ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к импедансам акустической нагрузки, используемым для калибровки зондов, которые применяются для определения акустических характеристик источника. Более конкретно, изобретение относится к определению акустических характеристик источника диагностических зондов и слуховых аппаратов.
УРОВЕНЬ ТЕХНИКИ
Акустическая калибровка по Тевенину - это способ, используемый для определения эквивалентных параметров Тевенина акустических зондов, используемых в диагностике слуховых функций и слуховых аппаратов (СА). Калибровка по Тевенину является важным шагом калибровки для выполнения акустических измерений, например, в приложениях диагностики слуховых функций, что обусловлено требованиями высокой точности, необходимой при проведении диагностики слуховых функций, чтобы оценить потенциальную потерю слуха. Таким образом, акустические датчики, используемые, по меньшей мере, в приложениях диагностики слуховых функций, должны быть откалиброваны до фактических диагностических измерений.
Акустическая калибровка по Тевенину определяет характеристики источника (т.е. давление источника и импеданс источника) акустического зонда, который будет использоваться для измерений в объекте, таком как наружный слуховой проход испытуемого. Нахождение характеристик источника акустического зонда на этапе калибровки, позволяет измерить любой импеданс нагрузки, приложенной к зонду или СА. Таким образом, калибровка по Тевенину акустического зонда является этапом калибровки, который обычно выполняется до фактических измерений в объекте, таком как наружный слуховой проход пользователя, для которого нужно измерить импеданс с целью, например, определения диагноза. Аналогичным образом, в других акустических применениях, таких как музыкальная акустика, калибровка по Тевенину также может быть применена к акустическим зондам перед измерением, например, импеданса акустического инструмента, такого как музыкальный инструмент, чтобы получить рабочую характеристику акустического музыкального инструмента.
Соответственно, в области измерения акустических характеристик объекта в целом высоко оценивается выполнение калибровки по Тевенину акустических зондов перед фактическими измерениями интересующего объекта.
Метод калибровки по Тевенину основан на предоставлении ряда опорных нагрузок для зонда или СА, чьи импедансы известны или могут быть вычислены аналитически. Как правило, эти нагрузки являются цилиндрическими волноводами с жесткими стенками различной длины. Ответ в каждом волноводе затем используется для нахождения параметров Тевенина (т.е. характеристик источника зонда), используя аппроксимацию методом наименьших квадратов (т.е. решение уравнения наименьших квадратов, чтобы найти давление источника и импеданс источника).
Эта процедура калибровки на практике очень чувствительна к вычисленному или предполагаемому импедансу плоской волны волновода. В действительности, истинный импеданс (т.е. измеряемый импеданс нагрузки), с точки зрения зонда (или СА), отличается от аналитического импеданса из-за явлений, связанных со звуком, проходящим от узкого отверстия для подачи (такого как трубка или кольцевая щель) в зонде (или СА) к более широкому волноводу. Измеряют звуковое давление в непосредственной близости от подающей трубки, внося ошибку в снимаемую амплитудно-частотную характеристику.
В области акустических применений, в общем известно, что такие вносимые погрешности обусловлены геометрическим несоответствием между акустическим зондом и нагрузкой, прилагаемой к нему, и что они связанны, по меньшей мере, с затухающими колебаниями. Таким образом, наблюдается общая потребность в том, чтобы избежать последствий, по меньшей мере, затухающих колебаний при измерениях импеданса интересующего объекта.
Один подход, используемый для того, чтобы избежать затухающих колебаний при измерении акустического импеданса реального приспособления для уха (т.е. трубки акустического зонда, которая вставляется в наружный слуховой проход испытуемого субъекта) был направлен на достаточное ослабление любого локализованного, не распространяющегося акустического поля, создаваемого затухающими колебаниями. Это было достигнуто за счет ограничения частотного спектра внешнего сигнала возбуждения или за счет вытаскивания микрофона зонда, записывая при этом ответ тест-объекта, немного за плоскость излучателя зонда, излучающего звуковые сигналы возбуждения в тест-объект. Другими словами, один из способов введения поправки затухающих колебаний состоит в том, чтобы высунуть измерительный микрофон акустического датчика на заданное расстоянии за плоскость наконечника зонда, в результате чего на отклик зонда значительно меньше воздействуют затухающие колебания. Основной недостаток этого подхода состоит в том, что лишний волновод между выходом источника и входом микрофона входит в характеристики источника, предоставляя неверную калибровку при вставке в волновод других размеров.
Другие способы, направленные на введение поправки на погрешности измерений импеданса, вносимых геометрическим несоответствием, нацелены на применение поправочного коэффициента к получаемым в результате измерениям импеданса, выполненным на тест-объекте, и любой последующей процедуре калибровки зонда.
Как подробно рассказывалось ранее, в данной области известно, что для проведения измерений акустического входного импеданса акустических волноводов с использованием традиционного импедансного датчика, содержащего кольцевую щель, излучающую звук, предполагается обеспечивать постоянную объемную скорость. Кроме того, акустические зонды, используемые для измерения входных импедансов, как уже было описано, на первом этапе калибруются перед реальными измерениями импеданса с тем, чтобы получить параметры Тевенина (т.е. характеристики источника) акустического зонда, используемого для измерения импеданса. На втором последующем этапе, калиброванный акустический зонд вставляется в тест-объект, устройство, другой волновод или прибор, импеданс которого должен быть измерен. Как было описано выше в реальных измерениях импеданса, неважно, выполняемых ли, например, в наружном слуховом проходе или при музыкальном применении, также могут возникать погрешности, связанные с геометрическим несоответствием между акустическим зондом и тест-объектом.
