Изобретение относится к средствам военной техники и может быть применено в конструкции палубных авиационных ударных комплексов, использующих опционально и дистанционно пилотируемые самолеты-вертолеты интегральной компоновки, включающей летающее крыло дупланной схемы, имеющее разновеликие первое и второе стреловидные крылья (ПСК и ВСК) и на концах ПСК два однолопастных несущих винта (ОНВ) с противовесами и две крыльевые гондолы, объединяющие ПСК и ВСК, имеющие свободные силовые турбины, приводящие поперечные ОНВ и в кольцевых обтекателях выносные вентиляторы, создающие при вертикальном и коротком взлете/посадке (ВВП и КВП) пропульсивно-реактивную тягу, направленную горизонтально назад с работающими/авторотирующими ОНВ или зафиксированными их лопастями-крыльями от ПСК наружу при горизонтальном полете со всеракурсным изменением вектора тяги ССТ в конфигурации реактивных винтокрыла/ автожира или трансзвукового самолета, имеющего в бомбоотсеке на пусковых устройствах авиационные управляемые ракеты и трансформируемого после его посадки на корабельную площадку посредством фиксированного размещения лопастей двух ОНВ вдоль консолей ПСК и складывания их противовесов и внешних секций ВСК в походно-заряжающую конфигурацию для его перевозки в ангаре на ложементе заправляющей топливом и заряжающей боекомплектом станции надводно-подводного корабля (НПК).
Известен совместный проект британских компаний "BAE Systems" и "Vickers Shipbuilding and Engineering" по созданию подводного авианосца с палубной системой "Skyhook" [1], включающей подлодку типа "Vanguard", более чем один самолет вертикального взлета-посадки (СВВП) и более чем один манипулятор с захватами для захвата СВВП, подлетевшего и зависшего под захватами манипулятора, и переноса его на палубу с последующим перемещением СВВП в ангар авианесущей подлодки.
Признаки, совпадающие - наличие подводного авианосца с палубной ударной авиационной системой, включающей манипулятор с захватами для переноса реактивного СВВП на палубу подлодки с последующим его перемещением в ангар на транспортно-фиксирующем устройстве и из ангара обратно. Проект системы "Skyhook" выглядел следующим образом: на подлодке по ее бортам в кормовых обтекателях размещались два механических манипулятора с захватами, садившийся СВВП "Харриер" подлетал к подлодке, переводил сопла в вертикальное положение и плавно зависал рядом с бортом, после чего манипулятор с несколькими захватами подцеплял СВВП за специальные упоры на фюзеляже. Датчики синхронизировали движения манипулятора с работой его захвата и СВВП. После захвата СВВП манипулятор автоматически переносил на палубу подлодки и укладывал его на транспортное устройство для перемещения в ангар подлодки и обратно заправленного и заряженного СВВП.
Причины, препятствующие поставленной задаче: первая - это то, что наличие на верхней части фюзеляжа вертикального оперения затрудняет после перевода сопел в вертикальное положение выполнение зависания СВВП рядом с бортом подлодки и под захватами манипулятора, а в случае отказа работы датчиков синхронизации их движения и его перелета вперед от захватов манипулятора, что не исключает последующего их контакта с возможным разрушением самого вертикального оперения и неизбежного крушения СВВП. Вторая - это то, что реактивный СВВП с двумя парами поворотных сопел по его бортам при выполнении его зависания рядом с бортом подлодки и под захватами манипулятора необходимые изменения балансировки по тангажу, крену и рысканью осуществляются синфазным и дифференциальным соответствующим их отклонением в двух вертикальных продольных плоскостях, что неизбежно усложняет процесс стыковки с захватами манипулятора, особенно, при кренах подлодки до 25° и с расположением манипуляторов с внешних ее бортов.
Известен разведывательно-ударный беспилотный самолет мод. "Taranis" [2] британской компании "BAE Systems" выполнен по схеме летающее крыло с внутренними отсеками вооружения и без вертикального оперения, имеет один ТРДД с воздухозаборником, размещенным на его верхней части, и трехопорное убирающееся колесное шасси. Для трансзвукового полета "Taranis" его ТРДД Rolls-Royce Adour имеет реактивную тягу 4485 кгс, что обеспечивает при тяговооруженности 0,64 на высоте полета 11,5 км скорость 1060 км/ч. Взаимодействие аэродинамических, структурных и управляющих реакций - является ахиллесовой пятой "Taranis" в схеме летающее крыло. Для обеспечения контроля его управляемости, особенно, в направлении всех трех осей управления - тангаж, крен и рыскание, имеются шесть интегрированных поверхностей управления полетом на задней его кромке. Эффект интегрированных поверхностей меняется в зависимости от оси управления, особенно, при изменении балансировки по рысканию, которое зависит от угла относительного встречного потока при соответствующем отклонении внешних интерцепторов, вызывающих постоянные управляющие реакции компьютера управления, что в отсутствии всеракурсного отклоняемого сопла ТРДД усложняет управляемость и не обеспечивает стабильность.
Наиболее близким к предлагаемому изобретению является противолодочный корабль (ПЛК), вооруженный палубным авиационным ударным комплексом (ПАУК) "Icara" [3] (Великобритания), содержащим беспилотный летательный аппарат (БЛА), имеющий фюзеляж с отделяемой управляемой ракетой, среднерасположенное крыло с органами его управления, двигатель, бортовую систему управления (БСУ), обеспечивающую телемеханическое управление (ТМУ) с командного пункта (КП) ПЛК.
Признаки, совпадающие - габариты БЛА без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м. Боевая часть: самонаводящаяся противолодочная малогабаритная торпеда (МГТ) Мк.44. Летные характеристики: максимальная и минимальная высота полета соответственно 300 м и 15-20 м. Ввиду значительного веса БЛА с торпедой Mk.44 составляющего 1480 кг (при массе 13% целевой нагрузки - торпеды 196 кг, ее длине 2,57 м и диаметре 324 мм) и малых дальности 24 км и скорости полета 140-240 м/с, а боевой части (торпеды - 30 узлов и дальность хода 5 км).
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели сбрасываемую торпеду. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем передавал их через радиокомандную систему управления на БЛА в полете. По прибытии БЛА в район нахождения ПЛ-цели торпеда (самонаводящаяся МГТ Мк.44), полу утопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск ПЛ-цели. После чего БЛА продолжает полет с работающей СУ, уводя ее от места приводнения самонаводящейся МГТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном корабле с ПАУК модели "Icara" (Великобритания) увеличения боевой нагрузки и весовой отдачи, повышения скорости и дальности полета, увеличения вероятности поражения подводной и надводной цели, расположенной на большой дальности, но и возможности ее атаки после продолжительного полета в режиме зависания, возврата на вертолетную площадку надводно-подводного корабля для повторного использования.
Отличительными признаками предлагаемого изобретения от указанного выше известного ПАУК "Icara", наиболее близкого к нему, являются наличие того, что малоэкипажный НПК (МНПК) с авиагруппой аппаратов вертикального взлета и посадки в ПАУК, включающем, по меньшей мере, один опционально пилотируемый самолет-вертолет (ОПСВ) с, по меньшей мере, одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ), которые используются, по меньшей мере, с одной вертолетной площадки МНПК, причем каждый ОПСВ и ДПСВ выполнен без вертикального оперения по интегральной компоновке летающее крыло дупланной схемы, которое имеет первое и второе стреловидные крылья (ПСК и ВСК), разнесенные между собой в продольном направлении, и снабжен в двухвинтовой поперечно-несущей схеме (ДПНС) однолопастными несущими винтами (ОНВ) с их противовесами, смонтированными на профилированных надкрыльных пилонах ПСК и крыльевых гондол, конструктивно объединяющих ПСК с ВСК, создающими в ДПНС-Х2 вертикальную тягу только при вертикальном и коротком взлете/посадке (ВВП и КВП) или на переходных режимах полета, но и снабжен не менее чем парой комбинированных газотурбинных двигателей (КГтД), левый и правый из которых установлен в соответствующей крыльевой гондоле и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и, по меньшей мере, одной свободной силовой турбиной (ССТ), имеющей круглое сопло со всеракурсным управлением вектора тяги (ВУВТ), передающей взлетную мощность комбинированной силовой установки (СУ) посредством системы трансмиссии на соответствующий ОНВ в симметрично-сбалансированной ДПНС-Х2 и/или ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, создает в пропульсивно-реактивной системе (ПРС-R2) синхронную реактивную тягу при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и оснащен в дупланной схеме разновеликими ПСК и ВСК, имеющими размах соответственно в 1,04 и 1,965 раза больше диметра (D) ОНВ при угле прямой стреловидности по передней кромке ВСК, например, χ=+37° или χ=+43°, который равновелик углу стреловидности по передней кромке ПСК, имеющего передние наплывы, образующие в плане V-образную конфигурацию с большим ее отличным углом стреловидности от ПСК, задняя кромка которого параллельно размещена в плане задней кромке внешних секций ВСК, размах внутренних секций последнего равновелик размаху ПСК, размещенными в плане при угле обратной стреловидности по задней кромке внутренних секций ВСК, образующих профилированную кормовую его часть с V-образной в плане задней кромкой, и интегрированными с крыльевыми гондолами, смонтированными большей их частью под или над ПСК и ВСК, повышающими их жесткость, противодействуя вредному влиянию дивергенции, особенно, внешних секций ВСК, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого или вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующие реактивные скоростной крылатый автожир или самолет с поперечными ОНВ, работающими на режимах их авторотации или в качестве несущих их широкохордовых лопастей-крыльев (ШЛК), образованных при фиксации ОНВ с их противовесами или трансформации их противовесов, осуществляемой на переходных режимах полета последовательно, когда после вертикального/короткого взлета, набора высоты и выполнения разгонного полета оба ОНВ одновременно предварительно остановлены так, что их противовесы и лопасти зафиксированы в плане соответственно от конца ПСК во внутрь к и наружу от оси симметрии или при остановленных ШЛК их профилированные противовесы снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 127° или 133° в горизонтальной плоскости и их размещения назад по полету и параллельно оси симметрии при фиксировании с соответствующей стреловидностью по передней кромке ШЛК левого и правого ОНВ, которые образуют с ПСК и ВСК равновеликую по передней кромке их стреловидность и организуют соответственно синхронно-симметричные несущие поверхности их ШЛК в полетной конфигурации реактивного самолета с ПРС-R2 и системой ступенчатых разноуровневых крыльев (ССРК), но и обратно.
