Область техники
Настоящее описание в целом относится к способам и системам для определения относительной влажности посредством ультразвуковых датчиков или иных средств и регулирования одного или более параметров работы транспортного средства в зависимости от результата определения влажности.
Уровень техники и раскрытие изобретения
На автомобильном транспортном средстве, например, гибридно-электрическом транспортном средстве ГЭТС (HEV), могут быть установлены один или более ультразвуковых датчиков с возможностью определения расстояния между датчиком и внешним объектом. Такой ультразвуковой датчик может состоять по меньшей мере из пьезоэлектрического диска и мембраны с возможностью преобразования электрической энергии в механическую и механической энергии в электрическую. А именно, на пьезодиск может быть подано колеблющееся напряжение, заставляющее пьезодиск и мембрану вибрировать и генерировать ультразвуковые волны с частотой, зависящей от частоты колебания напряжения. Испустив волны, датчик ожидает возврата отраженных волн от объектов, и, когда отраженные волны вступают во взаимодействие с датчиком/мембраной, они побуждают мембрану вибрировать. Пьезодиск, прикрепленный к мембране, преобразует вибрацию в напряжение, и из временного интервала направления и приема ультразвуковой волны можно вывести показатель расстояния до объекта.
Например, ультразвуковой датчик в транспортном средстве может служить для определения расстояния между транспортным средством и препятствием во время частично или полностью автоматизированной парковки. Однако на оптимальную работу ультразвукового датчика может отрицательно повлиять ряд факторов. В их число могут входить: температура, влажность, угол поверхности цели и шероховатость отражающей поверхности. Из этих четырех переменных, в транспортном средстве может быть трудно определить влажность, в частности - если транспортное средство не содержит специально предназначенный для этого датчик влажности.
Заявка на патент США 20060196272 предусматривает применение ультразвукового датчика, выполненного с возможностью передачи на двух разных частотах и оценки влажности по разности потерь на затухание, полученной для этих двух разных частот. Однако авторы настоящего изобретения выявили потенциальные недостатки таких систем. В качестве одного примера, в заявке на патент США 20060196272 не предложены способы выбора того, какой ультразвуковой датчик применить для выполнения измерения относительной влажности, если на транспортном средстве расположено множество ультразвуковых датчиков.
Кроме того, в некоторых примерах посредством ультразвуковых датчиков можно обнаруживать объект, расположенный вблизи задней части транспортного средства, например - перед осуществлением процесса регенерации фильтра твердых частиц дизельного двигателя ФТЧДД (DPF) в транспортном средстве, работающем на дизельном топливе. А именно, заявка на патент США 2012/0023910 предусматривает управление регенерацией ФТЧДД в зависимости от того, обнаружен ли какой-либо объект в пределах порогового расстояния от выхлопной трубы транспортного средства. Однако авторы настоящего изобретения выявили потенциальные недостатки такой системы. Например, заявка на патент США 2012/0023910 не предусматривает возможность коррекции порогов расстояния для управления событиями регенерации ФТЧДД.
Поэтому авторы настоящего изобретения разработали системы и способы для по меньшей мере частичного преодоления вышеуказанных недостатков. В одном примере предложен способ, содержащий шаги, на которых: выбирают один из множества датчиков, расположенных по периметру автотранспортного средства; передают множество сигналов от выбранного датчика, каждый на разной частоте; принимают отраженные сигналы переданных сигналов; определяют значения затухания только для каждого из отраженных сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема; определяют разности между парами значений затухания; и преобразуют разности в показатель относительной влажности.
В качестве одного примера, способ содержит шаги, на которых: осуществляют регенерацию фильтра твердых частиц, соединенного с низом кузова автотранспортного средства, путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего горячие газы выходят из задней части автотранспортного средства; выбирают выбранный датчик на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории горячих газов, выходящих из задней части автотранспортного средства; и отсрочивают или прерывают регенерацию в связи с наличием объекта в пределах заранее заданного расстояния от горячих газов, выходящих из задней части автотранспортного средства. В одном примере способ может дополнительно содержать шаги, на которых: измеряют температуру воздуха вблизи места выхода горячих газов из задней части автотранспортного средства; определяют теплопроводность воздуха по меньшей мере частично по результатам определения относительной влажности и температуры воздуха; и корректируют порог расстояния для процесса регенерации, причем коррекция порога расстояния включает в себя уменьшение порога расстояния при уменьшении теплопроводности, и увеличение порога расстояния при увеличении теплопроводности. Это позволяет выбрать подходящий датчик из множества ультразвуковых датчиков для определения относительной влажности с возможностью определения результата измерения относительной влажности. Кроме того, в зависимости от результата измерения относительной влажности можно корректировать порог расстояния для регенерации ФТЧДД, в результате чего события регенерации ФТЧДД можно будет осуществлять чаще.
Вышеуказанные и иные преимущества и признаки раскрываемого изобретения станут очевидны из нижеследующего раздела «Осуществление изобретения» при его рассмотрении по отдельности или совместно с прилагаемыми чертежами.
Следует понимать, что вышеприведенное краткое раскрытие служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание фигур чертежа
ФИГ. 1 схематически изображает двигатель внутреннего сгорания.
На ФИГ. 2 представлена блок-схема компонентов системы транспортного средства, в которой ультразвуковой датчик (датчики) задействован в выполнении частично автоматизированных парковочных маневров транспортного средства или управлении ими.
ФИГ. 3А изображает диаграмму, иллюстрирующую влияния влажности и ультразвуковой частоты на затухание звука.
ФИГ. 3В изображает диаграмму, иллюстрирующую разность затухания звука для разных ультразвуковых частот при той или иной относительной влажности.
На ФИГ. 3С в графической форме раскрыт пример функции преобразования для определения относительной влажности в зависимости от разности затухания звука для двух ультразвуковых частот.
ФИГ. 4 изображает высокоуровневый пример способа для выполнения определения относительной влажности посредством ультразвукового датчика.
ФИГ. 5 изображает высокоуровневый пример способа для выполнения алгоритма изменения частоты, используемого ультразвуковым датчиком, в качестве подпроцесса способа на ФИГ. 4.
ФИГ. 6 изображает высокоуровневый пример способа для выполнения вычисления дельты затухания в качестве подпроцесса способа на ФИГ. 4.
ФИГ. 7 изображает высокоуровневый пример способа для использования одной или более бортовых камер для выбора подходящего ультразвукового датчика для выполнения измерения относительной влажности.
ФИГ. 8 изображает принципиальную схему примера УДКОГ.
ФИГ. 9 изображает высокоуровневый пример способа для ситуативного выполнения измерения влажности посредством либо кислородного датчика, либо ультразвукового датчика, в зависимости от параметров окружающей среды или работы транспортного средства.
ФИГ. 10 изображает диаграмму, иллюстрирующую изменение теплопроводности воздуха в зависимости от температуры и влажности окружающей среды.
ФИГ. 11 изображает высокоуровневый пример способа для выполнения процесса регенерации фильтра твердых частиц дизельного двигателя в зависимости от того, обнаружен ли какой-либо объект в зоне, близкой к выхлопной трубе транспортного средства.
ФИГ. 12 изображает высокоуровневый пример способа для коррекции порога определения расстояния для ультразвукового датчика.
На ФИГ. 13 раскрыт пример табулированной зависимости с возможностью использования совместно со способом на ФИГ. 12 для выбора оптимальной ультразвуковой частоты (частот) для измерений расстояния в зависимости от скорректированных порогов определения расстояния.
На ФИГ. 14 раскрыт пример временного интервала для выполнения процесса определения влажности на основе параметров работы транспортного средства.
На ФИГ. 15 раскрыт пример временного интервала для события регенерации ФТЧДД, причем условия для события регенерации могут по меньшей мере частично зависеть от результата определения влажности окружающей среды.
Осуществление изобретения
Нижеследующее описание относится к системам и способам для выполнения измерений относительной влажности и регулирования параметров работы транспортного средства в зависимости от результата определения относительной влажности. Эти измерения может осуществлять система транспортного средства, содержащая двигатель внутреннего сгорания, причем транспортное средство также может быть выполнено с одной или более бортовыми камерами и ультразвуковым датчиком (датчиками), например - как система транспортного средства на ФИГ. 1. В некоторых примерах транспортное средство может представлять собой гибридное транспортное средство с возможностью работы в течение продолжительных периодов времени без эксплуатации двигателя. Наличие сведений об относительной влажности позволяет улучшить такие функции, как процессы частично или полностью автоматизированной парковки, причем возможность данных процессов обеспечивает система автоматизированной парковки на ФИГ. 2. В некоторых примерах результаты измерения влажности можно определять с помощью ультразвукового датчика из зависимости между затуханием звука, относительной влажностью и ультразвуковой частотой, как показано на ФИГ. 3А. Например, разность затухания звука для той или иной пары частот позволяет оценить влажность окружающей среды, как указано на ФИГ. 3В. Такую оценку можно выполнять с помощью функции преобразования, графически представленной на ФИГ. 3С.
ФИГ. 4 иллюстрирует пример высокоуровневого способа для выполнения измерения влажности посредством ультразвукового датчика. В качестве подпроцесса способа на ФИГ. 4 можно применять алгоритм изменения частоты на ФИГ. 5 для определения затухания звука для двух или более ультразвуковых частот с возможностью последующего вычисления дельты затухания, как раскрыто на ФИГ. 6. Выполнение алгоритма изменения частоты и вычисление дельты затухания позволяют определить результат измерения относительной влажности.
В некоторых примерах одна или более бортовых камер могут служить для выявления подходящих целевых объектов для выполнения процесса определения влажности посредством ультразвукового датчика. Соответствующий способ для обнаружения подходящих объектов с помощью одной или более камер раскрыт на ФИГ. 7.
В дополнительных примерах некоторые условия могут не быть оптимальными для определения влажности посредством ультразвукового датчика, в связи с чем могут быть нужны другие средства, и наоборот. Например, кислородный датчик во впускном или выпускном коллекторе двигателя транспортного средства можно применять вместо ультразвукового датчика для определения влажности при определенных условиях работы транспортного средства. Пример такого кислородного датчика раскрыт на ФИГ. 8, а пример способа для осуществления выбора между кислородным датчиком и ультразвуковым датчиком для выполнения измерения влажности в зависимости от параметров работы транспортного средства раскрыт на ФИГ. 9.
В некоторых примерах система транспортного средства на ФИГ. 1 может содержать дизельный двигатель и, в связи с этим, фильтр твердых частиц дизельного двигателя (ФТЧДД) для улавливания и накопления сажи из двигателя. Регенерация такого фильтра может происходить при высоких температурах отработавших газов, поэтому в некоторых примерах может перед выполнением процесса регенерации быть нужно проверить, находится ли какой-либо объект в пределах близкого расстояния от выхлопной трубы. Кроме того, в некоторых примерах пороги расстояния для объекта можно корректировать в зависимости от относительной влажности и температуры в месте вблизи выхлопной трубы. Например, теплопроводность воздуха может зависеть от влажности и температуры, как видно из диаграммы на ФИГ. 10. Поэтому в некоторых примерах порог расстояния для объекта можно корректировать в зависимости от результата определения теплопроводности воздуха согласно способу на ФИГ. 11. Например, коррекция порога расстояния позволяет выполнять процессы регенерации ФТЧДД чаще.
Как сказано выше, влажность может представлять собой шум-фактор для рабочего диапазона ультразвукового датчика. Поэтому в некоторых примерах наличие сведений о влажности окружающей среды позволяет улучшить рабочий диапазон ультразвукового датчика. В одном примере порог определения расстояния можно корректировать по способу на ФИГ. 12. Например, коррекция порога определения расстояния может включать в себя определение подходящих частот для выполнения измерения расстояния посредством ультразвукового датчика. В таком примере можно применить табулированную зависимость, например, табулированную зависимость на ФИГ. 13, совместно со способом на ФИГ. 12 для определения оптимальной частоты для необходимого рабочего диапазона ультразвукового датчика.
Примеры временных интервалов для выбора методики определения влажности в зависимости от режимов работы транспортного средства и для выполнения процесса регенерации ФТЧДД в зависимости по меньшей мере частично от результата определения влажности раскрыты на ФИГ. 14 и ФИГ. 15 соответственно.
ФИГ. 1 представляет собой принципиальную схему, изображающую один из цилиндров многоцилиндрового двигателя 10 в системе 100 двигателя. Система 100 двигателя может входить в состав силового агрегата системы 101 автодорожного транспортного средства. Датчик 127 температуры наружного воздуха ТНВ (ОАТ) может быть расположен на наружной стороне системы 101 транспортного средства. Датчик ТНВ выполнен с возможностью оценки температуры воздуха окружающей среды с возможностью использования ее результатов для эксплуатации двигателя, кроме того, в некоторых примерах датчик 127 ТНВ может служить для запуска измерений влажности в связи с изменением температуры окружающей среды. В некоторых примерах одна или более камер 186 могут быть расположены в одном или более положениях (например, местах) на транспортном средстве и быть выполнены с возможностью получения изображений, в том числе, без каких-либо ограничений, среды, окружающей транспортное средство. В некоторых примерах один или более датчиков (например, 187) камеры могут быть выполнены с возможностью выдачи данных о положении, относящихся к одной или более камерам 186. Например, если камера выполнена с возможностью поворачивания, датчик (датчики) 187 камеры могут сообщать о направлении, в котором обращена камера, контроллеру транспортного средства (например, 12). В других примерах, где камера не выполнена с возможностью поворачивания, датчик (датчики) 187 камеры также может быть выполнен с возможностью указания положения камеры и направления, в котором она обращена. Кроме того, один или более ультразвуковых датчиков 185 могут быть расположены в одном или более положениях на транспортном средстве и быть выполнены с возможностью измерения расстояния от ультразвукового датчика (датчиков) до целевого объекта. Например, ультразвуковой датчик может быть выполнен с возможностью передачи и приема сигналов в форме звуковых волн. В некоторых примерах ультразвуковой датчик (датчики) выполнены с возможностью самостоятельного обнаружения целевого объекта. В других примерах целевой объект может обнаруживать одна или более камер, после чего с помощью ультразвукового датчика (датчиков) можно выполнить измерение расстояния между ультразвуковым датчиком (датчиками) и целевым объектом. В дополнительных примерах, подробнее раскрытых ниже, ультразвуковой датчик (датчики) могу служить для получения результатов измерения относительной влажности. Например, определенные условия могут стать основанием для запроса измерения относительной влажности, причем в их число могут входить: изменение температуры больше заранее заданного порога температуры, изменение давления окружающей среды больше порога давления окружающей среды, превышение порога времени работы двигателя или порога расстояния пробега транспортного средства с предыдущего (например, последнего по времени) измерения влажности.
А именно, как будет раскрыто ниже, в некоторых примерах ультразвуковой датчик 185 может служить для получения результатов измерения близости между транспортным средством и целевым объектом (объектами) (например, препятствиями) во время работы транспортного средства, например, частично или полностью автоматизированного парковочного маневра. При этом шум-фактором для ультразвукового датчика (датчиков) 185 может быть влажность. Поэтому в некоторых примерах по сведениям об относительной влажности можно корректировать порог обнаружения ультразвукового датчика, что может включать в себя определение подходящих частот для выполнения измерений расстояния с помощью ультразвукового датчика. В дополнительных примерах, наличие сведений об относительной влажности позволяет улучшить параметры работы двигателя, когда такие параметры зависят от точной оценки относительной влажности, как будет раскрыто ниже.
Двигателем 10 можно по меньшей мере частично управлять с помощью системы управления, содержащей контроллер 12, и входных сигналов водителя 132 транспортного средства через устройство 130 ввода. В данном примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали ПП (РР). Камера 30 сгорания (т.е. цилиндр) двигателя 10 может содержать стенки 32 камеры сгорания с расположенным между ними поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращение коленчатого вала. Коленчатый вал 40 может быть соединен с по меньшей мере одним ведущим колесом транспортного средства через промежуточную систему трансмиссии. Кроме того, для обеспечения запуска двигателя 10, с коленчатым валом 40 может быть связан стартер через маховик.
Всасываемый воздух может поступать в камеру 30 сгорания из впускного коллектора 44 через заборный канал 42, а отработавшие газы могут выходить через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут избирательно сообщаться с камерой 30 сгорания через впускной клапан 52 и выпускной клапан 54 соответственно. В некоторых вариантах осуществления камера 30 сгорания может содержать два и более впускных клапана и/или два и более выпускных клапана.
В данном примере впускным клапаном 52 и выпускным клапаном 54 могут управлять системы 51 и 53 кулачкового привода соответственно. Системы 51 и 53 кулачкового привода могут содержать один или более кулачков и могут быть выполнены с возможностью выполнения одной или более из следующих функций: переключение профиля кулачков ППК (CPS), изменение фаз кулачкового распределения ИФКР (VCT), изменение фаз газораспределения ИФГ (VVT) и/или изменение высоты подъема клапанов ИВПК (VVL), которыми может управлять контроллер 12 для регулирования работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 можно определять с помощью датчиков 55 и 57 положения соответственно. В других примерах впускной клапан 52 и/или выпускной клапан 54 могут быть электроприводными. Например, в другом варианте цилиндр 30 может содержать впускной клапан с электроприводом и выпускной клапан с кулачковым приводом, включая системы ППК и/или ИФКР.
Топливная форсунка 66 показана соединенной непосредственно с камерой 30 сгорания для впрыска в нее топлива. Так топливная форсунка 66 обеспечивает известный из уровня техники непосредственный впрыск топлива в камеру 30 сгорания. Топливная форсунка может быть установлена, например, на боковой стороне или сверху от камеры сгорания. Топливо может поступать в топливную форсунку 66 по топливной системе (не показана), содержащей топливный бак, топливный насос и топливную рампу, могущую представлять собой общую топливную рампу.
Впускной коллектор 44 может содержать дроссель 62 с дроссельной заслонкой 64. При этом в других примерах дроссель может быть расположен в заборном канале 42. В данном конкретном примере положение дроссельной заслонки 64 может изменять контроллер 12, направляя сигнал на электромотор или привод в составе дросселя 62; данную конфигурацию обычно называют «электронное управление дроссельной заслонкой» ЭУДЗ (ETC). Таким образом, дроссель 62 выполнен с возможностью регулирования подачи всасываемого воздуха в камеру 30 сгорания среди прочих цилиндров двигателя. Контроллер 12 может получать информацию о положении дроссельной заслонки 64 в виде сигнала положения дросселя ПД (TP). Заборный канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для направления соответствующих сигналов МРВ (MAF) и ДВК (MAP) в контроллер 12.
В некоторых примерах двигатель 10 может дополнительно содержать устройство сжатия, например, турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 162, расположенный по ходу впускного коллектора 44. В случае турбонагнетателя, компрессор 162 может по меньшей мере частично приводить в действие турбина 164 (например, посредством вала), расположенная по ходу выпускного канала 48. В случае нагнетателя, компрессор 162 может по меньшей мере частично приводить в действие двигатель и/или электрическая машина, при этом турбина может отсутствовать. Величину сжатия воздуха (например, наддув), подаваемого в один или более цилиндров двигателя, посредством турбонагнетателя или нагнетателя может изменять контроллер 12. Кроме того, во впускном коллекторе 44 может быть расположен датчик 123 для направления сигнала «НАДДУВ» (BOOST) в контроллер 12.
Двигатель 10 также может содержать систему 150 РОГ высокого давления. Система 150 РОГ высокого давления может содержать канал 152 РОГ, соединенный с выпускным каналом 48 выше по потоку от турбины 164 и с впускным коллектором 44 ниже по потоку от компрессора 162. Система 150 РОГ высокого давления может содержать клапан 154 РОГ, расположенный по ходу канала 152 РОГ для регулирования потока отработавших газов через систему 150 РОГ. Двигатель 10 может также содержать систему 156 РОГ низкого давления. Система 156 РОГ низкого давления содержит канал 158 РОГ, соединенный с выпускным каналом 48 ниже по потоку от турбины 164 и с впускным коллектором 44 выше по потоку от компрессора 162. Система 156 РОГ низкого давления может содержать клапан 160 РОГ, расположенный по ходу канала 152 РОГ для регулирования потока отработавших газов через систему 156 РОГ.
Контроллер 12 показан на ФИГ. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронную среду хранения выполняемых программ и калибровочных значений, в данном примере показанную в виде однокристального запоминающего устройства 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и шину данных. Помимо сигналов, речь о которых шла выше, контроллер 12 может принимать разнообразные сигналы от связанных с двигателем 10 датчиков, в том числе: показание массового расхода всасываемого воздуха (МРВ) от датчика 120 массового расхода воздуха; показание температуры хладагента двигателя ТХД (ЕСТ) от датчика 112 температуры, связанного с рубашкой 114 охлаждения; сигнал профиля зажигания ПЗ (PIP) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 140; положения дросселя (ПД) от датчика положения дросселя; и сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя (в оборотах в минуту) может быть сгенерирован контроллером 12 из сигнала ПЗ. Сигнал давления в коллекторе также может служить для определения разряжения или давления во впускном коллекторе. В число дополнительных датчиков могут входить датчики 187 камер, ультразвуковые датчики 185, датчик 127 ТНВ и т.п.
В носитель информации - постоянное запоминающее устройство 106 - могут быть запрограммированы машиночитаемые данные, представляющие собой инструкции, сохраненные в долговременной памяти, исполняемые микропроцессором 102 для выполнения раскрытых в настоящей заявке способов, а также других предполагаемых, но конкретно не перечисленных вариантов.
Кроме того, контроллер 12 может принимать данные от бортовой навигационной системы 34 (например, глобальной системы определения местоположения (ГСОМ (GPS)), с которой может взаимодействовать водитель транспортного средства. Навигационная система 34 может содержать один или более локационных датчиков, с помощью которых можно оценивать скорость транспортного средства, высоту транспортного средства над уровнем моря, положение/местоположение транспортного средства и т.п. Из этих данных можно выводить параметры работы двигателя, например, местное барометрическое давление. Контроллер 12 также может быть выполнен с возможностью приема данных через интернет или иные сети 13 передачи данных. В некоторых примерах данные, полученные от ГСОМ, можно перекрестно сопоставлять с данными, имеющимися в интернете, для определения местных метеоусловий и т.п.Контроллер 12 может в некоторых примерах использовать интернет для получения обновленных модулей программного обеспечения с возможностью их сохранения в долговременной памяти.
Как сказано выше, на ФИГ. 1 представлен только один цилиндр многоцилиндрового двигателя; при этом следует понимать, что любой цилиндр также может содержать собственный комплект впускных/выпускных клапанов, топливную форсунку, свечу зажигания и т.п.
В некоторых примерах двигатель может представлять собой дизельный двигатель с возможностью сжигания дизельного топлива (например, нефтяного дизельного топлива или биодизельного топлива) за счет воспламенения от сжатия. При этом в других примерах двигатель может не представлять собой дизельный двигатель. Для краткости, на ФИГ. 1 изображен двигатель, в котором некоторые компоненты входят в состав дизельного двигателя, а остальные компоненты могут входить в состав либо дизельного двигателя, либо двигателя, отличного от дизельного. Если какой-либо компонент относится к дизельному двигателю, это будет особо указано в продолжении описания ФИГ. 1.
Датчик 126 отработавших газов показан соединенным с выпускным каналом 48 выше по потоку от устройства 70 снижения токсичности выбросов. Датчик 126 может представлять собой любой подходящий датчик с возможностью определения воздушно-топливного отношения отработавших газов, например, линейный кислородный датчик или УДКОГ (универсальный или широкополосный датчик кислорода в отработавших газах), двухрежимный кислородный датчик или ДКОГ (EGO), НДКОГ (HEGO) (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. Вариант осуществления УДКОГ детально раскрыт на примере ФИГ. 8. Данный датчик может служить для оценки влажности окружающей среды при определенных параметрах работы транспортного средства. В некоторых примерах система двигателя может содержать датчики влажности окружающей среды, специально предназначенные для измерения влажности окружающей среды при запуске оценки влажности. Изменение температуры окружающей среды по результатам измерения или оценки датчиком 127 ТНВ и/или датчиком 125 температуры внутреннего воздуха ТВВ (IAT) может служить основанием для запуска измерения влажности. Изменение давления окружающей среды согласно результату оценки датчиком 128 БД (BP) также может служить основанием для запуска измерения влажности. Если разность текущей температуры или давления окружающей среды и температуры или давления окружающей среды в момент получения последнего известного результата измерения влажности превышает порог, может быть запущено измерение влажности. Датчики влажности могут быть расположены в заборном канале 42 и/или выпускном канале 48 выше по потоку от устройства 70 снижения токсичности выбросов. Активное определение влажности в условиях окружающей среды, дающих основание ожидать изменения влажности, вместо ситуативного определения влажности при наличии возможности (или в дополнение к нему) позволяет получить более точный и достоверный результат оценки влажности для управления двигателем и избежать ненужных измерений влажности.
