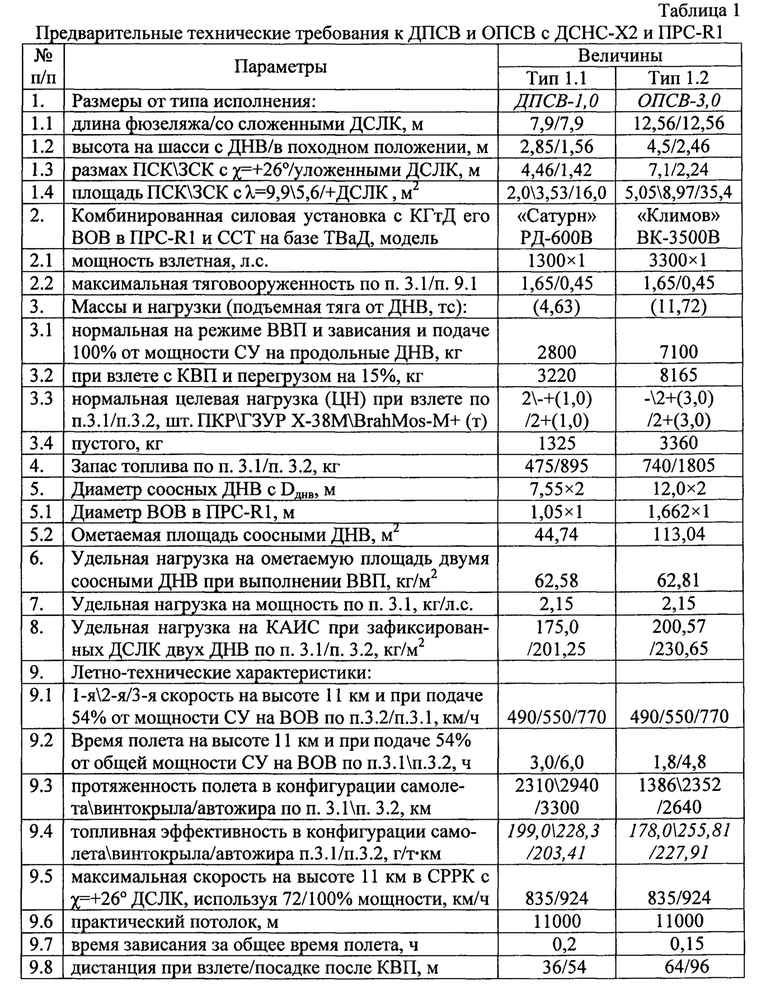
Изобретение относится к палубным авиационным ударным комплексам, включающим опционально и дистанционно пилотируемые самолеты-вертолеты с тандемными крыльями, имеющие на пилоне фюзеляжа два двухлопастных несущих винта (ДНВ) и в кормовой гондоле свободную силовую турбину, приводящую ДНВ и выносной турбовентилятор, создающие при вертикальном и коротком взлете и посадке (ВВП и КВП) подъемную силу и реактивную маршевую тягу, направленную назад с работающими/авторотирующими соосными ДНВ или зафиксированными над центром масс их дупланными стреловидными лопастями-крыльями, размещенными наружу от оси симметрии и в плане параллельно тандемным крыльям при горизонтальном полете в конфигурации реактивных винтокрыла/автожира и самолета-триплана, но и после их посадки на палубу авианесущего корабля-носителя (АКН) преобразуемые в походную конфигурацию посредством складывания лопастей ДНВ, консолей крыльев и килей V-образного оперения для корабельного и воздушного базирования с последующим их взлетом с вертолетной площадки АКН и запуском в полете с истребителя-носителя, несущего их после взлета с АКН и посадку его пустого на палубу АКН.
Известен самолет вертикального взлета и посадки (СВВП) мод. S-57 [1] компании Sikorsky (США) проекта XV-2, имеющий высокорасположенное крыло, останавливаемый и убираемый в продольный отсек верхней части фюзеляжа однолопастной несущий винт (НВ) с противовесом, снабжен реактивным соплом, струйной системой и воздуховодом от турбореактивного двигателя (ТРД) силовой установки (СУ), подкрыльным двухкилевым оперением и трехопорным убирающимся колесным шасси.
Признаки, совпадающие - наличие в верхней части фюзеляжа однолопастного НВ, создающего только вертикальную тягу, имеющего струйную систему с воздуховодом, проложенным внутри колонки вала и НВ, обеспечивающим равномерный отбор мощности ТРД, воздух которого, направляясь к реактивному соплу НВ, будет его вращать и создавать подъемную силу. Особенностью СВВП проекта XV-2 - конструкция НВ с регулируемой циркуляцией и неподвижное его размещение в фюзеляже: при переходе в самолетный режим полета останавливался НВ, имеющий узлы складывания колонки вала и фиксирования лопасти, которые укладывались в фюзеляж.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на верхней части фюзеляжа останавливаемого и убираемого НВ, имеющего автомат перекоса его лопасти с управлением его общего и циклического изменения его шага, что предопределяет конструктивно сложную складываемую колонку его вала и противовес с воздуховодами, что усложняет конструкцию и уменьшает надежность, но и значительно увеличивает габаритные размеры по высоте с вращающимся НВ. Вторая - это то, что диаметр НВ ограничен длиной фюзеляжа и как, следствие, при висении поток от НВ, обдувая консоли крыла и создавая значительную общую потерю (≈ 34%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что однодвигательная СУ включает ТРД избыточной мощности, используемой при выполнении ВВП на 100%, что весьма снижает наработку на отказ и надежность, особенно, при его отказе, а расположение под дельтовидным крылом вертикальных килей, имеющих на их законцовках обтекатели с задними колесами шасси, что ограничивает, повышая аэродинамическое сопротивление, достижение скорости более 745 км/ч. Все это также ограничивает возможность уменьшения массы конструкции планера, улучшения весовой отдачи и повышения целевой нагрузки (ЦН).
Известен комбинированный вертолет модели S-72 [2] компании Sikorsky (США), выполненный по одновинтовой схеме с Х-образным НВ и рулевым винтом, низкорасположенным крылом, комбинированной СУ и двумя турбовальными двигателями, передающими крутящий момент через систему трансмиссии на винты, обеспечивающие только вертолетные режимы полета и два турбовентиляторных реактивных двигателя, используемых на самолетных режимах полета, размещены в носовой части по бокам фюзеляжа, хвостовое оперение и трехстоечное колесное шасси, убирающееся.