Кроме того, в системе трансмиссии упомянутых ОПСВ и ДПСВ каждый их КГтД, например, с одной ССТ, имеющей для отбора взлетной ее мощности передний вывод вала, смонтированный по продольной оси его гондолы, в которой между упомянутыми ВОВ и ССТ смонтирован соосно с последними Т-образный как при виде сверху, так и сбоку промежуточный редуктор, имеющий продольный входной вал от ССТ и выходные как передний продольный, так и поперечный с боку, но и верхний валы, первый из которых передает мощность через муфту сцепления на ВОВ, кольцевой обтекатель которого имеет воздухозаборник регулируемый с коническим центральным телом, второй синхронизирующий, проложенный в ПСК, вращательно связывает ССТ двух КГтД, а третий передает через муфту сцепления крутящий момент на входной вал соответствующего консольного редуктора ОНВ, размещенного в надкрыльном пилоне, имеет выходной вал, который размещен в плане на поперечной оси, проходящей через центра масс, и равноудален от центра масс, но и отклонен назад по полету на угол (α), который при виде сбоку равен 1/2 или равновелик величине угла атаки (α) соответственно ПСК или ВСК, а набегающий поток при вертикальном и горизонтальном их режимах полета встречают одновременно соответственно передние кромки наступающих лопастей ОНВ в упомянутой ДПНС-Х2 и зафиксированные их упомянутые ШЛК ОНВ, выполняющие роль верхних с ярусным размещением внешних секций ПСК в упомянутой ССРК, преобразующей умеренное удлинения ПСК и большое ВСК соответственно с λ=5,34…5,39 и λ=7,9…8,0 до удлинения ССРК с λ=4,88…4,96, а межгондольные секции упомянутых их ПСК и ВСК снабжены соответственно предкрылками и внутренними закрылками, используемыми на взлетно-посадочных или переходных режимах полета ОПСВ и ДПСВ, а упомянутые круглые сопла с ВУВТ их ССТ снабжены возможностью при синфазном и дифференциальном их синхронном отклонении обоих вертикально вверх или вниз, обоих горизонтально влево или вправо и вертикально одного вверх, а другого вниз изменять соответственно балансировку по тангажу, курсу и крену при горизонтальном поступательном полете ОПСВ и ДПСВ, при этом упомянутые ОПСВ и ДПСВ на их режимах ВВП и зависания в упомянутой ДПНС-Х2 левый и правый ОНВ, имеющие противоположное направление их вращения соответственно по часовой и против часовой стрелки, выполнены с жестким креплением их лопастей и автоматом их перекоса, обеспечивающие изменение балансировки по тангажу, курсу и крену, которое создается изменением соответствующего циклического шага и дифференциальным изменением тяги посредством общего шага упомянутых ОНВ соответственно, а их внешние секции упомянутого ВСК имеют на их законцовках спереди и сзади на их концах соответствующие инфракрасные (ИК) излучатели и тепловые камеры, причем после вертикальной посадки на вертолетную площадку МНПК упомянутых ОПСВ и ДПСВ, конвертируемая система несущих поверхностей каждого из них имеет возможность как предварительной остановки их лопастей ОНВ вдоль консолей ПСК и размещения их законцовками к оси симметрии с последующим складыванием упомянутых их противовесов при их расположении вперед по полету и параллельно оси симметрии, так и синхронного складывания вверх внешних секций ВСК, размещающихся над его внешними секциями, но и их транспортирования в ангаре МНПК при уменьшении в 1,8…2,0 раза площади походной их конфигурации от взлетной их площади, а их упомянутое ВСК, имеющее при соотношении его площади 56,6%…57,1% от суммы площадей всех несущих поверхностей, включая площади упомянутых ПСК и ВСК с их несущим фюзеляжем и ШЛК двух ОНВ, снабжено от задней его кромки вдоль оси симметрии кормовым обтекателем, имеющим на его конце отсек с выдвижной штангой магнитометра и в нижнем его отсеке с открываемыми створками опускаемую лебедкой и буксируемую на тросе под водой антенну гидроакустической станции при барражирующем его полете, при этом упомянутые ОПСВ и ДПСВ, несущие авиационные противолодочные и противокорабельные ракеты (АПР и ПКР), обеспечивают соответствующую борьбу с подводной лодкой (ПЛ) и надводным кораблем (НК), причем при противолодочной обороне в упомянутых ОПСВ и ДПСВ используется опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на МНПК для обработки в реальном масштабе времени или высокочувствительный магнитометр, имеющий магнито-чувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и связанным с БСУ в упомянутых ОПСВ и ДПСВ, предусматривающей выдачу команд на включение в расчетной точке магнитометра и на управление после срабатывания магнитометра при обнаружении ПЛ-цели, но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на МНПК и его КП, при этом в упомянутых ОПСВ и ДПСВ упомянутая их БСУ имеет как радиоканал закрытой связи с МНПК, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при барражирующем полете самостоятельное нахождение ПЛ-цели, идентификации ее и принятие подтвержденного решения от оператора МНПК об уничтожении им выбранных, причем при противокорабельной обороне упомянутые ОПСВ и ДПСВ, использующие полетную конфигурацию упомянутого реактивного самолета с зафиксированными ШЛК ОНВ, несущие в бомбоотсеке соответствующие ПКР Х-35У или ПКР Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом радаром типа Н036 [4] с головного ОПСВ обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны - станцию активных электронных помех ДПСВ, причем при достижении области, из которой будет поражена НК-цель, упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1263 км автоматически возвращается на МНПК с вертикальной на его вертолетную площадку посадкой, при этом в упомянутых ОПСВ и ДПСВ планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, снабжен в нижней его части колесным шасси с убирающимися опорами в три отсека и пусковыми устройствами вооружения в бомбоотсеках, каждый их которых имеет по две автоматические створки с пилообразными поперечными их сторонами, а БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, размещенные бок о бок и срабатывающие на режимах ВВП и зависания поочередно, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми, например, двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного ОПСВ, а другой - управляется вторым пилотом с головного ОПСВ, а затем и наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете, причем главные стойки боковых колес, убираемых вперед по полету в надкрыльные обтекатели, интегрированные с внешними заостренными в поперечном сечении профилированными бортами межкрыльевой части несущего фюзеляжа, размещенные между ПСК и ВСК, имеют спереди и сверху радиопрозрачные их отсеки для установки в них антенн с каналом приема-передачи данных.
