ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к сиденьям, в частности, к управляемому поглощению энергии сиденьями при ударе.
УРОВЕНЬ ТЕХНИКИ
[002] Некоторые известные энергопоглощающие элементы сиденья транспортного средства (например, энергопоглощающие элементы для воздушного летательного аппарата, винтокрылого летательного аппарата и т.д.) выполнены с возможностью хода (например, смещения) при фиксированной нагрузке во время удара при аварии. В частности, известные энергопоглощающие элементы сиденья смещаются при номинальной ударной нагрузке на сиденье исходя из антропометрических данных среднего пассажира (например, 50 процентов роста и/или веса), номинальной доступной величины хода сиденья (например, доступного смещения сиденья) и/или конкретного условия удара во время аварии (конкретного сценария удара во время аварии).
[003] Изменения в антропометрических данных о занявшем отдельное место пассажире, которые содержат вес и/или рост, на основании антропометрических данных среднего пассажира могут уменьшить эффективность энергопоглощающих элементов сиденья. В частности, энергопоглощающие элементы сиденья, которые выполнены с возможностью обеспечения ударных нагрузок, соответствующих антропометрическим данным среднего пассажира, могут обеспечить избыточную ударную нагрузку (например, слишком большое усилие, приложенное к пассажиру, занявшему сиденье) или недостаточную ударную нагрузку (например, недостаточное поглощение энергии). Кроме того, отклонение от конкретного предполагаемого условия удара во время аварии в фактическом сценарии удара во время аварии может также привести к уменьшению эффективности энергопоглощающих элементов сиденья, поскольку известные энергопоглощающие элементы не учитывают условия, относящиеся к фактическому сценарию удара во время аварии (например, скорость, высоту, пространственное положение, рельеф местности, параметры воздушного летательного аппарата и т.д.).
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[004] Пример способа включает этап, согласно которому: определяют вес пассажира, занявшего сиденье воздушного летательного аппарата, и рассчитывают, с использованием процессора, ударную нагрузку на энергопоглощающий элемент сиденья, функционально соединенный с сиденьем, на основании веса пассажира. Пример способа также включает этап, согласно которому: настраивают энергопоглощающий элемент сиденья на рассчитанную ударную нагрузку.
[005] Пример устройства содержит датчик веса на сиденье воздушного летательного аппарата и энергопоглощающий элемент сиденья, функционально соединенного с сиденьем. Пример устройства также содержит привод, функционально соединенный с энергопоглощающим элементом сиденья, и процессор для расчета ударной нагрузки энергопоглощающего элемента сиденья на основании данных о весе пассажира от датчика веса, причем привод предназначен для регулирования энергопоглощающего элемента сиденья на основании рассчитанной ударной нагрузки.
[006] Пример физического машиночитаемого носителя содержит сохраненные на нем инструкции, которые, при их исполнении, обусловливают выполнение процессором устройства управления сиденьем воздушного летательного аппарата: приема веса пассажира от датчика веса сиденья и расчета ударной нагрузки энергопоглощающего элемента, функционально соединенного с сиденьем на основании принятых данных о весе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
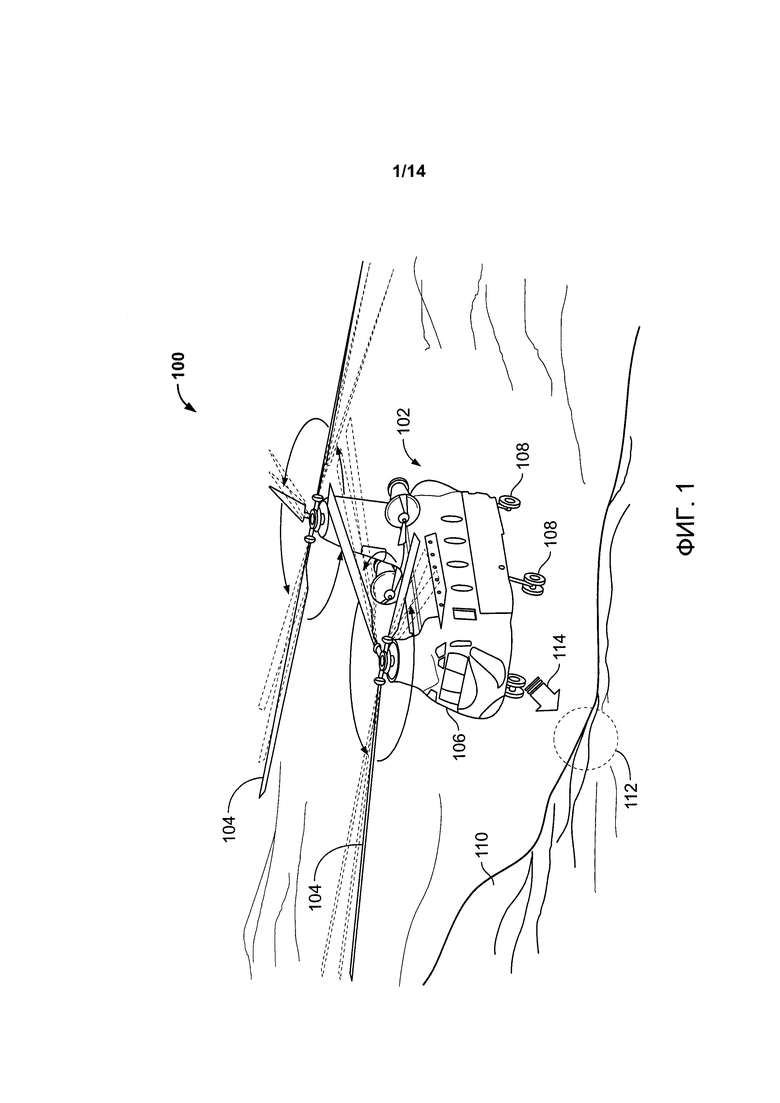
[007] На ФИГ. 1 показан пример винтокрылого летательного аппарата, в котором могут быть реализованы примеры, раскрытые в настоящем документе.
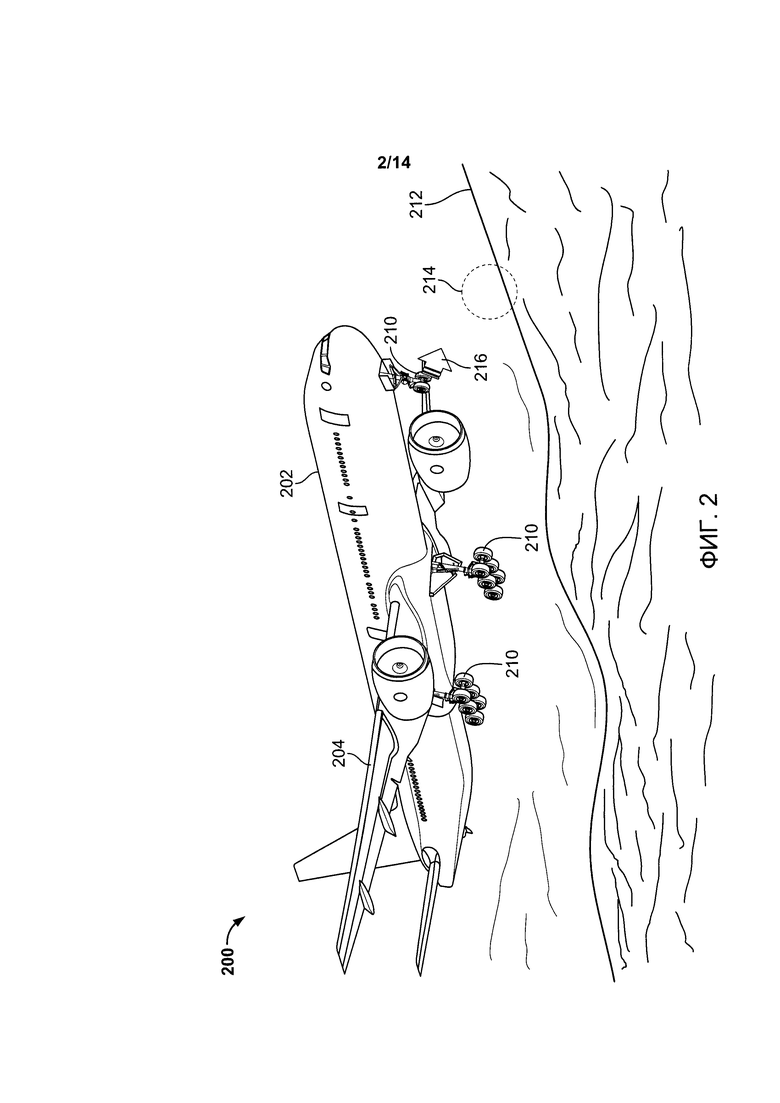
[008] На ФИГ. 2 показан пример воздушного летательного аппарата с фиксированным крылом, в котором могут быть реализованы примеры, раскрытые в настоящем документе.
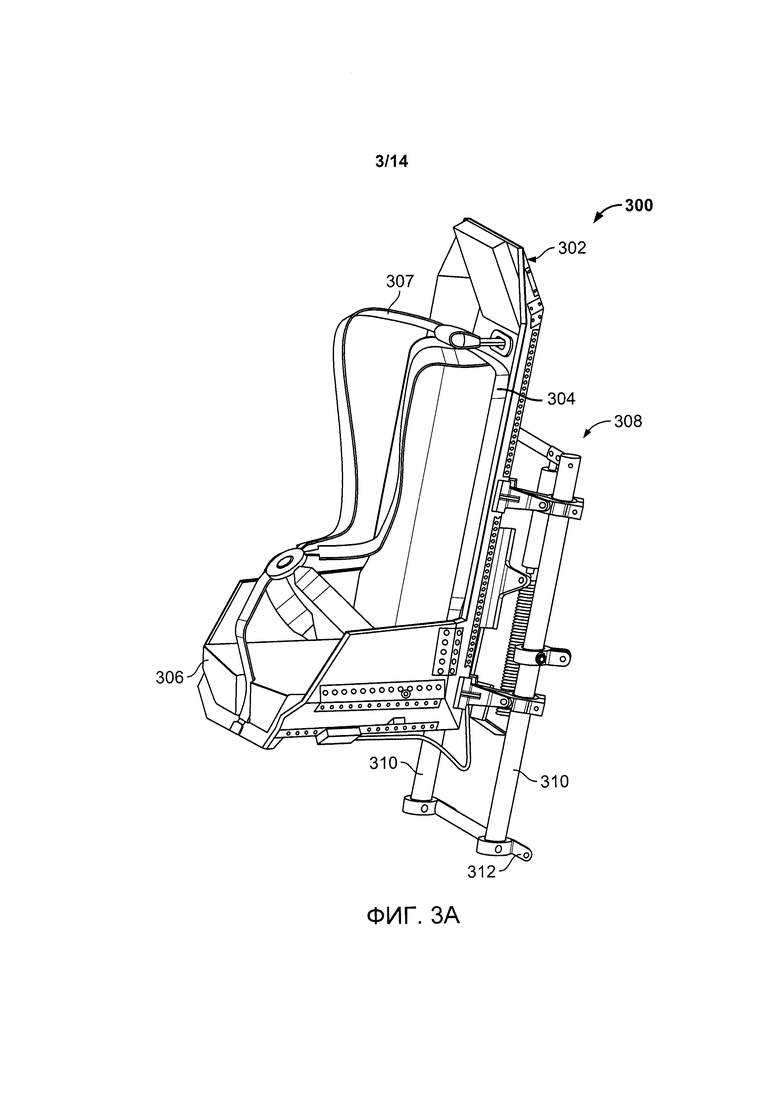
[009] На ФИГ. 3А показан пример сиденья в соответствии с вариантами реализации настоящего изобретения.
