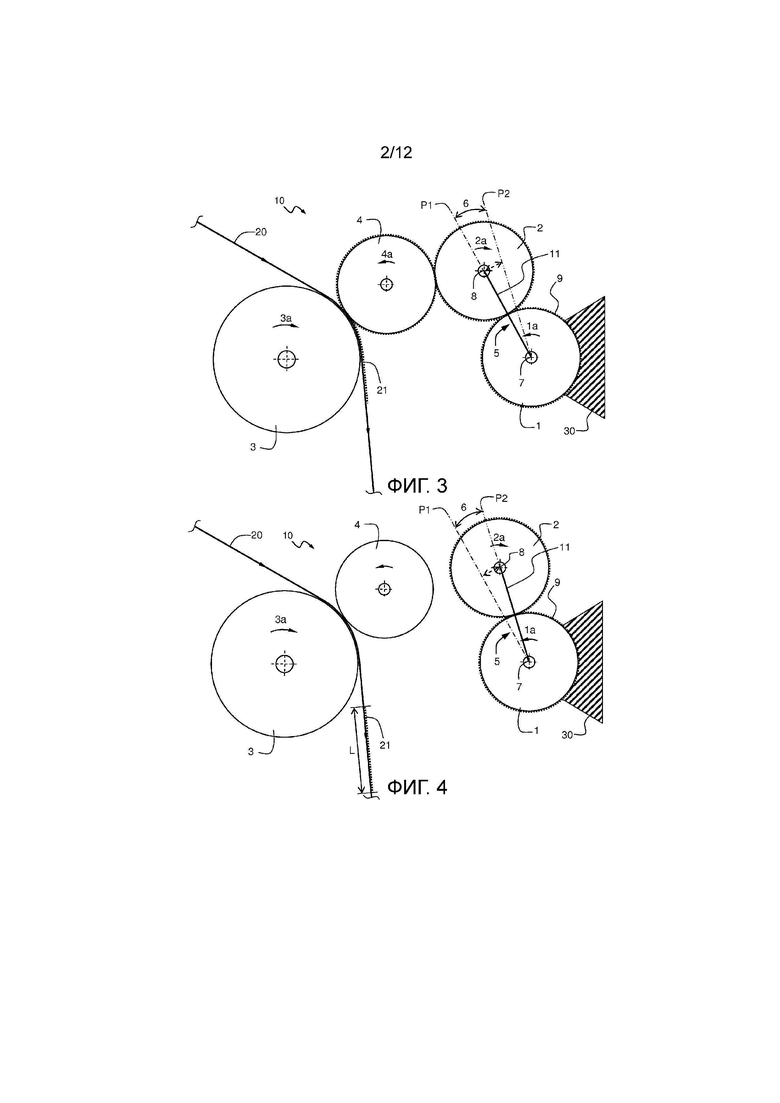
Фиг.3 и 4 представляют собой виды сбоку, схематически иллюстрирующие второй вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный второй вариант осуществления включает камерный ракель, вращающийся механизм и дополнительный транспортирующий вал;
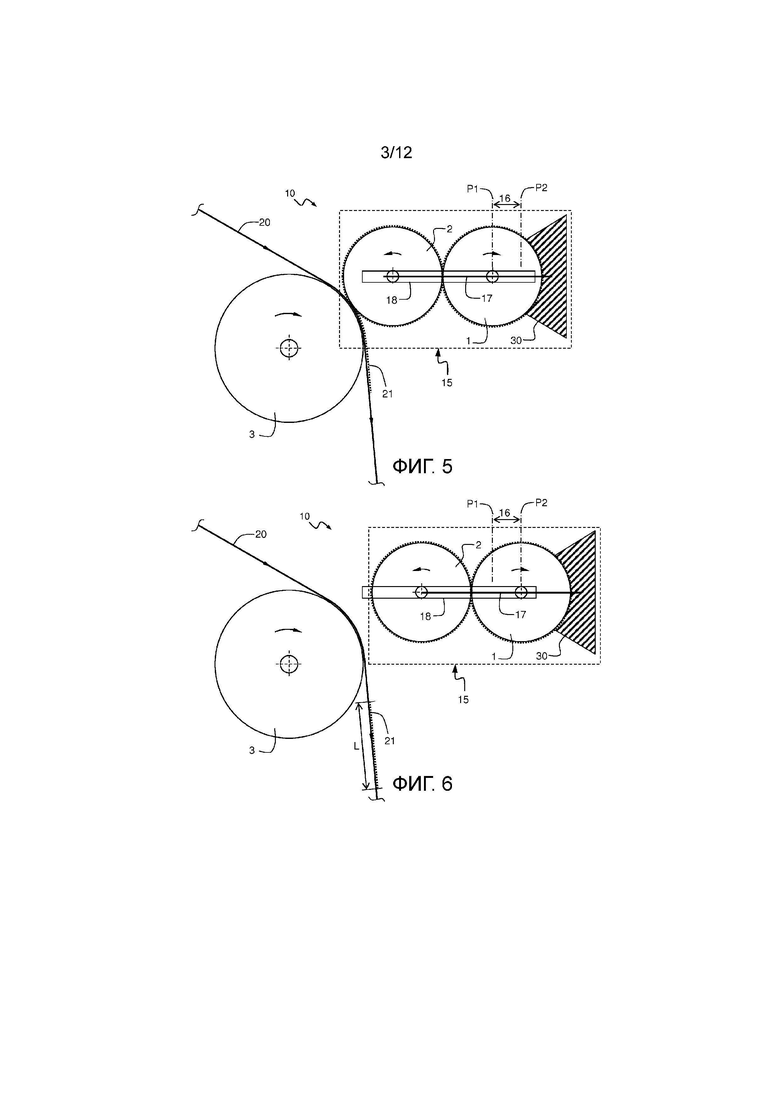
Фиг.5 и 6 представляют собой виды сбоку, схематически иллюстрирующие третий вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный третий вариант осуществления включает камерный ракель и механизм прямолинейного движения;
Фиг.7 и 8 представляют собой виды сбоку, схематически иллюстрирующие четвертый вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный четвертый вариант осуществления включает камерный ракель, механизм прямолинейного движения и дополнительный транспортирующий вал;
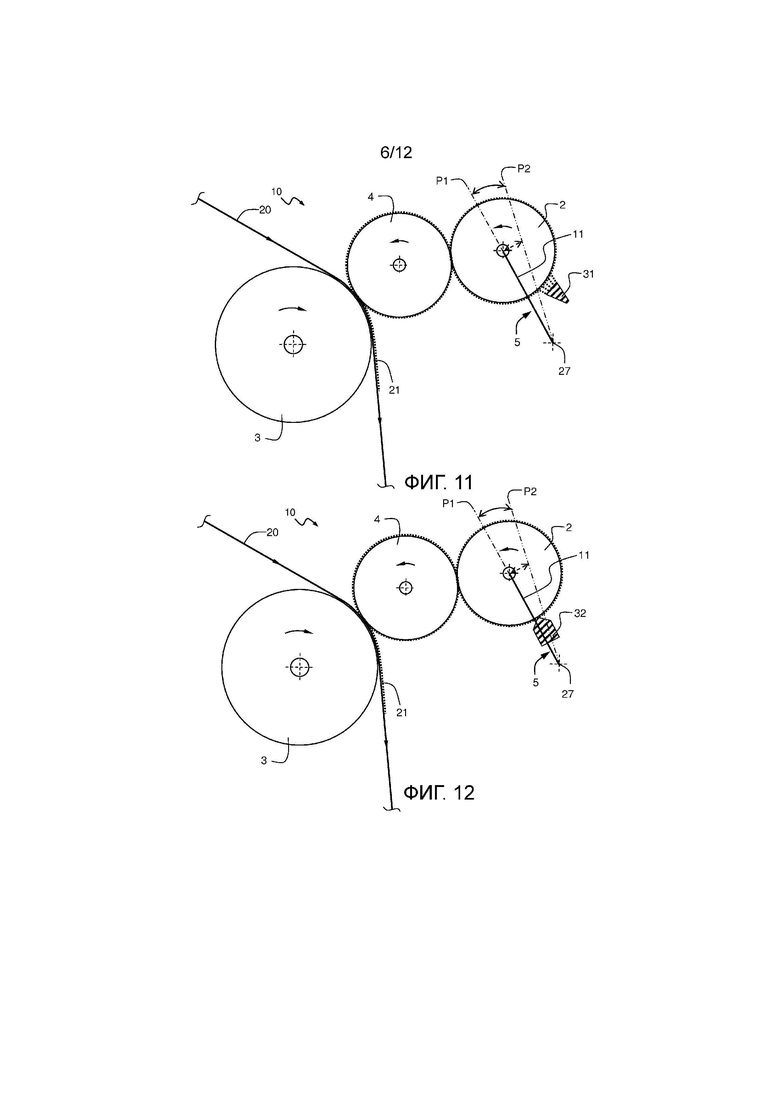
Фиг.9, 10, 11 и 12 представляют собой виды сбоку, схематически иллюстрирующие альтернативы первого и второго вариантов осуществления с использованием распылительного узла и щелевой фильеры, соответственно;
Фиг.13, 14, 15 и 16 представляют собой виды сбоку, схематически иллюстрирующие альтернативы третьему и четвертому варианты осуществления с использованием распылительного узла и щелевой фильеры, соответственно;
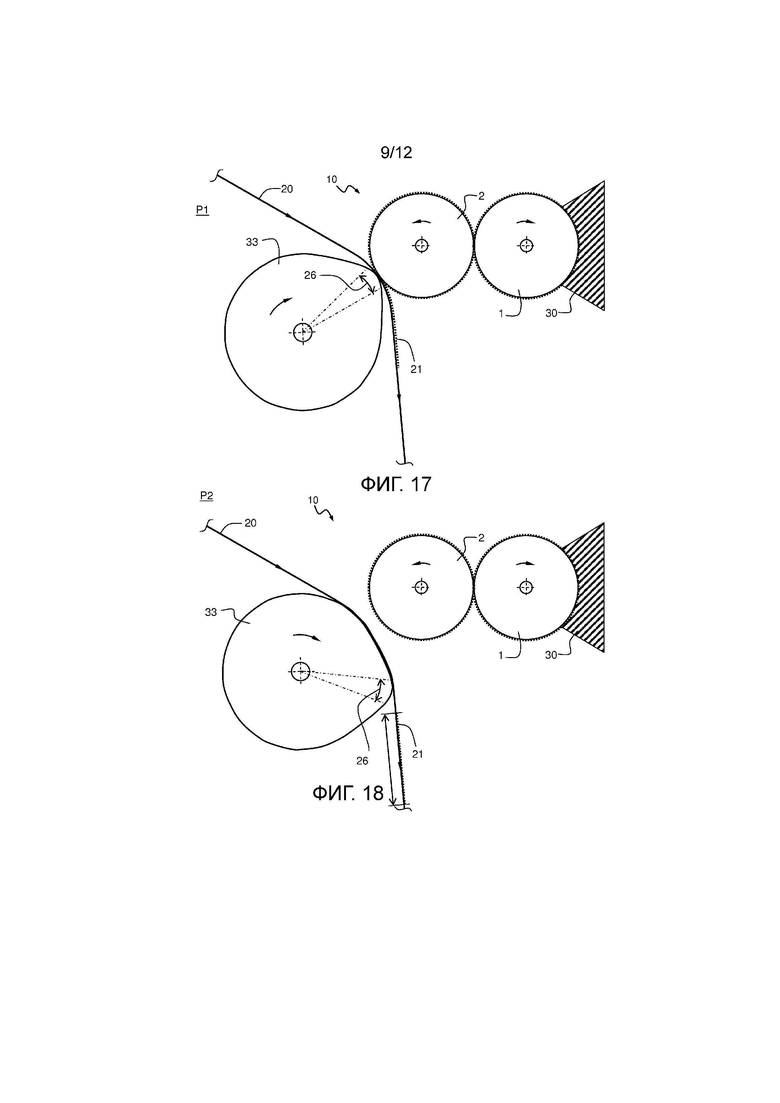
Фиг.17 и 18 представляют собой виды сбоку, схематически иллюстрирующие пятый вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный пятый вариант осуществления включает опорный вал, имеющий форму кулачка;
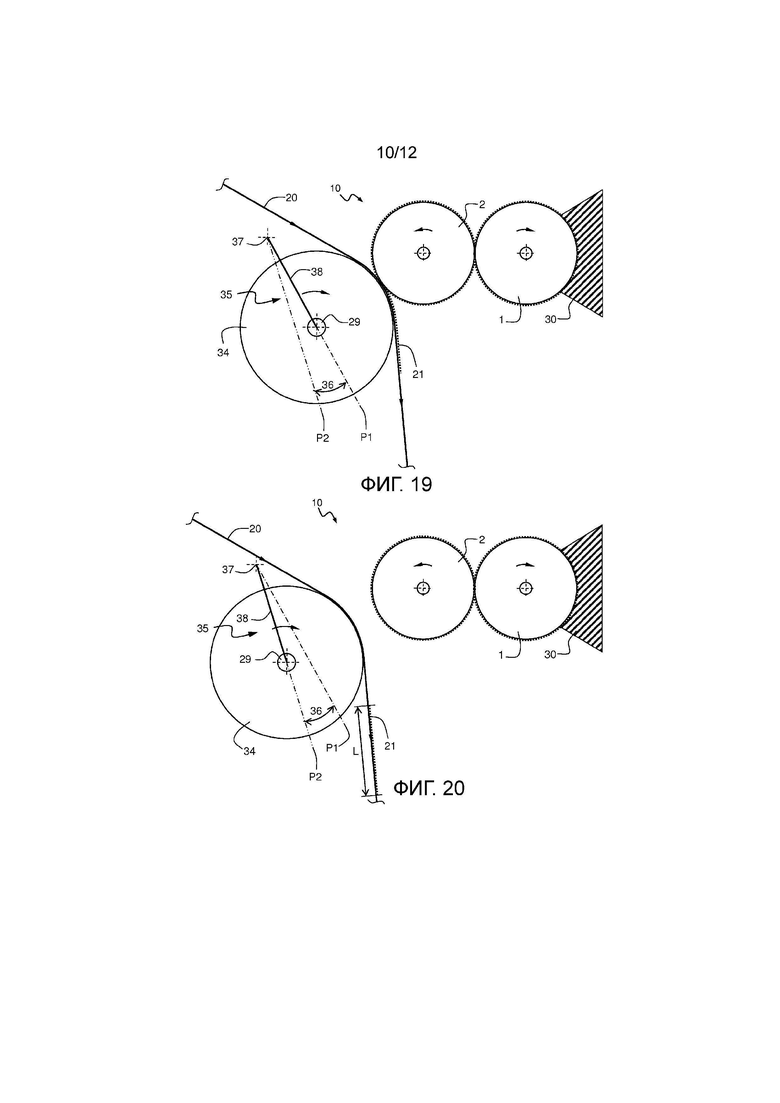
Фиг.19 и 20 представляют собой виды сбоку, схематически иллюстрирующие шестой вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный шестой вариант осуществления включает опорный вал, соединенный с вращающимся механизмом;
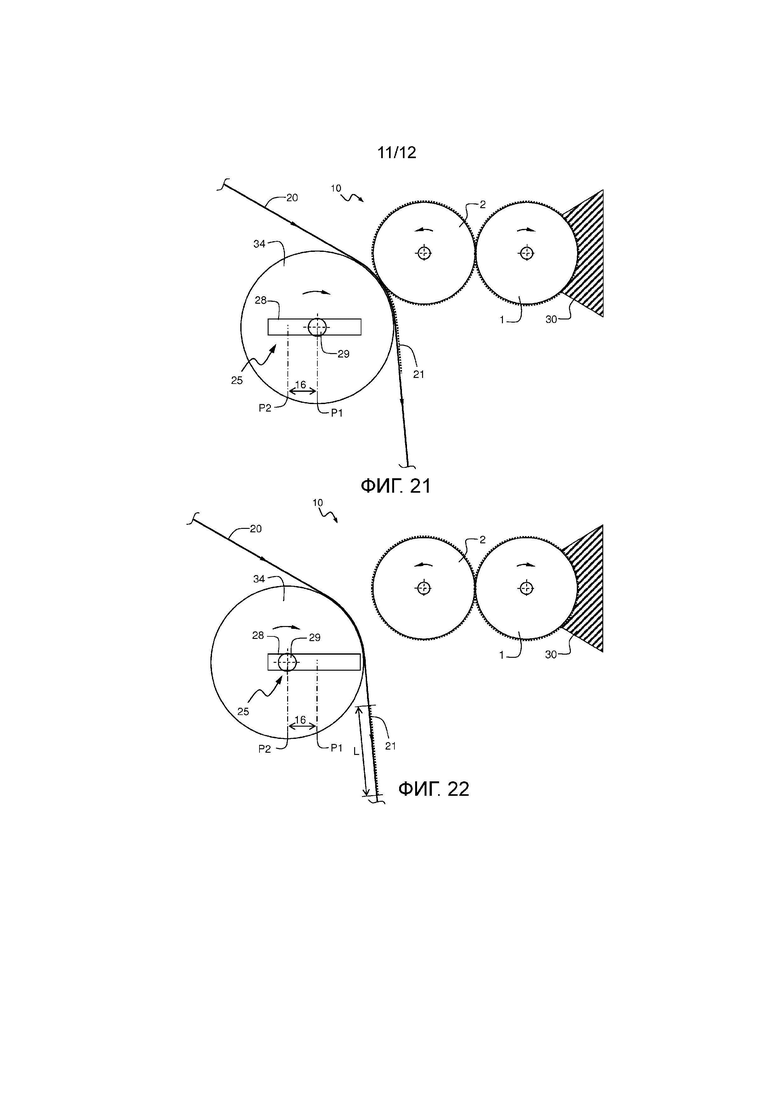
Фиг.21 и 22 представляют собой виды сбоку, схематически иллюстрирующие седьмой вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки в зацепленном положении и в удаленном положении, соответственно, указанный седьмой вариант осуществления включает опорный вал с прямолинейным движением; и
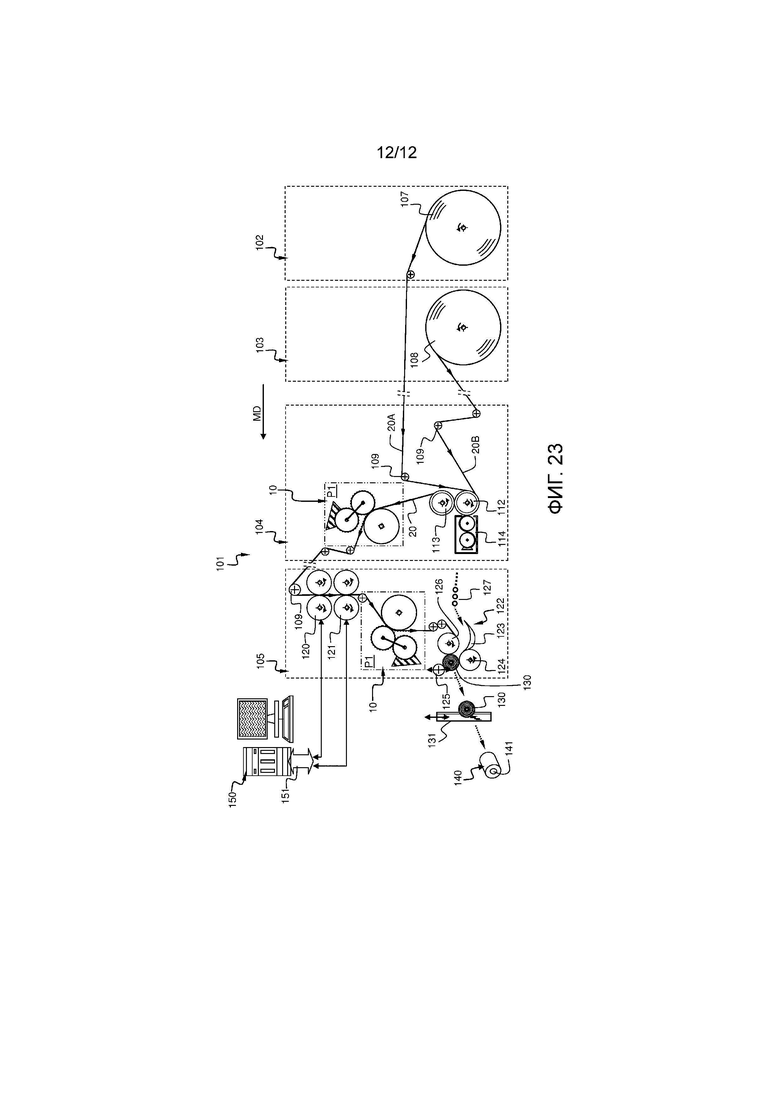
Фиг.23 представляет собой вид сбоку, схематически иллюстрирующий преобразующее устройство/линию, содержащую устройство для нанесения покрытия на полотно поглощающей подложки.
[0036] Подробное описание конкретных вариантов осуществления