В некоторых примерах оценку влажности можно выполнять посредством либо ультразвуковых датчиков, либо иных средств, например, УДКОГ 126. Этот способ может содержать шаги, на которых: определяют относительную влажность по разностям между парами отраженных сигналов одного ультразвукового датчика, соединенного с транспортным средством, при этом каждый из отраженных сигналов имеет по существу эквивалентное время прохождения от объекта обратно к ультразвуковому датчику; определяют относительную влажность посредством одного или более соединенных с транспортным средством датчиков, отличных от ультразвукового датчика (например, УДКОГ); и выбирают, какой способ определения относительной влажности применить, в зависимости от параметров окружающей среды или работы транспортного средства. Это позволяет получать своевременные и точные результаты оценки влажности и, тем самым, улучшить параметры работы транспортного средства, зависящие от точности результатов оценки влажности.
Устройство 70 снижения токсичности выбросов показано расположенным по ходу выпускного канала 48 ниже по потоку от датчика 126 отработавших газов. Устройство 70 может представлять собой по меньшей мере одно или более из следующих: трехкомпонентный каталитический нейтрализатор, улавливатель обедненных оксидов азота, окислительный каталитический нейтрализатор дизельного двигателя ОКНДД (DOC), нейтрализатор избирательного каталитического восстановления ИКВ (SCR), окислительный каталитический нейтрализатор и т.п. Система подачи аммиака (или мочевины) может быть соединена с нейтрализатором ИКВ или выше по потоку от него для подачи восстановителя в нейтрализатор ИКВ.
В примере, где двигатель представляет собой дизельный двигатель, по меньшей мере один фильтр 72 твердых частиц дизельного двигателя (ФТЧДД) может быть установлен ниже по потоку от устройства 70 снижения токсичности выбросов для улавливания сажи. ФТЧДД может быть изготовлен из различных материалов, в том числе кордиерита, карбида кремния и иной высокотемпературной оксидной керамики. ФТЧДД может иметь ограниченную емкость по саже. Поэтому ФТЧДД можно периодически регенерировать для уменьшения отложений сажи в фильтре и, тем самым, предотвращения снижения эксплуатационных показателей двигателя из-за гидравлического сопротивления, обусловленного скоплением сажи. Регенерацию фильтра можно выполнять путем нагрева фильтра до температуры, при которой выгорание частиц сажи будет быстрее, чем осаждение новых частиц сажи, например, до 400-600°С. В одном примере ФТЧДД может представлять собой каталитический фильтр твердых частиц, содержащий покрытие из пористого оксида драгоценного металла, например, платины, для снижения температуры сгорания сажи и окисления углеводородов и угарного газа до двуокиси углерода и воды.
В примере, где двигатель может представлять собой дизельный двигатель, можно использовать систему 74 подачи углеводородного УВ (НС) восстановителя для подачи УВ из топливного бака или емкости хранения в выпускную систему для выработки тепла для нагрева фильтра 72 твердых частиц для целей регенерации. Взамен или дополнительно можно применять поздний впрыск топлива (например, во время такта выпуска) для повышения температуры отработавших газов.
Температурные датчики 76 и 78 могут быть расположены соответственно выше и ниже по потоку от ФТЧДД 72 в примере, где двигатель транспортного средства представляет собой дизельный двигатель. Температурные датчики 76 и 78, или дополнительные температурные датчики, также могут быть расположены в пределах ФТЧДД, или температуру ФТЧДД (или температуру отработавших газов) можно оценивать по параметрам работы, используя модель температуры отработавших газов. Сигнал перепада давления можно определить с помощью датчиков 80 и 82 давления соответственно выше и ниже по потоку от ФТЧДД 72. Следует учесть, что также можно использовать единственный датчик перепада давления для измерения перепада давления на ФТЧДД 72. Также можно использовать одновходовый датчик избыточного давления ОВДИД (SPGS).
Следует понимать, что другие варианты осуществления могут содержать системы снижения токсичности выбросов других конфигураций. Например, устройство 70 снижения токсичности выбросов может быть установлено ниже по потоку от ФТЧДД. Кроме того, в других примерах система снижения токсичности выбросов может содержать множество фильтров твердых частиц дизельного двигателя. В иных примерах система снижения токсичности выбросов может не содержать нейтрализатор ИКВ. Каталитические нейтрализаторы, фильтры и т.п. могут быть заключены в один кожух, либо каждый из них в отдельный кожух. Следует понимать, что возможны многочисленные конфигурации, при этом конфигурация на ФИГ. 1 по своей сути является не более чем примером. Кроме того, как сказано выше, с выпускной системой может быть соединена система впрыска восстановителя (например, аммиака или мочевины) для впрыска мочевины выше по потоку от устройства 70 снижения токсичности выбросов.
Регенерацию ФТЧДД можно осуществлять в соответствии со стратегией регенерационного впрыска. В стратегии регенерационного впрыска может быть реализован профиль впрыска, включающий в себя множество событий впрыска, например, пилотный впрыск топлива, основной впрыск топлива, ранний дожигающий впрыск топлива и/или поздний дожигающий впрыск топлива. Следует понимать, что в других вариантах осуществления вышеуказанные впрыски топлива могут включать в себя множество событий впрыска. Таким образом, ФТЧДД можно регенерировать во время работы двигателя. Например, температуру ниже по потоку от ОКНДД и выше по потоку от ФТЧДД можно приводить к необходимому значению для обеспечения сгорания твердых частиц в ФТЧДД путем регулирования величины указанных нескольких впрысков. В данном примере может быть задана уставка температуры ниже по потоку от ОКНДД и выше по потоку от ФТЧДД для облегчения регенерации ФТЧДД. В дополнительных примерах, температуру ФТЧДД для регенерации ФТЧДД может повышать нагреватель 75.
Как сказано выше, регенерация ФТЧДД, соединенного с низом кузова автотранспортного средства, может включать в себя сжигание твердых частиц (например, сажи), скопившихся в фильтре твердых частиц, в результате чего может происходить выход горячих газов из задней части (например, выхлопной трубы) автотранспортного средства. Поэтому в некоторых примерах может быть нужно проверить наличие признаков того, что какой-либо объект находится на расстоянии меньше порогового от выхлопной трубы. Например, такой объект может быть выявлен посредством одной или более бортовых камер (например, 186), и/или одного или более ультразвуковых датчиков (например, 185). В некоторых примерах выбор ультразвукового датчика для применения при выполнении измерения расстояния между датчиком и объектом может включать в себя выбор датчика на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории горячих газов, выходящих из задней части автотранспортного средства, а также того, что объект находится в пределах траектории передачи выбранного датчика по результатам выявления одной из камер. В подобном случае, если будет определено, что какой-либо объект находится на расстоянии меньше порогового от выхлопной трубы (в пределах порогового расстояния от горячих газов, выходящих из задней части автотранспортного средства), процесс регенерации ФТЧДД может быть отсрочен или, например, прерван. Кроме того, влажность окружающей среды и температура окружающей среды могут повлиять на теплопроводность воздуха, поэтому в некоторых примерах может быть нужно получить результаты измерения температуры и влажности окружающей среды для коррекции порогового расстояния, на котором объект может находиться от выхлопной трубы, с учетом теплопроводности воздуха. А именно, в некоторых примерах теплопроводность воздуха можно определить по результатам определения относительной влажности и температуры воздуха, причем температуру воздуха измеряют вблизи выхода горячих газов из задней части автотранспортного средства, причем коррекция порогового расстояния в зависимости от результата измерения теплопроводности воздуха может включать в себя уменьшение порога расстояния при уменьшении теплопроводности и увеличение порога расстояния при увеличении теплопроводности. Таким образом, процессы регенерации ФТЧДД можно начинать и выполнять чаще, чем при отсутствии возможности коррекции порога расстояния. Кроме того, если будет определено, что какой-либо объект расположен на расстоянии, большем порогового, во время выполнения процесса регенерации можно продолжить отслеживать данный объект и зону вблизи задней части транспортного средства посредством одной или более камер и/или ультразвуковых датчиков. В таком примере, если во время процесса регенерации будет выявлено, что объект или объекты находятся на расстоянии, меньшем скорректированного порогового расстояния, процесс регенерации можно прекратить.
На ФИГ. 2 схематически представлен пример системы 200 автоматизированной парковки с задействованием ультразвукового датчика 185. Система 200 содержит компоненты типового транспортного средства, содержащего блок 208 управления силовым агрегатом, показанный в виде комбинированного блока управления, состоящего из контроллера 12 и блока 210 управления трансмиссией. Система 200 также содержит один или более ультразвуковых датчиков 185, установленных в разных местах на транспортном средстве и выполненных с возможностью выдачи входных параметров блоку 205 автоматизированной парковки. Например, ультразвуковые датчики могут быть расположены на передней, боковой, задней сторонах транспортного средства и/или в любой комбинации на указанных сторонах. Раскрытая в настоящем описании система 200 в целом подходит для различных типов транспортных средств, в том числе малых или больших автомобилей, грузовых автомобилей, автофургонов, внедорожников и т.п., выполненных с возможностью применения ультразвукового датчика.
Термин «силовой агрегат» обозначает систему выработки и подачи энергии, включающую в себя двигатель и трансмиссию и используемую в качестве системы привода в автомобильном транспортном средстве. Блок 208 управления силовым агрегатом осуществляет операции управления двигателем и трансмиссией с помощью контроллера 12 и блока 210 управления трансмиссией соответственно. Контроллер 12 определяет данные, относящиеся к различным частям двигателя, и может регулировать подачу топлива, момент зажигания, расход всасываемого воздуха и ряд иных известных операций двигателя, речь о которых шла выше на примере ФИГ. 1. Блок 210 управления трансмиссией определяет нагрузку двигателя и скорость транспортного средства для выбора положения шестерни, которое должно быть установлено в трансмиссии. Для целей описания, на ФИГ. 2 изображены только некоторые компоненты блока 210 управления силовым агрегатом. При этом специалистам в данной области техники будет понятно, что блок 208 управления силовым агрегатом может быть функционально связан с рядом датчиков, переключателей и других известных устройств для сбора информации о транспортном средстве и управления различными операциями транспортного средства.
Блок 205 автоматизированной парковки обеспечивает такие возможности, как автопарковка, параллельная парковка, выявление препятствий и т.д., результатом чего является удобный или полностью автоматизированный процесс парковки. Например, с помощью блока 205 автоматизированной парковки транспортное средство может само направить себя на парковочное место с небольшим количеством управляющих воздействий со стороны водителя или без них. В этом процессе блок обнаруживает объекты, создающие риск удара, и предупреждает об их наличии. Обнаружение и предупреждение осуществляют несколько датчиков, например, ультразвуковой датчик 185, взаимодействующие для определения расстояния между транспортным средством и окружающими объектами. При этом, как сказано выше и будет подробнее раскрыто ниже, влажность может представлять собой шум-фактор, являющийся одной из причин эксплуатации ультразвукового датчика в том или ином рабочем диапазоне. Соответственно, в некоторых примерах относительную влажность можно определять либо посредством самого ультразвукового датчика, либо с помощью других датчиков (например, УДКОГ) в транспортном средстве, что позволяет улучшить рабочий диапазон ультразвукового датчика. В некоторых примерах посредством одной или более камер, расположенных в одном или более местах на транспортном средстве, можно обнаруживать целевые объекты для выполнения вычисления влажности с помощью ультразвукового датчика (датчиков), как подробнее раскрыто ниже. В таком примере способ может предусматривать выбор одного из множества ультразвуковых датчиков, расположенных по периметру автотранспортного средства, частично на основе одного или более изображений от одной или более камер, расположенных по периметру автотранспортного средства. Выбранный датчик в некоторых примерах может быть выбран на основании того, что объект, выявленный одной из камер, расположен в пределах траектории передачи выбранного датчика. В некоторых примерах может быть определено, что объект является неподвижным относительно транспортного средства. Например, с помощью камер может быть определено, что объект является неподвижным. В еще одном примере выбранный датчик может быть выбран на основании того, что в пределах траектории передачи выбранного датчика движется объект - транспортное средство, причем объект - транспортное средство движется со скоростью, по существу равной скорости автотранспортного средства, а также находится на по существу постоянном расстоянии от автотранспортного средства. Кроме того, в некоторых примерах, дополнительно или взамен, одна или более камер могут функционировать для передачи изображений и результатов определения приблизительного расстояния (например, путем анализа для распознавания объектов) во время процесса частично или полностью автоматизированной парковки.
Ультразвуковой датчик 185 может обнаруживать препятствия слева и справа, спереди или сзади транспортного средства с возможностью использования данной информации блоками транспортного средства, например, блоком переключателей на рулевом колесе (не показан), тормозной системой (не показана), блоком (205) автоматизированной парковки и т.п.Таким образом, несмотря на то, что один или более ультразвуковых датчиков 185 показаны соединенными с блоком автоматизированной парковки, данное изображение имеет исключительно иллюстративные цели и не имеет ограничивающего характера. При этом, для краткости, возможные сферы применения одного или более ультразвуковых датчиков не будут подробно раскрыты в настоящем описании. При этом следует понимать, что возможны и другие сферы применения ультразвукового датчика (датчиков), помимо автоматизированной парковки, в соответствии с раскрытыми в настоящем описании способами без отступления от объема раскрываемого изобретения.
Один или более ультразвуковых датчиков 185 могут содержать передающие (посылающие) средства с возможностью передачи ультразвуковых волн и приемные средства с возможностью приема этих волн, отраженных от объекта вблизи транспортного средства, например, препятствия 220. Может быть определено время прохождения, представляющее собой время между передачей и приемом сигнала ультразвуковой волны, и определено расстояние между датчиком и препятствием (например) по формуле d=c*t/2, где с - скорость звука, a t - время прохождения. Затем информацию о расстоянии можно направить в блок 205 автоматизированной парковки (или иной соответствующий блок), например. Такие возможности ультразвуковых датчиков в части обнаружения объектов хорошо известны специалистам в данной области техники и не будут подробно описаны в настоящем раскрытии.
Как сказано выше, рабочий диапазон одного или более ультразвуковых датчиков 185 может зависеть от шум-факторов. Четырьмя основными шум-факторами, влияющими на ультразвуковые датчики, являются температура, влажность, угол поверхности цели и шероховатость отражающей поверхности. При этом, как будет подробнее раскрыто ниже, шум-фактор температуры можно компенсировать путем измерения температуры воздуха. Кроме того, можно компенсировать угол поверхности цели и шероховатость отражающей поверхности путем использования двух или более частот волн, направляемых из одного передающего средства, причем для определения результатов измерения расстояния используют только отраженные сигналы, имеющие одно и то же время прохождения с передачи до приема, как будет подробнее раскрыто ниже. При этом для транспортных без специального датчика влажности может быть трудно компенсировать влажность.
В связи с этим, ниже подробно раскрыты способы для определения и компенсации влажности посредством ультразвукового датчика (например, 185) на примерах ФИГ. 4-7, ФИГ. 9 и ФИГ. 11-12. Вкратце, влажность дифференцированно влияет на величину затухания (например, потерю интенсивности), наблюдаемую для разных частот звука. Поэтому передача сигналов с множеством частот от одного ультразвукового датчика и определение затухания для каждой отдельной частоты позволяет вычислить относительную влажность в зависимости от разности затухания между парами частот. При этом в некоторых примерах некоторые частоты могут лучше подходить для определения разностей затухания между парами частот. Поэтому некоторые примеры могут предусматривать изменение частот передаваемых сигналов, если будет установлено, что отраженные сигналы имеют или будут иметь нежелательное отношение (отношения) сигнал-шум.
Например, некоторые параметры окружающей среды (например, ветер, дождь, снег, туман, колебания температуры и т.п.) могут влиять на отношение сигнал-шум для определенных частот. Поэтому, если будет определено, что определенная частота имеет нежелательное отношение сигнал-шум, иными словами - затухание слишком велико, передачу и прием можно выполнять для одной или более дополнительных частот таким образом, чтобы можно было использовать только частоту (частоты) с желательными отношениями сигнал-шум для выполнения измерения относительной влажности.
Таким образом, изменение частоты (частот) передаваемых сигналов может включать в себя изменение частоты (частот) в зависимости от условий окружающей среды, в том числе температуры окружающей среды и/или влажности окружающей среды, а также от времени прохождения с момента передачи до момента приема переданных и отраженных сигналов.
В некоторых примерах предыдущий результат оценки влажности может служить опорным значением для изменения частоты (частот) для достижения желательных отношений сигнал-шум. Например, если будет выявлена вероятность высокой влажности, исходя из предыдущего результата оценки влажности, причем предыдущий результат оценки влажности может быть сохранен в памяти контроллера, одну или более частот можно исключить и выбрать другую частоту, причем выбранная частота может представлять собой частоту с вероятностью желательного отношения сигнал-шум переданного и принятого сигнала.
Аналогичным образом, в некоторых примерах частоту (частоты) можно изменять в зависимости от результата определения температуры окружающей среды. В дополнительных примерах частоту (частоты) можно изменять в зависимости от результата определения времени прохождения с момента передачи до момента приема переданных и отраженных сигналов. Например, если время прохождения с момента передачи до момента приема переданных и отраженных сигналов не лежит в ожидаемом диапазоне, может быть определено, что какой-либо параметр окружающей среды или иной параметр влияет на отношение сигнал-шум и/или целостность переданного и принятого сигнала, и можно изменить частоту с целью увеличения отношения сигнал-шум и/или целостности сигнала. В одном примере параметром, влияющим на время прохождения с момента передачи до момента приема переданных и отраженных сигналов, может быть загрязнение ультразвукового датчика. Всякий раз для определения того, нужна ли очистка датчика, такой пример может предусматривать сравнение амплитуды отраженного сигнала с опорной амплитудой, зависящей от расстояния до объекта, от которого отражен выбранный сигнал, при этом в число параметров окружающей среды входят, помимо прочих, влажность или температура. В примере, где может быть нужна очистка датчика, изменение частоты (частот) может устранить затруднение. В дополнительных примерах можно выбрать другой ультразвуковой датчик (вместо загрязненного), причем другой ультразвуковой датчик может быть выбран на основании наличия перекрытия траектории передачи ультразвукового датчика и целевого объекта, который будут использовать для выполнения оценки относительной влажности. Иначе говоря, в некоторых примерах выбор одного из множества датчиков, расположенных по периметру автотранспортного средства, может частично зависеть от того, нужна ли очистка какого-либо датчика из множества датчиков.
На ФИГ. 3А раскрыта диаграмма 300 зависимости затухания звука от процентной относительной влажности. А именно, процентная относительная влажность представлена на оси x, а затухание звука в дБ/км - на оси y. Линия 302 указывает ультразвуковую частоту 100 кГц, линия 304 указывает 80 кГц, линия 306 указывает 63 кГц, линия 308 указывает 50 кГц, линия 310 указывает 40 кГц, линия 312 указывает 31.5 кГц, линия 314 указывает 25 кГц, а линия 316 указывает 20 кГц. Из диаграммы видно, что затухание звука тем больше, чем выше частота ультразвуковой волны.
На ФИГ. 3В раскрыта диаграмма 340 зависимости затухания звука от процентной относительной влажности. Как и на ФИГ. 3А, линия 302 указывает ультразвуковую частоту 100 кГц, а линия 316 - ультразвуковую частоту 20 кГц. Стрелка 342 служит для указания разности затухания при сорокапроцентной относительной влажности между ультразвуковыми частотами 100 кГц и 20 кГц в иллюстративных целях.
Соответственно, на ФИГ. 3С раскрыта диаграмма 360 разности затухания 362 звука при 100 кГц и 20 кГц в диапазоне процентной относительной влажности, указанном на ФИГ. 3А-3В. А именно, разность затухания звука (дельта затухания звука) при 100 кГц и 20 кГц представлена на оси x, а процентная относительная влажность - на оси y. Построение графиков зависимости разности затухания при двух частотах от процентной относительной влажности позволяет использовать простую функцию преобразования, представленную стрелками 364, для определения относительной влажности. Иначе говоря, преобразование разности затухания может включать в себя применение функции преобразования для преобразования разности затухания в результат измерения относительной влажности. Например, двумерная (2D) табулированная зависимость может содержать известные или заранее заданные значения относительной влажности, соответствующие разностям затухания звука при разных частотах. Определив разность затухания звука при двух разных частотах, по такой табулированной зависимости можно определить относительную влажность. Несмотря на то, что разности затухания звука представлены для 100 кГц и 20 кГц, следует понимать, что эти частоты использованы для определения относительной влажности исключительно в иллюстративных целях, и то, что аналогичным образом можно применять разности затухания звука при двух частотах, соответствующие частотам, отличным от 100 кГц и 20 кГц.
На ФИГ. 4 раскрыта высокоуровневая блок-схема примера способа 400 для определения влажности посредством ультразвукового датчика. А именно, способ 400 может содержать шаги, на которых: передают множество сигналов от одного датчика, каждый на разной частоте, принимают отраженные сигналы переданных сигналов, и определяют значения затухания только для каждого из отраженных сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема. После определения значений затухания, способ 400 может дополнительно содержать шаги, на которых: определяют разности между парами значений затухания, и преобразуют разности в показатель относительной влажности.
Способ 400 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1 и ФИГ. 2, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 400 может быть реализован контроллером, например, контроллером 12 на ФИГ. 1, и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 400 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1. Контроллер может задействовать исполнительные устройства, например, ультразвуковой датчик (например, 185) и т.п., согласно нижеследующему способу.
Выполнение способа 400 начинают на шаге 405, при этом он может включать в себя определение параметров работы двигателя. Параметры работы можно оценивать, измерять и/или опосредованно определять, при этом в их число могут входить один или более из таких параметров, как: скорость транспортного средства, местоположение транспортного средства и т.п., ряд параметров двигателя, например, состояние двигателя, нагрузка двигателя, частота вращения двигателя, отношение В/Т и т.п., ряд параметров топливной системы, например, уровень топлива, тип топлива, температура топлива и т.п., ряд параметров системы улавливания топливных паров, например, загрязненность канистры улавливания топливных паров, давление в топливном баке и т.п.
Далее, на шаге 410, способ 400 может предусматривать измерение температуры воздуха окружающей среды. Как указано выше на примере ФИГ. 1, датчик (например, 127) температуры наружного воздуха (ТНВ), расположенный на наружной стороне системы (например, 101) транспортного средства, может служить для определения температуры воздуха окружающей среды. Например, контроллер (например, 12) может направить сигнал датчику ТНВ для снятия показания температуры воздуха окружающей среды. Затем показание может быть передано в контроллер и, например, сохранено в нем. Как будет подробнее раскрыто ниже, сведения о температуре воздуха окружающей среды можно учитывать при вычислении разности суммарного затухания при двух разных ультразвуковых частотах. Иначе говоря, преобразование расстояний между парами значений затухания в показатель относительной влажности может зависеть от результата измерения температуры воздуха окружающей среды.
Далее, на шаге 415, способ 400 может предусматривать выполнение алгоритма изменения частоты АИЧ (VFA), состоящего в передаче и приеме сигналов с множеством ультразвуковых частот, что позволяет вычислить разность (разности) затухания. Алгоритм (АИЧ) можно выполнять по способу 500 на ФИГ. 5.
Соответственно, на ФИГ. 5 раскрыта высокоуровневая блок-схема примера способа 500 для выполнения АИЧ. А именно, способ 500 может предусматривать направление ультразвуковому датчику команды передать ультразвуковую волну (сигнал с линейной частотной модуляцией) с первой частотой с последующим измерением и сохранением в памяти времени прохождения и интенсивности отраженной волны. Далее способ 500 может предусматривать направление ультразвуковому датчику команды передать еще один сигнал с линейной частотной модуляцией со второй частотой, и может также предусматривать последующее измерение и сохранение в памяти времени прохождения и интенсивного отраженного сигнала, соответствующих второму сигналу с линейной частотной модуляцией.
Способ 500 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1 и ФИГ. 2, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 500 может представлять собой подпроцесс способа 400, в связи с чем способ 500 может быть реализован контроллером (например, 12), и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 500 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1. Контроллер может задействовать исполнительные устройства, например, ультразвуковой датчик (например, 185) и т.п., согласно нижеследующему способу.