Признаки, совпадающие - наличие главного редуктора и соединительных валов трансмиссии, передающих мощность Х-образному НВ и рулевому винту, создающим вертикальную тягу и управление по курсу при выполнении ВВП и зависания, а два турбовентиляторных реактивных двигателя (ТВрД), обеспечивают реактивную тягу при горизонтальном полете. Вращение Х-образного НВ и рулевого винта - синхронизирующее, избыточная тяговооруженность комбинированной СУ, создающей большой диапазон скоростей его горизонтального полета 325…490 км/час при авторотации Х-образного НВ, а при его фиксации в Х-крыло скорость составит 555 км/ч.
Причины, препятствующие поставленной задаче: первая - это то, что силовая установка включает разнотипные двигатели - это усложняет конструкцию и снижает надежность крейсерского полета при отказе одного из двух турбовентиляторных реактивных двигателей; вторая - это то, что при вертикальном взлете поток от X-образного НВ, обдувая консоли крыла и создавая значительную потерю в вертикальной его тяге, затормаживается, а большие скорости потока отбрасываемого от консолей крыла предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги Х-образного НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность; третья - это то, что при взлете Х-образный НВ вращается, как четырехлопастной НВ, а при переходе к горизонтальному полету он останавливался, превращаясь в высокорасположенное Х-крыло; четвертая - это то, что для выполнения вертолетных и самолетных режимов полетов имеется двойная раздельная система создания вертикальной подъемной силы и маршевой реактивной тяги при соответствующей работе X-образного НВ с рулевым винтом при выполнения ВВП и двух ТВрД при горизонтальном полете, что неизбежно ведет к утяжелению конструкции планера, увеличению расхода топлива и объема регламентных работ, но и уменьшению весовой отдачи.
Наиболее близким к предлагаемому изобретению является корабельный противолодочный ракетный комплекс (ПЛРК) модели "Icara" [3] (Великобритания), содержащий крылатую ракету-носитель (КРН), применяемую с пускового устройства (ПУ) корабля, имеет фюзеляж с отделяемой управляемой ракетой, крыло и хвостовое оперение, двигатель, бортовую систему управления (БСУ), обеспечивающую телемеханическое управление (ТМУ) с его командного пункта (КП).
Признаки, совпадающие - габариты КРН без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м. Боевая часть: самонаводящаяся противолодочная малогабаритная торпеда (МГТ) Мк.44. Летные характеристики: максимальная и минимальная высота полета соответственно 300 м и 15-20 м. Ввиду значительного веса ОКРН с торпедой Mk.44 составляющего 1480 кг (при массе 13% целевой нагрузки - торпеды 196 кг, ее длине 2,57 м и диаметре 324 мм) и малых дальности 24 км и скорости полета 140-240 м/с, а боевой части (торпеды - 30 узлов и дальность хода 5 км).
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового КРН осуществлялся в направлении, максимально приближающем к цели сбрасываемую торпеду. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем передавал их через радиокомандную систему управления на КРН в полете. По прибытии КРН в район нахождения цели торпеда (самонаводящаяся МГТ Мк.44), полу утопленная с подфюзеляжным ее расположением в корпусе КРН по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск ПЛ-цели. После чего КРН продолжает полет с работающей СУ, уводя ее от места приводнения самонаводящейся МГТ, чтобы не создавать помех системе ее самонаведения. Сама же одноразовая КРН уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном корабельном ПЛРК "Icara" (Великобритания) увеличения боевой нагрузки и весовой отдачи, повышения скорости и дальности полета, увеличения вероятности поражения надводной, подводной и воздушной цели, расположенной на большой дальности, но и возможности ее атаки после продолжительного полет в режиме зависания, возврата на вертолетную площадку АКН для повторного использования и трансформации в походную конфигурацию для корабельного или воздушного базирования.
Отличительными признаками предлагаемого изобретения от указанного выше известного корабельного ПЛРК "Icara", наиболее близкого к нему, являются наличие того, он включает группу аппаратов вертикального взлета и посадки корабельного или воздушного базирования, в состав первого или второго входит соответственно один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ) или только более чем один ДПСВ, используемые с вертолетной площадки авианесущего корабля-носителя (АКН) или с ПУ истребителя-носителя (ИН), причем каждый ОПСВ и ДПСВ снабжен в двухвинтовой соосно-несущей схеме (ДСНС) на пилоне фюзеляжа двухлопастными несущими винтами (ДНВ), создающими в ДСНС-Х2 вертикальную тягу только на переходных режимах полета и при вертикальном и коротком взлете/посадке (ВВП и КВП) и, по меньшей мере, одним комбинированным газотурбинным двигателем (КГтД), выполненным в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) и, по меньшей мере, с одной свободной силовой турбиной (ССТ), передающей взлетную мощность силовой установки (СУ) посредством системы трансмиссии на ДНВ в симметрично-сбалансированной ДСНС-Х2 и/или один ВОВ, имеющий лопатки с большой их круткой, работающий по тянущей схеме для создания в пропульсивно-реактивной системе (ПРС-R1) реактивной тяги, направленной горизонтально и по оси симметрии при выполнении КВП и на переходных режимах полета или горизонтальном поступательном полете, и в схеме тандем передним и задним стреловидными крыльями (ПСК и ЗСК), имеющими среднее и высокое расположение соответственно на фюзеляже и на законцовках V-образного хвостового оперения, снабженного рулями направления, и выполнен как возвращаемым на АКН, так и с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета с ДСНС-Х2 и ПРС-R1 в соответствующие реактивные крылатый автожир для барражирующего полета или самолет-триплан при максимальном или нормальном взлетном весе соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или в качестве несущих их дупланных стреловидных лопастей-крыльев (ДСЛК) после трансформации ДНВ, выполняемой последовательно, когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их лопасти как предварительно размещены перпендикулярно к передней кромке соответствующих консолей ПСК и ЗСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 90° в горизонтальной плоскости наружу от центра масс так, что две верхние и две нижние из них фиксируются соответственно с прямой стреловидностью по передним кромкам ДСЛК ДНВ, образующих с соответствующими консолями ПСК и ЗСК равновеликую стреловидность χ=+23° или χ=+26°, организующих относительно оси симметрии синхронно-зафиксированные разно-уровневые их ДСЛК, передние кромки которых размещены в плане параллельно передним кромкам ПСК и ЗСК в полетной конфигурации самолета-триплана с ПРС-R1 и системой разнесенных разноуровневых крыльев (СРРК), преобразующей при удельной нагрузке на мощность ρN=2,15 кг/л.с. и большом удлинением ПСК и ЗСК λ=9,9/5,6 с соответствующей их стреловидностью схему тандем в аэродинамическую схему продольного триплана, включающую ПСК и ЗСК совместно с зафиксированными ДСЛК верхнего и нижнего ДНВ, размещенными в плане между консолей ПСК и ЗСК, но и обратно, при этом в системе трансмиссии, например, один КГтД с кольцевым обтекателем ВОВ размещен за центром масс в кормовой гондоле, в которой между ВОВ и ССТ смонтирован соосно с двумя последними промежуточный редуктор, имеющий продольный по его оси и входной вал от ССТ, но и выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соответствующий входной вал соосного редуктора ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (α), который равновелик или равен 1/2 величине угла (αкр) атаки ЗСК или ПСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных их ДСЛК, выполняющих с ПСК и ЗСК в СРРК роль высокорасположенных разрезных крыльев, при этом на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДСНС-Х2 от работающих ДНВ, выполненных с жестким креплением их лопастей, создается противоположным направлением вращения верхнего и нижнего ДНВ соответственно, например, по часовой и против часовой стрелки Или против часовой и по часовой стрелки.