В дополнение к уже описанному способу предшествующего уровня техники, другие предложенные способы введения поправки на такие погрешности в измеряемый импеданс после калибровки акустического зонда, используемого для измерения, таким образом включая в себя коррекцию полученных результатов измерения импеданса. Предлагается, что такие поправки делаются путем визуального осмотра измеренного импеданса, и включают в себя формирование мнимого, пропорционального частоте поправочного коэффициента, который регулируется таким образом, что минимумы импедансов расположены посередине между двумя последовательными максимумами в измерениях импеданса. Кроме того, действительный поправочный коэффициент, пропорциональный квадратному корню из частоты, регулируется таким образом, что огибающая минимумов импеданса точно такая же, как и огибающая максимумов импеданса. Этот способ делать поправку на геометрическое несоответствие влечет за собой некоторые ограничения на последующие измерения с помощью акустических зондов. При нахождении поправочных коэффициентов калиброванного акустического датчика это делается в трубке, имеющей конкретное соответствие геометрии с геометрией измеряемого объекта. Это влечет за собой ограничение в том, что измерительное устройство для измерения заключительного измерения импеданса должно по существу быть соединено с акустическим зондом через трубки, имеющие такой же диаметр, что и трубка, которая использовалась для оценки поправочных коэффициентов. Таким образом, поправочные коэффициенты, связанные с геометрическим несоответствием и найденные этим способом, могут использоваться только для ограниченного количества реальных устройств, имеющих по существу ту же геометрию, что и принятая во время измерений поправки в передней части зонда.
Как видно, известные способы не связаны с определением характеристик источника зонда, чьи характеристики определены на предыдущем этапе калибровки традиционным способом путем размещения кольцевого зонда в полубесконечном волноводе. Калибровка возможна с использованием только одной нагрузки, так как предполагается, что этот зонд является источником постоянной объемной скорости. Это эквивалентно предположению об импедансе бесконечно удаленного источника в параметрах Тевенина. Такая калибровка будет зависеть от затухающих колебаний, но так как в спектре импеданса не отражающей нагрузки нет минимума импеданса, относительное влияние будет незначительным.
Кроме того, известные способы предполагают введение поправок на затухающие колебания после калибровки акустических зондов, которые должны использоваться для измерений импеданса, тем не менее влекут за собой некоторые ограничения для последующих фактических измерений устройством. Таким образом, потенциальные ошибки, вносимые уже при калибровке акустического зонда, не учитываются в существующих способах.
Таким образом, существует необходимость предоставить решение, которое устраняет или, по меньшей мере, уменьшает погрешности при калибровке, связанные с упомянутым выше геометрическим несоответствием между зондом и заданным волноводом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Эта и другие цели достигаются предложением способа калибровки, который учитывает любое геометрическое несоответствие любой нагрузки, прикладываемой к акустическому зонду (такому как проверяемое устройство) во время калибровки акустического зонда, который следует использовать для последующих измерений импеданса с устройствами, представляющими интерес.
То есть, в соответствии с первым аспектом настоящего изобретения, описанные вначале проблемы решаются или, по меньшей мере, уменьшаются посредством предоставления способа проведения акустической калибровки по Тевенину зондов или слуховых аппаратов, причем способ включает в себя этапы представления множества различных акустических нагрузок, по одной акустической нагрузке в конкретный момент времени, к выходу зонда или слухового аппарата, характеристики источника которого должны быть определены. Каждая из акустических нагрузок в соответствии с настоящим изобретением характеризуется известным акустическим входным импедансом (который, например, может быть вычислен аналитически или определен априори на основании соответствующих измерений) и дополнительным частотно-зависимым комплексным поправочным коэффициентом ΔZ(f). Путем применения этого исправленного входного импеданса акустической нагрузки, соотношение (т.е. отношение) между звуковым давлением на микрофон зонда и объемной скоростью, вносимой зондом, можно определить правильно для множества частот, получая таким образом требуемые по существу правильные характеристики источника зонда или слухового аппарата.
Благодаря такому способу достигается то, что погрешности, вносимые в отклик зонда из-за геометрического несоответствия, учитываются уже при калибровке по Тевенину акустического зонда на этапе до фактического измерения импеданса устройства. Таким образом, последующее измерение импеданса, осуществляемое с помощью калиброванного зонда, будет учитывать потенциальные воздействия затухающих колебаний и потерь потока, на которые были введены поправки в процессе калибровки.
Более подробно, традиционный способ калибровки по Тевенину основан на представлении ряда различных акустических нагрузок (обычно волноводов различной длины) для акустического зонда. Импедансы этих акустических нагрузок известны или могут быть вычислены аналитически. Эти акустические нагрузки будут в дальнейшем назваться «аналитическими импедансами» или «эталонными импедансами». Следует понимать, что поправочные коэффициенты, описываемые в данном раскрытии, применяются непосредственно к каждой из акустических нагрузок, используемых на этапе калибровки акустического зонда по Тевенину.
Следует отметить, что, хотя акустические нагрузки в дальнейшем иллюстрируются посредством акустических волноводов, акустические нагрузки в соответствии с настоящим изобретением могут представлять собой любую полость любых размеров и геометрии, которая будет воспроизводить те полости, которые можно использовать в способе и устройствах в соответствии с настоящим раскрытием.
В действительности, истинный импеданс, обнаруженный зондом, отличается от аналитического импеданса плоской волны из-за явлений, связанных со звуком, проходящим от узкого отверстия (например, трубки или щели) в зонд или слуховой аппарат к более широкому волноводу. Эти явления, как было описано ранее, вызваны геометрическим несоответствием между акустическим зондом, используемым для измерений импеданса и тест-объектом (например, нагрузкой, волноводом, наружным слуховым проходом или подобным), в который вставлен акустический датчик. Это геометрическое несоответствие вносит погрешности в измеренный импеданс, как правило рассматриваемые как смещения минимумов на кривой импеданса, которые смещены, с точки зрения аналитического импеданса. Таким образом, при нахождении характеристик источника зонда, т.е. давления источника и импеданс источника с использованием калибровки по Тевенину, эталонный импеданс (называемый также аналитическим или смоделированным импеданом) должен быть исправлен так, чтобы учитывать такие несоответствия, чтобы получить точное следующее измерение импеданса акустической нагрузки, приложенной к датчикам. Таким образом, в контексте данного раскрытия следует понимать, что «по существу правильная характеристика источника зонда» это характеристики источника (т.е. звуковое давление и объемная скорость), которые учитывают любые погрешности, вносимые геометрическим несоответствием между акустическим зондом и нагрузкой, приложенной к нему во время калибровки. Такой калиброванный по Тевенину зонд, учитывающий поправочный коэффициент на любое геометрическое несоответствие, в соответствии с раскрытием в процессе калибровки, можно использовать в последующем измерении импеданса устройства, но теперь измерения акустического импеданса, содержащего эффекты, индуцированные несоответствием геометрии зонда и акустической нагрузкой, при исследовании учитываются в измеренном импедансе.