Выполнение способа 500 начинают на шаге 505, при этом способ может предусматривать передачу сигнала с линейной частотной модуляцией с первой частотой. А именно, контроллер может направить электронный сигнал в форме колеблющегося напряжения ультразвуковому датчику (например, 185), причем частота колеблющегося напряжения может соответствовать необходимой частоте возникающей в результате ультразвуковой волны. В некоторых примерах первая частота может представлять собой частоту, для которой можно ожидать наибольшую величину затухания, например, 100 кГц. При этом такой пример является иллюстративным и не носит ограничительного характера. Вместо указанной частоты, первую передачу можно осуществлять с любой частотой в диапазоне 20 кГц-100 кГц включительно.
Далее, на шаге 510, способ 500 может предусматривать измерение и сохранение в памяти времени прохождения (t1) и интенсивности (i1) отраженного сигнала, соответствующих переданному с первой частотой (f1) сигналу с линейной частотной модуляцией. Например, ультразвуковой датчик может быть выполнен с возможностью преобразования принятого отраженного сигнала (принятой звуковой волны) в колеблющееся напряжение, причем электрический потенциал колеблющегося напряжения может соответствовать интенсивности ультразвуковой волны. Спад интенсивности отраженной волны можно понимать как признак затухания ультразвуковой волны с момента передачи до момента приема.
После приема отраженного сигнала, соответствующего переданному с первой частотой сигналу с линейной частотной модуляцией, способ 500 может перейти на шаг 515. На шаге 515 способ 500 может предусматривать передачу сигнала с линейной частотной модуляцией со второй частотой (f2). Важно понимать, что отраженный сигнал сигнала первой частоты может быть принят ультразвуковым датчиком до того, как он направит второй сигнал с линейной частотной модуляцией. Второй сигнал с линейной частотной модуляцией может отличаться по частоте от первого сигнала с линейной частотной модуляцией, и может соответствовать частоте, большей или меньшей, чем частота первого сигнала с линейной частотной модуляцией. Например, если первая частота (f1) была 100 кГц, то вторая частота (f2) может быть 20 кГц. Такой пример является иллюстративным и не носит ограничительного характера.
Далее, на шаге 520, как и на шаге 510, способ 500 может предусматривать измерение и сохранение в памяти времени прохождения (t2) и интенсивности (i2) отраженного сигнала, соответствующего второму сигналу с линейной частотной модуляцией. Как сказано выше, время прохождения и интенсивность второго сигнала с линейной частотной модуляцией могут быть сохранены в памяти контроллера (например, 12).
Далее, на шаге 525, способ 500 может предусматривать определение того, нужна ли дополнительная точность (например, лучшее отношение сигнал-шум). Например, в связи с передачей и приемом первых двух ультразвуковых волн (сигналов с линейной частотной модуляцией), контроллер может определить, являются ли отношения сигнал-шум принятых ультразвуковых волн достаточными (превышают ли они заранее заданный пороговый уровень) для анализа. В некоторых примерах, в зависимости от контура и/или угла отражения объекта, отражающего переданные волны, один или более принятых сигналов могут быть ниже порога, необходимого для точного измерения затухания. В еще одном примере параметры окружающей среды (например, ветер, дождь и т.п.) могут стать причиной того, что принятые сигналы ниже заранее заданного порогового уровня. В еще одном примере в число параметров окружающей среды могут входить один или более из следующих: температура окружающей среды, влажность окружающей среды и время прохождения с момента передачи до момента приема переданных и отраженных сигналов. В дополнительных примерах, загрязнение ультразвукового датчика может стать причиной того, что принятые сигналы ниже заранее заданного порогового уровня.
В дополнительных примерах дополнительная точность может быть нужна в связи с предполагаемым использованием результата измерения влажности с помощью ультразвукового датчика. Например, если ранее результат оценки влажности определяли с помощью других средств (например, УДКОГ и т.п.), при этом ультразвуковой датчик используют в качестве контрольного для проверки того, что предыдущий результат измерения фактически продолжает быть корректным, строго точный результат измерения может не быть нужен. В таком примере, если отношение сигнал-шум принятых отраженных сигналов переданных с первой и второй частотами сигналов выше заранее заданного порога, то для определения результата оценки влажности можно использовать только две частоты. При этом возможны другие примеры, в которых могут быть нужны более точные результаты измерения относительной влажности. Такие примеры могут включать в себя следующие условия: истек некоторый период времени с предыдущего измерения влажности, определено, что барометрическое давление изменилось на величину больше пороговой, определено, что температура изменилась на величину больше пороговой, причем точное определение влажности нужно для эксплуатации двигателя или для автоматизированной парковки и т.п.
В любом из вышеуказанных или других, конкретно не указанных, примеров, где нужна дополнительная точность, способ 500 может перейти на шаг 530. На шаге 530 способ 500 может предусматривать направление ультразвуковому датчику команды передать один или более дополнительных сигналов с линейной частотной модуляцией (например, изменить частоты), каждый из которых можно измерить, как раскрыто выше, на предмет времени прохождения и интенсивности возвратного отраженного сигнала с помощью ультразвукового датчика. Например, можно передать сигналы с третьей, четвертой и пятой частотами и проверить каждый из них на время прохождения и интенсивности возвратного отраженного сигнала. Этот пример носит иллюстративный, а не ограничивающий характер. При этом следует понимать, что точность результата измерения влажности, как будет подробнее раскрыто ниже, может быть тем выше, чем больше количество частот передаваемых и принимаемых сигналов. Иначе говоря, можно изменять частоты передаваемых сигналов, если будет установлено, что отраженные сигналы имеют или будут иметь отношение сигнал-шум ниже заранее заданного порогового уровня, причем изменение частот передаваемых сигналов происходит до определения разности пар значений затухания и преобразования разностей в показатель относительной влажности, как будет подробнее раскрыто ниже.
Если на шаге 525 принятые сигналы с двумя или более частотами будут иметь отношение сигнал-шум, достаточное для необходимой точности результата измерения влажности (как раскрыто ниже), способ 500 может совершить возврат на шаг 420 на ФИГ. 4.
На шаге 420 на ФИГ. 4 способ 400 может предусматривать определение того, являются ли времена прохождения для каждой из частот эквивалентными. Например, если на шаге 415 были переданы и приняты сигналы с двумя частотами, можно определить, имеют ли сигналы с этими двумя частотами одно и то же время прохождения. Если на шаге 415 были переданы и приняты сигналы с тремя частотами, можно определить, имеют ли сигналы с этими тремя частотами одно и то же время прохождения и т.п. При вычислении разностей затухания для определения относительной влажности можно осуществлять дальнейшую обработку только сигналов с частотами, имеющих одни и те же времена прохождения, как будет подробнее раскрыто ниже. А именно, значения затухания можно определять только для тех из отраженных сигналов, которые имеют одно и то же время прохождения с момента передачи до момента приема, что позволяет сделать поправку на изменения угла поверхности цели и шероховатости отражающей поверхности, например.
Соответственно, если на шаге 420 будет определено, что времена прохождения для каждой из частот переданных и принятых на шаге 415 сигналов эквивалентны, способ 400 может перейти на шаг 425.
На шаге 425 способ 400 может предусматривать выполнение вычисления дельты затухания ВДЗ (DAC) по способу на ФИГ. 6.
На ФИГ. 6 раскрыт высокоуровневый пример способа 600 для выполнения ВДЗ. А именно, сигналы с частотами, переданные и принятые согласно алгоритму изменения частоты (АИЧ), раскрытому выше на примере ФИГ. 5, в отношении которых было определено, что они имеют одни и те же времена прохождения, как раскрыто выше на примере ФИГ. 4, могут быть обработаны для вычисления затухания сигнала каждой отдельной частоты, которое далее можно использовать для вычисления разностей затухания сигналов с разными частотами для определения относительной влажности.
Способ 600 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1 и ФИГ. 2, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 600 может представлять собой подпроцесс способа 400, при этом способ 600 может быть реализован контроллером (например, 12), и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 600 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1.
Выполнение способа 600 начинают на шаге 605, при этом он может предусматривать вычисление затухание (α) для каждой из частот с эквивалентными временами прохождения, как раскрыто в способе 400 на ФИГ. 4. А именно, вычисление затухания для первой частоты (f1) можно выполнить по следующей формуле

где S0 - исходная интенсивность незатухшего сигнала, z - расстояние, проходимое сигналом, S1 - интенсивность принятого затухшего сигнала, а α1 - коэффициент затухания для частоты f1.
Преобразовав Уравнение (1), получим

Коэффициент суммарного затухания (αTot) включает в себя затухания, обусловленные температурой, влажностью, углом поверхности цели и шероховатостью отражающей поверхности. При этом выполнение АИЧ по способу на ФИГ. 5 и последующее принятие мер к тому, чтобы для ВДЗ происходила обработка только сигналов с такими частотами, при которых времена прохождения являются одинаковыми, как раскрыто в способе на ФИГ. 4, факторы температуры, угла поверхности цели и шероховатости отражающей поверхности можно вычесть. А именно, поскольку температура известна, ее влияние можно нейтрализовать, а угол поверхности цели и шероховатость отражающей поверхности не меняются во время измерения разности интенсивности отраженных сигналов с разными частотами, при условии, что времена прохождения для всех анализируемых частот являются эквивалентными. Таким образом, из всех переменных, влияющих на коэффициент суммарного затухания (αTot), неизвестна только влажность, при этом коэффициент затухания может быть разным для разных частот.
Соответственно, после того, как будут вычислены все значения затухания для каждой из анализируемых частот на шаге 605, способ 600 может перейти на шаг 610. На шаге 610 способ 600 может предусматривать вычисление значений дельты (Δ) затухания для каждой из анализируемых частот. А именно, разность затухания из-за влажности между двумя частотами f1 и f2, например, может быть равна общей разности затухания между f1 и f2 по указанным выше причинам. Следовательно,

Из уравнения 3 видно, что представлены две частоты - f1 и f2. При этом следует понимать, что в примере, где возможно использование более двух частот для выполнения АИЧ на ФИГ. 5 и ВДЗ, раскрытого на примере ФИГ. 6, каждую из использованных частот можно вычесть из всех остальных частот для повышения точности измерения разности затухания. Например, в случае трех частот, представляющих собой частоты f1, f2 и f3, вычисление разности затухания может включать в себя (f1-f2), (f1-f3) и (f2-f3), причем разности могут представлять собой абсолютные значения соответствующих разностей. В примерах с более, чем тремя частотами, можно применять аналогичную методику.
Далее, на шаге 615, после того, как будет вычислена Δ затухания для каждой пары частот, способ 600 может предусматривать сохранение Δ значений затухания и соответствующих значений частот в таблице, причем таблица может быть сохранена в памяти контроллера (например, 12). Затем способ 600 может совершить возврат на шаг 425 способа 400.
Соответственно, на шаге 425 способа 400, после того, как будет выполнено ВДЗ по способу 600 на ФИГ. 6, способ 400 может перейти на шаг 430. На шаге 430 способ 400 может предусматривать определение относительной влажности по табулированной зависимости, сохраненной в памяти контроллера. Например, можно использовать простую функцию преобразования, позволяющую определить, для той или иной пары частот и Δ затухания для этой пары частот, относительную влажность путем соотнесения функции преобразования с табулированной зависимостью, сохраненной в памяти контроллера (см. ФИГ. 3С). В случае, где получено несколько Δ значений затухания для нескольких пар частот, по Δ значений затухания и соответствующей паре частот можно определить процентную относительную влажность, после чего контроллер может найти среднее значение всех значений относительной влажности для повышения достоверности при измерении относительной влажности.
Если на шаге 420 способа 400 будет определено, что не все времена прохождения для частот, применяемых на шаге 415, эквивалентны, способ 400 может перейти на шаг 435 и может предусматривать выборочное исключение неэквивалентных данных. Например, данные, соответствующие частотам с одинаковыми временами прохождения, могут быть сохранены в памяти контроллера (например, 12), а данные, относящиеся к частотам, не имеющим эквивалентных времен прохождения, могут быть исключены. Далее на шаге 440, можно определить, является ли набор оставшихся данных достаточным для определения влажности с необходимой точностью. Например, если было определено, что только две частоты имеют одинаковые времена прохождения, при этом нужна повышенная точность, причем повышенная точность может предусматривать вычисление относительной влажности из набора данных, содержащего более двух частот, способ 400 может перейти на шаг 445. Таким образом, если на шаге 440 будет определено, что набор оставшихся данных недостаточен для вычисления относительной влажности с необходимой точностью, способ 400 может перейти на шаг 445 и может предусматривать определение влажности иным путем при наличии условий для этого. В некоторых примерах определение влажности может быть выполнено с помощью датчика (датчиков) кислорода во всасываемом воздухе или отработавших газах, как будет раскрыто на примере ФИГ. 8-9. Или же, если на шаге 440 будет определено, что набор оставшихся данных достаточен для определения относительной влажности с необходимой точностью, способ 400 может перейти на шаг 425 и может предусматривать выполнение ВДЗ, как раскрыто выше.
В некоторых примерах транспортное средство может быть оборудовано множеством ультразвуковых датчиков. В подобном случае возможны ситуации, когда целесообразно в приоритетном порядке использовать конкретный датчик при выполнении измерения относительной влажности. Такие примеры могут включать в себя состояние, когда определено, что один или более датчиков загрязнены или не функционируют как нужно. В подобном случае может быть целесообразно использовать только тот ультразвуковой датчик (датчики), который функционирует как нужно. В еще одном примере может быть целесообразно выполнять обнаружение объекта каким-либо вспомогательным средством, а затем предпочтительно использовать ультразвуковой датчик, расположенный в оптимальном месте, для повышения вероятности успешного определения относительной влажности. В некоторых примерах обнаружение объекта каким-либо вспомогательным средством может включать в себя обнаружение объекта посредством одной или более бортовых камер (например, 186).
Например, одна или более камер могут быть физически соединены проводами с системой управления транспортного средства, содержащей контроллер (например, 12), и могут быть соединены с ней с возможностью связи. В еще одном примере одна или более камер могут быть дополнительно или взамен соединены с возможностью беспроводной связи с контроллером для передачи и приема данных. В число технологий проводной связи могут входить: технология универсальной последовательной шины УПШ (USB), технология IEEE 1394, оптическая технология, иная технология порта последовательного или параллельного ввода-вывода или иной подходящий проводной канал связи. Дополнительно или взамен, технология беспроводной связи с одной или более камерами может представлять собой Bluetooth, протокол IEEE 802.11, протокол IEEE 802.16, сигнал сотовой связи, протокол совместного беспроводного доступа - кабельного доступа ПСБД-КД (SWAP-CA), протокол беспроводной УПШ или любую другую подходящую беспроводную технологию. Контроллер выполнен с возможностью приема одного или более массивов данных от одной или более камер, например, массивов видеоданных, массивов данных изображений и т.п.
Одна или более камер могут представлять собой камеры, установленные на переднем или заднем бампере или в любом другом подходящем месте на передней или задней стороне транспортного средства. В некоторых примерах на передней и/или задней стороне может быть установлено более одной камеры. Например, две или более камер могут быть установлены на передней стороне транспортного средства, и две или более камер могут быть установлены на задней стороне транспортного средства. Аналогичным образом, одна или более обращенных вбок камер могут быть установлены в любом подходящем месте на транспортном средстве для формирования изображений объектов слева и/или справа от транспортного средства. В некоторых примерах захват изображений, относящихся к левой стороне транспортного средства, можно осуществлять посредством более, чем одной камеры, при этом захват изображений, относящихся к правой стороне транспортного средства, также можно осуществлять посредством более, чем одной камеры.
В некоторых примерах одна или более камер могут быть неподвижными, а в других примерах одна или более камер могут быть выполнены с возможностью перемещения или поворачивания относительно транспортного средства. Кроме того, некоторые примеры могут содержать одну или более неподвижных камер и одну или более подвижных камер. Положение одной или более камер на транспортном средстве в некоторых примерах может обеспечивать возможности обзора на 360°. Как сказано выше, одна или более камер могут представлять собой камеры для захвата видео и/или изображений. В других примерах одна или более камер могут представлять собой инфракрасные камеры. Некоторые варианты осуществления могут содержать множество камер, некоторые из которых выполнены с возможностью захвата изображений и/или видео, при этом одна или более других камер могут быть выполнены с возможностью захвата инфракрасных изображений.
В некоторых примерах одна или более камер могут быть выполнены с возможностью обнаружения объектов поблизости от транспортного средства. Например, системы обнаружения объектов (часто именуемые «системы обнаружения препятствий»), функционирующие за счет применения одной или более камер транспортного средства, широко известны из уровня техники. А именно, широко известны системы безопасности транспортного средства, позволяющие обнаруживать препятствия, например, пешеходов, велосипеды, дорожные заграждения, другие автомобили и т.п. Углубленное рассмотрение всех возможных вариантов распознавания объектов посредством одной или более камер не входит в объем настоящего раскрытия. При этом следует понимать, что можно использовать любой известный из уровня техники способ для распознавания объектов посредством одной или более камер, как будет подробнее раскрыто ниже. В качестве иллюстративного примера, один способ распознавания объектов может включать в себя такие методики выделения контуров, как детектор границ Кэнни, для обнаружения краев кадра изображения, полученного одной или более камерами. Затем может быть сформировано контурное изображение, соответствующее кадру изображения. Кроме того, может быть сформировано бинарное изображение, соответствующее контурному изображению. Затем на бинарном изображении можно выявить одно или более «пятен», соответствующих одному или более объектам. По результатам анализа пятен на бинарном изображении можно определить такие характеристики, как форма, относительный размер, относительное расстояние и т.п., каждого из пятен, соответствующих объектам. Как сказано выше, этот пример носит иллюстративный и ни в коей мере не ограничивающий характер. Можно применять и другие известные из уровня техники способы и системы для обнаружения объектов посредством одной или более камер без отступления от объема раскрываемого изобретения.
В некоторых примерах обнаружение объектов посредством одной или более камер можно осуществлять, когда транспортное средство неподвижно. В других примерах обнаружение объектов посредством одной или более камер можно осуществлять во время движения транспортного средства. В любом из примеров то, что выявленные объекты являются неподвижными относительно транспортного средства, может быть определено на основании отсутствия изменений положения, размера или формы в течение определенного периода времени. Например, возможен захват нескольких изображений от одной или более камер за заранее заданный период времени, и, при отсутствии изменений положения, размера и формы какого-либо выявленного объекта за этот заранее заданный период, может быть определено, что выявленный объект является неподвижным относительно транспортного средства. В одном примере объект, могущий быть неподвижными относительно транспортного средства, может представлять собой другое транспортное средство, движущееся перед транспортным средством либо слева, справа или позади от него, при этом скорость и направление движения обоих транспортных средств по существу одинаковы. Как будет раскрыто ниже, неподвижные относительно транспортного средства объекты можно выявлять для выбора из множества ультразвуковых датчиков, расположенных на транспортном средстве, для выполнения измерений относительной влажности с повышенной вероятностью получения точных результатов измерения.
На ФИГ. 7 раскрыт высокоуровневый пример способа для обнаружения объектов с помощью одной или более имеющихся камер, расположенных на транспортном средстве, для выбора ультразвукового датчика для выполнения измерения относительной влажности. А именно, одна или более камер могут быть выполнены с возможностью поиска в среде, окружающей транспортное средство (например, вблизи него), на предмет объектов, неподвижных относительно транспортного средства. В случае выявления подходящего объекта, можно выбрать ультразвуковой датчик из множества ультразвуковых датчиков, расположенных на транспортном средстве, для выполнения измерения относительной влажности. Это позволяет выполнять измерение относительной влажности с повышенной вероятностью получения точного результата измерения относительной влажности и без необоснованного применения ультразвуковых датчиков в условиях, когда точное измерение относительной влажности маловероятно. Получение точных результатов измерения относительной влажности позволяет повысить эффективность управления в некоторых режимах работы транспортного средства, например, управление средствами частично или полностью автоматизированной парковки, регулирование величины рециркуляции отработавших газов, величины запаздывания зажигания и т.п.
Способ 700 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1 и ФИГ. 2, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 700 может быть реализован контроллером (например, 12), и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 700 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1. Контроллер может задействовать исполнительные устройства, например, ультразвуковой датчик (например, 185), одну или более бортовых камер (например, 186) и т.п., согласно нижеследующему способу.
Выполнение способа 700 начинают на шаге 705, при этом способ может предусматривать поиск в среде, окружающей транспортное средство, посредством имеющихся на транспортном средстве камер для обнаружения объектов, подходящих для выполнения измерения относительной влажности. В некоторых примерах поиск в указанной среде посредством имеющихся камер можно начать в связи с наступлением одного или более условий для запуска необходимого измерения влажности. Например, в число условий для запуска измерения влажности может входить выявленное изменение температуры окружающей среды выше порога температуры окружающей среды с предыдущего (например, последнего по времени) измерения влажности. Еще одним примером может служить изменение давления окружающей среды, превышающее порог давления окружающей среды, с предыдущего (например, последнего по времени) измерения влажности. В число других примеров может входить изменение метеоусловий, выявленное на основании включения стеклоочистителей ветрового стекла (не показаны), например. А именно, при включении стеклоочистителей ветрового стекла транспортного средства, в контроллер может быть направлен сигнал, запрашивающий измерение относительной влажности, могущее включать в себя сначала направление контроллером команды одной или более камерам выполнить сканирование окружающей среды на предмет подходящих объектов.
В дополнительных примерах поиск в окружающей среде с помощью имеющихся камер можно начать в связи с истечением порогового времени работы двигателя или превышением заранее заданного расстояния пробега транспортного средства с предыдущего (например, последнего по времени) измерения влажности.
Как сказано выше, в некоторых примерах транспортное средство может быть оборудовано бортовой навигационной системой (ГСОМ) (например, 34), содержащей один или более локационных датчиков для содействия в оценке скорости транспортного средства, высоты транспортного средства над уровнем моря, положения/местоположения транспортного средства и т.п. По таким данным можно опосредованно определять, например, местное барометрическое давление, причем изменение местного барометрического давления на величину больше пороговой с предыдущего измерения влажности может стать основанием для запроса нового измерения влажности, причем подходящие объекты можно определять посредством бортовой камеры (камер). В дополнительных примерах, контроллер (например, 12) может быть выполнен с возможностью получения данных по сети интернет или иной сети передачи данных. Данные, полученные от ГСОМ можно, в некоторых примерах, перекрестно сопоставлять с данными, имеющимися в интернете, для определения местных метеоусловий и т.п. В некоторых примерах, изменение метеоусловий согласно данным, полученным из ГСОМ и перекрестно сопоставленным с данными в интернете, может стать основанием для запроса измерения относительной влажности, причем с помощью имеющейся камеры (камер) можно выполнить сканирование окружающей среды на предмет подходящих объектов для выполнения измерения относительной влажности.
В дополнительных примерах, транспортное средство может работать в условиях, когда одна или более имеющихся камер находятся в действии (например, во время частично или полностью автоматизированных парковочных маневров), причем можно ситуативно выполнить определение относительной влажности. Например, если транспортное средство выполняет парковочный маневр, причем парковочный маневр предусматривает использование одной или более бортовых камер, то, если камера (камеры) обнаружит подходящий объект для выполнения измерения относительной влажности, может быть выполнено измерение относительной влажности, как подробнее раскрыто ниже.
Соответственно, при наличии условий для поиска в среде вблизи транспортного средства подходящих объектов для выполнения измерения относительной влажности, на шаге 705 способа 700 можно задействовать одну или более камер для поиска подходящих объектов. А именно, контроллер может направить команду (например, проводной или радиосигнал) одной или более камерам получить одно или более изображений среды вокруг транспортного средства. Изображения, полученные одной или более камерами, могут быть сохранены в памяти контроллера, например - для дальнейшей обработки, как подробнее раскрыто ниже. В некоторых примерах, где одна или более камер выполнены с возможностью поворачивания (например, перемещения, и не являются неподвижными), контроллер может быть выполнен с возможностью захвата изображений при разных углах зрения камеры для тщательного обследования среды, окружающей транспортное средство, на предмет подходящих объектов.
В контексте настоящего описания, в число подходящих объектов для выполнения измерения относительной влажности могут, помимо прочих, входить объекты больше заранее заданного порогового размера, объекты заранее заданной формы, объекты, определенные как неподвижные относительно транспортного средства, объекты с выявленным отсутствием шероховатости поверхности (например, с гладкой поверхностью), объекты с предпочтительным углом ориентации и т.п. В число подходящих также могут входить объекты с вероятностью отражения ультразвукового сигнала обратно к ультразвуковому датчику таким образом, чтобы время прохождения с момента передачи до момента приема сигнала могло быть одинаковым для множества отдельных ультразвуковых частот.
