Перекрестная ссылка на родственную заявку
[0001] Данная заявка притязает на приоритет и преимущества американской предварительной заявки на патент №62/476,756, озаглавленный "Soft Robot System and Method for Interacting with the Human", поданной 25 марта 2017, которая полностью содержится в данном документе по ссылке в своей полноте.
Уровень техники
[0002] Предмет изобретения, раскрытый в данном документе, в общем, относится к области парков развлечений. Более конкретно, варианты осуществления настоящего раскрытия связаны с системами и способами, используемыми, чтобы предоставлять впечатления парка развлечений с интерактивным оборудованием.
[0003] Были созданы различные развлекательные дорожки и выставки, чтобы предоставлять пользователям уникальную интерактивность, двигательные и визуальные впечатления. На различных дорожках и выставках впечатления пользователей могут улучшаться путем использования определенных интерактивных компонентов в пределах дорожек и выставок. Тем не менее, различные механические устройства, которые приводят в действие эти интерактивные компоненты, могут зачастую проявляться как перемещающиеся с линейным, более механическим или предварительно запрограммированном характером, что оставляет у пользователя ощущение взаимодействия с роботом, как противоположность "более живому" объекту. Помимо этого, традиционные интерактивные компоненты зачастую ограничиваются в отношении касания или взаимодействия с собой или другими объектами, вследствие механических сил (например, от столкновений), которые могут возникнуть в результате таких взаимодействий. Теперь следует признать, что желательно предоставлять интерактивные компоненты, которые предоставляют "более живые" и динамические интерактивные впечатления.
Краткое описание изобретения
[0004] Некоторые варианты осуществления, сопоставимые в рамках настоящего раскрытия, резюмируются ниже. Эти варианты осуществления не имеют намерение ограничивать рамки раскрытия, а, скорее, эти варианты осуществления имеют намерение предоставлять краткое описание возможных форм настоящих вариантов осуществления. В действительности, настоящие варианты осуществления могут охватывать множество форм, которые могут быть аналогичны или отличаться от вариантов осуществления, изложенных ниже.
[0005] В одном варианте осуществления, аттракцион парка развлечений включает в себя признак аттракциона. Признак аттракциона включает в себя привод текучей среды (гидропневмопривод), имеющий накачиваемую массу, накачиваемая масса соединена с возможностью обмена текучей средой с источником текучей среды под давлением, чтобы предоставлять накачивание накачиваемой массы. Одно или более устройств управления текучей средой выполнены с возможностью регулировать накачивание накачиваемой массы, и один или более датчиков выполнены с возможностью отслеживать характеристики состояния привода текучей среды. Контроллер функционально соединяется с одним или более устройствами управления текучей средой и одним или более датчиками. Контроллер выполнен с возможностью управляемо накачивать накачиваемую массу, по меньшей мере, на основе обратной связи от одного или более датчиков, чтобы инструктировать приводу текучей среды толкать объект, и контроллер выполнен с возможностью управлять накачиванием накачиваемой массы, чтобы регулировать один или более параметров привода текучей среды, чтобы поддерживать силу, прикладываемую посредством привода текучей среды к объекту в предварительно определенном диапазоне.
[0006] В другом варианте осуществления, способ работы признака аттракциона парка развлечений включает в себя накачивание привода текучей среды признака аттракциона, чтобы перемещать признак аттракциона вдоль профиля движения, чтобы инструктировать взаимодействие между признаком аттракциона и целью. Взаимодействие включает в себя физический контакт между признаком аттракциона и целью. Способ также включает в себя сбор информации, касающейся взаимодействия между признаком аттракциона и целью с использованием одного или более датчиков при возникновении взаимодействия, и анализ через контроллер, связанный с одним или более датчиками, собранной информации от одного или более датчиков, чтобы определять параметр взаимодействия, ассоциированный со взаимодействием. Способ дополнительно включает в себя регулирование накачивания привода текучей среды при возникновении взаимодействия, чтобы поддерживать параметр взаимодействия в целевом диапазоне.