Таким образом, погрешности, вносимые этим геометрическим несоответствием, можно значительно уменьшить посредством применения комплексного частотно-зависимого поправочного коэффициента (или функции) к аналитическим импедансам, используемым в способе, описываемом в настоящем документе. То есть, поправочный коэффициент может быть применен к любому из аналитических импедансов каждой из нагрузок, используемых с целью выполнения калибровки по Тевенину. Комплексный поправочный коэффициент может выражаться как:
 (1)
(1)
Добавление действительной части поправочного коэффициента к действительной части аналитического импеданса приводит к тому, что затухание в минимумах импеданса изменяется, т.е. показатель добротности минимумов импеданса уменьшается или увеличивается. Добавление мнимой части поправочного коэффициента к мнимой части аналитического импеданса приводит к тому, что минимумы оцениваемого импеданса сдвигаются по частоте в то время как максимумы сохраняются.
Поправочный коэффициент, добавляемый к действительной части аналитического импеданса стремится добавить эффекты, которые возникают из-за особенности скорости, которая возникает, когда звук распространяется вокруг острого угла, к аналитическому импедансу. В первую очередь этот эффект наблюдаем, когда акустическое давление измеряют очень близко к средству звукового вывода, так как большие градиенты в поле скоростей должны быть сбалансированы эквивалентным падением давления в уравнении импульса.
Мнимый поправочный коэффициент стремится добавить эффекты от затухающих колебаний к аналитическому импедансу. Затухающие колебания возникают, когда звук переходит от узкого к широкому волноводу в виде суперпозиции распространения сферической волны и плоской волны, проходящей короткое расстояние вдоль волновода.
В предшествующем уровне такой комплексный поправочный коэффициент добавлялся к реальным измеренным импедансам, как описано выше в разделе «уровень техники», и не как часть калибровки по Тевенину акустического зонда, используемого для указанных реальных измерений. Как подробно рассказывалось ранее это, однако, влечет за собой по меньшей мере, такое ограничение, что для дальнейшего использования найденных поправочных коэффициентов в новом измерении импеданса, по существу, должна предоставляться та же геометрия измеряемого объекта для того, чтобы получить точные измерения импеданса. Как описано выше, эта форма введения поправки на затухающее колебание после калибровки по Тевенину акустического зонда не связана со способом, описываемом в данном раскрытии и такая коррекция не будет принимать во внимание погрешности, индуцированные уже в процессе калибровки акустического зонда.
Согласно варианту осуществления изобретения, поправочные коэффициенты настраиваются в итерационном процессе отдельно для каждого волновода с тем, чтобы получить минимально возможную погрешность (которая определяется как способность полученных параметров по Тевенину оценить скорректированный эталонный импеданс) и/или визуальное выравнивание графиков с учетом незначительных различий при установке зонда в акустическую нагрузку, приводящих к изменению поправочных коэффициентов для каждого волновода. Число итерационных шагов для того, чтобы погрешность сходилась к минимуму, уменьшается при применении начального значения для обоих поправочных коэффициентов, равного ожидаемому значению для конкретной комбинации зонда и волновода, полученного из предыдущей калибровки.
В соответствии с первым вариантом осуществления первого аспекта настоящего раскрытия упомянутые выше нагрузки являются входным импедансом соответствующих акустических волноводов. Неограничивающий пример волновода, который можно использовать в соответствии с настоящим раскрытием, показан и описан в следующей подробном описании.
В соответствии со вторым вариантом осуществления первого аспекта настоящего раскрытия, известные акустические импедансы определяются аналитически.
В соответствии с третьим вариантом осуществления первого аспекта настоящего раскрытия поправочные коэффициенты настраиваются отдельно для каждой нагрузки или волновода в итерационном процессе, в результате чего получается минимально возможная погрешность из-за небольших различий в установке зонда в акустическую нагрузку, приводящее к изменению поправочных коэффициентов для каждого волновода.
В соответствии с четвертым вариантом осуществления первого аспекта настоящего раскрытия число итерационных шагов, необходимых для того, чтобы погрешность сходилась к минимуму, уменьшается при применении начального значения для обоих поправочных коэффициентов, равного ожидаемому значению для конкретной комбинации зонда и волновода, полученного из предыдущей калибровки.
В соответствии с пятым вариантом осуществления настоящего раскрытия частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:
 (2)
(2)
где:
 (3)
(3)
В соответствии со вторым аспектом настоящего раскрытия предлагается полость для акустической калибровки по Тевенину диагностических зондов и слуховых аппаратов, причем полость снабжена держателем зонда, выполненным с возможностью присоединения средства звукового вывода акустического зонда или слухового аппарата к полости. Акустический входной импеданс, если смотреть со стороны средства звукового вывода из акустического зонда представляет собой сочетание известного акустического входного импеданса и дополнительного частотно-зависимого комплексного поправочного коэффициента ΔZ(f), который определяется выражением:
Согласно варианту осуществления второго аспекта настоящего изобретения, полость представляет собой волновод с участком корпуса, содержащим внутренний, по существу, цилиндрический канал заданной длины и заданного диаметра, каковой канал на первом продольном конце оканчивается по существу акустически жесткой пластиной и на противоположном втором продольном конце снабжен держателем зонда, выполненным с возможностью присоединения средства звукового вывода зонда к второму продольному концу канала.
