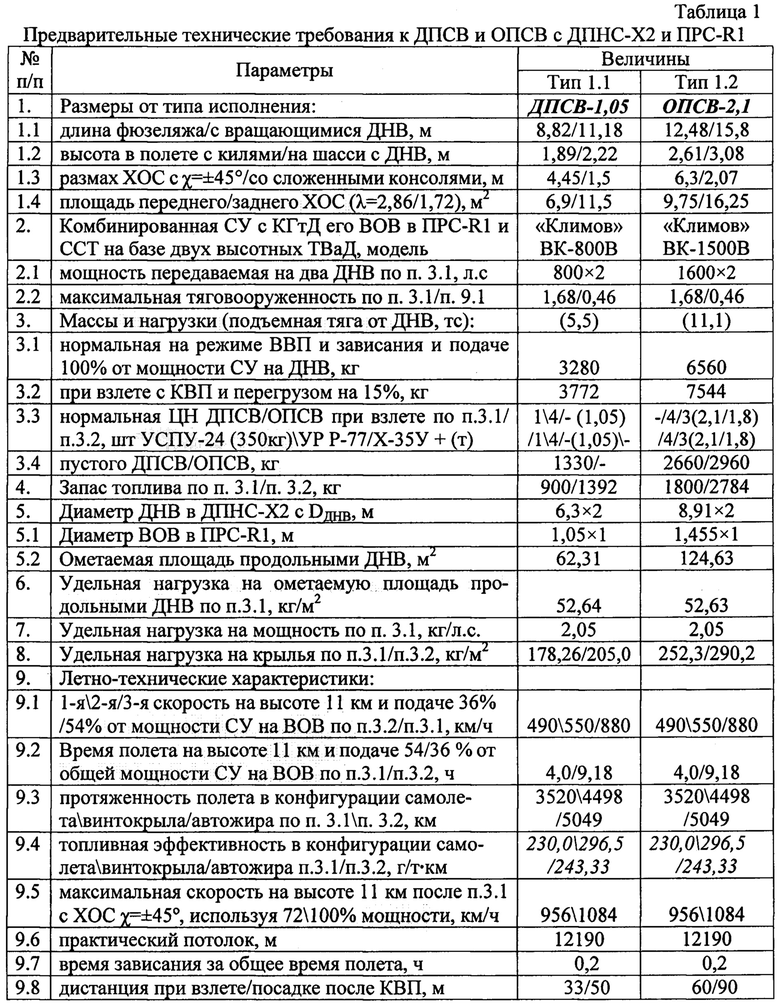
Изобретение относится к авиационно-ракетным ударным системам с опционально и дистанционно пилотируемыми самолетами-вертолетами, имеющими крылья асимметричной стреловидности (КАС), двухлопастные несущие винты (ДНВ), смонтированные над передним и задним КАС, и в кормовой гондоле комбинированный двигатель со свободными силовыми турбинами, приводящими два продольных ДНВ и/или в кольцевом обтекателе выносной вентилятор, создающий при вертикальном и коротком взлете/посадке пропульсивно-реактивную тягу, направленную горизонтально назад с работающими/авторотирующими ДНВ или зеркально зафиксированными их лопастями-крыльями асимметричной стреловидности (ЛКАС) соответствующему КАС в конфигурации палубных реактивных винтокрыла/автожира или самолета с тандемными крыльями Х-образной стреловидности и управляемыми ракетами, перевозимых со сложенными ЛКАС, консолями КАС и инвертированных V-образных килей в ангаре авианесущего корабля для заправки их топливом и заряжания боекомплектом.
Известен комплекс для поражения подводных лодок (ПЛ) на больших дальностях, патент RU 2371668 С2, выполненный в виде баллистической ракеты (БР), в носовой части которой под сбрасываемым обтекателем размещена крылатая ракета (КР); БР содержит аэродинамические поверхности с приводами и разгонный двигатель для обеспечения доставки КР на дальность стрельбы к району расположения цели. Для экономичного полета в атмосфере КР состыкована с разгонным двигателем посредством устройства отделения, выполнена с возможностью полета в районе расположения ПЛ-цели и содержит отделяемую боевую часть (БЧ) подводного действия и отделяемый радиогидроакустический буй; система управления КР снабжена аппаратурой для приема информации от радиогидроакустического буя по радиоканалу о местонахождения цели. В соответствии с командами, осуществляющими поиск цели, ее обнаружение, сближение с целью и ее поражение путем подрыва БЧ. После чего БР-носитель продолжает полет с работающим двигателем, уводя ее от места приводнения БЧ подводного действия, чтобы не создавать помех системе ее самонаведения. Сама же одноразовая БР уходила из района приводнения БЧ и самоликвидировалась.
Известен экспериментальный самолет модели AD-1 (Ames Dry den) [1] с крылом асимметрично изменяемой стреловидности компании Ames (США) содержит высокорасположенное крыло, смонтированное на поворотном в горизонтальной плоскости шарнире для изменения противоположной стреловидности его консолей, фюзеляж с хвостовым оперением и трехопорным убирающимся колесным шасси.
Самолет Ames модели AD-1 с крылом асимметрично изменяемой стреловидности (КАИС) и удельной нагрузкой на крыло 113 кг/м2, имеет длину фюзеляжа 10,0 м и высоту на шасси 2,06 м, а также размах крыла при стреловидности 60°/0° соответственно 4,93/9,86 м и площадь крыла 8,64 м2. При взлетной массе 973 кг масса пустого составит 658 кг и реактивной тяге двух ТРД Microturbo TRS18-046 2×1,8 кН. Самолеты с изменяемой стреловидностью крыла имеют ряд недостатков, основными из которых являются: смещение аэродинамического фокуса при изменении стреловидности, что приводит к увеличению балансировочного сопротивления; возрастание массы конструкции из-за наличия силовой балки и закрепляемых на ней поворотных шарниров консолей, а также уплотнителей убранного положения крыла. Оба недостатка приводят в конечном итоге к уменьшению дальности полета или массы перевозимой полезной нагрузки. Испытания самолет с КАИС показали, что лобовое сопротивление уменьшится на 11-20%, масса конструкции - на 14%, волновое сопротивление при полете на транс- и сверхзвуковых скоростях - на 26%. Однако применение КАИС влечет за собой и ряд недостатков. Во-первых, при большом угле 45° стреловидности консоль с прямой стреловидностью имеет больший эффективный угол атаки, чем консоль с обратной стреловидностью, что приводит к асимметрии лобового сопротивления и, как следствие, к возникновению паразитных разворачивающих моментов по крену, тангажу и рысканию. Во-вторых, для КАИС характерны вдвое больший рост толщины пограничного слоя вдоль размаха, и любой несимметричный срыв потока вызывает интенсивные возмущения, а их устранение и повышение целевой нагрузки (ЦН) может быть осуществлено путем применения тандемных КАИС.
Наиболее близким к предлагаемому изобретению является британский палубный противолодочный авиационный комплекс (ПЛАК) модели "Icara" [2] с беспилотным летательным аппаратом (БЛА), имеющим фюзеляж с комплексом вооружения на пусковых устройствах (ПУ), крыло с органами управления, двигатель силовой установки (СУ), бортовую систему управления (БСУ), обеспечивающую телемеханическое управление с командного пункта (КП) корабля-носителя.
Признаки, совпадающие - габариты БЛА без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м. Боевая часть: самонаводящаяся противолодочная малогабаритная торпеда (МГТ) Мк. 44. Летные характеристики: максимальная и минимальная высота полета соответственно 300 м и 15-20 м. Ввиду значительного веса БЛА с торпедой Мк. 44 составляющего 1480 кг (при массе 13% целевой нагрузки - торпеды 196 кг, ее длине 2,57 м и диаметре 324 мм) и малых дальности 24 км и скорости полета 140-240 м/с, а боевой части (торпеды - 30 узлов и дальность хода 5 км).
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели сбрасываемую торпеду. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем передавал их через радиокомандную систему управления на БЛА в полете. По прибытии БЛА в район нахождения ПЛ-цели торпеда (самонаводящаяся МГТ Мк. 44), полу утопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск ПЛ-цели. После чего БЛА продолжает полет с работающей СУ, уводя ее от места приводнения самонаводящейся МГТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном палубном ПЛАК модели "Icara" (Великобритания) увеличения целевой нагрузки и весовой отдачи, повышения скорости и дальности полета, увеличения вероятности поражения подводной или надводной цели, расположенной на большой дальности, но и возможности ее атаки после продолжительного полета в режиме зависания, возврата на вертолетную площадку авианесущего корабля для повторного использования.