[0007] В другом варианте осуществления, пневматическая роботизированная система включает в себя признак аттракциона, имеющий множество приводов текучей среды, сконфигурированных, чтобы предоставлять форму и профиль движения признака аттракциона в ответ на управляемое накачивание. Источник текучей среды соединен с возможностью обмена текучей средой с признаком аттракциона и выполнен с возможностью предоставлять текучую среду под давлением во множество приводов текучей среды. Одно или более устройств управления текучей средой пневматической роботизированной системы выполнены с возможностью управлять текучей средой под давлением, вытекающей из источника текучей среды во множество приводов текучей среды, и один или более датчиков, ассоциированных с признаком аттракциона, выполнены с возможностью отслеживания характеристик состояния множества приводов текучей среды. Контроллер функционально соединяется с одним или более устройствами управления текучей средой и с одним или более датчиками. Контроллер выполнен с возможностью анализировать обратную связь от одного или более датчиков, связанных со взаимодействием между признаком аттракциона и целью при возникновении взаимодействия, чтобы определять один или более параметров взаимодействия, ассоциированных со взаимодействием, при этом взаимодействие между признаком аттракциона и целью включает в себя физический контакт между признаком аттракциона и целью. Контроллер также выполнен с возможностью регулировать накачивание, по меньшей мере, одного из множества приводов текучей среды, чтобы поддерживать один или более параметров взаимодействия в предварительно определенном диапазоне при возникновении взаимодействия.
Краткое описание чертежей
[0008] Эти и другие признаки, аспекты и преимущества настоящего раскрытия сущности должны становиться более понятными после прочтения нижеприведенного подробного описания со ссылками на прилагаемые чертежи, при этом аналогичные номера ссылок представляют аналогичные части на всех чертежах, на которых:
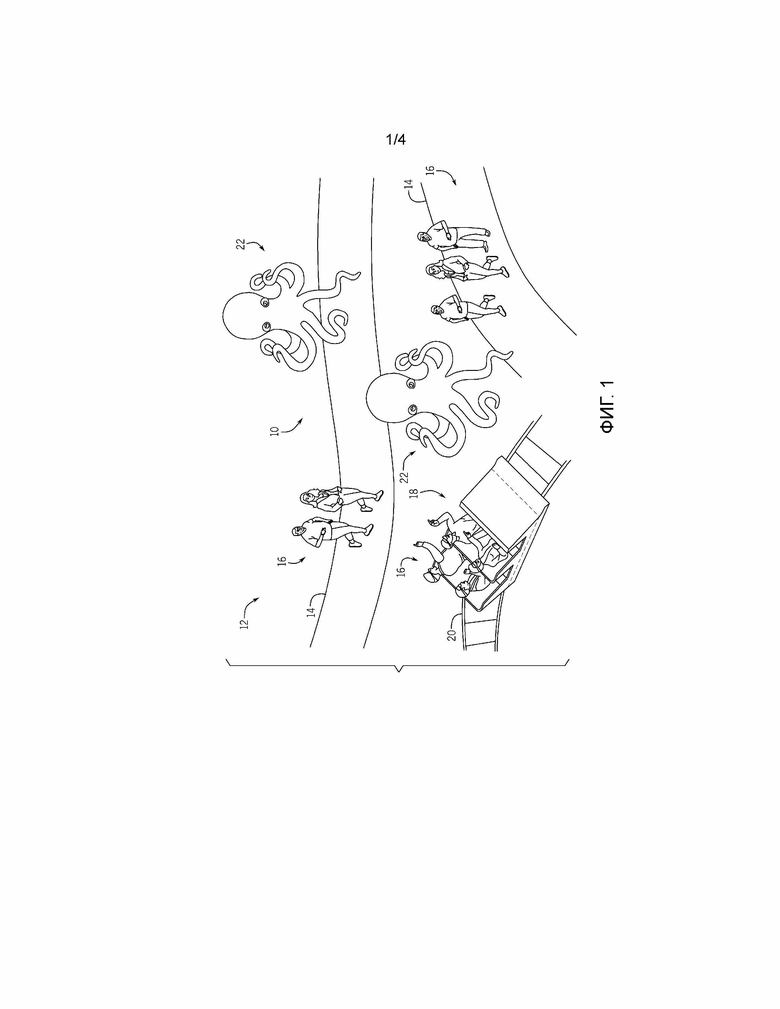
[0009] Фиг. 1 является видом в перспективе варианта осуществления пневматической роботизированной системы, которая улучшает впечатление гостей в парке развлечений, в соответствии с настоящими вариантами осуществления;
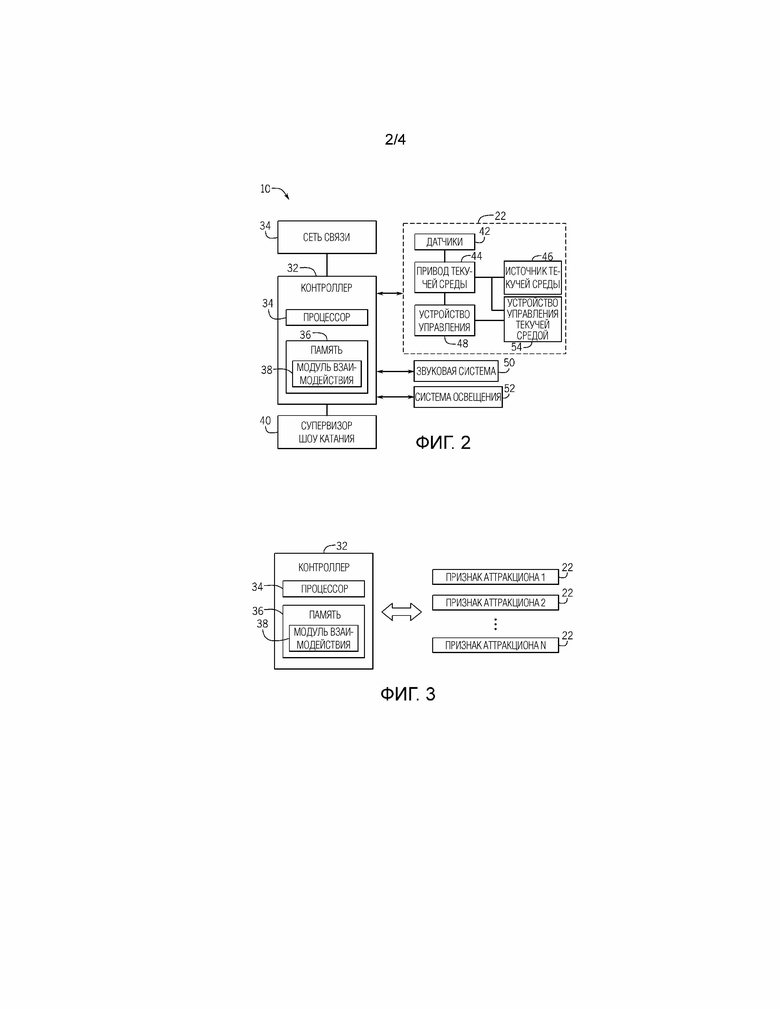
[0010] Фиг. 2 является блок–схемой варианта осуществления пневматической роботизированной системы по фиг. 1, в соответствии с настоящими вариантами осуществления;
[0011] Фиг. 3 является блок–схемой другого варианта осуществления пневматической роботизированной системы по фиг. 1, в соответствии с настоящими вариантами осуществления;
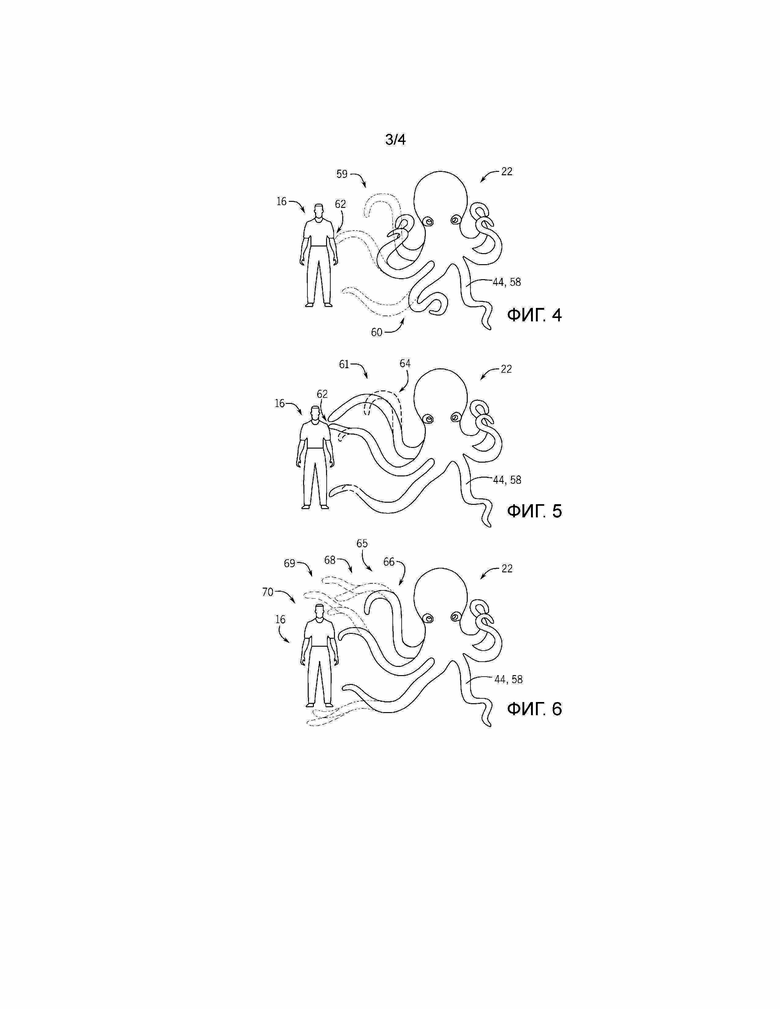
[0012] Фиг. 4 является схематичной иллюстрацией примера впечатления взаимодействия между целью и признаком аттракциона пневматической роботизированной системы по фиг. 1, в соответствии с настоящими вариантами осуществления;
[0013] Фиг. 5 является схематичной иллюстрацией другого примера впечатления взаимодействия между целью и признаком аттракциона пневматической роботизированной системы по фиг. 1, в соответствии с настоящими вариантами осуществления;
[0014] Фиг. 6 является схематичной иллюстрацией другого примера впечатления взаимодействия между целью и признаком аттракциона пневматической роботизированной системы по фиг. 1, в соответствии с настоящими вариантами осуществления; и
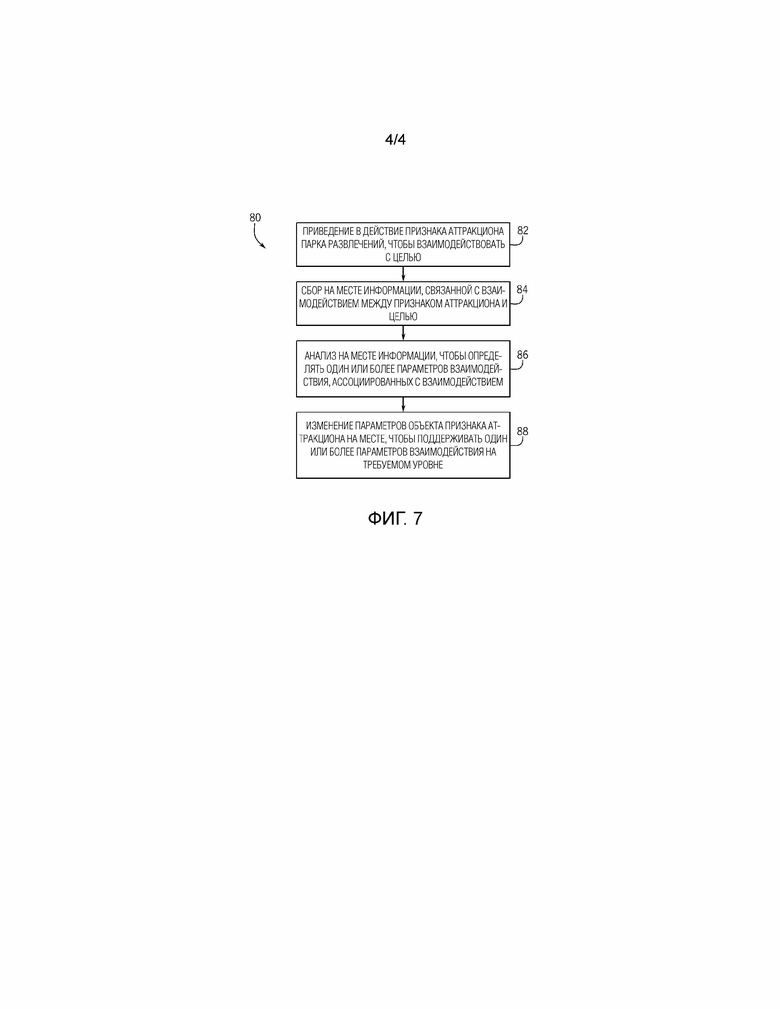
[0015] Фиг. 7 является блок–схемой последовательности операций способа, иллюстрирующей вариант осуществления процесса для работы пневматической роботизированной системой по фиг. 1, в соответствии с настоящими вариантами осуществления.
Подробное описание изобретения
[0016] Один или более конкретных вариантов осуществления настоящего изобретения будут описаны ниже. С целью предоставления точного описания этих вариантов осуществления, все признаки фактической реализации могут не описываться в подробном описании. Следует принимать во внимание, что при работе в ходе таких фактических реализаций, как и в любом инженерном или расчетном проекте, должно приниматься множество конкретных для реализации решений с тем, чтобы достигать конкретных целей разработчиков, таких как совместимость с системно–ориентированными и бизнес–ориентированными ограничениями, которые могут варьироваться между реализациями. Кроме того, следует принимать во внимание, что такие опытно–конструкторские работы могут быть комплексными и длительными, однако должны быть стандартной процедурой расчета, изготовления и производства для специалистов в данной области техники с использованием преимущества этого раскрытия сущности.