[0037] Первый вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.1 и 2. Фиг.1 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.2 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно первому варианту осуществления основано на камерном ракеле и вращающемся механизме, который будет описан подробно ниже. Устройство 10 для нанесения покрытия на полотно поглощающей подложки используют для нанесения материала 21 покрытия на полотно 20 поглощающей подложки на определенной длине L. Устройство 10 для нанесения покрытия на полотно поглощающей подложки содержит дозирующий вал 1, транспортирующий вал 2, опорный вал 3, узел для хранения и транспортировки материала покрытия, реализованный в форме камерного ракеля 30, и колебательный механизм 5.
[0038] Опорный вал 3 поддерживает полотно 20 поглощающей подложки, движущееся со скоростью в пределах от приблизительно 200 м/мин до приблизительно 1200 м/мин. Опорный вал 3 приводится во вращение в направлении, показанном стрелкой 3a, с помощью соответствующего двигателя и механизма передач (не показан). Полотно 20 поглощающей подложки может дополнительно поддерживаться направляющими валиками (не показаны) до и после опорного вала 3, так что полотно 20 поглощающей подложки частично обертывается вокруг опорного вала 3. Полотно 20 поглощающей подложки может поступать из узла размотки (не показан) с большого исходного вала. Полотно 20 поглощающей подложки может направляться в способ преобразования, включающий различные стадии, и может в конечном счете перематываться в виде рулонов розничных размеров, имеющие конкретные характеристики. Например, способ преобразования преобразует большое исходное полотно (например, имеющее ширину полосы от приблизительно 1,80 м до приблизительно 7 м) в рулоны розничных размеров вроде рулонов туалетной бумаги или рулонов бумажных полотенец (например, имеющих ширину полосы от приблизительно 8 см до приблизительно 40 см).
[0039] Дозирующий вал 1 взаимодействует с камерным ракелем 30 (то есть, с узлом для хранения и транспортировки материала покрытия). Благодаря вращению дозирующего вала 1, окружная поверхность 9 дозирующего вала 1 непрерывно покрывается однородным количеством материала 21 покрытия. Транспортирующий вал 2 соединен с дозирующим валом 1 в том смысле, что имеется точка контакта между обоими валами. Материал покрытия переносится с дозирующего вала 1 на транспортирующий вал 2 в этой точке контакта. Дозирующий вал 1 и транспортирующий вал 2 приводятся во вращение в соответствующих направлениях, показанных стрелками 1a и 2a, с помощью соответствующего двигателя и механизма передач (не показан). Дозирующий вал 1 и транспортирующий вал 2 вращаются в противоположных направлениях. Опорный вал 3 и транспортирующий вал 2 также вращаются в противоположных направлениях. Опорный вал 3 и транспортирующий вал 2 вращаются со скоростью близкой к линейной скорости полотна 20 поглощающей подложки.
