Изобретение относится к оптико-электронному приборостроению, а именно к способам контроля оптических характеристик и показателей качества изображения, и может быть использовано для высокоточной аттестации и калибровки цифровых видеоканалов, представляющих собой связку объектива и матричного приемника изображения.
Известен способ калибровки радиальной дисторсии, изложенный в патенте РФ №2289111 [1]. Способ состоит в том, что испытуемым видеоканалом снимается любая рабочая сцена, изображение которой вводится в ЭВМ и бинаризируется с выделением контуров, после чего выбирается калибровочный объект из объектов рабочей сцены и определяются координаты центральной точки калибровочного объекта. Далее видеоканал позиционируется в n разных направлениях наблюдения, определяются координаты центральной точки калибровочного объекта на изображении для n разных направлений наблюдения и определяются коэффициенты радиальной дисторсии. Недостатком этого способа является зависимость точности его результатов от точности устройства позиционирования видеоканала, что исключает возможность его использования, например, для калибровки видеоканалов угломерных измерительных приборов.
Наиболее близким является способ калибровки дисторсии оптико-электронного устройства, представленный в патенте РФ №2321888 [2]. Способ заключается в следующем: устанавливают оптико-электронное устройство с возможностью перемещения вдоль оси на фиксированную величину и получения в каждом из зафиксированных положений изображения, измеряют в каждом из зафиксированных положений оптико-электронного устройства реальные координаты одной и той же контрольной точки получаемого изображения, по полученным координатам вычисляют коэффициенты радиальной и тангенциальной дисторсии, вычисляют истинные координаты точек искаженного изображения на основе реальных координат этих точек и полученных коэффициентов дисторсии.
Недостатки этого способа заключаются в том, что он пригоден только для работы с объектами, расположенными на конечном расстоянии от видеоканала, а его точность зависит от точности устройства ориентирования видеоканала в заданных позициях.
Задачей изобретения является создание способа высокоточного измерения дисторсии видеоканалов, предназначенных для наблюдения удаленных на бесконечность объектов, не зависящего от точности устройств позиционирования и пригодного для калибровки видеоканалов угломерных приборов.
Технический результат - создание лабораторного способа высокоточного измерения дисторсии видеоканалов, одновременно обеспечивающего определение положения оптической оси видеоканала и его фокусного расстояния.
Для решения поставленной задачи, как и в известном способе, исследуемый видеоканал позиционируется перед тест-объектом, строит его изображение, после чего по результатам обработки изображения на ЭВМ вычисляются коэффициенты дисторсии. В отличие от известного способа, тест-объект в предлагаемом изобретении проецируется с помощью коллиматора в бесконечность. При этом тест-объект представляет собой точку, и может быть сформирован с помощью подсвеченной точечной диафрагмы, либо точечного источника света, установленного в фокальной плоскости коллиматора. В параллельный пучок лучей между объективами коллиматора и исследуемого видеоканала помещается воздушно-зеркальный клин (ВЗК), представляющий собой две установленные под углом α друг относительно друга плоскопараллельные стеклянные пластины, на внутренние поверхности которых нанесено отражающее покрытие с коэффициентом отражения 0,85 в рабочей области спектра. В описанной схеме ВЗК формирует веер эквидистантных коллимированных пучков с угловым расстоянием между соседними пучками равным удвоенному углу клина. На приемнике изображения видеоканала веер изображается как цепь фокальных пятен (ЦФП). Фокальное пятно, соответствующее неотклоненному клином пучку, располагается вблизи точки пересечения оптической оси объектива и плоскости приемника изображения. При повороте видеоканала или ВЗК вокруг оси ориентация ЦФП в кадре изменяется. Таким образом, выполняется съемка нескольких кадров для равномерного заполнения поля зрения видеоканала ЦФП. Применение именно ВЗК как источника веера эквидистантных пучков лучей позволяет использовать для калибровки каналов как монохроматические, так и широкополосные источники света.
Изобретение поясняется чертежами.
