Изобретение относится к области управления газотурбинным двигателем, в частности к электромеханическим системам управления реверсивным устройством газотурбинного двигателя (ГТД) с применением электронной цифровой системы автоматического управления двигателя типа FADEC (full authority digital engine control).
В настоящее время практически на всех типах пассажирских и транспортных самолетов с ГТД применяются реверсивные устройства, изменяющие направление реактивной струи двигателя на противоположное, создавая обратную тягу, обеспечивающую торможение самолета после посадки или в случае прерванного взлета.
Известен электромеханический реверсор тяги турбореактивного двигателя с устройством постоянного контроля положения (Патент RU №2313 681, МПК F02K 1/76, публ. 27.12.2007), включающий цифровую систему управления двигателем с полной: ответственностью типа FADEC с электронным регулятором двигателя, содержащим два электронных канала управления с возможностью выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; два отдельных электронных блока управления реверсивным устройством, два электродвигателя, механически соединенных с двумя створками реверсивного устройства, выполненными с возможностью перемещения между открытым и закрытым положением, при этом каждая из указанных створок управляется отдельным электронным блоком управления, электрически соединенным с соответствующим электронным каналом электронного регулятора двигателя; указанные электронные блоки управления реверсивным устройством соединены друг с другом для обмена данными.
К основным недостаткам данного аналога относятся:
- усложнение конструкции двигателя из-за увеличения количества применяемых электронных блоков управления на двигателе, увеличения количества электрических линий связи, обеспечивающих взаимодействие электронных блоков управления между собой, а также из-за применения механической синхронизирующей связи между створками. Следствием сложности конструкции является понижение надежности работы и увеличение стоимости системы;
- увеличение массы двигателя из-за необходимости применения отдельного блока управления на каждую створку реверсивного устройства, а также из-за увеличения количества электрических линий связи.
Известна система управления летательного аппарата (Патент RU №2 556 474, МПК F02K 1/76, публ. 10.07.2015), в которой вышеуказанные недостатки устранены. Согласно описанию данного аналога, система управления содержит автономный электронный регулятор двигателя из состава цифровой системы управления типа FADEC с возможностью прямого управления и контроля подвижными элементами реверсивного устройства, электромеханическими манипулирующими органами и их датчиками положения, электрическими фиксаторами реверсивного устройства; блок электропитания мотогондолы, который размещен отдельно от электронного регулятора двигателя.
Основными недостатками данного аналога являются ухудшение электромагнитной обстановки в электронном регуляторе двигателя, т.к. силовое электропитание электромеханических манипулирующих органов проходит через электронный регулятор двигателя. Кроме того, наличие высоковольтного электропитания из бортовой электрической сети может оказать опасное воздействие на наземный обслуживающий персонал во время технического обслуживания системы управления реверсивного устройства или системы управления типа FADEC. Также раскрытая в данном аналоге система управления не рассматривает использование нескольких каналов электронного регулятора двигателя, вместо этого показывает систему, соединенную с одним каналом системы управления типа FADEC. Отказ единственного канала электронного регулятора двигателя неизбежно ведет к невключению реверсивного устройства.
Известна архитектура системы для электромеханических систем управления реверсором тяги (Патент US №6655125, МПК F02K 1/76, публ. 02.12.2003), в которой вышеуказанный недостаток, связанный с ухудшением электромагнитной обстановки, устранен. Согласно описанию данного аналога, электромеханическая система содержит электронный регулятор двигателя из состава системы управления типа FADEC, который имеет два канала управления; электронный блок управления, имеющий по меньшей мере два канала управления, множество электромеханических исполнительных механизмов, множество первичных и альтернативных механизмов блокировки, множество датчиков положения. Электропитание электронного блока осуществляется от каждого канала электронного регулятора двигателя, при этом электропитание 115В переменного тока силовой нагрузки поступает в первый канал электронного блока, а сама силовая нагрузка также подключена к первому каналу электронного блока управления.
Основным недостатком данного аналога является то, что электропитание электронного блока управления обеспечивается от электронного регулятора, а не от бортовой электросети. Это приводит к повышенному энергопотреблению цифровой системы управления, понижению надежности работы электронного регулятора двигателя и даже к его возможной неисправности в случае короткого замыкания в линиях связи электропитания электронного блока управления; а также к дополнительному тепловому нагреву работающего канала электронного регулятора двигателя, что, как правило, оказывает негативное влияние на работоспособность электронного оборудования. Кроме того, в описании аналога отсутствует информация о том, как обеспечивается электропитание силовой нагрузки и, следовательно, работоспособность системы в случае отказа первого канала электронного блока.
Известна полезная модель на высоконадежный отказобезопасный привод реверсивного устройства (Патент RU №175 530, МПК: F02K 1/76, B64D 29/00, B64D 31/00, публ. 07.12.2017), включающий, как минимум, один блок управления, как минимум два электромеханических исполнительных устройства - электромеханизма, каждый из которых представляет собой привод (актуатор) линейного перемещения, при этом в конструкции электромеханизма использованы электродвигатель, два датчика положения, электромагнитная тормозная муфта.
Основными недостатками данного аналога являются:
- отсутствие применения датчиков и/или сигнализаторов для контроля за работой основного электромеханического замка, предназначенного для удержания подвижной части реверсивного устройства в закрытом положении, что снижает эффективность и отказоустойчивость работы привода;
- ограниченность данных о взаимодействии с электронной цифровой системой управления двигателя и рычагом управления двигателем, что затрудняет возможность оценку надежности и отказобезопасности электропривода при отказах электронного регулятора двигателя и органов управления;
- не пояснено, за счет чего обеспечивается работоспособность электропривода при отказе электромеханизма.
Известна электрическая система привода реверсора тяги газотурбинного двигателя (Патент RU №2 697 078, публ. 12.08.2019), содержащая подвижную и неподвижную части реверсора тяги (реверсивного устройства), минимум один электронный блок управления и не менее двух электромеханических приводных устройств, которые синхронизированы электронной системой, источник питания, причем обеспечивается равномерное распределение нагрузки между электромеханическими приводными устройствами. Из описания патента следует, что применительно к системе реверсивного устройства решетчатого типа, включающей три идентичных комплекта электромеханических приводных устройств, в случае отказа одного из них блок управления повышает и равномерно распределяет мощность на оставшиеся два агрегата электромеханических приводных устройств за счет того, что электромеханические приводные устройства подключены к отдельному источнику питания. Кроме того, из описания следует, что электронный блок управления электрически подключается к электронной системе управления двигателем или самолетом.
К основным недостаткам данного аналога относится:
- не пояснено, как функционально взаимосвязано повышение и равномерное распределение мощности электромеханических приводных устройств с подключением к отдельному источнику питания;
- ограниченность данных о взаимодействии с электронной цифровой системы управления двигателя и ее структуре, неполнота сведений о взаимодействии с типовыми элементами системы в целом - замками и/или фиксаторами, датчиками положения подвижных элементов реверсивного устройства, рычагом управления двигателем (реверсивного устройства).