Отличительными признаками предлагаемого изобретения от указанного выше известного ПЛАК модели "Icara", наиболее близкой к нему, являются наличие того, что авиационно-ракетная ударная система (АРУС) имеет группу аппаратов вертикального взлета и посадки корабельного базирования, включающую более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ), используемую, по меньшей мере, с одной вертолетной площадки авианесущего корабля (АНК), причем каждый ОПСВ и ДПСВ в конвертируемой компоновке тандем с высокорасположенными крыльями асимметричной стреловидности (КАС) снабжен в двухвинтовой продольно-несущей схеме (ДПНС) на передней и задней колонках валов двумя двухлопастными несущими винтами (ДНВ), смонтированными над соответствующим КАС, создающими в ДПНС-Х2 вертикальную тягу только при вертикальном и коротком взлете/посадке (ВВП и КВП) или на переходных режимах полета и, по меньшей мере, одним комбинированным газотурбинным двигателем (КГтД), выполненным в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с, по меньшей мере, одним выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и, по меньшей мере, одной свободной силовой турбиной (ССТ), снабженной передним выводом вала для отбора мощности и ее передачи на главный редуктор, перераспределяющий взлетную мощность СУ при выполнении ВВП, зависания или высокоскоростном крейсерском полете соответственно между широкохордовыми ДНВ в ДПНС-Х2 и/или, например, на один ВОВ, имеющий лопатки с большой его круткой и работающий по тянущей схеме для создания в пропульсивно-реактивной системе (ПРС-R1) маршевой тяги, направленной горизонтально и параллельно оси симметрии на переходных режимах полета, при выполнении ВВП и КВП или горизонтальном поступательном полете, но и имеющим переднее и заднее трапециевидные КАС, выполненные равновеликими с двумя лопастями соответствующих ДНВ, смонтированные на соответствующих верхних пилонах или обтекателях фюзеляжа, обеспечивающих размещение левых и правых или правых и левых консолей КАС с образованием соответственно разнонаправленной стреловидности χ=-45° и χ=+45° при разновеликой площади переднего и заднего КАС, площадь последнего большего КАС составляет 62,5% от обшей площади двух КАС, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения короткого или вертикального взлета соответственно с винтокрыла или вертолета с ДПНС-Х2 в соответствующие, например, реактивные скоростной автожир для барражирующего полета или самолет бипланной схемы тандем при максимальном или нормальном взлетном весе соответственно с передним и задним трапециевидными ДНВ, работающими на режимах их авторотации или в качестве верхних соответствующих лопастей-крыльев асимметричной стреловидности (ЛКАС), снабженных возможностью синхронного фиксирования ЛКАС с одновременной как организацией при виде сверху асимметричных несущих поверхностей двух ДНВ, так и трансформацией ДНВ, осуществляемой на переходных режимах полета последовательно, когда после взлетного режима, набора высоты и выполнения разгонного полета лопасти переднего и заднего ДНВ одновременно остановлены так, что их лопасти размещены в плане в противоположные стороны от оси симметрии при одновременном фиксировании двух их ЛКАС* правые и левые или левые и правые лопасти ДНВ которых имеют соответственно разнонаправленную стреловидность с углом χ=-45° и χ=+45° по передним кромкам их ЛКАС, организуют для крейсерских высокоскоростных режимов полета в самолетной конфигурации зеркально-асимметричные ЛКАС соответствующему КАС, имеющему наравне с консолями ЛКАС закругленные или треугольные в плане законцовки, и образуют совместно с разнонаправленными консолями переднего и заднего КАС соответствующие Х-образные стреловидности (ХОС) при соответствующем угле стреловидности χ=±45° ЛКАС, но и преобразуют большое и умеренное удлинение переднего и заднего ЛКАС с λ=5,73-8,14 и λ=3,44-4,88 до малого удлинения их передней и задней системы бипланных крыльев ХОС с λ=2,86-4,07 и λ=1,72-2,44 в полетной конфигурации самолета с тандемными крыльями ХОС, но и обратно.
Кроме того, в упомянутых ОПСВ и ДПСВ набегающий поток при самолетном и вертолетном режимах полета встречают одновременно передние кромки зафиксированных ЛКАС и наступающих лопастей переднего и заднего ДНВ, которые, вращаясь, например, соответственно против и по часовой стрелки в ДПНС-Х2, имеют отступающие их левую и правую лопасти с передними и задними их кромками, превращающимися в прямом полете, изменяя после установки на противоположный угол их атаки, в задние и передние кромки зафиксированных консолей неподвижного переднего и заднего ЛКАС/КАС, имеющих с противолежащими их лопастями/консолями равновеликий или меньший угол атаки с адаптивной зависимостью, исключающей несимметричный срыв потока вдоль размаха их ЛКАС/КАС, а лопасти/консоли каждого их ЛКАС/КАС имеют симметричный профиль, который в диапазоне параметров угла их атаки α=3°…α=8° и относительной их толщины  обеспечивают, увеличивая скорость потока между задними вихрями через верхнюю поверхность чечевицеобразного или ромбовидного профиля, имеющего закругленные углы на его меньшей диагонали, значительное снижении сопротивления за счет того, что нижний задний вихрь, смещаясь назад от задней кромки ЛКАС/КАС, уменьшит площадь поперечного сечения нижнего вихря при значительном увеличении потока над верхней поверхностью профиля в продолжение передней четверти поверхности, вызывая значительное более низкое распределение давления в этой части профиля, а их V-образные кили с рулевыми поверхностями, смонтированные при виде спереди по внешним бортам хвостовой балки вниз и наружу под углом 47° от плоскости симметрии, размещенные в плане между консолей задней ХОС, имеют спереди и сзади на концах их законцовок соответствующие пары инфракрасных (ИК) излучателей с ИК-приемниками, а длина их фюзеляжа в 1,4…1,5 раза больше диаметра ДНВ, что обеспечивает размещение их лопастей без выноса от концов фюзеляжа в походно-транспортной или полетно-транспортной конфигурации с предварительно сложенными вниз их ЛКАС наравне со сложенными вниз левыми и правыми как консолями КАС, размещенными соответственно спереди и сзади от оси вращения соответствующего ДНВ и параллельно плоскости симметрии, так и инвертированными V-образными килями, складываемыми к плоскости симметрии, размещаясь в соответствующих кормовых утонченностях фюзеляжа и вдоль боковых его сторон, высота которых с килями не превышает высоту фюзеляжа со стойками колес шасси в стояночной конфигурации, уменьшающей в 5,3-6,0 раза стояночную площадь от взлетной площади, а в их системе трансмиссии упомянутый КГтД размещен за центром масс в кормовой гондоле, в которой между ВОВ и одной или двумя ССТ смонтирован соос-но с последними промежуточный редуктор, имеющий продольные по его оси как один или два входных вала от ССТ, так и продольные выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на главный редуктор, имеющий продольные передний и задний входные валы с соответствующими угловыми редукторами, вертикальные колонки валов которых установлены в плане на продольной оси фюзеляжа, равноудалены в плане от центра масс и являются вертикальными соосными осями центрирующих узлов соответствующих КАС, но и имеют валы ДНВ, выходящие из них и размещенные с втулками ДНВ над КАС, причем на режимах ВВП и зависания упомянутых ОПСВ и ДПСВ при удельной нагрузке на мощность их СУ, составляющей ρN=2,05 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности ДПНС-Х2, составляющей ρВТ=1,68, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ДНВ соответственно как от двух работающих ССТ, так и от одной из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между двумя ДНВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяго-вооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,23 или ρвт=1,11, обеспечит два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, при этом в каждой ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их фюзеляжа, и дисков вращения их ДНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией; определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, причем на режимах ВВП и зависания ОПСВ и ДПСВ упомянутые их ДНВ выполнены с жестким креплением их лопастей и автоматом прекоса, управляющим балансировкой по курсу, крену и тангажу посредством соответствующего изменения циклического и общего шага ДНВ, а их хвостовая балка на ее конце снабжена профилированной концевой частью, которая, образуя несущую поверхность, интегрирована по внешним ее бортам с килями хвостового оперения и имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно скошенным задним кромкам плоских сопел КГтД, имеющих термопоглощающее покрытие, уменьшающее ИК-заметность, при этом планер упомянутых ОПСВ и ДПСВ выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, а их упомянутый фюзеляж, имеющий скошенные их боковые стороны в соответствующих его носовой, центральной и кормовой частях, включая и гондолу КГтД с плоскими соплами, уменьшая эффективную площадь рассеивания, образуют при виде спереди пятигранное или шестигранное поперечное сечение, но и среднюю часть фюзеляжа граненной конфигурации с острой средней линией, непрерывно распространяющейся от носа до хвоста, снабжен снизу отсеками колесного шасси и ПУ вооружения в бомбоотсеках, каждый их которых имеет автоматические створки с пилообразными поперечными и продольными их сторонами, причем упомянутые ОПСВ и ДПСВ, несущие как авиационные управляемые ракеты воздух-воздух или воздух-поверхность, обеспечивают соответствующую борьбу с воздушной целью или надводным кораблем (НК-целью), так и, например, четырех-ствольный пулемет типа ЯкБЮ-12,7 [3], смонтированный в обтекателе под носовой частью фюзеляжа и поражающей дозвуковые ударные БЛА и крылатые ракеты, при этом в ОПСВ и ДПСВ их БСУ имеет как радиолокационную станцию с передатчиком команд, так и оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при барражирующем полете самостоятельное нахождение цели, идентификации ее и принятие подтвержденного решения от оператора АНК об уничтожении им выбранных, например, БЛА или крылатой ракеты, причем при противолодочной обороне в упомянутом ОПСВ используется опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на АНК для обработки в реальном масштабе времени при обнаружении подводной лодки (ПЛ), но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на АНК и его КП, при этом в процессе наведения одной или двух авиационных противолодочных ракет (АПР) залпа на цель автоматически определяется значение вводимого адаптивного угла упреждения, который при сближении с целью корректируется, причем введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом, обеспечивающим попадание одной или двумя АПР залпа преимущественно в прочный корпус ПЛ-цели, причем при противокорабельной обороне упомянутые ОПСВ и ДПСВ, использующие полетную конфигурацию реактивного самолета с зафиксированными ЛКАС ДНВ, несущие в бомбоотсеке соответствующие ПКР Х-35У или ПКР Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом радаром типа Н036 [4] с головного ОПСВ обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны ДПСВ - станцию активных электронных помех, причем при достижении области, из которой будет поражена НК-цель, упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1560 км автоматически возвращается на АНК с вертикальной на его вертолетную площадку посадкой, при этом упомянутая БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми, например, двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного ОПСВ, а другой - управляется вторым пилотом с головного ОПСВ, а затем наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете.