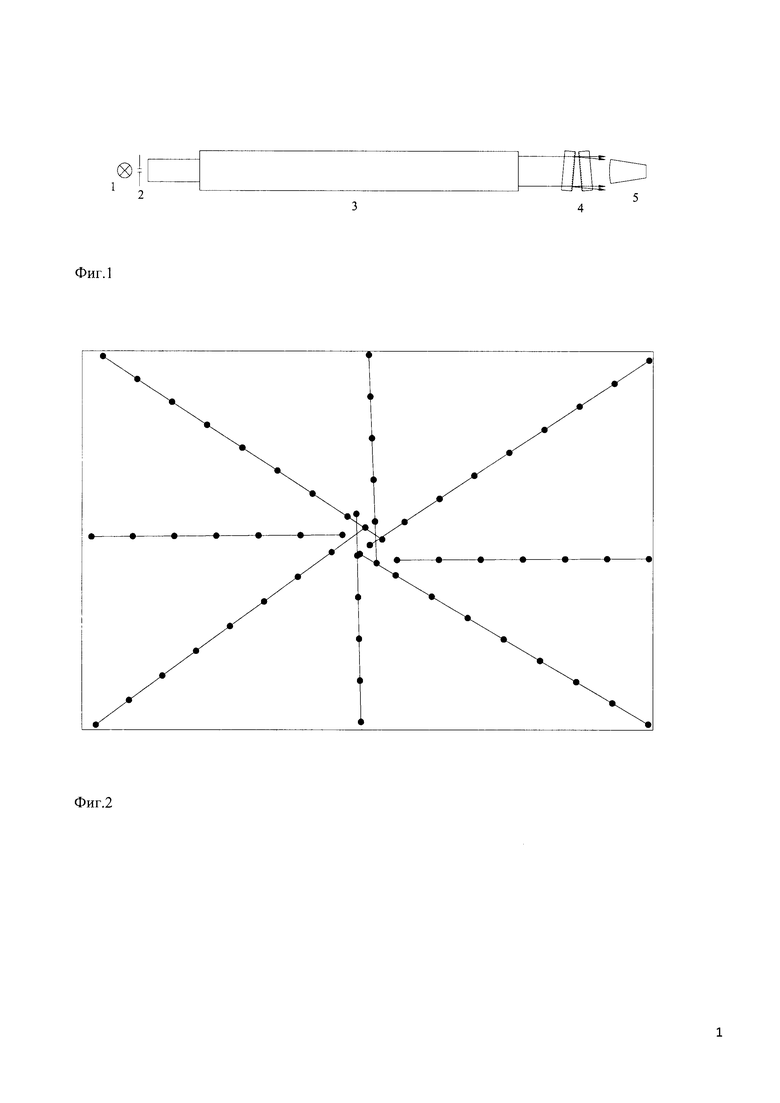
На фиг. 1 представлена схема лабораторной измерительной установки для измерения дисторсии видеоканалов.