[0017] С учетом вышеизложенного, пневматическая роботизированная технология может использоваться, чтобы создавать механические устройства, которые перемещаются в более текучей и более "живой" манере, которая улучшает впечатление пользователя в различных интерактивных и визуальных впечатлениях. Кроме того, пневматическая роботизированная технология предоставляет возможность для людей (например, гостей) взаимодействовать с анимационными персонажами или признаками аттракциона (например, машины, роботы) комфортным и интерактивным способом, поскольку они достигают своих форм и перемещений путем направления текучей среды (например, газа и/или жидкости) через складной или накачиваемый материал (например, кожух). Таким образом такие роботы могут упоминаться как "мягкие роботы". При использовании здесь, пневматическая роботизированная технология (например, пневматические роботы) могут включать в себя баллонообразные или накачиваемые признаки аттракциона, которые принимают текучую среду, чтобы формировать различимую форму. Такие признаки зачастую упоминаются в качестве "приводов" робота, поскольку они отвечают, по меньшей мере, за фрагмент перемещения робота. Помимо этого, пневматическая роботизированная технология может включать в себя направляющие текучую среду механизмы (например, насосы, клапаны, полости или их комбинацию) внутри и/или присоединенные с возможностью обмена текучей средой к накачиваемым признакам аттракциона, которые могут регулировать, чтобы инструктировать накачиваемым признакам аттракциона перемещаться в определенных направлениях или по шаблонам (например, вдоль путей движения). Таким образом, пневматическая роботизированная технология может использоваться, чтобы формировать различные формы, корпуса, структуры и другие формирования. Помимо этого, способность управляемо накачивать признаки аттракциона или пневматические роботы означает, что можно управлять соответствием внешних поверхностей признаков аттракциона, чтобы поддерживать определенный уровень взаимодействий между признаками аттракциона и гостем (например, комфортное взаимодействие).
[0018] В то время как настоящие варианты осуществления могут реализоваться во множестве настроек, примерные настройки, при которых пневматическая роботизированная система 10 используется в парке 12 развлечений, схематично показана на фиг. 1. Как проиллюстрировано, парк 12 развлечений может включать в себя переходные мостики 14 для гостей 16 парка 12 развлечений, тематические аттракционы и другие аттракционы парка развлечений, такие как дорожка 18 (например, включающая в себя транспортное средство для катания, конфигурированное, чтобы удерживать пассажиров). Дорожка 18 может быть выполнена с возможностью размещать гостей 16 парка 12 развлечений и перемещаться по пути 20 транспортного средства. Пневматическая роботизированная система 10 может включать в себя один или более признаков 22 аттракциона (например, пневматические роботы, машины), которые могут быть выполнены с возможностью взаимодействовать с объектами (например, гостями 16, фрагментами транспортного средства для катания, другими персонажами парка развлечений, реквизитом и т.д.), чтобы улучшать впечатление гостей 16. Например, когда гость 16 идет по переходным мостикам 14, один или более признаков 22 аттракциона могут перемещаться, чтобы появляться "как живые" и/или могут касаться гостя 16, чтобы предоставлять самопроизвольное "живое" взаимодействие с гостем 16. В конкретных вариантах осуществления, один или более признаков 22 аттракциона могут взаимодействовать с гостями 16 на дорожке 18. В конкретных вариантах осуществления, один или более признаков 22 аттракциона могут взаимодействовать друг с другом или с любыми другими подходящими объектами в парке 12 развлечений.
[0019] Фиг. 2 является блок–схемой различных компонентов пневматической роботизированной системы 10. В проиллюстрированном варианте осуществления, пневматическая роботизированная система 10 может включать в себя сеть 30 связи (например, сеть проводной и/или беспроводной связи, к примеру, WLAN, WWAN и NFC), контроллер 32 и признак 22 аттракциона. Сеть 30 связи может соединять с возможностью обмена данными различные компоненты пневматической роботизированной системы 10 друг с другом и/или соединять с возможностью обмена данными пневматическую роботизированную систему 10 с другими системами парка 12 развлечений (например, облакам, сервером данных, дорожкой 18, супервизором шоу катания). Контроллер 32 может включать в себя процессор 34 (например, процессор общего назначения, система–на–кристалле (SoC), специализированная интегральная схема (ASIC) или некоторая другая аналогичная конфигурация процессора), функционально соединенный с памятью 36 (например, материальный энергонезависимый машиночитаемый носитель и/или другое устройство хранения), чтобы выполнять инструкции для работы признака 22 аттракциона. Память 36 может хранить модуль 38 взаимодействия, сконфигурированный, чтобы анализировать и/или определять взаимодействия пневматической роботизированной системы 10 с гостем (гостями) 16. В конкретных вариантах осуществления, контроллер 32 может соединяться с возможностью обмена данными (например, через сеть 30 связи) с супервизором 40 шоу катания, чтобы координировать работу признака 22 аттракциона с работой других аттракционов парка развлечений, такими как дорожка 18 и система эффектов шоу (например, проекционные устройства и/или устройства отображения, системы освещения, звуковые системы и т.д, чтобы предоставлять эффекты шоу гостям 16). В соответствии с настоящими вариантами осуществления, супервизор 40 шоу катания может включать в себя соответствующие процессоры (например, процессор общего назначения, система–на–кристалле (SoC), специализированная интегральная схема (ASIC) или некоторая другая аналогичная конфигурация процессора) и память (например, материальный энергонезависимый машиночитаемый носитель и/или другое устройство хранения), чтобы выполнять инструкции, сконфигурированные, чтобы координировать работу признака 22 аттракциона с другими фрагментами аттракциона. В то время как иллюстрируются отдельные признаки в этом варианте осуществления, в других вариантах осуществления, весь или фрагмент контроллера 32 и супервизора 40 шоу катания могут реализовываться на одном и том же элементе аппаратных средств или оборудовании, и/или могут включать в себя аналогичное или идентичное программирование (например, для избыточности).
[0020] Признак 22 аттракциона может включать в себя или быть ассоциирован с одним или более датчиками 42, приводом 44 текучей среды, источником 46 текучей среды, устройством 48 управления (например, программируемый логический контроллер (PLC)), звуковой системой 50 и системой 52 освещения. Один или более датчиков 42 могут включать в себя один или более датчиков силы, датчиков давления, камеры, датчиков свойства текучей среды, датчиков температуры или их комбинацию, расположенных на различных подходящих местоположениях признака 22 аттракциона. Один или более датчиков 42 могут располагаться на внешней поверхности и/или внутренней поверхности признака 22 аттракциона. Один или более датчиков 42 могут быть выполнены с возможностью собирать информацию, связанную с движением и/или взаимодействием признака 22 аттракциона с объектом (объектами) или человеком (людьми).
[0021] Привод 44 текучей среды может быть соединен с возможностью обмена текучей средой с источником 46 текучей среды и включает в себя один или более накачиваемых признаков (например, одна или более накачиваемых масс), форма и движение которых имеют возможность управляться путем изменения внутреннего давления текучей среды признака. Такие накачиваемые массы могут включать в себя баллонообразные материалы, имеющие упругие свойства (например, эластомеры), или могут включать в себя более жесткие материалы, имеющие предварительно заданную форму, когда достигнуто пороговое давление накачивания (например, жесткий материал не растягивается посредством значительной величины). В качестве примера, такие материалы могут включать в себя синтетические ткани (например, полиамидные ткани, полиарамидные ткани, полиэфирные ткани), шелк, полотно и т.д.
[0022] Привод 44 текучей среды может включать в себя или соединяться с любыми подходящими механизмами направления текучей среды (например, устройствами 54 управления текучей средой), в том числе подходящими насосами, клапанами, трубами, трубопроводами и т.д., чтобы изменять или поддерживать профиль движения (например, в том числе путь движения и/или скорость перемещения) привода 44 текучей среды. Такие устройства 54 управления текучей средой могут, дополнительно или альтернативно, быть частью или соединенными с возможностью обмена текучей средой с источником 46 текучей среды. В конкретных вариантах осуществления, источник 46 текучей среды может быть источником текучей среды под давлением. В соответствии с настоящими вариантами осуществления, устройства 54 управления текучей средой могут давать возможность накачивания и откачивания приводов 44 текучей среды. Например, устройства 54 управления текучей средой могут быть выполнены с возможностью давать возможность текучей среде протекать в приводы 44 текучей среды и из приводов 44 текучей среды. Конкретные варианты осуществления признака аттракциона могут включать в себя устройства 54 управления текучей средой, которые дают возможность текучей среде протекать между отдельными приводами 44 текучей среды.
[0023] Текучая среда может быть направлена на любые подходящие фрагменты в признаке 22 аттракциона, чтобы изменять или поддерживать форму и профиль движения признака 22 аттракциона. Таким образом, модель приводов 44 текучей среды признака 22 аттракциона определяет общую форму признака 22 аттракциона. Таким образом, регулирование накачивания приводов 44 текучей среды изменяет форму признака 22 аттракциона и, в конкретных вариантах осуществления, перемещение признака 22 аттракциона. Устройство 48 управления (например, с собственным предварительно запрограммированным профилем движения), как отмечено выше, может включать в себя программируемый логический контроллер (PLC) или другие подходящие устройства управления, чтобы управлять работой привода 44 текучей среды, источником 46 текучей среды и т.д. Например, устройство 48 управления может принимать инструкции из контроллера 32 и на основе инструкций устройство 48 управления может управлять операциями привода 44 текучей среды (устройства 54 управления текучей средой) согласно предварительно запрограммированному профилю движения (или согласно профилю движения, заданному или модифицированному посредством модуля 38 взаимодействия или другому сохраненному набору инструкций контроллера 32), чтобы приводить в действие признак 22 аттракциона. Фактически, в конкретных вариантах осуществления, контроллер 32 и/или устройство 48 управления может реализовывать все или часть системы воспроизведения анимации, где контроллер 32 и/или устройство 48 управления инструктировать признаку 22 аттракциона перемещаться согласно предварительно запрограммированному набору путей движения. Эта система воспроизведения анимации может соответственно включать в себя множество сохраненных профилей движения для приводов 44 текучей среды признака 22 аттракциона, и любой один или комбинация этих сохраненных профилей движения могут модифицироваться, чтобы поддерживать определенный уровень взаимодействия (например, поддерживать силу, переданную из приводов 44 текучей среды в объект) в пределах определенного предварительно заданного диапазона. Дополнительно, пока иллюстрируется как отдельный признак в этом варианте осуществления, в других вариантах осуществления, все или фрагмент устройства 48 управления, контроллер 32, супервизор 40 шоу катания или любая комбинация вышеозначенного, могут реализовываться на идентичном элементе аппаратных средств или оборудовании, и/или могут включать в себя совместно используемое, перекрывающееся, похожее или идентичное программирование (например, для избыточности).