Кроме того, в упомянутых ОПСВ и ДПСВ при выполнении технологии КВП в конфигурации винтокрыла или крылатого автожира с упомянутыми ПСК и ЗСК, снабженными по всему их размаху соответственно закрылками и закрылками с элевонами, имеют равновеликий их размах, который в 1,69 раза меньше диметра (D) ДНВ, а изменение балансировки по тангажу, крену и курсу при их управлении обеспечивается изменением соответствующего циклического шага посредством автомата перекоса нижнего ДНВ и дифференциальным изменением тяги общего шага упомянутых ДНВ соответственно, а скошенные их боковые стороны каждого фюзеляжа в соответствующих его носовой, центральной и кормовой частях, включая и мотогондолу с ее плоским соплом, уменьшая эффективную площадь рассеивания, образуют при виде спереди пятигранное или шестигранное поперечное сечение, но и среднюю часть фюзеляжа граненной конфигурации с острой средней линией, непрерывно распространяющейся от носа до хвоста, а их упомянутые кили V-образного оперения и внешние консоли ЗСК, имея равновеликую соответствующую стреловидность, образуя их совместную конфигурацию типа чайка, смонтированы при виде спереди соответственно по внешним бортам хвостовых балок наружу под углом 10° от плоскости симметрии и от изломов в конфигурации типа чайка горизонтально или наклонно вниз, а их упомянутые ПСК и ЗСК, имеющие при соотношении их площадей соответственно 36,0% и 64,0% от общей их площади, которая в свою очередь составляет 34,68%-39,6% от суммы площадей двух ПСК и ЗСК с ДСЛК двух ДНВ, но и в свою очередь большую площадь двух последних, составляющую 53,1%-65,57% от площади двух ПСК и ЗСК, при этом в упомянутых ОПСВ и ДПСВ трапециевидные подфюзеляжные кили, смонтированные при виде спереди наружу, снабжены на их законцовках обтекателями, имеющими спереди и сзади на их концах соответствующие инфракрасные (ИК) излучатели и тепловые камеры, а снизу - не убираемые колеса шасси с амортизируемыми главными опорами, работающими с носовой убираемой вспомогательной опорой переднего колеса, причем в упомянутых ОПСВ и ДПСВ между хвостовых балок имеется профилированная концевая часть, которая интегрирована между хвостовых балок, имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно скошенной в упомянутом КГтД задней кромке его плоского сопла, имеющего термопоглощающее покрытие, уменьшающее ИК-заметность, при этом после вертикальной посадки упомянутых ОПСВ и ДПСВ корабельного или воздушного базирования ДПСВ на вертолетную площадку или палубу АКН в конвертируемой системе несущих их поверхностей имеется возможность как синхронного укладывания в соответствующие боковые отсеки фюзеляжа, снабженные открываемыми створками, консолей ПСК посредством поворачивания в горизонтальной плоскости его консолей назад по полету на узлах поворота, размещенных в корневых частях возле передней кромки ПСК, смонтированных по обе стороны от оси симметрии, так и поочередного складывания килей V-образного оперения и консолей ЗСК соответственно во внутрь к плоскости симметрии и обратно вниз, размещаясь при этом в соответствующих кормовых утонченностях фюзеляжа и вдоль боковых его сторон, высота которых, включая высоту пилона и втулок ДНВ, равновелика размаху соответствующих сложенных килей V-образного оперения и консолей ЗСК, но и втягивания в соосной колонке валов упомянутых ДНВ внутреннего телескопического верхнего вала при предварительно сложенных лопастях ДНВ в упомянутые ДСЛК, размещенные их двумя верхними над двумя нижними лопастями, зафиксированы с их законцовками, направленными назад по полету и не выходящими за кормовую часть фюзеляжа, причем при корабельном или воздушном базировании упомянутых ОПСВ с ДПСВ в походно-транспортной на шасси или ДПСВ с убранным шасси в полетно-транспортной конфигурации соответственно без верхнего или с верхним сбрасываемым обтекателем колонки валов, втулок и лопастей упомянутых ДСЛК при соответствующем их складывании и их несущих поверхностей, уменьшающем в 5,3-5,6 раза походную площадь от взлетной их площади, при этом в упомянутых ОПСВ и ДПСВ между хвостовых балок имеется профилированная концевая часть, снизу которой и под задней кромкой вдоль оси симметрии размещен обтекатель, имеющий на его конце отсек с выдвижной штангой магнитометра и в нижнем его отсеке с открываемыми створками опускаемую лебедкой и буксируемую на тросе под водой антенну гидроакустической станции при барражирующем его полете, причем упомянутые ОПСВ и ДПСВ в полетной конфигурации автожира с авторотирующими ДНВ при корабельном их базировании, несущими авиационные противолодочные и противокорабельные ракеты (АПР и ПКР), обеспечивают соответствующую борьбу с подводной лодкой (ПЛ) и надводным кораблем (НК), при этом в упомянутых ОПСВ и ДПСВ опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на АКН для обработки в реальном масштабе времени, и высокочувствительным магнитометром, имеющим магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и связанным с БСУ в упомянутых ОПСВ и ДПСВ, предусматривающей выдачу команд на включение в расчетной точке магнитометра и на управление после срабатывания магнитометра при обнаружении ПЛ-цели, но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на АКН и его КП, причем в упомянутых ОПСВ и ДПСВ упомянутая их БСУ имеет как радиоканал закрытой связи с АКН, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ПЛ-цели, идентификации ее и принятие подтвержденного решения от оператора АКН об уничтожении им выбранных, но и возможность их транспортирования в ангаре АКН и походной их конфигурации со сложенными консолями упомянутых ПСК и ЗСК, килей V-образного оперения и лопастей ДНВ, причем при воздушном базировании упомянутых ДПСВ на палубном ИН типа Су-57, перемещающим на подвесной консоли подфюзеляжного или подкрыльных ПУ, например, один или два ДПСВ с большими сторонами плоских его или их боковых воздухозаборников, выполненных, открывая/закрывая их вход, отклоняемыми вверх/вниз к пластинчатым отсекателям, имеет сложенные упомянутые ПСК, ЗСК и ДНВ, а в бомбоотсеке две ПКР Х-38М и возможность пуска ПКР с подвешенного состояния ДПСВ на ИН, отстыковывания, но и запуска ДПСВ с ИН для создания буферной безопасной авиазоны между ИН и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М с 40 до 400 км, при этом радаром типа Н036 [4] с ИН обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ИН, используя маловысотный профиль полета и систему самообороны -станцию активных электронных помех, причем при достижении области, из которой будет поражена НК-цель, каждый упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1155 км автоматически возвращается на АКН с вертикальной на его вертолетную площадку посадкой, при этом в упомянутых ОПСВ и ДПСВ планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, фюзеляж которого снизу снабжен упомянутыми ПУ вооружения в бомбоотсеках, имеющих по две автоматические створки с пилообразными поперечными их сторонами, а БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, размещенные бок о бок и срабатывающие на режимах ВВП и зависания поочередно только после отстрела лопастей ДНВ, которые крепятся на валу посредством пиропатронов, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного, а другой - управляется вторым пилотом с головного ОПСВ, а затем и наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете.