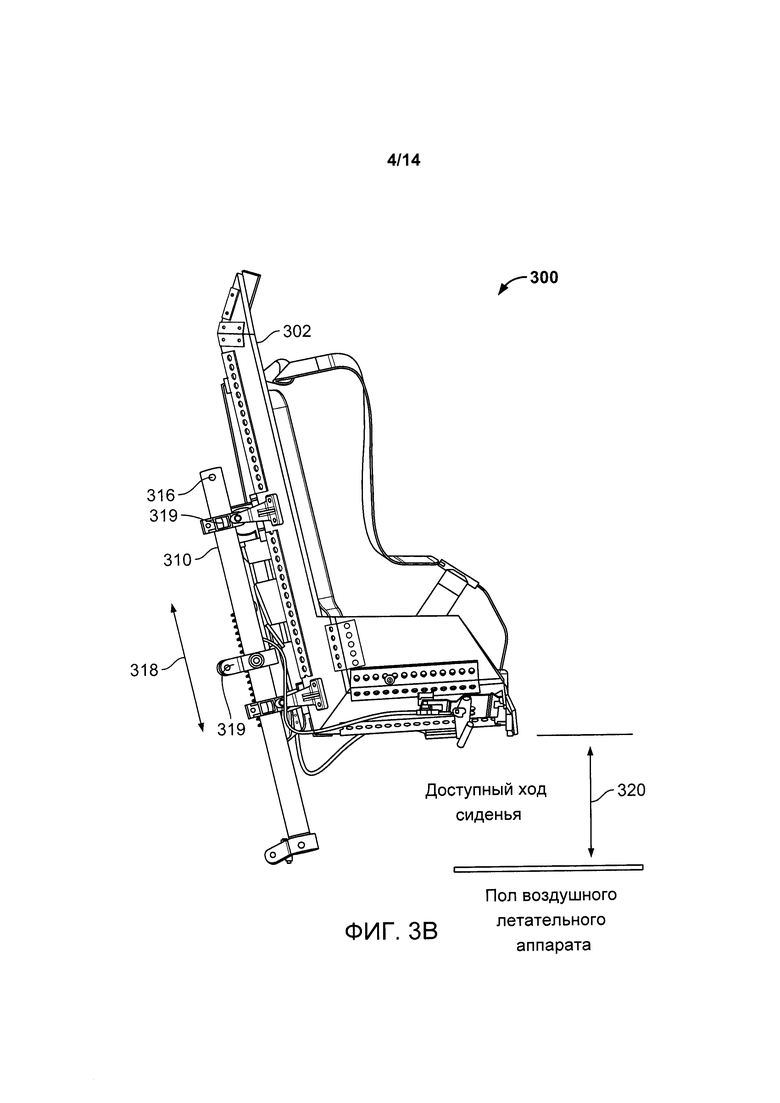
[0010] На ФИГ. 3В показан вид сбоку примера сиденья, показанного на ФИГ. 3А.
[0011] На ФИГ. 4 показан пример регулирующей системы для регулировки ударной нагрузки, используемой в примере сиденья, показанном на ФИГ. 3А и 3В.
[0012] На ФИГ. 5 показан еще один вид примера регулирующей системы для регулировки ударной нагрузки, показанной на ФИГ. 4.
[0013] На ФИГ. 6 показан разобранный общий вид примера регулирующей системы для регулировки ударной нагрузки, показанной на ФИГ. 4-5.
[0014] На ФИГ. 7 показан разобранный общий вид части корпусного блока примера регулирующей системы для регулировки ударной нагрузки, показанной на ФИГ. 4-6.
[0015] На ФИГ. 8 показан еще один вид примера регулирующей системы для регулировки ударной нагрузки, показанной на ФИГ. 4-7.
[0016] На ФИГ. 9 схематически показан вид примера архитектуры примера реализации регулирующей системы для регулировки ударной нагрузки, показанной на ФИГ. 4-7.
[0017] На ФИГ. 10 показан пример системы управления сиденьем, которая может быть использована для реализации примеров, раскрытых в настоящем документе.
[0018] На ФИГ. 11 показана блок-схема, иллюстрирующая пример способа, который может быть использован для реализации примеров, раскрытых в настоящем документе.
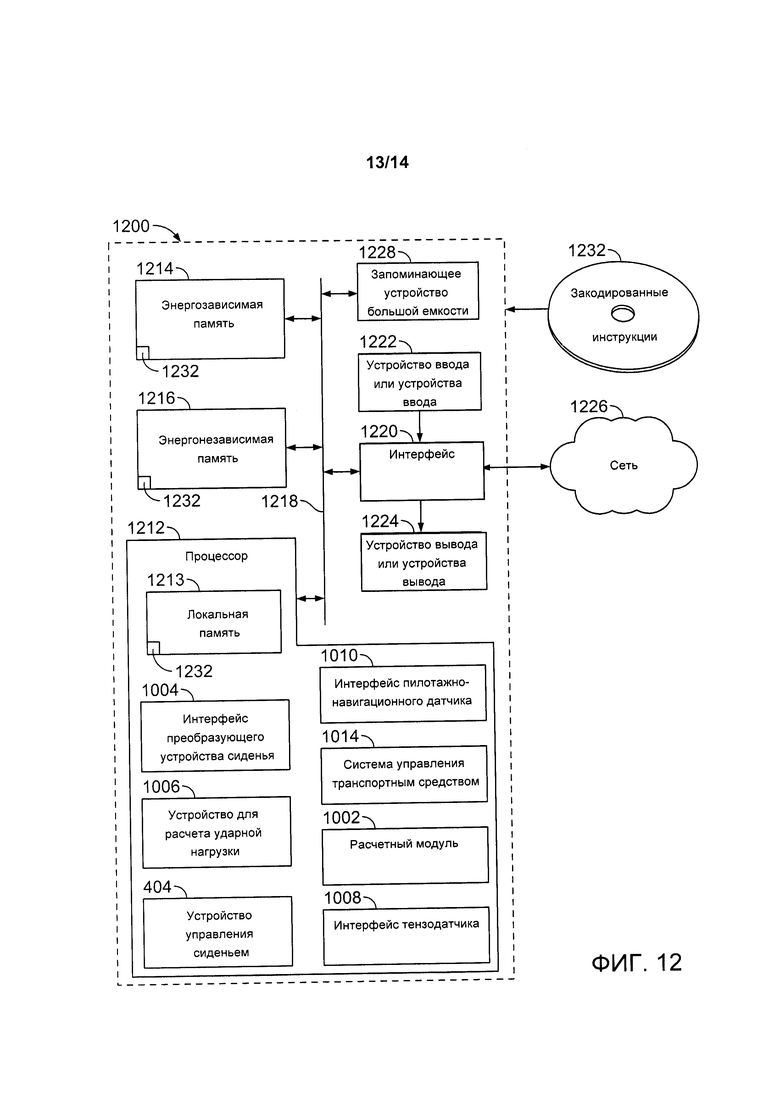
[0019] На ФИГ. 12 показана структурная схема примера процессорной платформы, выполненной с возможностью исполнения машиночитаемых инструкций для реализации примера способа, показанного на ФИГ. 11.
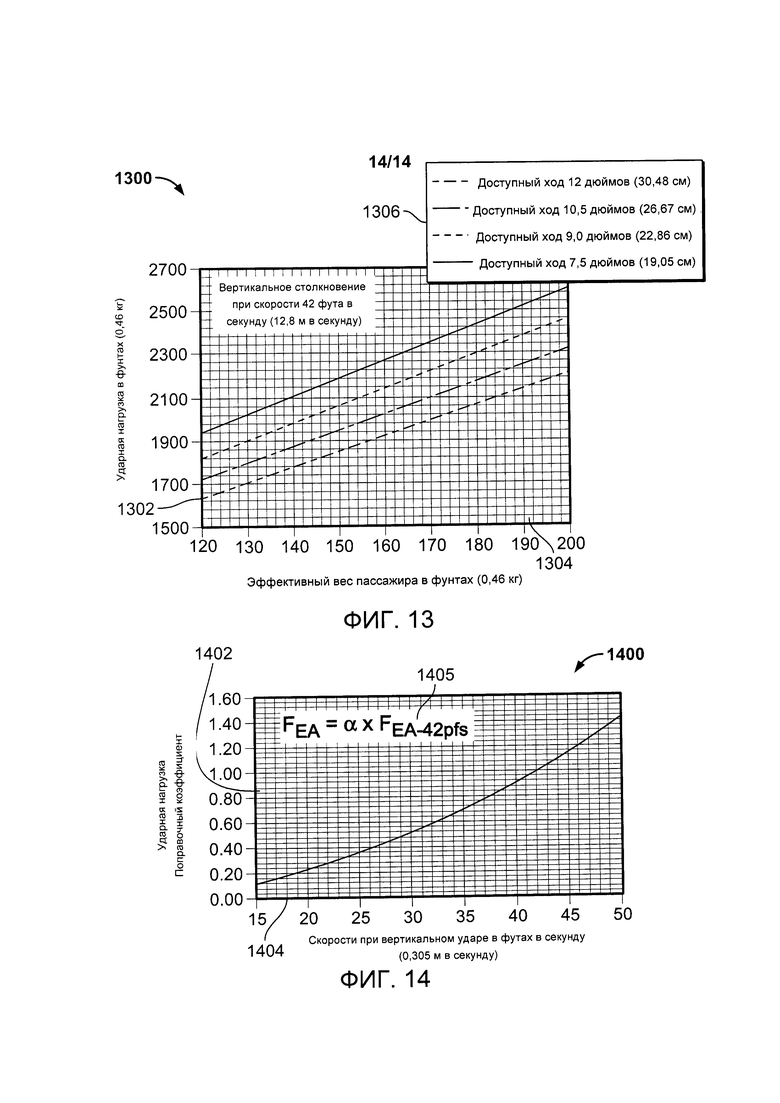
[0020] На ФИГ. 13 показан график, иллюстрирующий пример профиля данных, который может быть использован для определения ударной нагрузки на основании веса пассажира.
[0021] На ФИГ. 14 показан график, иллюстрирующий пример профиля данных для регулировки ударной нагрузки на основании прогнозируемой скорости удара во время аварии.
[0022] Чертежи представлены не в масштабе. Вместо этого для прояснения множества слоев и областей на чертежах толщина этих слоев может быть увеличена. Везде, где это возможно, одни и те же ссылочные номера будут использованы на всех чертежах и сопутствующем им описании для того, чтобы ссылаться на одни и те же части. При использовании в данном документе, указание на то, что какая-либо часть расположена на другой части каким-либо образом (например, расположенная на, помещенная на, размещенная на или образованная на и т.д.) означает, что эта часть находится в контакте с другой частью или над ней за счет наличия между ними одной или более промежуточных частей. Указание на то, что какая-либо часть находится в контакте с другой частью означает, что между этими двумя частями отсутствует какая-либо промежуточная часть.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0023] В настоящем документе раскрыто активно управляемое поглощение энергии сидений при ударе во время аварии. Некоторые известные энергопоглощающие элементы сиденья транспортного средства (например, энергопоглощающие элементы воздушного летательного аппарата с фиксированным крылом или винтокрылого летательного аппарата и т.д.) выполнены с возможностью обеспечения хода (например, смещения) при фиксированной нагрузке для уменьшения усилий при аварии, передаваемых пассажиру, занявшему сиденье, во время удара во время аварии. Эти известные энергопоглощающие элементы сиденья обычно смещаются при номинальной ударной нагрузке на сиденье, исходя из срединных/средних антропометрических данных среднего пассажира (например, 50 процентов), номинальной имеющейся длины хода сиденья и/или конкретного специального условия (конкретного сценария удара во время аварии).
[0024] Изменения антропометрических данных среди отдельных занявших сиденья пассажиров, которые могут содержать данные о весе и/или росте, по отношению к антропометрическим данным среднего пассажира могут уменьшить эффективность энергопоглощающих элементов сиденья. В частности, избыточные или неадекватные ударные нагрузки могут быть приложены к пассажиру, занявшему сиденье. Например, человек, который имеет вес, превышающий средний вес, может потребовать относительно более высокой ударной нагрузки, но может быть подвержен воздействию ударной нагрузки, уровень которой меньше необходимого уровня. Аналогичным образом, человек, вес которого меньше среднего веса, подвержен воздействию ударной нагрузки, уровень которой больше необходимого, что может привести к тому, что этот человек будет подвержен воздействию нагрузок, уровень которых превышает необходимый уровень. Кроме того, изменение фактического сценария удара во время аварии по отношению к конкретному предусмотренному условию может также привести к уменьшению эффективности энергопоглощающих элементов сиденья.
[0025] В некоторых известных сиденьях с энергопоглощающими устройствами ударная нагрузка может быть вручную отрегулирована/изменена операторами. В частности, оператор и/или летный экипаж может повернуть ручку (например, регулировочную ручку) или рукоятку для регулировки ударной нагрузки на основании визуального индикатора, который может обеспечить руководящие указания по степени регулировки ударной нагрузки на основании веса пассажира. Однако такие системы основаны на том, что отдельные лица вручную регулируют ударную нагрузку и/или помнят о необходимости регулировки ударной нагрузки на основании веса пассажира. Кроме того, такие индикаторы не регулируют величину веса, который в действительности прикладывают к сиденью (например, приложенный вес), которое может представлять собой более эффективный индикатор регулировки ударной нагрузки, поскольку пассажиры, занявшие сиденья, могут распределять свой вес и вес оборудования, перевозимого этими пассажирами, на переменную величину (например, часть веса пассажира может быть передана через ноги пассажиров на пол вместо сиденья). Кроме того, эти известные энергопоглощающие элементы сиденья с ручной регулировкой чувствительны к ошибкам регулировки, осуществляемой оператором, что также может привести к существенному уменьшению эффективности.
[0026] Примеры, раскрытые в настоящем документе, обеспечивают возможность индивидуального управления ударной нагрузкой и/или смещением хода энергопоглощающих элементов сиденья транспортного средства на основании антропометрических данных (например, вес, рост и т.д.) пассажира, занявшего сиденье в воздушном летательном аппарате, для более эффективного уменьшения усилий, прикладываемых к пассажирам во время удара во время аварии воздушного летательного аппарата. Примеры, раскрытые в настоящем документе, обеспечивают автоматический сбор антропометрических данных о пассажирах, занявших сиденья, и, таким образом, позволяют исключить зависимость от памяти человека и/или от получения человеком подсказки (например, посредством предполетного контрольного списка) посредством визуальных ориентиров для регулировки ударной нагрузки. Антропометрические данные могут содержать рост пассажира, который может быть основан на доступном ходе, обусловленном результатом регулировки положения сиденья и/или весом пассажира, приложенным к сиденью (например, эффективным весом или частью веса пассажира, который передается на сиденье).