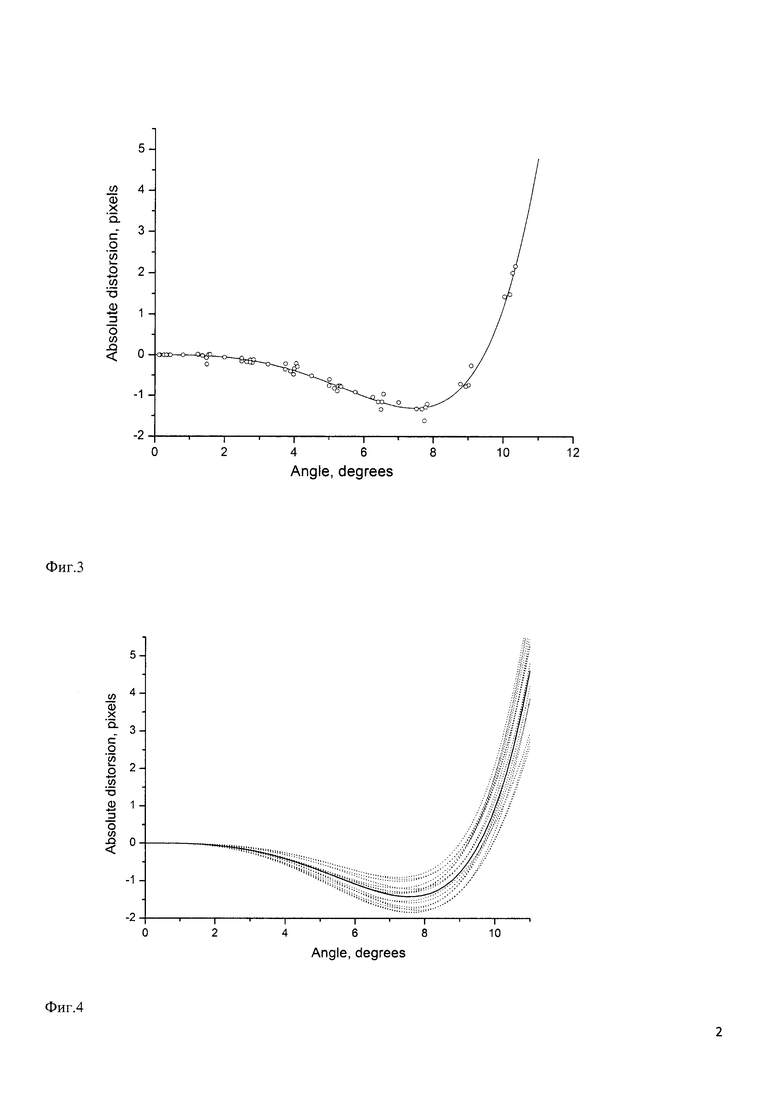
На фиг. 2 показан пример заполнения поля зрения видеоканала ЦФП. Фокальные пятна каждой из ЦФП соединены прямой линией для наглядности.
На фиг. 3 представлена рассчитанная по результатам измерений калибровочная функция видеоканала (функция дисторсии, сплошная линия). Кружками показаны положения фокальных пятен отдельных ЦФП.
На фиг. 4 представлена расчетная функция дисторсии объектива (сплошная линия). Пунктирными линиями показаны калибровочные функции для 15 исследованных видеоканалов.
Сущность предлагаемого изобретения состоит в том, что исследуемый видеоканал 5 (фиг. 1) закрепляется на поворотном суппорте оптической скамьи перед коллиматором (3), в фокальной плоскости которого установлена точечная диафрагма (2), подсвеченная источником света (1), или точечный источник света. В параллельном пучке лучей между исследуемым видеоканалом и объективом коллиматора помещается ВЗК (4), который формирует веер эквидистантных коллимированных пучков с угловым расстоянием между соседними пучками равным удвоенному углу клина. На приемнике изображения видеоканала веер изображается как ЦФП. Фокальное пятно, соответствующее неотклоненному клином пучку, располагается вблизи ожидаемой точки пересечения оптической оси объектива и плоскости приемника изображения. При повороте видеоканала или ВЗК вокруг оси ориентация ЦФП в кадре изменяется. Таким образом, выполняется съемка нескольких кадров для равномерного заполнения поля зрения фотоэлектронной камеры ЦФП. Для калибровки видеоканала при последующей обработке отснятых кадров вычисляются пиксельные координаты энергетических центров тяжести фокальных пятен для каждого кадра. Также методом наименьших квадратичных отклонений вычисляется угол наклона ЦФП в кадре γ относительно оси X (горизонтальной оси) матрицы приемника изображения. Для описания радиальной дисторсии используется модель дисторсии седьмого порядка. Для матричного приемника изображения в «пиксельных» единицах измерения эта модель может быть записана в следующем виде:

где Nd - измеренное (искаженное) расстояние от центра тяжести фокального пятна до оси камеры, Nu - неискаженное положение фокального пятна, K3, K5, K7 - коэффициенты дисторсии третьего, пятого и седьмого порядка, соответственно.