Кроме того, в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с один или несколькими датчиками, включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения ведущего ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей упомянутый следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ведущего ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование упомянутого следящего полета ведомым ДПСВ через компьютер управления полетом.
Кроме того, для барражирующего экономичного скоростного горизонтального полета упомянутых ОПСВ и ДПСВ каждый ДНВ в синхронно-сбалансированной несущей и авторотирующуей системе, включающей в упомянутом главном редукторе автоматическую коробку передач, имеющую для привода ДНВ выходные упомянутые соосные валы, каждый из которых создает по два потока: первый - взлетный с выдачей соответствующей мощности от упомянутого КГтД и созданием подъемной тяги от ДНВ, второй - крейсерский в конфигурации автожира с приемом мощности от авторотации каждого ДНВ на ее соответствующую ступень, отключающую оба ДНВ от привода ССТ упомянутого КГтД, приводящую генератор и управляющую синхронным снижением и скорости их вращения, например, до 200 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ДНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы упомянутых ПСК и ЗСК, но и плоскостью вращения лопастей ДНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ДНВ на 12-15% от общего сопротивления профиля лопастей ДНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых ПСК и ЗСК с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного реактивного самолета.
Кроме того, для высокоскоростного горизонтального полета упомянутых ОПСВ и ДПСВ, достигая маршевой тяговоуроженности с 0,3 до 0,363, используется мощность их СУ с 54% до 72% от работающего упомянутого КГтД только на привод упомянутого ВОВ в конфигурации упомянутого реактивного самолета-триплана с ПРС-R1, упомянутая СРРК которого, имея по передней ее кромке стреловидность с углом χ=+23° или χ=+26°, обеспечивает на высоте 11 км скорость полета 0,725 Маха (М) или 0,753 М, а при достижении маршевой тяговоуроженности до 0,45 скорость полета при пикировании повышается до M=0,786 или М=0,87 соответственно.
Благодаря наличию этих признаков, которые позволят освоить палубный авиационный ударный комплекс (ПАУК), который включает группу аппаратов вертикального взлета и посадки корабельного или воздушного базирования, в состав первого или второго входит соответственно один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ) или только более чем один ДПСВ, используемые с вертолетной площадки авианесущего корабля-носителя (АКН) или с ПУ истребителя-носителя (ИН), причем каждый ОПСВ и ДПСВ снабжен в двухвинтовой соосно-несущей схеме (ДСНС) на пилоне фюзеляжа двухлопастными несущими винтами (ДНВ), создающими в ДСНС-Х2 вертикальную тягу только на переходных режимах полета и при вертикальном и коротком взлете/посадке (ВВП и КВП) и, по меньшей мере, одним комбинированным газотурбинным двигателем (КГтД), выполненным в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) и, по меньшей мере, с одной свободной силовой турбиной (ССТ), передающей взлетную мощность силовой установки (СУ) посредством системы трансмиссии на ДНВ в симметрично-сбалансированной ДСНС-Х2 и/или один ВОВ, имеющий лопатки с большой их круткой, работающий по тянущей схеме для создания в пропульсивно-реактивной системе (ПРС-R1) реактивной тяги, направленной горизонтально назад и по оси симметрии при выполнении КВП и на переходных режимах полета или горизонтальном поступательном полете, и в схеме тандем передним и задним стреловидными крыльями (ПСК и ЗСК), имеющими среднее и высокое расположение соответственно на фюзеляже и на законцовках V-образного хвостового оперения, снабженного рулями направления, и выполнен как возвращаемым на АКН, так и с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета с ДСНС-Х2 и ПРС-R1 в соответствующие реактивные крылатый автожир для барражирующего полета или самолет-триплан при максимальном или нормальном взлетном весе соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или в качестве несущих их дупланных стреловидных лопастей-крыльев (ДСЛК) после трансформации ДНВ, выполняемой последовательно, когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их лопасти как предварительно размещены перпендикулярно к передней кромке соответствующих консолей ПСК и ЗСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 90° в горизонтальной плоскости наружу от центра масс так, что две верхние и две нижние из них фиксируются соответственно с прямой стреловидностью по передним кромкам ДСЛК ДНВ, образующих с соответствующими консолями ПСК и ЗСК равновеликую стреловидность χ=+23° или χ=+26°, организующих относительно оси симметрии синхронно-зафиксированные разно-уровневые их ДСЛК, передние кромки которых размещены в плане параллельно передним кромкам ПСК и ЗСК в полетной конфигурации самолета-триплана с ПРС-R1 и системой разнесенных разно-уровневых крыльев (СРРК), преобразующей при удельной нагрузке на мощность ρN=2,15 кг/л.