Изобретение относится к области авиационной техники и предназначено для использования в бортовых системах сбора, регистрации и контроля параметров летательных аппаратов с использованием беспроводной технологии передачи полетной информации, преимущественно для контроля параметров авиационного газотурбинного двигателя и его электронного и электрического оборудования.
Известна интегрированная система сбора, контроля, обработки и регистрации полетной информации по патенту RU №2530701 [МПК G06F 7/00, B64D 47/00, опубл. 10.10.2014], содержащая комбинированный блок сбора полетных данных для получения информации от самолетных систем и оборудования, коммутируемую бортовую сеть связи, многоцелевые защищенные бортовые накопители параметрической, звуковой и визуальной информации, блок беспроводной передачи данных и др.
Перечень параметрических данных, регистрируемых многоцелевыми накопителями, соответствует действующим нормативным требованиям и включает параметры, характеризующие движение самолета, состояние систем и оборудования самолета, а также параметры силовой установки (двигателя), служебные параметры (номер самолета, дата полета и т.д.).
Из описания аналога RU №2530701 [МПК G06F 7/00, B64D 47/00, опубл. 10.10.2014] следует, что электропитание комбинированного блока сбора полетных данных осуществляется от неотключаемых шин системы электроснабжения постоянного тока с напряжением 28 В, при этом электропитание бортовых накопителей осуществляется от сети постоянного тока через устройства бесперебойного электрического питания. Данные эксплуатационного накопителя могут передаваться по каналам сотовой связи или интерфейс стандарта группы IEEE 802.11 (Wi-Fi) через блок беспроводной передачи данных для наземной обработки после завершения полета.
Основными недостатками данного аналога являются:
- ограниченный перечень регистрируемых параметров авиационного газотурбинного двигателя (двигателя). Указанный недостаток обусловлен тем, что в защищенных бортовых накопителях, как правило, регистрируется только параметрическая информация, которая отвечает нормативным требованиям авиационных властей. В основном это параметры, которые характеризуют тягу силовой установки, обеспечивают безопасную эксплуатацию двигателя, информируют о работе систем силовой установки (положение рычага управлением двигателя, частоты вращения роторов, давление за компрессором, температура газов за турбиной, вибрации двигателя, давление топлива, параметры маслосистемы, запас масла и т.д.);
- низкий уровень контроля работы всего применяемого электронного и электрического двигательного оборудования, т.к. фактически контролируется работоспособность только блока мониторинга двигателя, который передает полетную информацию в комбинированный блок сбора полетных данных.
Известна беспроводная система контроля авиационного двигателя (Wireless Engine Monitoring System, WEMS) с мультиплексной линией самолетной связи для пересылки сообщений и бортовой обработки данных двигателя по изобретению US №9026273 [МПК G05B 23/02, G05D 1/00, публ. 05.03.2015]. Данная система содержит размещенные на двигателе датчики параметров газотурбинного двигателя, имеющие встроенные портативные радиопередатчики и выходные сигналы которых передаются в электронный регулятор двигателя по соответствующему радиоканалу беспроводной связи, электронный регулятор двигателя из состава цифровой системы управления с полной ответственностью типа FADEC (Full Authority Digital Engine Control) или типа ECU (Engine Control Unit); а также модуль WEMS, который содержит конформную антенну и соединен с электронным регулятором двигателя по ARINC -429. Кроме того, модуль WEMS обеспечивает взаимодействие с самолетным оборудованием по беспроводной связи на прием и передачу кодовой информации, что позволяет загружать файлы с полными полетными данными двигателя для наземной обработки после завершения полета и принимать в полете на борт управляющие воздействия в модуль WEMS, например, для увеличения частоты опроса датчиков вибраций в электронном регуляторе двигателя или подрегулировки тяги двигателя.
Для беспроводной связи «воздух-земля» используются спутниковые, сотовые, Интернет- и PSTN-системы связи, при этом скорость передачи данных составляет 10 кбит/с, а стандартная частота выдачи полетной информации ~1 Гц. Электропитание модуля WEMS осуществляется от электронного регулятора двигателя.
Основными недостатками данной системы является:
- имеется риск сбоев в работе радиоэлектронных датчиков параметров двигателя из-за возможного негативного влияния электромагнитных помех от мощного самолетного радиотехнического оборудования или двигательного сильноточного оборудования. Например, от воздействия электрических генераторов мощностью до 600 кВт и более, размещенных на коробке приводов двигателя, и используемых в бортовой системе энергоснабжения тяжелых летательных аппаратов. Выходной радиосигнал датчиков параметров двигателя может оказаться полностью заблокирован (заглушен) при штатном или случайном воздействии электромагнитных волн средств радиоэлектронной борьбы. Подобные сбои в работе могут привести к различным ложным срабатываниям электронного регулятора, вплоть до несанкционированного изменения режима работы двигателя, например, при формировании ложного значения частоты вращения ротора высокого давления двигателя;
- низкая стандартная частота опроса параметров и недостаточна высокая скорость передачи данных из модуля WEMS. Для сравнения, частота опроса входных параметров в электронном (цифровом) регуляторе двигателя РЭД-90 (аналог электронного регулятора из состава FADEC) серийно эксплуатируемого российского авиационного газотурбинного двигателя ПС-90А составляет 50 Гц, а скорость передачи данных - 100 кбит/с [«Авиационный двигатель ПС-90А». Иноземцев А.А., Коняев Е.А., и др. М., издательство «Либра - К», 2007 г., стр. 236-247];
- организация электропитания модуля WEMS от электронного регулятора двигателя может привести к неисправности электронного регулятора в случае короткого замыкания в цепях питания модуля WEMS или двигательной электропроводке. Выход из строя электронного регулятора в цифровой системе с полной ответственностью FADEC может привести к необходимости выключения двигателя в полете.