Соответственно, в связи с запросом поиска в окружающей среде подходящих объектов для выполнения измерения относительной влажности и в связи с получением изображений посредством одной или более камер на шаге 705, способ 700 может перейти на шаг 710.
На шаге 710 способ 700 может предусматривать определение того, обнаружены ли подходящие объекты одной или более камерами. Как сказано выше, контроллер, используя любые известные из уровня техники средства, может выполнять анализ для распознавания объектов на изображениях, полученных от одной или более камер, для определения того, обнаружены ли объекты, подходящие для измерения относительной влажности. В некоторых примерах, если для поиска в окружающей среде подходящих объектов используют несколько камер, контроллер может обработать изображения от всех камер, а затем выявить наилучшим образом или наиболее подходящий объект для выполнения измерения относительной влажности. Например, в примере с использованием двух камер для поиска в окружающей среде, причем обе камеры обнаруживают подходящий объект, можно дополнительно определить, какой из объектов наиболее подходит для выполнения проверки относительной влажности. Неограничивающим примером одного из объектов, более подходящего, чем другой, может служить объект с большим, чем у другого размером, объект с меньшей, чем у другого, шероховатостью поверхности, объект, в большей степени неподвижный относительно транспортного средства, чем другой объект и т.п.
Соответственно, если на шаге 710 одной или более камерами будут обнаружены один или более объектов, подходящих для выполнения оценки относительной влажности, способ 700 может перейти на шаг 715. На шаге 715 способ 700 может предусматривать определение положения подходящих объектов относительно транспортного средства. Например, определение положения подходящих объектов относительно транспортного средства может включать в себя определение направления, в котором была обращена камера во время получения изображения подходящего объекта, и определение местоположения объекта в зависимости от направления, в котором была обращена камера. В некоторых примерах один или более датчиков камер (например, 187) могут быть выполнены с возможностью направления сигналов контроллеру с указанием положения одной или более камер. Контроллер может быть выполнен с возможностью обработки данных о положении камеры, и по результату определения положения камеры можно определить положение выявленного подходящего объекта относительно транспортного средства.
Далее, на шаге 720, способ 700 может предусматривать определение того, оборудовано ли транспортное средство ультразвуковым датчиком, расположенным с возможностью обнаружения выявленного подходящего объекта для выполнения измерения относительной влажности. Например, если транспортное средство оборудовано множеством ультразвуковых датчиков, положение и местоположение одного или более ультразвуковых датчиков может не быть оптимальным для определения относительной влажности с учетом положения выявленного подходящего объекта. Соответственно, ультразвуковые датчики, не расположенные оптимально, можно не задействовать в выполнении измерения относительной влажности. Иными словами, на шаге 720 можно определить, какой из множества ультразвуковых датчиков транспортного средства расположен оптимально для выполнения измерения относительной влажности в зависимости от положения выявленного подходящего объекта. Если на шаге 720 будет установлено, что ни один из имеющихся ультразвуковых датчиков не расположен оптимально для выполнения измерения относительной влажности в зависимости от положения выявленного подходящего объекта относительно транспортного средства, способ 700 может совершить возврат на шаг 705 и может предусматривать продолжение поиска в среде, окружающей транспортное средство, на предмет подходящих объектов. В таком примере выявленный подходящий объект, для которого отсутствует ультразвуковой датчик, можно исключить из дальнейшего анализа с тем, чтобы можно было определять только другие подходящие объекты для выявления подходящего объекта, для которого ультразвуковой датчик расположен оптимально для выполнения измерения относительной влажности.
В некоторых примерах, на шаге 720 можно также определить, функционирует ли выявленный оптимальный ультразвуковой датчик как нужно. Например, если будет выявлено, что ультразвуковой датчик оптимален для обнаружения конкретного выявленного подходящего объекта, но этот ультразвуковой датчик не функционирует как нужно, способ 720 также может совершить возврат на шаг 705, и может предусматривать продолжение поиска подходящих объектов посредством имеющихся на транспортном средстве камер. В некоторых примерах может быть определено, что конкретный ультразвуковой датчик не функционирует как нужно, если он загрязнен. Загрязнение ультразвукового датчика можно определить, например, на основании амплитуды или расстояния отраженного сигнала. Например, если расстояние, пройденное переданным сигналом до того, как он будет отражен и принят датчиком, меньше ожидаемого, можно определить, что имеет место загрязнение ультразвукового датчика. Другим примером того, что ультразвуковой датчик не функционирует как нужно, может служить нарушение какой-либо функции ультразвукового датчика. В число иллюстративных примеров могут входить неисправная проводка, ухудшение характеристик компонентов ультразвукового датчика и т.п. Соответственно, если на шаге 720 будет определено, что оптимальный ультразвуковой датчик для обнаружения конкретного подходящего объекта не функционирует как нужно, можно продолжить использование камер для выявления подходящего объекта для выполнения проверки относительной влажности, для которого на транспортном средстве есть оптимальный датчик влажности, причем оптимальный датчик влажности функционирует как нужно. В некоторых из раскрытых выше примеров, на шаге 710 может быть определено более одного подходящего объекта. В таком примере, если будет определено, что конкретный ультразвуковой датчик не функционирует как нужно, также можно определить, можно ли использовать другой ультразвуковой датчик для выполнения измерения относительной влажности на другом (например, одном или более) подходящем объекте (объектах). В таком примере, если будет определено, что другой ультразвуковой датчик расположен оптимально для выполнения измерения относительной влажности на другом выявленном подходящем объекте, а также то, что этот ультразвуковой датчик функционирует как нужно, контроллер может принять решение задействовать ультразвуковой датчик, функционирующий как нужно, для обнаружения указанного подходящего объекта.
Соответственно, на шаге 720, если будет определено, что конкретный ультразвуковой датчик транспортного средства оптимален для выполнения измерения относительной влажности с учетом положения выявленного подходящего объекта, причем подходящий объект выявляют посредством одной или более бортовых камер, способ 700 может перейти на шаг 725. На шаге 725 способ 700 может предусматривать выполнение измерения относительной влажности, как раскрыто выше на примере способов на ФИГ. 4-6. Затем выполнение способа 700 можно завершить.
Как сказано выше, некоторые условия могут быть основанием для измерения влажности. Кроме того, в некоторых примерах может быть предпочтительно выполнить измерение влажности с помощью ультразвукового датчика, а в других примерах может быть предпочтительно выполнить измерение влажности, применив другое решение, например - универсальный датчик кислорода в отработавших газах (УДКОГ). Такой пример может включать в себя условия, когда транспортное средство находится в действии, при этом ни одна из бортовых камер не определяет какие-либо объекты, неподвижные относительно транспортного средства (например, ни одно другое транспортное средство не движется с по существу такой же скоростью и в по существу том же направлении). В еще одном примере могут иметь место оптимальные условия для измерения влажности посредством УДКОГ, например, событие отсечки топлива в режиме замедления ОТРЗ (DFSO). В таком примере может быть предпочтительно оценить относительную влажность посредством УДКОГ, как будет подробнее раскрыто ниже. Возможность измерений влажности в зависимости от параметров работы транспортного средства позволяет получить достоверные результаты измерения влажности в моменты, когда нужно получить результаты измерения влажности.
На ФИГ. 8 схематически изображен пример осуществления датчика кислорода в отработавших газах, например, УДКОГ 800, выполненного с возможностью измерения концентрации кислорода (O2) в потоке отработавших газов в режимах с подачей топлива. В одном примере УДКОГ 800 является одним из вариантов осуществления УДКОГ 126 на ФИГ. 1. При этом следует понимать, что в другом варианте датчик на ФИГ. 8 может представлять собой датчик кислорода во всасываемых газах, например, датчик 172 на ФИГ. 1. Датчик кислорода в отработавших газах также выполнен с возможностью оценки влажности окружающей среды в режимах без подачи топлива. Режимы без подачи топлива могут представлять собой режимы работы двигателя, в которых подача топлива прервана, но двигатель продолжает вращаться, и работают по меньшей мере один впускной клапан и один выпускной клапан, например, событие отсечки топлива в режиме замедления (ОТРЗ). Таким образом, воздух может течь через один или более цилиндров, при этом топливо в эти цилиндры не впрыскивают. В режимах без подачи топлива сжигание не осуществляют, и воздух окружающей среды может течь через цилиндр из заборного канала в выпускной канал. Таким образом, в датчик, например, датчик кислорода в отработавших газах, может поступать воздух окружающей среды с возможностью оценки влажности окружающей среды. В дополнительных примерах, в подходящих условиях влажность окружающей среды можно оценивать с помощью кислородного датчика, расположенного в воздухозаборном канале (например, кислородного датчика 172 на ФИГ. 1), и/или специального датчика влажности.
Датчик 800 содержит множество слоев одного или более керамических материалов, расположенных друг над другом. В варианте на ФИГ. 8 показаны пять керамических слоев в виде слоев 801, 802, 803, 804 и 805. Эти слои включают в себя один или более слоев твердого электролита с кислородно-ионной проводимостью. Неограничивающими примерами подходящих твердых электролитов являются материалы на основе оксида циркония. Кроме того, некоторые варианты, например, представленный на ФИГ. 8, могут содержать нагреватель 807 с возможностью теплового контакта с указанными слоями для увеличения их ионной проводимости. Несмотря на то, что изображенный УДКОГ 800 сформирован из пяти керамических слоев, следует понимать, что УДКОГ может содержать любое подходящее количество керамических слоев.
Слой 802 содержит материал или материалы, создающие диффузионный путь 810. По диффузионному пути 810 отработавшие газы могут проникать в первую внутреннюю полость 822 за счет диффузии. Диффузионный путь 810 может быть выполнен с возможностью пропускать один или более компонентов отработавших газов, включая, помимо прочих, необходимый анализируемый компонент (например, O2), для диффузии во внутреннюю полость 822 с интенсивностью, ограниченной по сравнению с той, с которой анализируемый компонент могут накачивать внутрь или выкачивать наружу пара электродов 812 и 814 накачки. Таким образом, в первой внутренней полости 822 можно получить стехиометрическое содержание O2.
Датчик 800 также содержит вторую внутреннюю полость 824 в пределах слоя 804, отделенную от первой внутренней полости 822 слоем 803. Вторая внутренняя полость 824 выполнена с возможностью поддержания постоянного парциального давления кислорода, соответствующего стехиометрическому составу смеси, например, содержание кислорода во второй внутренней полости 824 равно тому, которое присутствовало бы в отработавших газах, если бы воздушно-топливное отношение было стехиометрическим. Концентрацию кислорода во второй внутренней полости 824 поддерживают постоянной с помощью тока накачки Icp. Поэтому вторую внутреннюю полость 824 можно рассматривать как эталонный элемент.
Пара измерительных электродов 816 и 818 расположена с возможностью связи с первой внутренней полостью 822 и эталонным элементом 824. Пара измерительных электродов 816 и 818 обнаруживает градиент концентрации, могущий образоваться между первой внутренней полостью 822 и эталонным элементом 824 из-за того, что концентрация кислорода в отработавших газах превышает стехиометрический уровень или находится ниже его.
Пара электродов 812 и 814 накачки расположена с возможностью связи с внутренней полостью 822 и выполнена с возможностью электрохимического выкачивания выбранного компонента газа (например, O2) из внутренней полости 822 через слой 801 за пределы датчика 800. Или же пара электродов 812 и 814 накачки может быть выполнена с возможностью электрохимического накачивания выбранного газа через слой 801 во внутреннюю полость 822. В этом случае пара электродов накачки 812 и 814 может рассматриваться как элемент накачки O2. Электроды 812, 814, 816 и 818 могут быть выполнены из различных подходящих материалов. В некоторых вариантах осуществления электроды 812, 814, 816 и 818 могут быть выполнены по меньшей мере частично из материала, катализирующего диссоциацию молекулярного кислорода. Неограничивающими примерами таких материалов могут служить электроды, содержащие платину и/или золото.
Процесс электрохимической накачки кислорода из внутренней полости 822 или в нее включает в себя подачу электрического тока Ip на пару электродов 812 и 814 накачки. Ток накачки Ip, поданный на элемент накачки O2, накачивает кислород в первую внутреннюю полость 822 или из нее для поддержания стехиометрического содержания кислорода в полости. Ток накачки Ip пропорционален концентрации кислорода в отработавших газах. Таким образом, если смесь является бедной, то будет происходить выкачивание кислорода из внутренней полости 822, а если смесь является богатой - накачивание кислорода во внутреннюю полость 822.
Система управления (не показана на ФИГ. 8) генерирует сигнал напряжения накачки Vp в зависимости от величины подаваемого тока накачки Ip, необходимой для поддержания стехиометрического уровня в первой внутренней полости 822.
Следует понимать, что раскрываемый в настоящем описании кислородный датчик является не более чем примером осуществления УДКОГ (или датчика кислорода во впускном коллекторе), а также то, что другие варианты осуществления датчиков кислорода во всасываемом воздухе или в отработавших газах могут иметь дополнительные и/или другие признаки и/или конструктивные исполнения. Как вкратце раскрыто выше и будет более подробно раскрыто ниже, в некоторых условиях может быть предпочтительно получать результаты измерения влажности с помощью УДКОГ или датчика впускного коллектора, а в других условиях может быть предпочтительно получать результаты измерения влажности с помощью ультразвукового датчика.
На ФИГ. 9 раскрыт высокоуровневый пример способа 900 для выполнения ситуативного измерения влажности. А именно, при наличии условий для процесса определения влажности, можно выполнить определение влажности посредством либо кислородного датчика, либо ультразвукового датчика. Способ 900 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1-2 и ФИГ. 8, а также на примерах способов, раскрытых в настоящем описании и на ФИГ. 4-7, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 900 может быть реализован контроллером, например, контроллером 12 на ФИГ. 1, и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 900 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1 и ФИГ. 8. Контроллер может задействовать исполнительные устройства топливной системы, например, ультразвуковой датчик (датчики) (например, 185), камеру (камеры) (например, 186), кислородный датчик (датчики) (например, 126) и т.п., согласно нижеследующему способу.
Выполнение способа 900 начинают на шаге 902, который может предусматривать оценку и/или измерение текущих параметров работы транспортного средства. В число оцениваемых параметров могут входить, например, нагрузка двигателя, частота вращения двигателя, скорость транспортного средства, разрежение в коллекторе, положение дросселя, момент зажигания, поток РОГ, давление отработавших газов, воздушно-топливное отношение отработавших газов, частично или полностью автоматизированные парковочные операции и т.п.
Далее, на шаге 905, способ 900 может предусматривать определение того, соблюдены ли условия для выполнения процесса определения влажности. Как сказано выше, в число условий для запуска измерения влажности могут входить: изменение температуры окружающей среды, превышающее порог температуры окружающей среды, и/или изменение давления окружающей среды, превышающее порог давления окружающей среды, причем изменение температуры и/или давления происходит относительно предыдущего (например, последнего по времени или непосредственно предшествующего) измерения влажности. Например, температуру окружающей среды можно непосредственно оценивать как температуру наружного воздуха (ТНВ) с помощью датчика ТНВ, расположенного на наружной стороне транспортного средства. В еще одном примере температуру окружающей среды можно вывести из температуры заряда воздуха ТЗВ (ACT) или температуры всасываемого воздуха (ТВВ), измеряемой датчиком ТВВ, соединенным с заборным каналом двигателя. Давление окружающей среды можно оценивать по выходному сигналу датчика барометрического давления БД (BP), соединенного с заборным каналом. В некоторых примерах, вместо абсолютного изменения температуры или разности давлений можно определять, изменилась ли температура или давление на величину в процентах (%), превышающую пороговое изменение в процентах, причем пороговое изменение в процентах можно корректировать в зависимости от абсолютной температуры или давления окружающей среды.
В еще одном примере наличие условий для определения влажности может также включать в себя превышение порога времени работы двигателя или порогового расстояния пробега транспортного средства с последнего по времени измерения влажности
В число других примеров соблюдения условий для определения влажности могут входить: включение стеклоочистителей ветрового стекла, изменение метеоусловий согласно данным, полученным из ГСОМ и перекрестно сопоставленным с данными из интернета, или любой другой признак возможного изменения влажности окружающей среды с последнего по времени измерения влажности
Если на шаге 905 будет определено, что условия для определения влажности отсутствуют, способ 900 может перейти на шаг 910. На шаге 910 способ 900 может предусматривать продолжение регулирования параметров работы транспортного средства в зависимости от результата последнего по времени измерения влажности. Например, результат последнего по времени измерения влажности может представлять собой результат измерения влажности, выполненного посредством датчика кислорода в отработавших газах или ультразвукового датчика. При этом, если на шаге 905 будет определено, что условия для определения влажности соблюдены, способ 900 может перейти на шаг 915. На шаге 915 способ 900 может предусматривать определение того, соблюдены ли условия для определения влажности посредством датчиков кислорода во всасываемом воздухе или отработавших газах.
Наличие условий для определения влажности посредством датчика кислорода в отработавших газах (например, УДКОГ) может включать в себя режим без подачи топлива в двигатель, например, событие отсечки топлива в режиме замедления (ОТРЗ), в котором оценка влажности окружающей среды может включать в себя попеременную подачу первого и второго напряжений на датчик отработавших газов и формирование результата определения влажности окружающей среды по выходным сигналам датчика при первом и втором напряжениях, как раскрыто выше на примере ФИГ. 8. Или же наличие условий для определения влажности посредством датчика кислорода во всасываемом воздухе может включать в себя условия, в которых наддув, рециркуляция отработавших газов (РОГ), продувка канистры и вентиляция картера выключены, причем подача первого и второго напряжений на датчик кислорода во всасываемом воздухе позволяет определить влажность окружающей среды по выходному сигналу датчика при первом и втором напряжениях, как раскрыто выше на примере ФИГ. 8.
Если на шаге 915 будет определено, что условия для оценки влажности посредством датчика (датчиков) кислорода во всасываемом воздухе или отработавших газах соблюдены, способ 900 может перейти на шаг 920. На шаге 920 способ 900 может предусматривать определение влажности посредством датчика кислорода во всасываемом воздухе или в отработавших газах.
В случае применения УДКОГ в выпускном канале для измерения влажности, до начала измерения влажности может быть целесообразно выждать в течение некоторого заданного периода после отсечки топлива до тех пор, пока выпускная система по существу перестанет содержать углеводороды от сгорания в двигателе. Например, остаточные газы одного или более предшествующих циклов сгорания могут присутствовать в выпускной системе в течение нескольких циклов после отсечки топлива, при этом газ, выходящий из камеры, может содержать не только воздух окружающей среды в течение некоторого периода после прекращения впрыска топлива. В некоторых примерах период после отсечки топлива может представлять собой время после отсечки топлива. В других примерах период после отсечки топлива может представлять собой некое количество рабочих циклов двигателя после отсечки топлива.
Для измерения влажности воздуха, датчик (датчик всасываемого воздуха или датчик отработавших газов) изменяет опорное напряжение на элементе накачки, попеременно подавая первое напряжение и второе напряжение. Сначала может быть подано первое (более низкое) напряжение накачки. Неограничивающим примером первого напряжения может служить 450 мВ. Ток накачки при 450 мВ, например, может отражать количество кислорода в канале. При данном напряжении может не происходить распад молекул воды, в связи с чем они не вносят свой вклад в общее содержание кислорода в системе. Затем может быть подано второе (более высокое) напряжение накачки. Неограничивающим примером второго напряжения может служить 950 мВ. При этом более высоком напряжении может происходить диссоциация молекул воды. Второе напряжение выше первого, причем при втором напряжении происходит диссоциация молекул воды, а при первом напряжении - нет, причем выходные сигналы датчика представляют собой первый ток накачки, возникающий в связи с подачей первого напряжения, и второй ток накачки, возникающий в связи с подачей второго напряжения. После диссоциации молекул воды под действием второго напряжения, возрастает общая концентрация кислорода. Ток накачки отражает количество кислорода в канале плюс дополнительное количество кислорода из диссоциированных молекул воды. Например, первое напряжение может представлять собой напряжение, при котором можно определять концентрацию кислорода, а второе напряжение может представлять собой напряжение, при котором может происходить диссоциация молекул воды, что позволяет оценить влажность.
Соответственно, далее можно определить изменение тока накачки при изменении напряжения. Результат определения влажности окружающей среды может быть сформирован, исходя из разности первого и второго токов накачки, возникших при подаче первого и второго напряжений соответственно. Можно определить разность (дельту) тока накачки при первом опорном напряжении и тока накачки при втором опорном напряжении. Может быть найдено среднее значение дельты тока накачки за период наличия ОТРЗ (или иного условия, речь о которых шла выше) для определения влажности окружающей среды. Определив среднее значение изменения тока накачки, можно определить результат оценки влажности окружающей среды.
После оценки влажности окружающей среды на шаге 920, способ 900 может перейти на шаг 925. На шаге 925 способ 900 может предусматривать регулирование параметров работы транспортного средства в зависимости от последнего результата измерения влажности. В качестве неограничивающих примеров, регулирование параметров работы транспортного средства может включать в себя регулирование величины рециркуляции отработавших газов, и/или величины опережения или запаздывания зажигания, значения зажигания на границе и результата оценки октанового числа топлива. Например, возрастание концентрации воды в воздухе, окружающем транспортное средство, может привести к разбавлению смеси заряда, поступающего в камеру сгорания двигателя. Если один или более рабочих параметров не будут отрегулированы в связи с возрастанием влажности, возможно ухудшение эксплуатационных показателей двигателя и топливной экономичности, а также могут возрасти выбросы; таким образом, возможно снижение КПД двигателя в целом. В некоторых вариантах осуществления можно отрегулировать только один параметр в зависимости от влажности. В других вариантах можно отрегулировать эти рабочие параметры в любой комбинации или подкомбинации в зависимости от результатов измерения колебаний влажности окружающей среды.
В одном примере осуществления можно отрегулировать величину РОГ в зависимости от результата измерения влажности. Например, возрастание влажности может обнаружить датчик кислорода в отработавших газах в режимах без подачи топлива в двигатель (или в других примерах - ультразвуковой датчик, как будет раскрыто ниже). В связи с возрастанием влажности, во время последующей работы двигателя с подачей топлива, поток РОГ в по меньшей мере одну камеру сгорания можно уменьшить. В результате можно сохранить КПД двигателя без ухудшения показателей по выбросам оксидов азота. А именно, транспортное средство можно приводить в движение по меньшей мере частично посредством двигателя, содержащего впускной коллектор и выпускной коллектор, причем двигатель работает за счет сгорания подаваемого в двигатель топлива, причем количество отработавших газов рециркуляции, подаваемых во впускной коллектор двигателя, регулируют во время работы двигателя, причем параметры работы транспортного средства можно регулировать в зависимости от результата определения относительной влажности, причем регулирование параметров работы транспортного средства включает в себя регулирование по меньшей мере величины рециркуляции отработавших газов, подаваемых в двигатель, или величины запаздывания или опережения подачи искры в топливо для сгорания (как раскрыто ниже).
В зависимости от колебания влажности, можно увеличивать или уменьшать поток РОГ в по меньшей мере одной камере сгорания. Поток РОГ можно увеличивать или уменьшать только в одной камере сгорания, в некоторых камерах сгорания или во всех камерах сгорания. Кроме того, величина изменения потока РОГ может быть одинаковой для всех цилиндров или отличаться от цилиндра к цилиндру в зависимости конкретных условий работы каждого цилиндра.
В еще одном варианте можно отрегулировать момент зажигания в зависимости от результата определения влажности. Например, в по меньшей мере одном состоянии момент зажигания можно изменить в сторону опережения в одном или более цилиндрах во время последующей работы двигателя с подачей топлива, если результат определения влажности относительно высокий. В еще одном примере момент зажигания может быть задан так, чтобы уменьшить детонацию в условиях низкой влажности (например, изменен в сторону запаздывания относительно момента, соответствующего пиковому крутящему моменту). При обнаружении возрастания влажности по результатам определения влажности, момент зажигания можно изменить в сторону опережения для сохранения КПД двигателя и его эксплуатации ближе к области момента зажигания, соответствующего пиковому крутящему моменту, или в этой области.
Момент зажигания также можно изменить в сторону запаздывания в связи с падением влажности. Например, падение влажности окружающей среды с более высокого уровня влажности может привести к детонации. При обнаружении падения влажности датчиком отработавших газов в режимах без подачи топлива, например, ОТРЗ, можно изменить момент зажигания в сторону запаздывания во время последующей работы двигателя с подачей топлива и уменьшить детонацию. Следует отметить, что момент зажигания можно изменять в сторону опережения или запаздывания в одном или более цилиндрах во время последующей работы двигателя с подачей топлива. Кроме того, величина изменения момента зажигания может быть одинаковой для всех цилиндров, или можно изменять момент зажигания в одном или более цилиндрах на разную величину в сторону опережения или запаздывания.