[0040] Камерный ракель 30 представляет собой известное устройство для нанесения определенного количества материала покрытия однородным образом на поверхность вала. Дозирующий вал 1 вращается образом, частично погруженным в танк камерного ракеля 30, содержащий материал покрытия. Ракельный нож или скребок снимает избыток материала покрытия с поверхности 9 дозирующего вала 1 и сглаживает пленку материала покрытия, приклеившегося к поверхности 9 дозирующего вала 1, перед тем, как пленка повернется до контакта с транспортирующим валом 2. Избыток материала покрытия рециклируется обратно в контейнер камерного ракеля 30. Материал покрытия может представлять собой жидкую композицию или суспензию. Например, материал покрытия включает воду или композицию на основе воды, или полимер, такой как простой полиэфирполиол, вроде полиэтиленгликоля или полипропиленгликоля.
[0041] Колебательный механизм 5 располагается для придания колебательного движения посредством вращения транспортирующего вала 2 от зацепленного положения P1 (Фиг.1) до удаленного положения P2 (Фиг.2).
[0042] Зацепленное положение P1 (Фиг.1) соответствует положению, где полотно 20 поглощающего материала вступает контакты как с опорным валом 3, так и с транспортирующим валом 2. На практике, полотно 20 поглощающего материала проходит через зазор между опорным валом 3 и транспортирующим валом 2. Указанный зазор достаточно узкий, так что полотно вступает в контакт как с опорным валом 3, на одной стороне, так и с транспортирующим валом 2, на другой стороне. Это положение определяет положение контакта, где материал 21 покрытия может наноситься на движущееся полотно 20 поглощающего материала.
[0043] Удаленное положение P2 (Фиг.2) соответствует положению, где транспортирующий вал 2 находится вдали от опорного вала 3. В этом положении, полотно 20 поглощающего материала проходит над опорным валом 3 и не вступает в контакт с транспортирующим валом 2. При колебании от зацепленного положения P1 до удаленного положения P2, транспортирующий вал 2 проходит над угловым сектором 6 соответствующим различным положениям. В настоящем описании удаленное положение также соответствует этим различным положениям между зацепленным положением P1 и удаленным положением P2, где транспортирующий вал 2 находится вдали от опорного вала 3 и от движущегося полотна 20 поглощающего материала, так что материал 21 покрытия не может наноситься на движущееся полотно 20 поглощающего материала.