Наиболее близкой по технической сущности и совокупности признаков, а также функциональной структуре к заявляемому изобретению является система управления для устройства реверсирования тяги газотурбинного двигателя (Патент RU №2142569, МПК F02K 1/76, публ. 10.12.1999), которая принята за наиболее близкий аналог (прототип), содержащая электронный регулятор двигателя, электронный блок управления электромеханическими приводными органами, по меньшей мере, один блок электромеханических приводных органов для открытия или закрытия реверсивного устройства, который включает по меньшей мере электродвигатель, винтовую передачу и механизм стопорения электродвигателя; датчик положения подвижной части реверсивного устройства, электромеханический замок реверсивного устройства, датчик положения электромеханического замка реверсивного устройства, рычаг управления двигателем с выключателем для коммутации электрической цепи электромеханического замка после перевода рычага управления двигателем на площадку работы реверсивного устройства, при этом выход электронного регулятора двигателя соединен с входом электронного блока управления, первый выход электронного блока управления соединен с блоком электромеханических приводных органов, а второй выход электронного блока управления соединен с входом электронного регулятора, бортовую систему регистрации и индикации параметров полетной информации.
Из описания патента также следует, что в качестве электронной системы регулирования двигателя применяется электронная цифровая система управления типа FADEC; применяемые датчики состояния подвижных створок реверсивного устройства обеспечивают контроль открытого или закрытого положения этих створок. Предпочтительным применением системы является ее использование в составе реверсивного устройства створчатого типа (по одному блоку приводных органов на каждую из четырех створок).
Основными недостатками данного прототипа являются:
1. Повышенная сложность электромеханической системы из-за применения большого количества органов фиксации для удержания подвижных элементов электропривода и реверсивного устройства. Так, при применении трех фиксаторов на каждый из четырех используемых блоков приводных органов в предпочтительном варианте устройства реверсирования необходимо применение 12 фиксаторов. Сложность электромеханической системы обуславливается также тем, что в общей сумме предусматривается применение 24 отдельных датчиков состояния различных элементов системы (по шесть датчиков в каждом блоке). Кроме того, дополнительно предусматривается редуктор для связи электродвигателя с винтовой передачей. Следствием повышенной сложности является понижение надежности работы, увеличение массы, материалоемкости и стоимости электромеханической системы, реверсивного устройства и двигателя в целом. Также существенно повышаются эксплуатационные затраты на обслуживание двигателя и увеличиваются риски задержки вылетов самолетов из-за неизбежных повышенных трат времени и ресурсов на поиск и устранение возможных отказов многочисленных датчиков и органов фиксации электромеханической системы, выявленных, например, на предполетном контроле.
2. Низкая эффективность контроля за положением основного электромеханического замка, обеспечивающего удержание подвижной части реверсивного устройства относительно его неподвижной части.
Так, в случае отказа электронного блока управления по различным причинам, и, следовательно, невозможности использования информации из данного блока, у экипажа отсутствуют сведения о фактическом положении замка реверсивного устройства и, в таком случае, крайне сложно достоверно определить в каком именно положении находится реверсивное устройство, что в конечном итоге негативно влияет на безопасность полета.
3. Не показано, что именно является входным воздействием в электронный регулятор двигателя для формирования управляющих команд в электронный блок управления.
4. Раскрытая в данном аналоге система управления не рассматривает дублирование каналов электронного регулятора двигателя из состава системы типа FADEC и дублирование каналов электронного блока управления реверсивным устройством, а вместо этого показывает систему, соединенную только с одним каналом системы типа FADEC и одним каналом электронного блока управления устройства реверсирования. Отказ единственного канала электронного регулятора двигателя по прототипу неизбежно ведет к потере работоспособности привода и к не включению реверсивного устройства. Отказ единственного канала электронного блока управления также неизбежно ведет к не включению реверсивного устройства решетчатого типа, существенному снижению величины обратной тяги при применении реверсивного устройства створчатого типа (до 25% при применении четырехстворчатой схемы устройства реверсирования).
5. Низкое качество управления и малоэффективная электронная синхронизация подвижных элементов реверсивного устройства решетчатого типа в случае применения датчиков примыкания релейного типа (сигнализаторов) для контроля перемещений.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, й невозможно обеспечить при использовании прототипа, является недостаточная надежность и низкая отказобезопасность электромеханической системы, недостаточная безопасность полетов, низкая эффективность контроля за положением основного электромеханического замка, повышенные эксплуатационные затраты, повышенная сложность и масса электрических коммуникаций и в целом газотурбинного двигателя.
Технической задачей предлагаемого изобретения является повышение надежности и качества управления электромеханической системы управления реверсивным устройством газотурбинного двигателя, повышение безопасности полета в целом, снижение массы и общих затрат на изготовление и эксплуатацию двигателя за счет:
1. Уменьшения общего количества органов фиксации для удержания подвижных элементов электропривода и реверсивного устройства фиксаторов, а также уменьшения общего количества датчиков положения.
Применительно к реверсивному устройству решетчатого типа количество фиксаторов уменьшается с 12 до 4 (одного электромеханического замка и трех электромагнитных тормозных муфт).
Уменьшение количества органов фиксации и датчиков положения дополнительно уменьшает массу электрических коммуникаций и в целом двигателя.
2. Введения электрической связи датчика положения электромеханического замка реверсивного устройства с электронным регулятором двигателя, что обеспечивает сохранение контроля за положением электромеханического замка при отказе электронного блока управления.
3. Введения электрической связи датчика рычага управления двигателем с электронным регулятором двигателя для обеспечения входного воздействия в электронный регулятор двигателя с целью формирования управляющих команд в электронный блок управления для открытия или закрытия реверсивного устройства.
4. Введения дублирования каналов электронного регулятора двигателя и дублирования каналов электронного блока управления реверсивным устройством.
5. Исключения применения датчиков примыкания релейного типа (сигнализаторов) для контроля открытого или закрытого положения створки. Введения датчиков, обеспечивающих измерение текущих перемещений подвижных элементов привода, соединенных с подвижной частью реверсивного устройства.
Техническая проблема решается тем, что в электромеханической системе управления реверсивным устройством газотурбинного двигателя, содержащей электронный регулятор двигателя, электронный блок управления электромеханическими приводными органами, по меньшей мере, один блок электромеханических приводных органов для открытия или закрытия реверсивного устройства, который включает, по меньшей мере, электродвигатель, винтовую передачу и механизм стопорения электродвигателя; датчик положения подвижной части реверсивного устройства, электромеханический замок реверсивного устройства, датчик положения электромеханического замка реверсивного устройства, рычаг управления двигателем с выключателем для коммутации электрической цепи электромеханического замка после перевода рычага управления двигателем на площадку работы реверсивного устройства, при этом выход электронного регулятора двигателя соединен с входом электронного блока управления, первый выход электронного блока управления соединен с блоком электромеханических приводных органов, а второй выход электронного блока управления соединен с входом электронного регулятора; бортовую систему регистрации и индикации параметров полетной информации, согласно изобретению, дополнительно введен датчик положения рычага управления двигателем, который соединен с электронным регулятором двигателя, выходы датчика положения электромеханического замка реверсивного устройства соединены с входами электронного регулятора двигателя; электронный регулятор двигателя содержит, по меньшей мере, два канала управления, электронный блок управления содержит, по меньшей мере, два канала управления; при этом электронный регулятор двигателя имеет возможность обмена информацией между каналами электронного регулятора и передачи информации в бортовую систему регистрации и индикации параметров полетной информации; электронный блок управления электромеханическим приводом имеет возможность обмена информацией между каналами электронного блока управления, а также возможность выявления отказа блока электромеханических приводных органов и передачи информации об исправном состоянии блока электромеханических приводных органов в каждый канал электронного регулятора двигателя, при этом электронный блок управления также имеет возможность передачи информации о работе электромеханического привода реверсивного устройства в бортовую систему регистрации и индикации параметров полетной информации; а датчик положения подвижной части реверсивного устройства имеет возможность измерения текущего положения подвижной части реверсивного устройства.