[0024] Звуковая система 50 может включать в себя один или более аудиопреобразователей. Например, звуковая система 50 может включать в себя микрофоны, динамики, усилители динамика, устройства воспроизведения аудио или другие подходящие аудиоустройства. Система 52 освещения может включать в себя одно или более устройств освещения или световых эффектов (например, управляемый через стандартный протокол, такой как цифровое мультиплексирование (DMX)). Работа этих систем может управляться с помощью контроллера 32. Например, контроллер 32 может управлять операциями звуковой системы 50 и системы 52 освещения, чтобы координировать звуковые и/или световые эффекты с профилем движения признака 22 аттракциона. Различные компоненты признака 22 аттракциона могут быть соединены с возможностью обмена данными друг с другом и/или соединены с контроллером 32 напрямую или через сеть 30 связи. Контроллер 32 может управлять профилем движения признака 22 аттракциона, чтобы взаимодействовать с (например, касанием) одной или более целями (например, гостем 16, самим признаком 22 аттракциона или любыми другими подходящими объектами). Контроллер 32 может анализировать информацию, связанную с взаимодействием (например, информацию, собранную посредством одного или более датчиков 42) и профилем движения признака 22 аттракциона на месте, чтобы определять и/или изменять профиль движения при взаимодействии с одной или более целями.
[0025] В некоторых вариантах осуществления, как проиллюстрировано на фиг. 3, контроллер 32 может соединяться с возможностью обмена данными с несколькими признаками 22 аттракциона. Контроллер 32 может управлять операциями нескольких признаков 22 аттракциона, чтобы изменять и/или поддерживать профили движения нескольких признаков 22 аттракциона. Контроллер 32 может управлять операциями нескольких признаков 22 аттракциона, чтобы взаимодействовать друг с другом и/или с одной или более целями. Следует отметить, что в случаях, когда несколько признаков 22 аттракциона взаимодействуют с целью (например, гостем 16, подходящим объектом, признаком аттракциона), контроллер 32 может координировать и/или управлять взаимодействиями на основе сетевого параметра взаимодействия (например, сетевой силы, сетевого давления, сетевого количества движения), полученный от всех признаков 22 аттракциона в физическом контакте с целью. Например, контроллер 32 может изменять профили движения нескольких признаков 22 аттракциона, чтобы поддерживать сетевой параметр взаимодействия на требуемом уровне (например, в требуемом диапазоне).
[0026] В конкретных вариантах осуществления настоящего раскрытия, пневматическая роботизированная система 10 может использоваться, чтобы давать возможность одному или более признакам 22 аттракциона касаться других признаков 22 аттракциона, взаимодействовать с (например, касанием) различными частями его собственной структуры, объектами окружения (например, дорожками и оборудованием шоу) и т.п. Пневматическая роботизированная система 10 может выполнять управляемые, повторяющиеся перемещения, которые могут приводить к толчкам (например, намеренным и непреднамеренным) при поддержании управляемой сетевой механической силы, доставляемой к цели ниже конкретного уровня (например, уровня, который дает возможность взаимодействия, не повреждая целостность соответствующей структуры или частей). Дополнительно, в отличие от традиционных анимированных признаков, которые часто не позволяют взаимодействовать с пользователями–людьми (например, не допускают возможных столкновений и/или многообразия режимов отказа), признаки 22 аттракциона (например, пневматические роботы) согласно настоящему раскрытию могут проектироваться и управляться, чтобы работать с использованием предварительно заданного диапазона силы при взаимодействии с пользователями–людьми (например, гостем 16), тем самым улучшая впечатление гостя. В качестве примера, в одном варианте осуществления, признак 22 аттракциона может управляться, чтобы динамически изменять силу толчка, переданную человеку (гостю 16 парка 12 развлечений).
[0027] В соответствии с настоящими вариантами осуществления, признак 22 аттракциона может быть сконфигурирован, чтобы позволять гостю 16 взаимодействовать с признаком 22 аттракциона и влиять на профиль движения (например, включающий в себя путь движения и/или скорость перемещения) привода 44 текучей среды. В состоянии сбоя профиля движения, может быть желательным для привода 44 текучей среды быть податливым для гостя 16 при толчке, чтобы обеспечивать комфорт (или иное ощущение) гостя 16. Например, контроллер 32 может отправлять инструкции в устройство 48 управления, которое управляет, в свою очередь, накачиванием или откачиванием привода 44 текучей среды (например, определенного фрагмента привода 44 текучей среды).
[0028] В конкретных вариантах осуществления и в качестве неограничивающего примера, пневматическая роботизированная система 10 может включать в себя один или более признаков 22 аттракциона, который включает в себя накачиваемую массу (соответствующую одному или более приводам 44 текучей среды), которая, после накачивания, формирует предварительно заданную форму, чтобы сформировать анимированную фигуру или профиль движения анимированной фигуры. Например, множество приводов 44 текучей среды каждого из признаков 22 аттракциона может соответствовать форме анимированной фигуры и/или профилю движения анимированной фигуры. В качестве примера, первый набор приводов 44 текучей среды может использоваться, чтобы образовывать форму, соответствующую анимированной фигуре, в то время как второй набор приводов 44 текучей среды (который может включать в себя то же самое, отличающийся или совместно используемый поднабор приводов текучей среды по сравнению с первым набором) может использоваться для перемещения анимированной фигуры вдоль конкретного профиля движения. Таким образом, управляемое накачивание первых приводов 44 текучей среды может управлять конструктивной целостностью анимированной фигуры, в то время как управляемое накачивание вторых приводов текучей среды может управлять профилем движения анимированной фигуры. Одна или обе стратегии могут использоваться, чтобы управлять взаимодействиями между признаком 22 аттракциона и гостем 16 или другим целевым признаком.
[0029] В качестве примера управляемого накачивания (который также предназначается, чтобы обозначать управляемое откачивание, при необходимости), каждый из одного или более признаков 22 аттракциона включает в себя одно или более соответствующих устройств 54 управления текучей средой, которые управляют текучей средой под давлением, введенной из источника 46 текучей среды, чтобы накачивать или откачивать фрагменты признака 22 аттракциона. Устройства 54 управления текучей средой могут включать в себя один или более клапанов и/или насосов, которые управляются через устройство 48 управления, чтобы накачивать или откачивать приводы 44 текучей среды до заданного давления и с управляемым темпом. Чтобы предоставлять управление накачиванием или откачиванием и в конечном счете управлять взаимодействием признака 22 аттракциона с человеком, каждый из одного или более признаков 22 аттракциона может быть соединен с возможностью обмена данными с контроллером 32. Контроллер 32 соединен с возможностью обмена данными с соответствующим устройством 48 управления (например, PLC) для каждого признака 22 аттракциона и в конкретных вариантах осуществления с одним или более датчиками 42, используемыми для отслеживания состояния признака 22 аттракциона непрерывным способом в реальном времени. В качестве примера, давление приводов 44 текучей среды признаков 22 аттракциона может отслеживаться с использованием одного или более датчиков 42, включающих в себя один или более датчиков давления, расположенных в предварительно определенных местоположениях на или внутри одного или более приводов 44 текучей среды. В качестве другого примера, один или более приводов 44 текучей среды могут отслеживаться с использованием одной или более камер, используемых в качестве датчиков 42, где камеры используются в сочетании с ассоциированным вычислительным устройством с программированием машинного зрения. В качестве дополнительного примера, система динамического отслеживания отношения "сигнал–шум" может иметь систему камер, надлежащим образом запрограммированную компьютерную систему отслеживания и ассоциированные излучатели и/или детекторы, чтобы использовать отражательные технологии отслеживания. Дополнительно или альтернативно, система камер и надлежащим образом запрограммированная компьютерная система отслеживания могут использовать технологии отслеживания на основе картографирования поверхности.
[0030] Контроллер (например, контроллер 32), ассоциированный с реализациями машинного зрения может выполнять отслеживание в реальном времени внешних поверхностей одного или более признаков 22 аттракциона и может использовать такое отслеживание, чтобы предоставлять вводы в алгоритмические структуры (например, систему уравнений, такую как модель, ассоциированную с модулем 38 взаимодействия), запрограммированные на контроллере 32. Аналогично, контроллер 32, ассоциированный с одним или более датчиками 42 (например, датчиками давления или другими датчиками свойств текучей среды), может выполнять отслеживание в реальном времени различных давлений одного или более признаков 22 аттракциона и может использовать одно или более отслеживаемых давлений в качестве ввода в алгоритмы. Таким образом, текущая раскрытая пневматическая роботизированная система 10 выполняет активное отслеживание и регулирование одного или более признаков 22 аттракциона, чтобы предоставлять управляемые физические взаимодействия с человеком (например, гостем 16).
[0031] В соответствии с настоящими вариантами осуществления, контроллер 32, как раскрыто в данном документе, может представлять ведущий контроллер или систему управления, соединенные с возможностью обмена данными с контроллером (например, устройством 48 управления, ассоциированным с каждым признаком 22 аттракциона), или может представлять конкретный контроллер, который ассоциирован с каждым признаком 22 аттракциона. В качестве примера, парк 12 развлечений может включать в себя главную систему управления (например, контроллер 32), и каждый привод 44 текучей среды может управляться посредством отдельного контроллера (например, устройства 48 управления) с собственным предварительно запрограммированным профилем движения.