Согласно варианту осуществления второго аспекта раскрытия, частотно-зависимый комплексный поправочный коэффициент определяется выражением:
где Cre и Cim действительные постоянные, f частота и i мнимая единица.
Понятно, что, хотя в некоторых из вариантов осуществления, описанных и заявленных в настоящем раскрытии, действительные и мнимые части частотно-зависимого комплексного поправочного коэффициента определяются выражением (3), приведенным выше. Способ и устройство в соответствии с настоящим раскрытием не ограничиваются применением данного конкретного поправочного коэффициента.
По сравнению с первоначальным способом (т.е. способами предшествующего уровня техники), где никакие поправочные коэффициенты не применяются при калибровке по Тевенину акустических зондов, используемых для измерений импеданса, получается гораздо более гладкая и точная калибровка. Это особенно важно в случае и в окрестности минимумов эталонного импеданса, где поправочные коэффициенты составляют относительно большую часть импеданса. Непосредственным преимуществом данного изобретения является, конечно, более точный диагностический вывод зонда (или СА). Кроме того, так как поправочные коэффициенты обычно масштабируют с частотой, это раскрытие кажется решающим, если требуется калибровка при очень высоких частотах. В последние годы, некоторые исследования были направлены на выведение различных параметров, таких как функция области наружного слухового прохода и отражение временного интервала из одного измерения импеданса. Оценка многих из этих параметров, как представляется, использует значительное преимущество увеличенной с точности калибровки и возможности калибровки на более высоких частотах. В качестве последнего пункта, раскрытие теоретически делает возможной калибровку зондов или слуховых аппаратов с гораздо более радикальным несовпадением геометрии с калибровочными волноводами, чем возможно в настоящее время.
Типичным вариантом использования в связи с раскрытием для акустического зонда является преобразование измеренного акустического импеданса в отражение энергии или поглощение в диагностическом контексте, но может также включать в себя оценку уровня стимула в ото-акустических выделениях продуктов искажения. Для СА, возможные использования включают в себя контроль функции среднего уха с использованием абсорбции и упрощенного фитинга СА благодаря отсутствию микрофона зонда, нужного в непосредственной близости к барабанной перепонке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Аспекты раскрытия можно лучше понять из следующего подробного описания, во взаимосвязи с прилагаемыми фигурами. Для ясности фигуры показаны схематически и упрощенно, и они просто показывают детали для улучшения понимания формулы изобретения, в то время как другие детали опущены. Во всем тексте одинаковые ссылочные позиции используются для идентичных или соответствующих частей. Каждый из отдельных признаков каждого аспекта может быть объединен с любым или всеми признаками других аспектов. Эти и другие аспекты, особенности и/или технический эффект будут очевидны и пояснены со ссылкой на иллюстрации, описываемые в настоящем документе далее по тексту, в котором:
На Фигуре 1 показано поперечное сечение примерного варианта осуществления калибровочного волновода в соответствии с раскрытием, содержащего держатель зонда (показан темным цветом), который вставляется в цилиндрический волновод;
