Изобретение относится к области оптических измерений, преимущественно при проведении полигонных испытаний на местности, и может быть использовано для калибровки оптических измерительных средств, а также для осуществления ориентирования подвижных объектов, оснащенных системой технического зрения.
Уровень техники
Для калибровки оптических измерительных средств применяются различные виды калибровочных объектов, в том числе, особенно при работе на открытой местности на полигонах, калибровочные вехи, содержащие легко распознаваемое на фоне местности контрастное изображение. Для осуществления калибровки камеры оптического измерительного средства в вычислительное устройство вводится информация о координатах калибровочных вех на местности и координаты их изображений в кадре. При этом указание на положение калибровочного объекта (вехи) в кадре необходимо осуществить оператором вручную, и вручную ввести или выбрать из списка его координаты, что вызывает затруднения в идентификации при наличии нескольких идентичных изображений калибровочных объектов в кадре - в сопоставлении измеренных координат объектов на местности и конкретного изображения вехи в кадре, и, как следствие, увеличение времени на калибровку измерительного средства, увеличение вероятности ошибки и нагрузки на оператора.
В технике известны различные виды меток, размещаемых на предметах, и содержащих закодированную различными способами информацию, связанную или не связанную с данным объектом. Информация с данных меток может быть считана в радиодиапазоне (RFID-метки) или в оптическом диапазоне. Различные виды меток оптического диапазона (маркеров) используются, в частности, в системах дополненной реальности [1]. В основном в приложениях дополненной реальности используются два типа маркеров - шаблонные маркеры и маркеры с двухмерным (матричным) штрихкодом, соответственно идентификация маркеров первого типа осуществляется методом нахождения соответствия некоторому шаблону, хранящемуся в базе данных, а маркеров второго типа - методом декодирования. Шаблонные маркеры обычно представляют собой простые черно-белые изображения, размещенные внутри квадрата с границей черного цвета (фиг. 1).