[0044] В итоге, только когда транспортирующий вал 2 находится в зацепленном положении (Фиг.1) относительно опорного вала 3, транспортирующий вал 2 наносит материал 21 покрытия на полотно 20 поглощающей подложки в положении контакта. В зацепленном положении P1, последовательность контакта между камерным ракелем 30, дозирующим валом 1, транспортирующим валом 2, движущимся полотном 20 поглощающей подложки и опорным валом 3 дает в результате достаточное и однородное нанесение материала 21 покрытия на полотно 20. Продолжительность существования зацепленного положения P1 определяет длину покрытия L, где материал 21 покрытия наносится на полотно 20 поглощающей подложки. Например, когда полотно 20 движется со скоростью 600 м/мин или 10 м/сек, продолжительность существования зацепленного положения около 1/10-ой секунды соответствует длине покрытия L 1 м. Синхронизация колебательного движения, которое определяет нанесение материала покрытия относительно конкретных положений вдоль частей полотна (части полотна могут определять общую длину полотна, доступного в рулоне меньшего размера), и в частности, относительно первых витков, определяющих отверстие формирующегося впоследствии рулона розничного размера, или головные края и/или хвостовые края формирующихся впоследствии рулонов розничных размеров. Также, посредством регулировки синхронизации колебательного движения, можно снабдить каждые части полотна определенной штампованной структурой материала покрытия (например, получить ряд полосок материала покрытия).
[0045] По настоящему варианту осуществления, колебательный механизм представляет собой вращающийся механизм 5, например, колебательный рычаг 11, соединенный с приводными средствами (например, с двигателем, не показан). Колебательный рычаг 11 соединен на одном конце с валом 7 вращения дозирующего вала 1, а на другом конце с другим валом 8 вращения транспортирующего вала 2. Колебательный рычаг 11 приводится в колебательное движение вокруг вала 7 вращения дозирующего вала 1. Транспортирующий вал 2 приводится в движение вдоль колебательной орбиты посредством работы приводных средств и колебательного рычага 11. Приводные средства дополнительно ограничивают аксиальное движение колебательного рычага 11 между выбранными пределами, определяющими угловой сектор 6. Таким образом, транспортирующий вал 2 вращается туда и обратно вокруг окружности 9 дозирующего вала 1 в угловом секторе 6, определяемом зацепленным и удаленным положениями P1 и P2, и с центром на валу 7 вращения дозирующего вала 1. Вал 7 вращения дозирующего вала 1 совпадает с осью дозирующего вала.
[0046] Второй вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.3 и 4. Фиг.3 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.6 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно второму варианту осуществления отличается от первого варианта осуществления тем, что дополнительный транспортирующий вал 4 располагается между опорным валом 3 и транспортирующим валом 2. Дополнительный транспортирующий вал 4 находится в постоянном контакте с движущимся полотном 20 и опорным валом 3 при любом положении транспортирующего вала 2. Опорный вал 3 и дополнительный транспортирующий вал 4 приводятся во вращение в соответствующих направлениях, показанных стрелками 3a и 4a, с помощью соответствующего двигателя и механизма передач (не показан). Дозирующий вал 1 и транспортирующий вал 2 вращаются в противоположных направлениях. Подобно первому варианту осуществления, только когда транспортирующий вал 2 находится в зацепленном положении (Фиг.1), устанавливается контакт с дополнительным транспортирующим валом 4. В зацепленном положении, транспортирующий вал 2 наносит материал 21 покрытия на полотно 20 поглощающей подложки с помощью дополнительного транспортирующего вала 4 в положении контакта. В зацепленном положении P1, последовательность контакта между камерным ракелем 30, дозирующим валом 1, транспортирующим валом 2, дополнительным транспортирующим валом 4 и движущимся полотном 20 поглощающей подложки и опорным валом 3 дает в результате достаточное и однородное нанесение материала 21 покрытия на полотно 20. Продолжительность существования зацепленного положения P1 определяет длину покрытия L, где материал 21 покрытия нанесен на полотно 20 поглощающей подложки. Этот вариант осуществления, где полотно 20 поглощающей подложки движется между опорным валом 3 и дополнительным транспортирующим валом 4, делает возможным уменьшение риска разрушения полотна, когда транспортирующий вал 2 вступает в зацепление с дополнительным транспортирующим валом 4, демпфируя воздействие перехода между удаленным положением и зацепленным положением.
[0047] Третий вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.5 и 6. Фиг.5 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.6 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно третьему варианту осуществления основано на камерном ракеле и отличается от первого варианта осуществления тем, что вращающийся механизм заменен механизмом 15 прямолинейного движения.
[0048] По настоящему варианту осуществления, колебательный механизм представляет собой механизм 15 прямолинейного движения, он выполнен с возможностью придания колебательного движения посредством прямолинейного движения транспортирующего вала 2 вместе с дозирующим валом 1 и камерным ракелем 30 на определенное расстояние 16 от зацепленного положения P1 (Фиг.5) до удаленного положения P2 (Фиг.6). Расстояние 16 определяется крайними зацепленными и удаленными положениями P1 и P2, соответственно.
[0049] Зацепленное положение P1 (Фиг.5) соответствует положению, где полотно 20 поглощающего материала вступает в контакты как с опорным валом 3, так и с транспортирующим валом 2. На практике, полотно 20 поглощающего материала движется через зазор между опорным валом 3 и транспортирующим валом 2. Указанный зазор достаточно узкий, так что полотно вступает в контакт как с опорным валом 3, на одной стороне, так и с транспортирующим валом 2, на другой стороне. Это положение определяет положение контакта, где материал 21 покрытия может наноситься на движущееся полотно 20 поглощающего материала.
[0050] Удаленное положение P2 (Фиг.6) соответствует положению, где транспортирующий вал 2, дозирующий вал 3 и камерный ракель 30 находятся вдали от опорного вала 3. В этом положении, полотно 20 поглощающего материала движется над опорным валом 3 и не вступает в контакт с транспортирующим валом 2. При колебании от зацепленного положения P1 до удаленного положения P2, транспортирующий вал 2, дозирующий вал 3 и камерный ракель 30 передвигаются прямолинейно на определенное расстояние 16 соответствующее различным положениям. В настоящем описании, удаленное положение также соответствует этим различным положениям между зацепленным положением P1 и удаленным положением P2, где транспортирующий вал 2, дозирующий вал 3 и камерный ракель 30 находятся вдали от опорного вала 3 и от движущегося полотна 20 поглощающего материала, так что материал 21 покрытия не может наноситься на движущееся полотно 20 поглощающего материала.
[0051] В итоге, только когда транспортирующий вал 2, дозирующий вал 3 и камерный ракель 30 находятся в зацепленном положении (Фиг.5) относительно опорного вала 3, транспортирующий вал 2 наносит материал 21 покрытия на полотно 20 поглощающей подложки в положении контакта. В зацепленном положении P1, последовательность контакта между камерным ракелем 30, дозирующим валом 1, транспортирующим валом 2, движущимся полотном 20 поглощающей подложки и опорным валом 3 дает в результате достаточное и однородное нанесение материала 21 покрытия на полотно 20. Подобно другим вариантам осуществления, продолжительность существования зацепленного положения P1 определяет длину покрытия L, где материал 21 покрытия наносится на полотно 20 поглощающей подложки. Кроме того, синхронизация прямолинейного движения определяет нанесение материала покрытия относительно конкретных положений вдоль полотна, и, в частности, относительно головного края и/или хвостового края частей полотна, которые впоследствии сформируют рулоны розничных размеров.
[0052] По настоящему варианту осуществления, колебательный механизм представляет собой механизм 15 прямолинейного движения, например, опорный элемент 17 движущийся в направляющей 18, соединенный с приводными средствами (например, двигателем, не показан). Опорный элемент 17 поддерживает камерный ракель 30, дозирующий вал 1 и транспортирующий вал 2, так что их соответствующие положения определены и фиксированы. Опорный элемент 17 приводится в колебательное движение посредством прямолинейного движения вдоль направляющей 18. Опорный элемент 17 приводится в движение на определенном расстоянии 16 посредством работы приводных средств. Кроме того, приводные средства ограничивают прямолинейное движение опорного элемента 17 между выбранными пределами, определяющими расстояние 16. Таким образом, камерный ракель 30, дозирующий вал 1 и транспортирующий вал 2 движутся прямолинейно вперед и назад на расстояние 16, определяемое зацепленным и удаленным положениями P1 и P2.