обеспечивают, увеличивая скорость потока между задними вихрями через верхнюю поверхность чечевицеобразного или ромбовидного профиля, имеющего закругленные углы на его меньшей диагонали, значительное снижении сопротивления за счет того, что нижний задний вихрь, смещаясь назад от задней кромки ЛКАС/КАС, уменьшит площадь поперечного сечения нижнего вихря при значительном увеличении потока над верхней поверхностью профиля в продолжение передней четверти поверхности, вызывая значительное более низкое распределение давления в этой части профиля, а их V-образные кили с рулевыми поверхностями, смонтированные при виде спереди по внешним бортам хвостовой балки вниз и наружу под углом 47° от плоскости симметрии, размещенные в плане между консолей задней ХОС, имеют спереди и сзади на концах их законцовок соответствующие пары инфракрасных (ИК) излучателей с ИК-приемниками, а длина их фюзеляжа в 1,4…1,5 раза больше диаметра ДНВ, что обеспечивает размещение их лопастей без выноса от концов фюзеляжа в походно-транспортной или полетно-транспортной конфигурации с предварительно сложенными вниз их ЛКАС наравне со сложенными вниз левыми и правыми как консолями КАС, размещенными соответственно спереди и сзади от оси вращения соответствующего ДНВ и параллельно плоскости симметрии, так и инвертированными V-образными килями, складываемыми к плоскости симметрии, размещаясь в соответствующих кормовых утонченностях фюзеляжа и вдоль боковых его сторон, высота которых с килями не превышает высоту фюзеляжа со стойками колес шасси в стояночной конфигурации, уменьшающей в 5,3-6,0 раза стояночную площадь от взлетной площади, а в их системе трансмиссии упомянутый КГтД размещен за центром масс в кормовой гондоле, в которой между ВОВ и одной или двумя ССТ смонтирован соос-но с последними промежуточный редуктор, имеющий продольные по его оси как один или два входных вала от ССТ, так и продольные выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на главный редуктор, имеющий продольные передний и задний входные валы с соответствующими угловыми редукторами, вертикальные колонки валов которых установлены в плане на продольной оси фюзеляжа, равноудалены в плане от центра масс и являются вертикальными соосными осями центрирующих узлов соответствующих КАС, но и имеют валы ДНВ, выходящие из них и размещенные с втулками ДНВ над КАС, причем на режимах ВВП и зависания упомянутых ОПСВ и ДПСВ при удельной нагрузке на мощность их СУ, составляющей ρN=2,05 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности ДПНС-Х2, составляющей ρВТ=1,68, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ДНВ соответственно как от двух работающих ССТ, так и от одной из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между двумя ДНВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяго-вооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,23 или ρвт=1,11, обеспечит два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, при этом в каждой ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их фюзеляжа, и дисков вращения их ДНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией; определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, причем на режимах ВВП и зависания ОПСВ и ДПСВ упомянутые их ДНВ выполнены с жестким креплением их лопастей и автоматом прекоса, управляющим балансировкой по курсу, крену и тангажу посредством соответствующего изменения циклического и общего шага ДНВ, а их хвостовая балка на ее конце снабжена профилированной концевой частью, которая, образуя несущую поверхность, интегрирована по внешним ее бортам с килями хвостового оперения и имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно скошенным задним кромкам плоских сопел КГтД, имеющих термопоглощающее покрытие, уменьшающее ИК-заметность, при этом планер упомянутых ОПСВ и ДПСВ выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, а их упомянутый фюзеляж, имеющий скошенные их боковые стороны в соответствующих его носовой, центральной и кормовой частях, включая и гондолу КГтД с плоскими соплами, уменьшая эффективную площадь рассеивания, образуют при виде спереди пятигранное или шестигранное поперечное сечение, но и среднюю часть фюзеляжа граненной конфигурации с острой средней линией, непрерывно распространяющейся от носа до хвоста, снабжен снизу отсеками колесного шасси и ПУ вооружения в бомбоотсеках, каждый их которых имеет автоматические створки с пилообразными поперечными и продольными их сторонами, причем упомянутые ОПСВ и ДПСВ, несущие как авиационные управляемые ракеты воздух-воздух или воздух-поверхность, обеспечивают соответствующую борьбу с воздушной целью или надводным кораблем (НК-целью), так и, например, четырех-ствольный пулемет типа ЯкБЮ-12,7 [3], смонтированный в обтекателе под носовой частью фюзеляжа и поражающей дозвуковые ударные БЛА и крылатые ракеты, при этом в ОПСВ и ДПСВ их БСУ имеет как радиолокационную станцию с передатчиком команд, так и оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при барражирующем полете самостоятельное нахождение цели, идентификации ее и принятие подтвержденного решения от оператора АНК об уничтожении им выбранных, например, БЛА или крылатой ракеты, причем при противолодочной обороне в упомянутом ОПСВ используется опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на АНК для обработки в реальном масштабе времени при обнаружении подводной лодки (ПЛ), но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на АНК и его КП, при этом в процессе наведения одной или двух авиационных противолодочных ракет (АПР) залпа на цель автоматически определяется значение вводимого адаптивного угла упреждения, который при сближении с целью корректируется, причем введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом, обеспечивающим попадание одной или двумя АПР залпа преимущественно в прочный корпус ПЛ-цели, причем при противокорабельной обороне упомянутые ОПСВ и ДПСВ, использующие полетную конфигурацию реактивного самолета с зафиксированными ЛКАС ДНВ, несущие в бомбоотсеке соответствующие ПКР Х-35У или ПКР Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом радаром типа Н036 [4] с головного ОПСВ обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны ДПСВ - станцию активных электронных помех, причем при достижении области, из которой будет поражена НК-цель, упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1560 км автоматически возвращается на АНК с вертикальной на его вертолетную площадку посадкой, при этом упомянутая БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми, например, двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного ОПСВ, а другой - управляется вторым пилотом с головного ОПСВ, а затем наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете.
Кроме того, в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с один или несколькими датчиками, включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом приема-передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей упомянутый следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование упомянутого следящего полета ведомым ДПСВ через компьютер управления полетом.
Кроме того, для экономичного скоростного горизонтального полета упомянутых ОПСВ и ДПСВ в их авторотирующей системе, включающей в упомянутом главном редукторе ДНВ автоматическую коробку передач (АКП), имеющую для привода ДНВ выходные упомянутые валы, которые создают по два потока: первый - взлетный с выдачей соответствующей мощности от КГтД и созданием подъемной тяги от ДНВ, второй - крейсерский в конфигурации автожира с приемом мощности от авторотации ДНВ на ее соответствующую ступень, отключающую ДНВ от привода ССТ упомянутого КГтД, приводящую обратимый электромотор-генератор (ОЭМГ), заряжающий аккумуляторы, и управляющую синхронным снижением и скорости его вращения, например, до 150 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ДНВ, обеспечивающих долю увеличения в 2/5-1/2 раза требуемой подъемной силы их упомянутых КАС, но и плоскостью вращения лопастей ДНВ, которая почти выровнена с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ДНВ на 12-15% от общего сопротивления профиля лопастей ДНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых их КАС с уменьшенной их геометрией, составляющей 3/5-1/2 от габаритов крыла аналогичного реактивного самолета, при этом ОЭМГ, питаемый от аккумуляторов, обеспечивает при воздушном базировании упомянутых ДПСВ на истребителе-носителе (ИН) как запуск ССТ в упомянутом КГтД после раскладывания упомянутых ЛКАС ДНВ из полетно-транспортной в полетную конфигурацию посредством привода АКП упомянутого главного редуктора, отключенного от системы трансмиссии, обеспечивающего следящим приводом АКП требуемое число оборотов ОЭМГ, которое создает требуемый поворот вала каждого ДНВ в горизонтальной плоскости с обеспечением установки и фиксации требуемого угла стреловидности ЛКАС их ДНВ с последующим раскладыванием упомянутых консолей КАС и килей хвостового оперения при соответствующем фиксированном размещении ЛКАС ДНВ, причем при воздушном базировании ДПСВ на палубном ИН, перемещающим на подвесной консоли подфюзеляжного или подкрыльных ПУ, например, один или два ДПСВ с их боекомплектом, используемым и с подвешенного состояния на ИН, и плоскими их боковыми воздухозаборниками, имеющими на их входе сбрасываемые обтекатели или отклоняемые большие их стороны, которые перемещаясь вверх/вниз от/к их пластинчатым отсекателям соответственно открывают/закрывают их вход для уменьшения сопротивления.