Кроме того, упомянутый МНПК имеет три прочных корпуса, расположенных горизонтально рядом так, что по бокам от среднего прочного корпуса смонтированы бок о бок еще два прочных корпуса, каждый из которых выполнен с меньшим диаметром, составляющим 55% от диаметра большего корпуса, но и способность погружаться с надводного положения в подводное и обратно, а также перемещаться под водой или по воде и в полупогруженном состоянии, последнее, наряду с радиопоглощающим покрытием удобообтекаемой центральной надстройки, имеющей наклоненные боковые панели, повышает малозаметность и предопределяет большую скрытность по сравнению с обычными надводным кораблем, при этом МНПК, подводная часть корпуса которого выполнена в виде туннельного типа с одной площадью ватерлинии, имеет по обе стороны от оси его симметрии совместно с боковыми его корпусами криволинейную форму нижней части его корпуса и снабжен двумя с открытым низом арочными продольными каналами, расположенными, образуя при виде спереди гребенчатую конфигурацию, параллельно оси симметрии, оснащен вдоль продольной оси каждого из каналов левым и правым прямоточными высокоэффективными водометными движителями насосного типа (ВДНТ) с поворотными эжекторными насадками на их выходе, обеспечивающими в конфигурации надводного корабля-тримарана с максимальной шириной кормовой части корпуса МНПК возможность его использования или при отсутствии воздушного зазора в районе верхней поверхности каждого арочного канала для исключения влияния ударных вертикальных нагрузок в этом районе каждого арочного канала при движении на встречном волнении, или при отсутствии большого волнения после продувки соответствующих балластных цистерн может перемещаться, увеличив скорость хода при той же мощности двигателей и имея геометрию с минимальным волновым сопротивлением посредством того, что наружные стенки арочных каналов в корпусе МНПК размещены параллельно его оси симметрии, образуя ширину палубы МНПК с наружными стенками боковых корпусов МНПК в районе кормовой оконечности практически параллельны оси симметрии и, следовательно, разрежение, которое возникает на корпусе в этом районе по бортам, при движении со скоростью, соответствующей FrL≅0,5, не будет влиять на сопротивление корпуса МНПК, особенно, с использованием передних подводных крыльев, причем в носовой части МНПК установлен малогабаритный гидроакустический комплекс МГК-13П "Припять-Пм" [5], а также четыре торпедных аппарата ПТА-53 калибра 533 миллиметра, размещенных в первом его отсеке с боезапасом из восьми торпед, причем прочная рубка, снабженная за ней и спереди комплексами соответственно двумя побортно зенитными АК-630М-2 "Дуэт" [6] и зенитным ракетно-артиллерийским 3М87 "Кортик" [7], убирающимися в походном подводном положении в контейнеры внутри легкого корпуса МНПК, оснащена вдоль продольной оси среднего корпуса в его продолжение кормовым авиационным прочным ангаром для размещения в нем на стационарных V-образных в плане ложементах, фиксирующих переднее и два задних колеса шасси, например, двух расположенных тандемом ДПСВ и ОПСВ, имеющим с его заднего торца автоматически раскрываемые соответствующие прочные люки, при этом прочный ангар снабжен выдвижной телескопической стойкой-ложементом, ложемент которой фиксируюет зажимами носовую подкрыльную часть однотипных ДПСВ и ОПСВ, имеет как возможность после расфиксации трех колес ДПСВ/ОПСВ на соответствующем V-образном в плане ложементе и поднятия стойки-ложемента с носовой его опорой переднего колеса, так и возможность при поднятой стойке-ложементе буксирования на задних колесах вдоль продольных направляющих, размещенных параллельно оси симметрии МНПК, вперед или назад при фиксированном размещения на стойке-ложементе ДПСВ/ОПСВ с зафиксированными его ОНВ и сложенными внешними секциями ВСК соответственно в заряжающую или заряженную походные конфигурации, причем средний прочный корпус на верхней его части за кормовым ангаром снабжен горизонтальной взлетно-посадочной площадкой (ГВПП), имеющей длину равновеликую длине фюзеляжа ДПСВ/ОПСВ с вращающимися ОНВ и систему принудительной сушки ее поверхности, но и в ее центре систему швартовки и принудительной вертикальной посадки (СШПВП) ДПСВ/ОПСВ на выдвинутую из ангара стойку-ложемент, при этом кормовая СШПВП, обеспечивающая возможность посадки ДПСВ/ОПСВ на стойку-ложемент МНПК при его кренах до 25° и представляющая собой при виде сзади П-образную раму с телескопическими боковыми стойками, размещенную перпендикулярно продольной оси среднего корпуса МНПК, выполнена с возможностью ее поворота в вертикальной плоскости вдоль последнего с горизонтального в вертикальное положение, снабжена сверху по краям и в середине ее поперечины ИК-приемниками, взаимодействующими с соответствующими ИК-излучателями ДПСВ/ОПСВ и автоматически корректирующими его маневры при посадке с использованием СШПВП, и цанговым узлом с пропущенным через него тросом с развитым эллипсовидным коушем, размещенным в центрирующем узле строго вдоль поперечины большей его осью и взаимодействующим с захватом отклоняемого вниз при посадке гака ДПСВ и ОПСВ, закрепленного под центром его масс, причем при вертикальной посадке ДПСВ/ОПСВ после зацепления гака и коуша троса его намотка/размотка производится сквозь палубный герметичный узел на ГВПП и обеспечивается лебедкой с барабаном и следящим его электроприводом, установленной под центром ГВПП в герметичном контейнере внутри легкого корпуса, с последующим разжимом цангового узла поперечины и одновременным втягиванием стоек П-образной рамы и ее поворота в горизонтальное положение так, что ее поперечина с цанговым узлом скользя по тросу опускается вниз и размещается в соответствующем углублении над центром ГВПП, после чего ДПСВ/ОПСВ осуществляет вертикальную посадку на стойку-ложемент с одновременной подмоткой троса, затем после фиксации зажимами носовой части ДПСВ/ОПСВ захват его гака отсоединяется от коуша троса и стойка-ложемент с закрепленным на нем передней стойки колеса ДПСВ/ОПСВ буксируется на задних колесах во внутрь ангара и соответственно фиксируются задние колеса и опускается с фиксацией переднее колесо на стационарные V-образные в плане ложементы на позиции заправки топливом и заряжания боекомплектом, например, АПР, размещенными в шестипозиционных транспортных накопителях (ШТН) револьверного типа, смонтированных по два ШТН с каждой стороны внутри каждого бокового корпуса, при этом вдоль продольной оси среднего корпуса между каждой парой ШТН, смонтированной по обе стороны от позиции автоматического перезаряжания ДПСВ/ОПСВ в ангаре, смонтирована механическая рука с захватом, обеспечивающая автоматический съем АПР с позиции разгрузки одного из ШТН, ее поворот вверх на угол 90° в вертикальной поперечной плоскости и подъем в верх в раскрытые люк подпола ангара и бомбоотсек ДПСВ/ОПСВ для ее подвески на автоматические замки крепления балочного держателя, причем после выполнения всех вышеперечисленных операций в обратном порядке с автоматической выкаткой стойки-ложемента из ангара на ГВПП заправленного топливом и с боекомплектом ДПСВ/ОПСВ, жестко удерживаемого фиксаторами задних колес на ГВПП и переднего колеса на стойке-ложементе до тех пор, пока его несущая система достигнет необходимого уровня подъемной силы, затем синхронно и автоматически отключается работа замков всех фиксаторов и выполняется вертикальный его взлет.
Кроме того, в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с один или несколькими датчиками, включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей упомянутый следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование упомянутого следящего полета ведомым ДПСВ через компьютер управления полетом.
Кроме того, для экономичного скоростного горизонтального полета упомянутых ОПСВ и ДПСВ каждый ОНВ в синхронно-сбалансированной несущей и авторотирующуей системе, включающей в упомянутом консольном редукторе автоматическую коробку передач, имеющую для привода ОНВ выходные упомянутые валы, каждый из которых создает по два потока: первый - взлетный с выдачей соответствующей мощности от соответствующего КГтД и созданием подъемной тяги от ОНВ, второй - крейсерский в конфигурации автожира с приемом мощности от авторотации каждого ОНВ на ее соответствующую ступень, отключающую оба ОНВ от привода ССТ упомянутых КГтД, приводящую генератор и управляющую синхронным снижением и скорости их вращения, например, до 200 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ОНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы упомянутых ПСК и ВСК, но и плоскостью вращения лопастей ОНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ОНВ на 12-15% от общего сопротивления профиля лопастей ОНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых ПСК и ВСК с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного реактивного самолета.