Вышеуказанным аналогам RU №2530701, US №9026273, как и другим сходным бортовым системам контроля RU №2286538 [МПК 9/00, опубл. 27.10.2006], RU №2194307 [МПК G07C 5/08, опубл. 10.12.2002], RU №2531573 [МПК G06F 17/40, опубл. 20.10.2014], ЕР №1592204 [МПК: G06Q 10/00, G06Q 50/00, опубл. 02.11.2005] характерен следующий принципиальный недостаток - низкий уровень контроля работы остального электронного и электрического двигательного оборудования. В частности, источником параметрической информации о работе двигателя в вышеуказанных патентах являются только электронный регулятор двигателя и/или блок мониторинга параметров двигателя. При этом неконтролируемыми в полете остаются следующие двигательные агрегаты - агрегат зажигания камеры сгорания двигателя, электроагрегаты запуска двигателя, блок управления реверсивным устройством. Специалистам в области авиационного двигателестроения хорошо известно, например, что для обеспечения надежного розжига камеры сгорания газотурбинного двигателя, как правило, применяют агрегат зажигания в двухканальном исполнении, к которому подключаются две свечи зажигания, по одной свече на каждый канал. В случае, если произойдет отказ одного канала агрегата зажигания двигателя, то это может оказаться не выявленным своевременно, т.к. при ближайшем запуске двигателя в промежуточном аэропорту произойдет успешный розжиг камеры сгорания двигателя от второй работоспособной свечи и внешних проявлений неисправности агрегата зажигания двигателя наблюдаться не будет. При последующем отказе другого канала агрегата зажигания розжига камеры сгорания не произойдет, неизбежно возникнет незапуск двигателя и задержка вылета. Но более критические последствия могут произойти в полете, в случае необходимости осуществления запуска двигателя в воздухе. Таким образом, постоянный («online») контроль агрегата зажигания двигателя актуален с точки зрения обеспечения надежности работы двигателя и безопасности полетов. Недопустимые ситуации могут также произойти при отсутствии постоянного контроля работоспособности электромеханизмов заслонок воздушного стартера, обеспечивающих раскрутку ротора двигателя при запуске, другого двигательного электрического оборудования (электронасосов масляной системы, электрических приводов автономных устройств перекладки реверса и т.д.). Актуальность увеличения полноты и глубины контроля электрооборудования двигателя становится еще более значимой, в связи с общемировой тенденцией создания более электрического самолета или полностью электрического самолета, где предусматривается частичная или полная замена гидро и пневмосистем на электрические системы.
Наиболее близким к предлагаемому техническому решению является автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя RU №2664901 [МПК: G01M 15/14, F02C 9/28, опубл. 23.08.2018], принятое за прототип, содержащее блок регистрации параметров двигателя, размещенный на корпусе авиационного газотурбинного двигателе и соединенный с помощью линий связи с электронными и электрическими устройствами, обеспечивающими работу авиационного газотурбинного двигателя; блок регистрации параметров соединен с наземным пультом контроля двигателя по электрическим линиям связи и/или по беспроводной связи, с электронно-вычислительной машиной лаборатории наземного контроля авиационного газотурбинного двигателя по беспроводной связи, блок регистрации параметров двигателя соединен по беспроводной связи с удаленным сервером, который обеспечивает передачу полетной информации разработчику, серийному изготовителю и эксплуатанту авиационного двигателя.
Из описания прототипа следует, что частота регистрации входной информации в блоке регистрации параметров двигателя составляет не менее 50 Гц, а выходной сигнал блока регистрации параметров двигателя представляет собой последовательный, биполярный код согласно ARINC-429 со скоростью передачи 100 кбит/с.
Электронное и электрическое двигательное оборудование, которое является объектом контроля, включает в себя следующий перечень агрегатов: электронный регулятор двигателя, блок мониторинга параметров двигателя; блок управления реверсивным устройством двигателя, блок питания и коммутации сильноточных элементов, агрегат зажигания камеры сгорания двигателя, электромеханизм системы запуска двигателя. При этом работоспособность блока регистрации параметров двигателя при стандартизованных перерывах в электропитании обеспечивается его внутренней платой электрического питания с модулем конденсаторов.
По результатам экспериментальных проверок и аналитически выявлены следующие недостатки устройства, выбранного за прототип:
- неработоспособность блока регистрации параметров двигателя при длительности перерыва в бортовом электропитании, превышающей квалификационные требования стандарта KT-160G «Условия эксплуатации и окружающей среды для бортового авиационного оборудования» (гармонизированы с международными требованиями DO-160). Указанный недостаток обусловлен тем, что электропитание блока регистрации осуществлялось по одной линии от блока питания и коммутации, соединенной с бортовой сетью +28 В. Для обеспечения надежной записи параметров в блок регистрации необходимо обеспечение дополнительного электропитания блока для парирования отказа бортового питания или обрыва проводов бортового питания +28 В;
- отсутствует контроль электронного блока защиты двигателя, представляющим собой резервный электронный ограничитель параметров двигателя в случае отказа электронного регулятора двигателя. Необходимость резервной защиты двигателя в составе двигательного оборудования определена требованиями международных авиационных властей.
Кроме того, выявлена необходимость определения частоты вращения ротора высокого давления двигателя в случае отказа всех его штатных датчиков частоты вращения ротора высокого давления на основе использования электрического сигнала с выхода электрического генератора двигателя, предназначенного для электропитания электронной системы автоматического управления двигателя и механически соединенным с ротором двигателя.