Кроме того, согласно изобретению, датчик положения подвижной части реверсивного устройства представляет собой датчик линейного перемещения выдвижного штока электромеханического привода, соединенного с подвижной частью реверсивного устройства или датчик угла поворота инкрементального или абсолютного типа, соединенный с винтовой передачей электромеханического привода.
Кроме того, согласно изобретению, датчик угла поворота инкрементального или абсолютного типа представляет собой резольвер, фотоимпульсный энкодер или датчик, работающий на эффекте Холла.
Кроме того, согласно изобретению, содержит три блока электромеханических приводных органов для управления реверсивным устройством решетчатого типа, при этом каждый блок электромеханического приводного органа содержит механизм стопорения, а электронный блок управления выполнен с возможностью 150% увеличения мощности работы двух любых электромеханических приводов после выявления отказа одного электромеханического привода и с возможностью отключения механизма стопорения отказавшего электромеханического привода.
Кроме того, согласно изобретению, бортовая система регистрации и индикации параметров полетной информации представляет собой автономное интегрированное устройство сбора, регистрации и контроля параметров двигателя, содержащее блок регистрации параметров двигателя и/или блок мониторинга параметров двигателя и/или бортовую систему технического обслуживания.
Кроме того, согласно изобретению, передача информации (информационных сигналов) из электронного блока управления в каждый канал электронного регулятора двигателя, а также передача информации из электронного блока управления в бортовую систему регистрации и индикации параметров полетной информации осуществляется в последовательном или параллельном коде с использованием любого известного интерфейса, их реализующего.
Кроме того, согласно изобретению, передача информации в последовательном цифровом коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
Электромеханическая система управления реверсивным устройством газотурбинного двигателя содержит электронный регулятор двигателя, электронный блок управления электромеханическими приводными органами, по меньшей мере, один блок электромеханических приводных органов для открытия или закрытия реверсивного устройства, который включает, по меньшей мере, электродвигатель, винтовую передачу и механизм стопорения электродвигателя; датчик положения подвижной части реверсивного устройства, электромеханический замок реверсивного устройства, датчик положения электромеханического замка реверсивного устройства, рычаг управления двигателем с выключателем для коммутации электрической цепи электромеханического замка после перевода рычага управления двигателем на площадку работы реверсивного устройства, при этом выход электронного регулятора двигателя соединен с входом электронного блока управления, первый выход электронного блока управления соединен с блоком электромеханических приводных органов, а второй выход электронного блока управления соединен с входом электронного регулятора; бортовую систему регистрации и индикации параметров полетной информации.
В отличии от прототипа, дополнительно введен датчик положения рычага управления двигателем, который соединен с электронным регулятором двигателя, выходы датчика положения электромеханического замка реверсивного устройства соединены с входами электронного регулятора двигателя; электронный регулятор двигателя содержит по меньшей мере два канала управления, электронный блок управления содержит по меньшей мере два канала управления; при этом электронный регулятор двигателя имеет возможность обмена информацией между каналами электронного регулятора и передачи информации в бортовую систему регистрации и индикации параметров полетной информации; электронный блок управления электромеханическим приводом имеет возможность обмена информацией между каналами электронного блока управления, а также возможность выявления отказа блока электромеханических приводных органов и передачи информации об исправном состоянии блока электромеханических приводных органов в каждый канал электронного регулятора двигателя, при этом электронный блок управления также имеет возможность передачи информации о работе электромеханического привода реверсивного устройства в бортовую систему регистрации и индикации параметров полетной информации; а датчик положения подвижной части реверсивного устройства имеет возможность измерения текущего положения подвижной части реверсивного устройства.
Кроме того, датчик положения подвижной части реверсивного устройства представляет собой датчик линейного перемещения выдвижного штока электромеханического привода, соединенного с подвижной частью реверсивного устройства или датчик угла поворота инкрементального или абсолютного типа, соединенный с винтовой передачей электромеханического привода.
Кроме того, датчик угла поворота инкрементального или абсолютного типа представляет собой резольвер, фотоимпульсный энкодер или датчик, работающий на эффекте Холла.
Кроме того, электромеханическая система управления содержит три блока электромеханических приводных органов для управления реверсивным устройством решетчатого типа, при этом каждый блок электромеханического приводного органа содержит механизм стопорения электродвигателя, а электронный блок управления выполнен с возможностью 150% увеличения мощности работы двух любых электромеханических приводов после выявления отказа одного электромеханического привода и с возможностью отключения механизма стопорения отказавшего электромеханического привода.
Кроме того, бортовая система регистрации и индикации параметров полетной информации представляет собой автономное интегрированное устройство сбора, регистрации и контроля параметров двигателя, содержащее блок регистрации параметров двигателя и/или блок мониторинга параметров двигателя и/или бортовую систему технического обслуживания.
Кроме того, передача информации (информационных сигналов) из электронного блока управления в каждый канал электронного регулятора двигателя, а также передача информации из электронного блока управления в бортовую систему регистрации и индикации параметров полетной информации осуществляется в последовательном или параллельном коде с использованием любого известного интерфейса, их реализующего.
Кроме того, передача информации в последовательном коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
Использование предлагаемого изобретения позволяет повысить надежность и отказобезопасность электромеханической системы, повысить безопасность полетов, снизить массу, стоимость и сложность газотурбинного двигателя.