[0032] Контроллер (например, контроллер 32) настоящего раскрытия может выполнять активное отслеживание и регулирование приводов 44 текучей среды одного или более признаков 22 аттракциона. В качестве примера, контроллер 32 может включать в себя специально запрограммированные аппаратные и/или программные компоненты, которые отслеживают характеристики состояния одного или более приводов 44 текучей среды и используют такие отслеживаемые характеристики в качестве вводов в систему уравнений (например, одна или более моделей модуля 38 взаимодействия), связанную с взаимодействиями между одним или более признаками 22 аттракциона, одним или более гостями 16, и/или другим объектом (объектами) или машиной (машинами). Контроллер 32 может непрерывно выполнять вычисления, чтобы определять степень, до которой определенные переменные, ассоциированные с каждым из приводов 44 текучей среды, должны обрабатываться, чтобы поддерживать силу толчка одного или более признаков 22 аттракциона на госте 16 в пределах предварительно определенного диапазона. В конкретных вариантах осуществления, определенные пороговые значения или предварительно определенные диапазоны, ассоциированные с максимально допустимой силой толчка (или другого параметра объекта), могут не быть заданным значением для всех позиций привода текучей среды вдоль его пути движения. Наоборот, пороговое значение или предварительно определенный диапазон для максимально допустимой силы могут быть функцией пути движения привода 44 текучей среды (или пути движения полного признака 22 аттракциона). Например, контроллер 32 может моделировать максимально допустимую силу толчка для данного привода 44 текучей среды (или целого признака 22 аттракциона) в качестве функции позиции привода 44 текучей среды (или целого признака 22 аттракциона) вдоль пути движения. Таким образом, контроллер 32 может определять первую допустимую силу толчка (например, предварительно определенный диапазон), когда привод 44 текучей среды находится в первой позиции вдоль пути движения. Тем не менее, контроллер 32 может определять вторую допустимую силу толчка, которая отличается от первой (например, отличающийся предварительно определенный диапазон), когда привод 44 текучей среды находится во второй позиции вдоль пути движения.
[0033] Система уравнений, используемая для таких определений, может включать в себя отслеживаемые переменные, а также переменные, которые зафиксированы на основе материалов одного или более признаков 22 аттракциона. В соответствии с конкретными вариантами осуществления, контроллер 32 может учитывать число характеристик, связанных с одним или более признаками 22 аттракциона, таких как динамические характеристики объекта (которые первоначально определены на основе идеального профиля движения как пояснено ниже), заданные характеристики материала объекта (которые зависят от материалов приводов 44 текучей среды признака аттракциона) и согласуемые характеристики объекта, которые являются характеристиками, которые могут быть обработаны для вычисления силы и регулирования в реальном времени.
[0034] Контроллер 32 может использовать одну или более математических функций, чтобы вычислять (например, через одну или более моделей) максимум (например, по принципу "наихудшего случая") силы толчка, переданного гостю 16 посредством признака 22 аттракциона (например, одного или более приводов 44 текучей среды), и может использовать любой один или комбинацию отслеживаемых и фиксированных характеристик в качестве вводов в функцию или функции. Контроллер 32 может также обрабатывать одну или более переменных, ассоциированных с признаком 22 аттракциона, чтобы динамически управлять максимальной силой толчка. Более конкретно, контроллер 32 отслеживает различные аспекты (например, внутреннее давление текучей среды), ассоциированные с каждым из одним или более приводами 44 текучей среды и, на основе этого отслеживания в реальном времени, в сочетании с различными другими вводами (например, в одну или более функций системы) выполняет вычисление в реальном времени максимальной или по принципу "наихудшего случая" силы толчка или диапазона силы (например, в качестве функции от позиции вдоль данного пути движения). На основе вывода в реальном времени этой силы (или диапазона силы) согласуемые характеристики объекта, ассоциированные с одним или более приводами 44 текучей среды, могут регулироваться, чтобы предоставлять возможность увеличения или уменьшения силы. В качестве одного примера, контроллер 32 может сначала снижать внутреннее давление одного или более приводов 44 текучей среды до достижения минимальных конструктивных требований давления (например, чтобы поддерживать форму анимированной фигуры) и затем снижать скорость и ускорение, ассоциированные с профилем движения признака 22 аттракциона.
[0035] В конкретных вариантах осуществления, контроллер 32 может вычислять значение для F(o), заданного в данном документе в качестве силы, прикладываемой к человеку (например, гостю 16 парка развлечений) посредством объекта (привода 44 текучей среды). Несколько объектов (например, приводы 44 текучей среды признака 22 аттракциона, гость 16) могут формировать систему, моделируемую посредством контроллера 32. Контроллер 32 может вычислять/оценивать силу, прикладываемую на основе одного или более допущений, связанных с моделируемой системой. Например, контроллер 32 может допускать, что, максимальная сила, прикладываемая посредством одного или более приводов 44 текучей среды к гостю 16, является пропорциональной количеству движения объектов, вовлеченных в контакт и собственной частоты объектов.
Помимо этого, контроллер 32 может допускать, что в точке толчка, неподрессоренная масса приводов 44 текучей среды снижает длительность толчка, что снижает максимальную силу толчка.
[0036] В вычисляемом F(o), контроллер 32 может учитывать динамические характеристики объекта приводов 44 текучей среды признака 22 аттракциона, которые получаются в результате "идеального" профиля движения признака 22 аттракциона, который спроектирован, чтобы иметь требуемый эффект (например, требуемый путь перемещения, и требуемый момент времени для этого перемещения). На основе идеального профиля движения, известно какая требуемая координата (например, X, Y и Z) позиции должна быть для приводов 44 текучей среды в любой момент времени. Скорость от времени, смещение от времени, ускорение от времени или любая их комбинация приводов 44 текучей среды может быть установлена согласно требуемым позициям и моменту времени, в зависимости от способа, которым оборудование рассчитано функционировать (например, требуемый эффект приводов 44 текучей среды). В качестве одного примера, идеальный профиль движения может быть установлен в контроллере 32 во время фазы предварительного программирования, чтобы задавать базис относительно того, как оборудование спроектировано, чтобы функционировать. Контроллер 32 может использовать этот базис, чтобы вычислять начальные значения для F(o). Динамические характеристики объекта могут включать в себя, в качестве примера, X(t) = смещение как функция от времени, В(x, t) = скорость как функция от позиции и времени, A(x,t) = ускорение как функция от позиции и времени, P(o) = внешнее/атмосферное внешнее давление, площадь поверхности, допустимый максимум (например, по принципу "наихудшего случая") контактной жесткости, плотность текучей среды, используемой для накачивания (которая может быть заданным значением или может регулироваться, если существует более чем один источник накачиваемой текучей среды), или любая их производная, или интегральная функция, или любая их комбинация.
[0037] Контроллер 32 может также учитывать набор свойств материала объекта, или непосредственно в качестве постоянного входного значения, или в качестве фактора, влияющего на переменную, используемую в вычисляемом/оцениваемом F(o). Таким образом, контроллер 32 может учитывать материал приводов 44 текучей среды, который в конечном счете контактирует с человеком. Такой набор свойств материала объекта может включать в себя E(m) = модуль Юнга материала, а также прочность на разрыв материала.
[0038] Контроллер 32 может обрабатывать определенные переменные в системе, чтобы влиять на максимальную силу (силу толчка по принципу "наихудшего случая"), прикладываемую к гостю 16 или другому объекту (например, машине). Например, контроллер 32 может обрабатывать согласуемые характеристики объекта приводов 44 текучей среды, которые являются характеристиками, обрабатываемыми для вычисления F(max), и регулированиями в реальном времени системой на основе F(max). Как пояснено в данном документе, F(max) может быть задан как произведение скорости в точке толчка умноженной на квадратный корень произведения полной массы в точке контакта и контактной жесткости контактирующих поверхностей, как указано в следующем уравнении:
F(max) = V(impact) ∗ √(M(total) ∗ контактная жесткость). (1)
[0039] В настоящее время признается, что факторы, отмеченные выше в уравнении (1), V(impact) и M(total) являются переменными, которые могут обрабатываться, чтобы влиять на F(max). С типичным машинным оборудованием, M(total) не может считаться переменной, которая может обрабатываться. Более конкретно, масса входящих в контакт объектов типично не подвержена изменениям. Тем не менее, в соответствии с настоящими вариантами осуществления, может быть возможным регулировать контактную массу посредством регулирований давлений, ассоциированных с приводами 44 текучей среды.
[0040] Таким образом, в соответствии с конкретными вариантами осуществления, контроллер 32 может обрабатывать контактную массу пропорционально относительно вычисленного F(max) и/или требуемого F(max) путем обработки давления, ассоциированного с приводами 44 текучей среды. Например, контроллер 32 может обрабатывать ΔP, который является разностью давлений через объект (привод 44 текучей среды) и/или P(i), который является средним внутренним давлением объекта.
[0041] В конкретных вариантах осуществления, контроллер 32 может также выполнять подвычисления, связанные с массой объекта (например, привод 44 текучей среды) M(o), которая, как отмечено выше, является компонентом полной массы (M(total)) во время контакта (контактная масса). Такие подвычисления могут выполняться в качестве части большей последовательности вычислений, связанных с определением F(max). Например, с согласуемым объектом, таким как признак 22 аттракциона, текучая среда (например, неподрессоренная масса), приводимая в действие посредством привода 44 текучей среды, снижается во время толчка. Снижение неподрессоренной массы может быть подвычислением, выполненным посредством контроллера 32. Другое вычисление (например, подвычисление), выполненное посредством контроллера 32, связанное с массой объекта (например, привод 44 текучей среды), может включать в себя момент инерции массы объекта, который связан с распределением массы объекта (например, относительно конкретного направления или оси).