Кроме того, выявлена необходимость измерения линейных ускорений центра масс двигателя по осям X, Y, Z, т.к. определение возникших динамических перегрузок двигателя не всегда осуществляется точно на основе данных о линейных перегрузках самолета по осям X, Y, Z (из-за существенной удаленности центров масс двигателя и самолета).
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, и невозможно обеспечить при использовании прототипа, является недостаточная надежность работы, низкая эффективность и недостаточная автономность контроля авиационного газотурбинного двигателя, и недостаточный уровень контролепригодности электрического и электронного оборудования.
Технической задачей предлагаемого изобретения является повышение надежности работы автономного интегрированного устройства сбора, регистрации и контроля параметров двигателя при не стандартизованных перерывах бортового электропитания или полных отказах бортового электропитания блока, а также расширение функциональных возможностей по контролю двигательного электронного и электрического оборудования, двигателя в целом за счет введения электрического генератора для резервного электропитания блока регистрации параметров двигателя; введения контроля работоспособности электрического генератора и электронного блока защиты двигателя; повышение надежности измерения параметра частоты вращения ротора высокого давления двигателя, измерение линейных ускорений центра масс двигателя по осям X, Y, Z.
Техническая задача решается за счет того, что в автономном интегрированном устройстве сбора, регистрации и контроля параметров авиационного газотурбинного двигателя, содержащем блок регистрации параметров авиационного газотурбинного двигателя, размещенный на корпусе авиационного газотурбинного двигателя и соединенный с помощью линий связи с электронными и электрическими устройствами, обеспечивающими работу авиационного газотурбинного двигателя; блок регистрации параметров двигателя соединен с наземным пультом контроля двигателя по линиям связи и/или по беспроводной связи, с персональной электронно-вычислительной машиной лаборатории наземного контроля авиационного газотурбинного двигателя по беспроводной связи, блок регистрации параметров двигателя соединен по беспроводной связи с удаленным сервером, который обеспечивает передачу полетной информации разработчику, серийному изготовителю и эксплуатанту авиационного двигателя, согласно изобретению, дополнительно содержит электрический генератор двигателя, механически соединенный с ротором высокого давления авиационного газотурбинного двигателя, при этом в блоке питания и коммутации объединено электропитание от бортовой сети и выходное напряжение электрического генератора, а дополнительный выход блока питания и коммутации соединен с блоком регистрации параметров двигателя, также в состав автономного интегрированного устройства введен электронный блок защиты двигателя, выход которого соединен со вторым дополнительным входом блока регистрации параметров двигателя, также в состав блока регистрации параметров двигателя введен модуль измерения линейных ускорений центра масс двигателя по осям X, Y, Z.
Кроме того, согласно изобретению, в блоке питания и коммутации объединено электропитание от бортовой сети +28 В и выходное напряжение электрического генератора.
Кроме того, согласно изобретению, электрический генератор двигателя представляет собой магнитоэлектрический генератор переменного трехфазного тока переменной частоты.
Кроме того, согласно изобретению, электрический генератор двигателя содержит два канала генерирования электроэнергии.
Кроме того, согласно изобретению, в блоке питания и коммутации на основе выходного напряжения электрического генератора формируется частотный сигнал, функционально связанный с частотой вращения ротора высокого давления двигателя, причем измерение частоты вращения ротора высокого давления двигателя осуществляется в блоке регистрации параметров двигателя.
Кроме того, согласно изобретению, выходной сигнал электронного блока защиты двигателя представляет собой последовательный, биполярный код согласно ARINC-429 со скоростью передачи 100 кбит/с, а частота опроса выходного сигнала электронного блока защиты двигателя составляет не менее 50 Гц.
Кроме того, согласно изобретению, полетная информация регистрируется в режиме кольцевой записи.
Кроме того, согласно изобретению, полетная информация регистрируется в течение не менее 150 часов полета.
Кроме того, согласно изобретению, передача параметров на пульт контроля двигателя и/или персональную электронно-вычислительную машину (ПЭВМ) лаборатории наземного контроля, удаленный сервер осуществляется через беспроводную связь.
Кроме того, согласно изобретению, передача параметров на пульт контроля двигателя и/или ПЭВМ лаборатории наземного контроля осуществляется через беспроводную связь типа Wi-fi сеть.
Кроме того, согласно изобретению, в качестве удаленного сервера используют сервер, работающий по протоколу передачи файлов типа File Transfer Protocol.
Кроме того, согласно изобретению, передача параметров на удаленный сервер осуществляется через беспроводную связь в виде сотовой телефонной связи.
Кроме того, согласно изобретению, для передачи информации через телефонные сотовые сети используют канал связи типа GSM / GPRS / EDGE.
В предлагаемом изобретении, в отличие от прототипа, в состав автономного интегрированного устройства дополнительно введены электрический генератор, электронный блок защиты двигателя, а в блок регистрации параметров двигателя дополнительно введен модуль измерения линейных ускорений центра масс двигателя по осям X, Y, Z, что обеспечивает расширение функциональных возможностей по контролю двигательного электронного и электрического оборудования и обеспечивает более полную автономность контроля двигателя, снижает время поиска неисправностей, повышает достоверность данных по динамическим перегрузкам двигателя, что повышает в конечном итоге уровень контролепригодности и сокращает эксплуатационные расходы по двигателю при техническому обслуживанию.
Кроме того, достоверная оценка перегрузок двигателя позволяет более точно определить силовые нагрузки на места крепления двигателя к самолету.
В предлагаемом изобретении, в отличии от прототипа, в блоке питания и коммутации объединено электропитание от бортовой сети и выходное напряжение электрического генератора, что обеспечивает надежное электропитание блока регистрации параметров двигателя и бесперебойную запись параметров двигателя при отказах бортового электропитания и работе двигателя.