Кроме того, для горизонтального полета на высоте 11 км упомянутых ОПСВ и ДПСВ, достигая маршевой тяговооруженности с 0,36 до 0,43, используется мощность их СУ с 54% до 72% от работающих КГтД на привод их ВОВ, упомянутая ССРК которых, имея по передней ее кромке угол стреловидности χ=+37° или χ=+43°, обеспечивает скорость 0,725 Маха (М) или 0,753 М, а при достижении маршевой тяговооруженности до 0,54 скорость повышается до М=0,786 или М=0,87 соответственно, при этом каждый КГтД снабжен в ССТ перед механизмом ВУВТ ее реактивного сопла форсажной камерой (ФК), использование которой с передней за ВОВ и задней перед ФК открытыми управляемыми створками гондолы для дополнительного в нее подвода воздуха на взлетных режимах или горизонтальном полете на высоте 11 км позволит с их перегрузом 15% достичь маршевой тяговооруженности до 0,68 или скорости до M=0,997 и М=1,04 соответственно в конфигурации транс- и сверхзвукового самолета.
Благодаря наличию этих признаков, позволяющих освоить малоэкипажный НПК (МНПК) с авиагруппой аппаратов вертикального взлета и посадки в ПАУК, включающем, по меньшей мере, один опционально пилотируемый самолет-вертолет (ОПСВ) с, по меньшей мере, одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ), которые используются, по меньшей мере, с одной вертолетной площадки МНПК, причем каждый ОПСВ и ДПСВ выполнен без вертикального оперения по интегральной компоновке летающее крыло дупланной схемы, которое имеет первое и второе стреловидные крылья (ПСК и ВСК), разнесенные между собой в продольном направлении, и снабжен в двухвинтовой поперечно-несущей схеме (ДПНС) однолопастными несущими винтами (ОНВ) с их противовесами, смонтированными на профилированных надкрыльных пилонах ПСК и крыльевых гондол, конструктивно объединяющих ПСК с ВСК, создающими в ДПНС-Х2 вертикальную тягу только при вертикальном и коротком взлете/посадке (ВВП и КВП) или на переходных режимах полета, но и снабжен не менее чем парой комбинированных газотурбинных двигателей (КГтД), левый и правый из которых установлен в соответствующей крыльевой гондоле и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и, по меньшей мере, одной свободной силовой турбиной (ССТ), имеющей круглое сопло со всеракурсным управлением вектора тяги (ВУВТ), передающей взлетную мощность комбинированной силовой установки (СУ) посредством системы трансмиссии на соответствующий ОНВ в симметрично-сбалансированной ДПНС-Х2 и/или ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, создает в пропульсивно-реактивной системе (ПРС-R2) синхронную реактивную тягу при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и оснащен в дупланной схеме разновеликими ПСК и ВСК, имеющими размах соответственно в 1,04 и 1,965 раза больше диметра (D) ОНВ при угле прямой стреловидности по передней кромке ВСК, например, χ=+37° или χ=+43°, который равновелик углу стреловидности по передней кромке ПСК, имеющего передние наплывы, образующие в плане V-образную конфигурацию с большим ее отличным углом стреловидности от ПСК, задняя кромка которого параллельно размещена в плане задней кромке внешних секций ВСК, размах внутренних секций последнего равновелик размаху ПСК, размещенными в плане при угле обратной стреловидности по задней кромке внутренних секций ВСК, образующих профилированную кормовую его часть с V-образной в плане задней кромкой, и интегрированными с крыльевыми гондолами, смонтированными большей их частью под или над ПСК и ВСК, повышающими их жесткость, противодействуя вредному влиянию дивергенции, особенно, внешних секций ВСК, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого или вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующие реактивные скоростной крылатый автожир или самолет с поперечными ОНВ, работающими на режимах их авторотации или в качестве несущих их широкохордовых лопастей-крыльев (ШЛК), образованных при фиксации ОНВ с их противовесами или трансформации их противовесов, осуществляемой на переходных режимах полета последовательно, когда после вертикального/короткого взлета, набора высоты и выполнения разгонного полета оба ОНВ одновременно предварительно остановлены так, что их противовесы и лопасти зафиксированы в плане соответственно от конца ПСК во внутрь к и наружу от оси симметрии или при остановленных ШЛК их профилированные противовесы снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 127° или 133° в горизонтальной плоскости и их размещения назад по полету и параллельно оси симметрии при фиксировании с соответствующей стреловидностью по передней кромке ШЛК левого и правого ОНВ, которые образуют с ПСК и ВСК равновеликую по передней кромке их стреловидность и организуют соответственно синхронно-симметричные несущие поверхности их ШЛК в полетной конфигурации реактивного самолета с ПРС-R2 и системой ступенчатых разноуровневых крыльев (ССРК), но и обратно. Все это позволит в реактивных ОПСВ и ДПСВ с ПСК, ВСК и при наличии ВУВТ круглых реактивных сопел их КГтД упростить управляемость и обеспечить ее стабильность. В крейсерском полете в конфигурации реактивных автожира и самолета с симметрично-сбалансированной соответственно авторотирующей и несущей системах, первая из которых снабжена многоскоростной автоматической коробкой передач, управляющей как снижением скорости вращения ОНВ до 200 мин-1 или 100 мин-1, так и углом атаки лопастей ОНВ, но и плоскостью их вращения, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета. Что при уменьшении вращательного сопротивления ОНВ на 15% приводит к возможности расчета его ПСК и ВСК на крейсерский полет с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного самолета. Размещение КГтД в крыльевых гондолах позволит в компоновке летающее крыло как выполнить несущий фюзеляж с его профилем по толщине достаточном только для размещения в нем внутренних отсеков вооружения, что уменьшит аэродинамическое его сопротивление, так и достичь в конфигурации реактивных автожира/самолета при барражирующем/горизонтальном полете скорости 550/924 км/ч, но и на форсажных режимах в конфигурации трансзвукового самолета обеспечить на высоте полета 11 км скорость его полета до 1060…1105 км/ч.
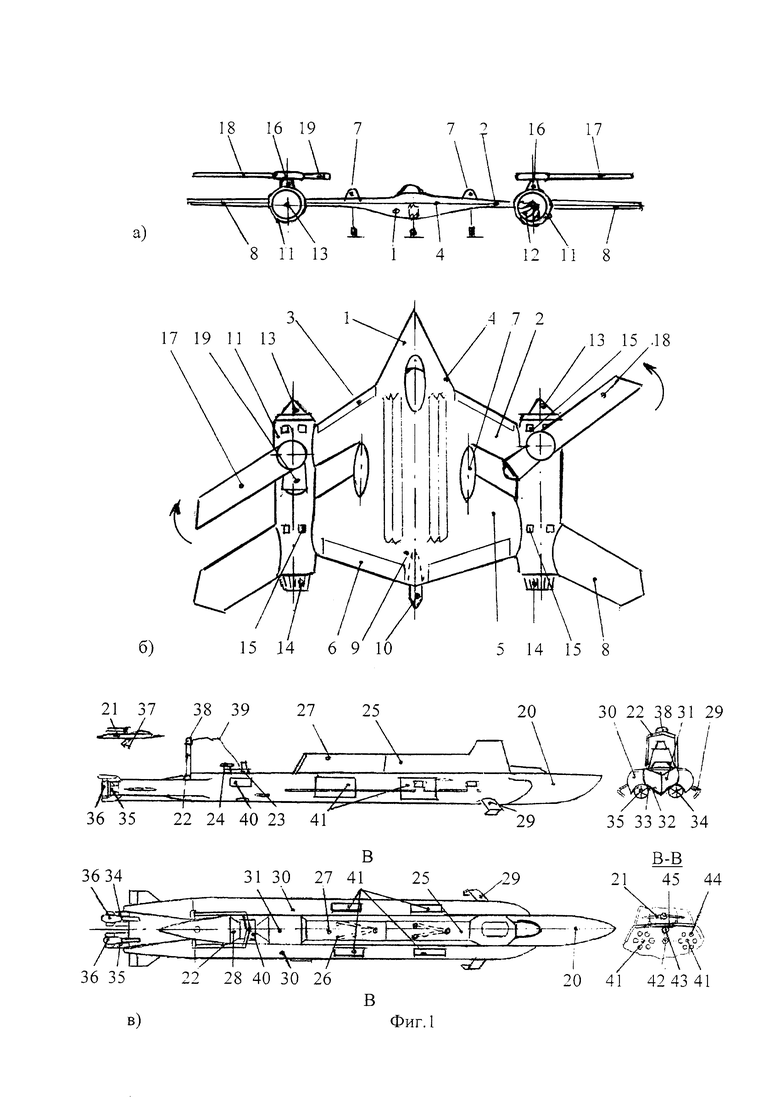
Предлагаемое изобретение предпочтительного МНПК с реактивными ДПСВ дупланной схемы с ПСК и ВСК и их стреловидностью по передней кромке χ=+43°, двумя КГтД, имеющими в каждом ССТ с ВУВТ реактивного сопла, установленными в крыльевых гондолах, объединяющих ПСК и ВСК, приводящими в кольцевых обтекателях два ВОВ в ПРС-R2 и в ДПНС-Х2 два ОНВ, смонтированных на концах ПСК, иллюстрируется на фиг. 1 и общих видах спереди и сверху соответственно а) и б):
а) в полетной конфигурации крылатого автожира или реактивного самолета с ПСК и ВСК, создающим большую подъемную силу, чем подъемная сила, создаваемая авторотирующими ОНВ или зафиксированными их ССРК, и двумя КГтД с ВОВ, размещенными в гондолах, создающими маршевую тягу в ПРС-R2 скоростного или трансзвукового полета с условным размещением авторотирующих наружу правого ОНВ с его профилированным противовесом или зафиксированного наружу от ПСК и перед ВСК левого ОНВ в его ССРК со сложенным его противовесом вдоль оси;
б) в полетной конфигурации вертолета или реактивного самолета с ПСК и ВСК с отклоненными их предкрылками и закрылками, уменьшая затенение на 7% от работающих поперечных ОНВ, создающих подъемную силу при выполнении ВВП и зависания или трансзвукового полета с условным размещением зафиксированного наружу от ПСК и перед ВСК левого ОНВ в его ССРК со сложенным его противовесом вдоль оси симметрии и работающими ВОВ с ВУВТ реактивных их сопел, создающих маршевую тягу в ПРС-R2, приводимых от двух КГтД с работающими двумя ССТ.