[0027] Примеры, раскрытые в настоящем документе, используют сиденье, которое автоматически измеряет вес пассажира, занявшего сиденье (например, вес, приложенный к сиденью пассажиром) для регулировки ударной нагрузки на энергопоглощающий элемент сиденья. В некоторых примерах вес измеряют во время нахождения воздушного летательного аппарата на земле и/или в стационарном положении (например, перед взлетом). В некоторых примерах положение хода сиденья и/или имеющийся ход (например, доступное вертикальное смещение) сиденья учитывают при определении ударной нагрузки. В дополнительном или альтернативном варианте некоторые примеры, раскрытые в настоящем документе, используют условия удара (например, прогнозируемые условия удара) для регулировки и/или повторной регулировки ударной нагрузки (например, повторной регулировки ударной нагрузки после их задания/регулировки на основании веса и/или роста пассажира).
[0028] При использовании в настоящем документе термин «сиденье» может относиться к сиденью, чашке сиденья или блоку сиденья. Например, термин «сиденье» может относится к подвижной части сиденья или ко всему блоку сиденья.
[0029] На ФИГ. 1 показан винтокрылый летательный аппарат 100, в котором могут быть реализованы примеры, раскрытые в настоящем документе. Винтокрылый летательный аппарат 100 согласно показанному примеру содержит фюзеляж 102, несущие винты 104, кабину 106 фюзеляжа 102 и шасси 108. На виде, показанном на ФИГ. 1, винтокрылый летательный аппарат 100 показан в состоянии перед ударом о землю 110. В частности, винтокрылый летательный аппарат 100 показан в состоянии перед ударом об область 112 удара при перемещении в направлении, указанном стрелкой 114, которая представляет вектор удара винтокрылого летательного аппарата 100. В результате лица, находящиеся в кабине 106, могут быть подвержены действию усилий и/или ускорений/торможений при ударе, которые могут передаваться через сиденья, на которых они сидят. Многие известные системы поглощения энергии для таких сидений выполнены с возможностью обеспечения ударной нагрузки и/или смещения, которые основаны на срединных или средних биометрических характеристиках пассажира, стандартном смещении/стандартном ходе сиденья и/или стандартных условиях удара.
[0030] На ФИГ. 2 показан воздушный летательный аппарат 200 с фиксированным крылом, в котором могут быть реализованы примеры, раскрытые в настоящем документе. Пример воздушного летательного аппарата 200 содержит фюзеляж 202, крылья 204 и шасси 210. В данном примере шасси 210 находится в развернутом положении. На виде, показанном на ФИГ. 2, пример воздушного летательного аппарата 200 показан в состоянии перед ударом о землю 212 (например, во время аварийной посадки) и/или столкновением с ней. В частности, воздушный летательный аппарат 200 показан в состоянии перед ударом об область 214 удара во время перемещения в направлении, указанном стрелкой 216. В результате лица, находящиеся (например, летный экипаж, пассажиры и т.д.) в воздушном летательном аппарате 200, могут быть подвержены воздействию усилий и/или ускорений/торможений при ударе, которые могут передаться через сиденья пассажиров во время удара.
[0031] На ФИГ. 3А показан пример сиденья 300 (например, блок сиденья, установленное сиденье и т.д.) в соответствии с вариантами реализации настоящего изобретения. Сиденье 300 согласно показанному примеру содержит чашку 302 сиденья (например, раму сиденья пассажира, подвижное сиденье и т.д.), верхнюю несущую конструкцию 304 для пассажира, нижнюю несущую конструкцию 306 для пассажира и ремни 307 безопасности, которые соединены с чашкой 302. В данном примере чашка 302 сиденья функционально соединена с установочной рамой 308, которая содержит установочные направляющие 310 и напольный крепеж или фиксатор 312.
[0032] Сиденье 300 согласно показанному примеру используют для закрепления пассажира транспортного средства (например, воздушного летательного аппарата, наземного транспортного средства, подводного транспортного средства и т.д.). Верхняя несущая конструкция 304 для пассажира и нижняя несущая конструкция 306 для пассажира согласно показанному примеру удерживают вес пассажира и/или закрепляют его. Как будет более подробно описано ниже согласно ФИГ. 3В, чашка 302 совершает перемещение относительно установочной рамы 308 для поглощения энергии (например, энергии удара) и/или для обеспечения возможности регулировки высоты сиденья, занятого пассажиром.
[0033] На ФИГ. 3В показан вид сбоку примера сиденья 300, показанного на ФИГ. 3А. В примере, показанном на ФИГ. 3В, установочные направляющие 310 содержат установочные отверстия 316, а чашка 302 совершает перемещение вдоль установочных направляющих 310 (например, совершает скользящее перемещение вдоль установочных направляющих, совершает скользящее перемещение в направлении установочных направляющих) в направлениях (например, в целом в вертикальных направлениях), указанных двойной стрелкой 318 и/или ее направляют вдоль установочных направляющих в указанных направлениях. В данном примере хомуты 319 взаимодействуют и совершают скользящее перемещение по цилиндрическим поверхностям стационарных установочных направляющих 310, а чашка 302 сиденья и хомуты 319, например, смещаются относительно установочных направляющих 310. Смещение чашки 302 относительно пола обычно называется ходом и показано двойной стрелкой 320. В частности, ход задает величину смещения, возможную для чашки 302, а энергию (например, кинетическую энергию, связанную с ударом) сиденья 300 уменьшают и/или ограничивают посредством механизма/аппаратных средств для поглощения энергии, которые воздействуют на перемещение чашки 320 в пределах по меньшей мере части хода сиденья 300. Доступный ход сиденья также по меньшей мере частично ограничен требованиями к росту пассажира, занявшего сиденье (например, на основании данных о росте от колен пассажира, занявшего сиденье, до его ступней и необходимого положения глаз).
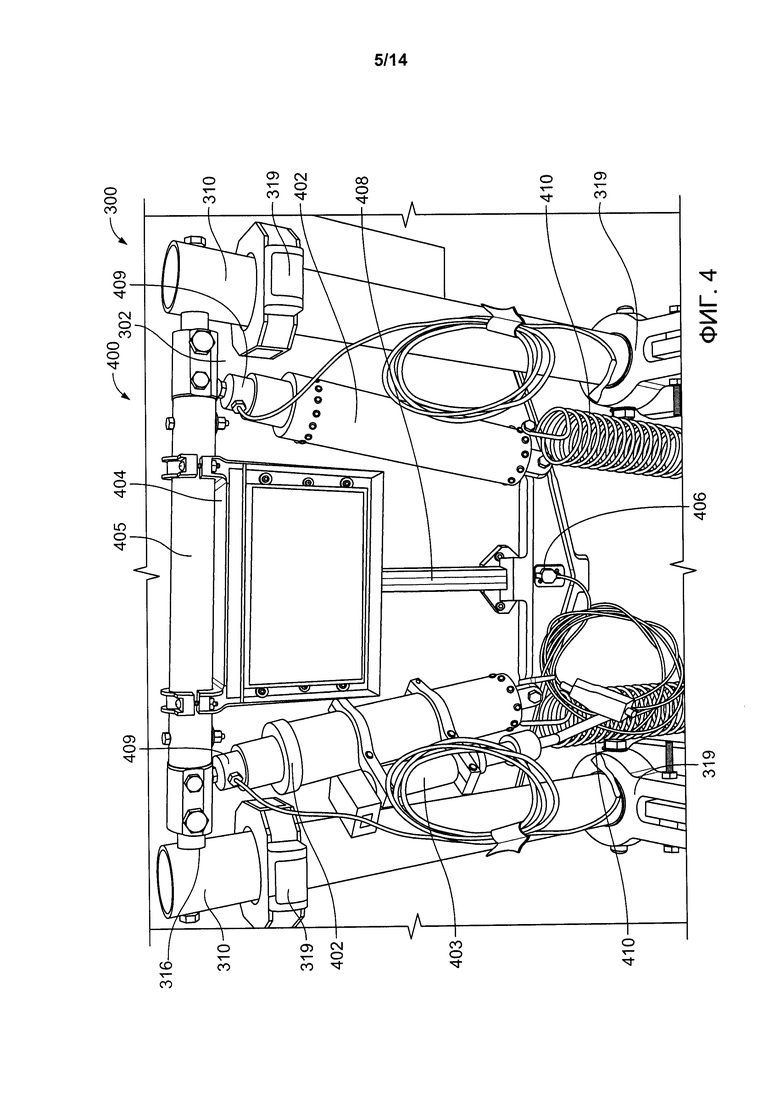
[0034] На ФИГ. 4 показан пример регулирующей системы 400 для регулировки ударной нагрузки, которая может быть реализована в примере сиденья 300, показанного на ФИГ. 3А и 3В. На виде, показанном на ФИГ. 4, регулирующая система 400 для регулировки ударной нагрузки показана собранной в виде части примера сиденья 300. Пример регулирующей системы 400 для регулировки ударной нагрузки содержит энергопоглощающие элементы 402, приводы/двигательные блоки 403 (один из них удален на данном виде в целях ясности), контроллер 404 серводвигателя, которое прикреплено к траверсе 405, которая скреплена с установочными отверстиями 316, описанными выше согласно ФИГ. 3В. Пример регулирующей системы 400 для регулировки ударной нагрузки также содержит оптический датчик положения (например, оптический датчик, датчик положения и т.д.) 406, оптическую полоску 408 для определения положения, тензодатчики 409 и вспомогательные пружины 410 для регулировки сиденья, которые используют для регулировки чашки 302 (например, для облегчения перемещения чашки 302 членами экипажа) по вертикали. Энергопоглощающие элементы 402 соединены на первом конце с траверсой 405 и функционально соединены на втором конце с чашкой 302 (например, заменены чашкой 302 на втором конце). В данном примере энергопоглощающие элементы 402 представляют собой энергопоглощающие элементы, выполненные в виде инверсионной трубки. Однако энергопоглощающие элементы 402 могут представлять собой энергопоглощающее устройство, имеющее любой подходящий тип, в том числе, но без ограничения, нелинейные пружины, демпферы, электромагнитные устройства и т.д.
[0035] Контроллер 404 серводвигателя согласно показанному примеру соединен с возможностью связи с блоками 403 двигателя (например, поворотными серводвигателями), которые используют для регулирования энергопоглощающих элементов 402, что обеспечивает изменение нагрузки (например, ударной нагрузки), передаваемой на пассажира, занявшего сиденье 300. В дополнительном или альтернативном варианте энергопоглощающие элементы 402 могут быть отрегулированы для изменения демпфирующего эффекта на пассажира, занявшего сиденье, в ответ на усилия и/или ускорения. В данном примере тензодатчики 409, которые соединены с энергопоглощающими элементами 402 и соединены с возможностью связи с контроллером 404 серводвигателя, выдают данные о весе и/или весе, приложенном пассажиром, занявшим сиденье, на контроллер 404 серводвигателя, что в свою очередь вызывает то, что блоки 403 двигателя изменяют ударную нагрузку энергопоглощающих элементов 402 на основании данных о весе и/или весе, приложенном пассажиром, занявшим сиденье.
[0036] В данном примере оптический датчик 406 положения также соединен с возможностью связи с контроллером 404 серводвигателя. В данном примере оптический датчик 406 положения выдает величину хода и/или имеющегося хода на контроллер 404 серводвигателя. Работа оптического датчика 406 описана более подробно ниже согласно ФИГ. 8.
[0037] В данном примере контроллер 404 серводвигателя вызывает то, что каждый из блоков 403 двигателя поворачивает и/или смещает кабель 700, который показан ниже согласно ФИГ. 7, для приведения в действие механизмов управления нагрузкой в энергопоглощающих элементах 402, что изменяет ударные нагрузки на соответствующие энергопоглощающие элементы 402. В частности, поворот кабеля 700 вызывает смещение роликового механизма энергопоглощающего элемента 402 по отношению к контурной или криволинейной поверхности, что обеспечивает изменение ударной нагрузки на энергопоглощающий элемент 402. В данном примере каждый блок двигателя из блоков 403 двигателя управляет соответствующим энергопоглощающим элементом 402 на противоположной стороне (например, левый двигательный блок управляет правым энергопоглощающим элементом на виде, показанном на ФИГ. 4).