В предлагаемом изобретении, в отличии от прототипа, осуществляется измерение частоты вращения ротора высокого давления двигателя по частотному сигналу, формируемом блоком питания и коммутации по сигналу от электрического генератора, что обеспечивает высокую надежность измерения параметра частоты вращения ротора высокого давления, даже при отказах всех штатных датчиков измерения частоты вращения.
На фиг. 1 представлена блок-схема автономного интегрированного устройства сбора, регистрации и контроля параметров авиационного газотурбинного двигателя.
Блок 1 - блок мониторинга параметров двигателя. Предназначен для объективного контроля двигателя и его систем, диагностики и прогнозирования технического состояния двигателя. Представляет собой специализированный многопроцессорный вычислитель (в виде моноблока прямоугольного сечения), работающий в реальном масштабе времени и оснащенный устройствами сопряжения с датчиками и сигнализаторами двигателя; с электронным регулятором 2 двигателя; с блоком 9 регистрации параметров двигателя; самолетными системами регистрации, индикации и технического обслуживания.
В блоке мониторинга 1 параметров двигателя осуществляется прием и обработка принятой информации по заданным алгоритмам с выдачей результатов обработки и текущих значений параметров, сигналов в бортовые системы самолета регистрации и индикации, а также в блоки 2, 9 в виде последовательных, биполярных кодов согласно ARINC-429.
Прием параметров двигателя в блоке мониторинга осуществляется с помощью соответствующих датчиков (термопар, терморезисторов, синус-косинусных трансформаторов, датчиков магнитоэлектрического типа, датчиков вибраций и т.д.) и сигнализаторов 13.
Согласно изобретения выход блока 1 соединен с первым входом (1вх) блока 9.
Блок 2 - электронный (цифровой) регулятор двигателя из состава системы автоматического управления и контроля двигателя. Предназначен для формирования управляющих воздействий на исполнительные механизмы системы автоматического управления и агрегатов двигателя на всех режимах работы двигателя в соответствии с заданными законами и программами регулирования. Представляет собой специализированный многопроцессорный электронный вычислительный комплекс, работающий в реальном масштабе времени, оснащенный устройствами сопряжения с датчиками и сигнализаторами 14, с электронными и электрическими устройствами двигателя (в составе блока 2 без позиции на фиг. 1), с бортовыми системами самолета, например, с многоканальной системой регистрации параметров, с системой управления самолетным оборудованием, с комплексной системой управления и др.
Конструктивно блок 2 выполнен в виде моноблока прямоугольного сечения и размещается на корпусе двигателя. Блок 2 взаимодействует с отдельным комплектом датчиков и сигнализаторов 14, принцип действия которых аналогичен датчикам и сигнализаторам 13 блока 1. К основным измеряемым параметрам блока 2 следует отнести: положение рычага управления двигателем, температура и давление воздуха на входе в двигатель, частота вращения роторов, давление воздуха за компрессором высокого давления, температура газов за турбиной, положение дозирующей иглы, положение штоков гидроцилиндров управления механизацией, температура масла на входе в двигатель, положение замка и створок реверса и т.д.
Блок 2 обеспечивает прием входной информации и передачу выходной информации в виде последовательного, биполярного кода согласно ARINC-429.
Согласно изобретения выход блока 2 соединен со вторым входом (2вх) блока 9.
Блок 3 - блок управления реверсивным устройством двигателя. Блок 3 предназначен для исполнения управляющих команд, сформированных в блоке 2, на перекладку реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга» двигателя и обратно. Блок 3 представляет собой набор электронных компонентов, помещенных в отдельный герметичный корпус в виде моноблока прямоугольного сечения, который размещен на корпусе двигателя.
Согласно изобретения выход блока 3 соединен с третьим входом (3вх) блока 9.
Блок 4 - электрический генератор, предназначен для выработки электрической энергии в блок 5. Электрический генератор размещается на коробке приводных агрегатов двигателя и, таким образом, механически связан с ротором высокого давления двигателя. Для повышения надежности электрический генератор содержит два канала генерирования (канал 1, канал 2). Оба канала генерирования блока 4 соединены с блоком 5.
Блок 5 - блок питания и коммутации сильноточных цепей. Представляет собой выпрямительно-преобразовательное устройство, которое предназначено для электропитания блоков 2 и 9 напряжением постоянного тока +28 В, коммутации электрических цепей устройств двигателя по управляющим командам из блока 2. Входными напряжениями в блок 5 является напряжение бортовой сети +28 В и выходное напряжение от двух каналов генерирования блока 4, поэтому в блоке 5 осуществлено объединение вышеуказанных напряжений, что обеспечивает развязку цепей питания (не показана) и формирование на выходе блока 5 надежного электропитания блоков 2,9, в т.ч. при полных отказах бортовой электросети. Схема развязки цепей питания может быть любой известной, например, с помощью диодов. Электропитание из блока 5 поступает на четвертый вход (4вх) блока 9.
В блоке питания и коммутации на основе выходного напряжения электрического генератора формируется частотный сигнал, функционально связанный с частотой вращения ротора высокого давления двигателя, причем измерение частоты вращения ротора высокого давления двигателя осуществляется в блоке регистрации параметров двигателя.
Также в связи с вводом блока 4 в состав автономного интегрированного устройства в блоке 5 при работе двигателя, согласно изобретения, обеспечивается формирование и выдача частотных сигналов, пропорциональных частоте вращения ротора высокого давления двигателя, выделенных из напряжения от первого и второго каналов генератора. Выходной частотный сигнал с выхода блока 5 поступает на пятый вход (5вх) блока 9.