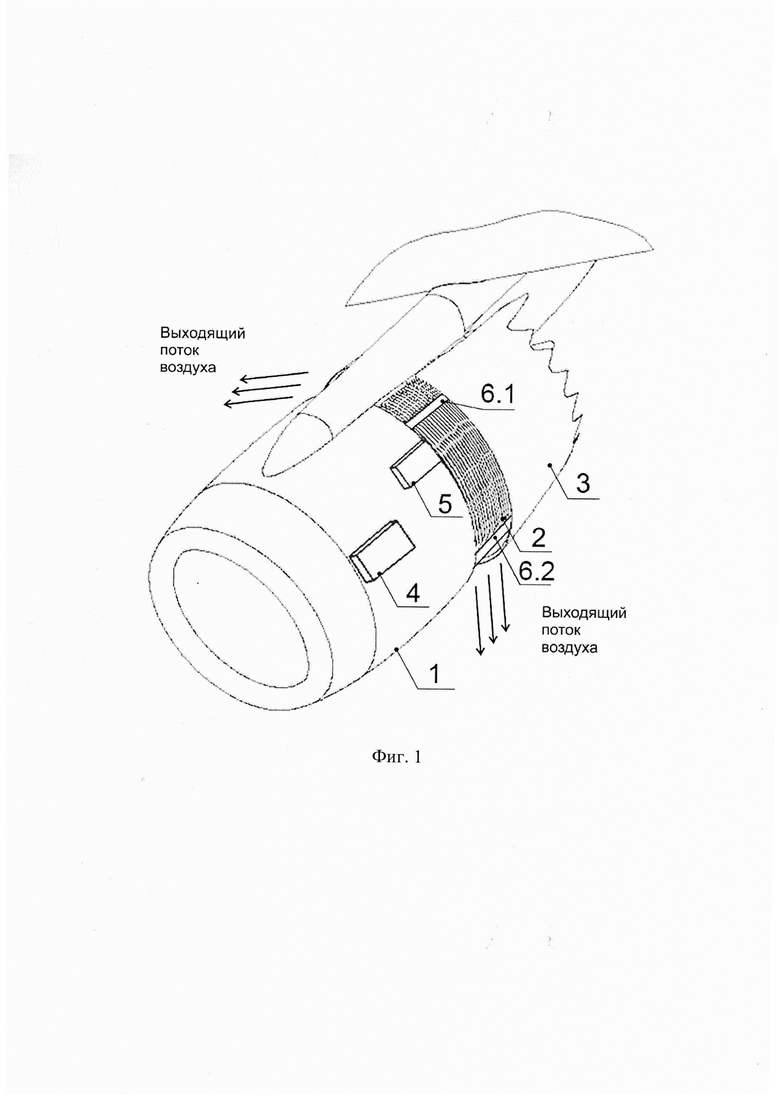
На фиг. 1 представлен общий вид газотурбинного двигателя 1 с реверсивным устройством решетчатого типа, содержащим неподвижную часть 2 и подвижную часть 3.
В общем случае на корпусе двигателя размещены электронный регулятор 4 двигателя, электронный блок 5 управления реверсивным устройством, три блока электромеханических приводных органов 6.1, 6.2 и 6.3 (на фиг. 1 показаны 6.1 и 6.2, 6.3 не показан). Реверсивное устройство на фиг. 1 представлено в открытом положении.
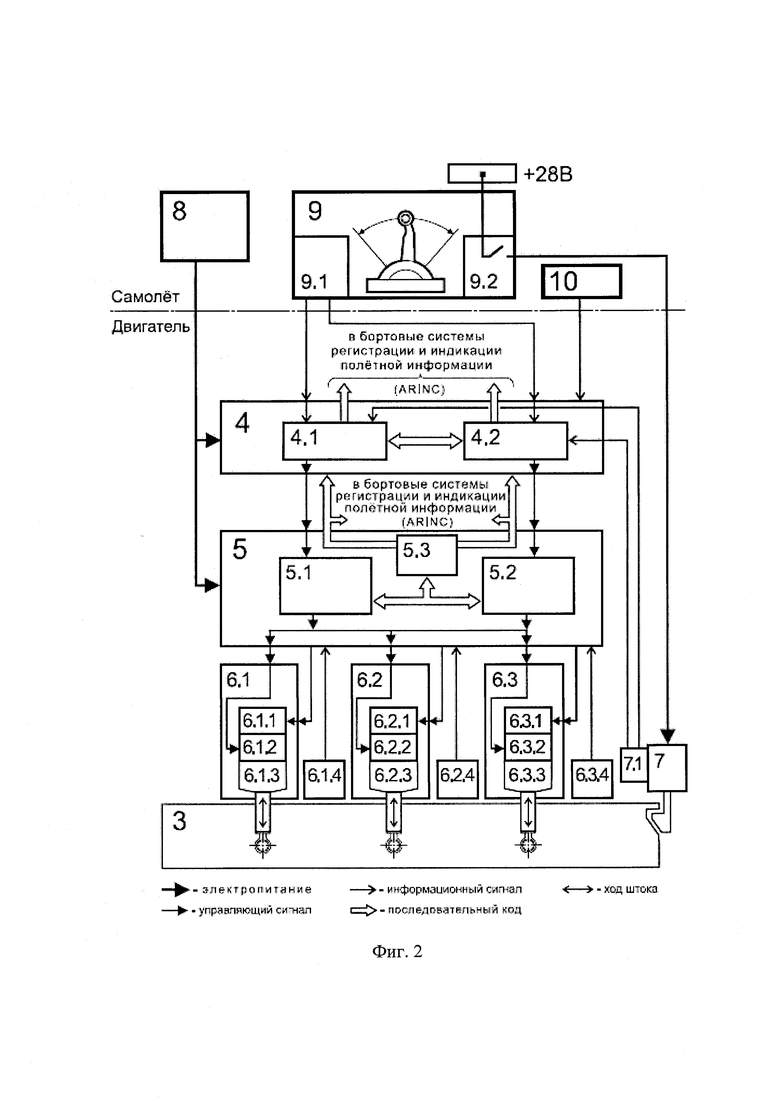
На фиг. 2 представлена блок-схема, иллюстрирующая пример реализации электромеханической системы управления реверсивным устройством газотурбинного двигателя.
В состав блок-схемы входит подвижная часть (обтекатель) 3 реверсивного устройства, 4 - электронный регулятор двигателя, включающий первый канал 4.1 управления и второй канал 4.2 управления; 5 - электронный блок управления реверсивным устройством (блок), включающий первый канал 5.1 и второй канал 5.2, модуль 5.3 встроенного контроля электронного блока управления.
Электронный регулятор 4 двигателя представляет специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации и формирования управляющих и информационных сигналов согласно заданным алгоритмам работы. Электронный регулятор 4, в соответствии с заложенными программами управления, обеспечивает управление расходом топлива в камере сгорания двигателя, выдачу управляющих дискретных команд на включение и выключение реверсивного устройства и др., что обеспечивает в конечном итоге необходимый уровень реактивной тяги двигателя.
Электронный регулятор 4 двигателя является основным управляющим блоком электронной цифровой системы автоматического управления двигателем типа FADEC, взаимодействующие элементы которой на фиг. 1 не показаны (кроме элементов управления реверсивным устройством), но всем специалистам в области автоматического управления современных газотурбинных двигателей они хорошо известны. В патентной и иностранной технической литературе электронный регулятор 4 двигателя именуется как электронный контроллер двигателя EEC (electronic engine controller), блок управления двигателем ECU (engine control unit), блок DECU (Digital Electronic Control Unit) или электронный регулятор FADEC.
Для повышения надежности работы и отказоустойчивости системы в составе электронного регулятора применяется два идентичных канала 4.1 и 4.2. Кроме того, для помехоустойчивости системы целесообразно, чтобы управляющие команды из обоих каналов электронного регулятора 4 двигателя в электронный блок 5 на открытие и закрытие реверсивного устройства представляли собой дискретные электрические сигналы+28 В постоянного тока 0,01-0,02 А.
Электронный регулятор 4 двигателя имеет возможность обмена информацией между каналами 4.1, 4.2, а также возможность передачи информации в бортовую систему регистрации и индикации параметров полетной информации (без позиции) и возможность приема информации из электронного блока 5 о его работе в последовательном (цифровом) коде, например, по стандарту ARJNC-429.