[0038] В некоторых примерах контроллер 404 серводвигателя соединен с возможностью связи с системами управления транспортным средством (например, системами кабины, оборудованием для обеспечения полета, датчиками и т.д.) воздушного летательного аппарата. В таких примерах системы управления транспортным средством могут выдать данные о планируемом/ожидаемом ударе/крушении (например, условия удара, прогнозируемые условия удара и т.д.) на контроллер 404 серводвигателя. В свою очередь пример контроллера 404 двигателя может регулировать ударную нагрузку на энергопоглощающие элементы 402 по меньшей мере частично на основании этой информации. Данные, выданные системами управления транспортным средством, могут содержать, но без ограничения, рельеф местности, скорость воздушного летательного аппарата, ускорение воздушного летательного аппарата, высоту воздушного летательного аппарата, вес воздушного летательного аппарата (например, учитывают сжигание топлива и т.д.) и/или характеристики прогнозируемого удара и т.д. Примеры результатов сопоставления данных, используемых для учета при ударах (например, приближающихся ударах, прогнозируемых ударах), описаны ниже в соответствии с ФИГ. 13 и 14.
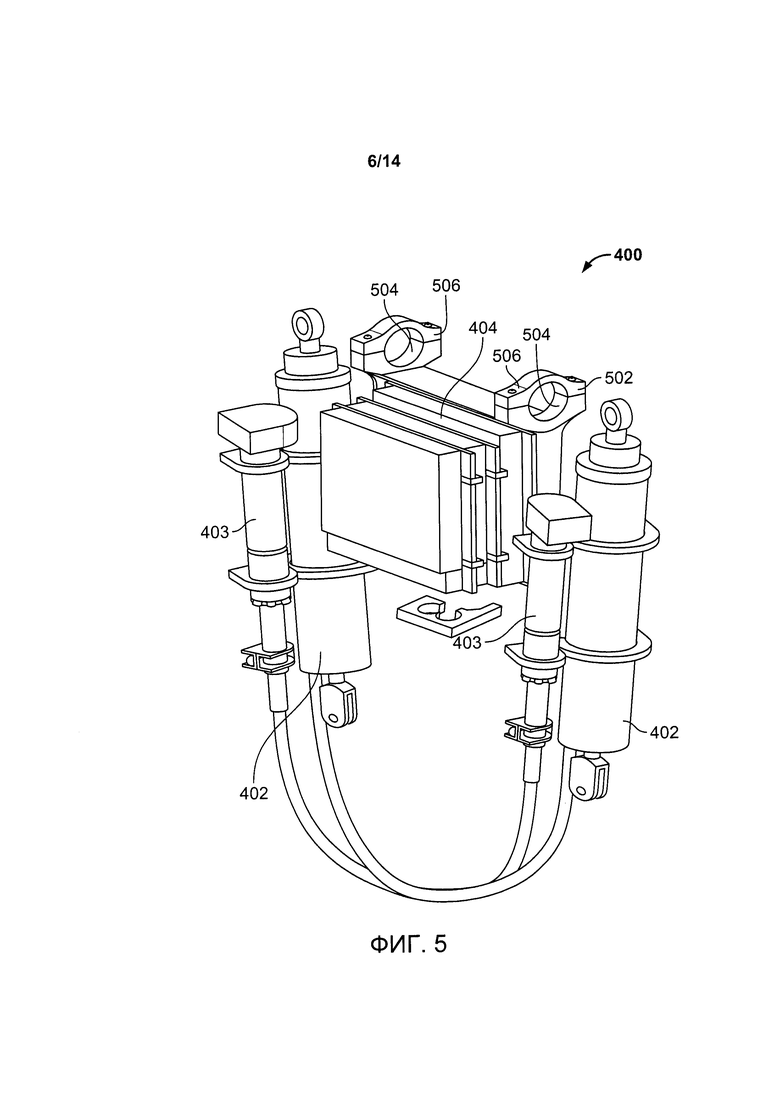
[0039] На ФИГ. 5 показан еще один вид примера регулирующей системы 400 для регулировки ударной нагрузки, показанной на ФИГ. 4. На виде, показанном на ФИГ. 5, энергопоглощающие элементы 402, блоки 403 двигателя и контроллер 404 серводвигателя показаны как удаленные из сиденья 300. В данном примере контроллер 404 серводвигателя соединен и/или собран с установочным держателем 502, который имеет отверстия 504 для приема траверсы 405 для соединения зажима 502 вместе с контроллером 404 серводвигателя с траверсой 405. Как описано выше согласно ФИГ. 4, траверса 405 остается скрепленной с установочными направляющими 310. В данном примере установочный держатель 502 содержит удаляемые крышки или зажимы 506 для облегчения сборки установочного держателя 502 вместе с контроллером 404 серводвигателя с траверсой 405.
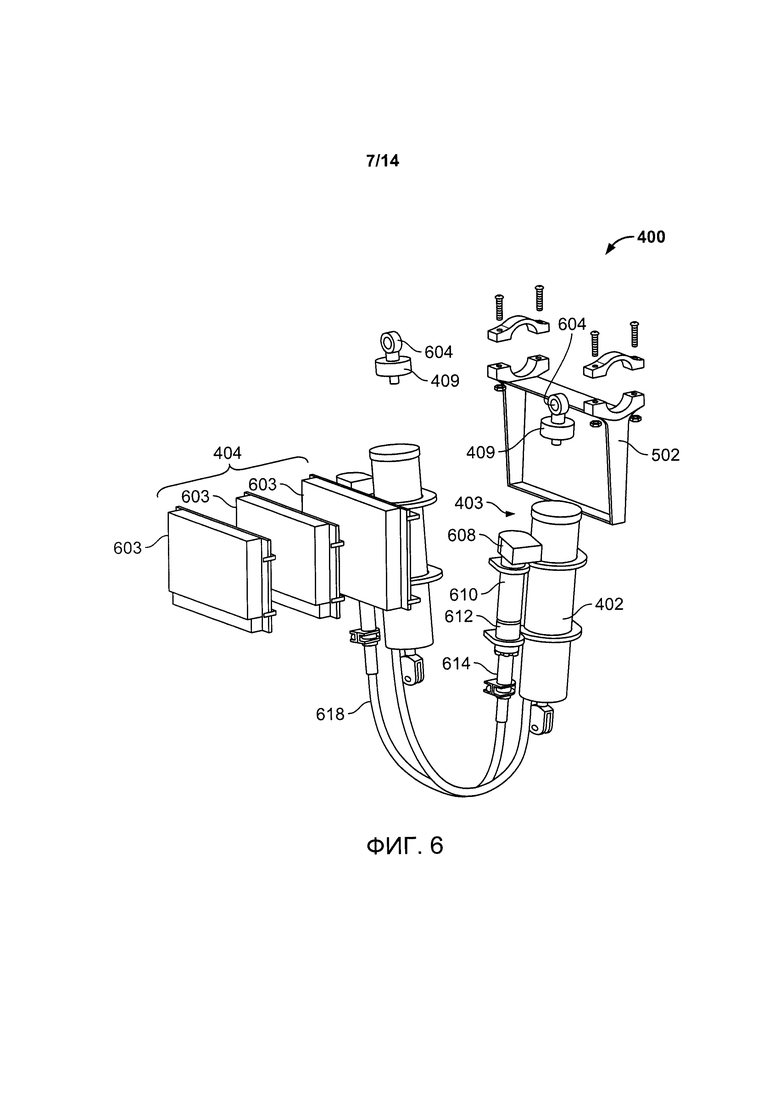
[0040] На ФИГ. 6 показан разобранный общий вид примера регулирующей системы 400 для регулировки ударной нагрузки, показанной на ФИГ. 4-5. В примере, показанном на ФИГ. 6, контроллер 404 серводвигателя удален из установочного держателя 502 и разделен на отдельные монтажные платы 603. В данном примере проушины (например, держатели) 604 и тензодатчики 409 отделены от соответствующих энергопоглощающих элементов 402. Проушины 604 согласно показанному примеру следует скреплять с траверсой 405.
[0041] В данном примере один из двигательных блоков 403 содержит преобразующее устройство 608, двигатель 610, редуктор или передачу 612 и соединитель 614. Как описано выше согласно ФИГ. 4, двигательный блок 403 управляет ударной нагрузкой (например, приложенной нагрузкой) на соответствующий энергопоглощающий элемент 402 (например, соответствующий энергопоглощающий элемент 402 на противоположной стороне) посредством кабельных блоков 618 и/или изменяет указанную ударную нагрузку. В данном примере происходит поворот кабелей 700 (показаны на ФИГ. 7) кабельных блоков 618, что обеспечивает приведение в действие/изменение механизмов управления нагрузкой в энергопоглощающих элементах 402 для изменения/регулировки приложенной ударной нагрузки на соответствующие энергопоглощающие элементы 402, соединенные с каждым из соответствующих кабелей 700.
[0042] Пример передачи 612 преобразовывает поворотное перемещение от двигателя 610 в поворотное перемещение одного из кабелей 700. Это поворотное перемещение кабеля 700 вызывает смещение в соответствующем энергопоглощающем элементе 402, что приводит в действие механизмы управления нагрузкой в соответствующем энергопоглощающем элементе 402, что обеспечивает изменение соотношения усилие/смещение чашки 302 относительно стационарных частей примера сиденья 300 (например, траверсы 405 и установочных направляющих 310). Преобразующее устройство 608 согласно показанному примеру измеряет повороты и/или поворотное смещение двигателя 610 и выдает информацию о повороте двигателя 610 на контроллер 404 серводвигателя таким образом, что контроллер 404 серводвигателя может определить текущую ударную нагрузку на соответствующий энергопоглощающий элемент 402.
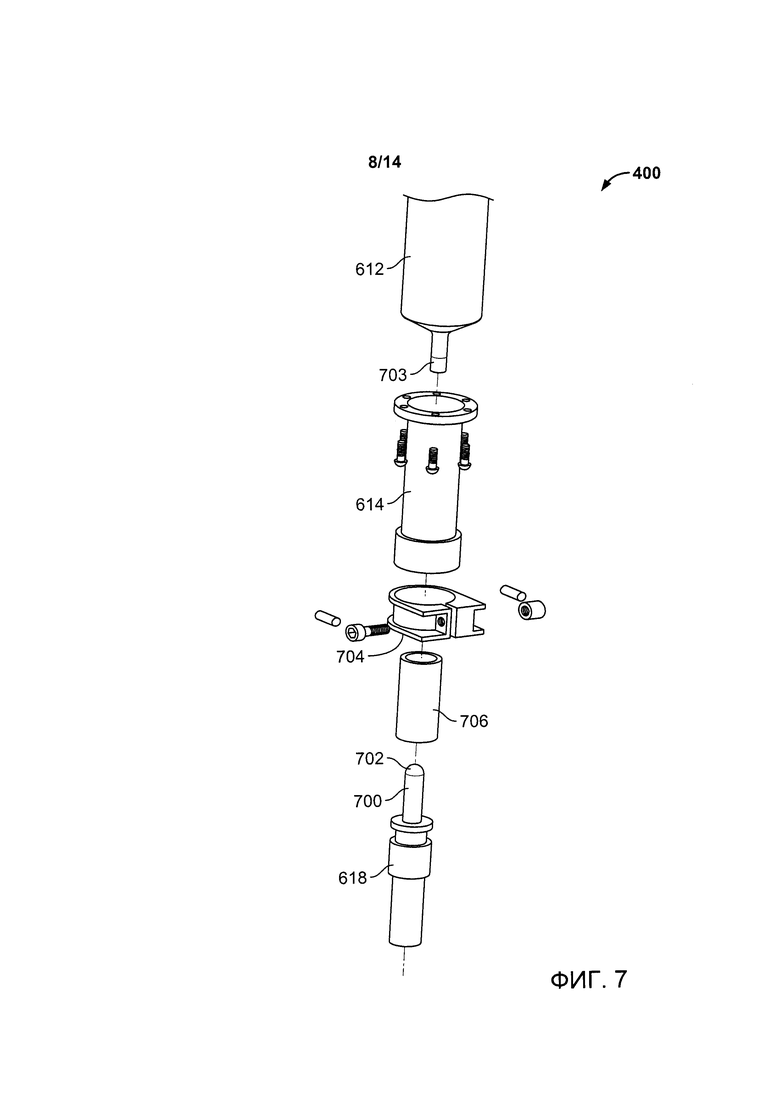
[0043] На ФИГ. 7 показан разобранный общий вид части примера регулирующей системы 400 для регулировки ударной нагрузки, показанной на ФИГ. 4-6. На виде, показанном на ФИГ. 7, корпус 614 и кабельный блок 618 отделен от передачи 612 и/или разобраны с ней, что обеспечивает открытие первого места 702 крепления, которое находится на конце вышеописанного поворотного кабеля (например, поворотного приводного кабеля) 700, и места 703 крепления передачи 612 в корпусе 614. В данном примере место 702 крепления и место 703 крепления должны быть соединены вместе. Соединитель 704 согласно показанному примеру соединяет корпус 614 с трубкой 706, которая может служить в качестве выравнивающего устройства для передающего/приводного кабеля 700.