В еще одном варианте осуществления, во время последующей работы двигателя с подачей топлива можно отрегулировать воздушно-топливное отношение в отработавших газах в зависимости от результата измерения влажности окружающей среды. Например, двигатель может работать с бедным (относительно стехиометрического) воздушно-топливным отношением, оптимизированным для низкой влажности. В случае возрастания влажности, может произойти разбавление смеси и, как следствие, пропуск зажигания в двигателе. Если датчик отработавших газов обнаружит возрастание влажности в режимах без подачи топлива, воздушно-топливное отношение можно отрегулировать таким образом, чтобы во время последующей работы с подачей топлива двигатель работал с менее бедным воздушно-топливным отношением. Воздушно-топливное отношение также можно отрегулировать для создания более бедного (относительно стехиометрического) воздушно-топливного отношения во время последующей работы двигателя с подачей топлива в связи падением влажности окружающей среды согласно результату измерения. Это позволяет уменьшить возникновение таких состояний, как пропуск зажигания в двигателе из-за колебаний влажности. В некоторых примерах двигатель может работать со стехиометрическим воздушно-топливным отношением или богатым воздушно-топливным отношением. Воздушно-топливное отношение может не зависеть от влажности окружающей среды, и колебания влажности согласно результатам измерения могут не стать причиной регулирования воздушно-топливного отношения.
Кроме того, как раскрыто выше, если в транспортном средстве применяют один или более ультразвуковых датчиков для выполнения таких операций, как частично автоматизированная парковка, функций полностью автоматизированной парковки или иных функций, изменения влажности могут иметь значение для рабочего диапазона ультразвукового датчика. Соответственно, регулирование параметров работы транспортного средства в зависимости от последнего результата измерения влажности на шаге 925 может дополнительно включать в себя коррекцию порога определения расстояния для ультразвукового датчика (датчиков). Например, могут быть определены подходящие частоты для выполнения измерения расстояния, причем подходящие частоты зависят от результата определения влажности. Например, затухание для некоторых частот может быть тем больше, чем выше процентная относительная влажность. Поэтому можно исключить применение таких частоты для выполнения измерений расстояния, например. Соответственно, можно определить порог определения расстояния для отдельных частот в зависимости от результата определения влажности окружающей среды и сохранить указанный порог, например, в табулированной зависимости в контроллере. Коррекция порога определения расстояния для различных частот ультразвукового датчика в зависимости от результата определения влажности позволяет улучшить рабочий диапазон одного или более ультразвуковых датчиков. Данная идея будет подробнее раскрыта ниже на примерах ФИГ. 11 и ФИГ. 12.
Кроме того, в некоторых примерах, на шаге 925 можно динамически корректировать пороги настроек обнаружения в зависимости от результата определения влажности. Коррекция порогов настроек обнаружения может включать в себя коррекцию уровня напряжения (например, сигнала напряжения от ультразвукового датчика), указывающего на наличие объекта в отличие от шума. А именно, если установлены слишком высокие пороги настроек обнаружения, датчик может быть нечувствителен ко многим объектам. Или же, если установлены слишком низкие пороги настроек обнаружения, датчик может быть чрезмерно чувствителен к шуму, причем может указывать наличие объекта там, где объект отсутствует, например. Так как влажность может влиять на затухание ультразвуковых волн в зависимости от частоты, после того, как станет известна влажность, пороги настроек обнаружения можно скорректировать с учетом изменения затухания из-за относительной влажности. Например, порог настройки обнаружения можно увеличить (например, сделать более строгим), если показатель относительной влажности более низкий (например, 20%), при этом порог настройки обнаружения можно уменьшить (например, сделать менее строгим), если показатель относительной влажности более высокий (например, 90%). Такие примеры являются иллюстративными и не носят ограничительного характера. Кроме того, пороги настроек обнаружения можно задавать в зависимости от частоты (частот), выбранной для обнаружения объектов. А именно, пороги настроек обнаружения могут быть разными в зависимости от частоты или частот, выбранных для обнаружения объектов, при этом пороги настроек обнаружения, зависящие от частоты, можно сохранить в табулированной зависимости в контроллере, например.
Если на шаге 915 будет установлено, что отсутствуют условия для применения датчиков кислорода во всасываемом воздухе или датчиков кислорода в отработавших газах для определения влажности окружающей среды, способ 900 может перейти на шаг 930. На шаге 930 способ 900 может предусматривать определение влажности посредством одного или более ультразвуковых датчиков, как подробно раскрыто выше на примерах ФИГ. 4-7. Так как методика определения влажности посредством ультразвуковых датчиков уже была раскрыта ранее, для краткости будет опущено повторное описание данной методики. При этом следует понимать, что любые аспекты способов на ФИГ. 4-7 можно применять для определения влажности окружающей среды при помощи ультразвукового датчика (датчиков).
Например, в некоторых случаях одна или более камер могут служить для выявления подходящих объектов для измерений влажности посредством ультразвукового датчика, как раскрыто выше на примере ФИГ. 7. При этом в некоторых случаях транспортное средство может не быть оборудовано камерой. В таком примере один или более ультразвуковых датчиков можно систематически проверять, используя способы, раскрытые выше на примерах ФИГ. 4-6, для определения влажности окружающей среды. Иными словами, обнаружение присутствия объекта можно выполнять посредством ультразвукового датчика, расположенного на транспортном средстве, и/или одной или более бортовых камер. Хотя это и не показано на ФИГ. 9 явным образом, следует понимать, что, если отсутствуют условия для определения влажности окружающей среды посредством датчиков кислорода во всасываемом воздухе или отработавших газах на шаге 915, и последующие попытки определения влажности окружающей среды с помощью ультразвукового датчика (датчиков) окажутся безуспешными (например, подходящие объекты не будут выявлены камерами и/или ультразвуковыми датчиками), выполнение способа 900 можно отсрочить до тех пор, пока не будет определено наличие соответствующих условий для определения влажности окружающей среды.
Далее, на шаге 925, способ 900 может предусматривать регулирование параметров работы транспортного средства в зависимости от последнего результата измерения влажности, определенного с помощью ультразвукового датчика (датчиков). Так как шаг 925 исчерпывающе описан выше, повторное описание множества возможных регулировок параметров работы транспортного средства в зависимости от результата определения изменения влажности для краткости будет опущено. При этом следует понимать, что все параметры работы транспортного средства, регулируемые в зависимости от результата определения влажности посредством датчика (датчиков) кислорода во всасываемом воздухе или отработавших газах, или любой из них можно также регулировать в зависимости от результата определения влажности посредством одного или более ультразвуковых датчиков.
Таким образом, изменения параметров окружающей среды (например, температуры, давления и т.п.), влияющих на влажность, могут служить основанием для измерения влажности, причем измерение влажности можно выполнять в зависимости от параметров работы транспортного средства для повышения вероятности получения точного показателя влажности окружающей среды. Иными словами, определение параметров работы транспортного средства в связи с запросом измерения влажности позволяет определить подходящий способ определения влажности и реализовать его в соответствии со способом 900 на ФИГ. 9.
В еще одном примере ультразвуковой датчик может служить для регулирования параметров работы транспортного средства, причем наличие сведений о процентной относительной влажности обеспечивает дополнительное преимущество, состоящее в возможности регулирования параметров работы транспортного средства. В таком примере ультразвуковой датчик (датчики) можно дополнительно задействовать для определения влажности, при этом работу транспортного средства дополнительно регулируют в зависимости от результата измерения влажности. А именно, одним из побочных продуктов сгорания дизельного топлива являются частицы углерода, именуемые «сажа». Устройства снижения токсичности выбросов, например, фильтры твердых частиц дизельного двигателя (ФТЧДД) (например, 72), уменьшают выбросы сажи из двигателя за счет улавливания частиц сажи. Фильтр можно периодически регенерировать, когда происходит насыщение фильтра сажей. Например, температуру фильтра можно повысить до заранее заданного уровня для окисления или сжигания скопившихся твердых частиц. В некоторых примерах регенерацию можно выполнять путем впрыска дополнительного топлива в поток отработавших газов. В других примерах регенерацию можно выполнять путем изменения параметров работы двигателя, например, для повышения температуры отработавших газов. В дополнительных примерах можно задействовать нагреватель (например, 75) для выборочного нагрева ФТЧДД. Регенерация фильтра может происходить в нормальных условиях движения, либо ее можно запускать в другие моменты, например, когда транспортное средство остановлено, при выдаче соответствующей команды водителем транспортного средства, во время технического обслуживания транспортного средства и т.п. Поскольку регенерация предусматривает повышение температура отработавших газов, может быть предпочтительно выполнять ее только в том случае, если будет определено, что объект находится на определенном расстоянии от выхлопной трубы.
При этом одним из факторов, могущих повлиять на необходимое расстояние между объектом и выхлопной трубой транспортного средства во время события регенерации ФТЧДД, может быть процентная относительная влажность. Например, теплопередача через воздух может зависеть от температуры и влажности окружающей среды. Поэтому, если известны и температура, и влажность окружающей среды, можно соответствующим образом скорректировать пороги для расстояния между объектом и выхлопной трубой для конкретного события регенерации ФТЧДД, как будет подробнее раскрыто ниже.
На ФИГ. 10 изображена диаграмма 1000, иллюстрирующая зависимость между температурой, влажностью и теплопроводностью воздуха (в ваттах на метр на кельвин). А именно, ось х представляет температуру воздуха в диапазоне от 0°С до 100°С, а ось у - теплопроводность воздуха в диапазоне от 0.024 Вт/м*К до 0.033 Вт/м*К. Кроме того, представлен ряд графиков процентной влажности. А именно, график 1005 представляет 0%-ную влажность, график 1010 - 10%-ную влажность, график 1015 - 20%-ную влажность, график 1020 - 30%-ную влажность, график 1025 - 40%-ную влажность, график 1030 - 50%-ную влажность, график 1035 - 60%-ную влажность, график 1040 - 70%-ную влажность, график 1045 - 80%-ную влажность, график 1050 - 90%-ную влажность, а график 1055 - 100%-ную влажность. Из диаграммы видно, что теплопроводность воздуха зависит от температуры и влажности. Например, теплопроводность воздуха при 100%-ной влажности возрастает с 0°С до приблизительно 60°С. При этом, если температура продолжает расти, теплопроводность падает. Так как теплопроводность зависит от температуры и влажности окружающей среды, если известны обе переменные (температура и влажность окружающей среды), можно определить теплопроводность воздуха и соответствующим образом скорректировать порог для расстояния между выхлопной трубой и выявленным объектом по способу, который будет подробно раскрыт на ФИГ. 11.
На ФИГ. 11 раскрыт высокоуровневый пример способа для выполнения процесса регенерации ФТЧДД. А именно, если имеют место условия для регенерации ФТЧДД, и определено, что скорость транспортного средства ниже пороговой, можно определить наличие объектов вблизи выхлопной трубы транспортного средства и расстояние между ними и выхлопной трубой, а также определить влажность окружающей среды и температуру окружающей среды. По результатам определения расстояния до объектов вблизи выхлопной трубы, а также влажности и температуры окружающей среды, можно скорректировать порог расстояния таким образом, чтобы при нахождении объекта на расстоянии от выхлопной трубы меньше скорректированного порогового расстояния регенерацию фильтра можно было отсрочить до наступления условий, более благоприятных для регенерации ФТЧДД. Иначе говоря, способ на ФИГ. 11 содержит шаги, на которых: осуществляют регенерацию фильтра твердых частиц, соединенного с низом кузова автотранспортного средства, путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего горячие газы выходят из задней части автотранспортного средства; выбирают выбранный датчик на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории горячих газов, выходящих из задней части автотранспортного средства; и отсрочивают или прерывают регенерацию в связи с наличием объекта в пределах заранее заданного расстояния от горячих газов, выходящих из задней части автотранспортного средства. В качестве одного примера, способ может дополнительно содержать шаг, на котором измеряют температуру воздуха вблизи места выхода горячих газов из задней части автотранспортного средства; определяют теплопроводность воздуха по меньшей мере частично по результатам определения относительной влажности и температуры воздуха; и корректируют порог расстояния для процесса регенерации, причем коррекция порога расстояния включает в себя уменьшение порога расстояния при уменьшении теплопроводности, и увеличение порога расстояния при увеличении теплопроводности.
Способ 1100 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 1100 может быть реализован контроллером, например, контроллером 12 на ФИГ. 1, и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 1100 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, ультразвуковой датчик (датчики) (например, 185), камеру (камеры), систему 74 подачи углеводородного (УВ) восстановителя (например, 74), топливную форсунку (форсунки) (например, 66), нагреватель ФТЧДД (например, 75) и т.п., согласно нижеследующему способу.
Выполнение способа 1100 начинают на шаге 1105, при этом способ может предусматривать определение текущих параметров работы транспортного средства. Параметры работы можно оценивать, измерять и/или опосредованно определять, при этом в их число могут входить один или более из таких параметров, как: скорость транспортного средства, местоположение транспортного средства и т.п., ряд параметров двигателя, например, состояние двигателя, нагрузка двигателя, частота вращения двигателя, отношение В/Т и т.п., ряд параметров топливной системы, например, уровень топлива, тип топлива, температура топлива и т.п., ряд параметров системы улавливания топливных паров, например, загрязненность канистры улавливания топливных паров, давление в топливном баке и т.п.
Далее, на шаге 1110, способ 1100 может предусматривать определение состояния загрязненности фильтра твердых частиц дизельного двигателя (ФТЧДД) (например, 72). Можно применять различные стратегии для определения состояния загрязненности ФТЧДД на предмет того, нужна ли регенерация ФТЧДД. Например, пороговый перепад давления на ФТЧДД может быть признаком превышения порогового состояния загрязненности ФТЧДД. В таком примере один датчик давления (например, 80) может быть расположен выше по потоку от ФТЧДД, а еще один датчик давления (например, 82) - ниже по потоку от ФТЧДД, с возможностью передачи значения перепада давления на ФТЧДД в контроллер транспортного средства. В других примерах состояние загрязненности ФТЧДД можно определять опосредованно или оценивать в зависимости от количества миль, пройденных транспортным средством после предыдущего процесса регенерации ФТЧДД. В еще одном примере состояние загрязненности ФТЧДД можно определять опосредованно или оценивать в зависимости от периода работы двигателя после предыдущего процесса регенерации ФТЧДД. Такие примеры носят иллюстративный, но ни в коей мере не ограничивающий, характер. Например, можно использовать другие известные из уровня техники способы определения состояния загрязненности ФТЧДД без отступления от объема раскрываемого изобретения.
Далее, на шаге 1115, можно определить, соблюдены ли условия для выполнения процесса регенерации ФТЧДД. Например, если будет определено, что состояние загрязненности ФТЧДД превышает заранее заданный порог, о котором шла речь выше на шаге 1110 способа 1100, может быть определено, что условия для регенерации ФТЧДД соблюдены. При этом, если условия для регенерации ФТЧДД отсутствуют, способ 1100 может перейти на шаг 1120. На шаге 1120 способ 1100 может предусматривать сохранение текущих параметров работы транспортного средства. Например, на шаге 1120 способ 1100 может предусматривать продолжение работы двигателя без регенерации ФТЧДД с возможностью продолжения накапливания сажи в ФТЧДД и контроля состояния загрязненности ФТЧДД.
Если на шаге 1115 будет определено, что условия для регенерации соблюдены, способ 1100 может перейти на шаг 1125 и может предусматривать определение того, едет ли транспортное средство с превышением заранее заданного порога скорости. Например, заранее заданный порог скорости может представлять собой заранее заданную пороговую скорость, при которой конвективная теплопередача от наружного воздуха окружающей среды может быть достаточной для снижения температур на выходе отработавших газов до температуры ниже пороговой. В таком примере потенциальные проблемы с объектами, расположенными вблизи выхлопной трубы, можно не учитывать в связи с малой вероятностью того, что температуры отработавших газов создадут значительные проблемы, благодаря снижению температур на выходе отработавших газов за счет потока воздуха. Кроме того, движение транспортного средства со скоростью выше заранее заданного порога дополнительно снижает вероятность нахождения объекта вблизи выхлопной трубы и, тем самым, устраняет причины для серьезного опасения. Соответственно, если на шаге 1125 будет определено, что транспортное средство едет с превышением заранее заданного порога скорости, способ 1100 может перейти на шаг 1130, и может предусматривать выполнение процесса регенерации без определения того, находится ли какой-либо объект в пределах заранее заданного расстояния от горячих газов, выходящих из задней части автотранспортного средства.
Регенерация ФТЧДД на шаге 1130 может включать в себя регулирование параметров работы двигателя для обеспечения возможности регенерации ФТЧДД. Например, контроллер двигателя может содержать сохраненные в памяти инструкции для регенерации ФТЧДД. В число примеров могут входить: задействование нагревателя (например, 75), соединенного с ФТЧДД, или повышение температуры отработавших газов двигателя (например, за счет работы на богатой смеси или непосредственного впрыска топлива в отработавшие газы), причем за счет повышения температуры отработавших газов двигателя можно повысить температуру ФТЧДД для превращения сажи в ФТЧДД в золу.
Регенерация ФТЧДД на шаге 1130 также может включать в себя определение того, находится ли скопление сажи ниже заранее заданного порога. Например, заранее заданный порог может представлять собой нижний порог, ниже которого регенерацию ФТЧДД можно прекратить. Например, регенерацию можно продолжать до тех пор, пока скопление сажи не станет ниже заранее заданного порога. В таком примере состояние загрязненности ФТЧДД можно определять по перепаду давления на ФТЧДД. При этом, как сказано выше, можно использовать другие способы определения состояния загрязненности ФТЧДД без отступления от объема раскрываемого изобретения.
Если загрязненность ФТЧДД достаточно низкая (например, ниже заранее заданного порога), регенерацию ФТЧДД можно прекратить. Прекращение может включать в себя прекращение действия любого параметра работы транспортного средства, способствующего нагреву фильтра. Например, если в отработавшие газы впрыскивали топливо, его впрыск можно прекратить. В еще одном примере, если был задан впрыск топлива в двигатель для создания богатой смеси, такой впрыск топлива можно прекратить и возобновить впрыск топлива в режиме работы по умолчанию, причем режим работы по умолчанию может представлять собой рабочее состояние до выполнения процесса регенерации ФТЧДД. В дополнительных примерах, если был включен нагреватель для регенерации ФТЧДД, нагреватель можно выключить. Во всех таких примерах указанными действиями может управлять контроллер транспортного средства (например, 12) путем направления сигналов различным исполнительным устройствам (например, топливным форсункам, нагревателю) для прекращения операции регенерации.
Далее, на шаге 1135, способ 1100 может предусматривать обновление параметров работы транспортного средства. Например, состояние загрязненности ФТЧДД можно обновить с учетом последнего процесса регенерации ФТЧДД. Обновленные данные можно сохранить в памяти контроллера, например. Кроме того, с учетом процесса регенерации и последующего состояния загрязненности ФТЧДД, можно обновить график регенерации в памяти контроллера. Например, если график регенерации предусматривает запрашивание процесса регенерации после прохождения заранее заданного количества миль или после заранее заданного количества часов работы двигателя, в контроллере можно обнулить указанные количества для эффективного запрашивания процесса регенерации в будущем. Затем выполнение способа 1100 можно завершить.
Если на шаге 1125 будет определено, что транспортное средство не едет со скоростью выше заранее заданного порога, способ 1100 может перейти на шаг 1140. На шаге 1140 способ 1100 может предусматривать обнаружение объектов вблизи выхлопной трубы транспортного средства и может также предусматривать определение относительной влажности при наличии такой возможности. Например, если транспортное средство оборудовано одной или более повернутыми против движения камерами, контроллер может дать команду этой камере (камерам) осуществить поиск в зоне позади транспортного средства. Пример методики применения имеющейся бортовой камеры (камер) для обнаружения объектов с возможностью определения относительной влажности в случае обнаружения подходящего объекта раскрыт выше в способах на ФИГ. 7 и 4-6. Если определение влажности возможно, следует понимать, что дополнительно можно определить температуру окружающей среды, как раскрыто выше на примерах ФИГ. 4-6. Также следует понимать, что можно выбрать ультразвуковой датчик для определения относительной влажности, причем ультразвуковой датчик выбирают из множества датчиков в зависимости от того, перекрывает ли траектория передачи и приема выбранного датчика по меньшей мере часть траектории горячих газов, выходящих из задней части автотранспортного средства.
Так как выше уже было исчерпывающе раскрыто то, как можно использовать одну или более камер для обнаружения объектов, которые могут быть расположены вблизи от выхлопной трубы, повторное описание приводиться не будет. Вкратце, контроллер может дать команду одной или более камерам осуществить поиск объектов позади транспортного средства, могущих находиться в непосредственной близости от выхлопной трубы. Если такие объекты будут обнаружены, можно дополнительно определить, как раскрыто выше, выглядят ли объекты неподвижными относительно транспортного средства, движется ли транспортное средство или припарковано ли оно. Например, могут быть получены несколько изображений с камер, причем, если будет определено, что происходит изменение положения, размера или формы объектов от одного изображения к другому, можно установить, что выявленный объект может не быть неподвижным относительно транспортного средства. В некоторых примерах можно дополнительно или взамен задействовать ультразвуковые датчики для выявления объектов и определения того, выглядят ли выявленные объекты неподвижными относительно транспортного средства.
Если с помощью одной или более повернутых против движения камер (или ультразвуковых датчиков) будут определены потенциальные объекты, могущие быть неподвижными относительно транспортного средства (например, автотранспортное средство, движущееся с той же скоростью и в том же направлении, что и транспортное средство, в котором предпринимают попытку выполнить процесс регенерации ФТЧДД), далее можно определить влажность по способам, раскрытым выше на ФИГ. 4-6. Как сказано выше, следует понимать, что ультразвуковой датчик может быть выбран для применения при определении влажности на основании того, что ультразвуковые сигналы перекрывают по меньшей мере часть траектории горячих газов, выходящих из задней части транспортного средства. Кроме того, при определении температуры окружающей среды, может быть выбран датчик температуры, расположенный в непосредственной близости от выхлопной трубы транспортного средства.
В некоторых примерах транспортное средство может не ехать, а быть неподвижно (например, припарковано). В некоторых примерах регенерация в припаркованном состоянии может включать в себя включение водителем транспортного средства нейтральной передачи в трансмиссии транспортного средства (не показана), включение парковочного тормоза (не показан), нажатие и отпускание педали сцепления (не показана), и нажатие и удержание кнопки регенерации на приборной панели транспортного средства до тех пор, пока не возрастет частота вращения двигателя, когда может быть начат процесс регенерации ФТЧДД. В таком примере, когда регенерация будет завершена, сигнальные лампочки на приборной панели могут погаснуть, указывая на завершение события регенерации. Когда транспортное средство припарковано, одна или более повернутых против движения камер и/или ультразвуковых датчиков могут обнаружить один или более объектов вблизи выхлопной трубы, при этом может быть получен точный результат измерения влажности, как сказано выше и в соответствии со способами, раскрытыми выше на примерах ФИГ. 4-6.
Как сказано выше, в связи с возможным влиянием влажности на рабочий диапазон ультразвукового датчика, определение относительной влажности позволяет скорректировать (исправить) порог определения расстояния для ультразвукового датчика, используемого для определения расстояния между транспортным средством и целевым объектом. Например, в связи с тем, что для некоторых частот возможно дифференцированное затухание в зависимости от относительной влажности, порог определения расстояния для отдельных частот может быть определен в зависимости от результата определения относительной влажности и сохранен в табулированной зависимости в контроллере (например, 12). Например, при высоких результатах определения влажности можно использовать частоты в нижнем диапазоне (20-40 кГц), а не более высокие частоты, для улучшения рабочего диапазона ультразвукового датчика.
Кроме того, с целью обнаружения объектов вблизи выхлопной трубы транспортного средства, для определения относительной влажности и обнаружения объектов на шаге 1140 можно задействовать только те один или более ультразвуковых датчиков, которые сформированы на транспортном средстве с возможностью обнаружения объектов позади транспортного средства.
В некоторых примерах транспортное средство может не быть оборудовано одной или более повернутыми против движения камерами. В таком примере одному или более ультразвуковым датчикам, расположенным в задней части транспортного средства, может быть дана команда выполнить оценку относительной влажности и измерение расстояния по способам, раскрытым выше и представленным на ФИГ. 4-6. Например, ультразвуковые датчики можно использовать взамен камер для обнаружения объектов вблизи выхлопной трубы. Ультразвуковые датчики также выполнены с возможностью обнаружения объектов, выглядящих неподвижными относительно транспортного средства (например, определяемых с одним и тем же временем прохождения для двух и более ультразвуковых частот), что позволяет получить результат измерения влажности и, благодаря этому, точно измерить расстояние.