Электронный блок 5 управления осуществляет управление, контроль и синхронизацию работы всех блоков электромеханических приводных органов. Электронный блок 5 управления имеет возможность обмена Информацией между каналами 5.1, 5.2 электронного блока. Обеспечена также возможность выявления отказов блоков электромеханических приводных органов, реализованная с помощью модуля 5.3 встроенного контроля электронного блока управления и передачи информации о состоянии блоков электромеханических приводных органов в каждый канал электронного регулятора 4. Передача информации о состоянии и работе электромеханического привода реверсивного устройства (информационных сигналов) из электронного блока управления в каждый канал электронного регулятора двигателя, а также передача информации из электронного блока управления в бортовую систему регистрации и индикации параметров полетной информации осуществляется в последовательном или параллельном коде с использованием любого известного интерфейса, их реализующего, например, по стандарту ARINC-429.
Передача информации в последовательном коде из электронного регулятора 4 и электронного блока 5 может осуществляться через витую и экранированную пару проводов или через волоконно-оптические линии связи.
Электромеханическая система управления содержит три блока электромеханических приводных органов для управления реверсивным устройством решетчатого типа. Это блоки: первый 6.1 - блок электромеханических приводных органов, второй 6.2 - блок электромеханических приводных органов и третий 6.3 - блок электромеханических приводных органов, каждый из которых представляет собой идентичный электромеханизм реверсивного поступательного действия. при этом каждый блок электромеханического приводного органа содержит механизм стопорения. Электронный блок управления выполнен с возможностью 150% увеличения мощности работы двух любых электромеханических приводов после выявления отказа одного электромеханического привода и с возможностью отключения механизма стопорения отказавшего электромеханического привода.
В состав каждого блока электромеханических приводных органов входит механизм стопорения электродвигателя - электромагнитная тормозная муфта (6.1.1, 6.2.1 и 6.3.1 для соответствующего блока), электродвигатель (6.1.2, 6.2.2 и 6.3.2 соответственно), винтовая передача с выдвижным штоком (6.1.3, 6.2.3 и 6.3.3 соответственно), датчики положения подвижной части реверсивного устройства 6.1.4, 6.2.4 и 6.3.4.
Электромагнитная тормозная муфта (6.1.1, 6.2.1 и 6.3.1 для соответствующего блока) в обесточенном состоянии заторможена, что обеспечивает удержание (фиксацию) вала электродвигателя и препятствует самопроизвольной перекладке реверсивного устройства. При растормаживании электромагнитной тормозной муфты по управляющей команде из электронного блока 5 и после подачи электропитания на электродвигатель из блока 5, электродвигатель (6.1.2, 6.2.2 и 6.3.2 соответственно) осуществляет вращение вала винтовой передачи, что приводит к линейному перемещению выдвижного штока. Поскольку выдвижной шток механически соединен с подвижной частью реверсивного устройства, то обеспечивается перемещение подвижной части 3 (обтекателя) реверсивного устройства и его перекладка.
Датчик положения подвижной части реверсивного устройства (6.1.4, 6.2.4 и 6.3.4) имеет возможность измерения текущего положения подвижной части реверсивного устройства.
Кроме того, датчик положения подвижной части реверсивного устройства представляет собой датчик линейного перемещения выдвижного штока электромеханического привода, соединенного с подвижной частью реверсивного устройства или датчик угла поворота инкрементального или абсолютного типа, соединенного с винтовой передачей электромеханического привода. Датчик угла поворота инкрементального или абсолютного типа представляет собой резольвер, фотоимпульсный энкодер или датчик, работающий на эффекте Холла.
В качестве винтовой передачи может быть использован роликовинтовой, шариковинтовой или иной преобразователь движения из вращательного в поступательное.
Основным датчиком положения штока винтовой передачи является датчик линейного перемещения выдвижного штока электромеханического привода (электромеханизма), выходной сигнал которого обрабатывается в блоке 5. В случае отказа датчика линейного перемещения штока в системе применяется датчик угла поворота винтовой передачи, выходной сигнал которого также функционально связан с положением штока винтовой передачи.
В состав электромеханической системы управления реверсивным устройством также входит электромеханический замок 7 реверсивного устройства, датчик положения 7.1 (датчик-сигнализатор) электромеханического замка реверсивного устройства, блок 8 - бортовая система электроснабжения, 9 - рычаг управления двигателем с датчиком 9.1 положения рычага управления двигателя (РУД) и с размещенным на этом рычаге концевым выключателем 9.2.
В качестве датчика положения 7.1 электромеханического замка реверсивного устройства могут быть использованы любые известные переключатели российского производства типа ПКТ-6М и/или западного типа FT8377937. Указанные датчики представляет собой нормально разомкнутую контактную группу. При механическом нажатии элементами конструкции замка на подвижный шток датчика - сигнализатора 7.1 происходит замыкание контактной группы, которое фиксируется обоими каналами электронного регулятора двигателя. Предпочтительно, чтобы замыкаемые контактные группы были гальванически развязаны между собой.
В качестве датчика 9.1 измерения угла положения РУД могут быть использованы известные датчики углового перемещения, например, синусно-косинусные вращающиеся трансформаторы типа ДБСКТ, но предпочтительно применять индукционные датчики типа RVDT - Rotary Variable Differential Transformer (по одному датчику для каждого канала электронного регулятора 4). Связь датчиков RVDT с РУД механическая, поэтому каждому угловому положению РУД соответствует определенное значение угла поворота датчика RVDT. Датчики располагают непосредственно в блоке рычагов управления двигателями, размещенном на центральном пульте управления в кабине экипажа для управления реактивной тягой двигателей. Каждому угловому положению РУД соответствует определенное значение тяги двигателя.
Концевой выключатель 9.2 представляет собой концевой выключатель для коммутации электрических цепей постоянного тока. Концевой выключатель 9.2 также механически соединен с РУД, контакты этого выключателя замыкаются после перевода РУД на площадку работы реверсивного устройства. После замыкания контактов обеспечивается прохождение напряжения +28В на электромеханический замок 7 и его открытие.
В состав электромеханической системы управления реверсивным устройством также входит блок 10 информационного дискретного сигнала о нахождении самолета в воздухе. В качестве датчиков, идентифицирующих положение самолета в воздухе или его пробег по взлетно-посадочной полосе, могут быть использованы датчики-сигнализаторы обжатия шасси, датчики касания колесами полосы, высотомеры и др. Выход блока 10 соединен со входом электронного регулятора 4 двигателя.
Предлагаемая электромеханическая система управления реверсивным устройством газотурбинного двигателя работает следующим образом.
В полете управление реактивной тягой авиационного газотурбинного двигателя обеспечивается путем перемещения рычага 9 управления двигателем в необходимое положение. Угол положения РУД в течение всего полета измеряется с помощью датчика 9.1 и анализируется в электронном регуляторе 4 двигателя для автоматического поддержания заданного уровня тяги двигателя. Включение реверса тяги в воздухе не происходит, так как электромеханический замок 7 реверсивного устройства закрыт, а в электронном регуляторе 4 формирование управляющего сигнала на включение реверса заблокировано из-за нахождения самолета в воздухе, что определяется на основе информационного сигнала из блока 10. Включение реверсивного устройства также блокируется, если РУД находится вне зоны работы реверсивного устройства, например, на площадке малого газа или полетного малого газа.