Кроме того, для горизонтального полета на высоте 11 км ОПСВ и ДПСВ, достигая маршевой тяговооруженности первого уровня - 0,234 и второго - 0,307, используется соответствующая мощность их СУ 36% и 54% от работающего КГтД на привод их ВОВ в конфигурации упомянутых реактивных крылатого автожира и самолета с ПРС-R1, при этом на высоте полета 11 км в конфигурации реактивного самолета, упомянутые консоли ХОС которого, имея по передним их кромкам стреловидность с углом χ=±45°, обеспечивает при маршевой тяговооруженности второго уровня 0,307 скорость полета 0,79 Маха (М), причем упомянутые консоли ХОС при угле их стреловидности χ=±45°, имея максимальную тяговооруженность 0,374 и 0,46, используется 72% и 100% мощности комбинированной СУ, достигается скорость горизонтального полета М=0,9 и М=1,02 в конфигурации соответственно транс- и сверхзвукового самолета, при этом в ОПСВ и ДПСВ упомянутый их КГтД снабжен перед концом его реактивного сопла форсажной камерой, используемой на взлетных режимах или горизонтальном полете с передними за ВОВ и задними перед форсажной камерой открытыми управляемыми створками кормовой гондолы для дополнительного в нее подвода воздуха, позволит с их перегрузом 15% повысить маршевую тягово-уроженность с 0,46 до 0,69 и скорость с М=0,96 до М=1,02, но и изменить на высоте полета 11 км конфигурацию с транс- до сверхзвукового самолета соответственно.
Наличие этих признаков позволит освоить блочно-модульную АРУС, имеющую группу аппаратов вертикального взлета и посадки корабельного базирования, включающую более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ), используемую, по меньшей мере, с одной вертолетной площадки авианесущего корабля (АНК), причем каждый ОПСВ и ДПСВ в конвертируемой компоновке тандем с высокорасположенными крыльями асимметричной стреловидности (КАС) снабжен в двухвинтовой продольно-несущей схеме (ДПНС) на передней и задней колонках валов двумя двухлопастными несущими винтами (ДНВ), смонтированными над соответствующим КАС, создающими в ДПНС-Х2 вертикальную тягу только при вертикальном и коротком взлете/посадке (ВВП и КВП) или на переходных режимах полета и, по меньшей мере, одним комбинированным газотурбинным двигателем (КГтД), выполненным в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с, по меньшей мере, одним выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и, по меньшей мере, одной свободной силовой турбиной (ССТ), снабженной передним выводом вала для отбора мощности и ее передачи на главный редуктор, перераспределяющий взлетную мощность СУ при выполнении ВВП, зависания или высокоскоростном крейсерском полете соответственно между широкохордовыми ДНВ в ДПНС-Х2 и/или, например, на один ВОВ, имеющий лопатки с большой его круткой и работающий по тянущей схеме для создания в пропульсивно-реактивной системе (ПРС-R1) маршевой тяги, направленной горизонтально назад и параллельно оси симметрии на переходных режимах полета, при выполнении полнении ВВП и КВП или горизонтальном поступательном полете, но и имеющим переднее и заднее трапециевидные КАС, выполненные равновеликими с двумя лопастями соответствующих ДНВ, смонтированные на соответствующих верхних пилонах или обтекателях фюзеляжа, обеспечивающих размещение левых и правых или правых и левых консолей КАС с образованием соответственно разнонаправленной стреловидности χ=-45° и χ=+45° при разновеликой площади переднего и заднего КАС, площадь последнего большего КАС составляет 62,5% от обшей площади двух КАС, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения короткого или вертикального взлета соответственно с винтокрыла или вертолета с ДПНС-Х2 в соответствующие, например, реактивные скоростной автожир для барражирующего полета или самолет бипланной схемы тандем при максимальном или нормальном взлетном весе соответственно с передним и задним трапециевидными ДНВ, работающими на режимах их авторотации или в качестве верхних соответствующих лопастей-крыльев асимметричной стреловидности (ЛКАС), снабженных возможностью синхронного фиксирования ЛКАС с одновременной как организацией при виде сверху асимметричных несущих поверхностей двух ДНВ, так и трансформацией ДНВ, осуществляемой на переходных режимах полета последовательно, когда после взлетного режима, набора высоты и выполнения разгонного полета лопасти переднего и заднего ДНВ одновременно остановлены так, что их лопасти размещены в плане в противоположные стороны от оси симметрии при одновременном фиксировании двух их ЛКАС, правые и левые или левые и правые лопасти ДНВ которых имеют соответственно разнонаправленную стреловидность с углом χ=-45° и χ=+45° по передним кромкам их ЛКАС, организуют для крейсерских высокоскоростных режимов полета в самолетной конфигурации зеркально-асимметричные ЛКАС соответствующему КАС, имеющему наравне с консолями ЛКАС закругленные или треугольные в плане законцовки, и образуют совместно с разнонаправленными консолями переднего и заднего КАС соответствующие Х-образные стреловидности (ХОС) при соответствующем угле стреловидности χ=±45° ЛКАС, но и преобразуют большое и умеренное удлинение переднего и заднего ЛКАС с λ=5,73-8,14 и λ=3,44-4,88 до малого удлинения их передней и задней системы бипланных крыльев ХОС с λ=2,86-4,07 и λ=1,72-2,44 в полетной конфигурации самолета с тандемными крыльями ХОС, но и обратно. Все это позволит в ОПСВ и ДПСВ с тандемными крыльями ХОС упростить управляемость и обеспечить ее стабильность. В конфигурации реактивных автожира с авторотирующей и самолета с системой крыльев ХОС, первая из них снабжена многоскоростной автоматической коробкой передач, управляющей снижением скорости вращения ДНВ до 150 мин-1 или 100 мин-1 и углом атаки лопастей ДНВ, но и плоскостью их вращения. Что приводит к уменьшению вращательного сопротивления ДНВ на 15%. В случае отказа ССТ на режимах ВВП и зависания КГтД выполнен с автоматическим выравниванием и равным перераспределением при этом оставшейся мощности ССТ для привода ДНВ, что повышает безопасность. Размещение КГтД с ССТ в кормовой гондоле упрощает трансмиссию и в конфигурации реактивных автожира/самолета обеспечивает скорости полета 550/880 км/ч. На форсажных режимах полета и высоте 11 км ОПСВ достигает сверхзвуковой скорости полета 1084…1105 км/ч.
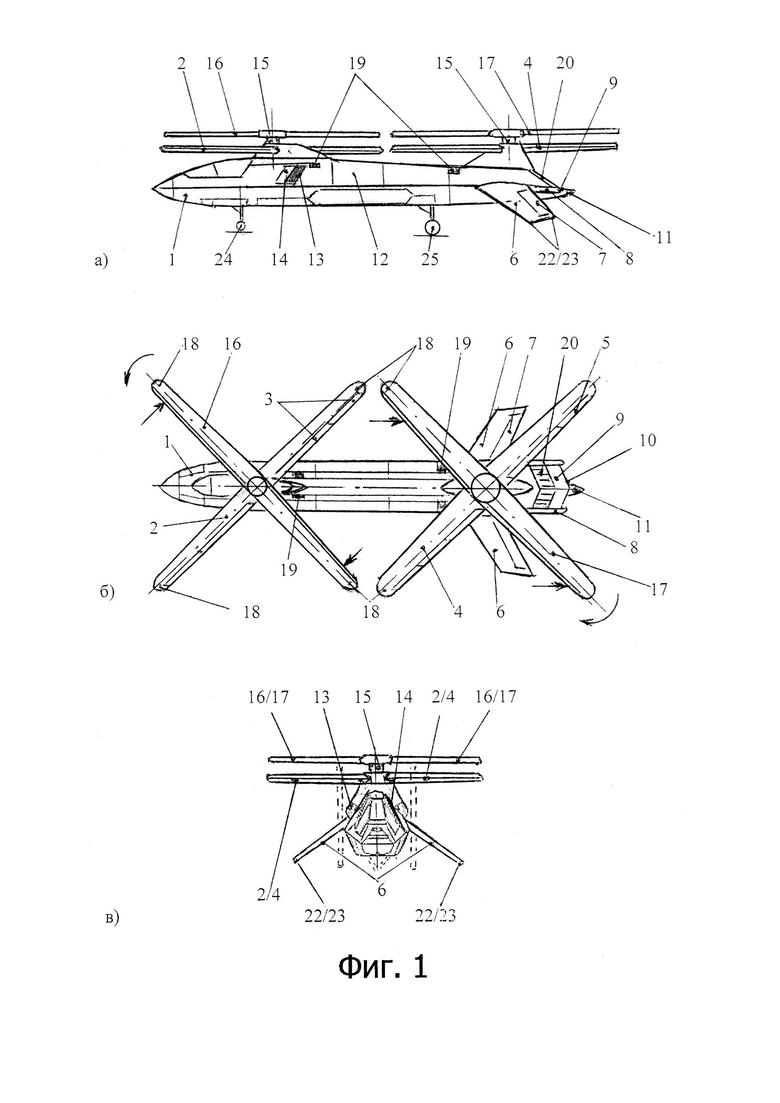
Предлагаемое изобретение блочно-модульной АРУ С с палубными ОПСВ и ДПСВ, имеющими трапециевидные КАС и в кормовой гондоле КГтД с двумя ССТ, приводящими ДНВ в ДПНС-Х2 и/или ВОВ в ПРС-R1 с плоскими соплами, иллюстрируется на фиг.1 и общих видах сбоку, сверху и спереди соответственно а), б) и в):
а) в полетной конфигурации реактивных вертолета и винтокрыла с КГтД и ССТ, приводящими системой трансмиссии соответственно ДНВ и ДНВ и ВОВ в ПРС-R1, и продольными ДНВ, вращающимися над КАС, создающими подъемную силу;
б) в полетной конфигурации вертолета и самолета с ДНВ, показанные условно со сдвоенными передними кромками и потоком воздуха, направленным соответственно перпендикулярно передней кромке ДНВ и параллельно оси симметрии заднего ЛКАС, зафиксированного зеркально заднему КАС в ХОС со стреловидностью χ=±45°;
в) в полетной конфигурации самолета с системой тандемных крыльев ХОС и сложенных вниз V-образных килей, КАС и ЛКАС, показанных условно пунктиром.