На фиг. 1в изображен МНПК 20 в трех проекциях с ПАУК в посадочной конфигурации ДПСВ 21 с использованием поворотной П-образной рамы 22 СШПВП на стойке-ложементе 23 стола спутника 24, перемещающегося во внутрь первого ангара 25 и опускается на стационарные V-образные в плане ложементы 26 на позиции стоянки при уложенных 17-18 ОНВ и внешних секций 7 ВСК 4 для перевозки, заправки топливом и заряжания боекомплектом на каждой станции, включая, второго ангара 27 и последующей выкатки стола-спутника 24 с задним ДПСВ 21 из ангара 27 на ГВПП 28 с разложенными внешними секциями 7 ВСК 4 и лопастями левого 17 и правого 18 ОНВ для его вертикального последующего взлета с ГВПП 28 МНПК 20.
Трансзвуковой ДПСВ в составе ПАУК, базируемого на МНПК, представлен на фиг. 1а и б, выполнен по концепции ДПНС-Х2 с ПРС-R2, имеет в интегральной компоновке летающего крыла дупланной схемы планер из алюминиевых сплавов и композитного углепластика, содержит несущий фюзеляж (НФ) 1, ПСК 2 с его предкрылками 3 и передними наплывами 4 и ВСК 5 с внутренними закрылками 6. Между ПСК 2 и ВСК 5 и на межкрыльевых наплывах НФ 1 смонтированы надкрыльные обтекатели 7 главных опор колес шасси. Внешние секции 8 ВСК 5, складывающиеся вверх для их размещения на стоянке над его внутренними секциями 5, образуют V-образную в плане заднюю его кромку с профилированной кормовой частью 9, снабженной по оси симметрии кормовым обтекателем 10, имеющим выдвижную штангу магнитометра и опускаемую лебедкой и буксируемую на тросе под водой антенну гидроакустической станции (на фиг. 1 не показано). Каждый КГтД с ССТ установлен в крыльевой гондоле 11, объединяющей консоли ПСК 2 и ВСК 5, приводит ВОВ 12 в кольцевом обтекателе, имеющем воздухозаборник с регулируемым коническим телом 13, экранирующим лопатки ВОВ 12. Каждый КГтД с ВОВ 12 и ССТ имеет ВУВТ круглого реактивного сопла 14 и передние и задние управляемые створки 15 гондолы для дополнительного в нее подвода воздуха. На концах ПСК 2 смонтированы надкрыльные пилоны 16 с левым 17 и правым 18 ОНВ, имеющими для полной компенсации реактивного крутящего момента на режимах ВВП и зависания противоположное их вращение соответственно по часовой и против часовой стрелки, выполнены с автоматом перекоса и жестким креплением их лопастей 17-18 и профилированных противовесов 19. Консольные редукторы ОНВ 17-18 размещены в профилированных надкрыльных пилонах 16, выходные вертикальные валы которых равноудалены в плане от центра масс и отклонены назад по полету на угол (α), который равен 1/2 величине угла атаки (α) ПСК 2.
Комбинированная СУ включает два КГтД, имеющих ССТ с ВУВТ реактивных круглых их сопел 14, снабжены передним выводом вала для отбора их мощности и возможности передачи взлетной мощности от них на консольные редукторы (на фиг. 1 не показаны) поперечных ОНВ 17-18, которые передают 100% или на промежуточные редукторы 36…54% ОНВ 17-18 от взлетной мощности СУ при выполнении ВВП и зависания или горизонтального поступательного крейсерского полета между соответственно двумя ОНВ 17-18 в ДПНС-Х2 или двумя ВОВ 12 в ПРС-R2 соответственно.
Управление трансзвукового ДПСВ обеспечивается циклическим, общим и дифференциальным изменением шага ОНВ 17-18, а также синфазным и дифференциальным отклонением реактивных сопел 14 с ВУВТ в КГтД. При крейсерском скоростном или высокоскоростном полете в конфигурации крылатого автожира или реактивного самолета подъемная сила создается соответственно авторотирующими ОНВ 17-18 с ПСК 2 и ВСК 5 или ПСК 2 и ВСК 5 с зафиксированными ОНВ 17-18 (см. фиг. 1б) в ССРК, маршевая реактивная тяга - системой ПРС-R2 через реактивные сопла 14 с ВУВТ в КГтД, смонтированных в гондолах 11, на режиме перехода - ПСК 2 и ВСК 5 с ОНВ 17-18. После создания подъемной тяги ОНВ 17-18 в ДПНС-Х2 обеспечиваются режимы ВВП и зависания или КВП при создании реактивными соплами 14 с ВУВТ в КГтД требуемой маршевой тяги для поступательного полета (см. рис. 1a). При выполнении ВВП и зависания изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага левого 17 и правого 18 ОНВ в ДПНС-Х2 (см. рис. 16). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ОНВ 17-18. По мере разгона с ростом подъемной силы ПСК 2 и ВСК 5 подъемная сила ОНВ 17-18 уменьшается. При достижении скоростей полета 400…450 км/ч и для перехода на самолетный режим полета ОНВ 17-18 синхронно останавливаются так, что их лопасти-крылья 17-18 предварительно размещены при виде сверху параллельно передней кромке ПСК 2, которые затем синхронно останавливаются так, что ОНВ 17-18 зафиксированы в ССРК с прямой стреловидностью по передним их кромкам, образуя равновеликую стреловидность χ=+43° с ПСК 2 (см. фиг. 1б). При создании реактивной тяги круглыми реактивными соплами 14 производится высокоскоростной крейсерский полет ДПСВ, при котором изменение балансировку по тангажу, курсу и крену обеспечивается соответствующим отклонением реактивных сопел 14 с всеракурсным управлением вектора тяги каждого КГтД.
Малозаметный МНПК 20 с передними подводными крыльями 29, представленный на трех общих видах с необходимыми сечениями его корпуса на фиг. 1в, имеет три прочных разновеликих корпуса, два прочных меньших 30 корпуса из которых смонтированы со средним большим 31 бок о бок, образуя подводную частью его корпуса туннельного типа 32, снабжен в кормовой части арочных продольных каналах 33 левым 34 и правым 35 прямоточными высокоэффективными ВДНТ с поворотными эжекторными насадками 36 на их выходе. При вертикальной посадке ДПСВ 21 после зацепления гака 37 и коуша 38 троса 39, наматываемого лебедкой 40 с барабаном и следящим его электроприводом, установленной под центром ГВПП 28 в герметичном контейнере, втягиваются стойки П-образной рамы 22, которая после ее поворота вниз в горизонтальное положение, укладывается в углубление над центром ГВПП 28. Затем одновременно с подмоткой троса 39 на лебедку 40 ДПСВ 21 выполняет вертикальную посадку на поднятую стойку-ложемент 23, ложемент 24 которой фиксирует зажимами носовую подкрыльную часть однотипных ДПСВ 21.
На позиции заряжания боекомплектом, например, АПР, размещенными в ШТН 41 револьверного типа, смонтированных по два ШТН 41 с каждой стороны внутри каждого бокового 30 корпуса МНПК. Вдоль продольной оси среднего 31 корпуса между каждой парой ШТН, смонтированной по обе стороны от позиции автоматического перезаряжания ДПСВ 21 в каждом из ангаров 25, 27, смонтирована механическая рука 42 с захватом 43, обеспечивающая автоматический съем АПР 44 с позиции разгрузки из ШТН 41, ее поворот вверх на угол 90° в вертикальной поперечной плоскости и подъем в верх в раскрытые люки подпола 45 ангаров 25, 27 и бомбоотсек ДПСВ 21 для ее подвески на автоматические замки крепления (на фиг. 1в не показаны).