Далее, на шаге 1145, если ни один объект не был обнаружен, способ 1100 может перейти на шаг 1130, и может выполнить регенерацию ФТЧДД, как подробно раскрыто выше. При этом, если объекты были обнаружены и, по возможности, был определен результат оценки влажности, способ 1100 может перейти на шаг 1150.
Как сказано выше, теплопроводность воздуха может зависеть от температуры воздуха и относительной влажности. Соответственно, в случае обнаружения объектов и выполнения измерения влажности, способ 1100 может предусматривать измерение температуры окружающей среды на шаге 1150. Как сказано выше, измерение температуры окружающей среды можно выполнять посредством датчика (например, 127) температуры наружного воздуха (ТНВ). Результат такого определения температуры наружного воздуха можно сохранить в памяти контроллера (например, 12). После обнаружения объекта и определения относительной влажности (по возможности) и температуры воздуха окружающей среды, способ 1100 может перейти на шаг 1155. На шаге 1155 способ 1100 может предусматривать коррекцию порога расстояния в зависимости от результата измерения относительной влажности и результата определения температуры окружающей среды, при этом температуру воздуха измеряют вблизи выхода горячих газов из задней части автотранспортного средства. Например, порог расстояния может представлять собой расстояние, при превышении которого можно выполнить процесс регенерации ФТЧДД, не опасаясь того, что тепло от отработавших газов может отрицательно повлиять на обнаруженный объект (или объекты). Если определить влажность не представилось возможным, можно не корректировать порог расстояния, а использовать заранее заданный порог расстояния.
А именно, как показано на ФИГ. 10, возможно колебание теплопроводности воздуха в зависимости от влажности и температуры. Например, при 60°С и 80%-ной влажности (например, линия 1045), теплопроводность воздуха может составлять ~0.0275 Вт/м*К, а при 90°С и 80%-ной влажности теплопроводность воздуха может составлять ~0.026. Иными словами, теплопроводность может падать при возрастании температуры с 60°С до 90°С, когда влажность окружающей среды составляет 80%. Таким образом, при возрастании температуры с 60°С до 90°С в условиях, когда влажность окружающей среды составляет 80%, передача тепла в воздухе может происходить не так эффективно. Поэтому способ 1100 может предусматривать коррекцию порога расстояния для процесса регенерации, причем коррекция порога расстояния включает в себя уменьшение порога расстояния при уменьшении теплопроводности и увеличение порога расстояния при увеличении теплопроводности.
Указанные условия носят иллюстративный характер, при этом следует понимать, что порог расстояния можно соответствующим образом корректировать в зависимости от любых результатов измерения относительной влажности и температуры в соответствии с диаграммой 1000 на ФИГ. 10. В одном примере в памяти контроллера может быть сохранена табулированная зависимость, причем табулированная зависимость может содержать величину, на которую можно скорректировать порог расстояния в зависимости от результатов определения относительной влажности и температуры. Это позволяет без труда определить величину, на которую можно скорректировать порог расстояния, для любой пары результатов определения относительной влажности и температуры. Важно отметить, что применение ультразвукового датчика для определения и влажности окружающей среды, и расстояния между датчиком и выявленным объектом позволяет повысить точность коррекции порога расстояния по сравнению с тем, когда влажность окружающей среды опосредованно определяют с помощью других средств (например, датчиков кислорода во всасываемом воздухе или отработавших газах). А именно, поскольку влажность можно быть локальной, определение влажности с помощью ультразвуковых датчиков непосредственно перед коррекцией порога расстояния может создавать преимущество, состоящее в возможности точного определения влажности специально для коррекции порога расстояния. Кроме того, поскольку ультразвуковой датчик для определения влажности может быть выбран на основании того, что по меньшей мере часть траектории передачи и приема ультразвукового датчика перекрывает траекторию горячих газов, выходящих из задней части автотранспортного средства, результаты определения влажности могут отражать именно влажность вблизи задней части транспортного средства, где ожидают выхода горячих газов во время процесса регенерации ФТЧДД.
После коррекции порога расстояния в зависимости от результатов определения влажности и температуры окружающей среды на шаге 1155, способ 1100 может перейти на шаг 1160. На шаге 1160 способ 1100 может предусматривать определение того, является ли расстояние между целевым объектом и выхлопной трубой больше или меньше скорректированного порога расстояния. Например, посредством ультразвуковых датчиков можно определять расстояние между выявленным объектом и выхлопной трубой. Если будет определено, что объект расположен на расстоянии, которое меньше скорректированного порога расстояния от выхлопной трубы, способ 1100 может предусматривать возврат на шаг 1125 и продолжение определения наличия условий для выполнения процесс регенерации ФТЧДД. При этом, если будет определено, что объект расположен на расстоянии, превышающем скорректированный порог расстояния от выхлопной трубы, способ 1100 может перейти на шаг 1130 и может выполнить регенерацию ФТЧДД, как подробно раскрыто выше.
Хотя это и не показано явным образом на ФИГ. 11, следует понимать, что во время регенерации ФТЧДД, с помощью одной или более бортовых камер и ультразвуковых датчиков можно следить за тем, чтобы какой-либо объект не пересек скорректированный порог расстояния во время регенерации ФТЧДД. Например, контроллер может дать команду одной или более камерам записывать изображения в ходе события регенерации ФТЧДД и обрабатывать изображения, как указано выше, с помощью алгоритмов распознавания объектов, хранящихся в памяти контроллера, с тем, чтобы можно было определить, произошло ли видимое перемещение каких-либо объектов во время события регенерации, и, что особо важно, произошло ли видимое перемещение объектов в положение, могущее находиться на расстоянии меньше скорректированного порога расстояния от выхлопной трубы транспортного средства. Такие примеры могут включать в себя определение расстояния между выхлопной трубой и выявленными объектами с помощью ультразвукового датчика (датчиков). В случае, когда транспортное средство может не содержать одну или более камер, расстояние между выявленным объектом (объектами) и выхлопной трубой транспортного средства можно определять посредством только ультразвукового датчика (датчиков). В примере, где будет определено, что объект или объекты расположены на расстоянии меньше скорректированного порога расстояния, событие регенерации может быть резко прекращено или приостановлено. Данное действие может быть реализовано контроллером, например. Контроль во время события регенерации ФТЧДД посредством одной или более камер и ультразвукового датчика (датчиков) позволяет без труда выявлять присутствие объекта на расстоянии меньше скорректированного порога расстояния с тем, чтобы можно было приостановить событие регенерации ФТЧДД. Иначе говоря, способ 1100 может содержать шаги, на которых: выполняют процесс регенерации, если объект расположен на расстоянии, большем порогового; контролируют объект и зону вблизи задней части транспортного средства посредством одной или более камер во время процесса регенерации; и прекращают процесс регенерации, если во время процесса регенерации будет выявлено, что данный или иной объект расположен на расстоянии меньше порогового.
Как сказано выше, определение температуры окружающей среды и влажности окружающей среды - двух шум-факторов для ультразвуковых датчиков - позволяет корректировать порог определения расстояния для улучшения рабочего диапазона ультразвукового датчика. При этом также может быть нужно выбрать оптимальные частоты для конкретных измерений расстояния с учетом того, что целевой объект может быть удален на более короткое расстояние (малая удаленность), среднее расстояние (средняя удаленность) или более длинное расстояние (большая удаленность) от ультразвукового датчика. Использование оптимальной частоты для конкретного измерения расстояния со скорректированным порогом определения расстояния позволяет дополнительно улучшить рабочий диапазон ультразвукового датчика. В некоторых примерах оптимальная частота может зависеть от скорректированного порога определения расстояния и необходимого рабочего диапазона датчика. В некоторых примерах посредством одной или более бортовых камер может быть захвачено множество изображения среды вблизи транспортного средства, причем необходимый рабочий диапазон датчика по меньшей мере частично определяют посредством одной или более камер, как будет подробнее раскрыто ниже.
На ФИГ. 12 раскрыт высокоуровневый пример способа для коррекции порога определения расстояния для ультразвукового датчика и дополнительного определения оптимальной частоты (частот) для измерений расстояния. А именно, определение влажности окружающей среды и температуры окружающей среды позволяет учитывать два шум-фактора для ультразвуковых измерений расстояния, что позволяет корректировать порог определения расстояния для ультразвукового измерения расстояния. В зависимости от скорректированного порога определения расстояния можно выбрать оптимальную частоту (частоты) для последующего определения расстояния. В некоторых примерах тот же самый ультразвуковой датчик, что используют для определения влажности, можно впоследствии использовать для выполнения измерения расстояния. При этом в других примерах датчик, используемый для определения относительной влажности, может представлять собой другой датчик.
Способ 1200 будет раскрыт на примерах систем, раскрытых в настоящем документе и представленных на ФИГ. 1, при этом следует понимать, что аналогичные способы можно применять к другим системам без отступления от объема раскрываемого изобретения. Способ 1200 может быть реализован контроллером, например, контроллером 12 на ФИГ. 1, и может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для реализации способа 1200 и других раскрытых в настоящем документе способов может осуществлять контроллер в соответствии с инструкциями в его памяти и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1. Контроллер может задействовать исполнительные устройства топливной системы и системы улавливания топливных паров, например, ультразвуковой датчик (датчики) (например, 185), камеру (камеры) (например, 186) и т.п., согласно нижеследующему способу.
Выполнение способа 1200 начинают на шаге 1205, который может предусматривать определение того, обнаружен ли целевой объект. Как раскрыто выше на примере ФИГ. 7, обнаружение и определение целевых объектов в некоторых примерах можно выполнять посредством одной или более бортовых камер. Так как процесс обнаружения объектов посредством одной или более камер всесторонне раскрыт выше, его повторное полное описание будет для краткости опущено. При этом следует понимать, что на шаге 1205 обнаружение объектов и определение подходящих объектов можно осуществлять посредством одной или более камер, как раскрыто выше на ФИГ. 7. В некоторых примерах транспортное средство может не быть оборудовано одной или более камерами, либо транспортное средство может быть оборудовано такой камерой (камерами), но не обязательно в оптимальном положении для обнаружения всех потенциальных объектов вокруг транспортного средства. В таком примере обнаруживать и определять подходящие целевые объекты можно, дополнительно или взамен, посредством одного или более ультразвуковых датчиков. В некоторых примерах поиск объекта может быть запущен в связи с наличием условий для определения влажности, например, изменения температуры или давления окружающей среды, определенных как раскрыто выше на шаге 905 способа 900. В еще одном примере подходящие объекты можно обнаруживать во время процесса частично или полностью автоматизированной парковки транспортного средства. Такие примеры носят иллюстративный, а не ограничивающий, характер.
Если на шаге 1205 не будут определены какие-либо подходящие целевые объекты, способ 1200 может перейти на шаг 1210, и может предусматривать сохранение текущих параметров работы транспортного средства. Например, если контроллеру была дана команда искать подходящие целевые объекты посредством камеры (камер) и/или ультразвукового датчика (датчиков), на шаге 1205 способа 1200 поиск подходящих целевых объектов может быть продолжен.
Или же, если на шаге 1205 способа 1200 будет определено, что может быть выявлен подходящий целевой объект, способ 1200 может перейти на шаг 1215. На шаге 1215 способ 1200 может предусматривать определение влажности посредством ультразвукового датчика, как раскрыто выше. А именно, определение влажности может включать в себя определение температуры окружающей среды на шаге 1220, например, посредством датчика ТНВ (например, 127). Определение влажности окружающей среды может дополнительно включать в себя выполнение алгоритма изменения частоты (ФИГ. 5) и вычисление разности затухания (ФИГ. 6). Иными словами, определение влажности окружающей среды на шаге 1215 может включать в себя определение влажности по высокоуровневому способу на ФИГ. 4. Так как способ для определения влажности посредством ультразвукового датчика был подробно раскрыт выше, его повторное углубленное разъяснение будет для краткости опущено. При этом следует понимать, что определение влажности окружающей среды на шаге 1215 можно выполнять по способу, раскрытому на ФИГ. 4.
Определив влажность (и температуру окружающей среды), способ 1200 может перейти на шаг 1230. На шаге 1230 способ 1200 может предусматривать коррекцию порога определения расстояния для ультразвукового датчика, посредством которого выполняли определение влажности. Например, максимальная удаленность, на которой ультразвуковой датчик способен обнаружить целевой объект, может зависеть от затухания звука, причем одним из основных шум-факторов в части затухания звука может быть влажность окружающей среды. Кроме того, точное определение скорости звука может быть важным для преобразования времени прохождения с момента передачи до момента приема ультразвукового сигнала в результат измерения расстояния. Так как на скорость звука влияет температура окружающей среды, наличие сведений о температуре окружающей среды может дополнительно улучшить рабочий диапазон ультразвукового датчика. Кроме того, как указано выше, сведения о температуре окружающей среды могут быть нужны для точной оценки влажности окружающей среды. Соответственно, порог определения расстояния может быть скорректирован на шаге 1230 в зависимости от результатов определения влажности и температуры окружающей среды. В некоторых примерах порог определения расстояния может зависеть от частоты, в связи с чем порог определения расстояния может быть разным для разных частот. Например, при 100 кГц и процентной относительной влажности 80% не может быть получен результат измерения расстояния больше определенного расстояния, однако он может быть получен при использовании 30 кГц благодаря уменьшению затухания звука при 30 кГц по сравнению со 100 кГц при 80%-ной влажности. Данный пример носит иллюстративный характер. Соответственно, если будет определена влажность, можно определить порог (пороги) определения расстояния при разных частотах для данного результата определения влажности и сохранить их в табулированной зависимости, например. Иначе говоря, в некоторых примерах коррекция порога определения расстояния для ультразвукового датчика в зависимости от показателя относительной влажности может включать в себя определение подходящих частот для выполнения измерений расстояния в зависимости от показателя относительной влажности.
Далее, на шаге 1235, способ 1200 может предусматривать определение необходимого рабочего диапазона ультразвукового датчика, чтобы датчик можно было использовать для измерения расстояния в зависимости от необходимого рабочего диапазона датчика. А именно, определение необходимого рабочего диапазона может включать в себя определение того, расположен ли конкретный объект, расстояние до которого нужно определить, на малой удаленности (например, менее 1 метра), на средней удаленности (например, более одного метра, но менее 2 метров) или на большой удаленности (например, более 2 метров). В одном примере определение удаленности положения конкретного объекта от ультразвукового датчика может включать в себя оценку расстояния (удаленности) посредством одной или более бортовых камер при их наличии. Например, известное из уровня техники программное обеспечение распознавания объектов, алгоритмы для которого могут храниться в памяти контроллера, позволяет оценивать приблизительное расстояние просто посредством бортовых камер. В еще одном примере приблизительный результат вычисления можно определить по результату начального определения ультразвуковым датчиком. В таком примере, поскольку расстояние до объекта неизвестно, ультразвуковой датчик может направить и принять сигналы с одной или более конкретными частотами для вычисления приблизительного расстояния. Это вычисление может включать в себя определение того, представляет ли расстояние между ультразвуковым датчиком и целевым объектом собой малую удаленность, среднюю удаленность или большую удаленность от датчика.
Соответственно, определение необходимого рабочего диапазона ультразвуковых датчиков на шаге 1235 может включить в себя поиск данных в табулированной зависимости в памяти контроллера, например, табулированной зависимости на ФИГ. 13.
На ФИГ. 13 раскрыт пример табулированной зависимости оптимальной ультразвуковой частоты с возможностью использования для измерений расстояния в зависимости от того, будет ли определено, что целевой объект расположен на малой удаленности, средней удаленности или большой удаленности от ультразвукового датчика, задействованного для выполнения измерения расстояния. Как будет раскрыто ниже, также можно выбрать необходимую частоту (частоты) в зависимости от скорректированных порогов определения расстояния, речь о которых шла выше.
В качестве одного примера, если будет определено, что необходимое расстояние до целевого объекта представляет собой малую удаленность от ультразвукового датчика, все частоты, на которых ультразвуковой датчик способен осуществлять передачу (например, от 20 кГц до 100 кГц), можно, теоретически, использовать для измерения расстояния, так как затухание звука может не иметь большого значения при малой удаленности. При этом, с учетом порога определения расстояния, некоторые частоты могут быть предпочтительнее других. В любом случае, поскольку при измерениях расстояния малой удаленности большинство частот, если не все частоты, могут обеспечить точные результаты измерения расстояния из-за малого эффекта затухания звука, частота, которая может быть выбрана, может представлять собой оптимальную частоту, для работы на которой рассчитан пьезоэлектрический кристалл ультразвукового датчика. Например, эта частота может представлять собой известное значение и может быть сохранена в памяти контроллера. Если такая частота не является желательной с учетом скорректированного порога определения расстояния из-за потенциального затухания на ней, может быть выбрана, например, более низкая частота.
В качестве еще одного примера, если будет определено, что необходимое расстояние до целевого объекта представляет собой среднюю удаленность от ультразвукового датчика, могут быть выбраны частоты в диапазоне от низких до средних (например, от 20 кГц до 50-60 кГц) для выполнения измерения расстояния с повышенной точностью. В таком примере, если скорректированный порог определения расстояния исключает применение всех потенциальных частот, могут быть выбраны частоты, отличные от исключенных частот. Например, при 60 кГц затухание звука, обусловленное определенной относительной влажностью, может привести к невозможности точного обнаружения объектов (например, измерение расстояния не будет точным), расположенных в 1.5 метра от ультразвукового датчика, при этом другие, более низкие, частоты могут обеспечить точное обнаружение и измерение. Это можно определить с помощью табулированной зависимости скорректированного порога определения расстояния, речь о которой шла выше на шаге 1230 способа 1200. В любом случае, независимо от того, что некоторые частоты в диапазоне от низких до средних могут быть исключены с учетом скорректированного порога определения расстояния, частоту можно выбрать таким образом, чтобы она лежала в диапазоне, обеспечивающем оптимальную точность, и была наиболее близка к оптимальной частоте, на работу на которой рассчитан датчик. Как сказано выше, результат определения оптимальной частоты может быть сохранен в памяти контроллера.
В качестве дополнительного примера, если будет определено, что необходимое расстояние до целевого объекта представляет собой большую удаленность от ультразвукового датчика, может быть выбрана низкая частота (например, от 40 кГц до 20 кГц) для выполнения измерения расстояния с повышенной точностью. Как сказано выше, если скорректированный порог определения расстояния исключает использование всех потенциальных частот, могут быть выбраны частоты, отличные от исключенных. Аналогично тому, что было сказано выше в отношении средней удаленности, независимо от того, исключают ли некоторые частоты или нет, частоту можно выбрать таким образом, чтобы она лежала в диапазоне, обеспечивающем оптимальную точность, и была наиболее близка к оптимальной частоте, на работу на которой рассчитан датчик.
Определив необходимый рабочий диапазон ультразвукового датчика на шаге 1235, способ 1200 может перейти на шаг 1240. На шаге 1240 способ 1200 может предусматривать выполнение измерения или измерений расстояния путем передачи и приема ультразвуковой волны с частотой, выбранной в качестве оптимальной на шаге 1235. Как сказано выше, контроллер может дать команду подачи колеблющегося напряжения на ультразвуковой датчик, в связи с чем происходит преобразование электрического колебания в механические звуковые волны с возможностью их передачи от ультразвукового датчика. Будучи отражены от целевого объекта, эти звуковые волны могут быть приняты датчиком (например, приемником), причем прием звуковых волн включает в себя преобразование механических волн обратно в электрические колебания с возможностью интерпретации их контроллером. По времени прохождения с момента передачи до момента приема отраженных волн можно определить результат измерения расстояния. А именно, как сказано выше, расстояние можно определить по формуле d=c*t/2, где с - скорость звука, a t - время прохождения.
На шаге 1240 также можно дополнительно скорректировать пороги настроек обнаружения в зависимости от показателя влажности. Как сказано выше, коррекция порогов настроек обнаружения может включать в себя регулирование уровня напряжения, указывающего на наличие объекта в отличие от шума, для определения объекта посредством одного или более ультразвуковых датчиков. Пороги настроек обнаружения могут зависеть от частоты или частот, выбранных для обнаружения объектов, при этом пороги настроек обнаружения, зависящие от частоты, могут быть сохранены в табулированной зависимости в контроллере, например.
В некоторых примерах возможны ситуации, когда отношение сигнал-шум при выбранной для выполнения измерения расстояния частоте является по той или иной причине неприемлемым. Например, могло произойти изменение угла целевого объекта или перемещение объекта с одного расстояния на другое и т.п. Поэтому далее, на шаге 1245, способ 1200 может предусматривать определение того, нужна ли дополнительная точность. Если в результате затухания или воздействия какого-либо иного фактора окружающей среды отношение сигнал-шум при выполнении измерения расстояния стало таким, которое не позволяет получить результат оценки необходимого расстояния, способ 1200 может перейти на шаг 1250. На шаге 1250 способ 1200 может предусматривать такие действия, как изменение ультразвуковой частоты с целью улучшения измерений расстояния между ультразвуковым датчиком и целевым объектом. Например, если конкретная частота была выбрана в связи с нахождением объекта на расстоянии средней удаленности от датчика, можно использовать другие частоты, подходящие для оптимального определения расстояния средней удаленности. В некоторых примерах, для определения того, могло ли произойти перемещение целевого объекта (например, относительно ультразвукового датчика, ближе или дальше от него), можно использовать одну или более камер (если транспортное средство оборудовано ими). В дополнительных примерах можно использовать частоты за пределами выбранного диапазона с целью повышения точности измерения расстояния. Например, если ранее прогнозировали, что целевой объект будет находиться на расстоянии средней удаленности, и поэтому была выбрана частота 50 кГц, в случае неполучения удовлетворительного результата оценки расстояния, далее можно использовать более низкую частоту (например, 30 кГц) для уменьшения затухания. Такие примеры носят иллюстративный, а не ограничивающий, характер.
Если на шаге 1245 будет определено, что дополнительная точность не нужна, иными словами, если отношение сигнал-шум переданной и принятой ультразвуковой волны превышает уровень, позволяющий получить необходимый результат (результаты) измерения расстояния, способ 1200 может проследовать на шаг 1255 и может предусматривать определение расстояния до объекта. В одном примере результат такого определения расстояния может быть по меньшей мере временно сохранен в памяти контроллера. Кроме того, в некоторых примерах такую методику определения расстояния можно применять для более эффективного выполнения частично или полностью автоматизированного парковочного маневра, например, в соответствии с системой, раскрытой выше на примере ФИГ. 2.
На ФИГ. 14 раскрыт пример временного интервала 1400, иллюстрирующий выполнение процесса ситуативного определения влажности по способам на ФИГ. 4-7 и ФИГ. 9. Временной интервал 1400 содержит график 1405 изменения наличия условий для определения влажности во времени. Временной интервал 1400 также содержит построенный по времени график 1410, указывающий, включен ли или выключен ли двигатель транспортного средства. Временной интервал 1400 также содержит построенный по времени график 1415, указывающий, запущен ли процесс обнаружения объектов. Временной интервал 1400 также содержит построенный по времени график 1420, указывающий, была ли определена влажность. Временной интервал 1400 также содержит график 1425 изменения величины рециркуляции отработавших газов (РОГ), подаваемых на впуск двигателя, во времени. Временной интервал 1400 также содержит график 1430 изменения относительной влажности во времени.
В момент t0 транспортное средство находится в действии, приводимое в движение двигателем, представленным графиком 1410. Кроме того, в момент t0 не указано, что условия для определения влажности соблюдены. Как сказано выше, условия для процесса определения влажности могут быть соблюдены, если определено, что после предыдущего (например, последнего по времени или непосредственно предшествующего) определения влажности произошло изменение температуры окружающей среды больше порога температуры и/или изменение давления окружающей среды больше порога давления. В число условий для процесса определения влажности также могут входить: пороговое время работы двигателя или превышение порогового расстояния пробега транспортного средства с последнего по времени измерения влажности, или изменение метеоусловий, определенное с помощью других средств, например, посредством ГСОМ с перекрестным сопоставлением с данными из интернета, и т.п.
Так как в момент t0 транспортное средство находится в действии, и отсутствует указание на наличие условий для определения влажности, в данном иллюстративном примере не указано, что запущено обнаружение объектов посредством, например, камеры (камер) и/или ультразвукового датчика (датчиков). При этом возможны ситуации, в которых условия для определения влажности отсутствуют, но обнаружение объектов все же может быть запущено. В число таких примеров может входить событие выполнения парковки транспортного средства, при котором камера (камеры) и/или бортовой ультразвуковой датчик (датчики) могут быть задействованы для частичной автоматизации парковочной операции.