Перекладка реверсивного устройства также невозможна из-за стопорения вала электродвигателя тормозной муфтой.
После приземления самолета и касания опор шасси самолета взлетно-посадочной полосы, которое определяют по наличию соответствующего выходного сигнала из блока 10, для автоматического включения реверсивного устройства и, следовательно, торможения самолета, экипаж переводит РУД из положения полетный малый газ («Арргоасп idle») или малый газ («idle») в положение для включения реверсивного устройства. Например, в положение минимальной обратной тяги, а затем в положение максимальной обратной тяги. В результате этого перемещения РУД контакты выключателя 9.2 замыкаются, происходит коммутация электрической цепи и формирование управляющего воздействия +28В в электромеханический замок 7 реверсивного устройства. Замок открывается, что делает возможной дальнейшую перекладку реверсивного устройства. Как следствие открытия замка 7 срабатывает датчик-сигнализатор 7.1 положения замка, выходные сигналы с которого поступает в оба канала электронного регулятора 4. Данный информационный сигнал (открытие замка) идентифицируется электронным регулятором как необходимое условие для включения реверса тяги.
Кроме того, перемещение РУД постоянно регистрируется электронным регулятором 4 двигателя с помощью датчика 9.1. Перевод РУД в положение включения реверсивного устройства также является необходимым условием для включения реверса тяги и фактически признаком намерения экипажа начать торможение самолета с помощью реверсивного устройства. В результате на выходе электронного регулятора 4 из его обоих каналов 4.1 и 4.2 формируется управляющее воздействие в электронный блок управления 5, на выходе блока 5 формируются три управляющих воздействия для растормаживания электромагнитных тормозных муфт 6.1.1, 6.2.1 и 6.3.1 и также подается электропитание в каждый из трех электродвигателей 6.1.2, 6.2.2 и 6.3.2 электромеханических приводов 6.1, 6.2 и 6.3. После растормаживания муфт и включения в работу трех электродвигателей штоки винтовой передачи 6.1.3, 6.2.3 и 6.3.3 выдвигаются и происходит перевод подвижной части 3 реверсивного устройства в положение обратной тяги.
В процессе включения реверсивного устройства его подвижная часть 3 (обтекатель) сдвигается назад, открывая решетки с окнами для выхода воздуха из наружного контура ГТД. При этом створки реверсивного устройства (не показаны) также перемещаются и перекрывают канал наружного контура двигателя, что препятствует истечению газов наружного контура из сопла двигателя. Поток воздуха наружного контура тормозится створками, затем решетками реверсивного устройства направляется в сторону, противоположную движению самолета, тем самым создавая обратную тягу.
Кроме того, после перевода РУД с площадки минимальной обратной тяги на площадку максимальной обратной тяги с помощью электронного регулятора 5 двигателя происходит автоматическое увеличение расхода топлива в камере сгорания и последующее увеличение режима работы газогенератора двигателя, как следствие, увеличение обратной тяги до максимального значения и энергичное торможение самолета.
В заявляемой электромеханической системе в процессе перекладки реверсивного устройства блок 5 осуществляет электрическую синхронизацию работы блоков 6.1, 6.2 и 6.3 электромеханических приводных органов без использования синхронизирующих механических устройств. В частности, блок управления 5 может устранять разность хода, когда один из штоков блоков 6.1, 6.2 и 6.3 перемещается быстрее или медленнее, чем другой, например, из-за различного фрикционного сопротивления на направляющих перемещения подвижной части реверсивного устройства вследствие загрязнения. Для устранения разности хода на основе данных датчиков 6.1.3, 6.2.3 и 6.3.3, контролирующих положение выдвижных штоков, в блоке 5 осуществляется снижение мощности одного привода и/или увеличение мощности другого привода за счет изменения частоты вращения электродвигателя.
В конце послепосадочного пробега при скорости самолета, до возможного попадания реверсивных струй газов в двигатель, экипаж выключает реверсивное устройство последовательно перемещая РУД на площадку минимальной обратной тяги и далее на малый газ. В результате на основе данных о положении РУД электронный регулятор 4 формирует управляющие воздействия в электронный блок 5 на выключение реверсивного устройства, далее с выхода блока 5 также формируются соответствующие воздействия в блоки электромеханических приводных органов 6.1, 6.2 и 6.3, в результате чего происходит реверсивное вращение электродвигателей, возврат выдвижных штоков винтовой передачи в исходное состояние и перекладка реверсивного устройства в положение прямой тяги. Также происходит стопорение (фиксация) роторов электродвигателей путем обесточивания тормозных муфт. Одновременно с переводом РУД на площадку основных режимов работы двигателя происходит размыкание контактов 9.2, как следствие снятие питания +28В с электромеханического замка (замка) 7, далее замок 7 закрывается, тем самым блокируется самопроизвольное перемещение реверсивного устройства.
В случае маловероятного отказа одного из блоков электромеханических приводных органов 6.1, 6.2 и 6.3, например, из-за поломки электродвигателя или неисправности датчика положения штока винтовой передачи, модуль 5.3 встроенного контроля электронного блока управления выявляет данный тип отказа, при этом в электронном блоке 5 осуществляется 150% увеличение мощности работы двух других электромеханических приводов, а в отказавшем блоке электромагнитная тормозная муфта отключается (стопорения не происходит). Данного увеличения мощности достаточно для надежного включения и выключения реверсивного устройства при отказе одного из трех приводов.
В случае маловероятного отказа и выдачи из электронного блока управления ложного сигнала на отключение электромагнитной тормозной муфты любого из трех блоков перемещение реверсивного устройства в открытое состояние будет застопорено оставшимися двумя исправными блоками электромеханических приводов. Перемещение реверсивного устройства в открытое состояние будет также заблокировано и в более тяжелых по последствиям сочетаниях, например, когда одновременно сформировались ложных сигналы на две тормозные муфты или в ситуации, когда к ложному сигналу на отключение одной тормозной муфты добавился ложный сигнал на открытие электромеханического замка реверсивного устройства.
В случае маловероятного отказа электронного блока управления или блоков электромеханических приводных органов, у пилота имеется информация о текущем состоянии замка реверсивного устройства за счет электрической связи переключателя замка с электронным регулятором двигателя для принятия решения по дальнейшей эксплуатации двигателя.
В случае маловероятного отказа электронного регулятора двигателя передача информации о текущем состоянии замка реверсивного устройства также может прекратиться. Однако, как правило, в случае отказа электронного регулятора из состава цифровой системы типа FADEC осуществляют выключение двигателя. Но по последствиям такое выключение двигателя безопаснее, чем возможное самопроизвольное срабатывание реверсивного устройства в воздухе.
Для эффективной диагностики состояния электромеханической системы управления и бесперебойной эксплуатации двигателя в целом, целесообразна регистрация всех параметров состояния электромеханической системы управления, включая информацию об отказах и неисправностях.
Для решения этой задачи предпочтительно применение бортовой системы регистрации и индикации параметров полетной информации, представляющей собой автономное интегрированное устройство сбора, регистрации и контроля параметров двигателя, содержащее блок регистрации параметров двигателя и/или блок мониторинга параметров двигателя и/или бортовую систему технического обслуживания.