Таким образом, трансзвуковой ОПСВ и ДПСВ дупланной схемы с ПСК и ВСК, двумя КГтД с ССТ, имеющий для создания горизонтальной тяги два ВОВ в ПРС-R2 и вертикальной тяги два ОНВ в ДПНС-Х2 или подъемной силы соответственно с работающими ОНВ или зафиксированными их ССРК, представляет собой конвертоплан с ДПНС-Х2 и ПРС-R2, изменяющий свою полетную конфигурацию только благодаря изменении условий работы и фиксации ОНВ посредством того, что набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно передние кромки наступающих лопастей ОНВ и зафиксированных их ШЛК, увеличивающих несущую способность ССРК, выполняющих роль верхних ее секций.
Интегральная компоновка летающее крыло дупланной схемы с ПСК и ВСК увеличивают показатели аэродинамических и структурных преимуществ при преобразовании в трансзвуковой самолет с ССРК, особенно, с наличием дополнительных ШЛК поперечных ОНВ, зафиксированных на концах ПСК с такой же стреловидностью. Это позволит уменьшить вес планера ДПСВ, выполненного по малозаметной технологии с радиопоглощающими материалами, увеличить взлетный вес на 17% либо дальность полета на 29% при сохранении взлетного веса и обеспечить выполнение разведывательно-ударных операций в конфигурации крылатого автожира со скоростью 550 км/ч. Авиационная группа в составе ПАУК, включающая однотипные ОПСВ и ДПСВ (см. табл. 1 тип 1.2), используемые поочередно с вертолетной площадки МНПК, несущие в отсеках вооружения ОПСВ/ДПСВ по 3/4 штук АПР-3МЭ или ПКР типа X-35УЭ. В ПАУК головной ОПСВ, который полностью оцифрован с использованием новейших технологий, включая и совместное использование пилотируемых и беспилотных летательных аппаратов, так называемое manned and unmanned teaming (MUM-T), которое позволяет пилотам ОПСВ управлять ведомыми ДПСВ и контролировать траекторию полета группы ведомых ДПСВ и их боевые нагрузки, обеспечивающие противолодочную или противокорабельную и/или противовоздушную оборону. Четвертый уровень MUM-T, используемый в ПАУК, позволяет пилотам головного ОПСВ не только получать реальные сенсорные изображения с авиагруппы ведомых ДПСВ и управлять сенсорными и оружейными нагрузками, но и их навигацией и глобальным позиционированием при выполнении следящего совместного безопасного полета.
Несомненно, широкое применение в комбинированной СУ двух КГтД с ВОВ, в конструкции которых, используя турбины от ТРДД мод. АЛ-31Ф, позволит освоить семейство трансзвуковых ОПСВ и ДПСВ (см. табл. 1) для многоцелевых ПАУК, базируемых на малозаметных МНПК, повышающих их боевую устойчивость и безопасность, создающих буферную авиазону между ПВО НК-цели и авианесущем МНПК.

Источники информации:
1. Адрес в интернете: https://navy-chf.livejournal.com/1433004.html
2. Адрес в интернете https://en.wikipedia.org/wiki/BAE_Systems_Taranis
3. Адрес в интернете: http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml
4. Адрес в интернете: https://www.nasha-strana.info/archives/25587
5. Адрес в интернете: https://booksbunker.com/an_gusev/59167/280.html
6. Адрес в интернете: http://zonwar.ru/news/news_95_Duet.html
7. Адрес в интернете: https://topwar.ru/4864-tulskiy-kashtan.html
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| ГИБРИДНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2706430C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| СИСТЕМА ПОДВОДНАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ ТРАНСФОРМИРУЕМАЯ | 2019 |
|
RU2725567C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
Изобретение относится к средствам военной техники. Предлагается надводно-подводный корабль (НПК) с палубным авиационным ударным комплексом (ПАУК), содержащим беспилотный летательный аппарат, имеющий фюзеляж с отделяемой управляемой ракетой, среднерасположенное крыло с органами его управления, двигатель, бортовую систему управления (БСУ), обеспечивающую телемеханическое управление (ТМУ) с командного пункта (КП) НПК. Корабль с комплексом, использующим опционально и дистанционно пилотируемые самолеты-вертолеты интегральной компоновки, включает летающее крыло дупланной схемы, имеющее разновеликие первое и второе стреловидные крылья (ПСК и ВСК) и на концах ПСК два однолопастных несущих винта (ОНВ) с противовесами и две крыльевые гондолы, объединяющие ПСК и ВСК, имеющие свободные силовые турбины (ССТ), приводящие поперечные ОНВ и в кольцевых обтекателях выносные вентиляторы, создающие при вертикальном и коротком взлете/посадке пропульсивно-реактивную тягу, направленную горизонтально назад с работающими/авторотирующими ОНВ или зафиксированными их лопастями-крыльями от ПСК наружу при горизонтальном полете со всеракурсным изменением вектора тяги ССТ в конфигурации реактивных винтокрыла/автожира или трансзвукового самолета палубного базирования. Достигается увеличение весовой отдачи и боевой нагрузки, повышение скорости и дальности полета, увеличение вероятности поражения надводной, подводной и воздушной цели. 5 з.п. ф-лы, 1 ил.
1. Надводно-подводный корабль (НПК) с палубным авиационным ударным комплексом (ПАУК), содержащим беспилотный летательный аппарат, имеющий фюзеляж с отделяемой управляемой ракетой, среднерасположенное крыло с органами его управления, двигатель, бортовую систему управления (БСУ), обеспечивающую телемеханическое управление (ТМУ) с командного пункта (КП) НПК, отличающийся тем, что малоэкипажный НПК (МНПК) с авиагруппой аппаратов вертикального взлета и посадки в ПАУК, включающем по меньшей мере один опционально пилотируемый самолет-вертолет (ОПСВ) с по меньшей мере одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ), которые используются по меньшей мере с одной вертолетной площадки МНПК, причем каждый ОПСВ и ДПСВ выполнен без вертикального оперения по интегральной компоновке летающее крыло дупланной схемы, которое имеет первое и второе стреловидные крылья (ПСК и ВСК), разнесенные между собой в продольном направлении, и снабжен в двухвинтовой поперечно-несущей схеме (ДПНС) однолопастными несущими винтами (ОНВ) с их противовесами, смонтированными на профилированных надкрыльных пилонах ПСК и крыльевых гондол, конструктивно объединяющих ПСК с ВСК, создающими в ДПНС-Х2 вертикальную тягу только при вертикальном и коротком взлете/посадке (ВВП и КВП) или на переходных режимах полета, но и снабжен не менее чем парой комбинированных газотурбинных двигателей (КГтД), левый и правый из которых установлены в соответствующей крыльевой гондоле и выполнены в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере одной свободной силовой турбиной (ССТ), имеющей круглое сопло со всеракурсным управлением вектора тяги (ВУВТ), передающей взлетную мощность комбинированной силовой установки (СУ) посредством системы трансмиссии на соответствующий ОНВ в симметрично-сбалансированной ДПНС-Х2 и/или ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, создает в пропульсивно-реактивной системе (ПРС-R2) синхронную реактивную тягу при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и оснащен в дупланной схеме разновеликими ПСК и ВСК, имеющими размах соответственно в 1,04 и 1,965 раза больше диметра (D) ОНВ при угле прямой стреловидности по передней кромке ВСК, например χ=+37° или χ=+43°, который равновелик углу стреловидности по передней кромке ПСК, имеющего передние наплывы, образующие в плане V-образную конфигурацию с большим ее отличным углом стреловидности от ПСК, задняя кромка которого параллельно размещена в плане задней кромки внешних секций ВСК, размах внутренних секций последнего равновелик размаху ПСК, размещенными в плане при угле обратной стреловидности по задней кромке внутренних секций ВСК, образующих профилированную кормовую его часть с V-образной в плане задней кромкой, и интегрированными с крыльевыми гондолами, смонтированными большей их частью под или над ПСК и ВСК, повышающими их жесткость, противодействуя вредному влиянию дивергенции, особенно внешних секций ВСК, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого или вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующие реактивные скоростной крылатый автожир или самолет с поперечными ОНВ, работающими на режимах их авторотации или в качестве несущих их широкохордовых лопастей-крыльев (ШЛК), образованных при фиксации ОНВ с их противовесами или трансформации их противовесов, осуществляемой на переходных режимах полета последовательно, когда после вертикального/короткого взлета, набора высоты и выполнения разгонного полета оба ОНВ одновременно предварительно остановлены так, что их противовесы и лопасти зафиксированы в плане соответственно от конца ПСК вовнутрь к и наружу от оси симметрии или при остановленных ШЛК их профилированные противовесы снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 127° или 133° в горизонтальной плоскости и их размещения назад по полету и параллельно оси симметрии при фиксировании с соответствующей стреловидностью по передней кромке ШЛК левого и правого ОНВ, которые образуют с ПСК и ВСК равновеликую по передней кромке их стреловидность и организуют соответственно синхронно-симметричные несущие поверхности их ШЛК в полетной конфигурации реактивного самолета с ПРС-R2 и системой ступенчатых разноуровневых крыльев (ССРК), но и обратно.