Разработано значительное количество матричных кодов (Aztech Code, Data Matrix, Maxi Code, PDF417, QR Code, Microsoft Tag и другие), некоторые из которых стандартизированы [2]. В некоторых из них используются только черный и белый цвета, в других дополнительная информация закодирована с помощью цвета.
Недостатком известных видов маркеров является то, что их применение для идентификации объектов, расположенных на значительном (от сотен метров до нескольких километров) расстоянии от видеофотокамеры, практически невозможно, поскольку из-за ограниченного разрешения фотоприемной матрицы элементы изображения метки сливаются, и записанный в метке код становится крайне затруднительно или невозможно распознать.
Цель изобретения - снижение времени на калибровку оптических измерительных средств и снижение вероятности ошибок при калибровке за счет автоматизации идентификации калибровочных объектов, изображения которых находятся в кадре.
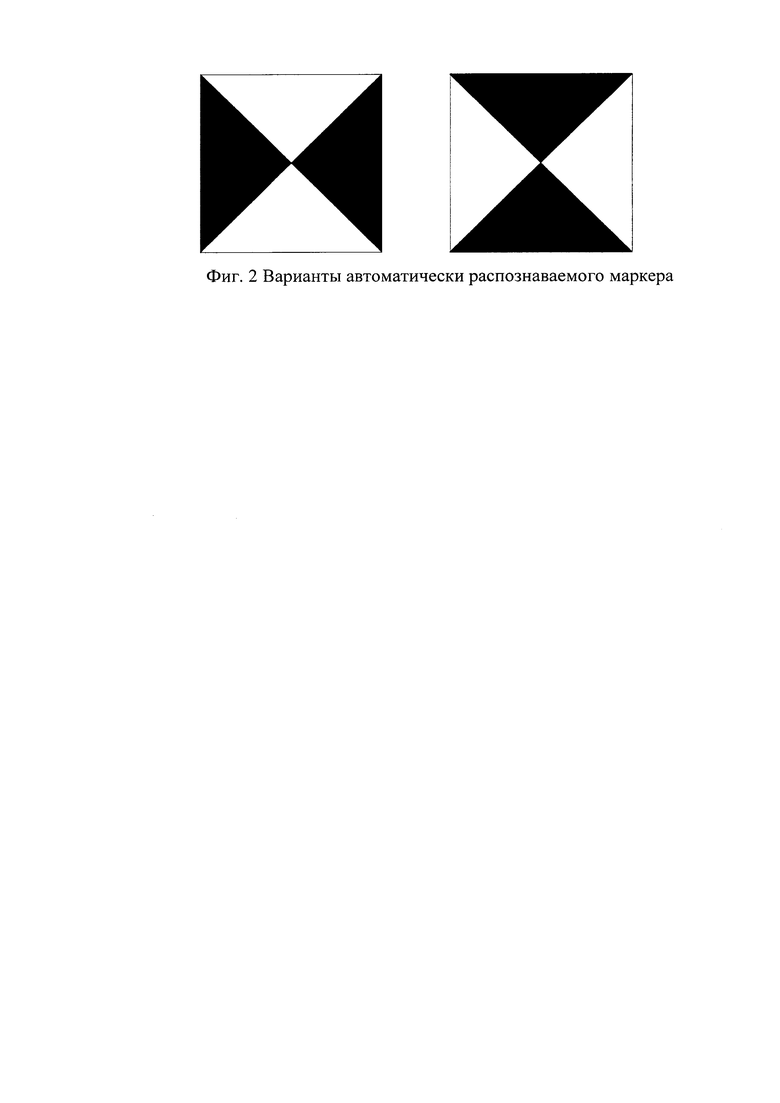
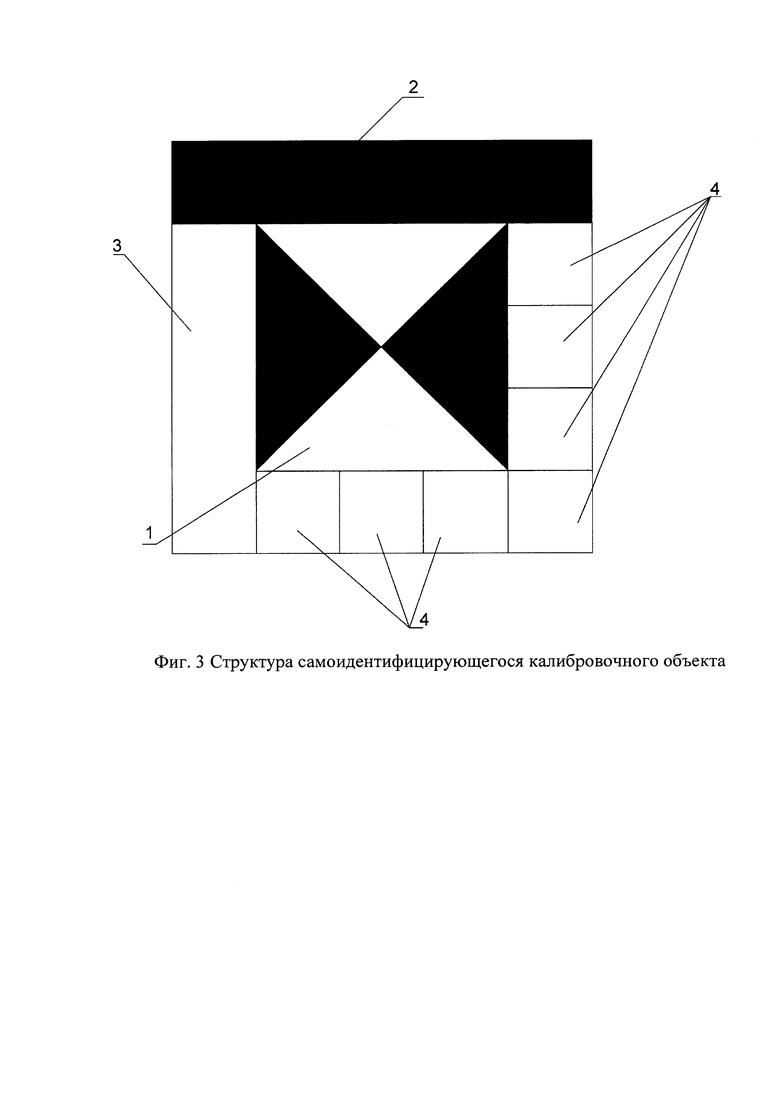
Поставленная цель достигается тем, что в конструкцию калибровочного объекта включаются область распознавания 1, содержащая автоматически распознаваемый маркер характерного вида (фиг. 2), горизонтальная 2 и вертикальная 3 области ограничения, позволяющие определить границы области распознавания, и область кода, состоящая из нескольких элементов 4, позволяющая закодировать идентификатор (номер) калибровочного объекта (вехи) двоичным кодом, с возможностью считывания и декодирования на изображениях низкого разрешения и контраста, характерных для съемки калибровочных объектов с большого расстояния в полевых условиях (фиг. 3).