На Фигуре 2 показаны результаты калибровки без каких-либо применяемых значений поправки, где на фигуре 2(а) показана величина амплитуды импеданса, на фигуре 2(b) показана фаза импеданса и на фигуре 2(c) показано абсолютное значение относительной погрешности, соответствующее каждому соответствующему из четырех применяемых волноводов;
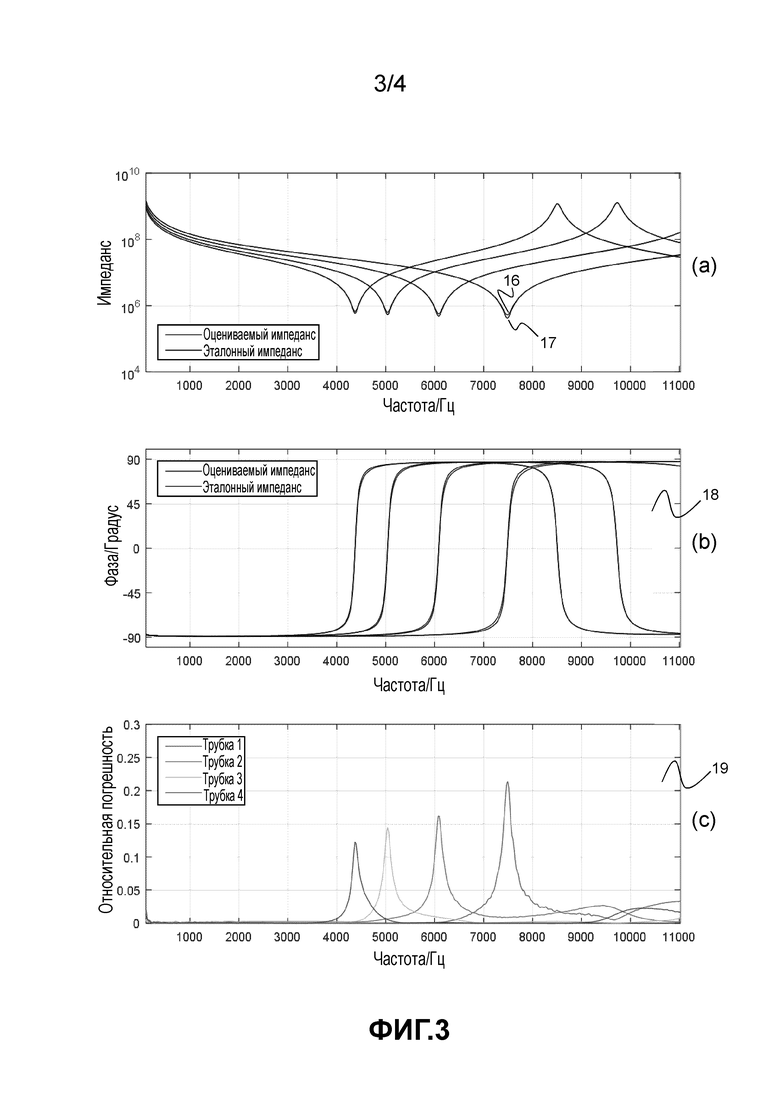
На Фигуре 3 показаны результаты калибровки, аналогичные тем, которые показаны на фигуре 2, с использованием только мнимых поправочных функций; и
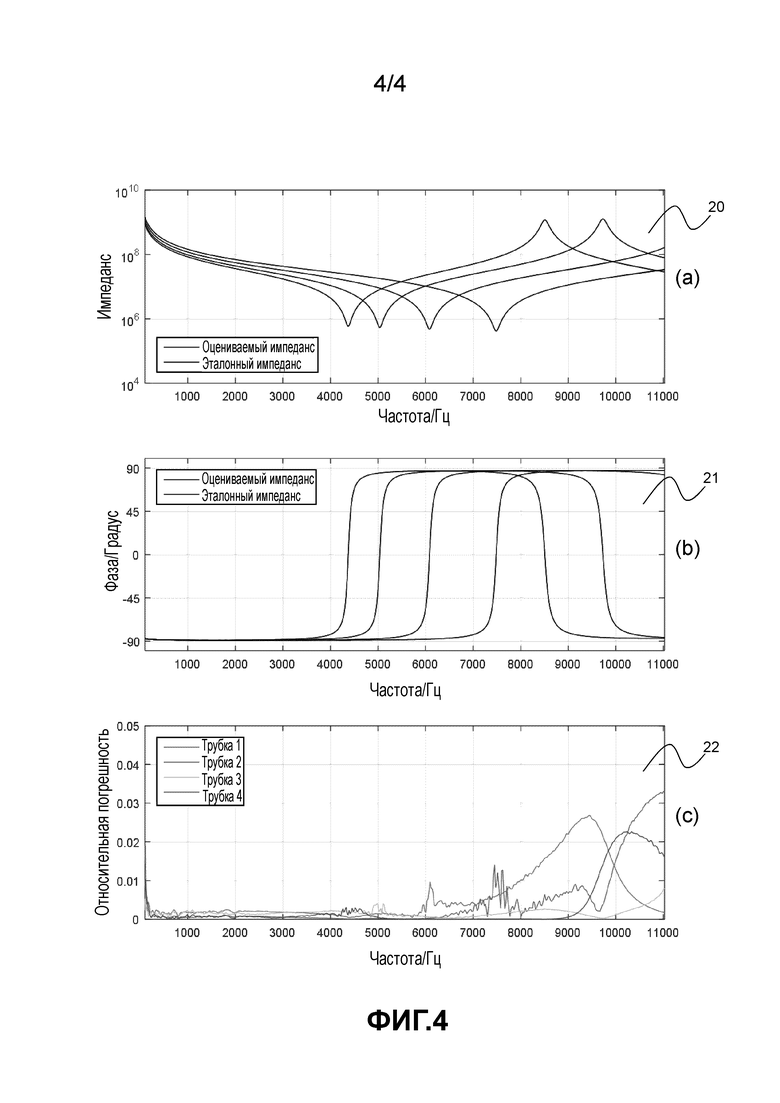
На Фигуре 4 показаны результаты калибровки, аналогичные тем, которые показаны на фигуре 2, в которых используются как действительные, так и мнимые поправочные функции;
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ РАСКРЫТИЯ
Подробное описание, приводимое ниже вместе с прилагаемыми чертежами, предназначено в качестве описания различных конфигураций. Подробное описание включает в себя конкретные детали с целью обеспечения полного понимания различных идей. Однако для специалиста в данной области очевидно, что эти идеи могут быть осуществлены на практике без этих конкретных деталей. Некоторые аспекты системы и способа описываются с помощью различных блоков, функциональных блоков, модулей, компонентов, схем, этапов, процессов, алгоритмов и т.д. (все вместе обозначаемых «элементами»). В зависимости от конкретного применения, конструктивных ограничений или других причин, эти элементы могут быть реализованы с использованием электронных аппаратных средств, компьютерных программ или любого их сочетания.
Обратимся к фигуре 1, на которой показано поперечное сечение элемента калибровочного волновода в соответствии с вариантом осуществления раскрытия, в целом указанного ссылочной позицией 1. Волновод содержит цилиндрический участок 2 корпуса, проходящий в продольном направлении вдоль продольной оси X. Внутри цилиндрического участка 2 корпуса предусмотрена полость 3, представляющая собой волновод как таковой, и которая на одном своем конце 5 заканчивается по существу акустически жесткой пластиной 6, которая прикреплена к участку 2 корпуса посредством второго резьбового концевого участка 7. На противоположном продольном конце 4 элемента 1 волновода вставлен держатель 8 зонда, который изготовлен из подходящего упругого материала, такого как резина. Держатель 8 зонда прикреплен к корпусу 2 элемента 1 волновода посредством первого резьбового концевого участка 9. Проксимальный конец держателя зонда определяет входную плоскость 10 волновода. Участок 2 корпуса может быть выполнен из алюминия или другого подходящего материала. Измеряющий импеданс зонд (не показан на фигуре 1) может быть вставлен в держатель 8 зонда. Типичный зонд для измерения импеданса будет состоять из двух проводящих звук каналов, один для излучения звукового сигнала от соответствующего источника в волновод 3 и один для проводящего звук от волновода к измерительному микрофону. Держатель зонда позволяет помещать кончик зонда, где звук от источника излучения звука поступает в волновод и подобран с помощью измерительного микрофона, точно на одном уровне с входной опорной плоскостью полости 3 волновода.
Важно, чтобы зонд был правильно размещен в каждом калибровочном волноводе. Согласно варианту осуществления способа в соответствии с раскрытием используется набор из четырех волноводов длиной 1,2 см, 1,45 см, 1,75 см, 2 см, каждый из которых имеет диаметр 4 мм. Для того, чтобы получить конкретную длину волновода, зонд должен быть помещен точно на одном уровне с входной плоскостью 10 волновода. Это достигается с помощью конфигурации, показанной на фигуре 1.