[0044] Во время работы поворотное перемещение двигателя 610 передается через передачу 612, что вызывает поворот кабеля 700 вместе с местами 702 и 703 крепления. Поворот кабеля 700 вызывает смещение в соответствующем энергопоглощающем элементе 402, что вызывает то, механизм управления нагрузкой в энергопоглощающем элементе 402 регулирует ударную нагрузку на соответствующий энергопоглощающий элемент 402.
[0045] Несмотря на то, что поворотный приводной кабель 700 описан в примерах, раскрытых в настоящем документе, могут быть использованы любые подходящие приводная система, электромагнитная приводная система и/или регулирующая система для регулировки демпфирования, такие как, но без ограничения, система для привода линейного смещения, регулируемая демпфирующая система на основе текучей среды, регулируемая пружина, активная система подвеса, регулируемая магнитно-резонансная система или любая другая подходящая система диссипации энергии (например, механической энергии, кинетической энергии и т.д.).
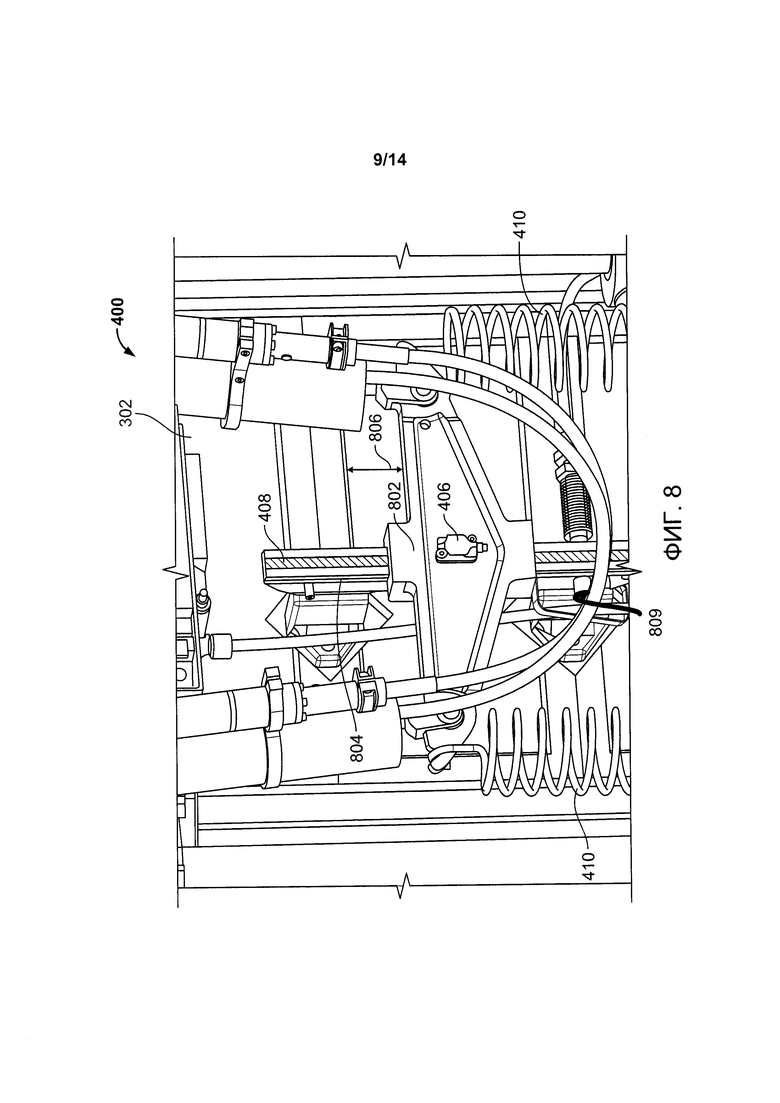
[0046] На ФИГ. 8 показан еще один вид примера регулирующей системы 400 для регулировки ударной нагрузки, показанной на ФИГ. 4-7. В примере, показанного на ФИГ. 8, опорный держатель 802, который совершает перемещение вдоль чашки 302, соединен с возможностью разъединения (например, соединение, которое задает линейное смещение) с оптической рейкой 804. Во время вертикальной регулировки чашки 302 сиденья, занятого пассажиром, для размещения различных антропометрических данных пассажира выводят из взаимодействия штырь 809, который соединен и/или взаимодействует с оптической рейкой 804 с опорным держателем 802,. В результате оптическая рейка 804 совершает перемещение в вертикальном направлении вместе с чашкой 302 сиденья относительно опорного держателя 802. Пример опорного держателя 802 имеет скрепленный/соединенный с ним датчик 406 положения. Аналогичным образом, оптическая полоса 408 для определения положения соединена с оптической рейкой 804. В данном примере вспомогательные пружины 410 для регулировки сиденья соединены с опорным держателем 802.
[0047] Во время работы вертикальная регулировка (вертикальное перемещение на виде, показанном на ФИГ. 8) чашки 302 сиденья, показанная двойной стрелкой 806, вызывает перемещение опорного держателя 802 и датчика 406 положения относительно оптической рейки 804 и оптической полосы 408 для определения положения. По мере смещения опорного держателя 802 датчик 406 положения согласно показанному примеру измеряет относительное положение оптической полосы 408 для определения положения, что обеспечивает определение доступного хода чашки 302 (например, после регулировки пассажиром). В частности, оптический датчик 406 положения согласно показанному примеру определяет относительное смещение оптического датчика 406 положения от оптической полосы 408 для определения положения путем идентификации и/или подсчета делений (например, отметок) оптической полосы 408 для определения положения, посредством преобразующего устройства (например, оптического преобразующего устройства) оптического датчика 406 положения по мере перемещения чашки 302 вверх и вниз относительно оптической полосы 408 для определения положения. В данном примере контроллер 404 серводвигателя использует определенный/измеренный удар для расчета удара и/или доступного хода чашки 302. В некоторых примерах оптический датчик 406 положения используют для определения веса пассажира, занявшего сиденье. Ход и/или доступный ход чашки 302 могут быть также использованы для расчета и/или повторной регулировки вышеописанной ударной нагрузки. Несмотря на то, что в примере, показанном на ФИГ. 8, показана линейная оптическая измерительная система, может быть использована любая другая подходящая система обнаружения положения.
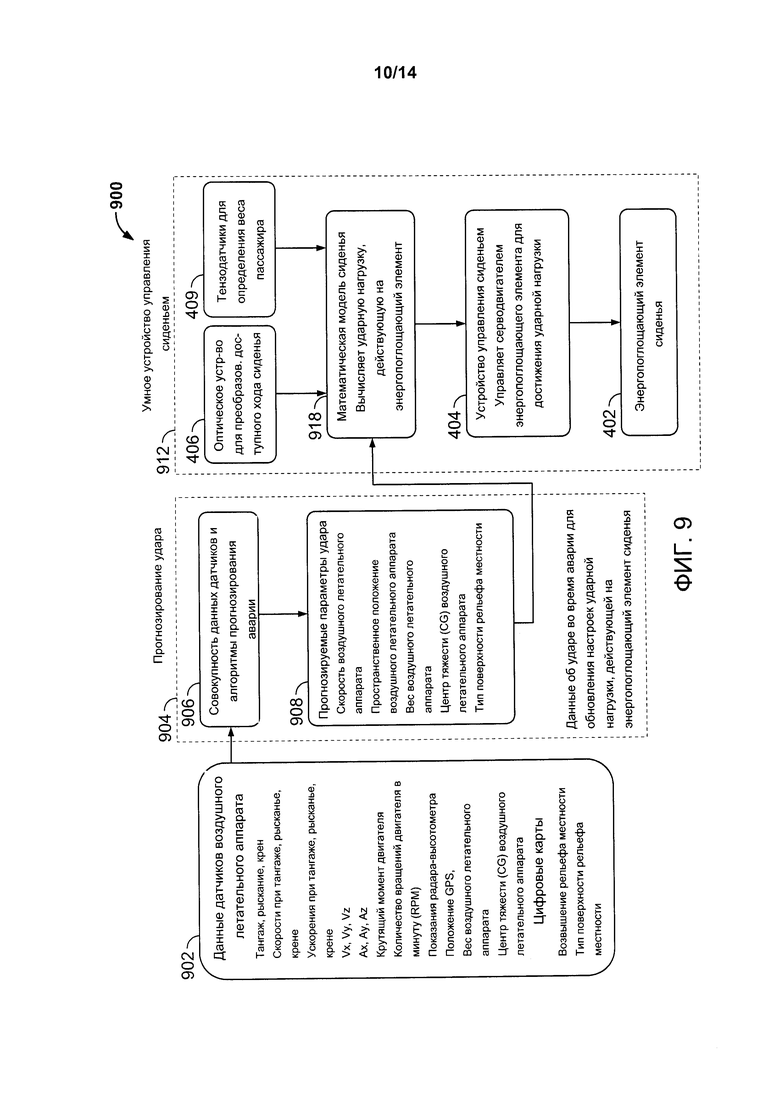
[0048] На ФИГ. 9 схематически показан вид примера архитектуры 900 согласно одному из примеров реализации регулирующей системы 400 для регулировки ударной нагрузки, показанной на ФИГ. 4-7. Пример алгоритма 900 содержит входные данные 902, которые могут быть выданы датчиком/системами датчиков и/или системами управления полетом, устройством 904 для прогнозирования удара, которое содержит совокупность данных датчиков и алгоритмы 906 прогнозирования аварии и прогнозируемые параметры удара (например, прогнозируемые условия удара) 908, а также умным устройством 912 управления сиденьем. Умное устройство 912 управления сиденьем согласно показанному примеру содержит датчик 406 положения, тензодатчик 409 для определения веса пассажира, математическую модель 918 сиденья, контроллер 404 серводвигателя и энергопоглощающий элемент 402 сиденья.
[0049] Во время работы входные данные 902 согласно показанному примеру выдают на устройство 904 для прогнозирования удара (например, совокупность данных датчиков и алгоритмы 906 прогнозирования аварии устройства 904 для прогнозирования удара). Входные данные 902 могут содержать, но без ограничения, тангаж (положение, скорости, ускорение), рысканье (положение, скорости, ускорение), крен (положение, скорости, ускорение), скорость, векторные компоненты скорости, ускорение, векторные компоненты ускорения, крутящий момент, количество вращений двигателя в минуту (RPM), данные радара-высотометра, положение согласно глобальной системе навигации и определения местоположения (GPS), вес воздушного летательного аппарата и/или центр тяжести воздушного летательного аппарата и т.д. В дополнительном или альтернативном варианте в некоторых примерах входные данные 902 также содержат данные цифровой карты, которые содержат значение превышения рельефа местности (например, превышения, соотнесенного с текущей высотой, и т.д.) и/или тип/топографию поверхности рельефа местности.
[0050] Пример устройства 904 для прогнозирования удара прогнозирует параметры 908 удара на основании входных данных 902. Прогнозируемые параметры 908 удара могут содержать скорость воздушного летательного аппарата (например, скорость воздушного летательного аппарата при ударе), пространственное положение воздушного летательного аппарата (например, пространственное положение воздушного летательного аппарата при ударе), общий вес воздушного летательного аппарата (например, вес воздушного летательного аппарата после сжигания топлива и т.д.), центр тяжести воздушного летательного аппарата и данные о типе/топографии поверхности рельефа местности. В данном примере устройство 904 для прогнозирования удара рассчитывает прогнозируемые параметры удара на основании входных данных 902. В дополнительном или альтернативном варианте устройство 904 для прогнозирования удара рассчитывает и/или повторно рассчитывает ударную нагрузку на энергопоглощающий элемент 402 на основании прогнозируемых параметров 908 удара, которые необходимо выдать на умное устройство 912 управления сиденьем.
[0051] В данном примере "умное" устройство 912 управления сиденьем принимает прогнозируемые параметры удара от устройства 904 для прогнозирования удара. В частности, математическая модель 918 сиденья принимает прогнозируемые параметры 908 удара и информацию о доступном ходе (например, смещение чашки сиденья на основании антропометрических данных) от оптического преобразующего устройства 406 и данные о весе пассажира, основанные на данных тензодатчика 409. В результате математическая модель 918 сиденья затем рассчитывает ударную нагрузку, которую выдают на контроллер 404 серводвигателя, который, в свою очередь, управляет энергопоглощающим элементом 402 сиденья на рассчитанную ударную нагрузку. Примеры расчетов/математических моделей описаны ниже в соответствии с ФИГ. 13 и 14.