Размер стороны квадратного элемента области кодирования выбирается в зависимости от предполагаемых условий съемки таким образом, чтобы гарантировать надежное распознавание кода, предпочтительно от 1/2 до 1/5 размера стороны автоматически распознаваемого маркера. Может применяться структура калибровочного объекта, симметричная описываемой и приводимой на фиг. 2, 3.
В зависимости от предполагаемых условий применения (в помещении или на улице), дальности от камеры, освещения калибровочный объект может изготавливаться различного размера, из фанеры, дерева, металла, пластика и других материалов с нанесением изображения черной и белой краской, распечатываться на бумаге или других материалах с помощью печатающих устройств.
Самоидентифицирующийся плоский калибровочный объект используется следующим образом. Вначале на изображении (снимке) с помощью алгоритма (например, по шаблону) обнаруживается автоматически распознаваемый маркер, находящий в области распознавания (фиг. 2). Из изображения вырезается область, гарантированно полностью содержащая калибровочный объект (например, в 2-3 раза большая, чем обнаруженный маркер). Изображение вырезанной области бинаризуется, после чего на нем детектируются границы. На полученном изображении с помощью преобразования Хафа обнаруживаются диагональные линии и вычисляются координаты точки их пересечения - точные координаты центра калибровочного объекта. Затем обнаруживаются горизонтальная линия выше центра и вертикальная линия левее центра и вычисляются координаты точек их пересечения с ранее обнаруженными диагональными линиями - левого нижнего, левого верхнего и правого верхнего углов маркера. По полученным координатам вычисляется размер маркера на изображении и границы области кодирования, расположение которой относительно маркера и размер которой относительно размера маркера известны. Далее вырезаются две прямоугольные области исходного изображения, содержащие только элементы области кодирования (снизу от маркера и справа от маркера), данные изображения бинаризуются и сегментируются на квадраты, соответствующие элементам области кодирования. По преимущественной интенсивности для каждого сегмента определяется значение соответствующего бита кода, например - низкая интенсивность соответствует единице, высокая - нулю, или наоборот. Из полученных битов формируется код, соответствующий изображению калибровочного объекта. В целях повышения надежности декодирования может применяться помехоустойчивое кодирование.
Применение самоидентифицирущихся калибровочных объектов позволить уменьшить время, необходимое для калибровки оптических измерительных средств, и снизить количество ошибок при подготовке и обработке измерений с помощью оптических измерительных средств и комплексов.
Список использованных источников
1. Vadim Beglov. Object information based on marker recognition. University of Eastern Finland Department of Computer Science. Master's Thesis.
2. ГОСТ P ИСО/МЭК 18004-2015. Информационные технологии. Технологии автоматической идентификации и сбора данных. Спецификация символики штрихового кода QR Code. М.: Стандартинформ, 2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОРМИРОВАНИЕ, ФИКСАЦИЯ И ИСПОЛЬЗОВАНИЕ МЕТОК ВИЗУАЛЬНОЙ ИДЕНТИФИКАЦИИ ДЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2596997C2 |
| Способ кодирования цифровой информации в виде многомерного нанобар-кода | 2020 |
|
RU2777708C2 |
| СПОСОБ АНАЛИЗА ИММУНОЛОГИЧЕСКОЙ ПРОБЫ | 2008 |
|