В способе в соответствии с раскрытием, например, каждый из четырех волноводов используются в калибровке по Тевенину акустического зонда, где, по меньшей мере, один комплексный поправочный коэффициент применяется к каждому из эталонных импедансов волноводов. Таким образом, в настоящем примере, по меньшей мере, четыре отклика зонда используются в последующей оптимизации погрешностей методом наименьших квадратов для получения оптимальной характеристики источника акустического зонда, используемого для измерений. Таким образом, акустический зонд калибруется до фактических измерений импеданса на устройстве, представляющем интерес, так чтобы учесть любые погрешности в эталонных импедансах, которые вызваны, по меньшей мере, значительным диапазоном геометрических несоответствий между акустическим зондом и нагрузкой, приложенной к нему.
Следующие фигуры 2, 3 и 4 иллюстрируют пример полезного эффекта применения принципов настоящего раскрытия. Показанные результаты соответствуют четырем различным волноводам.
На фигуре 2 показаны результаты калибровки без каких-либо применений поправочных функций. Фигура 2(a) показывает амплитуду оцениваемых импедансов 12, которые основаны на фактических измерениях для четырех различных длин волновода по сравнению с соответствующими эталонными импедансами 11, на фигуре 2(b) показана фаза оцениваемых и соответствующих эталонных импедансов 14, 13 соответственно, и на фигуре 2(c) показано абсолютное значение 15 относительной погрешности, соответствующее каждому соответствующему из четырех применяемых волноводов. Как ясно видно из фигуры 2(c) калибровка без применения каких-либо поправочных функций приводит к очень большим погрешностям из-за геометрического несоответствия между зондом и волноводам. Из фигуры 2(a, ясно видно, что геометрическое несоответствие между зондом и акустическими волноводами вводит существенный сдвиг в минимумы измерения импеданса, причем этот сдвиг ведет к значительной погрешности в импедансе, если используется без какой-либо поправки.
В соответствии с настоящим раскрытием большие погрешности, которые являются результатом вышеупомянутого несоответствия исправляются путем применения комплексного частотно-зависимого поправочного коэффициента
где f частота и i мнимая единица. Эта поправка применяется к измерениям импеданса, выполненным на волноводах, используемых для калибровки по Тевенину акустического зонда.
Согласно Fletcher и др. (2005) было предложено использовать следующую действительную и мнимую часть комплексной поправочной функции ΔZ(f):
Однако надо явным образом отметить, что настоящее раскрытие не ограничивается использованием указанных выше поправочных функцй ΔZre(f) и ΔZim(f). Кроме того, следует также отметить, что способ, описанный Fletcher и др., не направлен на поиск каких-либо характеристик источника акустического зонда из калибровки по Тевенину, которые следует использовать для последующих измерений. Вернее способ Fletcher подразумевает, что такая калибровка по Тевенину выполняется на первом этапе, до каких-либо дальнейших измерений импеданса. Таким образом, поправка на любое геометрическое несоответствие применяется к определенной нагрузке, имеющей заданную геометрию, в результате чего найденные поправочные коэффициенты по существу могут быть применены только к устройству с похожей геометрией и/или похожими размерами, как подробно рассказывалось ранее.
Напротив, способ описываемый в настоящем документе, применяет комплексный поправочный коэффициент уже во время калибровки по Тевенину акустического зонда, который будет использоваться для последующих измерений. Таким образом обеспечивается то, что отношение между акустической объемной скоростью на выходе динамика зонда и звуковое давление на входе микрофона, используемого в процессе калибровки, моделируется гораздо более точно, чем, когда используется просто импеданс плоской волны. В отличие от Fletcher и др. последующие измерения импеданса неизвестных акустических нагрузок будут включать в себя все эти эффекты.
Обратимся теперь к фигуре 3, где представлены результаты калибровки, при которой используется только мнимая поправочная функция  . Каждый параметр оптимизирован для каждого волновода с тем, чтобы учесть небольшие различия в держателе зонда. На фигуре 3(a) показаны амплитуды оцениваемых импедансов 17 в сравнении с соответствующими эталонными импедансами 16, на фигуре 3(b) показана фаза оцениваемого и соответствующего эталонного импеданса и на фигуре 3(c) показано абсолютное значение относительной погрешности 19, соответствующее каждому соответствующему из четырех применяемых волноводов. Как ясно видно из фигуры 3(c) минимумы импеданса теперь совмещены и погрешность значительно снижается, но минимумы в оцениваемых импедансах глубже с более резкими изменениями фазы от -90 до +90 градусов. Это указывает на разницу в величине затухания, вызванного потерями потока.
. Каждый параметр оптимизирован для каждого волновода с тем, чтобы учесть небольшие различия в держателе зонда. На фигуре 3(a) показаны амплитуды оцениваемых импедансов 17 в сравнении с соответствующими эталонными импедансами 16, на фигуре 3(b) показана фаза оцениваемого и соответствующего эталонного импеданса и на фигуре 3(c) показано абсолютное значение относительной погрешности 19, соответствующее каждому соответствующему из четырех применяемых волноводов. Как ясно видно из фигуры 3(c) минимумы импеданса теперь совмещены и погрешность значительно снижается, но минимумы в оцениваемых импедансах глубже с более резкими изменениями фазы от -90 до +90 градусов. Это указывает на разницу в величине затухания, вызванного потерями потока.
На фигуре 4 представлены результаты калибровки, где используются как действительные, так и мнимые поправочные функции:

На фигуре 4(a) представлена амплитуда 20 оцениваемого и эталонного импедансов, соответственно (на фигуре они практически совпадают), на фигуре 4(b) представлена фаза 21 оцениваемого и эталонного импедансов, и на фигуре 4(c) представлено абсолютное значение 22 относительной погрешности, соответствующее каждому соответствующему из четырех применяемых волноводов. Как ясно видно из фигуры 2(c) затухание было учтено в достаточной степени, и ошибка упала до крайне низкого уровня.