В общем случае применение таких систем и блоков регистрации параметров позволяет используя, например, высокоскоростной спутниковый интернет или иные радиотехнологии, в он-лайн режиме контролировать работу двигателя и его систем на земле, в условиях работы предприятия поставщика двигателя и/или эксплуатанта самолета.
Передача информации (информационных сигналов) из электронного блока управления в каждый канал электронного регулятора двигателя, а также передача информации из электронного блока управления в бортовую систему регистрации и индикации параметров полетной информации осуществляется в последовательном или параллельном коде с использованием любого известного интерфейса, их реализующего.
В качестве реверсивного устройства предпочтительно применение реверсивного устройства решетчатого типа. Подобная конструкция является достаточно распространенной и используется, например, в двигателе ПС-90А для самолетов Ил-96-300 и Ту-204/214, в двигателе Д-18Т для самолета АН-124 «Руслан», в двигателе Rolls-Royce Trent 500 для самолета А340-500/600, в двигателе V2500 для самолета А320-100/200 и др. Но в более общем случае могут быть применены иные конструкции реверсивного устройства, например, створчатого или ковшового типа, что может несколько изменить исполнительные механизмы электропривода и их количество.
В качестве электронного регулятора 4 может быть применен, например, российский электронный регулятор двигателя РЭД-14 разработки АО «ОДК-Стар», РФ, который представляет собой специализированный многопроцессорный цифровой вычислительный комплекс, работающий в реальном масштабе времени. Конструктивно электронный регулятор РЭД-14 выполнен в виде моноблока прямоугольного сечения, который размещается на корпусе двигателя (см. фиг. .1). В электронном регуляторе 4 типа РЭД-14 происходит измерение угла поворота РУД, параметров температуры и давления воздуха на входе в двигатель, а также измерение внутридвигательных параметров, таких, например, как частота вращения роторов двигателя, угол поворота входного направляющего аппарата компрессора, температура газов за турбиной низкого давления и др. Также в РЭД-14 осуществляется контроль входных информационных (дискретных) сигналов, необходимых для правильного автоматического управления двигателя. На основе полученной входной информации электронный регулятор двигателя, в соответствии с заложенными программами управления, обеспечивает управление расходом топлива в камере сгорания двигателя, регулирование положением входных направляющих аппаратов компрессора, включение и выключение клапанов перепуска воздуха, включение и выключение реверсивного устройства двигателя и др., что и обеспечивает в конечном итоге необходимый уровень реактивной тяги двигателя.
В качестве блока электромеханических приводных органов 6.1, 6.2 и 6.3 могут быть применены электромеханизмы, аналогичные техническому решению, раскрытому в патенте RU №175530 (МПК: F02K 1/76, B64D 29/00, B64D 31/00, публ. 07.12.2017).
Размещение электроприводов 6.1, 6.2 и 6.3 на двигателе предпочтительно выполнять по типу электрической системы привода реверсора тяги газотурбинного двигателя аналогично техническому решению, раскрытому в патенте RU №2697078 С1 (МПК F02K 1/76, публ. 12.08.2019).
В качестве электромеханического замка 7 (основной орган удержания или первичный фиксатор) может быть применен замок по типу технического решения, раскрытого в патенте RU №2669452 (МПК: F02K 1/76, F02K 1/766, публ. 11.10.2018).
Необходимо отметить, что организация электропитания электромеханической системы от блока 8 показана только для примера и не является целью настоящего изобретения. Специалистам в области самолетостроения и двигателестроения ясно, что для повышения отказоустойчивости и отказобезопасности электромеханической системы реверсивного устройства необходима организация дублированного электропитания, предпочтительно, от независимых источников системы энергоснабжения самолета.
В качестве блока 10 может быть использована система управления общесамолетным оборудованием СУОСО-МС-21 разработки акционерного общества «Ульяновское конструкторское бюро приборостроения», РФ. В качестве датчиков-сигнализаторов обжатия стоек (опор) шасси из состава блока 10 могут быть использованы любые известные устройства, например, концевые выключатели типа АМ800К, тензодатчики, индуктивные датчики перемещения, системы сигнализации типа «WoW» (weight-on-weels - вес на колесах).
В качестве автономного интегрированного устройства сбора, регистрации и контроля параметров двигателя, содержащего блок регистрации параметров двигателя, предпочтительно использовать устройство регистрации параметров авиационного газотурбинного двигателя аналогично техническому решению, раскрытому в патенте RU №2664901 (МПК: G01M 15/14, F02C 9/28, публ. 23.08.2018).
Заявляемый способ успешно прошел апробацию и обеспечил проведение различных типов стендовых и летных испытаний авиационного двигателя типа ПД-14 (головной разработчик АО «ОДК-Авиадвигатель», РФ), укомплектованного электронным регулятором двигателя типа РЭД-14 разработки АО «ОДК-СТАР», РФ и электромеханическим приводом реверсивного устройства разработки АО «Диаконт», РФ.
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет повысить надежность и отказобезопасность электромеханической системы управления реверсивным устройством, повысить безопасность полетов, снизить массу электрических коммуникаций, эксплуатационные затраты и в целом сложность газотурбинного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя с высоконадежным электропитанием | 2020 |
|
RU2757744C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ПРИ ПОСАДКЕ И ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2019 |
|
RU2730731C1 |
| Автономное интегрированное устройство сбора, регистрации и контроля параметров авиационного газотурбинного двигателя | 2019 |
|
RU2719757C1 |
| Отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя | 2020 |
|
RU2744587C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2783048C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЯГОЙ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ САМОЛЕТА | 2009 |
|
RU2393977C1 |
| Способ и устройство управления реверсированием тяги газотурбинного двигателя самолёта | 2024 |
|
RU2828300C1 |
| Автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя | 2017 |
|
RU2664901C1 |
| Способ управления газотурбинным двигателем при самопроизвольном открытии реверсивного устройства | 2021 |
|
RU2774010C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ АВИАЦИОННОГО ДВИГАТЕЛЯ ПРИ ТОРМОЖЕНИИ САМОЛЕТА | 2019 |
|
RU2719778C1 |