[0042] В то время как контроллер 32 может делать регулировки давления в приводах 44 текучей среды, контроллер 32 может ограничивать такие регулировки давления на основе определенных соображений. Например, контроллер 32 может учитывать минимальное давление, требуемое для конструктивной целостности признака 22 аттракциона путем ограничения изменения максимального давления минимальным давлением (например, требуемый для техобслуживания профиля движения и конструктивная целостность признака 22 аттракциона). Таким образом, контроллер 32 может вносить изменения в давление привода 44 текучей среды, в тоже время позволяя приводу 44 текучей среды поддерживать достаточное внутреннее давление текучей среды, требуемое для конструктивной целостности.
[0043] Как изложено выше относительно уравнения (1), F(max) может зависеть от скорости в точке толчка (V(impact)), полной контактной массы и контактной жесткости. Таким образом, в дополнение к или вместо регулирования полной контактной массы в точке толчка, контроллер 32 может регулировать V(impact), чтобы управлять F(max). Поскольку скорость в точке толчка связана с профилем движения признака 22 аттракциона, контроллер 32 может непосредственно регулировать скорость признака 22 аттракциона, чтобы регулировать вычисленный/оцененный F(max) или может регулировать другие аспекты профиля движения признака 22 аттракциона, чтобы регулировать вычисленный/оцененный F(max). Тем не менее, может потребоваться только регулировать определенные фрагменты профиля движения так, что признак 22 аттракциона все еще выполняет его полную намеченную функцию (например, анимированная фигура все еще выполняет свой требуемый эффект).
[0044] В качестве простого примера одного привода 44 текучей среды, привод 44 текучей среды может перемещаться из состояния покоя (скорость по существу 0) в конечную скорость через определенный период времени, за который, по меньшей мере, фрагмент привода 44 текучей среды преодолевает определенную дистанцию (привод 44 текучей среды имеет V(x,t)). Другими словами, профиль движения имеет компонент ускорения и компонент скорости в точке толчка (A(impact)) и V(impact)). Вычисленная скорость привода 44 текучей среды может быть V(x,t), и V(impact) может управляться посредством контроллера 32, чтобы представлять уменьшение от V(x,t) путем регулирования ускорения по профилю движения. Например, контроллер 32 может регулировать темп накачивания привода 44 текучей среды (например, путем управления темпом, с которым текучей среде разрешается перемещаться из источника 46 текучей среды в соответствующий привод 44 текучей среды), чтобы регулировать V(impact). При регулировании скорости контроллер 32 может также по сути обрабатывать ускорение и позицию (в данное время). Любой интеграл или производная функций, связанных со скоростью, ускорением и смещением, могут использоваться для вычислений и обработок. Другими словами, контроллер 32 может обрабатывать профиль движения привода 44 текучей среды. Например, контроллер 32 может обрабатывать скорость во времени (увеличивать или уменьшать скорость в реальном времени), чтобы непрерывно вычислять какая сила толчка была бы на госте 16, и может выполнять дополнительные обработки надлежащим образом.
[0045] Привод 44 текучей среды (или признак 22 аттракциона) может не иметь никаких соединений или может иметь одно или более соединений, приводящих к определенному числу степеней свободы. В таких вариантах осуществления, уравнение для полной силы системы (F(total)), которая является функцией F(o), изменяется на основе числа соединений и степеней свободы перемещения привода 44 текучей среды, а также того, как соединения соединяются между собой. Другими словами, F(total) может также быть функцией числа соединений (N), числа степеней свободы D(N) и других факторов. Поскольку способ, которым эти соединения соединяются, может изменять полную площадь поверхности и натяжение по площади поверхности, контроллер 32 может интегрировать темп углубления по полной площади поверхности привода 44 текучей среды при определении F(total).
[0046] Контроллер 32 может обрабатывать аспекты привода 44 текучей среды, связанные с его профилем движения, или связанные с его массой, или их комбинацией. Таким образом, в соответствии с аспектом этого раскрытия, контроллер 32 может быть запрограммирован с возможностью принимать логическое решение относительно того, регулировать ли массу привода 44 текучей среды (при толчке) или его скорость/ускорение (или другой компонент профиля движения). Решение может быть предварительно установленным определением, или контроллер 32 может использовать интеллектуальное принятие решений (например, через матрицу алгоритмов) относительно того, какой вариант использовать, чтобы уменьшать или иначе управлять силой толчка. Это функционирует, чтобы динамически изменять силу толчка на госте 16 так, что поддерживается комфорт гостя 16.
[0047] В качестве примера предварительно установленного определения, контроллер 32 может быть запрограммирован с возможностью сначала снижать давление, по меньшей мере, фрагмента привода 44 текучей среды, чтобы уменьшать силу толчка. Как только давление уменьшается до порогового значения (например, минимального давления, требуемого для конструктивной целостности привода 44 текучей среды), контроллер 32 может затем переключаться на регулирование скорости/ускорения привода 44 текучей среды. В качестве другого примера, функция определенного параметра привода 44 текучей среды (например, давление, сила, поверхностное натяжение) в качестве функции времени может вводиться в пневматическую роботизированную систему 10, и функция может предписывать допустимые изменения, внесенные в качестве функции времени. Контроллер 32 может затем осуществлять регулирование привода 44 текучей среды согласно этой функции.
[0048] Контроллер 32 может также быть запрограммирован с возможностью регулировать силу толчка согласно различным стандартам, чтобы поддерживать соответствие (например, согласно "пройдено/отклонено" или аналогичному критерию) с различными стандартами, устанавливаемыми для взаимодействий парка развлечений. В качестве примера, контроллер 32 может отслеживать и выполнять регулирования в реальном времени привода 44 текучей среды, чтобы поддерживать соответствие установленным нагрузкам G–силы ASTM, которые были приняты для применения на человеке или госте 16, например согласно ASTM F–24–2291. В качестве другого примера, контроллер 32 может отслеживать и выполнять регулирования в реальном времени привода 44 текучей среды, чтобы поддерживать соответствие установленным стандартам для конкретного оборудования, например, для целевого объекта или для материалов самого признака 22 аттракциона. Значения для F(total), F(max) и/или F(o) могут быть заданы на основе таких установленных стандартов.
[0049] Кроме того, в конкретных вариантах осуществления, привод 44 текучей среды может отслеживаться и управляться, чтобы поддерживать соответствие стандартам или некоторому требуемому эффекту, связанному с взаимодействиями с другими объектами (например, оборудованием парка развлечений). Например, привод 44 текучей среды может иметь путь движения, который инструктирует ему оказывать влияние на транспортное средство катания дорожки 18 (например, часть транспортного средства катания, перевозящее гостей 16), и контроллер 32 может отслеживать и регулировать аспекты, связанные с приводом 44 текучей среды признака 22 аттракциона, чтобы поддерживать контактную силу в требуемом диапазоне. С другой стороны, вышеприведенное пояснение может применяться к нескольким приводам 44 текучей среды, и их регулирования могут координироваться, чтобы получать программированный профиль движения, который соответствует требуемому профилю движения (например, "идеальному" профилю движения).
[0050] С учетом вышеизложенного, фиг. 4, 5 и 6 показывают схемы, иллюстрирующие пример взаимодействий признака 22 аттракциона с целевым объектом, показанным как один из гостей 16. Тем не менее, другие ситуации могут включать в себя взаимодействия с другим объектом, такими как другой признак 22 аттракциона, фрагмент самого признака 22 аттракциона и т.д. Помимо этого, для простоты, контроллер 32, источники 46 текучей среды, устройство 48 управления, датчики 42 и т.д., не показаны, но следует понимать, что они являются частью иллюстрированной системы.
[0051] В проиллюстрированном варианте осуществления на фиг. 4, признак 22 аттракциона (например, иллюстрируется как осьминог) может управляться посредством контроллера 32, чтобы перемещаться согласно профилю движения, который может регулироваться в реальном времени. Здесь, щупальца осьминога могут соответствовать одному или более приводам 44 текучей среды, и более конкретно каждый привод текучей среды может включать в себя накачиваемую массу 58, которая может варьироваться в форме на основе степени накачивания накачиваемой массы 58. Профиль движения признака 22 аттракциона (и отдельных приводов 44 текучей среды) может также варьироваться путем управления накачиванием и откачиванием накачиваемых масс 58.
[0052] На фиг. 4 признак 22 аттракциона имеет первый профиль 59 движения, такой, что, по меньшей мере, фрагмент признака 22 аттракциона (здесь, несколько приводов 44 текучей среды) может перемещаться из первой позиции 60 во вторую позицию 62 к гостю 16, чтобы контактировать или касаться гостя 16 во второй позиции 62. Контроллер 32 может быть выполнен с возможностью управлять одним или более параметрами взаимодействия, прикладываемыми к гостю 16, так, что один или более параметров взаимодействия находятся в соответствующем подходящем диапазоне, в то время как признак 22 аттракциона поддерживает свою требуемую форму. Один или более параметров взаимодействия могут включать в себя, но не ограничиваться этим, силу, давление, количество движения и соответствие признака 22 аттракциона (например, соответствие одного или более приводов 44 текучей среды).