RU2477488C2 |
| УСТРОЙСТВО СКАНИРОВАНИЯ ДЛЯ ДЕКОДИРОВАНИЯ ОПТИЧЕСКИ СЧИТЫВАЕМОЙ ЭТИКЕТКИ И ОПТИЧЕСКИ СЧИТЫВАЕМАЯ ЭТИКЕТКА ДЛЯ ТАКОГО УСТРОЙСТВА | 1989 |
|
RU2081453C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ ДЛЯ ДЕКОДИРОВАНИЯ ОПТИЧЕСКИ СЧИТЫВАЕМОЙ ЭТИКЕТКИ И ОПТИЧЕСКИ СЧИТЫВАЕМАЯ ЭТИКЕТКА ДЛЯ ТАКОГО УСТРОЙСТВА | 1989 |
|
RU2078375C1 |
| Способ формирования и декодирования двумерного кода носителя информации | 2023 |
|
RU2823438C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТЕРЕОСКОПИЧЕСКИЙ ДАЛЬНОМЕР | 2014 |
|
RU2579532C2 |
| Способ автоматической калибровки датчиков машинного зрения рельсового транспортного средства | 2023 |
|
RU2811766C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ТОЧКИ ВЗГЛЯДА НАБЛЮДАТЕЛЯ | 2011 |
|
RU2565482C2 |
| СПОСОБ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ЦИФРОВОЙ ИНФОРМАЦИИ В ВИДЕ УЛЬТРАСЖАТОГО НАНОБАР-КОДА (ВАРИАНТЫ) | 2013 |
|
RU2656734C2 |
Изобретение относится к области оптических измерений. Технический результат заключается в расширении арсенала средств. Самоидентифицирующийся плоский калибровочный объект для измерительных средств оптического диапазона, инвариантный к операции масштабирования, состоящий из находящейся в центре объекта квадратной области распознавания, разделенной двумя диагоналями на четыре треугольника, два черного и два белого цвета, расположенных поочередно, отличающийся тем, что область распознавания предназначена для определения координат центра калибровочного объекта для определения размера маркера и границы области кодирования, состоящей из двух полос, расположенных напротив двух полос области ограничения относительно квадрата области распознавания, и разделенных на квадратные зоны черного и белого цвета, предназначенных для кодирования двоичным кодом идентификатора-номера данного калибровочного объекта, и использующегося для автоматического декодирования идентификатора калибровочного объекта. 3 ил.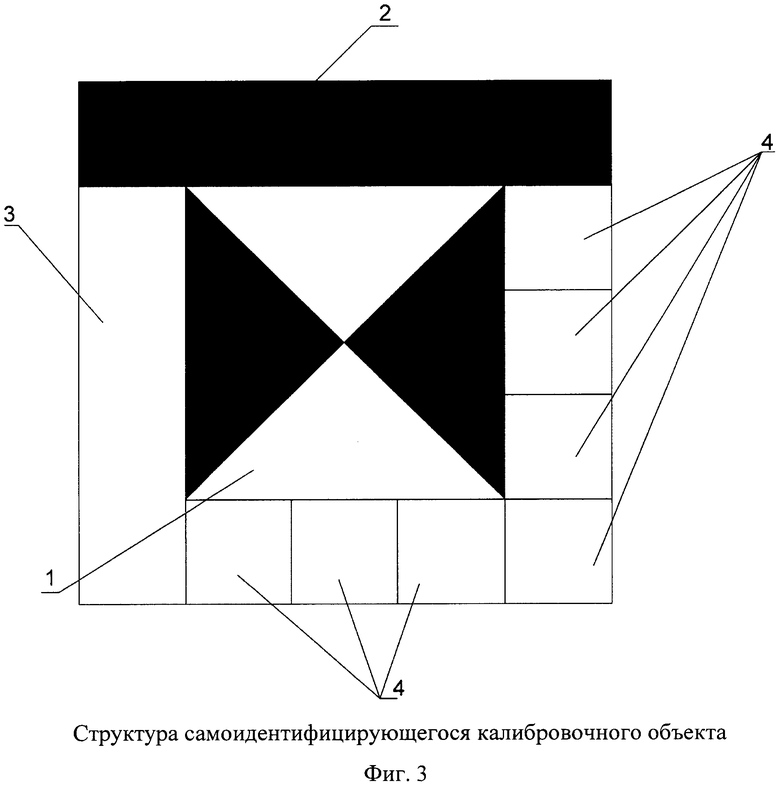
Самоидентифицирующийся плоский калибровочный объект для измерительных средств оптического диапазона, инвариантный к операции масштабирования, состоящий из находящейся в центре объекта квадратной области распознавания, разделенной двумя диагоналями на четыре треугольника, два черного и два белого цвета, расположенных поочередно, отличающийся тем, что область распознавания предназначена для определения координат центра калибровочного объекта путем обнаружения точки пересечения его диагоналей, имеет область ограничения, состоящую из двух полос, одной черного и другой белого цвета, расположенных вдоль двух смежных сторон квадрата области распознавания, предназначенную для обнаружения горизонтальной линии выше центра и вертикальной линии левее центра и определения координат точек пересечения их с диагоналями калибровочного объекта, по которым определяют размер маркера и границы области кодирования, состоящей из двух полос, расположенных напротив двух полос области ограничения относительно квадрата области распознавания, и разделенных на квадратные зоны черного и белого цвета, предназначенных для кодирования двоичным кодом идентификатора-номера данного калибровочного объекта, и использующегося для автоматического декодирования идентификатора калибровочного объекта.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2002 |
|
RU2262713C2 |
| US 6459425 B1, 01.10.2002 | |||
| Способ высокоточной калибровки дисторсии цифровых видеоканалов | 2018 |
|
RU2682588C1 |