[0053] Четвертый вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.7 и 8. Фиг.7 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.8 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно четвертому варианту осуществления основано на камерном ракеле и отличается от третьего варианта осуществления тем, что дополнительный транспортирующий вал 4 располагается между опорным валом 3 и транспортирующим валом 2. Дополнительный транспортирующий вал 4 находится в постоянном контакте с движущимся полотном 20 и опорным валом 3, в каком бы положении не находились транспортирующий вал 2, дозирующий вал 1 и камерный ракель 30. Функции и работа дополнительного транспортирующего вала 4 сходны со вторым вариантом осуществления. Как описано ранее в связи с третьим вариантом осуществления, механизм 15 прямолинейного движения выполнен с возможностью придания колебательного движения посредством прямолинейного движения транспортирующего вала 2 вместе с дозирующим валом 1 и камерным ракелем 30 на определенное расстояние 16 от зацепленного положения P1 (Фиг.7) до удаленного положения P2 (Фиг.8). Расстояние 16 определяется крайними зацепленным и удаленным положениями P1 и P2, соответственно. В то время как в третьем варианте осуществления (смотри Фиг.6 и 7), транспортирующий вал 2 совмещен с дозирующим валом 1 и камерным ракелем 30, в четвертом варианте осуществления ось 8 транспортирующего вала 2 отступает на некоторое расстояние от совмещенных дозирующего вала 1 и камерного ракеля 30. В этом случае, опорный элемент 17 может конструироваться как имеющий две секции соответствующим образом наклоненных относительно друг друга.
[0054] Фиг.9 представляет собой вид сбоку, схематически иллюстрирующий альтернативу первому варианту осуществления (то есть, варианту осуществления на Фиг.1 и 2), где камерный ракель 30 и дозирующий вал 1 заменены распылительным узлом 31, колебательный рычаг 11 вращающегося механизма 5 приводится в колебательное движение вокруг шарнира 27. Фиг.10 представляет собой вид сбоку, схематически иллюстрирующий альтернативу первому варианту осуществления, где камерный ракель 30 и дозирующий вал 1 заменены щелевой фильерой 32. В остальном работа этих альтернативных вариантов осуществления сходна с первым вариантом осуществления.
[0055] Фиг.11 представляет собой вид сбоку, схематически иллюстрирующий альтернативу второму варианту осуществления (то есть, варианту осуществления на Фиг.3 и 4), где камерный ракель 30 и дозирующий вал 1 заменены распылительным узлом 31, колебательный рычаг 11 вращающегося механизма 5 приводится в колебательное движение вокруг шарнира 27. Фиг.12 представляет собой вид сбоку, схематически иллюстрирующий альтернативу второму варианту осуществления, где камерный ракель 30 и дозирующий вал 1 заменены щелевой фильерой 32. В остальном работа этих альтернативных вариантов осуществления сходна со вторым вариантом осуществления.
[0056] Фиг.13 представляет собой вид сбоку, схематически иллюстрирующий альтернативу третьему варианту осуществления (то есть, варианту осуществления на Фиг.5 и 6), где камерный ракель 30 и дозирующий вал 1 заменены распылительным узлом 31. Фиг.14 представляет собой вид сбоку, схематически иллюстрирующий альтернативу третьему варианту осуществления, где камерный ракель 30 и дозирующий вал 1 заменены щелевой фильерой 32. В остальном работа этих альтернативных вариантов осуществления сходна с третьим вариантом осуществления.
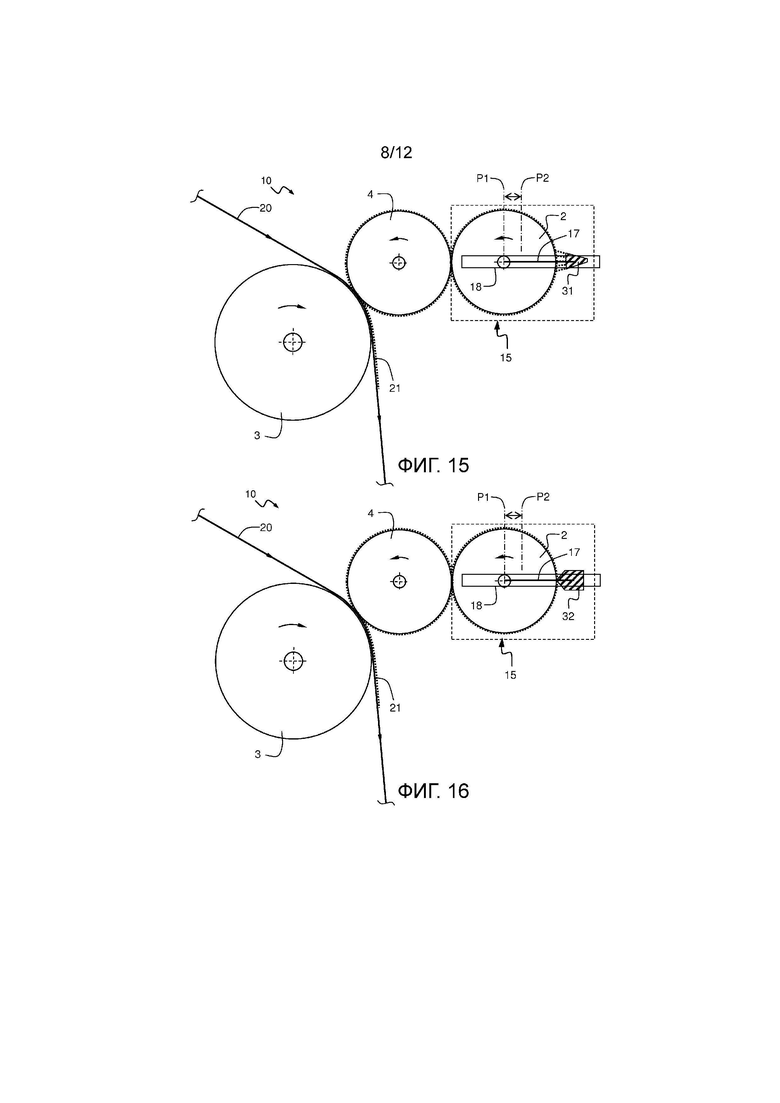
[0057] Фиг.15 представляет собой вид сбоку, схематически иллюстрирующий альтернативу четвертому варианту осуществления (то есть, варианту осуществления на Фиг.7 и 8), где камерный ракель 30 и дозирующий вал 1 заменены распылительным узлом 31. Фиг.16 представляет собой вид сбоку, схематически иллюстрирующий альтернативу четвертому варианту осуществления, где камерный ракель 30 и дозирующий вал 1 заменены щелевой фильерой 32. В остальном работа этих альтернативных вариантов осуществления сходна с четвертым вариантом осуществления.
[0058] Пятый вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.17 и 18. Фиг.17 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.18 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно пятому варианту осуществления основано на камерном ракеле 30 и отличается от описанного выше варианта осуществления тем, что камерный ракель 30, дозирующий вал 1 и транспортирующий вал 2 фиксированы, в то время как опорный вал перемещает полотно 20 поглощающего материала в направлении транспортирующего вала 2. Согласно пятому варианту осуществления, цилиндрический опорный вал 3 заменен эксцентрическим опорным валом 33, например, валом подобным кулачку. Однако любой опорный вал нерегулярной формы был бы удовлетворительным при достижении функции придания колебательного движения полотну 20 поглощающего материала от зацепленного положения P1 (Фиг.19) до удаленного положения P2 (Фиг.20). По настоящему варианту осуществления, колебательный механизм имеет форму эксцентрического опорного вала 33 самого по себе. Только когда полотно 20 поглощающего материала обертывается вокруг эксцентрического опорного вала 33, как показано, с достижением контактного угла 26 в ходе вращения эксцентрического опорного вала 33, полотно 20 поглощающего материала проталкивается в направлении транспортирующего вала 2 и вступает в контакт с транспортирующим валом 2. Когда эксцентрический опорный вал 33 находится в зацепленном положении P1 относительно транспортирующего вала 2, транспортирующий вал 2 наносит материал 21 покрытия на полотно 20 поглощающей подложки в положении контакта. В зацепленном положении P1, последовательность контакта между камерным ракелем 30, дозирующим валом 1, транспортирующим валом 2, движущимся полотном 20 поглощающей подложки и эксцентрическим опорным валом 33 дает в результате достаточное и однородное нанесение материала 21 покрытия на полотно 20. Продолжительность существования зацепленного положения P1 определяет длину покрытия L, где материал 21 покрытия наносится на полотно 20 поглощающей подложки. Альтернативно, длину покрытия L можно контролировать также посредством конструирования формы эксцентрического опорного вала 33 и, в частности, определения контактного угла 26. В пятом варианте осуществления, камерный ракель 30 может заменяться распылительным узлом или щелевой фильерой (не показаны).