[0053] В проиллюстрированном варианте осуществления на фиг. 5, признак 22 аттракциона может управляться посредством контроллера 32, чтобы откачиваться после контакта или касания гостя 16. Признак 22 аттракциона (например, один или более приводов 44 текучей среды) может откачиваться так, что один или более параметров взаимодействия находятся в пределах соответствующих пороговых значений. Например, признак 22 аттракциона может перемещаться согласно второму профилю 61 движения, так, что признак 22 аттракциона перемещается из первой позиции 62 (например, признак 22 аттракциона контактирует с гостем 16) в третью позицию 64 (например, признак 22 аттракциона не контактирует с гостем 16). В конкретных вариантах осуществления, признак 22 аттракциона может поддерживать контакт с гостем 16 и/или поддерживать требуемую форму, но признак 22 аттракциона может откачиваться так, что сила, давление, и/или количество движения, прикладываемые к гостю 16, находятся на требуемом уровне (например, в требуемых пороговых значениях).
[0054] В проиллюстрированном варианте осуществления на фиг. 6, признак 22 аттракциона может управляться посредством контроллера 32, чтобы изменять профиль движения до того, как признак 22 аттракциона контактирует с гостем 16, чтобы не допускать физического контакта. Например, признак 22 аттракциона может перемещаться согласно третьему профилю 65 движения из четвертой позиции 66 (например, признак 22 аттракциона не контактирует с целью 17) в пятую позицию 68 к гостю 16, так, что признак 22 аттракциона находится в непосредственной близости от гостя 16, но не контактирует с гостем 16 в пятой позиции 68. Затем, признак 22 аттракциона может перемещаться согласно четвертому профилю 69 движения, чтобы перемещаться из пятой позиции 68 в шестую позицию 70. При перемещении признака 22 аттракциона из пятой позиции 68 в шестую позицию 70, признак 22 аттракциона перемещается, чтобы обходить или втягиваться далеко от гостя 16, чтобы не допускать контакт с гостем 16, или управлять силами толчка, переданными от признака 22 аттракциона к гостю 16.
[0055] Фиг. 7 является блок–схемой последовательности операций способа варианта осуществления процесса 80, чтобы оперировать с признаком 22 аттракциона (например, мягким роботом, машиной) в соответствии с настоящими вариантами осуществления. Процесс 80 может реализовываться посредством пневматической роботизированной системы 10. Процесс 80 может представлять инициируемый код или инструкции, сохраняемые в энергонезависимом машиночитаемом носителе (например, памяти 36) и выполняемые, например, посредством процессора 34. Другими словами, процесс 80 выполняется, по меньшей мере, частично посредством контроллера 32 согласно алгоритмической структуре, описанной в данном документе. Пример такой алгоритмической структуры описывается в соответствии с фиг. 7.
[0056] Процесс 80 может включать в себя приведение в действие (этап 82) признака 22 аттракциона парка 12 развлечений, чтобы взаимодействовать с целью (например, гостем 16). Цель может быть гостем в парке 12 развлечений, другим признаком 22 аттракциона, самим признаком 22 аттракциона, другим объектом (объектами) в парке 12 развлечений или любым подходящим объектом. Приведение в действие признака 22 аттракциона может включать в себя управляемое накачивание одного или более приводов 44 текучей среды с использованием, например, управляющих сигналов, предоставляемых в источник текучей среды 46 и/или в одно или более устройств 54 управления текучей средой.
[0057] Процесс 80 может также включать в себя сбор (этап 84) на месте информации, связанной с взаимодействием между признаком 22 аттракциона (например, одного или более приводов 44 текучей среды) и целью. Информация на месте может включать в себя информацию (например, обратную связь в реальном времени), собранную посредством одного или более датчиков 42 (например, датчиков силы, датчиков давления, камер, датчиков свойств текучей среды, датчиков расхода).
[0058] Процесс 80 может также включать в себя анализ (этап 86) на месте информации, чтобы определять один или более параметров взаимодействия, ассоциированных с взаимодействием. В качестве примера, один или более параметров взаимодействия могут включать в себя, но не только, давление, силу, количество движения и соответствие признака 22 аттракциона (например, один или более приводов 44 текучей среды).
[0059] Как изложено выше, профиль движения и/или динамические характеристики объекта приводов 44 текучей среды признака 22 аттракциона могут изменяться, чтобы управлять или регулировать взаимодействия между признаком 22 аттракциона и целью. Соответственно, процесс 80 включает в себя изменение (этап 88) одного или более параметров объектов признака 22 аттракциона. Такие параметры объектов могут в частности быть связаны с приводами 44 текучей среды признака аттракциона. Например, изменение параметров объектов признака 22 аттракциона в соответствии с этапами, ассоциированными с блоком 88, может включать в себя изменение профиля движения признака 22 аттракциона на месте, чтобы поддерживать один или более параметров взаимодействия на требуемом уровне. Дополнительно или альтернативно, одно или более согласуемых характеристик объекта могут регулироваться на месте, чтобы поддерживать один или более параметров взаимодействия на требуемом уровне.
[0060] Например, контроллер 32 может определять, что один или более параметров взаимодействия, прикладываемых к цели, выше или ниже предварительно определенного порогового значения (например, не в требуемом диапазоне), и в ответ на это определение управлять потоком текучей среды в (или из) один или более приводов 44 текучей среды (например, накачиваемой массой одного или более приводов 44 текучей среды), чтобы регулировать массу объекта приводов 44 текучей среды до предварительно определенного (например, целевого) диапазона. Дополнительно или альтернативно, темп накачивания (или откачивания) приводов 44 текучей среды, относительные моменты времени накачивания (или откачивания) различных приводов 44 текучей среды или комбинация могут регулироваться, чтобы модифицировать профиль движения признака 22 аттракциона.
[0061] Таким образом, поток текучей среды в и из приводов 44 текучей среды может увеличиваться или уменьшаться с темпом, определенным посредством контроллера (например, контроллера 32 или устройства 48 управления), чтобы поддерживать или перемещать один или более параметров взаимодействия в пределах целевого диапазона.
[0062] Другие эффекты могут также координироваться посредством супервизора 40 шоу катания и контроллера 32, например, чтобы координировать перемещение катания, световые эффекты, звуковые эффекты и т.д. с управлением признаком 22 аттракциона. Например, предварительно запрограммированные звуковые и/или световые эффекты могут быть инициированы в ответ на перемещение признака 22 аттракциона в соответствующее положение и/или перемещение согласно конкретному профилю движения с различными световыми и звуковыми эффектами, предоставляемыми для различных профилей движения.
[0063] Хотя только конкретные признаки настоящих вариантов проиллюстрированы и описаны в данном документе, различные модификации и изменения должны быть очевидными специалистам в данной области техники. Следовательно, необходимо понимать, что прилагаемая формула изобретения имеет намерение охватывать все эти модификации и изменения как попадающие в пределы сущности настоящего раскрытия. Дополнительно, следует понимать, что определенные элементы раскрытых вариантов осуществления могут комбинироваться или обмениваться друг с другом.
Изобретение относится к области парков и развлечений, а именно к системам и способам, используемым для предоставления впечатлений парка развлечений с интерактивным оборудованием, и направлено на повышение реалистичности происходящего. Аттракцион содержит признак аттракциона, устройство управления текучей средой, датчик и контроллер. Признак аттракциона содержит привод текучей среды, имеющий накачиваемую массу, причем накачиваемая масса соединяется с возможностью обмена текучей средой с источником текучей среды под давлением, чтобы предоставлять накачивание накачиваемой массы. Устройство управления текучей средой сконфигурировано, чтобы регулировать накачивание накачиваемой массы. Датчик сконфигурирован, чтобы отслеживать характеристики состояния привода текучей среды. Контроллер соединен с возможностью обмена данными с устройством управления текучей средой и датчиком. Контроллер содержит инструкции, которые при выполнении сконфигурированы для: управляемого накачивания накачиваемой массы; расчета силы толчка, прикладываемой посредством привода текучей среды к объекту; определения, находится ли сила толчка в заданном диапазоне; и управления накачиванием накачиваемой массы, чтобы регулировать один или более параметров привода текучей среды. 3 н. и 17 з.п. ф-лы, 7 ил.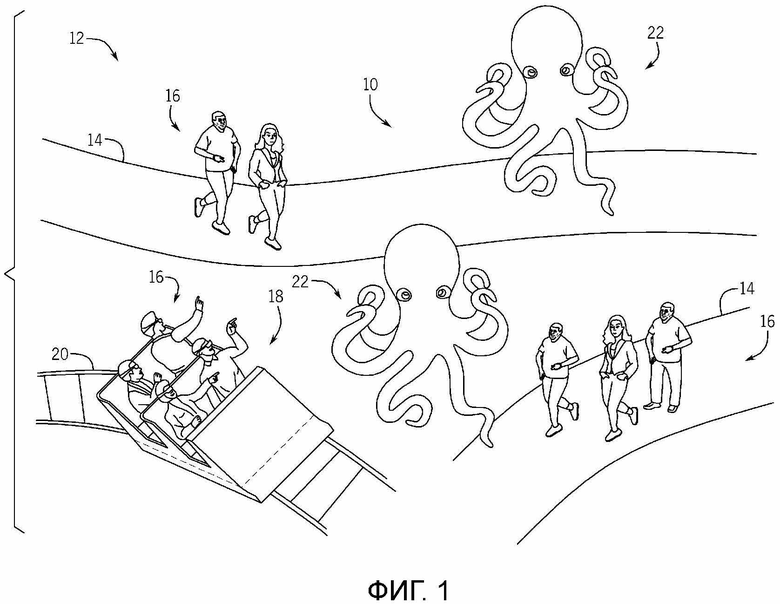
1. Аттракцион парка развлечений, содержащий:
признак аттракциона, содержащий привод текучей среды, имеющий накачиваемую массу, причем накачиваемая масса соединяется с возможностью обмена текучей средой с источником текучей среды под давлением, чтобы предоставлять накачивание накачиваемой массы;
одно или более устройств управления текучей средой, сконфигурированных, чтобы регулировать накачивание накачиваемой массы;
один или более датчиков, сконфигурированных, чтобы отслеживать характеристики состояния привода текучей среды; и
контроллер, соединенный с возможностью обмена данными с одним или более устройствами управления текучей средой и одним или более датчиками, причем контроллер содержит инструкции, которые при выполнении сконфигурированы для:
управляемого накачивания накачиваемой массы на основе по меньшей мере обратной связи от одного или более датчиков, чтобы инструктировать приводу текучей среды сталкиваться с объектом;
расчета силы толчка, прикладываемой посредством привода текучей среды к объекту, на основе по меньшей мере обратной связи от одного или нескольких датчиков;
определения, находится ли сила толчка в заданном диапазоне;
и
управления накачиванием накачиваемой массы, чтобы регулировать один или более параметров привода текучей среды, чтобы поддерживать силу толчка, прикладываемую посредством привода текучей среды к объекту в пределах предварительно определенного диапазона.