с. и большом удлинением ПСК и ЗСК λ=9,9/5,6 с соответствующей их стреловидностью схему тандем в аэродинамическую схему продольного триплана, включающую ПСК и ЗСК совместно с зафиксированными ДСЛК верхнего и нижнего ДНВ, размещенными в плане между консолей ПСК и ЗСК, но и обратно, при этом в системе трансмиссии, например, один КГтД с кольцевым обтекателем ВОВ размещен за центром масс в кормовой гондоле, в которой между ВОВ и ССТ смонтирован соосно с двумя последними промежуточный редуктор, имеющий продольный по его оси и входной вал от ССТ, но и выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соответствующий входной вал соосного редуктора ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (α), который равновелик или равен 1/2 величине угла (αкр) атаки ЗСК или ПСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных их ДСЛК, выполняющих с ПСК и ЗСК в СРРК роль высокорасположенных разрезных крыльев, при этом на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДСНС-Х2 от работающих ДНВ, выполненных с жестким креплением их лопастей, создается противоположным направлением вращения верхнего и нижнего ДНВ соответственно, например, по часовой и против часовой стрелки или против часовой и по часовой стрелки. Все это позволит в ОПСВ и ДПСВ с ПСК и ЗСК при переходных маневрах уменьшить нагрузку на ДНВ и упростить систему трансмиссии при размещении КГтД с ССТ и ВОВ в в кормовой гондоле фюзеляжа. В крейсерском полете в конфигурации реактивных автожира и самолета-триплана с симметрично-сбалансированной соответственно авторотирующей и несущей системах, первая из которых включает многоскоростную автоматическую коробку передач, управляющую как снижением скорости вращения ДНВ до 200 мин-1 или 100 мин-1, так и углом атаки лопастей ДНВ, но и плоскостью их вращения, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета. Что приводит к возможности расчета его ПСК и ЗСК на крейсерский полет с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного самолета при уменьшении вращательного сопротивления ДНВ на 15% от общего сопротивления (cxSΣ), составляющего, например, для ДПСВ-1,0 cxSΣ=0,941 м2, что позволит в сравнении с конвертопланом UAV "V-247 "Vigilant" и его ЦН=1100 кг после выполнения короткого/вертикального взлета увеличить на высоте полета 11 км скорость в 1,061/1,61 раза, дальность полета в 2,28/1,59 раза при горизонтальном полете со скоростью 550/770 км/ч в конфигурации реактивных автожира/самолета-триплана, но и достичь в последней в конфигурации скорость пикирующего полета 835…924 км/ч.
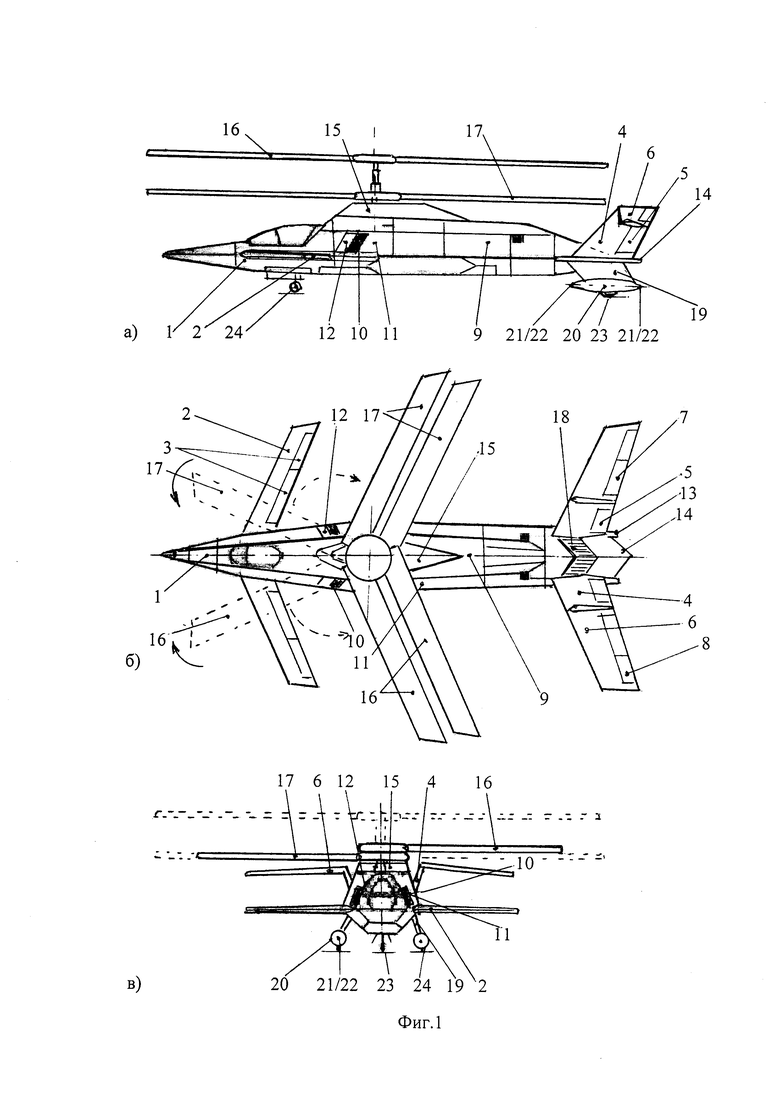
Предлагаемое изобретение ПАУК с ОПСВ и ДПСВ, их тандемными ПСК, ЗСК и стреловидностью χ=+26°, ДНВ в ДСНС-Х2 и КГтД с ВОВ в ПРС-R1, приводящим два ДНВ или один ВОВ, размещенным между килей V-образного оперения, иллюстрируется ДПСВ на фиг. 1 и общих видах сбоку, сверху и спереди соответственно а), б) и в):
а) в полетной конфигурации винтокрыла КВП с тандемными ПСК и ЗСК, одним ТВаД, приводящим через систему трансмиссии ДНВ в ДСНС-Х2 и ВОВ в ПРС-R1;
б) в полетной конфигурации вертолета с шрокохордовыми ДНВ, лопасти верхнего и нижнего из них вращаются по часовой и против часовой стрелки, лопасти соосных ДНВ показаны пунктиром и с условным размещением зафиксированных верхних и нижних их ДСЛК и стреловидностью χ=+26° в конфигурации самолета-триплана для высокоскоростного полета и при выполнении взлетно-посадочных режимов;
в) в полетной конфигурации реактивных автожира или самолета-триплана с ПСК и ЗСК, создающими большую подъемную силу, чем подъемная сила, создаваемая авторотирующими ДНВ или зафиксированными их ДСЛК, и одним ВОВ, создающим маршевую тягу в ПРС-R1 скоростного или трансзвукового полета с условным размещением пунктиром авторотирующих ДНВ или зафиксированных их ДСЛК.