Кроме того, не указано, что определяли влажность после предыдущего измерения влажности, представленного графиком 1420. Следует понимать, что «нет» применительно к графику 1420 может означать ситуацию, в которой влажность не определяли после предыдущего измерения влажности, причем на то, что влажность определяют, может указывать слово «да» применительно к графику 1420.
И наконец, в момент t0 осуществляют рециркуляцию определенного количества отработавших газов на впуск двигателя транспортного средства, причем величину РОГ может по меньшей мере частично определять результат последнего по времени или предыдущего измерения влажности. Применительно к графику 1425, «+» может означать увеличение величин РОГ, а «-» - уменьшение величин РОГ. Кроме того, «отсутствует» (N/A) может означать состояние, в котором не осуществляют рециркуляцию РОГ на впуск двигателя, например, когда двигатель не работает.
В момент t1 указано, что условия для определения влажности соблюдены. Соответственно, можно определить, соблюдены ли условия для определения влажности посредством датчика кислорода в отработавших газах (например, УДКОГ) или иного кислородного датчика, причем результат оценки может быть определен путем попеременной подачи первого и второго напряжений на датчик отработавших газов и формирования показателя влажности по выходным сигналам датчика при первом и втором напряжениях, как раскрыто выше на примере ФИГ. 8. При этом, поскольку указано, что двигатель находится в действии в момент t1, отсутствует указание на наличие условий для определения влажности посредством датчика кислорода в отработавших газах. Вместо него, определение влажности можно выполнить посредством ультразвукового датчика, при условии, что может быть выявлен подходящий объект для получения точного результата измерения влажности.
Поэтому далее, в момент t2, может быть запущено обнаружение объектов. Например, обнаружение объектов может включать в себя использование одной или более камер транспортного средства (например, 186) для выявления подходящих объектов для последующего определения влажности. В других примерах, если транспортное средство не оборудовано одной или более камерами, в качестве альтернативы, выявить потенциальные подходящие объекты для выполнения измерения влажности можно посредством самого ультразвукового датчика (датчиков).
Как сказано выше, обнаружение объектов может включать в себя захват одной или более камерами изображений и их сохранение в памяти контроллера (например, 12). Такие изображения можно обрабатывать с помощью алгоритмов распознавания объектов в памяти контроллера для выявления подходящих объектов для выполнения измерения влажности. Например, в число подходящих объектов могут входить объекты, неподвижные относительно транспортного средства, объекты больше заранее заданного порогового размера, объекты заранее заданной формы, объекты с выявленным отсутствием шероховатости поверхности, объекты с предпочтительным углом ориентации и т.п.
Следует понимать, что между моментами t2 и t3 посредством одной или более камер выявляют подходящий объект для выполнения измерения влажности. Выявив подходящий объект, можно определить положение объектов относительно транспортного средства для задействования ультразвукового датчика, расположенного оптимально для выполнения измерения влажности. Например, как сказано выше, датчик (датчики) камеры (например, 187) могут быть выполнены с возможностью определения приблизительного местоположения объекта относительно транспортного средства, а контроллер может обработать данную информацию для выбора ультразвукового датчика, расположенного оптимально для измерения влажности. А именно, ультразвуковой датчик может быть выбран на основании того, что объект, выявленный одной из камер, расположен в пределах траектории передачи выбранного датчика. Следует понимать, что между моментами t2 и t3 был выбран подходящий объект и ультразвуковой датчик, расположенный оптимально для выполнения измерения влажности. Так как двигатель работает, и был выявлен подходящий объект для выполнения измерения относительной влажности, следует понимать, что подходящий объект может представлять собой другое транспортное средство, едущее по существу с той же скоростью и в том же направлении, что и транспортное средство, где выполняют измерение влажности. Следует понимать, что измерение влажности посредством ультразвуковых датчиков может быть выполнено, когда транспортное средство находится в действии (например, его приводят в движение за счет двигателя или бортового устройства аккумулирования энергии).
Между моментами t2 и t3, после того, как будет выявлен подходящий объект и выбран оптимальный ультразвуковой датчик, можно выполнить измерение влажности. Повторное всестороннее описание способа выполнения измерения влажности будет для краткости опущено. При этом следует понимать, что измерение влажности можно выполнять по способам, раскрытым выше на примерах ФИГ. 4-6. Вкратце, определение влажности может содержать шаги, на которых: передают множество сигналов от одного датчика, каждый на разной частоте, принимают отраженные сигналы переданных сигналов, определяют значения затухания только для каждого из отраженных сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема, определяют разности между парами значений затухания, и преобразуют разности в показатель относительной влажности.
Соответственно, в момент t3 указано, что влажность была определена. А именно, можно точно определить влажность с получением значения влажности, указанного на графике 1430 в момент t3. Определив влажность, можно соответствующим образом отрегулировать некоторые параметры транспортного средства, как подробно раскрыто выше на примере ФИГ. 9. В данном иллюстративном примере временного интервала 1400 для ясности представлен только один параметр работы транспортного средства (РОГ). Поскольку определено, что влажность возросла, РОГ можно уменьшить во избежание работы двигателя на бедной смеси из-за возросшей влажности. Поэтому между моментами t3 и t4 РОГ уменьшают в соответствии с последним по времени результатом измерения влажности. Кроме того, хотя это и не показано явным образом, следует понимать, что самый последний результат измерения влажности можно сохранить в памяти контроллера. Кроме того, хотя это и не показано явным образом, можно отрегулировать один или более дополнительных параметров работы транспортного средства в зависимости от результата измерения влажности. Например, как сказано выше, можно отрегулировать величину опережения или запаздывания зажигания, значение зажигания на границе, результат оценки октанового числа топлива и т.п.
В момент t4 двигатель транспортного средства выключают. В данном примере временного интервала под выключением двигателя можно понимать, помимо прочего, событие отсечки топлива в режиме замедления (ОТРЗ). При этом следует понимать, что во время нахождения двигателя в выключенном состоянии впускной и выпускной клапаны по меньшей мере одного цилиндра можно оставить включенными с возможностью циркуляции воздуха через впускной коллектор в выпускной коллектор.
В момент t5 условия для определения влажности могут вновь быть соблюдены, как видно из графика 1405. Поскольку двигатель выключен в связи с событием ОТРЗ, можно определять влажность посредством датчика кислорода в отработавших газах (например, УДКОГ). Иными словами, при таком событии можно предпочесть выполнение измерения влажности посредством датчика кислорода в отработавших газах, а не посредством ультразвукового датчика. Способ для определения влажности посредством датчика кислорода в отработавших газах подробно раскрыт выше на примере способа на ФИГ. 9. Поэтому повторное углубленное описание того, как можно выполнить определение влажности посредством датчика кислорода в отработавших газах будет опущено. При этом следует понимать, что между моментами t5 и t6 определение влажности может быть выполнено посредством датчиков кислорода в отработавших газах. Соответственно, в момент t6 указано, что определен новый результат измерения влажности окружающей среды, указанный на графике 1420. Поэтому контроллер транспортного средства может заменить предыдущий результат определения влажности на последний результат выбранного определения влажности.
Результат определения влажности окружающей среды может быть сохранен в памяти контроллера с возможностью регулирования рабочих параметров транспортного средства в соответствии с новым результатом определения влажности. Так как с момента t6 по t7 двигатель остается выключенным, величину РОГ, подаваемых в двигатель (например, в данном случае нулевую, так как двигатель выключен), не регулируют. При этом в момент t7 двигатель вновь включают, в связи с чем регулируют величину РОГ, подаваемых в двигатель, в соответствии с самым последним результатом измерения влажности. Иными словами, величину РОГ регулируют в зависимости от влажности, определенной в момент t6 и сохраненной в памяти контроллера.
Между моментами t7 и t8 транспортное средство работает за счет двигателя, при этом параметры транспортного средства регулируют в зависимости от самого последнего результата измерения влажности посредством датчика кислорода в отработавших газах, когда двигатель был выключен (например, вращался без подачи топлива с продолжением функционирования впускного и выпускного клапанов в по меньшей мере одном цилиндре).
На ФИГ. 15 раскрыт пример временного интервала 1500, иллюстрирующий то, как можно корректировать порог расстояния между целевым объектом и выхлопной трубой транспортного средства в зависимости от показателя влажности окружающей среды. Временной интервал 1500 содержит построенный по времени график 1505 наличия условий для регенерации фильтра твердых частиц дизельного двигателя (ФТЧДД). Временной интервал 1500 также содержит график 1510 изменения скорости транспортного средства во времени. Линия 1511 представляет пороговую скорость, при превышении которой можно выполнять регенерацию ФТЧДД, не определяя положение потенциального объекта относительно выхлопной трубы транспортного средства. При этом, если скорость ниже пороговой, при появлении объекта в пределах порогового расстояния от выхлопной трубы процесс регенерации ФТЧДД может быть прерван или отсрочен.
Соответственно, временной интервал 1500 также содержит построенный по времени график 1515, указывающий на то, обнаружен ли какой-либо объект вблизи выхлопной трубы транспортного средства. Временной интервал 1500 также содержит построенный по времени график 1520, указывающий на то, был ли получен результат измерения влажности, причем следует понимать, что «нет» означает, что измерение влажности не выполняли после предыдущей оценки влажности, а «да» - то, что измерение текущей влажности выполнили. Временной интервал 1500 также содержит график 1525 изменения положения объекта относительно выхлопной трубы транспортного средства во времени. В данном иллюстративном примере «-» может означать уменьшение расстояния между объектом и выхлопной трубой транспортного средства, а «+» - рост расстояния между объектом и выхлопной трубой транспортного средства. Линия 1526 обозначает первый порог расстояния, а линия 1527 - скорректированный, второй, порог, причем пороги можно корректировать в зависимости от показателя влажности окружающей среды, например, как раскрыто выше и будет раскрыто ниже. Временной интервал 1500 также содержит график 1530, указывающий на то, происходит ли регенерация ФТЧДД - «да» или «нет». Временной интервал 1500 также содержит график 1535 изменения влажности и график 1540 изменения температуры окружающей среды во времени. Для графика 1540 «+» означает рост (например, повышение) температуры, а «-» - падение (например, снижение) температуры.
В момент t0 следует понимать, что транспортное средство находится в действии и едет с низкой скоростью, на что указывает график 1510. В некоторых примерах такая низкая скорость может указывать на то, что транспортное средство остановлено или по существу остановлено. Как видно из графика 1505, условия для регенерации ФТЧДД отсутствуют. Соответственно, потенциальный целевой объект, представленный графиком 1515, еще не выявляли, поэтому его положение не определено. Так как условия для регенерации ФТЧДД отсутствуют, процесс регенерации ФТЧДД не происходит, как видно из графика 1530. Фактическая влажность близка к 100%, на что указывает график 1535, при этом процесс определения влажности не выполняли с момента последнего по времени выполнения процесса определения влажности, как видно из графика 1520.
В момент t1 указано наличие условий для регенерации ФТЧДД, как видно из графика 1505. Как сказано выше, условия для регенерации ФТЧДД могут быть соблюдены, если достигнут пороговый перепад давления на ФТЧДД по показаниям одного датчика давления (например, 80), расположенного выше по потоку от ФТЧДД, и другого датчика давления (например, 82), расположенного ниже по потоку от ФТЧДД. В число других примеров могут входить: пробег порогового числа миль после предыдущего процесса регенерации ФТЧДД или истечение порогового периода работы двигателя после предыдущего процесса регенерации ФТЧДД.
В связи с запросом регенерации ФТЧДД можно определить, едет ли транспортное средство со скоростью выше пороговой. Пороговая скорость в данном примере временного интервала представлена линией 1511. Если будет определено, что транспортное средство едет со скоростью выше пороговой, можно выполнить регенерацию ФТЧДД без предварительного определения наличия объекта или объектов вблизи выхлопной трубы транспортного средства, так как поток воздуха, обусловленный скоростью движения транспортного средства, может служить для охлаждения и рассеивания отработавших газов, в связи с чем наличие объектов вблизи выхлопной трубы не вызывает беспокойство. Однако в данном примере временного интервала определено, что транспортное средство едет со скоростью по существу ниже пороговой. Поэтому контроллер может запустить поиск целевых объектов, расположенных вблизи выхлопной трубы транспортного средства. Как сказано выше, такой поиск может включать в себя выдачу контроллером команды одной или более бортовым камера (например, 186) осуществить захват изображений вблизи выхлопной трубы транспортного средства, и обработку изображений с помощью подходящих алгоритмов обнаружения объектов для определения того, расположены ли потенциальные целевые объекты вблизи выхлопной трубы. В других примерах, если транспортное средство не оборудовано одной или более камерами, такой поиск может включать в себя обнаружение объектов вблизи выхлопной трубы посредством одного или более ультразвуковых датчиков (например, 185).
В данном примере временного интервала следует понимать, что в момент t1, в связи с наличием условий для регенерации ФТЧДД и определением того, что транспортное средство едет со скоростью ниже пороговой, посредством контроллера одной или более бортовым камерам может быть дана команда выполнить поиск объектов вблизи выхлопной трубы. Соответственно, в момент t2 потенциальные объекты обнаружены, на что указывает график 1515. Также следует понимать, что во время поиска посредством одной или более бортовых камер было установлено, что потенциальный объект может быть подходящим объектом для выполнения определения влажности окружающей среды. Поэтому может быть осуществлен процесс определения влажности, как подробно раскрыто выше на примерах ФИГ. 4-6. Как сказано выше, выполнение определения влажности окружающей среды может также зависеть от результата определения температуры окружающей среды. А именно, в примере, где может быть выполнен процесс регенерации ФТЧДД, может быть нужно измерить температуру окружающей среды как можно ближе к выхлопной трубе транспортного средства (например, рядом с ней), так как, в связи с работой двигателя, температура вблизи выхлопной трубы транспортного средства может быть существенно выше температуры дальше от транспортного средства. Эта повышенная температура также может влиять на локальную влажность в зоне вблизи выхлопной трубы транспортного средства, в связи с чем можно скорректировать порог расстояния, позволяющий выполнить процесс регенерации ФТЧДД. А именно, исследуемая зона при выполнении процесса регенерации ФТЧДД может включать в себя зону между выхлопной трубой транспортного средства и целевым объектом, причем данная зона может быть подвержена воздействию высоких температур, что может повлиять на локальную влажность в этой зоне. Локальные перепады влажности могут, в свою очередь, повлиять на теплопроводность воздуха в указанной зоне, как раскрыто выше на примерах ФИГ. 10-11, поэтому определение температуры и влажности, характерных для этой зоны, позволяет скорректировать порог расстояния для обеспечения возможности выполнения процесса регенерации ФТЧДД.
В момент t3 указано, что процесс определения влажности завершен, и влажность окружающей среды определена. Как раскрыто выше и на примерах ФИГ. 10-11, от процентной влажности может зависеть теплопроводность воздуха. Поэтому наличие сведений о температуре окружающей среды позволяет скорректировать порог расстояния для выполнения или невыполнения процесса регенерации ФТЧДД. Соответственно, в момент t3 может быть скорректирован порог расстояния. А именно, может быть задан порог расстояния на уровне первого порога, обозначенного линией 1526. В таком примере, если объект расположен относительно выхлопной трубы на расстоянии ближе указанного порога, регенерация ФТЧДД может не быть выполнена (например, ее выполнение может не быть допущено) и может быть отсрочена. При этом, если объект расположен относительно выхлопной трубы на расстоянии больше указанного порога, процесс регенерации ФТЧДД может быть выполнен. В данном примере временного интервала, порог расстояния может быть скорректирован в зависимости от результатов определения влажности и температуры, причем температура может соответствовать температуре по существу вблизи окрестности выхлопной трубы, причем влажность может соответствовать локальной влажности в окрестности выхлопной трубы (например, приблизительно между выхлопной трубой и целевым объектом). А именно, порог расстояния может быть скорректирован с уровня первого порога, обозначенного линией 1526, до уровня второго порога расстояния, обозначенного графиком 1527.
После коррекции порога расстояния в момент t3, между моментами t3 и t4 может быть определено расстояние до целевого объекта от выхлопной трубы транспортного средства с помощью ультразвукового датчика (например, 185). Для улучшения рабочего диапазона ультразвукового датчика, порог определения расстояния можно скорректировать в зависимости от результатов определения влажности и температуры, как подробно раскрыто выше на шаге 1155 на ФИГ. 11 и шаге 1230 на ФИГ. 12. Измерение расстояния может быть выполнено между моментами t3 и t4 посредством ультразвукового датчика, таким образом, в момент t4 может быть определено положение объекта. Поскольку порог расстояния был скорректирован до второго порога расстояния, обозначенного линией 1527, и поскольку определено, что объект расположен на расстоянии больше скорректированного порога расстояния, может быть выполнен процесс регенерации ФТЧДД. Соответственно, в момент t4 запускают регенерацию ФТЧДД, на что указывает график 1530.
Как сказано выше, регенерация ФТЧДД может включать в себя регулирование параметров работы двигателя для повышения температуры ФТЧДД. В число примеров могут входить: эксплуатация нагревателя (например, 75), соединенного с ФТЧДД, повышение температуры отработавших газов двигателя за счет работы на богатой смеси или непосредственного впрыска топлива в отработавшие газы.
Между моментами t4 и t5 может быть выполнена регенерация ФТЧДД. Хотя это и не показано явным образом, следует понимать, что во время процесса регенерации ФТЧДД можно продолжить использование одной или более бортовых камер и ультразвукового датчика (датчиков) для определения того, произошло ли перемещение объекта в зону ближе скорректированного порогового расстояния. В подобном случае, если будет определено, что объект находится ближе, чем на скорректированном пороговом расстоянии, событие регенерации можно прекратить и, в некоторых примерах, отсрочить.
Кроме того, между моментами t4 и t5, когда происходит процесс регенерации ФТЧДД, можно контролировать скопление сажи, например, по перепаду давления на ФТЧДД. Если перепад давления снизится до заранее заданного порогового перепада давления, процесс регенерации ФТЧДД можно завершить. Соответственно, в момент t5 следует понимать, что ФТЧДД был регенерирован. Соответственно, процесс регенерации ФТЧДД прекращают, на что указывает график 1530, так как условия для регенерации ФТЧДД теперь отсутствуют, на что указывает график 1505. Кроме того, можно прекратить операции по обнаружению объектов, так как больше не нужно определять, расположен ли какой-либо объект вблизи выхлопной трубы транспортного средства, на что указывает график 1515.
Между моментами t5 и t6 скорость транспортного средства возрастает, так как транспортное средство возобновляет работу в обычном режиме езды.
Так можно определять результат измерения относительной влажности посредством ультразвукового датчика, расположенного по периметру автотранспортного средства, причем ультразвуковой датчик выбирают из множества ультразвуковых датчиков. Таким образом, можно применить только тот ультразвуковой датчик, который может обеспечить надежные измерения относительной влажности с необходимой точностью, что позволяет продлить срок службы множества ультразвуковых датчиков, расположенных по периметру транспортного средства. Возможность выборочного применения того или иного ультразвукового датчика для измерений влажности может обеспечить преимущество в условиях, когда нужна регенерация фильтра твердых частиц дизельного двигателя, состоящее в возможности коррекции предела расстояния между объектом и выхлопной трубой транспортного средства в зависимости от результата оценки относительной влажности.
Технический эффект состоит в выявлении того, что в транспортном средстве с множеством ультразвуковых датчиков в некоторых состояниях применение одного ультразвукового датчика может быть предпочтительным по сравнению с применением других ультразвуковых датчиков при выполнении определения относительной влажности. Выбор предпочтительного ультразвукового датчика можно выполнять путем определения целевых объектов вблизи транспортного средства посредством одной или более бортовых камер, выполненных с возможностью обнаружения и определения потенциального целевого объекта (объектов). Выявив целевой объект, можно выбрать предпочтительный ультразвуковой датчик и выполнить измерение относительной влажности. Выполнение оценок относительной влажности таким образом позволяет улучшить точность и надежность результатов определения относительной влажности. Улучшение точности и надежности результатов оценки относительной влажности посредством ультразвукового датчика позволяет улучшить параметры работы транспортного средства, зависящие от наличия точных сведений об относительной влажности.
На основе систем, раскрытых в настоящем описании и на примерах ФИГ. 1-2 и ФИГ. 8, а также способов, раскрытых в настоящем описании и на примерах ФИГ. 4-7, ФИГ. 9 и ФИГ. 11-12, можно создать одну или более систем и один или более способов. В одном примере способ содержит шаги, на которых: выбирают один из множества датчиков, расположенных по периметру автотранспортного средства; передают множество сигналов от выбранного датчика, каждый на разной частоте; принимают отраженные сигналы переданных сигналов; определяют значения затухания только для каждого из отраженных сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема; определяют разности между парами значений затухания; и преобразуют разности в показатель относительной влажности. В первом примере способ отличается тем, что выбранный датчик выбирают на основании того, что на траектории передачи выбранного датчика находится неподвижный объект. Второй пример способа необязательно включает в себя первый пример и отличается тем, что выбранный датчик выбирают на основании того, что в пределах траектории передачи выбранного датчика находится целевое транспортное средство, причем целевое транспортное средство едет со скоростью, по существу равной скорости указанного автотранспортного средства, а также на по существу постоянном расстоянии от указанного автотранспортного средства. Третий пример способа необязательно включает в себя первый и/или второй примеры и дополнительно содержит шаги, на которых: осуществляют регенерацию фильтра твердых частиц, соединенного с низом кузова автотранспортного средства, путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего горячие газы выходят из задней части автотранспортного средства; выбирают выбранный датчик на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории горячих газов, выходящих из задней части автотранспортного средства; и отсрочивают или прерывают регенерацию в связи с наличием объекта в пределах заранее заданного расстояния от горячих газов, выходящих из задней части автотранспортного средства. Четвертый пример способа необязательно включает в себя любой один, или более, или все примеры с первого по третий и дополнительно содержит шаги, на которых: измеряют температуру воздуха вблизи места выхода горячих газов из задней части автотранспортного средства; определяют теплопроводность воздуха по меньшей мере частично по результатам определения относительной влажности и температуры воздуха; и корректируют порог расстояния для процесса регенерации, причем коррекция порога расстояния включает в себя уменьшение порога расстояния при уменьшении теплопроводности, и увеличение порога расстояния при увеличении теплопроводности. Пятый пример способа необязательно включает в себя любой один, или более, или все примеры с первого по четвертый и дополнительно содержит шаг, на котором: выполняют процесс регенерации без определения того, находится ли какой-либо объект в пределах заранее заданного расстояния от горячих газов, выходящих из задней части автотранспортного средства, если будет определено, что скорость транспортного средства превышает заранее заданный порог скорости. Шестой пример способа необязательно включает в себя любой один, или более, или все примеры с первого по пятый и дополнительно содержит шаг, на котором сравнивают амплитуду отраженного сигнала с опорной амплитудой, зависящей от расстояния до объекта, от которого происходит отражение сигнала, и параметров окружающей среды, в том числе, помимо прочих, влажности или температуры, для определения того, нужна ли очистка датчика. Седьмой пример способа необязательно включает в себя любой один, или более, или все примеры с первого по шестой и отличается тем, что выбор одного из множества датчиков, расположенных по периметру автотранспортного средства, частично зависит от того, нужна ли очистка какого-либо датчика из множества датчиков. Восьмой пример способа необязательно включает в себя любой один, или более, или все примеры с первого по седьмой и отличается тем, что передаваемые сигналы представляют собой звуковые волны, причем указанный один датчик представляет собой ультразвуковой датчик. Девятый пример способа необязательно включает в себя любой один, или более, или все примеры с первого по восьмой и отличается тем, что выбор одного из множества датчиков для определения относительной влажности происходит в связи с по меньшей мере одним из следующих событий: изменение температуры окружающей среды больше порога температуры окружающей среды, изменение давления окружающей среды больше порога давления окружающей среды, превышение порогового времени работы двигателя, и превышение порогового расстояния пробега транспортного средства.