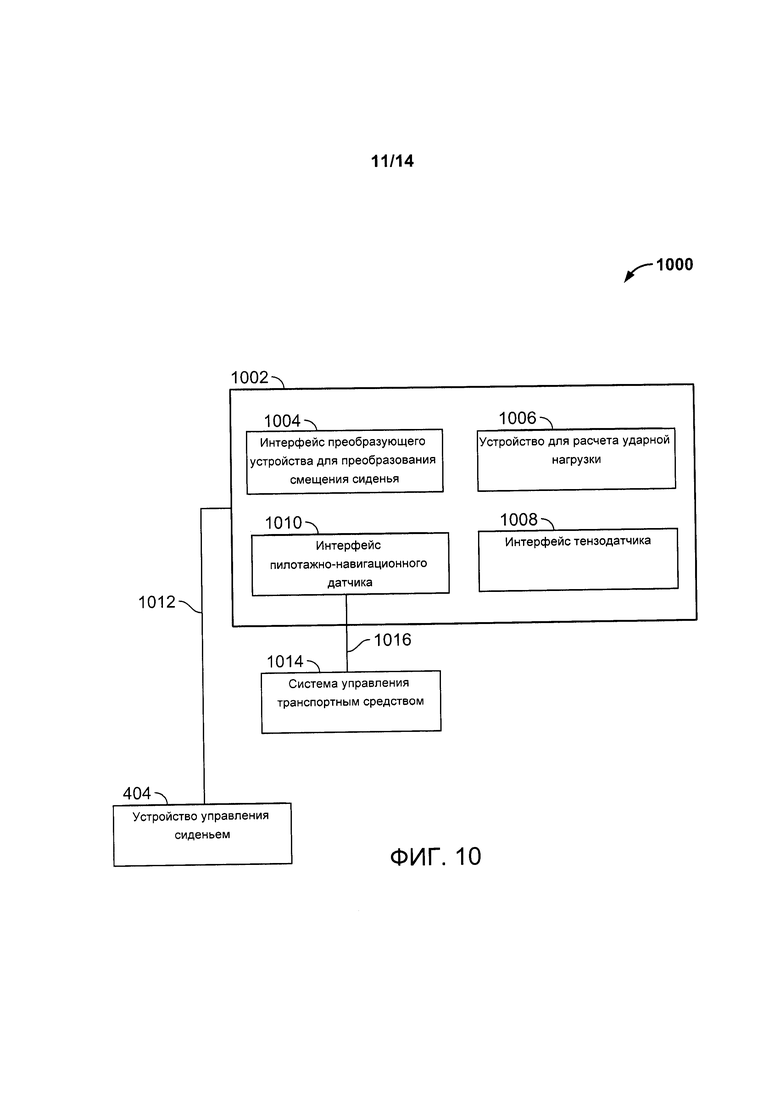
[0052] На ФИГ. 10 показан пример системы 1000 управления сиденьем, которая может быть использована для реализации примера архитектуры 900, показанной на ФИГ. 9. Система 1000 управления примером сиденья содержит расчетный модуль 1002, который содержит интерфейс 1004 преобразующего устройства для преобразования смещения сиденья, устройство 1006 для расчета ударной нагрузки, интерфейс 1008 тензодатчика и интерфейс 1010 пилотажно-навигационного датчика (например, интерфейс системы управления полетом и т.д.). Расчетный модуль 1002 согласно показанному примеру соединен с возможностью связи с контроллером 404 серводвигателя посредством линии 1012 связи. Аналогичным образом, в данном примере интерфейс 1010 пилотажно-навигационного датчика соединен с системой 1014 (например, измерительными системами связи, оборудованием для обеспечения полета и т.д.) управления транспортным средством посредством линии 1016 связи.
[0053] В данном примере интерфейс 1008 тензодатчика принимает/определяет вес пассажира, например, посредством тензодатчика, такого как тензодатчик 409. В результате пример устройства 1006 для расчета ударной нагрузки рассчитывает ударную нагрузку энергопоглощающего элемента, такого как энергопоглощающий элемент 402, например, на основании веса пассажира. В некоторых примерах расчет ударной нагрузки дополнительно основан на местоположении сиденья (например, относительном положении сиденья), ходе и/или доступном ходе, выдаваемых интерфейсом 1004 преобразующего устройства для преобразования сиденья. В дополнительном или альтернативном варианте ударную нагрузку рассчитывают на основании прогнозируемых условий удара, таких как прогнозируемые условия, описанные выше согласно ФИГ. 9.
[0054] В некоторых других примерах контроллер 404 серводвигателя рассчитывает ударную нагрузку вместо расчетного модуля 1002 на основании одного или более из веса пассажира от интерфейса 1008 тензодатчика, доступного хода сиденья от интерфейса 1004 преобразующего устройства для преобразования сиденья и/или данных о полете (например, данных о прогнозируемом ударе, параметрах полета и т.д.), принятых посредством интерфейса 1010 пилотажно-навигационного датчика.
[0055] Несмотря на то, что на ФИГ. 10 показан пример реализации системы 1000 управления примером сиденья, один или более из элементов, процессов и/или устройств, показанных на ФИГ. 10, могут быть объединены, разделены, повторно размещены, опущены, исключены и/или реализованы любым другим способом. Кроме того, пример расчетного модуля 1002, пример интерфейса 1004 преобразующего устройства для преобразования сиденья, пример устройства 1006 для расчета ударной нагрузки, пример интерфейса 1008 тензодатчика, пример интерфейса 1010 пилотажно-навигационного датчика, пример контроллера 404 серводвигателя, пример системы 1014 управления транспортным средством и/или, в частности, система 1000 управления примером сиденья, показанная на ФИГ. 10, могут быть реализованы аппаратными средствами, программными средствами, программно-аппаратными средствами и/или любой комбинацией из аппаратных средств, программных средств и/или программно-аппаратных средств. Таким образом, например, любой из примера расчетного модуля 1002, пример интерфейса 1004 преобразующего устройства для преобразования сиденья, примера устройства 1006 для расчета ударной нагрузки, примера интерфейса 1008 тензодатчика, примера интерфейса 1010 пилотажно-навигационного датчика, примера контроллера 404 серводвигателя, примера системы 1014 управления транспортным средством и/или, в частности, системы 1000 управления примером сиденья могут быть реализованы посредством одной или более аналоговых или цифровых схем, логических схем, программируемого процессора или программируемых процессоров, специализированной интегральной схемы или специализированных интегральных схем (ASIC), программируемого логического устройства или программируемых логических устройств (PLD) и/или программируемого пользователем логического устройства или программируемых пользователем логических устройств (FPLD). При прочтении любых пунктов формулы изобретения, относящихся к устройству или системе согласно данному патенту, они охватывают чисто программную реализацию и/или аппаратно-программную реализацию, по меньшей мере один из примера расчетного модуля 1002, примера интерфейса 1004 преобразующего устройства для преобразования сиденья, примера устройства 1006 для расчета ударной нагрузки, пример интерфейса 1008 тензодатчика, примера интерфейса 1010 пилотажно-навигационного датчика, примера контроллера 404 серводвигателя и/или примера системы 1014 управления транспортным средством настоящим определены таким образом, что они содержат физическое считываемое компьютером запоминающее устройство или дисковое запоминающее устройство, такое как память, универсальный цифровой диск (DVD), компакт-диск (CD), Blu-ray диск и т.д., хранящие программное обеспечения и/или программно-аппаратное обеспечение. Кроме того, система 1000 управления примером сиденья, показанная на ФИГ. 10, может содержать один или более элементов, процессов и/или устройств в дополнение к тем, которые показаны на ФИГ. 11, или вместо них и/или может содержать более одного из любых или всех из показанных элементов, процессов и устройств.
[0056] На ФИГ. 11 показана блок-схема, иллюстрирующая пример способа реализации системы 1000 управления сиденьем, показанной на ФИГ. 10. В данном примере способ может быть реализован с использованием машиночитаемых инструкций, которые содержат программу для исполнения процессором, таким как процессор 1212, показанный в примере процессорной платформы 1200, описанной ниже согласно ФИГ. 12. Программа может быть встроена в программное обеспечение, хранящееся на физическом считываемом компьютером носителе, таком как CD-ROM, гибкий диск, накопитель на жестких дисках, универсальный цифровой диск (DVD), Blu-ray диск или память, связанная с процессором 1212, однако в альтернативном варианте вся программа и/или ее части могут быть исполнены устройством, отличном от процессора 1212, и/или встроены в программно-аппаратные средства или специализированные аппаратные средства. Кроме того, несмотря на то, что пример программы описан со ссылкой на блок-схему, показанную на ФИГ. 11, в альтернативном варианте могут быть использованы многие другие способы реализации системы 1000 управления примером сиденья. Например, может быть изменен порядок исполнения блоков и/или могут быть изменены, исключены или объединены некоторые из описанных блоков.
[0057] Как описано выше, пример способа, показанного на ФИГ. 11, может быть реализован с использованием закодированных инструкций (например, считываемых компьютером и/или машиночитаемых инструкций), хранящихся на физическом считываемом компьютером носителе, таком как накопитель на жестких дисках, флэш-память, постоянное запоминающее устройство (ROM), компакт-диск (CD), универсальный цифровой диск (DVD), кэш-память, оперативное запоминающее устройство (RAM) и/или любое другое запоминающее устройство или дисковое запоминающее устройство, в котором информации хранится в течение периода времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение краткосрочных периодов времени, в течение временной буферизации и/или при кэшировании информации). При использовании в настоящем документе термин «материальный (tangible) считываемый компьютером носитель» специально задан таким образом, что он содержит машиночитаемое запоминающее устройство любого типа и/или дисковое запоминающее устройство и исключает распространяющиеся сигналы и исключает передающие среды. При использовании в настоящем документе, термины «материальный считываемый компьютером носитель» и «материальный машиночитаемый носитель» используют взаимозаменяемым образом. В дополнительном или альтернативном варианте пример способа, показанный на ФИГ. 11, может быть реализован с использованием закодированных инструкций (например, считываемых компьютером и/или машиночитаемых инструкций), хранящихся на компьютере для длительного хранения данных и/или машиночитаемом носителе, таком как накопитель на жестких дисках, флэш-память, постоянное запоминающее устройство, компакт-диск, универсальный цифровой диск, кэш-память, оперативное запоминающее устройство и/или любое другое запоминающее устройство или дисковое запоминающее устройство, в котором информации хранится в течение периода времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратковременных моментов времени, в течение временной буферизации и/или для кэширования информации). При использовании в настоящем документе, термин считываемый компьютером носитель для длительного хранения данных специально задан таким образом, что он включает машиночитаемое запоминающее устройство любого типа и/или дисковое запоминающее устройство и исключает распространяющиеся сигналы, и исключает среду передачи данных. При использовании в настоящем документе, когда фразу «по меньшей мере» используют в качестве переходного термина во вводной части пункта формулы изобретения, она не допускает ограничения, так же как и термин «содержащий» не допускает ограничения.
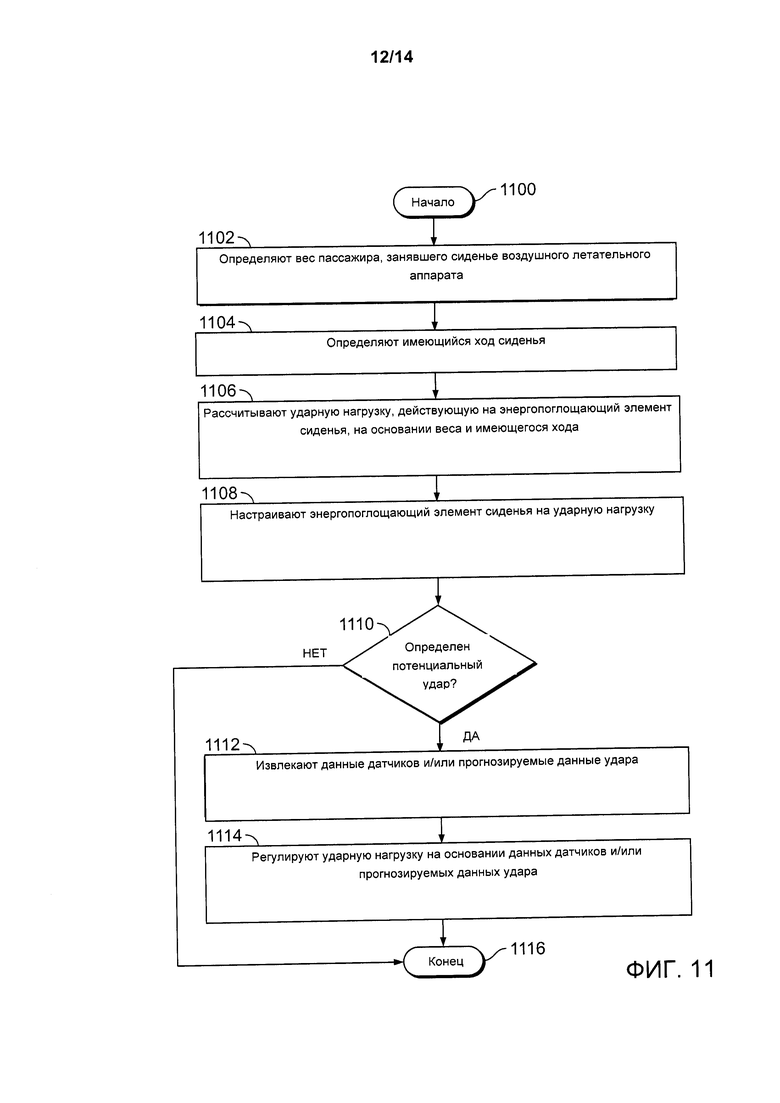
[0058] Пример способа, показанный на ФИГ. 11, начинается в блоке 1100, в котором воздушный летательный аппарат находится на земле перед взлетом (блок 1100). В блоке 1102 определяют вес пассажира, занявшего сиденье (например, сиденье 300) воздушного летательного аппарата. Например, тензодатчик, такой как тензодатчик 409, определяет вес перед нахождением воздушного летательного аппарата на земле. В некоторых примерах вес, измеренный тензодатчиком, не представляет собой весь вес пассажира, а только его часть, которая передается через сиденье (например, эффективный вес).