[0059] Шестой вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.19 и 20. Фиг.19 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.20 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно шестому варианту осуществления основано на камерном ракеле 30 и отличается от описанных выше первого - четвертого вариантов осуществления тем, что камерный ракель 30, дозирующий вал 1 и транспортирующий вал 2 фиксированы, в то время как опорный вал перемещает полотно 20 поглощающего материала в направлении транспортирующего вала 2. Согласно шестому варианту осуществления, опорный вал 3 заменен колебательным опорным валом 34. По настоящему варианту осуществления колебательный механизм представляет собой вращающийся механизм 35, например, колебательный рычаг 38, соединенный с приводными средствами (например, с двигателем, не показан). Колебательный рычаг 38 соединен на одном краю с валом 29 вращения опорного вала 34, а на другом краю с шарниром 37. Колебательный рычаг 38 приводится в колебательное движение вокруг шарнира 37. Опорный вал 34 приводится в движение по колебательной орбите посредством работы приводных средств и колебательного рычага 38. Приводные средства дополнительно ограничивают аксиальное движение колебательного рычага 38 между выбранными пределами, определяющими угловой сектор 36. Таким образом, опорный вал 34 вращается вперед и назад в угловом секторе 36, определяемом зацепленным и удаленным положениями P1 и P2, и с центром на валу 29 вращения опорного вала 34.
[0060] Седьмой вариант осуществления устройства для нанесения покрытия на полотно поглощающей подложки схематически иллюстрируется на Фиг.21 и 22. Фиг.21 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в зацепленном положении P1. Фиг.22 представляет собой вид сбоку, показывающий устройство 10 для нанесения покрытия на полотно поглощающей подложки в удаленном положении P2. Устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно седьмому варианту осуществления основано на камерном ракеле 30 и отличается от описанных выше первого - четвертого вариантов осуществления тем, что камерный ракель 30, дозирующий вал 1 и транспортирующий вал 2 фиксированы, в то время как опорный вал перемещает полотно 20 поглощающего материала в направлении транспортирующего вала 2. Согласно седьмому варианту осуществления, опорный вал 3 заменен колебательным опорным валом 34. По настоящему варианту осуществления колебательный механизм представляет собой механизм 25 прямолинейного движения, например, вал 29 вращения, движущийся в направляющей 28, соединенный с приводными средствами (например, с двигателем, не показано). Опорный вал 34 прямолинейного движения приводится во вращение вокруг вала 29 вращения, который приводится в колебательное движение посредством прямолинейного движения в направляющей 28 на определенное расстояние 16 от зацепленного положения P1 (Фиг.21) до удаленного положения P2 (Фиг.22). Подобно третьему варианту осуществления, расстояние 16 определяется крайними зацепленным и удаленным положениями P1 и P2, соответственно. Когда опорный вал 34 прямолинейного движения находится в зацепленном положении P1 относительно транспортирующего вала 2, транспортирующий вал 2 наносит материал 21 покрытия на полотно 20 поглощающей подложки в положении контакта. В зацепленном положении P1, последовательность контакта между камерным ракелем 30, дозирующим валом 1, транспортирующим валом 2, движущимся полотном 20 поглощающей подложки и опорным валом 34 прямолинейного движения дает в результате достаточное и однородное нанесение материала 21 покрытия на полотно 20. Продолжительность существования зацепленного положения P1 определяет длину покрытия L, где материал 21 покрытия наносится на полотно 20 поглощающей подложки.
[0061] В пятом, шестом и седьмом вариантах осуществления, камерный ракель 30 может быть заменен распылительным узлом или щелевой фильерой (не показано).
[0062] Во всех описанных выше вариантах осуществления, альтернативы или вариантах, дозирующий вал 1 может представлять собой анилоксовый валик.
[0063] Во всех описанных выше вариантах осуществления, альтернативах или вариантах опорный вал может быть заменен опорной пластиной, как обычно делается в области преобразования полотна поглощающей подложки, в частности, полотна гигиенической бумаги, в продукт гигиены, подобный, например, рулонам туалетной бумаги.
[0064] Фиг.23 представляет собой вид сбоку, схематически иллюстрирующий преобразующее устройство/линию 101, содержащую устройство 10 для нанесения покрытия на полотно поглощающей подложки по настоящему изобретению. На этой иллюстрации преобразующего устройства/линии 101 изображено устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно первому варианту осуществления в зацепленном положении P1. Однако возможно также преобразующее устройство/линия 10, содержащая устройство 10 для нанесения покрытия на полотно поглощающей подложки согласно любому из других вариантов осуществления.
[0065] В этом примере, преобразующее устройство/линия 101 содержит два узла размотки 102 и 103, узел 104 тиснения и устройство 105 перематывания.
[0066] Более конкретно, на стадии на Фиг.23, рулоны-заготовки полотен 20A, 20B поглощающей основы уже изготовлены согласно известному бумагоделательному процессу. Фиг.23 иллюстрирует более позднюю стадию, которая представляет собой стадию, где имеет место процесс преобразования. Процесс преобразования преобразует большие исходные рулоны-заготовки полотен 20A, 20B основы (например, имеющие ширину полосы от приблизительно 1,80 м до приблизительно 7 м) в рулоны 140 розничных размеров, например, рулоны туалетной бумаги, рулоны бумажных полотенец (например, имеющие ширину полосы от приблизительно 8 см до приблизительно 40 см). В этом примере, преобразующее устройство/линия 101 производит рулоны розничных размеров, имеющие два слоя.
[0067] Первый узел 102 перематывания обеспечивает первый рулон-заготовку полотна 20A поглощающей основы из первого исходного рулона 107. Второй узел размотки обеспечивает второй рулон-заготовку полотна 20B поглощающей основы из второго исходного рулона 108. Оба рулона-заготовки полотна 20A, 20B поглощающей основы вводятся в узел 104 тиснения.
[0068] Различные валы 109 располагаются соответствующим образом для контроля пути рулонов-заготовок полотна 20A, 20B поглощающей основы вдоль преобразующего устройства/линии 101, внутри различных узлов 102, 103, 104, 105 и между ними. Рулоны-заготовки полотен 20A, 20B поглощающей основы перемещаются в преобразующее устройство/линию 101 согласно машинному направлению MD от узлов 102 и размотки в направлении узла 104 тиснения и в направлении устройства 105 перематывания.
[0069] Узел 104 тиснения содержит гравированный цилиндр 112, согласующий каучуковый цилиндр 113, оба они вращаются в противоположных направлениях, и распределитель 114 клея. Полотна 20A, 20B поглощающей основы из рулонов-заготовок накладываются друг на друга и объединяются в узле 104 тиснения с формированием полотна 20 поглощающей подложки. Гравированный цилиндр 112 может гравироваться микроструктурированной структурой, объединяющей различные выступы для тиснения (не показано). Гравированный цилиндр 112 может осуществлять простую или двухуровневую гравировку в наложенных друг на друга полотнах 20A, 20B поглощающей основы из рулонов-заготовок. Распределитель 114 клея, как правило, содержит емкость, аппликаторный цилиндр и погружаемый цилиндр. Аппликаторный цилиндр стыкуется с наложенными друг на друга полотнами 20A, 20B поглощающей основы из рулонов-заготовок напротив гравированного цилиндра 112. Погружаемый цилиндр захватывает адгезив в емкости и переносит адгезив на аппликаторный цилиндр. Аппликаторный цилиндр располагается для оказания определенного давления на гравированный цилиндр в дальней области выпуклостей, тисненых полотен 20A, 20B поглощающей основы из рулонов-заготовок. При указанном определенном давлении, адгезив проходит сквозь оба полотна 20A, 20B поглощающей основы из рулонов-заготовок. Это используется для объединения обоих полотен, а также для тиснения или микротиснения по меньшей мере одного из полотен 20A, 20B поглощающей основы из рулонов-заготовок для генерирования эстетических воздействий или для модификации толщины или мягкости, или упругости полученного в результате полотна 20 поглощающей подложки.
[0070] Устройство 10 перематывания содержит перфорирующий модуль 120, режущий модуль 121, намоточный модуль 122 и контрольный модуль 150. Устройство 105 перематывания наматывает полотно 20 поглощающей подложки в виде множества рулонов-заготовок 130.
[0071] Перфорирующий модуль 120 располагается для снабжения полотна 20 поглощающей подложки расположенными на равном расстоянии друг от друга линиями перфорации, ориентированными, по существу, поперечно относительно машинного направления MD (то есть, линии перфорации ориентированы, по существу, согласно поперечному машинному направлению).
[0072] Режущий модуль 121 располагается для фиксации полотна 20 поглощающей подложки, по существу, поперечно относительно машинного направления (то есть, линия разделения ориентируется, по существу, согласно поперечному машинному направлению). Фиксация полотна осуществляется в переходной фазе, а именно, когда первый рулон-заготовка готов в конце цикла производства рулона-заготовки и до того, как второй, следующий рулон-заготовка начинает наматываться в начале нового цикла производства рулона-заготовки.