Многоцелевой ПАУК корабельного базирования с ОПСВ и двумя ДПСВ представлен на фиг. 1 один ДПСВ, выполненный по концепции ДСНС-Х2 и технологии ПРС-R1, имеет планер из алюминиевых сплавов и композитного углепластика, фюзеляж 1, высокорасположенное ПСК 2, имеющее по всему размаху закрылки 3. Стреловидные кили 4 с рулями направления 5 V-образного оперения снабжены на их законцовках, образую при виде спереди конфигурацию типа чайка, двумя внешними консолями ЗСК 6, имеющими внутренние закрылки 7 и внешние элевоны 8. Кили 4 и внешние консоли ЗСК 6 смонтированы при виде спереди соответственно наружу от плоскости симметрии и от изломов наклонно вниз. Кормовая гондола 9 с кольцевым обтекателем ВОВ и ССТ в КГтД (на фиг. 1 не показано). Большие стороны 10 плоских боковых воздухозаборников 11 выполнены, открывая/закрывая их вход, отклоняемыми вверх/вниз к пластинчатым отсекателям 12. Стреловидные кили 4 V-образного оперения смонтированы по внешним бортам хвостовой балки 13, имеющей профилированную концевую часть с задней кромкой 14. На фюзеляже 1 смонтирован пилон 15 с верхними 16 и нижним 17 ДНВ, имеющими для полной компенсации реактивного крутящего момента на режимах ВВП и зависания противоположное их вращение соответственно по часовой стрелки и против часовой(см. фиг. 16), выполнены с жестким креплением их лопастей и автоматом перекоса на нижнем 17 из них соосных ДНВ.
В комбинированной СУ один КГтД имеет внешний и внутренний контуры соответственно с ВОВ в ПРС-R1 и ССТ, выполнен с передним выводом вала для отбора мощности от ССТ и возможностью передачи мощности от него на промежуточный и главный редукторы (на фиг. 1 не показаны), который плавно перераспределяет 50% и 50% или 72% и 100% от взлетной мощности СУ соответственно при выполнении ВВП и зависания между двумя ДНВ 16-17 в ДСНС-Х2 или при трансзвуковом крейсерском полете на один ВОВ от ССТ, имеющей между килей 4 на конце кормовой гондолы 9 плоское реактивное сопло 18 со скошенной в плане задней кромкой, размещенной параллельно V-образной в плане задней кромке 14 профилированной концевой части. Трапециевидные подфюзеляжные кили 19, смонтированные при виде спереди наружу, снабжены на их законцовках обтекателями 20, имеющими спереди и сзади на их концах соответствующие ИК-излучатели 21 и тепловые камеры 22, а снизу - не убираемые колеса 23 шасси с амортизируемыми главными опорами, работающими совместно с убираемой носовой опорой колеса 24 (см. фиг. 1а).
Управление ДПСВ обеспечивается циклическим, общим и дифференциальным изменением шага соосных ДНВ 16-17 и отклонением рулей направления 5 и элевонов 8. При крейсерском скоростном или высокоскоростном полете в конфигурации реактивных автожира или самолета-трипална подъемная сила создается соответственно авторотирующими ДНВ 16-17 с тандемными ПСК 2 и ЗСК 6 или ПСК 2 и ЗСК 6 с зафиксированными ДЛКАИС 16-17 ДНВ (см. фиг. 1б) в СРРК, маршевая реактивная тяга - ВОВ в ПРС-R1 через реактивное плоское сопло 18, на режиме перехода - ПСК 2 и ЗСК 6 с ДНВ 16-17. После создания подъемной тяги ДНВ 16-17 в ДСНС-Х2 обеспечиваются режимы ВВП и зависания или КВП при создании плоским соплом 18 реактивной тяги (см. рис. la). При выполнении ВВП и зависания изменение балансировки по курсу и тангажу, крену обеспечивается дифференциальным изменением тяги общего шага ДНВ 16-17 и изменением соответствующего циклического шага посредством автомата перекоса нижнего 17 ДНВ соответственно (см. рис. 1б). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ДНВ 16-17. По мере разгона с ростом подъемной силы ПСК 2 и ЗСК 6 подъемная сила ДНВ 16-17 уменьшается. При достижении скоростей полета 450…500 км/ч и для перехода на самолетный режим полета ДНВ 16-17 синхронно останавливаются так, что их лопасти предварительно размещены при виде сверху перпендикулярно передней кромке ПСК 2 и ЗСК 6 и снабжены автоматическими узлами складывания их лопастей, которые затем синхронно поворачивают наружу от оси симметрии лопасти-крылья ДНВ 16-17 на угол 90° так, что их ДЛКАИС зафиксированы с прямой стреловидностью по передним их кромкам, образуя равновеликую стреловидность χ=+26° с ПСК 2 и ЗСК 6 в СРРК (см. фиг. 1б). При создании реактивной тяги плоским соплом 18 производится трансзвуковой крейсерский полет ДПСВ, при котором путевое управление обеспечивается рулями направления 5 на килях 4. Поперечное и продольное управление осуществляется синфазным и дифференциальным отклонением элевонов 8 соответственно с функциями элеронов и рулей высоты на ЗСК 6.
Таким образом, трансзвуковой ОПСВ и ДПСВ с тандемными ПСК и ЗСК, V-образным оперением, имеющий для создания горизонтальной тяги в комбинированной СУ один КГтД с ВОВ в ПРС-R1 и вертикальной тяги в ДСНС-Х2 два ДНВ или подъемной силы соответственно с работающими ДНВ или зафиксированными их ДСЛК, представляет собой конвертоплан с ДСНС-Х2, изменяющий свою полетную конфигурацию только благодаря изменению условий работы и трансформации ДНВ посредством того, что набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно передние кромки наступающих лопастей ДНВ и зафиксированных их ДСЛК, увеличивающих несущую способность ПСК и ЗСК в конфигурации реактивного самолета-триплана. Консоли тандемных ПСК и ЗСК увеличивают показатели аэродинамических и структурных преимуществ при преобразовании в трансзвуковой самолет-триплан с СРРК, особенно, с наличием дополнительных ДСЛК соосных ДНВ, зафиксированных над центром масс со стреловидностью χ=+26° соответственно между левых и правых консолей ПСК и ЗСК с такой же стреловидностью. Это позволит уменьшить вес планера ДПСВ, выполненного по малозаметной технологии с радиопоглощающими материалами, увеличить взлетный вес на 17% либо дальность полета на 29% при сохранении взлетного веса и обеспечить выполнение разведывательно-ударных операций в конфигурации крылатого автожира со скоростью 550 км/ч. Авиационная группа в составе ПАУК, включающая ОПСВ с двумя ДПСВ, используемыми с вертолетной площадки АКН, несущими в группе ОПСВ/ ДПСВ по 6/2 штук АПР-ЗМЭ или ПКР типа Х-35УЭ и головным ОПСВ, который полностью оцифрован с использованием новейших технологий, включая и совместное использование пилотируемых и беспилотных летательных аппаратов, так называемое manned and unmanned teaming (MUM-T), которое позволяет пилотам ОПСВ контролировать траекторию полета группы ведомых ДПСВ и их боевые нагрузки, обеспечивающие противолодочную или противокорабельную и/или противовоздушную оборону. Четвертый уровень MUM-T позволяет пилотам ОПСВ не только получать реальные сенсорные изображения с группы ДПСВ и управлять сенсорными и оружейными нагрузками, но и их навигацией и глобальным позиционированием.