Измеренное расстояние связано с параметрами видеоканала следующим соотношением:
где Xm, Ym - измеренные значения пиксельных координат центра тяжести данного фокального пятна, Хс, Yc - пиксельные координаты оси видеоканала.
Неискаженное положение фокального пятна Nu связано с параметрами видеоканала следующим соотношением:
Где F - фокусное расстояние видеоканала, θ - угол между осью объектива и осью данного пучка веера, dpix - размер пикселя.
Так как искажения, вносимые дисторсией, для неотклоненного ВЗК пучка веера (первого пучка) пренебрежимо малы, угол θ0 между осью объектива и осью этого пучка связан с координатами центра тяжести пятна и параметрами видеоканала, следующими соотношениями:
где Xd0, Yd0 - измеренные значения пиксельных координат центра тяжести фокального пятна для неотклоненного ВЗК пучка веера.
Система координат видеоканала определяется следующим образом: ось X видеоканала параллельна оси X матрицы, ось Y видеоканала параллельна оси Y матрицы, ось Z видеоканала совпадает с осью симметрии объектива (осью радиальной дисторсии). Единичный вектор направления оси j-го пучка веера в системе координат видеоканала определяется по формуле:
где γ - угол наклона ЦФП в кадре относительно оси X матрицы, ψ - угол между первым пучком веера и проекцией оси фотоэлектронной камеры на плоскость веера пучков, ϕ - угол между осью видеоканала (осью объектива) и плоскостью веера.
Углы ориентации веера относительно системы координат камеры (ψ и ϕ) связаны с координатами первого пучка веера и ориентацией ЦФП в кадре следующими соотношениями:

Угол между осью j-го пучка веера и осью видеоканала определяется выражением:
Для нахождения параметров камеры и коэффициентов дисторсии методом Левенберга-Марквардта решается задача оптимизации для уравнения дисторсии 7-го порядка для каждого фокального пятна из каждого кадра с записью ЦФП с учетом взаимосвязи величин, описываемой выражениями (1-9). При этом определяются наиболее вероятные значения следующих параметров: фокусного расстояния камеры F, пиксельных координат оси видеоканала Xc, Yc (оси симметрии функции дисторсии) и коэффициентов дисторсии третьего, пятого и седьмого порядка K3, K5, K7.
Таким образом, предлагаемый способ измерения дисторсии видеоканалов основан на высокоточном измерении положений сфокусированных видеоканалом фокальных пятен на матричном приемнике изображения параллельных эквидистантных пучков лучей. Точность способа определяется, в первую очередь, ВЗК, который является источником веера пучков лучей, угловые расстояния между которыми с высокой точностью равны удвоенному углу клина между стеклянными пластинами ВЗК. Соответственно, точность способа не зависит от точности устройств позиционирования, а основной вклад в ошибку измерения дисторсии вносят погрешности изготовления отдельных пластин ВЗК (в первую очередь, отступление от плоскости поверхностей), погрешность определения угла между пластинами, а также неперпендикулярность угла между ребром ВЗК и осью падающего на него коллимированного пучка. Эти погрешности достаточно просто минимизировать до приемлемого уровня. Остаточные деформации плоскостей пластин вызывают нарушение плоскостности падающего на ВЗК волнового фронта, сформированного коллиматором. При многократном отражении от зеркальных поверхностей ВЗК искажения волнового фронта пучков веера, вносимые из-за неидеальности этих поверхностей, накапливаются (практически складываются). Для исключения влияния этих ошибок, при последующей обработке отснятых кадров достаточно вычислить пиксельные координаты энергетических центров тяжести фокальных пятен ЦФП для каждого кадра. Угол между пластинами ВЗК может быть измерен с точностью до 0,5'' с помощью гониометра. Для того чтобы угол между соседними пучками веера отличался от величины 2α не более, чем на величину δϕ, отклонение угла между ребром клина и осью падающего на ВЗК пучка от 90° должно быть не более чем  . При δϕ=0,1'' и α=40' допустимое отклонение ребра ВЗК от перпендикулярности оси падающего пучка составляет 22'. Следовательно, при настройке схемы измерения дисторсии видеоканалов, ребро ВЗК необходимо установить перпендикулярно оси падающего на него коллимированного пучка. С помощью автоколлиматора это можно выполнить с точностью лучше, чем 10''.