Еще один пример способа содержит шаги, на которых: выбирают один из множества датчиков, расположенных по периметру автотранспортного средства, частично на основе одного или более изображений от одной или более камер, расположенных по периметру автотранспортного средства; передают множество сигналов от выбранного датчика, каждый на разной частоте; принимают отраженные сигналы переданных сигналов; определяют значения затухания только для каждого из отраженных сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема; определяют разности между парами значений затухания; и преобразуют разности в показатель относительной влажности. В первом примере способ отличается тем, что выбранный датчик выбирают на основе того, что объект, выявленный одной из камер, расположен в пределах траектории передачи выбранного датчика. Второй пример способа необязательно включает в себя первый пример и отличается тем, что объект является неподвижным. Третий пример способа необязательно включает в себя первый и/или второй примеры и отличается тем, что перемещение объекта происходит со скоростью, по существу равной скорости автотранспортного средства, а также на по существу постоянном расстоянии от указанного автотранспортного средства. Четвертый пример способа необязательно включает в себя любой один, или более, или все примеры с первого по третий и дополнительно содержит шаги, на которых: осуществляют регенерацию фильтра твердых частиц, соединенного с низом кузова автотранспортного средства, путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего горячие газы выходят из задней части автотранспортного средства; выбирают выбранный датчик на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории горячих газов, выходящих из задней части автотранспортного средства, а также того, что объект расположен в пределах траектории передачи выбранного датчика по результатам выявления одной из камер; и отсрочивают или прерывают регенерацию в связи с наличием объекта в пределах порогового расстояния от горячих газов, выходящих из задней части автотранспортного средства, причем пороговое расстояние корректируют в зависимости от результата измерения теплопроводности воздуха. Пятый пример способа необязательно включает в себя любой один, или более, или все примеры с первого по четвертый и отличается тем, что теплопроводность воздуха определяют по результатам определения относительной влажности и температуры воздуха, при этом температуру воздуха измеряют вблизи выхода горячих газов из задней части автотранспортного средства; причем коррекция порогового расстояния в зависимости от результата измерения теплопроводности воздуха включает в себя уменьшение порога расстояния при уменьшении теплопроводности и увеличение порога расстояния при увеличении теплопроводности. Шестой пример способа необязательно включает в себя любой один, или более, или все примеры с первого по пятый и дополнительно содержит шаги, на которых: выполняют процесс регенерации, если объект расположен на расстоянии, большем порогового; контролируют объект и зону вблизи задней части транспортного средства посредством одной или более камер во время процесса регенерации; и прекращают процесс регенерации, если во время процесса регенерации будет выявлено, что данный или другой объект расположен на расстоянии, меньшем порогового.
Система для транспортного средства содержит: один или более ультразвуковых датчиков, расположенных в разных точках на транспортном средстве; датчик температуры наружного воздуха; и контроллер с инструкциями, сохраненными в долговременной памяти, причем предусмотрена возможность, при исполнении указанных инструкций, осуществления контроллером следующих действий: выбор одного из ультразвуковых датчиков, расположенных в разных точках на транспортном средстве; измерение температуры наружного воздуха; выдачу команды ультразвуковому датчику на передачу и прием множества ультразвуковых сигналов одного ультразвукового датчика; определение сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема; определение значений затухания для тех сигналов, которые имеют одно и то же время прохождения с момента передачи до момента приема; определение разностей между парами значений затухания; и преобразование разностей в показатель относительной влажности с помощью функции преобразования. В первом примере система также содержит одну или более камер, расположенных в разных точках на транспортном средстве и выполненных с возможностью получения изображений вблизи транспортного средства; причем контроллер дополнительно содержит инструкции, сохраненные в долговременной памяти, причем предусмотрена возможность, при исполнении указанных инструкций, осуществления контроллером следующих действий: выявление объектов, неподвижных относительно транспортного средства; и выбор ультразвукового в соответствии с определением того, что объект находится в пределах траектории передачи выбранного датчика. Второй пример системы необязательно включает в себя первый пример и дополнительно содержит фильтр твердых частиц дизельного двигателя, соединенный с низом кузова транспортного средства, при этом предусмотрена возможность регенерации фильтра твердых частиц дизельного двигателя путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего есть возможность выхода горячих газов из задней части транспортного средства; причем контроллер дополнительно содержит инструкции, сохраненные в долговременной памяти, причем предусмотрена возможность, при исполнении указанных инструкций, осуществления контроллером следующих действий: выбор ультразвукового датчика в соответствии с определением того, что траектория передачи ультразвукового датчика перекрывает по меньшей мере часть траектории горячих газов, выходящих из задней части транспортного средства; определение теплопроводности воздуха в зависимости от показателя относительной влажности и результата измерения температуры воздуха; коррекцию порогового расстояния расположения объекта или объектов относительно горячих газов, выходящих из задней части транспортного средства, причем регенерацию фильтра твердых частиц выполняют только в том случае, если будет определено, что объект или объекты расположены на расстоянии, превышающем скорректированное пороговое расстояние; причем коррекция порогового расстояния основана на результате измерения теплопроводности воздуха и включает в себя уменьшение порогового расстояния при уменьшении теплопроводности и увеличение порогового расстояния при увеличении теплопроводности.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящем описании способы и алгоритмы управления можно хранить в виде исполняемых инструкций в долговременной памяти и могут реализовываться системой управления, содержащей контроллер, во взаимодействии с различными датчиками, исполнительными механизмами и другими техническими средствами системы двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия реализуют путем выполнения инструкций, содержащихся в системе, содержащей вышеупомянутые технические средства в составе двигателя, взаимодействующие с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ ВЛАЖНОСТИ И СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2713812C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ТВЕРДЫХ ЧАСТИЦ В ОТРАБОТАВШИХ ГАЗАХ | 2017 |
|
RU2686351C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТВЕРДЫХ ЧАСТИЦ | 2016 |
|
RU2704929C2 |
| Способ и система для обнаружения твердых частиц в отработавших газах | 2017 |
|
RU2673645C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ РАБОТЫ ДВИГАТЕЛЯ В ЗАВИСИМОСТИ ОТ МЕТЕОДАННЫХ | 2017 |
|
RU2674545C2 |
| Способ обеспечения измерения влажности | 2016 |
|
RU2689227C2 |
| СПОСОБ РЕГЕНЕРАЦИИ ФИЛЬТРА ТВЁРДЫХ ЧАСТИЦ ВЫПУСКНОЙ СИСТЕМЫ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2017 |
|
RU2741531C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВПРЫСКА ВОДЫ В ДВИГАТЕЛЬ | 2017 |
|
RU2693282C2 |
| СПОСОБ ЗАПРАВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2714215C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ФИЛЬТРА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2717575C2 |






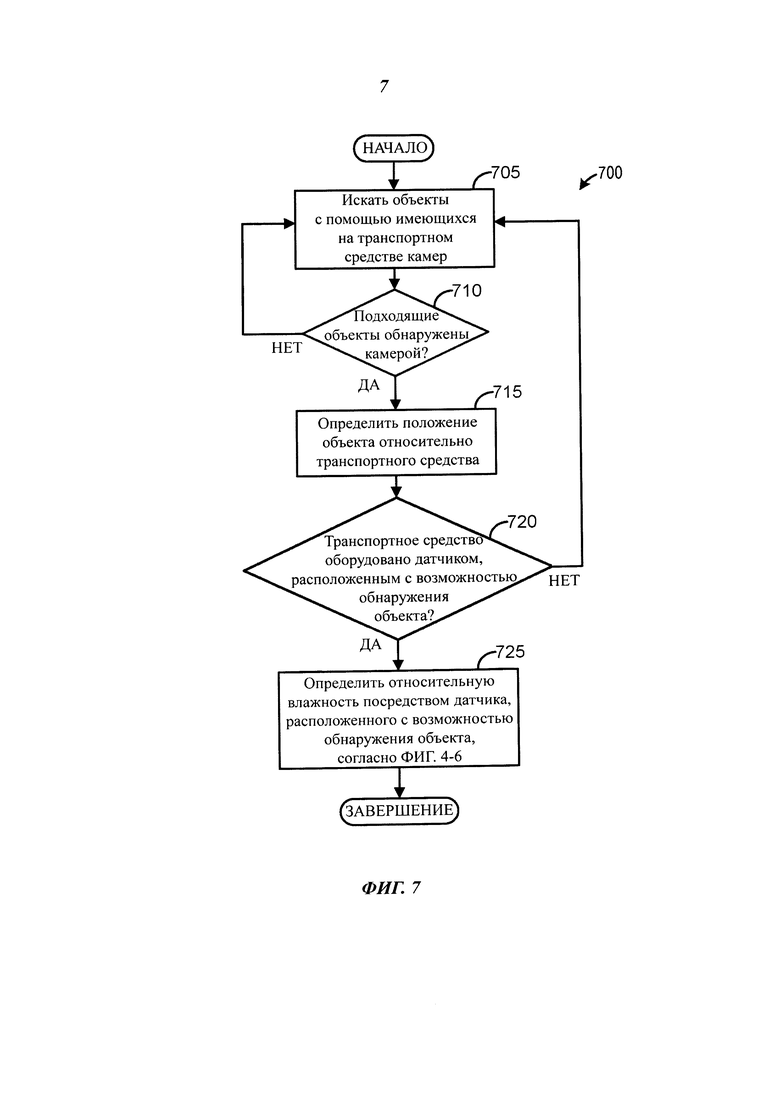

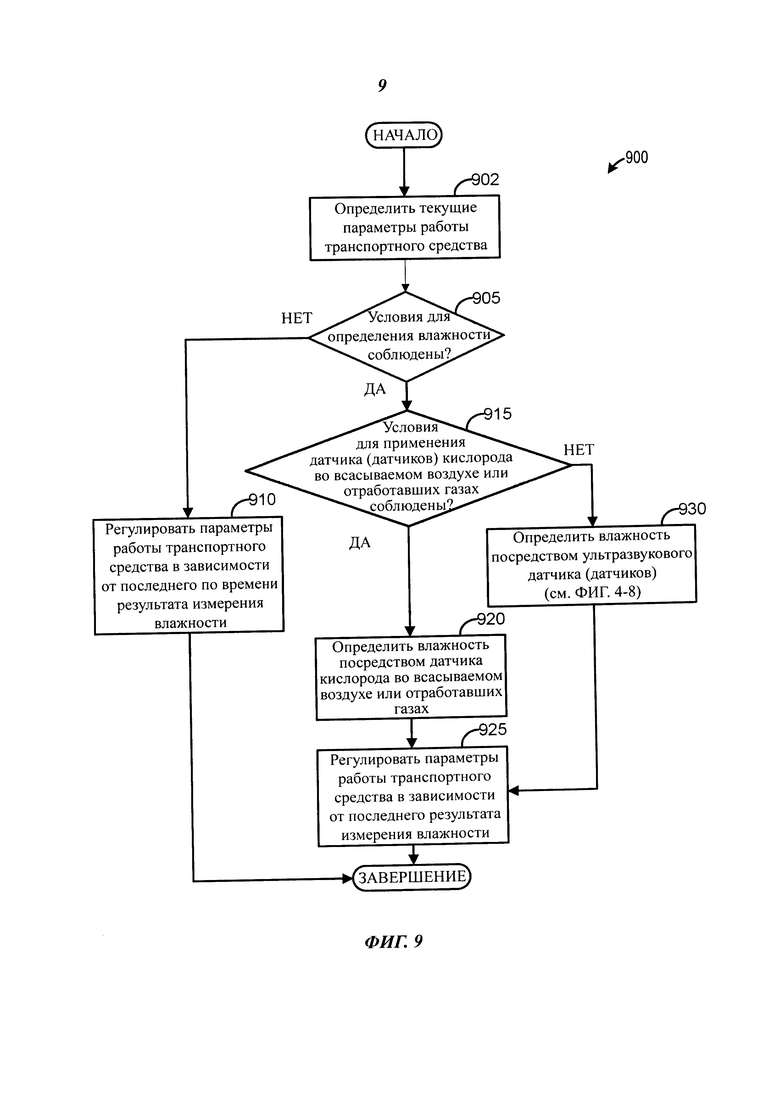






Предложен способ определения влажности. Выбирают один из множества датчиков, расположенных по периметру автотранспортного средства на основании того, что на траектории передачи выбранного датчика находится неподвижный относительно автотранспортного средства объект. Передают множество сигналов от выбранного датчика, каждый на разной частоте. Принимают отраженные сигналы переданных сигналов. Определяют значения затухания только тех отраженных сигналов, которые имеют одно и то же время прохождения с момента передачи до момента приема. Определяют разности между парами значений затухания. Преобразуют разности в показатель относительной влажности. Предложены также способ определения влажности и система определения влажности. Достигается определение относительной влажности. 3 н. и 16 з.п. ф-лы, 17 ил. 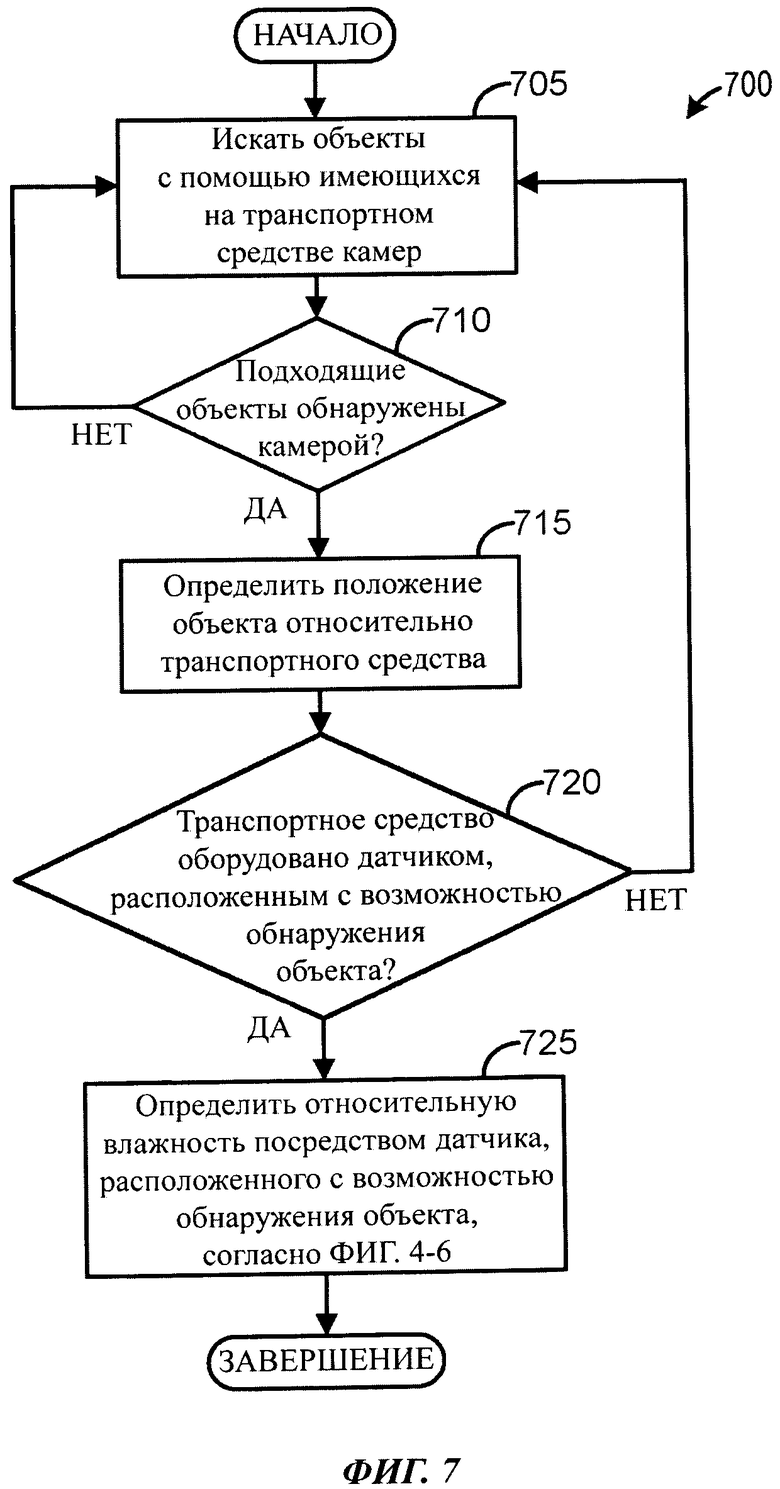
1. Способ определения влажности, содержащий шаги, на которых:
выбирают один из множества датчиков, расположенных по периметру автотранспортного средства на основании того, что на траектории передачи выбранного датчика находится неподвижный относительно автотранспортного средства объект;
передают множество сигналов от выбранного датчика, каждый на разной частоте;
принимают отраженные сигналы переданных сигналов;
определяют значения затухания только тех отраженных сигналов, которые имеют одно и то же время прохождения с момента передачи до момента приема;
определяют разности между парами значений затухания; и
преобразуют разности в показатель относительной влажности.
2. Способ по п. 1, отличающийся тем, что выбранный датчик выбирают на основании того, что в пределах траектории передачи выбранного датчика находится целевое транспортное средство, причем целевое транспортное средство едет со скоростью, по существу равной скорости указанного автотранспортного средства, а также на по существу постоянном расстоянии от указанного автотранспортного средства.
3. Способ по п. 1, дополнительно содержащий шаги, на которых:
осуществляют регенерацию фильтра твердых частиц, соединенного с низом кузова автотранспортного средства, путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего газы выходят из задней части автотранспортного средства;
выбирают выбранный датчик на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории газов, выходящих из задней части автотранспортного средства; и
отсрочивают или прерывают регенерацию в связи с наличием объекта в пределах заранее заданного расстояния от газов, выходящих из задней части автотранспортного средства.
4. Способ по п. 3, дополнительно содержащий шаги, на которых:
измеряют температуру воздуха вблизи места выхода газов из задней части автотранспортного средства;
определяют теплопроводность воздуха по меньшей мере частично по показателю относительной влажности и температуре воздуха; и
корректируют порог расстояния для процесса регенерации, причем коррекция порога расстояния включает в себя уменьшение порога расстояния при уменьшении теплопроводности и увеличение порога расстояния при увеличении теплопроводности.
5. Способ по п. 3, дополнительно содержащий шаг, на котором:
выполняют процесс регенерации без определения того, находится ли объект в пределах заранее заданного расстояния от газов, выходящих из задней части автотранспортного средства, если будет определено, что скорость автотранспортного средства превышает заранее заданный порог скорости.
6. Способ по п. 1, дополнительно содержащий шаг, на котором:
сравнивают амплитуду отраженных сигналов с опорной амплитудой, зависящей от расстояния до неподвижного объекта, от которого происходит отражение сигнала, и параметров окружающей среды, в том числе, помимо прочих, влажности или температуры, для определения того, нужна ли очистка выбранного датчика.
7. Способ по п. 6, отличающийся тем, что выбор одного из множества датчиков, расположенных по периметру автотранспортного средства, частично зависит от того, нужна ли очистка какого-либо датчика из множества датчиков.
8. Способ по п. 1, отличающийся тем, что передаваемые сигналы представляют собой звуковые волны, причем указанный выбранный датчик представляет собой ультразвуковой датчик.
9. Способ по п. 1, отличающийся тем, что выбор одного из множества датчиков для определения относительной влажности происходит в связи с по меньшей мере одним из следующих событий: изменение температуры окружающей среды больше порога температуры окружающей среды, изменение давления окружающей среды больше порога давления окружающей среды, превышение порогового времени работы двигателя и превышение порогового расстояния пробега транспортного средства.
10. Способ определения влажности, содержащий шаги, на которых:
выбирают один из множества датчиков, расположенных по периметру автотранспортного средства, частично на основе одного или более изображений от одной или более камер, расположенных по периметру автотранспортного средства;
передают множество сигналов от выбранного датчика, каждый на разной частоте;
принимают отраженные сигналы переданных сигналов;
определяют значения затухания только тех отраженных сигналов, которые имеют одно и то же время прохождения с момента передачи до момента приема;
определяют разности между парами значений затухания; и
преобразуют разности в показатель относительной влажности.
11. Способ по п. 10, отличающийся тем, что выбранный датчик выбирают на основе того, что объект, выявленный одной из камер, расположен в пределах траектории передачи выбранного датчика.
12. Способ по п. 11, отличающийся тем, что объект является неподвижным.
13. Способ по п. 11, отличающийся тем, что перемещение объекта происходит со скоростью, по существу равной скорости автотранспортного средства, а также на по существу постоянном расстоянии от указанного автотранспортного средства.
14. Способ по п. 11, дополнительно содержащий шаги, на которых:
осуществляют регенерацию фильтра твердых частиц, соединенного с низом кузова автотранспортного средства, путем сжигания твердых частиц, скопившихся в фильтре твердых частиц, в результате чего газы выходят из задней части автотранспортного средства;
выбирают выбранный датчик на основании того, что траектория передачи выбранного датчика перекрывает по меньшей мере часть траектории газов, выходящих из задней части автотранспортного средства, а также того, что объект расположен в пределах траектории передачи выбранного датчика по результатам выявления одной из камер; и
отсрочивают или прерывают регенерацию в связи с наличием объекта в пределах порогового расстояния от газов, выходящих из задней части автотранспортного средства, причем пороговое расстояние корректируют в зависимости от результата измерения теплопроводности воздуха.
15. Способ по п. 14, отличающийся тем, что теплопроводность воздуха определяют по показателям относительной влажности и температуры воздуха, при этом температуру воздуха измеряют вблизи выхода газов из задней части автотранспортного средства; и причем коррекция порогового расстояния в зависимости от результата измерения теплопроводности воздуха включает в себя уменьшение порогового расстояния при уменьшении теплопроводности и увеличение порогового расстояния при увеличении теплопроводности.
16. Способ по п. 14, дополнительно содержащий шаги, на которых:
выполняют регенерацию, если объект расположен на расстоянии, большем порогового;
контролируют объект и зону вблизи задней части транспортного средства посредством одной или более камер во время регенерации; и
прекращают регенерацию, если во время регенерации будет выявлено, что данный или другой объект расположен на расстоянии, меньшем порогового.
17. Система определения влажности, содержащая:
один или более ультразвуковых датчиков, расположенных в разных точках на транспортном средстве;
датчик температуры наружного воздуха; и
контроллер с инструкциями, сохраненными в долговременной памяти, причем предусмотрена возможность, при исполнении указанных инструкций, осуществления контроллером следующих действий:
выбор одного из ультразвуковых датчиков, расположенных в разных точках на транспортном средстве на основании того, что на траектории передачи выбранного ультразвукового датчика находится некоторый объект;
измерение температуры наружного воздуха;
выдачу команды выбранному ультразвуковому датчику на передачу и прием множества ультразвуковых сигналов выбранного ультразвукового датчика;
определение сигналов, имеющих одно и то же время прохождения с момента передачи до момента приема;
определение значений затухания для тех сигналов, которые имеют одно и то же время прохождения с момента передачи до момента приема;
определение разностей между парами значений затухания; и
преобразование разностей в показатель относительной влажности с помощью функции преобразования.
18. Система по п. 17, дополнительно содержащая:
одну или более камер, расположенных в разных точках на транспортном средстве и выполненных с возможностью получения изображений вблизи транспортного средства;
причем контроллер дополнительно содержит инструкции, сохраненные в долговременной памяти, причем предусмотрена возможность, при исполнении указанных инструкций, осуществления контроллером следующих действий:
выявление объекта, находящегося на траектории передачи выбранного ультразвукового датчика, посредством одной или более камер, причем объект дополнительно определен как неподвижный относительно транспортного средства.
19. Система по п. 17, дополнительно содержащая:
фильтр твердых частиц дизельного двигателя, соединенный с низом кузова транспортного средства, при этом предусмотрена возможность регенерации фильтра твердых частиц дизельного двигателя путем сжигания твердых частиц, скопившихся в фильтре твердых частиц дизельного двигателя, в результате чего есть возможность выхода газов из задней части транспортного средства;
причем контроллер дополнительно содержит инструкции, сохраненные в долговременной памяти, причем предусмотрена возможность, при исполнении указанных инструкций, осуществления контроллером следующих действий:
выбор ультразвукового датчика дополнительно в соответствии с определением того, что траектория передачи выбранного ультразвукового датчика перекрывает по меньшей мере часть траектории газов, выходящих из задней части транспортного средства;
определение теплопроводности воздуха в зависимости от показателя относительной влажности и результата измерения температуры воздуха;
коррекцию порогового расстояния расположения объекта относительно газов, выходящих из задней части транспортного средства, причем регенерацию фильтра твердых частиц дизельного двигателя выполняют только в том случае, если будет определено, что объект расположен на расстоянии, превышающем скорректированное пороговое расстояние; и
причем коррекция порогового расстояния основана на результате определения теплопроводности воздуха и включает в себя уменьшение порогового расстояния при уменьшении теплопроводности и увеличение порогового расстояния при увеличении теплопроводности.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