Блочно-модульная АРУС с палубными ОПСВ и двумя ДПСВ представлена на фиг. 1 одним ОПСВ, выполненным по концепции ДПНС-Х2 и ПРС-R1, имеет планер из алюминиевых сплавов и композитного углепластика, содержит фюзеляж 1, трапециевидные переднее КАС 2 с закрылками 3 и заднее КАС 4 с элевонами 5. Инвертированные V-образные кили 6 с рулевыми поверхностями 7, смонтированы при виде спереди по внешним бортам хвостовых балок 8, интегрированных с профилированной кормовой частью 9 фюзеляжа 1, имеющей V-образную в плане заднюю кромку 10, снабженной по оси симметрии кормовым обтекателем 11, имеющим выдвижную штангу магнитометра и опускаемую лебедкой и буксируемую на тросе под водой антенну гидроакустической станции (на фиг. 1 не показано). Две ССТ в КГтД установлены в кормовой гондоле 12 с ССТ, кольцевым обтекателем ВОВ и главным редуктором (на фиг. 1 не показано). Большие стороны 13 плоских боковых воздухозаборников фюзеляжа 1 выполнены, открывая/закрывая их вход, отклоняемыми вверх/вниз к пластинчатым отсекателям 14. Над КАС 2 и КАС 4 с их стреловидностью χ=±45° на колонках валов 15 установлены широкохордовые передний 16 и задний 17 ДНВ с трапециевидными лопастями, имеющими направление их вращения при виде сверху против и по часовой стрелки и закругленные в плане законцовки 18, работают с изменением общего и циклического их шага при компенсации реактивного крутящего момента на режимах зависания, выполнены с жестким креплением и автоматом перекоса их лопастей ДНВ 16-17, но и возможность фиксации переднего и заднего ЛКАС с зеркальной к соответствующему КАС их стреловидностью χ=±45°.
Комбинированная СУ КГтД имеет передние и задние управляемые створки 19 гондолы 12 для дополнительного в нее подвода воздуха, но и внешний и внутренний контуры с ВОВ в ПРС-R1 и ССТ, выполнен с передним выводом вала для отбора мощности от ССТ и ее передачи на промежуточный и главный редукторы (на фиг. 1 не показаны), который перераспределяет 100% или 72% и 100% от взлетной мощности СУ соответственно при выполнении ВВП и зависания между ДНВ 16-17 в ДПНС-Х2 или при транс- или сверхзвуковом крейсерском полете на ВОВ в ПРС-R1 от ССТ, имеющих на конце гондолы 12 плоские реактивные сопла 20 со скошенными в плане задними кромками, размещенными параллельно V-образной в плане задней кромке 10 профилированной кормовой части 9 фюзеляжа 1. Стреловидные кили 6, отклоненные вниз и наружу от плоскости симметрии, имеют спереди и сзади на концах их законцовок соответствующие пары ИК-излучателей 22 с ИК-приемниками 23. Трехопорное убирающееся колесное шасси, имеющее переднюю 24 и главные боковые опоры 25.
Управление ОПСВ обеспечивается циклическим и общим изменением шага ДНВ 16-17 и отклонением элевонов 5 и рулевыми поверхностями 7. При крейсерском скоростном или высокоскоростном полете в конфигурации реактивных автожира или самолета подъемная сила создается авторотирующими ДНВ 16-17 с КАС 2, 4 или КАС 2, 4 с зафиксированными ЛКАС 16-17 ДНВ (см. фиг. 1б), маршевая реактивная тяга - ВОВ в ПРС-R1 через реактивные плоские сопла 20, на режиме перехода - КАС 2, 4 с ДНВ 16-17. После создания подъемной тяги ДНВ 16-17 в ДПНС-Х2 обеспечиваются режимы ВВП и зависания или КВП при создании плоскими соплами 20 реактивной тяги (см. рис. 1a). При выполнении ВВП и зависания изменение балансировки по тангажу и курсу, крену обеспечивается дифференциальным изменением тяги двух ДНВ 16-17 и изменением соответствующего циклического шага посредством автомата перекоса продольных ДНВ 16-17 соответственно (см. рис. 1а). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ДНВ 16-17.
По мере разгона с ростом подъемной силы КАС 2, 4 подъемная сила ДНВ 16-17 уменьшается. При достижении скоростей полета 450…500 км/ч и для перехода на самолетный режим полета ДНВ 16-17 синхронно останавливается так, что его ЛКАС 16-17 размещены при виде сверху наружу от оси симметрии и снабжены автоматическими узлами фиксирования так, что их ЛКАС 16-17 ДНВ зафиксированы с противоположной стреловидностью по передним их кромкам, образуя стреловидность χ=±45° (см. фиг. 1б). При создании реактивной тяги плоскими соплами 20 производится сверхзвуковой крейсерский полет ОПСВ на высоте полета 11 км, при котором путевое управление обеспечивается асинхронным отклонением рулей 7 на килях 6. Продольное и поперечное управление осуществляется синхронным и дифференциальным отклонением соответственно рулей 7 на килях 6 и внешних элевонов 5 на КАС 4.
Таким образом, сверхзвуковые ОПСВ и ДПСВ с КГтД и двумя ССТ, имеющие для создания вертикальной тяги ДНВ в ДПНС-Х2 и горизонтальной тяги ВОВ в ПРС-R1, представляют собой конвертоплан с работающими ДНВ или зафиксированными их ЛКАС, изменяющий свою полетную конфигурацию только благодаря изменению условий работы ДНВ так, что набегающий поток при вертолетном и самолетном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей ДНВ и зафиксированных ЛКАС, когда при вращении переднего/заднего ДНВ в ДПНС-Х2 отступающие их левая/правая лопасти с задней и передней их кромками превращаются в прямом полете после фиксации соответственно в переднюю и заднюю кромки левой/правой консолей неподвижных их ЛКАС. Что позволит тандемным крыльям ХОС с углом атаки α=6° и стреловидностью χ=±45° в отличие от эллиптического их профиля с тупой задней кромкой, создающей большее сопротивление профиля, чем острая задняя кромка чечевицеобразного профиля, уменьшить вес планера палубных ОПСВ и ДПСВ, выполненных по малозаметной технологии с радиопоглощающими материалами, увеличить взлетный вес на 17%, либо дальность полета на 29% при сохранении взлетного веса в составе авиационной группы двух ДПСВ, особенно, с головным ОПСВ. Конвертируемая компоновка ОПСВ и ДПСВ с конструкцией Х-крыла, создающей высокие переменные аэродинамические нагрузки при переходе с вращательного полета на неподвижный, обеспечивает парой тандемных КАС увеличение показателей аэродинамических и структурных преимуществ тандемных крыльев ХОС, повышающих продольную устойчивость.
Авиационная группа в составе АРУС, включающая однотипные ОПСВ и ДПСВ (см. табл. 1 тип 1.2), используемые поочередно с вертолетной площадки АНК, несущие в отсеках вооружения ОПСВ/ДПСВ по 3/4 штук АПР-3МЭ или ПКР типа X-35УЭ. Головной ОПСВ, который полностью оцифрован с использованием новейших технологий, включая и совместное использование пилотируемых и беспилотных летательных аппаратов, так называемое manned and unmanned teaming (MUM-T), которое позволяет пилотам ОПСВ в АРУС контролировать траекторию полета группы ведомых ДПСВ и их боевые нагрузки, обеспечивающие противолодочную или противокорабельную и/или противовоздушную оборону. Четвертый уровень MUM-T позволяет пилотам ОПСВ не только получать реальные сенсорные изображения с авиагруппы ведомых ДПСВ и управлять сенсорными и оружейными нагрузками, но и их навигацией и глобальным позиционированием при следящем совместном их полете.