. При δϕ=0,1'' и α=40' допустимое отклонение ребра ВЗК от перпендикулярности оси падающего пучка составляет 22'. Следовательно, при настройке схемы измерения дисторсии видеоканалов, ребро ВЗК необходимо установить перпендикулярно оси падающего на него коллимированного пучка. С помощью автоколлиматора это можно выполнить с точностью лучше, чем 10''.
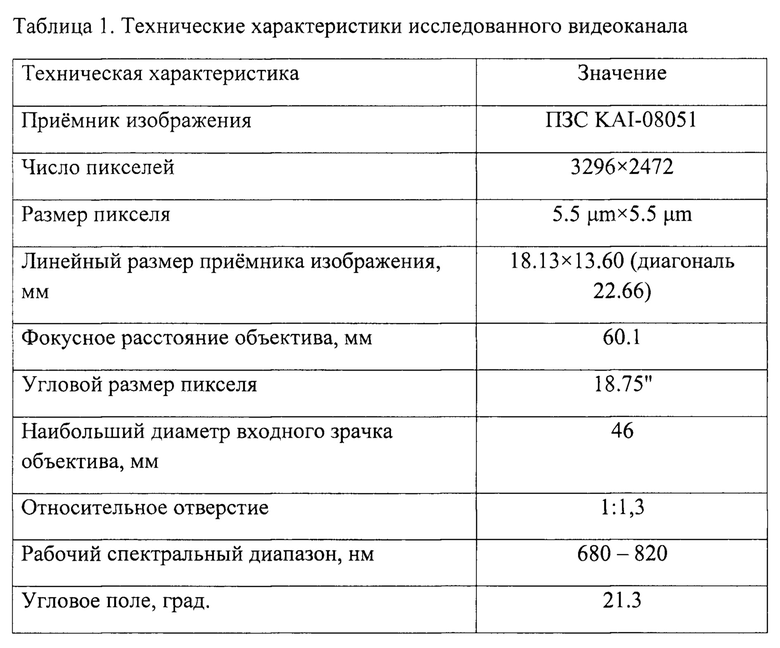
Экспериментальные измерения дисторсии согласно предлагаемому способу были проведены на видеоканалах угломерного измерительного прибора. В видеоканалах был применен объектив, обеспечивающий равномерное качество изображения по всему полю видеоканала, включая углы кадра. Технические характеристики видеоканала, включая характеристики приемника изображения, приведены в таблице 1. Объектив отличается высоким уровнем коррекции дисторсии, которая даже в углах кадра составляет менее 0,3%, а разница между параксиальным и реальным положением изображения точки нигде не превышает 20 мкм (на большей части поля ее значение находится в пределах от 0 до 8 мкм). Это меньше или сравнимо с размером единичного пикселя приемника изображения видеоканала, который равен 5,5 мкм. На фиг. 4 сплошной линией показана расчетная кривая дисторсии и калибровочные кривые измеренной дисторсии пятнадцати исследованных видеоканалов.
Таким образом, предложенный способ позволяет измерять дисторсию с точностью лучшей, чем размер единичного пикселя исследуемого видеоканала, а также дополнительно определять фокусное расстояние видеоканала и положение оптической оси на приемнике изображения. Использование именно воздушно-зеркального клина как источника веера эквидистантных пучков лучей дает возможность применять для исследования каналов как монохроматические, так и широкополосные источники света и позволяет минимизировать вклад ошибок настройки и изготовления лабораторного оборудования в итоговый результат калибровки видеоканала.
Источники информации
1. №2289111 http://www.freepatent.ru/patents/2289111 - аналог.