2. Корабль с комплексом по п. 1, отличающийся тем, что в системе трансмиссии упомянутых ОПСВ и ДПСВ каждый их КГтД, например, с одной ССТ, имеющей для отбора взлетной ее мощности передний вывод вала, смонтированный по продольной оси его гондолы, в которой между упомянутыми ВОВ и ССТ смонтирован соосно с последними Т-образный как при виде сверху, так и сбоку промежуточный редуктор, имеющий продольный входной вал от ССТ и выходные как передний продольный, так и поперечный сбоку, но и верхний валы, первый из которых передает мощность через муфту сцепления на ВОВ, кольцевой обтекатель которого имеет воздухозаборник регулируемый с коническим центральным телом, второй синхронизирующий, проложенный в ПСК, вращательно связывает ССТ двух КГтД, а третий передает через муфту сцепления крутящий момент на входной вал соответствующего консольного редуктора ОНВ, размещенного в надкрыльном пилоне, имеет выходной вал, который размещен в плане на поперечной оси, проходящей через центра масс, и равноудален от центра масс, но и отклонен назад по полету на угол (α), который при виде сбоку равен 1/2 или равновелик величине угла атаки (α) соответственно ПСК или ВСК, а набегающий поток при вертикальном и горизонтальном их режимах полета встречают одновременно соответственно передние кромки наступающих лопастей ОНВ в упомянутой ДПНС-Х2 и зафиксированные их упомянутые ШЛК ОНВ, выполняющие роль верхних с ярусным размещением внешних секций ПСК в упомянутой ССРК, преобразующей умеренное удлинения ПСК и большое ВСК соответственно с λ=5,34…5,39 и λ=7,9…8,0 до удлинения ССРК с λ=4,88…4,96, а межгондольные секции упомянутых их ПСК и ВСК снабжены соответственно предкрылками и внутренними закрылками, используемыми на взлетно-посадочных или переходных режимах полета ОПСВ и ДПСВ, а упомянутые круглые сопла с ВУВТ их ССТ снабжены возможностью при синфазном и дифференциальном их синхронном отклонении обоих вертикально вверх или вниз, обоих горизонтально влево или вправо и вертикально одного вверх, а другого вниз изменять соответственно балансировку по тангажу, курсу и крену при горизонтальном поступательном полете ОПСВ и ДПСВ, при этом упомянутые ОПСВ и ДПСВ на их режимах ВВП и зависания в упомянутой ДПНС-Х2 левый и правый ОНВ, имеющие противоположное направление их вращения соответственно по часовой и против часовой стрелки, выполнены с жестким креплением их лопастей и автоматом их перекоса, обеспечивающие изменение балансировки по тангажу, курсу и крену, которое создается изменением соответствующего циклического шага и дифференциальным изменением тяги посредством общего шага упомянутых ОНВ соответственно, а их внешние секции упомянутого ВСК имеют на их законцовках спереди и сзади на их концах соответствующие инфракрасные (ИК) излучатели и тепловые камеры, причем после вертикальной посадки на вертолетную площадку МНПК упомянутых ОПСВ и ДПСВ конвертируемая система несущих поверхностей каждого из них имеет возможность как предварительной остановки их лопастей ОНВ вдоль консолей ПСК и размещения их законцовками к оси симметрии с последующим складыванием упомянутых их противовесов при их расположении вперед по полету и параллельно оси симметрии, так и синхронного складывания вверх внешних секций ВСК, размещающихся над его внешними секциями, но и их транспортирования в ангаре МНПК при уменьшении в 1,8…2,0 раза площади походной их конфигурации от взлетной их площади, а их упомянутое ВСК, имеющее при соотношении его площади 56,6%…57,1% от суммы площадей всех несущих поверхностей, включая площади упомянутых ПСК и ВСК с их несущим фюзеляжем и ШЛК двух ОНВ, снабжено от задней его кромки вдоль оси симметрии кормовым обтекателем, имеющим на его конце отсек с выдвижной штангой магнитометра и в нижнем его отсеке с открываемыми створками опускаемую лебедкой и буксируемую на тросе под водой антенну гидроакустической станции при барражирующем его полете, при этом упомянутые ОПСВ и ДПСВ, несущие авиационные противолодочные и противокорабельные ракеты (АПР и ПКР), обеспечивают соответствующую борьбу с подводной лодкой (ПЛ) и надводным кораблем (НК), причем при противолодочной обороне в упомянутых ОПСВ и ДПСВ используется опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на МНПК для обработки в реальном масштабе времени или высокочувствительный магнитометр, имеющий магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и связанным с БСУ в упомянутых ОПСВ и ДПСВ, предусматривающей выдачу команд на включение в расчетной точке магнитометра и на управление после срабатывания магнитометра при обнаружении ПЛ-цели, но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на МНПК и его КП, при этом в упомянутых ОПСВ и ДПСВ упомянутая их БСУ имеет как радиоканал закрытой связи с МНПК, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при барражирующем полете самостоятельное нахождение ПЛ-цели, идентификации ее и принятие подтвержденного решения от оператора МНПК об уничтожении им выбранных, причем при противокорабельной обороне упомянутые ОПСВ и ДПСВ, использующие полетную конфигурацию упомянутого реактивного самолета с зафиксированными ШЛК ОНВ, несущие в бомбоотсеке соответствующие ПКР Х-35У или ПКР Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом радаром типа Н036 с головного ОПСВ обеспечивается целеуказание, а управление ДПСВ-вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны - станцию активных электронных помех ДПСВ, причем при достижении области, из которой будет поражена НК-цель, упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1263 км автоматически возвращается на МНПК с вертикальной на его вертолетную площадку посадкой, при этом в упомянутых ОПСВ и ДПСВ планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, снабжен в нижней его части колесным шасси с убирающимися опорами в три отсека и пусковыми устройствами вооружения в бомбоотсеках, каждый их которых имеет по две автоматические створки с пилообразными поперечными их сторонами, а БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, размещенные бок о бок и срабатывающие на режимах ВВП и зависания поочередно, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми, например, двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного ОПСВ, а другой управляется вторым пилотом с головного ОПСВ, а затем и наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован, чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете, причем главные стойки боковых колес, убираемых вперед по полету в надкрыльные обтекатели, интегрированные с внешними заостренными в поперечном сечении профилированными бортами межкрыльевой части несущего фюзеляжа, размещенные между ПСК и ВСК, имеют спереди и сверху радиопрозрачные их отсеки для установки в них антенн с каналом приема-передачи данных.