Блок 6 - агрегат зажигания камеры сгорания двигателя. Предназначен для преобразования напряжения питания в напряжение, необходимое для функционирования двух свечей зажигания (бесперебойного искрообразования). Агрегат зажигания камеры сгорания двигателя совместно с двумя свечами используется для непосредственного воспламенения топливовоздушной смеси в камере сгорания авиационного газотурбинного двигателя или в пусковых воспламенителях ГТД. Управление блоком 6 осуществляется блоком 2 через блок 5. Конструктивно блок 6 выполнен в виде моноблока прямоугольного сечения.
Согласно изобретения выход блока 6 соединен через электрическую цепь постоянного тока с шестым входом (6вх) блока 9.
Блок 7 - электромеханизм с электродвигателем, установленный на заслонке воздушного стартера для запуска двигателя. Выход блока 7 соединен с седьмым входом (7вх) блока 9.
Блок 8 - электронный блок защиты двигателя, выход которого соединен со вторым дополнительным входом блока регистрации параметров двигателя. Предназначен для защиты двигателя от раскрутки ротора вентилятора или раскрутки ротора компрессора высокого давления. Блок 8 представляет собой специализированный электронный вычислительный комплекс, работающий в реальном масштабе времени, оснащенный устройствами сопряжения с датчиками частоты вращения, электромагнитным клапаном останова двигателя (не показаны на рис. 1), а также осуществляющий с блоком 9 информационный обмен по ARINC-429. Скорость передачи информации 100 кбит/с. Блок 8 конструктивно выполнен в виде моноблока прямоугольного сечения и устанавливается в корпусе воздухозаборника двигателя.
Блок 9 - блок регистрации параметров двигателя. Блок 9 устанавливается на корпусе газотурбинного двигателя (на фиг. 1 не показан). Предназначен для регистрации информации от блоков 1, 2, 3, 4, 5, 6, 7 и 8, обеспечивающих работу газотурбинного двигателя и его электрического, электронного оборудования. В блоке 9 также регистрируется кодовая информации о параметрах полета самолета и других сопутствующих параметров самолетных систем, необходимых для анализа работы двигателя.
Согласно заявляемого изобретения в состав блока 9 дополнительно введен модуль измерения линейных ускорений центра масс двигателя по осям X, Y, Z. Данный модуль представляет собой трехосевой блок датчиков линейного ускорения, выходные сигналы которых обрабатываются в вычислителе, а затем, наряду с остальными регистрируемыми сигналами поступают в энергонезависимый накопитель полетной информации (память). Поскольку модуль измерения линейных ускорений входит в состав блока 9, размещенного на двигателе, то и определение возникших динамических перегрузок двигателя по осям X, Y, Z осуществляется более точно, чем на основе данных о линейных перегрузках самолета из-за существенной удаленности центров масс двигателя и самолета. Блок датчиков линейного ускорения по осям X, Y, Z может быть любой известной конструкцией. Кроме того, достоверная оценка перегрузок двигателя позволяет более точно определить силовые нагрузки на места крепления двигателя к самолету.
Регистрация в блоке 9 выполняется с частотой, необходимой для анализа быстротекущих процессов и в полном объеме. Конструктивно блок 9 выполнен в виде моноблока прямоугольного сечения.
В блоке 9 в процессе приема информации одновременно с регистрацией параметров двигателя осуществляется вычисление диагностических параметров, характеризующих работу двигателя и системы автоуправления, наработок двигателя, наработка элементов системы автоуправления, которые также фиксируются (регистрируются). Примером диагностических параметров могут быть сигналы типа «Механизация компрессора неисправна», «Высокая температура», работа двигателя на режиме ограничения, слова отказов и т.д.
Выходной сигнал блока 9 представляет собой последовательный, биполярный код, согласно ARINC-429, который поступает по беспроводному каналу связи:
- в блок 10 - ПЭВМ лаборатории наземного контроля. Согласно изобретения в качестве беспроводного канала локальной связи блока 9 с блоком 10 применяется Wi-fi сеть;
- в блок 11 - наземный пульт контроля двигателя. Согласно изобретения в качестве беспроводного канала локальной связи блока 9 с блоком 10 применяется Wi-fi сеть. Дополнительно передача информации из блока 9 в блок 10 может осуществляться по проводному каналу связи Ethernet;
- в удаленный сервер 12 для передачи информации через телефонные сотовые сети по каналу связи типа GSM / GPRS / EDGE на предприятия разработчика, изготовителя и эксплуатанта авиационного газотурбинного двигателя по прилету самолета и/или в полете.
Блок 9 также обеспечивает автоматическое формирование и передачу протоколов экспресс-обработки зарегистрированной информации по беспроводным каналам связи с заключением о исправности или неисправности двигателя. Протокол экспресс-обработки представляет собой хронометраж зарегистрированных параметров и событий, включая слова отказов.
Для реализации вышеуказанных функций блок 9 содержит вычислитель, устройство ввода-вывода полетной информации (без позиции на фиг.v1), в том числе модуль беспроводной связи, энергонезависимый накопитель полетной информации, модуль измерения линейных ускорений центра масс двигателя по осям X, Y, Z, плату электрического питания, таймер (в составе блока 9 без позиции на фиг. 1).
Наличие энергонезависимого накопителя полетной информации обеспечивает сохранение зарегистрированной полетной информации при сбоях или отсутствии электрического питания блока 9. Полетная информация регистрируется в течении не менее 150 часов полета в режиме кольцевой записи. Плата электрического питания с модулем конденсаторов обеспечивает работоспособность блока 9 при стандартизованных перерывах в электропитании и отсутствии выходного напряжения с блока 4 (например, на остановленном двигателе или при отказе обоих каналов электрического генератора).
Блок 10 - персональная электронно-вычислительная машина (ПЭВМ) лаборатории наземного контроля аэропорта или авиационно-технической базы, где осуществляется автоматизированной послеполетный контроль параметров двигателя.