2. №2321888 http://www.freepatent.ru/patents/2321888 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| Способ количественной оценки неоднородностей в прозрачных средах | 1973 |
|
SU494722A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2004 |
|
RU2263421C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПРИ ПОМОЩИ КАМЕРЫ (ВАРИАНТЫ) | 2014 |
|
RU2602729C2 |
| Устройство для дистанционного измерения угловых отклонений объекта | 1988 |
|
SU1566206A1 |
| Оптическая система линейного развертывающего устройства | 1990 |
|
SU1784937A1 |
| АВТОКОЛЛИМАЦИОННЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2002 |
|
RU2242097C2 |
| Способ фотограмметрической калибровки для оценки коэффициентов радиальной и тангенциальной дисторсии объектива и матрицы внутренних параметров камеры | 2023 |
|
RU2808083C1 |
Способ калибровки дисторсии видеоканала, содержащего объектив и матричный приемник изображения, в котором видеоканал закрепляют перед коллиматором, в параллельном пучке между видеоканалом и объективом коллиматора помещают воздушно-зеркальный клин (ВЗК), который формирует веер эквидистантных коллимированных пучков с угловым расстоянием между соседними пучками, равным удвоенному углу клина. На приемнике изображения видеоканала веер изображается как цепь фокальных пятен (ЦФП). Поворотом видеоканала или ВЗК вокруг оси ориентация ЦФП в кадре последовательно изменяется, выполняется съемка нескольких кадров для равномерного заполнения поля зрения видеоканала ЦФП, после чего для калибровки видеоканала при обработке кадров определяются наиболее вероятные значения фокусного расстояния, пиксельных координат оси видеоканала и коэффициентов дисторсии третьего, пятого и седьмого порядка. Технический результат – обеспечение высокоточного измерения дисторсии видеоканалов с одновременным определением положения оптической оси видеоканала и его фокусного расстояния. 4 ил., 1 табл.
Способ калибровки дисторсии видеоканала, содержащего связанные между собой объектив и матричный приемник изображения, включающий определение коэффициентов дисторсии, отличающийся тем, что исследуемый видеоканал закрепляется на поворотном суппорте оптической скамьи перед коллиматором, в фокальной плоскости которого установлена точечная диафрагма, подсвеченная источником света, или точечный источник света, в параллельном пучке лучей между исследуемым видеоканалом и объективом коллиматора помещается воздушно-зеркальный клин (ВЗК), который формирует веер эквидистантных коллимированных пучков с угловым расстоянием между соседними пучками, равным удвоенному углу клина, на приемнике изображения видеоканала веер изображается как цепь фокальных пятен (ЦФП), фокальное пятно, соответствующее неотклоненному клином пучку, располагается вблизи ожидаемой точки пересечения оптической оси объектива и плоскости приемника изображения, поворотом видеоканала или ВЗК вокруг оси ориентация ЦФП в кадре последовательно изменяется, выполняется съемка нескольких кадров для равномерного заполнения поля зрения видеоканала ЦФП, после чего для калибровки видеоканала при последующей обработке отснятых кадров определяются наиболее вероятные значения следующих параметров: фокусного расстояния F, пиксельных координат оси видеоканала Xc, Yc и коэффициентов дисторсии третьего, пятого и седьмого порядка K3, K5, K7.
| СПОСОБ КАЛИБРОВКИ ДИСТОРСИИ ОПТИКО-ЭЛЕКТРОННОГО УСТРОЙСТВА | 2006 |
|
RU2321888C1 |
| СПОСОБ АДАПТИВНОЙ КАЛИБРОВКИ РАДИАЛЬНОЙ ДИСТОРСИИ ОПТИЧЕСКОЙ ПОДСИСТЕМЫ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2004 |
|
RU2289111C2 |
| US 2011134254 A1, 09.06.2011 | |||
| US 2010045700 A1, 25.02.2010 | |||
| МЕТОД ИНТЕРФЕРОМЕТРИЧЕСКОГО КОНТРОЛЯ НА РАБОЧЕЙ ДЛИНЕ ВОЛНЫ КАЧЕСТВА ИЗОБРАЖЕНИЯ И ДИСТОРСИИ ОПТИЧЕСКИХ СИСТЕМ | 2012 |
|
RU2491525C1 |