3. Корабль с комплексом по п. 1, отличающийся тем, что упомянутый МНПК имеет три прочных корпуса, расположенных горизонтально рядом так, что по бокам от среднего прочного корпуса смонтированы бок о бок еще два прочных корпуса, каждый из которых выполнен с меньшим диаметром, составляющим 55% от диаметра большего корпуса, но и способен погружаться с надводного положения в подводное и обратно, а также перемещаться под водой или по воде и в полупогруженном состоянии, последнее, наряду с радиопоглощающим покрытием удобообтекаемой центральной надстройки, имеющей наклоненные боковые панели, повышает малозаметность и предопределяет большую скрытность по сравнению с обычным надводным кораблем, при этом МНПК, подводная часть корпуса которого выполнена в виде туннельного типа с одной площадью ватерлинии, имеет по обе стороны от оси его симметрии совместно с боковыми его корпусами криволинейную форму нижней части его корпуса и снабжен двумя с открытым низом арочными продольными каналами, расположенными, образуя при виде спереди гребенчатую конфигурацию, параллельно оси симметрии, оснащен вдоль продольной оси каждого из каналов левым и правым прямоточными высокоэффективными водометными движителями насосного типа (ВДНТ) с поворотными эжекторными насадками на их выходе, обеспечивающими в конфигурации надводного корабля-тримарана с максимальной шириной кормовой части корпуса МНПК возможность его использования или при отсутствии воздушного зазора в районе верхней поверхности каждого арочного канала для исключения влияния ударных вертикальных нагрузок в этом районе каждого арочного канала при движении на встречном волнении, или при отсутствии большого волнения после продувки соответствующих балластных цистерн может перемещаться, увеличив скорость хода при той же мощности двигателей и имея геометрию с минимальным волновым сопротивлением посредством того, что наружные стенки арочных каналов в корпусе МНПК размещены параллельно его оси симметрии, образуя ширину палубы МНПК с наружными стенками боковых корпусов МНПК в районе кормовой оконечности практически параллельны оси симметрии и, следовательно, разрежение, которое возникает на корпусе в этом районе по бортам, при движении со скоростью, соответствующей FrL≅0,5, не будет влиять на сопротивление корпуса МНПК, особенно с использованием передних подводных крыльев, причем в носовой части МНПК установлен малогабаритный гидроакустический комплекс МГК-13П "Припять-Пм", а также четыре торпедных аппарата ПТА-53 калибра 533 миллиметра, размещенных в первом его отсеке с боезапасом из восьми торпед, причем прочная рубка, снабженная за ней и спереди комплексами соответственно двумя побортно зенитными АК-630М-2 "Дуэт" и зенитным ракетно-артиллерийским 3М87 "Кортик", убирающимися в походном подводном положении в контейнеры внутри легкого корпуса МНПК, оснащена вдоль продольной оси среднего корпуса в его продолжение кормовым авиационным прочным ангаром для размещения в нем на стационарных V-образных в плане ложементах, фиксирующих переднее и два задних колеса шасси, например, двух расположенных тандемом ДПСВ и ОПСВ, имеющим с его заднего торца автоматически раскрываемые соответствующие прочные люки, при этом прочный ангар снабжен выдвижной телескопической стойкой-ложементом, ложемент которой фиксирует зажимами носовую подкрыльную часть однотипных ДПСВ и ОПСВ, имеет как возможность после расфиксации трех колес ДПСВ/ОПСВ на соответствующем V-образном в плане ложементе и поднятия стойки-ложемента с носовой его опорой переднего колеса, так и возможность при поднятой стойке-ложементе буксирования на задних колесах вдоль продольных направляющих, размещенных параллельно оси симметрии МНПК, вперед или назад при фиксированном размещения на стойке-ложементе ДПСВ/ОПСВ с зафиксированными его ОНВ и сложенными внешними секциями ВСК соответственно в заряжающую или заряженную походные конфигурации, причем средний прочный корпус на верхней его части за кормовым ангаром снабжен горизонтальной взлетно-посадочной площадкой (ГВПП), имеющей длину равновеликую длине фюзеляжа ДПСВ/ОПСВ с вращающимися ОНВ и систему принудительной сушки ее поверхности, но и в ее центре систему швартовки и принудительной вертикальной посадки (СШПВП) ДПСВ/ОПСВ на выдвинутую из ангара стойку-ложемент, при этом кормовая СШПВП, обеспечивающая возможность посадки ДПСВ/ОПСВ на стойку-ложемент МНПК при его кренах до 25° и представляющая собой при виде сзади П-образную раму с телескопическими боковыми стойками, размещенную перпендикулярно продольной оси среднего корпуса МНПК, выполнена с возможностью ее поворота в вертикальной плоскости вдоль последнего с горизонтального в вертикальное положение, снабжена сверху по краям и в середине ее поперечины ИК-приемниками, взаимодействующими с соответствующими ИК-излучателями ДПСВ/ОПСВ и автоматически корректирующими его маневры при посадке с использованием СШПВП, и цанговым узлом с пропущенным через него тросом с развитым эллипсовидным коушем, размещенным в центрирующем узле строго вдоль поперечины большей его осью и взаимодействующим с захватом отклоняемого вниз при посадке гака ДПСВ и ОПСВ, закрепленного под центром его масс, причем при вертикальной посадке ДПСВ/ОПСВ после зацепления гака и коуша троса его намотка/размотка производится сквозь палубный герметичный узел на ГВПП и обеспечивается лебедкой с барабаном и следящим его электроприводом, установленной под центром ГВПП в герметичном контейнере внутри легкого корпуса, с последующим разжимом цангового узла поперечины и одновременным втягиванием стоек П-образной рамы и ее поворота в горизонтальное положение так, что ее поперечина с цанговым узлом скользя по тросу опускается вниз и размещается в соответствующем углублении над центром ГВПП, после чего ДПСВ/ОПСВ осуществляет вертикальную посадку на стойку-ложемент с одновременной подмоткой троса, затем после фиксации зажимами носовой части ДПСВ/ОПСВ захват его гака отсоединяется от коуша троса и стойка-ложемент с закрепленным на нем передней стойки колеса ДПСВ/ОПСВ буксируется на задних колесах во внутрь ангара и соответственно фиксируются задние колеса и опускается с фиксацией переднее колесо на стационарные V-образные в плане ложементы на позиции заправки топливом и заряжания боекомплектом, например, АПР, размещенными в шестипозиционных транспортных накопителях (ШТН) револьверного типа, смонтированных по два ШТН с каждой стороны внутри каждого бокового корпуса, при этом вдоль продольной оси среднего корпуса между каждой парой ШТН, смонтированной по обе стороны от позиции автоматического перезаряжания ДПСВ/ОПСВ в ангаре, смонтирована механическая рука с захватом, обеспечивающая автоматический съем АПР с позиции разгрузки одного из ШТН, ее поворот вверх на угол 90° в вертикальной поперечной плоскости и подъем в верх в раскрытые люк подпола ангара и бомбоотсек ДПСВ/ОПСВ для ее подвески на автоматические замки крепления балочного держателя, причем после выполнения всех вышеперечисленных операций в обратном порядке с автоматической выкаткой стойки-ложемента из ангара на ГВПП заправленного топливом и с боекомплектом ДПСВ/ОПСВ, жестко удерживаемого фиксаторами задних колес на ГВПП и переднего колеса на стойке-ложементе до тех пор, пока его несущая система достигнет необходимого уровня подъемной силы, затем синхронно и автоматически отключается работа замков всех фиксаторов и выполняется вертикальный его взлет.
4. Корабль с комплексом по п. 2, отличающийся тем, что в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с один или несколькими датчиками включает в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом приема-передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей упомянутый следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование упомянутого следящего полета ведомым ДПСВ через компьютер управления полетом.
5. Корабль с комплексом по любому из пп. 1-3, отличающийся тем, что для экономичного скоростного горизонтального полета упомянутых ОПСВ и ДПСВ каждый ОНВ в синхронно-сбалансированной несущей и авторотирующуей системе, включающей в упомянутом консольном редукторе автоматическую коробку передач, имеющую для привода ОНВ выходные упомянутые валы, каждый из которых создает по два потока: первый - взлетный с выдачей соответствующей мощности от соответствующего КГтД и созданием подъемной тяги от ОНВ, второй - крейсерский в конфигурации автожира с приемом мощности от авторотации каждого ОНВ на ее соответствующую ступень, отключающую оба ОНВ от привода ССТ упомянутых КГтД, приводящую генератор и управляющую синхронным снижением и скорости их вращения, например, до 200 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ОНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы упомянутых ПСК и ВСК, но и плоскостью вращения лопастей ОНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ОНВ на 12-15% от общего сопротивления профиля лопастей ОНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых ПСК и ВСК с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного реактивного самолета.
6. Корабль с комплексом по любому из пп. 1-3, отличающийся тем, что для горизонтального полета на высоте 11 км упомянутых ОПСВ и ДПСВ, достигая маршевой тяговооруженности с 0,36 до 0,43, используется мощность их СУ с 54% до 72% от работающих КГтД на привод их ВОВ, упомянутая ССРК которых, имея по передней ее кромке угол стреловидности χ=+37° или χ=+43°, обеспечивает скорость 0,725 Маха (М) или 0,753 М, а при достижении маршевой тяговооруженности до 0,54 скорость повышается до М=0,786 или М=0,87 соответственно, при этом каждый КГтД снабжен в ССТ перед механизмом ВУВТ ее реактивного сопла форсажной камерой (ФК), использование которой с передней за ВОВ и задней перед ФК открытыми управляемыми створками гондолы для дополнительного в нее подвода воздуха на взлетных режимах или горизонтальном полете на высоте 11 км позволит с их перегрузом 15% достичь маршевой тяговооруженности до 0,68 или скорости до М=0,997 и М=1,04 соответственно в конфигурации транс- и сверхзвукового самолета.
| RU 2004120565 A, 10.12.2005 | |||
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
| Быстроходное надводное судно | 1973 |
|
SU676153A3 |
| US 6655631 B2, 02.12.2003. | |||