[0059] В некоторых примерах затем определяют доступный ход сиденья (блок 1104). Например, доступный ход сиденья определяют на основании данных датчика положения (например, преобразующего устройства), такого как оптический датчик 406 положения. В некоторых примерах рост пассажира может быть определен на основании относительного положения чашки (например, чашки 302) по отношению к сиденью. В некоторых примерах данное положение измеряют тензодатчиком во время нахождения воздушного летательного аппарата на земле. В дополнительном или альтернативном варианте положение хода измеряют после изменения/регулировки положения пассажира (например, во время регулировки пассажиром сиденья).
[0060] Ударную нагрузку сиденья рассчитывают на основании веса пассажира, определенного на основании данных тензодатчика (блок 1106). В частности, ударную нагрузку рассчитывают на основании эффективного веса пассажира для обеспечения надлежащего уровня поглощения энергии во время потенциального удара. В некоторых примерах ударную нагрузку рассчитывают по меньшей мере частично на основании доступного хода сиденья и/или предполагаемых условий удара во время аварии. В дополнительном или альтернативном варианте ударную нагрузку рассчитывают на основании положения хода. Ниже в соответствии с ФИГ. 13 и 14 показаны некоторые примеры таблиц данных, используемых в этих расчетах.
[0061] В данном примере энергопоглощающий элемент сиденья (например, энергопоглощающий элемент 402) настраивают на рассчитанную ударную нагрузку (блок 1108). Например, контроллер серводвигателя (например, контроллер 404 серводвигателя) направляет двигательный блок (например, двигательный блок 403) для регулирования соответствующего энергопоглощающего элемента (например, энергопоглощающего элемента 402) с использованием рассчитанной ударной нагрузки. В некоторых примерах энергопоглощающий элемент сиденья настраивают на рассчитанную ударную нагрузку перед взлетом воздушного летательного аппарата.
[0062] Затем определяют, обнаружено ли потенциальное/предстоящее удар при аварии воздушного летательного аппарата (блок 1110). Например, оборудование для обеспечения полета/управляющие системы воздушного летательного аппарата, такие как пример системы 1014 управления транспортным средством, могут выдавать предупредительное сообщение/данные, относящиеся к контроллеру серводвигателя, такому как контроллер 404 серводвигателя, на основании данных о приближающемся ударе и/или параметров (например, рассчитанных параметров), относящихся к обнаруженному и/или прогнозируемому столкновению.
[0063] Если определено, что возникновение удара (например, предстоящего удара) не прогнозируется (блок 1110), то процесс завершается (блок 1116). Однако если определен факт обнаружения потенциального удара (блок 1110), то, например, данные датчиков и/или данные о прогнозируемом ударе извлекают из пилотажно-навигационного интерфейса (например, интерфейса 1010 датчиков) посредством устройства управления сиденьем, такого как контроллер 404 серводвигателя (блок 1112). Затем ударную нагрузку регулируют на основании данных датчиков и/или данных о прогнозируемом ударе (блок 1114) с последующим завершением процесса (блок 1116). В некоторых примерах данные о ударе рассчитывают и/или прогнозируют на основании текущих условий полета.
[0064] На ФИГ. 12 показана структурная схема примера процессорной платформы 1200, выполненной с возможностью исполнения инструкций для реализации примера способа, показанного на ФИГ. 11, для реализации системой 1000 управления сиденьем, показанной на ФИГ. 10. Процессорная платформа 1200 может представлять собой, например, сервер, персональный компьютер, мобильное устройство (например, мобильный телефон, смартфон, планшет, такой как планшет типа iPadTM), карманный персональный компьютер (PDA), персональный видеомагнитофон, телеприставку или вычислительное устройство любого другого типа.
[0065] Процессорная платформа 1200 согласно показанному примеру содержит процессор 1212. Процессор 1212 согласно показанному примеру представляет собой аппаратные средства. Например, процессор 1212 может быть реализован посредством одной или более интегральных схем, логических схем, микропроцессоров или управляющих устройств любой необходимой серии или производителя.
[0066] Процессор 1212 согласно показанному примеру содержит локальную память 1213 (например, кэш-память). Процессор 1212 также содержит расчетный модуль 1002, интерфейс 1004 преобразующего устройства для преобразования сиденья, устройство 1006 для расчета ударной нагрузки, интерфейс 1008 тензодатчика, интерфейс 1010 пилотажно-навигационного датчика и/или систему 1014 управления транспортным средством. Процессор 1212 согласно показанному примеру связан посредством шины 1218 с основной памятью, содержащей энергозависимую память 1214 и энергонезависимую память 1216. Энергозависимая память 1214 может быть реализована посредством синхронного динамического оперативного запоминающего устройства (SDRAM), динамического оперативного запоминающего устройства (DRAM), динамического оперативного запоминающего устройства компании «RAMBUS» (RDRAM) и/или оперативного запоминающего устройства любого другого типа. Энергонезависимая память 1216 может быть реализована посредством флэш-памяти и/или запоминающего устройства любого другого необходимого типа. Доступом к основной памяти 1214, 1216 управляет устройство управления памятью.
[0067] Процессорная платформа 1200 согласно показанному примеру также содержит схему 1220 интерфейса. Схема 1220 интерфейса может быть реализована посредством интерфейса любого стандарта, такого как интерфейс «Ethernet», универсальная последовательная шина (USB) и/или интерфейс шины PCI.
[0068] В показанном примере одно или более устройств 1222 ввода соединены со схемой 1220 интерфейса. Устройство или устройства 1222 ввода обеспечивают возможность ввода пользователем данных и команд в процессор 1212. Устройство или устройства ввода могут быть реализованы посредством, например, аудиодатчика, микрофона, фотоаппарата или видеокамеры, клавиатуры, кнопки, манипулятора типа «мышь», сенсорного экрана, сенсорного планшета, шарового манипулятора, средств типа «isopoint» и/или системы распознавания речи.
[0069] В показанном примере одно или более устройств 1224 вывода также соединены со схемой 1220 интерфейса. Устройства 1224 вывода могут быть реализованы, например, посредством дисплейных устройств (например, светодиода (LED), органического светодиода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), сенсорного экрана, устройства вывода тактильного типа, принтера и/или динамиков). Таким образом, схема 1220 интерфейса согласно показанному примеру обычно содержит карту с графическим драйвером, чип с графическим драйвером или процессор с графическим драйвером.
[0070] Схема 1220 интерфейса согласно показанному примеру также содержит устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевая интерфейсная карта для облегчения обмена данными с внешними машинами (например, вычислительными устройствами любого типа) посредством сети 1226 (например, сетевого соединения стандарта «Ethernet», цифровой абонентской линия связи (DSL), телефонной линии, коаксиального кабеля, телефонной системы сотовой связи и т.д.).
[0071] Процессорная платформа 1200 согласно показанному примеру также содержит одно или более запоминающих устройств 1228 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 1228 большой емкости содержат накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках, накопители на Blu-ray дисках, RAID-системы и накопители на универсальных цифровых дисках (DVD).
[0072] Закодированные инструкции 1232 для реализации способа, показанного на ФИГ. 11, могут быть сохранены в запоминающем устройстве 1228 большой емкости, энергозависимой памяти 1214, энергонезависимой памяти 1216 и/или на извлекаемом физическом считываемом компьютером носителе, таком как компакт-диск CD или универсальный цифровой диск (DVD).
[0073] На ФИГ. 13 показан график 1300, представляющий пример профиля данных, который может быть использован для определения ударной нагрузки на основании веса пассажира. В данном примере график 1300 представляет данные, относящиеся к вертикальному удару при аварии воздушного летательного аппарата при скорости, равной приблизительно 42 футов в секунду (12,8 м в секунду). График 1300 имеет вертикальную ось 1302, представляющую ударную нагрузку энергопоглощающего элемента (например, заданную ударную нагрузку) сиденья, и горизонтальную ось 1304, которая представляет эффективный вес (например, часть общего веса человека, приложенного к сиденью) пассажира, измеренный на сиденье.
[0074] Как можно увидеть на графике 1300, увеличение веса пассажира приводит к более высоким ударным нагрузкам. В некоторых примерах ударную нагрузку также изменяют на основании доступного хода, как можно увидеть на подписи 1306 к графику 1300. В данном примере имеется множество кривых ударной нагрузки на графике 1300 на основании изменяющихся значений доступного хода, которые могут представлять собой непрямую функцию от роста пассажира. Показанный пример графика 1300 иллюстрирует то, как антропометрические данные о пассажире могут быть использованы для регулировки ударной нагрузки для обеспечения большей эффективности энергопоглощающих элементов. Кроме того, в некоторых примерах использование эффективного веса вместо общего веса пассажира также может обеспечивать более эффективное распределение ударной нагрузки, воздействующей на пассажира.
[0075] Несмотря на то, что выше описан пример удара во время аварии при скорости, равной 42 фута в секунду (12,8 м в секунду), могут быть использованы профили данных, соответствующих многим другим условиям удара, не обязательно ограниченным скоростью удара, (например, пространственное положение воздушного летательного аппарата, рельеф местности и/или вектор или векторы удара и т.д.).
[0076] На ФИГ. 14 показан график 1400, представляющий пример профиля данных для регулировки ударной нагрузки на основании прогнозируемой скорости удара во время аварии. Пример графика 1400 имеет вертикальную ось 1402, которая представляет поправочный коэффициент (например, скалярный поправочный коэффициент), используемый для регулировки ударной нагрузки на основании скорости при прогнозируемом ударе, которая представлена на горизонтальной оси 1404. Поправочный коэффициент вертикальной оси 1402 обозначен символом а и представлен формулой 1405, которая представляет пример расчета поправочного коэффициента на основании примера базисной линии при скорости удара во время аварии, равной 42 фута в секунду (12,8 м в секунду). Данный пример профиля данных может быть использован вместе с профилем данных, описанным выше согласно ФИГ. 13 для определения/изменения ударной нагрузки. В некоторых примерах математическая модель 918 сиденья, показанная на ФИГ. 9, может использовать таблицы, использующие данные, представленные посредством примеров, показанных на ФИГ. 13 и 14, для расчета ударной нагрузки.
[0077] Согласно приведенному выше описанию, следует понимать, что вышеописанные способы и устройство обеспечивают более эффективное поглощение энергии/более эффективное управление нагрузкой сидений транспортного средства, особенно, например, в течение удара во время аварии. В частности, примеры, раскрытые в настоящем документе, уменьшают вероятность приложения слишком низких или избыточных ударных нагрузок к пассажиру, занявшему сиденье транспортного средства, путем определения характерных для пассажира антропометрических данных для адаптирования ударной нагрузки к требованиям заказчика на основании антропометрических данных отдельного пассажира для более эффективного управления энергией, которую необходимо поглотить сиденьем транспортного средства.
[0078] В одном из аспектов настоящего изобретения предложен способ, согласно которому: определяют вес пассажира, занявшего сиденье воздушного летательного аппарата, рассчитывают, с использованием процессора, ударную нагрузку на энергопоглощающий элемент сиденья, функционально соединенный с сиденьем, на основании веса пассажира, и настраивают энергопоглощающий элемент сиденья на рассчитанную ударную нагрузку.
[0079] Раскрыт способ, который дополнительно включает этап, согласно которому определяют доступный ход сиденья, причем расчет ударной нагрузки дополнительно основан на доступном ходе.
[0080] Кроме того, раскрыт способ, согласно которому доступный ход определяют на основании данных оптического датчика.
[0081] Кроме того, раскрыт способ, согласно которому ударная нагрузка дополнительно основана на условиях удара.
[0082] Кроме того, раскрыт способ, согласно которому энергопоглощающий элемент сиденья настраивают на рассчитанную ударную нагрузку перед взлетом воздушного летательного аппарата.
[0083] Раскрыт способ, который дополнительно содержит повторно расчет ударной нагрузки на основании условий удара при прогнозируемом ударе.
[0084] Кроме того, раскрыт способ, согласно которому повторный расчет ударной нагрузки дополнительно основан на одном или более из следующего: рельеф местности, скорость воздушного летательного аппарата, ускорение воздушного летательного аппарата, высота воздушного летательного аппарата, вес воздушного летательного аппарата, и рассчитанные характеристики удара.
[0085] Раскрыт способ, согласно которому вес определяют тензодатчиком при нахождении воздушного летательного аппарата на земле.