Блок 11 - наземный пульт контроля двигателя, может быть исполнен переносным, например, в варианте персонального компьютера типа «Notebook» или планшетного компьютера. Предназначен для визуальной индикации оператору параметров двигателя и его систем.
Предлагаемое устройство регистрации параметров авиационного газотурбинного двигателя работает следующим образом.
В процессе работы авиационного газотурбинного двигателя на стационарных и динамических режимах в реальном масштабе времени, непрерывно из блоков 1, 2, 3, 4, 5, 6, 7, 8 осуществляется выдача информационных и электрических сигналов, которые поступают на вход блока 9 регистрации параметров двигателя. Таким образом, в блоке 9, в его встроенном накопителе регистрируется полная информация о работе двигателя и его систем, необходимая для эффективного технического обслуживания двигателя, оперативного выяснения причин возможных дефектов и исследования нештатных ситуаций.
В случае отказа бортовой сети питания +28 В блок 9 сохранит свою работоспособность, так как электропитание блока 9 будет надежно обеспечено от электрического генератора (блока 4), имеющего два независимых канала генерирования. Реализация блока 4 в виде магнитоэлектрического генератора обеспечивает надежное измерение частоты вращения ротора высокого давления двигателя в блоке 9, что необходимо при отказах штатных датчиков частоты вращения ротора высокого давления двигателя из состава комплекта 13 и 14.
Размещение модуля измерения линейных ускорений центра масс двигателя в блоке 9 позволяет точно определить возникающие линейные перегрузки двигателя и его элементов на всех этапах полета, например, в подшипниках двигателя в случае жесткой посадки самолета на одно крыло и необходимости аналитической оценки данного события на предмет возможности дальнейшей эксплуатации подшипников.
По окончании полета и выключении двигателя информация из блока 9 передается по беспроводной локальной связи типа Wi-fi или электрическим линям связи на пульт контроля двигателя или ПЭВМ эксплуатирующей организации после их подключения.
Передача параметров на пульт контроля двигателя и/или ПЭВМ лаборатории наземного контроля, удаленным сервером осуществляется через беспроводную связь. Передача параметров на пульт контроля двигателя и/или ПЭВМ лаборатории наземного контроля осуществляется через беспроводную связь типа Wi-fi сеть. В качестве удаленного сервера используют сервер, работающий по протоколу передачи файлов типа File Transfer Protocol. Передачу параметров на удаленный сервер осуществляют через беспроводную связь в виде сотовой телефонной связи.
Кроме того, блок 9 обеспечивает автоматическую передачу протоколов экспресс-обработки с заключением о исправности или неисправности двигателя в пульт контроля двигателя или ПЭВМ эксплуатирующей организации.
Выходной сигнал блока 9 также поступает по беспроводному каналу связи (радиосвязи) в удаленный сервер 12 для передачи информации через телефонные сотовые сети по каналу связи типа GSM / GPRS / EDGE на предприятия разработчика, изготовителя и эксплуатанта авиационного газотурбинного двигателя по прилету самолета и/или в полете. На самом деле специалистам в области радиосвязи и телекоммуникаций ясно, что технологии беспроводной и проводной связи могут быть самыми разнообразными, включая высокоскоростной спутниковый интернет и/или технологии 5G.
Необходимо также подчеркнуть, что регистрация в блоке 9 кодовой информации о параметрах полета самолета, координатах и эволюциях его движения, других сопутствующих параметров самолетных систем, в наибольшей степени повышает качество анализа работы авиационного ГТД и его элементов. Кроме того, регистрация координат самолета в блоке 9 может облегчить поиск самого самолета, даже в случае намеренного отключения бортовых систем, передающих информацию о параметрах полета.
Размещение блока регистрации параметров двигателя непосредственно на корпусе двигателя (на фиг. 1 не показан) обеспечивает заявляемой системе свойство автономности по контролю двигательных параметров, т.е. ее функциональную работоспособность независимо от состояния бортового оборудования, в том числе технического обслуживания, наличия наземных средств обработки.
Интегрированность устройства обеспечивается тем, что блок регистрации параметров двигателя взаимодействует, т.е. обеспечивает сбор данных со всех имеющихся отдельных электронных и электрических устройств двигателя, а также прием информации из самолетных систем. В качестве электронных и электрических устройств двигателя применяются - электронный регулятор двигателя, электронный блок мониторинга параметров двигателя, блок питания и коммутации сильноточных агрегатов двигателя, блок управления реверсивным устройством, агрегат зажигания камеры сгорания двигателя, электрический генератор, электромеханизмы запуска, электронный блок защиты двигателя. Но специалистам в области двигателестроения ясно, что в каждом конкретном случае контролю могут подвергаться другие электроагрегаты и блоки двигателя, в любых необходимых сочетаниях.
Устройство заявляемой конструкции успешно прошло апробацию и обеспечило проведение различных типов стендовых и летных испытаний авиационных двигателей типа ПС-90А разработки АО «ОДК-Авиадвигатель и ПД-14 (головной разработчик АО «ОДК-Авиадвигатель»), предназначенных для ближне-, среднемагистральных и дальнемагистральных самолетов четвертого и пятого поколения. Была подтверждена эффективность и полезность автономной системы регистрации, работоспособность блока регистрации параметров двигателя, в т.ч. при имитациях отказа бортовой сети и электропитании от электрического генератора. В качестве электрического генератора успешно применен генератор переменного трехфазного тока переменной частоты типа ГС 112-0,37-150-1000 разработки АО «Электропривод», г. Киров, РФ. Данный генератор магнитоэлектрического типа также оказался удовлетворительным для выдачи электрического сигнала с частотой, пропорциональной частоте вращения ротора высокого давления двигателя.