Приведенные выше примеры наглядно демонстрируют способность резко сократить погрешности в оцениваемых импедансах уже во время калибровки по Тевенину акустического зонда путем применения комплексного, частотно-зависимого поправочного коэффициента к эталонным импедансам. Совершенно понятно, что применение конкретных поправочных функций, показанных выше, является всего лишь примером, и что объем настоящего раскрытия не ограничивается этим примером.
Что касается способа, описываемого в настоящем документе, соответственно следует понимать, что коррекция погрешностей, вносимых геометрическим несоответствием между акустическим зондом и любой нагрузкой, приложенной к нему, может быть исправлена в процессе калибровки путем минимизации погрешности калибровки. Тем самым моделируется отношение давления на микрофоне зонда к объемной скорости, вносимой зондом, а не импеданс плоской волны. Однако же последующие измерения импеданса уже учитывают эти эффекты и, таким образом, в них не вносятся поправки с помощью этого способа.
Таким образом в итоге способ включает в себя этапы:
- предоставления акустического зонда, предназначенного для использования при измерениях импеданса устройства, инструмента или другого интересующего объекта;
- предоставления набора волноводов с различиями в геометрии и с известным аналитическим импедансом и/или измеренным импедансом волновода
- вставку акустического зонда в каждый из волноводов, и для каждого из волноводов моделирование акустического импеданса, посредством чего к указанному смоделированному импедансу (обозначаемому также известным или аналитическим импедансом) добавляется комплексный поправочный коэффициент;
- использование смоделированного импеданса с поправочными коэффициентами для вычисления параметров Тевенина (т.е. на характеристики источника) акустического зонда, используемого для последующих измерений импеданса, где на каждом итерационном шаге нахождения поправочных коэффициентов для каждого волновода, параметры Тевенина вычисляются путем минимизации среднеквадратичной функции ошибки системы для того, чтобы найти набор поправочных коэффициентов, приводящих к самой низкой относительной погрешности калибровки;
- и последнее, при использовании указанной скорректированной калибровки по Тевенину, может быть измерен любой акустический импеданс, с точки зрения акустического датчика, что означает, что потенциальные эффекты затухающих колебаний и потери потока включены в это измерение.
Следует отметить, что первоначальное приближенная оценка для комплексного поправочного коэффициента может быть применена к модели с целью ускорения настройки калибровки.
Следует иметь в виду, ссылка на всем протяжении этого описания на «один из вариантов осуществления» или «вариант осуществления» или «аспект» или признаки, включенные в состав «может» означает, что конкретный признак, структура или характеристика, описанная в связи с вариантом осуществления, входит, по меньшей мере, в один из вариантов осуществления раскрытия. Кроме того, конкретные признаки, структуры или характеристики могут быть объединены как пригодные в один или несколько вариантов осуществления раскрытия. Предыдущее описание предоставлено для того, чтобы дать возможность любому специалисту в данной области практически реализовать различные аспекты, описываемые в настоящем документе. Различные модификации этих аспектов будут совершенно очевидны для специалистов в данной области техники, и основные принципы, определенные в настоящем документе, могут быть применены к другим аспектам.
Подразумевается, что формула изобретения не ограничивается аспектами, представленными в настоящем документе, но она должна быть предоставлена в полном объеме в соответствии с языком формулы изобретения, причем подразумевается, что ссылка на элемент в единственном числе не означает «один и только один», если это конкретно не указано, а скорее «один или несколько». Если не указано иное, термин «некоторые» относится к одному или нескольким.
Таким образом, объем должен быть оценен с точки зрения формулы изобретения, которая следует далее.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИЯ НА МЕСТЕ ПРИ АКУСТИЧЕСКИХ ИЗМЕРЕНИЯХ | 2017 |
|
RU2750093C2 |
| КОМПЕНСАЦИЯ КАЛИБРОВКИ МИКРОФОНА ПО ПЕРЕДАТОЧНОЙ ФУНКЦИИ СОЕДИНИТЕЛЯ | 2017 |
|
RU2730425C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДИЭЛЕКТРИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛЬНЫХ ТЕЛ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2331894C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ КАЛИБРОВКИ АКУСТИЧЕСКИХ ПРИЕМНИКОВ | 2004 |
|
RU2363022C2 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЙ АКУСТИЧЕСКОГО ИМПЕДАНСА СРЕДНЕГО УХА | 2014 |
|
RU2572156C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СОСТОЯНИЯ БАРАБАННОЙ ПЕРЕПОНКИ | 2014 |
|
RU2552099C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ В СКВАЖИНЕ | 2017 |
|
RU2733343C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ НАКОНЕЧНИКА УЛЬТРАЗВУКОВОГО ВОЛНОВОДА | 2015 |
|
RU2593444C1 |
| КОМПЛЕКТ УШНОГО ЗОНДА ДЛЯ ПРОВЕРКИ СЛУХА | 2017 |
|
RU2756248C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА ОСТАТКА ТВЕРДОГО НЕФТЕПРОДУКТА В ЖЕЛЕЗНОДОРОЖНОМ ВАГОНЕ-ЦИСТЕРНЕ | 2007 |
|
RU2348015C1 |


Изобретение относится к способу проведения акустической калибровки по Тевенину зондов или слуховых аппаратов. Способ включает в себя применение множества различных акустических нагрузок, по одной акустической нагрузке в конкретный момент времени, к выходу зонда или слухового аппарата, характеристики источника которого должны быть определены. Каждая из акустических нагрузок характеризуется известным акустическим входным импедансом и дополнительным частотно-зависимым комплексным поправочным коэффициентом ΔZ(f). Определяют соотношение между звуковым давлением и объемной скоростью на входе акустической нагрузки, создаваемой зондом для множества частот, получая таким образом, правильную характеристику источника зонда или слухового аппарата. Акустические нагрузки являются входными импедансами соответствующих волноводов или других подходящих полостей, и известные акустические входные импедансы определяются аналитически. Поправочные коэффициенты настраиваются в итерационном процессе отдельно для каждого волновода или полости, например, в итерационном процессе. Технический результат - повышение точности калибровки. 2 н. и 19 з.п. ф-лы, 4 ил.