Несомненно, широкое применение в комбинированной СУ КГтД с ВОВ, в конструкции которого, используя турбины от ТРДД типа Д-ЗОКУ, позволит освоить семейство сверхзвуковых ОПСВ и ДПСВ (см. табл. 1) для блочно-модульных АРУС, базируемых на АНК и палубном ИН, повышающих их боевую устойчивость и безопасность, создающих буферную авиазону между ПВО НК-цели и АНК или его ИН.
Источники информации:
1. Адрес в интернете: https://ru.wikipedia.org/wiki/NASA_AD-l
2. Адрес в интернете: http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml
3. Адрес в интернете: http://www.airwar.ru/weapon/guns/yakbl2-7.html
4. Адрес в интернете: https://www.nasha-strana.info/archives/25587.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2733678C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
Изобретение относится к средствам военной блочно-модульной техники. Авиационно-ракетная ударная система (АРУС) с беспилотным летательным аппаратом (БЛА), имеющим фюзеляж с комплексом вооружения на пусковых устройствах (ПУ), крыло с органами управления, двигатель силовой установки (СУ), бортовую систему управления (БСУ), обеспечивающую телемеханическое управление с командного пункта (КП) корабля-носителя. АРУС включает опционально и дистанционно пилотируемые самолеты-вертолеты, имеющие крылья асимметричной стреловидности (КАС), двухлопастные несущие винты (ДНВ) и в кормовой гондоле комбинированный двигатель со свободными силовыми турбинами, приводящими два продольных ДНВ и/или в кольцевом обтекателе выносной вентилятор, направленную горизонтально назад с работающими/авторотирующими ДНВ или зеркально зафиксированными их лопастями-крыльями асимметричной стреловидности (ЛКАС) соответствующему КАС в конфигурации палубных реактивных винтокрыла/автожира или самолета с тандемными крыльями Х-образной стреловидности и управляемыми ракетами. Достигается увеличение весовой отдачи и боевой нагрузки, повышение скорости и дальности полета, увеличение вероятности поражения надводной, подводной и воздушной цели, расположенной на большой дальности, и возможность ее атаки после продолжительного полет в режиме зависания, возврата на вертолетную площадку АНК для повторного использования. 4 з.п. ф-лы, 1 табл., 3 ил.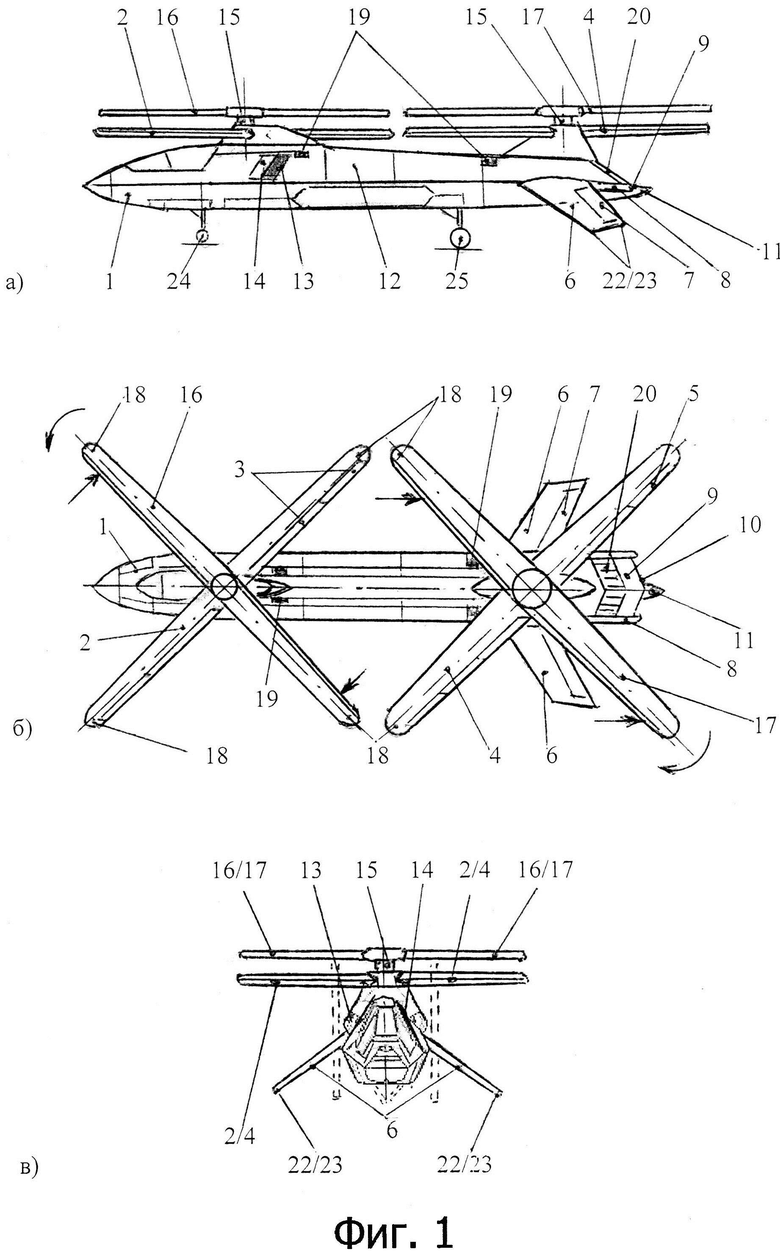
1. Авиационно-ракетная ударная система с беспилотным летательным аппаратом (БЛА), имеющим фюзеляж, комплекс вооружения на пусковых устройствах (ПУ), крыло с органами управления, двигатель силовой установки (СУ), бортовую систему управления (БСУ), обеспечивающую телемеханическое управление с командного пункта (КП) корабля-носителя, отличающаяся тем, что она имеет группу аппаратов вертикального взлета и посадки корабельного базирования, включающую более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ), используемую по меньшей мере с одной вертолетной площадки авианесущего корабля (АНК), причем каждый ОПСВ и ДПСВ в конвертируемой компоновке тандем с высокорасположенными крыльями асимметричной стреловидности (КАС) снабжен в двухвинтовой продольно-несущей схеме (ДПНС) на передней и задней колонках валов двумя двухлопастными несущими винтами (ДНВ), смонтированными над соответствующим КАС, создающими в ДПНС-Х2 вертикальную тягу только при вертикальном и коротком взлете/посадке (ВВП и КВП) или на переходных режимах полета, и по меньшей мере одним комбинированным газотурбинным двигателем (КГтД), выполненным в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с по меньшей мере одним выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере одной свободной силовой турбиной (ССТ), снабженной передним выводом вала для отбора мощности и ее передачи на главный редуктор, перераспределяющий взлетную мощность СУ при выполнении ВВП, зависания или высокоскоростном крейсерском полете соответственно между широкохордовыми ДНВ в ДПНС-Х2 и/или, например, на один ВОВ, имеющий лопатки с большой его круткой и работающий по тянущей схеме для создания в пропульсивно-реактивной системе (ПРС-R1) маршевой тяги, направленной горизонтально и параллельно оси симметрии на переходных режимах полета, при выполнении ВВП и КВП или горизонтальном поступательном полете, но и имеющим переднее и заднее трапециевидные КАС, выполненные равновеликими с двумя лопастями соответствующих ДНВ, смонтированные на соответствующих верхних пилонах или обтекателях фюзеляжа, обеспечивающих размещение левых и правых или правых и левых консолей КАС с образованием соответственно разнонаправленной стреловидности χ=-45° и χ=+45° при разновеликой площади переднего и заднего КАС, площадь последнего большего КАС составляет 62,5% от общей площади двух КАС, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения короткого или вертикального взлета соответственно с винтокрыла или вертолета с ДПНС-Х2 в соответствующие, например, реактивные скоростной автожир для барражирующего полета или самолет бипланной схемы тандем при максимальном или нормальном взлетном весе соответственно с передним и задним трапециевидными ДНВ, работающими на режимах их авторотации или в качестве верхних соответствующих лопастей-крыльев асимметричной стреловидности (ЛКАС), снабженных возможностью синхронного фиксирования ЛКАС с одновременной как организацией при виде сверху асимметричных несущих поверхностей двух ДНВ, так и трансформацией ДНВ, осуществляемой на переходных режимах полета последовательно, когда после взлетного режима, набора высоты и выполнения разгонного полета лопасти переднего и заднего ДНВ одновременно остановлены так, что их лопасти размещены в плане в противоположные стороны от оси симметрии при одновременном фиксировании двух их ЛКАС, правые и левые или левые и правые лопасти ДНВ которых имеют соответственно разнонаправленную стреловидность с углом χ=-45° и χ=+45° по передним кромкам их ЛКАС, организуют для крейсерских высокоскоростных режимов полета в самолетной конфигурации зеркально-асимметричные ЛКАС соответствующему КАС, имеющему наравне с консолями ЛКАС закругленные или треугольные в плане законцовки, и образуют совместно с разнонаправленными консолями переднего и заднего КАС соответствующие Х-образные стреловидности (ХОС) при соответствующем угле стреловидности χ=±45° ЛКАС, но и преобразуют большое и умеренное удлинение переднего и заднего ЛКАС с λ=5,73-8,14 и λ=3,44-4,88 до малого удлинения их передней и задней системы бипланных крыльев ХОС с λ=2,86-4,07 и λ=1,72-2,44 в полетной конфигурации самолета с тандемными крыльями ХОС, но и обратно.