Изобретение относится к электромеханическим системам управления реверсивным устройством газотурбинного двигателя (ГТД) типа FADEC. Электромеханическая система управления реверсивным устройством газотурбинного двигателя (система) содержит электронный регулятор двигателя (РЭД), электронный блок управления электромеханическими приводными органами, по меньшей мере один блок электромеханических приводных органов для открытия или закрытия реверсивного устройства (РУ), который включает, по меньшей мере, электродвигатель, винтовую передачу и механизм стопорения электродвигателя; датчик положения подвижной части РУ, электромеханический замок РУ, датчик положения электромеханического замка РУ, рычаг управления двигателем с выключателем для коммутации электрической цепи электромеханического замка после перевода рычага управления двигателем на площадку работы РУ, при этом выход РЭД соединен с входом электронного блока управления, первый выход электронного блока управления соединен с блоком электромеханических приводных органов, а второй выход электронного блока управления соединен с входом РЭД; бортовую систему регистрации и индикации параметров полетной информации. Дополнительно введен датчик положения рычага управления двигателем, который соединен с РЭД, выходы датчика положения электромеханического замка РУ соединены с входами РЭД; РЭД содержит по меньшей мере два канала управления, электронный блок управления содержит по меньшей мере два канала управления; при этом РЭД имеет возможность обмена информацией между каналами электронного регулятора и передачи информации в бортовую систему регистрации и индикации параметров полетной информации; электронный блок управления электромеханическим приводом имеет возможность обмена информацией между каналами электронного блока управления, а также возможность выявления отказа блока электромеханических приводных органов и передачи информации об исправном состоянии блока электромеханических приводных органов в каждый канал РЭД. При этом электронный блок управления также имеет возможность передачи информации о работе электромеханического привода РУ в бортовую систему регистрации и индикации параметров полетной информации; а датчик положения подвижной части РУ имеет возможность измерения текущего положения подвижной части РУ. Предлагаемое изобретение позволяет повысить надежность и отказобезопасность электромеханической системы управления реверсивным устройством, повысить безопасность полетов, снизить массу электрических коммуникаций, эксплуатационные затраты и в целом сложность газотурбинного двигателя. 6 з.п. ф-лы, 2 ил.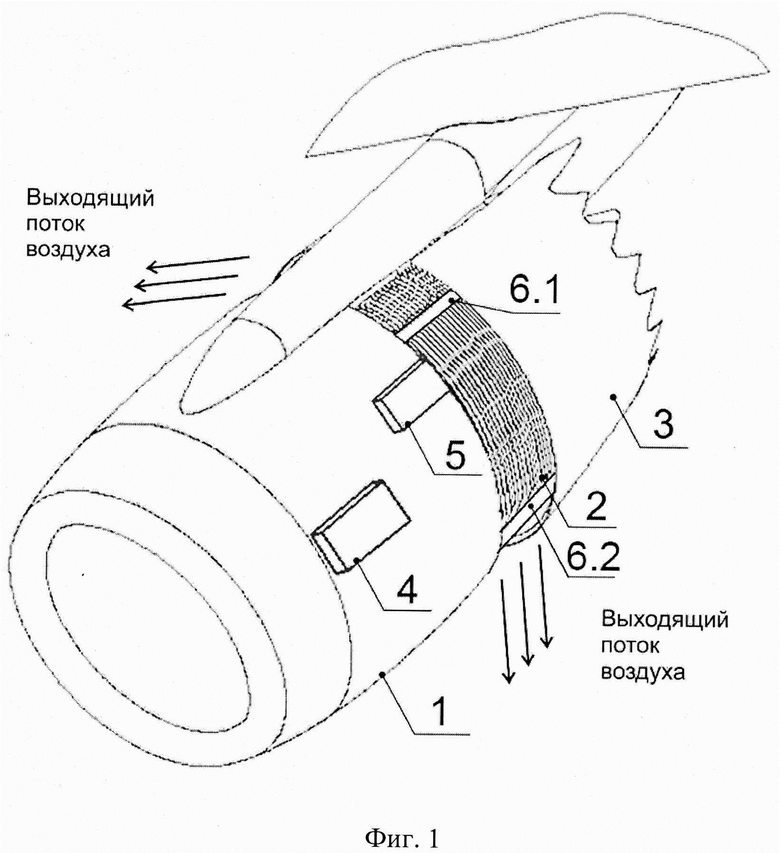
1. Электромеханическая система управления реверсивным устройством газотурбинного двигателя, содержащая электронный регулятор двигателя, электронный блок управления электромеханическими приводными органами, по меньшей мере один блок электромеханических приводных органов для открытия или закрытия реверсивного устройства, который включает, по меньшей мере, электродвигатель, винтовую передачу и механизм стопорения электродвигателя; датчик положения подвижной части реверсивного устройства, электромеханический замок реверсивного устройства, датчик положения электромеханического замка реверсивного устройства, рычаг управления двигателем с выключателем для коммутации электрической цепи электромеханического замка после перевода рычага управления двигателем на площадку работы реверсивного устройства, при этом выход электронного регулятора двигателя соединен с входом электронного блока управления, первый выход электронного блока управления соединен с блоком электромеханических приводных органов, а второй выход электронного блока управления соединен с входом электронного регулятора; бортовую систему регистрации и индикации параметров полетной информации, отличающаяся тем, что дополнительно введен датчик положения рычага управления двигателем, который соединен с электронным регулятором двигателя, выходы датчика положения электромеханического замка реверсивного устройства соединены с входами электронного регулятора двигателя; электронный регулятор двигателя содержит по меньшей мере два канала управления, электронный блок управления содержит по меньшей мере два канала управления; при этом электронный регулятор двигателя имеет возможность обмена информацией между каналами электронного регулятора и передачи информации в бортовую систему регистрации и индикации параметров полетной информации; электронный блок управления электромеханическим приводом имеет возможность обмена информацией между каналами электронного блока управления, а также возможность выявления отказа блока электромеханических приводных органов и передачи информации об исправном состоянии блока электромеханических приводных органов в каждый канал электронного регулятора двигателя, при этом электронный блок управления также имеет возможность передачи информации о работе электромеханического привода реверсивного устройства в бортовую систему регистрации и индикации параметров полетной информации; а датчик положения подвижной части реверсивного устройства имеет возможность измерения текущего положения подвижной части реверсивного устройства.
2. Электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 1, отличающаяся тем, что датчик положения подвижной части реверсивного устройства представляет собой датчик линейного перемещения выдвижного штока электромеханического привода, соединенного с подвижной частью реверсивного устройства, или датчик угла поворота инкрементального или абсолютного типа, соединенный с винтовой передачей электромеханического привода.
3. Электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 2, отличающаяся тем, что датчик угла поворота инкрементального или абсолютного типа представляет собой резольвер, фотоимпульсный энкодер или датчик, работающий на эффекте Холла.
4. Электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 1, отличающаяся тем, что содержит три блока электромеханических приводных органов для управления реверсивным устройством решетчатого типа, при этом каждый блок электромеханического приводного органа содержит механизм стопорения электродвигателя, а электронный блок управления выполнен с возможностью 150% увеличения мощности работы двух любых электромеханических приводов после выявления отказа одного электромеханического привода и с возможностью отключения механизма стопорения отказавшего электромеханического привода.
5. Электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 1, отличающаяся тем, что бортовая система регистрации и индикации параметров полетной информации представляет собой автономное интегрированное устройство сбора, регистрации и контроля параметров двигателя, содержащее блок регистрации параметров двигателя, и/или блок мониторинга параметров двигателя, и/или бортовую систему технического обслуживания.
6. Электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 1, отличающаяся тем, что передача информации (информационных сигналов) из электронного блока управления в каждый канал электронного регулятора двигателя, а также передача информации из электронного блока управления в бортовую систему регистрации и индикации параметров полетной информации осуществляется в последовательном или параллельном коде с использованием любого известного интерфейса, их реализующего.
7. Электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 6, отличающаяся тем, что передача информации в последовательном цифровом коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
| Автономное интегрированное устройство сбора, регистрации и контроля параметров авиационного газотурбинного двигателя | 2019 |
|
RU2719757C1 |
| US 8583294 B2, 12.11.2013 | |||
| US 6655125 B2, 02.12.2003 | |||
| WO 2009101370 A1, 20.08.2009 | |||
| Автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя | 2017 |
|
RU2664901C1 |