Несомненно, широкое применение в комбинированной СУ одного КГтД с ВОВ, в конструкции которого, используя турбины от ТРДД мод. Д-30ДКП, позволит освоить семейство трансзвуковых ОПСВ и ДПСВ (см. табл. 1) для многоцелевых ПАУК, базируемых на АНК и палубном ИН, повышающих их боевую устойчивость и безопасность, создающих буферную авиазону между ПВО НК-цели и АНК или его ИН.
Литература:
1. Адрес и интернете: http://www.wikiwand.com/en/Sikorsky_XV-2
2. Адрес в интернете: http://www.airwar.ru/enc/xplane/s72.html
3. Адрес в интернете: http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml
4. Адрес в интернете: https://www.nasha-strana.info/archives/25587
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ САМОЛЕТОМ-ВЕРТОЛЕТОМ | 2018 |
|
RU2710317C1 |
Изобретение относится к области авиации, в частности к авиационным ударным комплексам. Авиационный ударный ракетный комплекс включает группу аппаратов вертикального взлета и посадки корабельного или воздушного базирования, в состав которых входит соответственно один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ). Каждый аппарат выполнен с тандемными стреловидными крыльями, имеет на пилоне фюзеляжа два двухлопастных несущих винта (ДНВ) и в кормовой гондоле свободную силовую турбину, приводящую ДНВ и выносной турбовентилятор, создающие подъемную силу и реактивную маршевую тягу с работающими/авторотирующими соосными ДНВ или зафиксированными над центром масс их дупланными стреловидными лопастями-крыльями при горизонтальном полете в конфигурации реактивных винтокрыла/автожира или самолета-триплана. Аппараты выполнены преобразуемыми после посадки в походную конфигурацию посредством складывания лопастей ДНВ, консолей крыльев и килей V-образного оперения для корабельного и воздушного базирования. Обеспечивается увеличение вероятности поражения надводной, подводной и воздушной цели, расположенной на большой дальности, многократность применения. 4 з.п. ф-лы, 1 ил., 1 табл.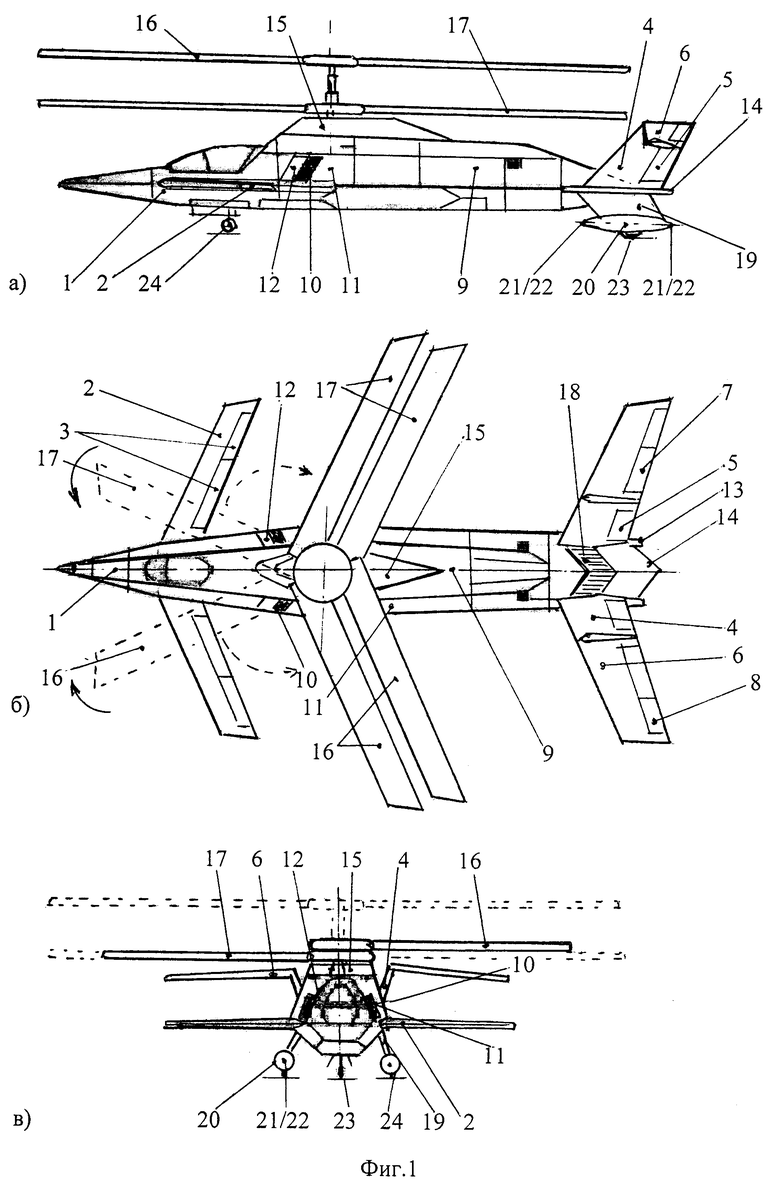
1. Авиационный ударный ракетный комплекс, содержащий летательный аппарат, имеющий крыло, хвостовое оперение, двигатель, бортовую систему управления (БСУ), обеспечивающую телемеханическое управление (ТМУ) с командного пункта (КП), отличающийся тем, что он включает группу аппаратов вертикального взлета и посадки корабельного или воздушного базирования, в состав первого или второго входит соответственно один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одним дистанционно пилотируемым самолетом-вертолетом (ДПСВ) или только более чем один ДПСВ, используемые с вертолетной площадки авианесущего корабля-носителя (АКН) или с ПУ истребителя-носителя (ИН), причем каждый ОПСВ и ДПСВ снабжен в двухвинтовой соосно-несущей схеме (ДСНС) на пилоне фюзеляжа двухлопастными несущими винтами (ДНВ), создающими в ДСНС-Х2 вертикальную тягу только на переходных режимах полета и при вертикальном и коротком взлете/посадке (ВВП и КВП), и по меньшей мере одним комбинированным газотурбинным двигателем (КГтД), выполненным в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) и по меньшей мере с одной свободной силовой турбиной (ССТ), передающей взлетную мощность силовой установки (СУ) посредством системы трансмиссии на ДНВ в симметрично-сбалансированной ДСНС-Х2 и/или один ВОВ, имеющий лопатки с большой их круткой, работающий по тянущей схеме для создания в пропульсивно-реактивной системе (ПРС-R1) реактивной тяги, направленной горизонтально и по оси симметрии при выполнении КВП и на переходных режимах полета или горизонтальном поступательном полете, и в схеме тандем передним и задним стреловидными крыльями (ПСК и ЗСК), имеющими среднее и высокое расположение соответственно на фюзеляже и на законцовках V-образного хвостового оперения, снабженного рулями направления, и выполнен как возвращаемым на АКН, так и с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета с ДСНС-Х2 и ПРС-R1 в соответствующие реактивные крылатый автожир для барражирующего полета или самолет-триплан при максимальном или нормальном взлетном весе соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или в качестве несущих их дупланных стреловидных лопастей-крыльев (ДСЛК) после трансформации ДНВ, выполняемой последовательно, когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их лопасти как предварительно размещены перпендикулярно к передней кромке соответствующих консолей ПСК и ЗСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 90° в горизонтальной плоскости наружу от центра масс так, что две верхние и две нижние из них фиксируются соответственно с прямой стреловидностью по передним кромкам ДСЛК ДНВ, образующих с соответствующими консолями ПСК и ЗСК равновеликую стреловидность χ=+23° или χ=+26°, организующих относительно оси симметрии синхронно зафиксированные разноуровневые их ДСЛК, передние кромки которых размещены в плане параллельно передним кромкам ПСК и ЗСК в полетной конфигурации самолета-триплана с ПРС-R1 и системой разнесенных разноуровневых крыльев (СРРК), преобразующей при удельной нагрузке на мощность ρN=2,15 кг/л.