1. Способ проведения акустической калибровки по Тевенину зондов или слуховых аппаратов, причем способ включает в себя этапы представления множества различных акустических нагрузок, по одной акустической нагрузке в конкретный момент времени, к выходу зонда или слухового аппарата;
причем каждая из указанных акустических нагрузок характеризуется известным акустическим входным импедансом и дополнительным частотно-зависимым комплексным поправочным коэффициентом ΔZ(f),
в результате чего соотношение между звуковым давлением и объемной скоростью на входе акустической нагрузки, создаваемой зондом, может быть определено для множества частот, получая, таким образом, по существу правильную характеристику источника зонда или слухового аппарата.
2. Способ по п. 1, в котором указанные нагрузки являются входными импедансами соответствующих волноводов.
3. Способ по п. 2, в котором указанные известные акустические импедансы определяются аналитически.
4. Способ по п. 3, в котором поправочные коэффициенты настраиваются в итерационном процессе отдельно для каждого волновода;
в результате чего получается минимально возможная погрешность и/или визуальное выравнивание графиков из-за небольших различий в установке зонда в акустическую нагрузку, приводящее к изменению поправочных коэффициентов для каждого волновода.
5. Способ по п. 4, в котором число итерационных шагов для того, чтобы погрешность сходилась к минимуму, уменьшается при применении начального значения для обоих поправочных коэффициентов, равного ожидаемому значению для конкретной комбинации зонда и волновода, полученного из предыдущей калибровки.
6. Способ по п. 5, в котором указанный частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:

где:

7. Способ по п. 1, в котором указанные известные акустические импедансы определяются аналитически.
8. Способ по п. 7, в котором поправочные коэффициенты настраиваются в итерационном процессе отдельно для каждого волновода;
в результате чего получается минимально возможная погрешность и/или визуальное выравнивание графиков из-за небольших различий в установке зонда в акустическую нагрузку, приводящее к изменению поправочных коэффициентов для каждого волновода.
9. Способ по п. 8, в котором число итерационных шагов для того, чтобы погрешность сходилась к минимуму, уменьшается при применении начального значения для обоих поправочных коэффициентов, равного ожидаемому значению для конкретной комбинации зонда и волновода, полученного из предыдущей калибровки.
10. Способ по п. 9, в котором указанный частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:
где:
11. Способ по п. 2, в котором поправочные коэффициенты настраиваются в итерационном процессе отдельно для каждого волновода;
в результате чего получается минимально возможная погрешность и/или визуальное выравнивание графиков из-за небольших различий в установке зонда в акустическую нагрузку, приводящее к изменению поправочных коэффициентов для каждого волновода.
12. Способ по п. 11, в котором число итерационных шагов для того, чтобы погрешность сходилась к минимуму, уменьшается при применении начального значения для обоих поправочных коэффициентов, равного ожидаемому значению для конкретной комбинации зонда и волновода, полученного из предыдущей калибровки.
13. Способ по п. 12, в котором указанный частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:
где:
14. Способ по п. 1, в котором поправочные коэффициенты настраиваются в итерационном процессе отдельно для каждого волновода;
в результате чего получается минимально возможная погрешность и/или визуальное выравнивание графиков из-за небольших различий в установке зонда в акустическую нагрузку, приводящее к изменению поправочных коэффициентов для каждого волновода.
15. Способ по п. 14, в котором число итерационных шагов для того, чтобы погрешность сходилась к минимуму, уменьшается при применении начального значения для обоих поправочных коэффициентов, равного ожидаемому значению для конкретной комбинации зонда и волновода, полученного из предыдущей калибровки.
16. Способ по п. 15, в котором указанный частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:
где:
17. Способ по п. 2, в котором указанный частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:
где:
18. Способ по п. 1, в котором указанный частотно-зависимый комплексный поправочный коэффициент ΔZ(f) определяется выражением:
где:
19. Полость для акустической калибровки по Тевенину диагностических зондов и слуховых аппаратов, причем полость снабжена держателем (8) зонда, выполненным с возможностью присоединения средства звукового вывода акустического зонда или слухового аппарата к полости;
причем акустический входной импеданс, если смотреть со стороны средства звукового вывода из акустического зонда, представляет собой сочетание известного акустического входного импеданса и дополнительного частотно-зависимого комплексного поправочного коэффициента ΔZ(f), который определяется выражением:
20. Полость по п. 19, причем указанная внутренняя полость представляет собой волновод (1), содержащий участок (2) корпуса, содержащий внутренний по существу цилиндрический канал (3) заданной длины и заданного диаметра, этот канал (3) на первом продольном конце (5) оканчивается по существу акустически жесткой пластиной (6) и на противоположном втором продольном конце (4) снабжен держателем (8) зонда, выполненным с возможностью присоединения средства звукового вывода зонда ко второму продольному концу (4) канала (3).
21. Полость по п. 19 или 20, причем указанный частотно-зависимый комплексный поправочный коэффициент определяется выражением:
где Cre и Cim - действительные постоянные, f - частота и i - мнимая единица.
| WO 1997020501 A2, 12.06.1997 | |||
| FLETCHER N H ET AL, "Acoustic impedance measurements-correction for probe geometry mismatch", THE JOURNAL OF THE ACOUSTICAL SOCIETY OF AMERICA, AMERICAN INSTITUTE OF PHYSICS FOR THE ACOUSTICAL SOCIETY OF AMERICA, NEW YORK, NY, US, (2005), vol | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| DE 19781937 T1, 28.10.1999 | |||
| WO 2013075255 A1, 30.05.2013 | |||
| WO | |||