Автономное интегрированное устройство сбора, регистрации и контроля параметров авиационного двигателя заявляемой конструкции успешно обеспечило регистрацию более 3200 аналоговых и цифровых сигналов о работе авиационного двигателя и его систем.
Блок регистрации параметров двигателя конструктивно представляет собой моноблок в виде герметичного корпуса с типовыми электрическими соединителями и амортизаторами. В качестве вычислительного процессора блока регистрации параметров двигателя использовали процессор СРВ906 - компьютерный модуль FCOM на базе процессора х86 архитектуры Vortex86DX. Модуль процессора СРВ906 имеет встроенный Flash диск на базе микросхемы Flash-памяти объемом 2…4 Гбайт, на который и выполняли регистрацию полетной информации.
Объем энергонезависимого накопителя полетной информации блока регистрации параметров успешно обеспечил регистрацию данных в течение не менее 150 часов полета (кругосветный полет) в режиме кольцевой записи.
При передаче данных на предприятие разработчик двигателя в качестве удаленного сервера использовали FTP - сервер, т.е., работающий по протоколу передачи файлов типа File Transfer Protocol.
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет повысить надежность, эффективность и автономность контроля авиационного двигателя, снизить время поиска неисправностей, повысить уровень контролепригодности электрического и электронного оборудования и эффективность эксплуатации авиационного газотурбинного двигателя, сократить эксплуатационные расходы на техническое обслуживание.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя | 2017 |
|
RU2664901C1 |
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя | 2020 |
|
RU2757949C1 |
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя с высоконадежным электропитанием | 2020 |
|
RU2757744C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СБОРА, КОНТРОЛЯ, ОБРАБОТКИ И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2530701C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СБОРА, КОНТРОЛЯ, ОБРАБОТКИ И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2012 |
|
RU2528092C2 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |

Изобретение относится к области авиационной техники и предназначено для использования в бортовых системах сбора, регистрации и контроля параметров летательных аппаратов с использованием беспроводной технологии передачи полетной информации, преимущественно для контроля параметров авиационного газотурбинного двигателя (ГТД) и его электронного и электрического оборудования. Устройство содержит блок регистрации параметров ГТД, который соединен с электронными и электрическими устройствами, с наземным пультом контроля двигателя по линиям связи и/или по беспроводной связи, с ПЭВМ лаборатории наземного контроля ГТД по беспроводной связи. Блок регистрации параметров соединен по беспроводной связи с удаленным сервером, который передает полетную информацию разработчику, изготовителю и эксплуатанту авиационного ГТД. Дополнительно в устройстве содержится электрический генератор, механически соединенный с ротором высокого давления ГТД, при этом в блоке питания и коммутации объединено электропитание от бортовой сети и выходное напряжение электрического генератора, а дополнительный выход блока питания и коммутации соединен с блоком регистрации параметров. Дополнительно устройство содержит электронный блок защиты двигателя, выход которого соединен со вторым дополнительным входом блока регистрации параметров. В блок регистрации параметров введен модуль измерения линейных ускорений центра масс двигателя по осям X, Y, Z. В блоке питания и коммутации объединено электропитание от бортовой сети +28 В и выходное напряжение электрического генератора. Электрический генератор представляет собой магнитоэлектрический генератор переменного трехфазного тока переменной частоты, содержит два канала генерирования электроэнергии. В блоке питания и коммутации на основе выходного напряжения электрического генератора формируется частотный сигнал, функционально связанный с частотой вращения ротора высокого давления, которая измеряется в блоке регистрации параметров. Выходной сигнал электронного блока защиты двигателя представляет собой последовательный биполярный код согласно ARINC-429 со скоростью передачи 100 кбит/с, а частота опроса выходного сигнала электронного блока защиты двигателя составляет не менее 50 Гц. Полетная информация регистрируется в течение не менее 150 часов полета в режиме кольцевой записи. Передача параметров осуществляется через беспроводную связь типа Wi-fi сеть, через канал связи типа GSM / GPRS / EDGE. В качестве удаленного сервера используют сервер, работающий по протоколу передачи файлов типа File Transfer Protocol. Изобретение позволяет повысить надежность, эффективность и автономность контроля, снизить время поиска неисправностей, повысить уровень контролепригодности электрического и электронного оборудования и эффективность эксплуатации, сократить эксплуатационные расходы на техническое обслуживание авиационного ГТД. 12 з.п. ф-лы, 1 ил.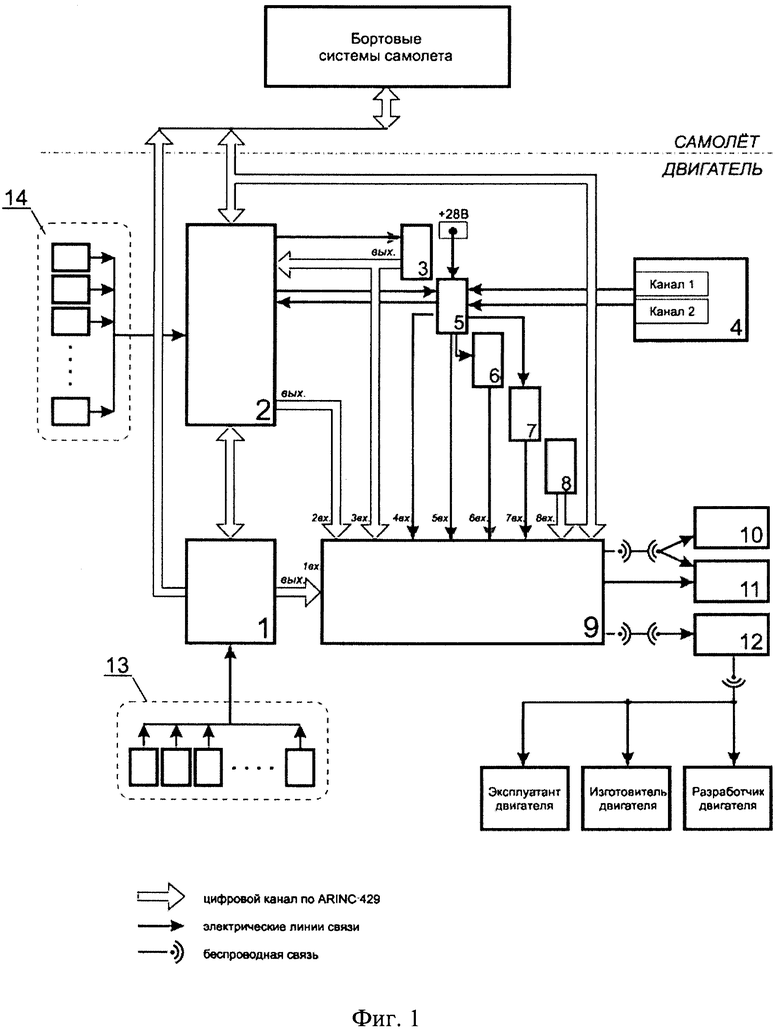