2. Система по п. 1, отличающаяся тем, что в упомянутых ОПСВ и ДПСВ набегающий поток при самолетном и вертолетном режимах полета встречают одновременно передние кромки зафиксированных ЛКАС и наступающих лопастей переднего и заднего ДНВ, которые, вращаясь, например, соответственно против и по часовой стрелки в ДПНС-Х2, имеют отступающие их левую и правую лопасти с передними и задними их кромками, превращающимися в прямом полете, изменяя после установки на противоположный угол их атаки, в задние и передние кромки зафиксированных консолей неподвижного переднего и заднего ЛКАС/КАС, имеющих с противолежащими их лопастями/консолями равновеликий или меньший угол атаки с адаптивной зависимостью, исключающей несимметричный срыв потока вдоль размаха их ЛКАС/КАС, а лопасти/консоли каждого их ЛКАС/КАС имеют симметричный профиль, который в диапазоне параметров угла их атаки α=3°…α=8° и относительной их толщины  обеспечивают, увеличивая скорость потока между задними вихрями через верхнюю поверхность чечевицеобразного или ромбовидного профиля, имеющего закругленные углы на его меньшей диагонали, значительное снижении сопротивления за счет того, что нижний задний вихрь, смещаясь назад от задней кромки ЛКАС/КАС, уменьшит площадь поперечного сечения нижнего вихря при значительном увеличении потока над верхней поверхностью профиля в продолжение передней четверти поверхности, вызывая значительное более низкое распределение давления в этой части профиля, а их V-образные кили с рулевыми поверхностями, смонтированные при виде спереди по внешним бортам хвостовой балки вниз и наружу под углом 47° от плоскости симметрии, размещенные в плане между консолей задней ХОС, имеют спереди и сзади на концах их законцовок соответствующие пары инфракрасных (ИК) излучателей с ИК-приемниками, а длина их фюзеляжа в 1,4…1,5 раза больше диаметра ДНВ, что обеспечивает размещение их лопастей без выноса от концов фюзеляжа в походно-транспортной или полетно-транспортной конфигурации с предварительно сложенными вниз их ЛКАС наравне со сложенными вниз левыми и правыми как консолями КАС, размещенными соответственно спереди и сзади от оси вращения соответствующего ДНВ и параллельно плоскости симметрии, так и инвертированными V-образными килями, складываемыми к плоскости симметрии, размещаясь в соответствующих кормовых утонченностях фюзеляжа и вдоль боковых его сторон, высота которых с килями не превышает высоту фюзеляжа со стойками колес шасси в стояночной конфигурации, уменьшающей в 5,3-6,0 раза стояночную площадь от взлетной площади, а в их системе трансмиссии упомянутый КГтД размещен за центром масс в кормовой гондоле, в которой между ВОВ и одной или двумя ССТ смонтирован соосно с последними промежуточный редуктор, имеющий продольные по его оси как один или два входных вала от ССТ, так и продольные выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй продлен за ВОВ и передает через муфту сцепления крутящий момент на главный редуктор, имеющий продольные передний и задний входные валы с соответствующими угловыми редукторами, вертикальные колонки валов которых установлены в плане на продольной оси фюзеляжа, равноудалены в плане от центра масс и являются вертикальными соосными осями центрирующих узлов соответствующих КАС, но и имеют валы ДНВ, выходящие из них и размещенные с втулками ДНВ над КАС, причем на режимах ВВП и зависания упомянутых ОПСВ и ДПСВ при удельной нагрузке на мощность их СУ, составляющей ρN=2,05 кг/л.с, каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности ДПНС-Х2, составляющей ρВТ=1,68, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ДНВ соответственно как от двух работающих ССТ, так и от одной из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между двумя ДНВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяговооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,23 или ρВТ=1,11, обеспечит два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, при этом в каждой ССТ система УФБП содержит один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их фюзеляжа, и дисков вращения их ДНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения, компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы определить относительную позицию между их фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки, сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией, определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение, преобразовать скорость следящего устройства во входы управления полетом, а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, причем на режимах ВВП и зависания ОПСВ и ДПСВ упомянутые их ДНВ выполнены с жестким креплением их лопастей и автоматом прекоса, управляющим балансировкой по курсу, крену и тангажу посредством соответствующего изменения циклического и общего шага ДНВ, а их хвостовая балка на ее конце снабжена профилированной концевой частью, которая, образуя несущую поверхность, интегрирована по внешним ее бортам с килями хвостового оперения и имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно скошенным задним кромкам плоских сопел КГтД, имеющих термопоглощающее покрытие, уменьшающее ИК-заметность, при этом планер упомянутых ОПСВ и ДПСВ выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, а их упомянутый фюзеляж, имеющий скошенные их боковые стороны в соответствующих его носовой, центральной и кормовой частях, включая и гондолу КГтД с плоскими соплами, уменьшая эффективную площадь рассеивания, образуют при виде спереди пятигранное или шестигранное поперечное сечение, но и среднюю часть фюзеляжа граненной конфигурации с острой средней линией, непрерывно распространяющейся от носа до хвоста, снабжен снизу отсеками колесного шасси и ПУ вооружения в бомбоотсеках, каждый их которых имеет автоматические створки с пилообразными поперечными и продольными их сторонами, причем упомянутые ОПСВ и ДПСВ, несущие как авиационные управляемые ракеты воздух-воздух или воздух-поверхность, обеспечивают соответствующую борьбу с воздушной целью или надводным кораблем (НК-целью), так и, например, четырехствольный пулемет типа ЯкБЮ-12,7, смонтированный в обтекателе под носовой частью фюзеляжа и поражающей дозвуковые ударные БЛА и крылатые ракеты, при этом в ОПСВ и ДПСВ их БСУ имеет как радиолокационную станцию с передатчиком команд, так и оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при барражирующем полете самостоятельное нахождение цели, идентификацию ее и принятие подтвержденного решения от оператора АНК об уничтожении им выбранных, например, БЛА или крылатой ракеты, причем при противолодочной обороне в упомянутом ОПСВ используется опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на АНК для обработки в реальном масштабе времени при обнаружении подводной лодки (ПЛ), но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на АНК и его КП, при этом в процессе наведения одной или двух авиационных противолодочных ракет (АПР) залпа на цель автоматически определяется значение вводимого адаптивного угла упреждения, который при сближении с целью корректируется, причем введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом, обеспечивающим попадание одной или двумя АПР залпа преимущественно в прочный корпус ПЛ-цели, причем при противокорабельной обороне упомянутые ОПСВ и ДПСВ, использующие полетную конфигурацию реактивного самолета с зафиксированными ЛКАС ДНВ, несущие в бомбоотсеке соответствующие ПКР Х-35У или ПКР Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом радаром типа Н036 с головного ОПСВ обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны ДПСВ - станцию активных электронных помех, причем при достижении области, из которой будет поражена НК-цель, упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1560 км автоматически возвращается на АНК с вертикальной на его вертолетную площадку посадкой, при этом упомянутая БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми, например, двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного ОПСВ, а другой управляется вторым пилотом с головного ОПСВ, а затем наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурирована для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы определить относительную позицию между ведомым ДПСВ и головным ОПСВ, сравнить относительную позицию с выбранной относительной позицией, определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение, преобразовывать скорость следящего устройства во входы управления полетом, ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете.