2. Аттракцион парка развлечений по п. 1, в котором инструкции сконфигурированы, чтобы вычислять максимальную силу толчка (F(max)) привода текучей среды по отношению к объекту с использованием обратной связи от одного или более датчиков и регулировать параметры привода текучей среды так, что вычисленная F(max) ниже порогового значения в режиме реального времени.
3. Аттракцион парка развлечений по п. 1, в котором инструкции сконфигурированы, чтобы регулировать операцию одного или более устройств управления текучей средой, чтобы поддерживать один или более параметров, прикладываемых посредством привода текучей среды к объекту, в пределах предварительно определенного диапазона в режиме реального времени.
4. Аттракцион парка развлечений по п. 3, в котором один или более параметров привода текучей среды содержат внутреннее давление, импульс, скорость, ускорение, массу, податливость или любую их комбинацию привода текучей среды.
5. Аттракцион парка развлечений по п. 1, содержащий звуковую систему, систему освещения или обе системы, и причем инструкции сконфигурированы, чтобы регулировать работу звуковой системы, системы освещения или обеих систем совместно с управляемым накачиванием или откачиванием накачиваемой массы.
6. Аттракцион парка развлечений по п. 1, в котором один или более датчиков содержат датчик силы, датчик давления, камеру, датчик свойства текучей среды или любую их комбинацию.
7. Аттракцион парка развлечений по п. 1, в котором контроллер соединяется с возможностью обмена данными с транспортным средством катания парка развлечений, и причем инструкции сконфигурированы, чтобы управляемо накачивать или откачивать накачиваемую массу на основе по меньшей мере работы транспортного средства катания, чтобы инструктировать признаку аттракциона оказывать влияние на гостя-человека на транспортном средстве катания или толкать часть транспортного средства катания.
8. Аттракцион парка развлечений по п. 1, в котором признак аттракциона содержит множество приводов текучей среды и в котором множество приводов текучей среды размещается в модели, которая задает форму признака аттракциона.
9. Аттракцион парка развлечений по п. 1, в котором инструкции сконфигурированы, чтобы управлять накачиванием накачиваемой массы, чтобы регулировать профиль движения привода текучей среды, чтобы поддерживать силу толчка, прикладываемую посредством привода текучей среды к объекту, в пределах предварительно определенного диапазона.
10. Аттракцион парка развлечений по п. 1, в котором инструкции сконфигурированы, чтобы управлять накачиванием накачиваемой массы, чтобы регулировать одну или более согласуемых характеристик объекта привода текучей среды, чтобы поддерживать силу, прикладываемую посредством привода текучей среды к объекту, в пределах предварительно определенного диапазона.
11. Аттракцион парка развлечений по п. 1, в котором инструкции сконфигурированы, чтобы выбирать одно или оба из управления накачиванием накачиваемой массы, чтобы регулировать одну или более согласуемых характеристик объекта привода текучей среды, или управления профилем движения привода текучей среды, чтобы поддерживать силу, прикладываемую посредством привода текучей среды к объекту, в пределах предварительно определенного диапазона.
12. Способ работы признака аттракциона парка развлечений, содержащий этапы, на которых:
накачивают привод текучей среды признака аттракциона, чтобы перемещать признак аттракциона вдоль профиля движения, чтобы инструктировать взаимодействие между признаком аттракциона и целью, причем взаимодействие содержит физический контакт между признаком аттракциона и целью;
собирают информацию, связанную с взаимодействием между признаком аттракциона и целью с использованием одного или более датчиков при возникновении взаимодействия;
анализируют через контроллер в соединении с одним или более датчиками собранную информацию от одного или более датчиков, чтобы определять параметр взаимодействия, ассоциированный с взаимодействием; и
регулируют накачивание привода текучей среды при возникновении взаимодействия, чтобы поддерживать параметр взаимодействия в целевом диапазоне.
13. Способ по п. 12, в котором взаимодействие содержит физический контакт между приводом текучей среды признака аттракциона и целью, и при этом анализ собранной информации содержит этап, на котором непрерывно вычисляют максимальную силу толчка (F(max)) привода текучей среды по отношению к цели с использованием собранной информации, и при этом регулирование накачивания привода текучей среды содержит этап, на котором накачивают или откачивают привод текучей среды, чтобы регулировать согласуемую характеристику объекта привода текучей среды.
14. Способ по п. 12, в котором регулирование накачивания привода текучей среды содержит этап, на котором накачивают или откачивают привод текучей среды, чтобы регулировать профиль движения признака аттракциона.
15. Способ по п. 14, в котором регулирование профиля движения инструктирует по меньшей мере фрагменту признака аттракциона отдаляться от цели.
16. Пневматическая роботизированная система, содержащая:
признак аттракциона, содержащий множество приводов текучей среды, сконфигурированных, чтобы предоставлять форму и профиль движения признака аттракциона в ответ на управляемое накачивание;
источник текучей среды, соединенный с возможностью обмена текучей средой с признаком аттракциона и сконфигурированный, чтобы предоставлять текучую среду под давлением во множество приводов текучей среды;
одно или более устройств управления текучей средой, сконфигурированных, чтобы управлять текучей средой под давлением, вытекающей из источника текучей среды во множество приводов текучей среды;
один или более датчиков, ассоциированных с признаком аттракциона и сконфигурированных, чтобы отслеживать характеристики состояния множества приводов текучей среды; и
контроллер, соединенный с возможностью обмена данными с одним или более устройствами управления текучей средой и с одним или более датчиками, причем контроллер содержит инструкции, которые при выполнении сконфигурированы для:
анализа обратной связи от одного или более датчиков, связанных с взаимодействием между признаком аттракциона и целью при возникновении взаимодействия, чтобы определять один или более параметров взаимодействия, ассоциированных с взаимодействием, при этом взаимодействие между признаком аттракциона и целью содержит физический контакт между признаком аттракциона и целью; и
регулирования накачивания по меньшей мере одного привода текучей среды из множества приводов текучей среды, чтобы поддерживать один или более параметров взаимодействия в предварительно определенном диапазоне при возникновении взаимодействия.
17. Пневматическая роботизированная система по п. 16, в которой инструкции сконфигурированы, чтобы определять один или более параметров взаимодействия путем непрерывного вычисления максимальной силы толчка (F(max)) признака аттракциона по отношению к цели, и в которой контроллер сконфигурирован, чтобы регулировать накачивание по меньшей мере одного привода текучей среды из множества приводов текучей среды, чтобы регулировать профиль движения признака аттракциона, или сконфигурированы, чтобы накачивать или откачивать по меньшей мере один из приводов текучей среды множества приводов текучей среды, чтобы регулировать согласуемую характеристику объекта привода текучей среды, или и то и другое, чтобы поддерживать один или более параметров взаимодействия в предварительно определенном диапазоне при возникновении взаимодействия.
18. Пневматическая роботизированная система по п. 17, в которой инструкции сконфигурированы, чтобы управлять потоком текучей среды под давлением во множество приводов текучей среды, чтобы регулировать разность давлений через по меньшей мере один привод текучей среды из множества приводов текучей среды или среднее внутреннее давление по меньшей мере одного привода текучей среды из множества приводов текучей среды.
19. Пневматическая роботизированная система по п. 16, в которой один или более датчиков содержат датчик силы, датчик давления, камеру, датчик свойства текучей среды или любую их комбинацию.
20. Пневматическая роботизированная система по п. 16, содержащая звуковую систему, систему освещения или обе системы и при этом контроллер сконфигурирован, чтобы управлять работой звуковой системы, системы освещения или обеих систем на основе профиля движения признака аттракциона.
| ШАРНИРНОЕ УСТРОЙСТВО ДЛЯ КУКЛЫ | 1992 |
|
RU2083256C1 |
| WO 2016167851 A2, 20.10.2016 | |||
| Хлебопекарная печь системы Н.В. Беликова и Н.И. Краснопевцева с двухконтурной циркуляцией среды тупиковой пекарной камеры и улучшенным гигротермическим режимом. | 1959 |
|
SU124886A1 |