1. Автономное интегрированное устройство сбора, регистрации и контроля параметров авиационного газотурбинного двигателя, содержащее блок регистрации параметров авиационного газотурбинного двигателя, размещенный на корпусе авиационного газотурбинного двигателя и соединенный с помощью линий связи с электронными и электрическими устройствами, обеспечивающими работу авиационного газотурбинного двигателя; блок регистрации параметров двигателя соединен с наземным пультом контроля двигателя по линиям связи и/или по беспроводной связи, с персональной электронно-вычислительной машиной лаборатории наземного контроля авиационного газотурбинного двигателя по беспроводной связи, блок регистрации параметров двигателя соединен по беспроводной связи с удаленным сервером, который обеспечивает передачу полетной информации разработчику, серийному изготовителю и эксплуатанту авиационного двигателя, отличающееся тем, что дополнительно содержит электрический генератор двигателя, механически соединенный с ротором высокого давления авиационного газотурбинного двигателя, при этом в блоке питания и коммутации объединено электропитание от бортовой сети и выходное напряжение электрического генератора, а дополнительный выход блока питания и коммутации соединен с блоком регистрации параметров двигателя, также в состав автономного интегрированного устройства введен электронный блок защиты двигателя, выход которого соединен со вторым дополнительным входом блока регистрации параметров двигателя, также в состав блока регистрации параметров двигателя введен модуль измерения линейных ускорений центра масс двигателя по осям X, Y, Z.
2. Автономное интегрированное устройство по п. 1, отличающееся тем, что в блоке питания и коммутации объединено электропитание от бортовой сети +28 В и выходное напряжение электрического генератора.
3. Автономное интегрированное устройство по п. 1, отличающееся тем, что электрический генератор представляет собой магнитоэлектрический генератор переменного трехфазного тока переменной частоты.
4. Автономное интегрированное устройство по п. 3, отличающееся тем, что электрический генератор содержит два канала генерирования электроэнергии.
5. Автономное интегрированное устройство по п. 2, отличающееся тем, что в блоке питания и коммутации на основе выходного напряжения электрического генератора формируется частотный сигнал, функционально связанный с частотой вращения ротора высокого давления двигателя, причем измерение частоты вращения ротора высокого давления двигателя осуществляется в блоке регистрации параметров двигателя.
6. Автономное интегрированное устройство по п. 1, отличающееся тем, что выходной сигнал электронного блока защиты двигателя представляет собой последовательный биполярный код согласно ARINC-429 со скоростью передачи 100 кбит/с, а частота опроса выходного сигнала электронного блока защиты двигателя составляет не менее 50 Гц.
7. Автономное интегрированное устройство по п. 1, отличающееся тем, что полетная информация регистрируется в режиме кольцевой записи.
8. Автономное интегрированное устройство по п. 7, отличающееся тем, что полетная информация регистрируется в течение не менее 150 часов полета.
9. Автономное интегрированное устройство по п. 1, отличающееся тем, что передача параметров на пульт контроля двигателя и/или персональную электронно-вычислительную машину лаборатории наземного контроля, удаленный сервер осуществляется через беспроводную связь.
10. Автономное интегрированное устройство по п. 9, отличающееся тем, что передача параметров на пульт контроля двигателя и/или персональную электронно-вычислительную машину лаборатории наземного контроля осуществляется через беспроводную связь типа Wi-fi сеть.
11. Автономное интегрированное устройство по п. 9, отличающееся тем, что в качестве удаленного сервера используют сервер, работающий по протоколу передачи файлов типа File Transfer Protocol.
12. Автономное интегрированное устройство по п. 9, отличающееся тем, что передачу параметров на удаленный сервер осуществляют через беспроводную связь в виде сотовой телефонной связи.
13. Автономное интегрированное устройство по п. 12, отличающееся тем, что для передачи информации через телефонные сотовые сети используют канал связи типа GSM/GPRS/EDGE.
| Автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя | 2017 |
|
RU2664901C1 |
| БОРТОВАЯ СИСТЕМА КОНТРОЛЯ АВИАДВИГАТЕЛЯ С ОГРАНИЧЕНИЕМ ТЕМПЕРАТУРЫ, ТОПЛИВНЫХ ПАРАМЕТРОВ И ДАВЛЕНИЯ | 2003 |
|
RU2250382C2 |
| US 20140114549 A1, 24.04.2014 | |||
| СПОСОБ КОНТРОЛЯ РАСХОДА МАСЛА АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2386835C1 |