[0073] Намоточный модуль 122 располагается для намотки полотна 20 поглощающей подложки с получением рулонов-заготовок 130 полотна поглощающей подложки. Например, намоточный модуль 122 принадлежит периферийному или поверхностному типу. Намоточный модуль 122 содержит прокатывающую поверхность 123, первый намоточный вал 124, второй намоточный вал 125, третий намоточный вал 126 и устройство подачи 127 вставок. Рулон-заготовка 130 формируется посредством намотки полотна 20 поглощающей подложки на вставку 141. Вставки 141 последовательно подаются устройством подачи 127 вставок с помощью прокатывающей поверхности 123 перед началом нового цикла изготовления рулона-заготовки. Рулон-заготовка 130 поддерживается в ее положении в ходе намотки с помощью первого, второго и третьего намоточных валов 124, 125, 126, вращающихся в поверхностном контакте с рулоном-заготовкой 130. Один из намоточных валов 124, 125, 126 придает вращательное движение рулону-заготовке 130.
[0074] Контрольный модуль 150 соединен с перфорирующим модулем 120 и режущим модулем 121 посредством интерфейса 151. Контрольный модуль 150 контролирует работу перфорирующего модуля 120 и режущего модуля 121 независимым образом. Например, контрольный модуль 150 выключает перфорирующий модуль 120 и включает режущий модуль 121 в переходной фазе между двумя последовательными рулон-заготовками. Контрольный модуль 150 включает перфорирующий модуль 120 и выключает режущий модуль 121 вне переходных фаз. Например, перфорирующий модуль 120 работает в течение почти приблизительно 99,6% цикла изготовления рулона-заготовки, в то время как режущий модуль 121 работает в течение приблизительно только 0,4% цикла изготовления рулона-заготовки.
[0075] Полученный рулон-заготовка 130 затем режется с помощью множества пил 131 для рулонов-заготовок (видна только одна) на множество отдельных рулонов 140 листа поглощающего материала (виден только один).
[0076] В качестве примера, иллюстрируемое преобразующее устройство/линия 101 показывает два возможных положения устройства 10 для нанесения покрытия на полотно поглощающей подложки. Одно устройство 10 для нанесения покрытия на полотно поглощающей подложки показано расположенным вблизи узла 104 тиснения, другое устройство 10 для нанесения покрытия на полотно поглощающей подложки расположено вблизи узла 105 перематывания и перед ним. Это всего лишь неограничивающие примеры. Можно понять, что преобразующее устройство/линия 101 может содержать только одно устройство 10 для нанесения покрытия на полотно поглощающей подложки, расположенное в узле, который соответствует лучше всего осуществлению задачи нанесения покрытия.
[0077] Чертежи и их предшествующие описания в настоящем документе скорее иллюстрируют, чем ограничивают настоящее изобретение.
[0078] Хотя изобретение описано в связи с различными примерами колебательного механизма, либо вращающегося, либо движущегося прямолинейно с использованием рычага, вала вращения, направляющей, и тому подобное, эти примеры не являются ограничивающими. Специалист легко заметит, что на практике имеются другие пути реализации колебательного механизма.
[0079] Кроме того, хотя чертежи показывают конкретное положение различных валов относительно друг друга, в устройстве для нанесения покрытия, это всего лишь пример, поскольку валы могут располагаться вертикально или в сочетании горизонтальных/вертикальных положений. Также, полотно поглощающей подложки, появляющееся как изображенное и описанное как содержащее один слой, представляет собой только лишь пример, поскольку изобретение можно применять к полотну поглощающей подложки, содержащему два слоя, три или больше слоев. Кроме того, устройство для нанесения покрытия можно использовать для нанесения покрытия на полотно поглощающей подложки независимо от стороны полотна поглощающей подложки, а именно, либо на нижнюю сторону, либо на верхнюю сторону, либо между слоями, когда полотно поглощающей подложки содержит более двух слоев.
[0080] Какие-либо ссылочные обозначения в пунктах формулы изобретения не должны рассматриваться как ограничивающие эти пункты. Слово ʺсодержащийʺ не исключает присутствия элементов иных, чем те, которые перечислены в пункте формулы изобретения. Обозначения единственного числа или выражение ʺпо меньшей мере одинʺ перед элементом не исключает присутствия множества таких элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОРОШКА НА ПОЛОТНО МАТЕРИАЛА | 2006 |
|
RU2329874C2 |
| КРАСКОПОДАЮЩЕЕ УСТРОЙСТВО С КРАСОЧНЫМ НОЖОМ | 2014 |
|
RU2667814C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРИКЛЕИВАНИЯ КОНЦА СМОТАННОГО В РУЛОН МАТЕРИАЛА В ВИДЕ ПОЛОТНА | 1994 |
|
RU2113390C1 |
| ПОГЛОТИТЕЛЬ И ВПИТЫВАЮЩЕЕ ИЗДЕЛИЕ | 2017 |
|
RU2748668C1 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ РОЛИКОВЫМ НОЖОМ И УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ РОЛИКОВЫМ НОЖОМ | 2011 |
|
RU2507012C1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ ФОРМИРУЮЩЕГО МАТЕРИАЛА ПРИ ГЕНЕРАТИВНОМ МЕТОДЕ ИЗГОТОВЛЕНИЯ | 2016 |
|
RU2717802C2 |
| МОДУЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРИКРЕПЛЕНИЯ ПРИСПОСОБЛЕНИЙ ДЛЯ ОТКРЫТИЯ К УПАКОВКАМ С ЛЬЮЩИМИСЯ ПИЩЕВЫМИ ПРОДУКТАМИ | 2006 |
|
RU2422339C2 |
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОРОШКА НА ПОЛОТНО МАТЕРИАЛА | 2008 |
|
RU2380171C1 |
| СПОСОБ ПЕЧАТИ НА ПОДЛОЖКЕ | 1995 |
|
RU2136507C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕКОРАТИВНЫХ ПАНЕЛЕЙ | 2019 |
|
RU2754886C1 |



Изобретение относится к текстильной промышленности, а именно к способу обработки поглощающей подложки из гигиенической бумаги или нетканого материала. Предложено устройство (10) для нанесения покрытия на полотно поглощающей подложки, предназначенное для нанесения материала (21) покрытия на полотно (20) поглощающей подложки на определенной длине, при этом устройство содержит опорное устройство (3), выполненное с возможностью поддержки полотна (20) поглощающей подложки, движущегося со скоростью в пределах от приблизительно 200 м/мин до приблизительно 1200 м/мин; дозирующее и транспортирующее устройство (1, 2), выполненное с возможностью взаимодействия с узлом (30) для хранения и транспортировки материала покрытия таким образом, чтобы непрерывно покрывать поверхность (9) дозирующего и транспортирующего устройства (1, 2) однородным количеством материала покрытия (21); и колебательный механизм, выполненный с возможностью придания колебательного движения дозирующему и транспортирующему устройству (1, 2) или опорному устройству (3) от зацепленного положения (P1) до удаленного положения (P2). Дозирующее и транспортирующее устройство (1, 2) расположено относительно опорного устройства (3) таким образом, что транспортирующее устройство (1, 2) наносит материал (21) покрытия на полотно (20) поглощающей подложки в положении контакта, в котором полотно (20) из поглощающего материала вступает в контакт с опорным устройством (3) и дозирующим и транспортирующим устройством (1, 2) только в зацепленном положении (P1). Технический результат – оптимизация процесса нанесения покрытия на полотно поглощающей подложки в преобразующем устройстве, оптимизация экономического эффекта, а также обеспечение возможности дискретного или периодического нанесения покрытия на движущееся полотно поглощающей подложки. 4 н. и 14 з.п. ф-лы, 23 ил. 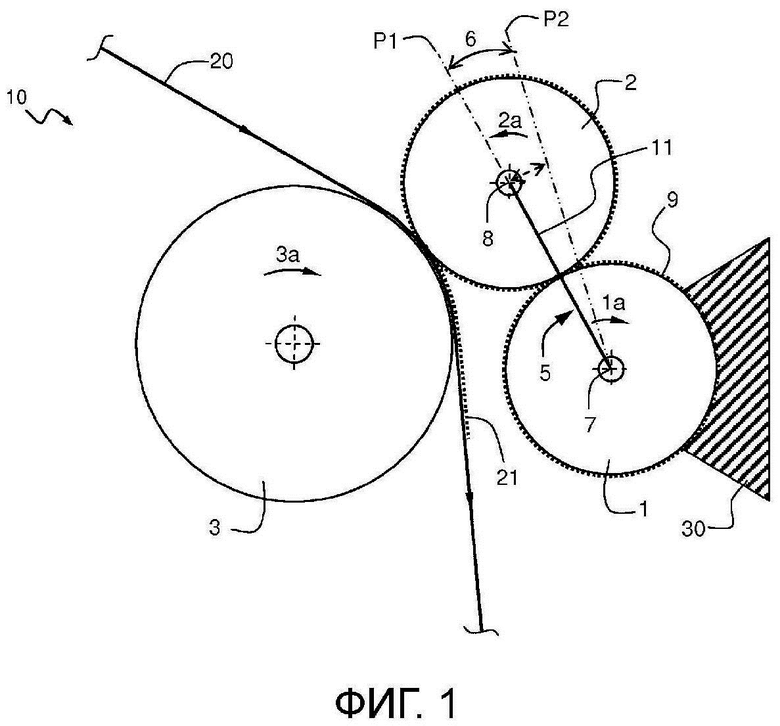
1. Устройство (10) для нанесения покрытия на полотно поглощающей подложки, предназначенное для нанесения материала (21) покрытия на полотно (20) поглощающей подложки на определенной длине (L), содержащее:
- опорное устройство (3, 33, 34), выполненное с возможностью поддержки полотна (20) поглощающей подложки, движущегося со скоростью в пределах от приблизительно 200 м/мин до приблизительно 1200 м/мин,
- дозирующее и транспортирующее устройство (1, 2), выполненное с возможностью взаимодействия с узлом (30, 31, 32) для хранения и транспортировки материала покрытия с тем, чтобы непрерывно покрывать поверхность (9) дозирующего и транспортирующего устройства (1, 2) однородным количеством материала (21) покрытия, и
- колебательный механизм (5, 15, 25, 35), выполненный с возможностью придания колебательного движения дозирующему и транспортирующему устройству (1, 2) или опорному устройству (3, 33, 34) от зацепленного положения (P1) до удаленного положения (P2),
при этом дозирующее и транспортирующее устройство (1, 2) расположено относительно опорного устройства (3, 33, 34) таким образом, что транспортирующее устройство (1, 2) наносит материал (21) покрытия на полотно (20) поглощающей подложки в положении контакта, в котором полотно (20) из поглощающего материала вступает в контакт с опорным устройством (3, 33, 34) и с дозирующим и транспортирующим устройством (1, 2) только в зацепленном положении (P1).