обеспечивают, увеличивая скорость потока между задними вихрями через верхнюю поверхность чечевицеобразного или ромбовидного профиля, имеющего закругленные углы на его меньшей диагонали, значительное снижении сопротивления за счет того, что нижний задний вихрь, смещаясь назад от задней кромки ЛКАС/КАС, уменьшит площадь поперечного сечения нижнего вихря при значительном увеличении потока над верхней поверхностью профиля в продолжение передней четверти поверхности, вызывая значительное более низкое распределение давления в этой части профиля, а их V-образные кили с рулевыми поверхностями, смонтированные при виде спереди по внешним бортам хвостовой балки вниз и наружу под углом 47° от плоскости симметрии, размещенные в плане между консолей задней ХОС, имеют спереди и сзади на концах их законцовок соответствующие пары инфракрасных (ИК) излучателей с ИК-приемниками, а длина их фюзеляжа в 1,4…1,5 раза больше диаметра ДНВ, что обеспечивает размещение их лопастей без выноса от концов фюзеляжа в походно-транспортной или полетно-транспортной конфигурации с предварительно сложенными вниз их ЛКАС наравне со сложенными вниз левыми и правыми как консолями КАС, размещенными соответственно спереди и сзади от оси вращения соответствующего ДНВ и параллельно плоскости симметрии, так и инвертированными V-образными килями, складываемыми к плоскости симметрии, размещаясь в соответствующих кормовых утонченностях фюзеляжа и вдоль боковых его сторон, высота которых с килями не превышает высоту фюзеляжа со стойками колес шасси в стояночной конфигурации, уменьшающей в 5,3-6,0 раза стояночную площадь от взлетной площади, а в их системе трансмиссии упомянутый КГтД размещен за центром масс в кормовой гондоле, в которой между ВОВ и одной или двумя ССТ смонтирован соосно с последними промежуточный редуктор, имеющий продольные по его оси как один или два входных вала от ССТ, так и продольные выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй продлен за ВОВ и передает через муфту сцепления крутящий момент на главный редуктор, имеющий продольные передний и задний входные валы с соответствующими угловыми редукторами, вертикальные колонки валов которых установлены в плане на продольной оси фюзеляжа, равноудалены в плане от центра масс и являются вертикальными соосными осями центрирующих узлов соответствующих КАС, но и имеют валы ДНВ, выходящие из них и размещенные с втулками ДНВ над КАС, причем на режимах ВВП и зависания упомянутых ОПСВ и ДПСВ при удельной нагрузке на мощность их СУ, составляющей ρN=2,05 кг/л.с, каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности ДПНС-Х2, составляющей ρВТ=1,68, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ДНВ соответственно как от двух работающих ССТ, так и от одной из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между двумя ДНВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяговооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,23 или ρВТ=1,11, обеспечит два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, при этом в каждой ССТ система УФБП содержит один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их фюзеляжа, и дисков вращения их ДНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения, компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы определить относительную позицию между их фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки, сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией, определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение, преобразовать скорость следящего устройства во входы управления полетом, а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, причем на режимах ВВП и зависания ОПСВ и ДПСВ упомянутые их ДНВ выполнены с жестким креплением их лопастей и автоматом прекоса, управляющим балансировкой по курсу, крену и тангажу посредством соответствующего изменения циклического и общего шага ДНВ, а их хвостовая балка на ее конце снабжена профилированной концевой частью, которая, образуя несущую поверхность, интегрирована по внешним ее бортам с килями хвостового оперения и имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно скошенным задним кромкам плоских сопел КГтД, имеющих термопоглощающее покрытие, уменьшающее ИК-заметность, при этом планер упомянутых ОПСВ и ДПСВ выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, а их упомянутый фюзеляж, имеющий скошенные их боковые стороны в соответствующих его носовой, центральной и кормовой частях, включая и гондолу КГтД с плоскими соплами, уменьшая эффективную площадь рассеивания, образуют при виде спереди пятигранное или шестигранное поперечное сечение, но и среднюю часть фюзеляжа граненной конфигурации с острой средней линией, непрерывно распространяющейся от носа до хвоста, снабжен снизу отсеками колесного шасси и ПУ вооружения в бомбоотсеках, каждый их которых имеет автоматические створки с пилообразными поперечными и продольными их сторонами, причем упомянутые ОПСВ и ДПСВ, несущие как авиационные управляемые ракеты воздух-воздух или воздух-поверхность, обеспечивают соответствующую борьбу с воздушной целью или надводным кораблем (НК-целью), так и, например, четырехствольный пулемет типа ЯкБЮ-12,7, смонтированный в обтекателе под носовой частью фюзеляжа и поражающей дозвуковые ударные БЛА и крылатые ракеты, при этом в ОПСВ и ДПСВ их БСУ имеет как радиолокационную станцию с передатчиком команд, так и оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при барражирующем полете самостоятельное нахождение цели, идентификацию ее и принятие подтвержденного решения от оператора АНК об уничтожении им выбранных, например, БЛА или крылатой ракеты, причем при противолодочной обороне в упомянутом ОПСВ используется опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на АНК для обработки в реальном масштабе времени при обнаружении подводной лодки (ПЛ), но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на АНК и его КП, при этом в процессе наведения одной или двух авиационных противолодочных ракет (АПР) залпа на цель автоматически определяется значение вводимого адаптивного угла упреждения, который при сближении с целью корректируется, причем введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом, обеспечивающим попадание одной или двумя АПР залпа преимущественно в прочный корпус ПЛ-цели, причем при противокорабельной обороне упомянутые ОПСВ и ДПСВ, использующие полетную конфигурацию реактивного самолета с зафиксированными ЛКАС ДНВ, несущие в бомбоотсеке соответствующие ПКР Х-35У или ПКР Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом радаром типа Н036 с головного ОПСВ обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны ДПСВ - станцию активных электронных помех, причем при достижении области, из которой будет поражена НК-цель, упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1560 км автоматически возвращается на АНК с вертикальной на его вертолетную площадку посадкой, при этом упомянутая БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми, например, двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного ОПСВ, а другой управляется вторым пилотом с головного ОПСВ, а затем наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурирована для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы определить относительную позицию между ведомым ДПСВ и головным ОПСВ, сравнить относительную позицию с выбранной относительной позицией, определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение, преобразовывать скорость следящего устройства во входы управления полетом, ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете.
3. Система по п. 2, отличающаяся тем, что в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с один или несколькими датчиками включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом приема-передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей упомянутый следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование упомянутого следящего полета ведомым ДПСВ через компьютер управления полетом.
4. Система по любому из пп. 1 или 2, отличающаяся тем, что для экономичного скоростного горизонтального полета упомянутых ОПСВ и ДПСВ в их авторотирующей системе, включающей в упомянутом главном редукторе ДНВ автоматическую коробку передач (АКП), имеющую для привода ДНВ выходные упомянутые валы, которые создают по два потока: первый - взлетный с выдачей соответствующей мощности от КГтД и созданием подъемной тяги от ДНВ, второй - крейсерский в конфигурации автожира с приемом мощности от авторотации ДНВ на ее соответствующую ступень, отключающую ДНВ от привода ССТ упомянутого КГтД, приводящую обратимый электромотор-генератор (ОЭМГ), заряжающий аккумуляторы, и управляющую синхронным снижением и скорости его вращения, например, до 150 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ДНВ, обеспечивающих долю увеличения в 2/5-1/2 раза требуемой подъемной силы их упомянутых КАС, но и плоскостью вращения лопастей ДНВ, которая почти выровнена с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ДНВ на 12-15% от общего сопротивления профиля лопастей ДНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых их КАС с уменьшенной их геометрией, составляющей 3/5-1/2 от габаритов крыла аналогичного реактивного самолета, при этом ОЭМГ, питаемый от аккумуляторов, обеспечивает при воздушном базировании упомянутых ДПСВ на истребителе-носителе (ИН) как запуск ССТ в упомянутом КГтД после раскладывания упомянутых ЛКАС ДНВ из полетно-транспортной в полетную конфигурацию посредством привода АКП упомянутого главного редуктора, отключенного от системы трансмиссии, обеспечивающего следящим приводом АКП требуемое число оборотов ОЭМГ, которое создает требуемый поворот вала каждого ДНВ в горизонтальной плоскости с обеспечением установки и фиксации требуемого угла стреловидности ЛКАС их ДНВ с последующим раскладыванием упомянутых консолей КАС и килей хвостового оперения при соответствующем фиксированном размещении ЛКАС ДНВ, причем при воздушном базировании ДПСВ на палубном ИН, перемещающим на подвесной консоли подфюзеляжного или подкрыльных ПУ, например, один или два ДПСВ с их боекомплектом, используемым и с подвешенного состояния на ИН, и плоскими их боковыми воздухозаборниками, имеющими на их входе сбрасываемые обтекатели или отклоняемые большие их стороны, которые, перемещаясь вверх/вниз от/к их пластинчатым отсекателям, соответственно открывают/закрывают их вход для уменьшения сопротивления.
5. Система по любому из пп. 1 или 2, отличающаяся тем, что для горизонтального полета на высоте 11 км ОПСВ и ДПСВ, достигая маршевой тяговооруженности первого уровня - 0,234 и второго - 0,307, используется соответствующая мощность их СУ 36% и 54% от работающего КГтД на привод их ВОВ в конфигурации упомянутых реактивных крылатого автожира и самолета с ПРС-R1, при этом на высоте полета 11 км в конфигурации реактивного самолета, упомянутые консоли ХОС которого, имея по передним их кромкам стреловидность с углом χ=±45°, обеспечивает при маршевой тяговооруженности второго уровня 0,307 скорость полета 0,79 Маха (М), причем упомянутые консоли ХОС при угле их стреловидности χ=±45°, имея максимальную тяговооруженность 0,374 и 0,46, используется 72% и 100% мощности комбинированной СУ, достигается скорость горизонтального полета М=0,9 и М=1,02 в конфигурации соответственно транс- и сверхзвукового самолета, при этом в ОПСВ и ДПСВ упомянутый их КГтД снабжен перед концом его реактивного сопла форсажной камерой, используемой на взлетных режимах или горизонтальном полете с передними за ВОВ и задними перед форсажной камерой открытыми управляемыми створками кормовой гондолы для дополнительного в нее подвода воздуха, позволит с их перегрузом 15% повысить маршевую тяговоуроженность с 0,46 до 0,69 и скорость с М=0,96 до М=1,02, но и изменить на высоте полета 11 км конфигурацию с транс- до сверхзвукового самолета соответственно.
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ И КОМПЛЕКС ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ | 2007 |
|
RU2371668C2 |
| Конвертоплан | 2018 |
|
RU2682756C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| RU 183800 U1, 02.10.2018 | |||
| US 6655631 B2, 02.12.2003. | |||