[0086] Еще в одном аспекте настоящего изобретения предложено устройство, содержащее: датчик веса на сиденье воздушного летательного аппарата, энергопоглощающий элемент сиденья, функционально соединенный с сиденьем, привод, функционально соединенный с энергопоглощающим элементом сиденья, и процессор, соединенный с возможностью связи с приводом и выполненный с возможностью расчета ударной нагрузки на энергопоглощающий элемент сиденья на основании данных о весе пассажира от датчика веса, причем привод предназначен для регулирования энергопоглощающего элемента сиденья на основании рассчитанной ударной нагрузки.
[0087] Раскрыто устройство, которое дополнительно содержит датчик положения для определения положения чашки сиденья относительно рамы сиденья, причем процессор рассчитывает ударную нагрузку дополнительно на основании относительного положения.
[0088] Кроме того, раскрыто устройство, в котором датчик положения содержит оптический датчик.
[0089] Кроме того, раскрыто устройство, в котором привод содержит вращательный двигатель.
[0090] Кроме того, раскрыто устройство, в котором ударная нагрузка повторно рассчитывают на основании данных, принятых от пилотажно-навигационного интерфейса, причем указанные данные связаны с предстоящим ударом.
[0091] Кроме того, раскрыто устройство, в котором данные, связанные с предстоящим ударом, содержат одно или более из следующего: прогнозируемые условия удара, рельеф местности, скорость воздушного летательного аппарата, ускорение воздушного летательного аппарата, высота воздушного летательного аппарата, вес воздушного летательного аппарата и рассчитанные характеристики удара.
[0092] Кроме того, раскрыто устройство, в котором датчик веса содержит тензодатчик, функционально соединенный с энергопоглощающим элементом сиденья.
[0093] Еще в одном аспекте настоящего изобретения предложен материальный машиночитаемый носитель, содержащий сохраненные на нем инструкции, которые, при их исполнении, обусловливают выполнение процессором устройства управления сиденьем воздушного летательного аппарата: приема данных о весе пассажира от датчика веса сиденья и расчета ударной нагрузки на энергопоглощающий элемент, функционально соединенный с сиденьем, на основании принятых данных о весе.
[0094] Кроме того, охарактеризован машиночитаемый носитель, содержащий хранящиеся на нем инструкции, которые, при их исполнении, дополнительно обусловливают прием процессором данных об относительном положении чашки сиденья на основании данных датчика положения, скрепленного с сиденьем, причем ударную нагрузку дополнительно рассчитывают на основании относительного положения чашки.
[0095] Кроме того, охарактеризован машиночитаемый носитель, содержащий хранящиеся на нем инструкции, которые, при их исполнении, дополнительно обусловливают настройку процессором энергопоглощающего элемента на рассчитанную ударную нагрузку.
[0096] Кроме того, охарактеризован машиночитаемый носитель, содержащий хранящиеся на нем инструкции, которые, при их исполнении, дополнительно повторный расчет процессором ударной нагрузки на основании прогнозируемых условий удара.
[0097] Кроме того, охарактеризован машиночитаемый носитель, который содержит хранящиеся на нем инструкции и в котором прогнозируемые условия удара содержат одно или более из следующего: рельеф местности, скорость воздушного летательного аппарата, ускорение воздушного летательного аппарата, высота воздушного летательного аппарата, вес воздушного летательного аппарата, и рассчитанные характеристики удара.
[0098] Несмотря на то, что в настоящем документе были раскрыты конкретные примеры способов, устройства и промышленных изделий, объем настоящего патента не ограничен ими. Наоборот, настоящий патент охватывает все способы, устройство и изделия промышленного производства, находящиеся в пределах объема формулы изобретения настоящего патента. Несмотря на то, что воздушный летательный аппарат/транспортные средства описаны в примерах, раскрытых в настоящем документе, примеры, раскрытые в настоящем документе, могут быть применены и к любым другим подходящим примерам, в которых сиденья используют для изменения нагрузки, передаваемой пассажиру, занявшему сиденье.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОПОГЛОЩАЮЩЕЕ КРЕСЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2500582C2 |
| Энергопоглощающее вертолётное кресло К-1 | 2016 |
|
RU2623859C1 |
| КРЕСЛО ЭНЕРГОПОГЛОЩАЮЩЕЕ | 2012 |
|
RU2509284C1 |
| СПОСОБ ОБРАТИМОЙ АДАПТАЦИИ И ЭНЕРГОПОГЛОЩЕНИЯ КРЕСЛА ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2699461C1 |
| АМОРТИЗАЦИОННОЕ КРЕСЛО | 2000 |
|
RU2198827C2 |
| ЭНЕРГОПОГЛОЩАЮЩЕЕ КРЕСЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2611326C1 |
| ЭНЕРГОПОГЛОЩАЮЩЕЕ СИДЕНЬЕ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ | 2018 |
|
RU2695947C1 |
| КРЕСЛО ОПЕРАТОРА СЕЙСМОСТОЙКОЕ (ВАРИАНТЫ) | 2017 |
|
RU2668203C1 |
| СИСТЕМА ПАССИВНОЙ БЕЗОПАСНОСТИ ПОЛЬЗОВАТЕЛЯ СИДЕНЬЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2570122C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125943C1 |
Управляемое поглощение энергии сидений при ударе. Один из раскрытых примеров способа включает этапы, согласно которым: определяют вес пассажира, занявшего сиденье воздушного летательного аппарата, определяют доступный ход сиденья, рассчитывают, с использованием процессора, ударную нагрузку на энергопоглощающий элемент сиденья, функционально соединенный с сиденьем, на основании веса пассажира и определенного доступного хода сиденья, и настраивают энергопоглощающий элемент сиденья на рассчитанную ударную нагрузку. 3 н. и 14 з.п. ф-лы, 15 ил.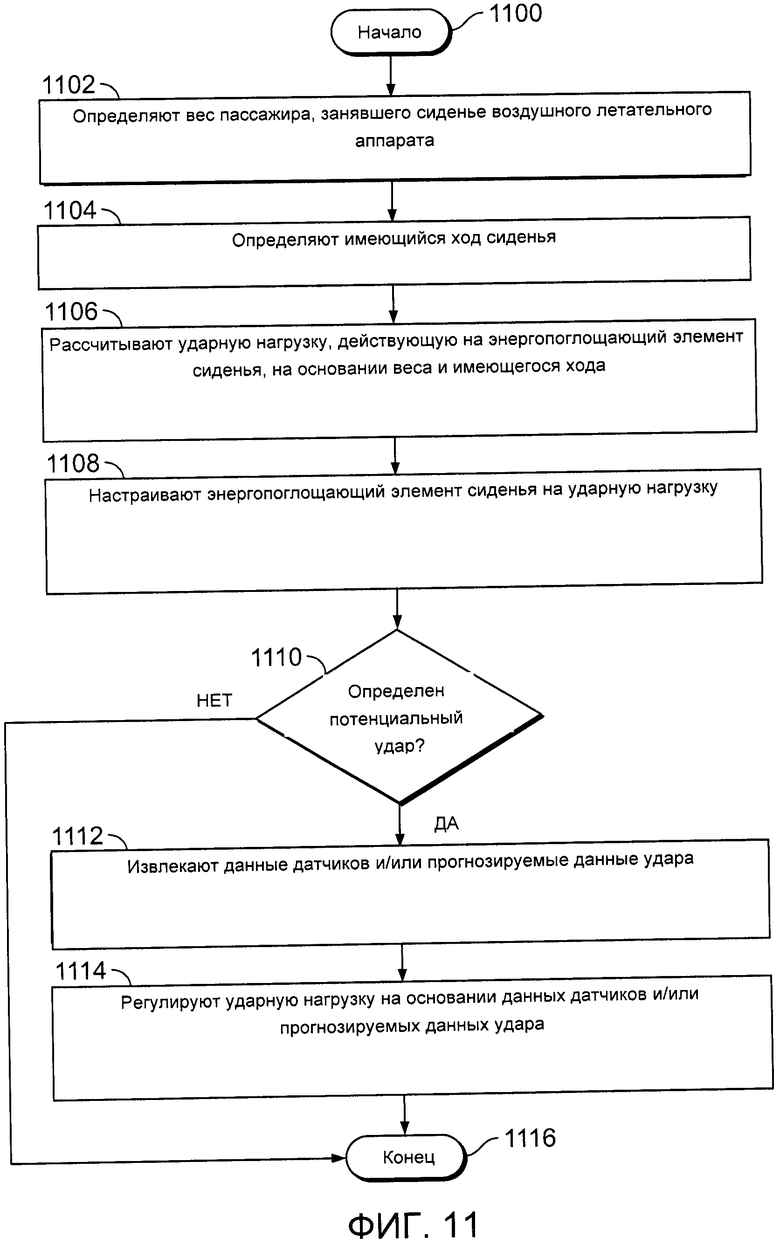
1. Способ настройки энергопоглощающего элемента сиденья, согласно которому:
определяют вес пассажира, занявшего сиденье воздушного летательного аппарата,
определяют доступный ход сиденья,
рассчитывают, с использованием процессора, ударную нагрузку на энергопоглощающий элемент сиденья, функционально соединенный с сиденьем, на основании веса пассажира и определенного доступного хода сиденья, и
настраивают энергопоглощающий элемент сиденья на рассчитанную ударную нагрузку.
2. Способ по п. 1, согласно которому доступный ход определяют на основании данных оптического датчика.
3. Способ по п. 1, согласно которому ударная нагрузка дополнительно основана на условиях удара.
4. Способ по п. 1, согласно которому энергопоглощающий элемент сиденья настраивают на рассчитанную ударную нагрузку перед взлетом воздушного летательного аппарата.
5. Способ по п. 1, дополнительно включающий этап, согласно которому повторно рассчитывают ударную нагрузку на основании условий прогнозируемого удара.
6. Способ по п. 5, согласно которому повторный расчет ударной нагрузки дополнительно основан на одном или более из следующего:
рельеф местности,
скорость воздушного летательного аппарата,
ускорение воздушного летательного аппарата,
высота воздушного летательного аппарата,
вес воздушного летательного аппарата и
рассчитанные характеристики удара.
7. Способ по п. 1, согласно которому вес определяют тензодатчиком при нахождении воздушного летательного аппарата на земле.
8. Устройство регулировки энергопоглощающего элемента сиденья, содержащее:
датчик веса на сиденьи воздушного летательного аппарата,
датчик положения, выполненный с возможностью определения положения чашки сиденья по отношению к раме сиденья,
энергопоглощающий элемент сиденья, функционально соединенный с сиденьем,
привод, функционально соединенный с энергопоглощающим элементом сиденья, и
процессор, соединенный с возможностью связи с приводом и выполненный с возможностью расчета ударной нагрузки на энергопоглощающий элемент сиденья на основании данных о весе пассажира от датчика веса и относительного положения чашки сиденья по отношению к раме сиденья, полученного от датчика положения,
причем привод выполнен с возможностью регулировки энергопоглощающего элемента сиденья на основании рассчитанной ударной нагрузки.
9. Устройство по п. 8, в котором датчик положения содержит оптический датчик.
10. Устройство по п. 8, в котором привод содержит вращательный двигатель.
11. Устройство по п. 8, в котором ударная нагрузка повторно рассчитана на основании данных, принятых из пилотажно-навигационного интерфейса и связанных с предстоящим ударом.
12. Устройство по п. 11, в котором данные, связанные с предстоящим ударом, содержат одно или более из следующего:
прогнозируемые условия удара,
рельеф местности,
скорость воздушного летательного аппарата,
ускорение воздушного летательного аппарата,
высота воздушного летательного аппарата,
вес воздушного летательного аппарата и
рассчитанные характеристики удара.
13. Устройство по п. 8, в котором датчик веса содержит тензодатчик, функционально соединенный с энергопоглощающим элементом сиденья.
14. Материальный машиночитаемый носитель, содержащий хранящиеся на нем инструкции, которые, при их исполнении, обусловливают выполнение процессором устройства управления сиденьем воздушного летательного аппарата:
приема веса пассажира от датчика веса сиденья,
приема данных об относительном положении чашки сиденья от датчика положения и
расчета ударной нагрузки энергопоглощающего элемента, функционально соединенного с сиденьем, на основании принятых данных о весе и относительном положении чашки сиденья.
15. Машиночитаемый носитель по п. 14, содержащий инструкции, которые, при их исполнении, дополнительно обусловливают настройку процессором энергопоглощающего элемента на рассчитанную ударную нагрузку.
16. Машиночитаемый носитель по п. 15, содержащий инструкции, которые, при их исполнении, дополнительно обусловливают повторный расчет процессором ударной нагрузки на основании прогнозируемых условий удара.
17. Машиночитаемый носитель по п. 16, в котором прогнозируемые условия удара содержат одно или более из следующего:
рельеф местности,
скорость воздушного летательного аппарата,
ускорение воздушного летательного аппарата,
высота воздушного летательного аппарата,
вес воздушного летательного аппарата и
рассчитанные характеристики удара.
| US 2011035118 A1, 10.02.2011 | |||
| US 8991569 B1, 31.03.2015 | |||
| US 2007278723 A1, 06.12.2007. |