2. Устройство для нанесения покрытия на полотно поглощающей подложки по п.1, в котором
- опорное устройство представляет собой опорный вал (3, 33, 34) или опорную пластину и
- дозирующее и транспортирующее устройство содержит транспортирующий вал (2).
3. Устройство для нанесения покрытия на полотно поглощающей подложки по п.2, в котором дозирующее и транспортирующее устройство дополнительно содержит дозирующий вал (1), причем дозирующий вал (1) выполнен с возможностью взаимодействия с узлом (30, 31, 32) для хранения и транспортировки материала покрытия таким образом, чтобы непрерывно покрывать поверхность (9) дозирующего вала (1) однородным количеством материала (21) покрытия, и транспортирующий вал (2) соединен с дозирующим валом (1) таким образом, чтобы транспортировать материал (21) покрытия с дозирующего вала (1) на транспортирующий вал (2).
4. Устройство для нанесения покрытия на полотно поглощающей подложки по п.3, в котором колебательный механизм содержит вращающийся механизм (5), выполненный с возможностью придания транспортирующему валу (2) вращения вокруг окружности (9) дозирующего вала (1) в угловом секторе (6), определяемом зацепленным (P1) и удаленным (P2) положениями, и с центром на валу (7) вращения дозирующего вала (1).
5. Устройство для нанесения покрытия на полотно поглощающей подложки по п.3, в котором колебательный механизм содержит механизм (15) прямолинейного движения, выполненный с возможностью придавать дозирующему валу (1) и транспортирующему валу (2) прямолинейное движение на расстояние (16), определяемое зацепленным положением (P1) и удаленным положением (P2).
6. Устройство для нанесения покрытия на полотно поглощающей подложки по любому из пп.2-5, в котором дополнительный транспортирующий вал (4), расположенный между опорным валом (3, 33, 34) и транспортирующим валом (2), находится в постоянном контакте с опорным валом (3) при любом положении транспортирующего вала (2).
7. Устройство для нанесения покрытия на полотно поглощающей подложки по п.2, в котором опорный вал представляет собой эксцентрический вал (33).
8. Устройство для нанесения покрытия на полотно поглощающей подложки по п.2, в котором колебательный механизм содержит другой вращающийся механизм (35), содержащий колебательный рычаг (38), соединенный на одном краю с валом (29) вращения опорного вала (34), а на другом краю с шарниром (37), причем вращающийся механизм (35) выполнен с возможностью придания опорному валу (34) вращательного движения в угловом секторе (36), определяемом зацепленным (P1) и удаленным положениями (P2) и с центром на шарнире (37).
9. Устройство для нанесения покрытия на полотно поглощающей подложки по п.2, в котором колебательный механизм содержит другой механизм (25) прямолинейного движения, выполненный с возможностью придания опорному валу (34) прямолинейного движения на расстоянии (16), определяемом зацепленным (P1) и удаленным (P2) положениями.
10. Устройство для нанесения покрытия на полотно поглощающей подложки по любому из пп.1-9, в котором узел для хранения и транспортировки материала покрытия выбирают из группы, состоящей из камерного ракеля (30), распылительного узла (31) и щелевой фильеры (32).
11. Преобразующее устройство (101), содержащее узел (104) тиснения и/или узел (105) перематывания, где преобразующее устройство (101) дополнительно содержит устройство (10) для нанесения покрытия на полотно поглощающей подложки по любому из пп.1-10, расположенное вблизи узла (104) тиснения и/или расположенное вблизи узла (105) перематывания и перед ним.
12. Применение преобразующего устройства по п.11 для изготовления продуктов в виде поглощающих листов, выбранных из группы, содержащей пеленки, полотенца, кухонные полотенца, полотенца для рук, туалетную бумагу, салфетки и косметические салфетки.
13. Способ нанесения покрытия на полотно поглощающей подложки, предназначенный для нанесения материала (21) покрытия на полотно (20) поглощающей подложки на определенной длине (L), включающий:
- перенос полотна (20) поглощающей подложки со скоростью в пределах от приблизительно 200 м/мин до приблизительно 1200 м/мин и поддержку переносимого полотна (20) поглощающей подложки с помощью опорного устройства (3, 33, 34),
- непрерывное покрытие поверхности (9) дозирующего и транспортирующего устройства (1, 2) однородным количеством материала (21) покрытия с помощью узла (30, 31, 32) хранения и транспортировки материала покрытия, взаимодействующего с дозирующим и транспортирующим устройством (1, 2),
- осуществление колебаний дозирующего и транспортирующего устройства (1, 2) или опорного устройства (33, 34) от зацепленного положения (P1) до удаленного положения (P2) и
- нанесение материала (21) покрытия на полотно (20) поглощающей подложки в положении контакта, в котором полотно (20) поглощающей подложки вступает в контакт с опорным устройством (3, 33, 34) и дозирующим и транспортирующим устройством (1, 2) только в зацепленном положении (P1).
14. Способ нанесения покрытия на полотно поглощающей подложки по п.13, в котором дозирующее и транспортирующее устройство содержит транспортирующий вал (2) и стадия осуществления колебаний включает вращение транспортирующего вала (2) в угловом секторе (6), определяемом зацепленным положением (P1) и удаленным положением (P2).
15. Способ нанесения покрытия на полотно поглощающей подложки по п.13, в котором дозирующее и транспортирующее устройство содержит транспортирующий вал (2) и стадия осуществления колебаний включает прямолинейное движение транспортирующего вала (2) на расстояние (16), определяемое зацепленным положением (P1) и удаленным положением (P2).
16. Способ нанесения покрытия на полотно поглощающей подложки по п.13, в котором опорное устройство представляет собой опорный вал (3, 33, 34) и стадия осуществления колебаний включает эксцентрическое вращение опорного вала (33), зацепленное положение (P1) соответствует заданному угловому сектору (26) опорного вала (33).
17. Способ нанесения покрытия на полотно поглощающей подложки по п.13, в котором опорное устройство представляет собой опорный вал (3, 33, 34) и стадия осуществления колебаний включает вращение опорного вала (33) в угловом секторе (26, 36), определяемом зацепленным положением (P1) и удаленным положением (P2).
18. Способ нанесения покрытия на полотно поглощающей подложки по п.13, в котором опорное устройство представляет собой опорный вал (3, 33, 34) и стадия осуществления колебаний включает участие опорного вала с прямолинейным движением (34) на расстояние (16), определяемое зацепленным положением (P1) и удаленным положением (P2).
| СРЕДСТВО И СПОСОБ УДАЛЕНИЯ ВОЛОС И ОРОГОВЕВШЕГО СЛОЯ НА ТЕЛЕ ЧЕЛОВЕКА | 2005 |
|
RU2292199C1 |
| US 4282275 A, 04.08.1981 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЯМОГО НАНЕСЕНИЯ ТОНКОСЛОЙНОГО ПОКРЫТИЯ | 2000 |
|
RU2254937C2 |