с. и большом удлинением ПСК и ЗСК λ=9,9/5,6 с соответствующей их стреловидностью схему тандем в аэродинамическую схему продольного триплана, включающую ПСК и ЗСК совместно с зафиксированными ДСЛК верхнего и нижнего ДНВ, размещенными в плане между консолей ПСК и ЗСК, но и обратно, при этом в системе трансмиссии, например, один КГтД с кольцевым обтекателем ВОВ размещен за центром масс в кормовой гондоле, в которой между ВОВ и ССТ смонтирован соосно с двумя последними промежуточный редуктор, имеющий продольный по его оси и входной вал от ССТ, но и выходные внешний и внутренний соосные валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй продлен за ВОВ и передает через муфту сцепления крутящий момент на соответствующий входной вал соосного редуктора ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (α), который равновелик или равен 1/2 величине угла (αкр) атаки ЗСК или ПСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных их ДСЛК, выполняющих с ПСК и ЗСК в СРРК роль высокорасположенных разрезных крыльев, при этом на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДСНС-Х2 от работающих ДНВ, выполненных с жестким креплением их лопастей, создается противоположным направлением вращения верхнего и нижнего ДНВ соответственно, например, по часовой и против часовой стрелки или против часовой и по часовой стрелки.
2. Палубный авиационный ударный комплекс по п. 1, отличающийся тем, что в упомянутых ОПСВ и ДПСВ при выполнении технологии КВП в конфигурации винтокрыла или крылатого автожира с упомянутыми ПСК и ЗСК, снабженными по всему их размаху соответственно закрылками и закрылками с элевонами, имеют равновеликий их размах, который в 1,69 раза меньше диметра (D) ДНВ, а изменение балансировки по тангажу, крену и курсу при их управлении обеспечивается изменением соответствующего циклического шага посредством автомата перекоса нижнего ДНВ и дифференциальным изменением тяги общего шага упомянутых ДНВ соответственно, а скошенные их боковые стороны каждого фюзеляжа в соответствующих его носовой, центральной и кормовой частях, включая и мотогондолу с ее плоским соплом, уменьшая эффективную площадь рассеивания, образуют при виде спереди пятигранное или шестигранное поперечное сечение, но и среднюю часть фюзеляжа граненной конфигурации с острой средней линией, непрерывно распространяющейся от носа до хвоста, а их упомянутые кили V-образного оперения и внешние консоли ЗСК, имея равновеликую соответствующую стреловидность, образуя их совместную конфигурацию типа чайка, смонтированы при виде спереди соответственно по внешним бортам хвостовых балок наружу под углом 10° от плоскости симметрии и от изломов в конфигурации типа чайка горизонтально или наклонно вниз, а их упомянутые ПСК и ЗСК, имеющие при соотношении их площадей соответственно 36,0% и 64,0% от общей их площади, которая в свою очередь составляет 34,68-39,6% от суммы площадей двух ПСК и ЗСК с ДСЛК двух ДНВ, но и в свою очередь большую площадь двух последних, составляющую 53,1-65,57% от площади двух ПСК и ЗСК, при этом в упомянутых ОПСВ и ДПСВ трапециевидные подфюзеляжные кили, смонтированные при виде спереди наружу, снабжены на их законцовках обтекателями, имеющими спереди и сзади на их концах соответствующие инфракрасные (ИК) излучатели и тепловые камеры, а снизу не убираемые колеса шасси с амортизируемыми главными опорами, работающими с носовой убираемой вспомогательной опорой переднего колеса, причем в упомянутых ОПСВ и ДПСВ между хвостовых балок имеется профилированная концевая часть, которая интегрирована между хвостовых балок, имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно скошенной в упомянутом КГтД задней кромке его плоского сопла, имеющего термопоглощающее покрытие, уменьшающее ИК-заметность, при этом после вертикальной посадки упомянутых ОПСВ и ДПСВ корабельного или воздушного базирования ДПСВ на вертолетную площадку или палубу АКН в конвертируемой системе несущих их поверхностей имеется возможность как синхронного укладывания в соответствующие боковые отсеки фюзеляжа, снабженные открываемыми створками, консолей ПСК посредством поворачивания в горизонтальной плоскости его консолей назад по полету на узлах поворота, размещенных в корневых частях возле передней кромки ПСК, смонтированных по обе стороны от оси симметрии, так и поочередного складывания килей V-образного оперения и консолей ЗСК соответственно во внутрь к плоскости симметрии и обратно вниз, размещаясь при этом в соответствующих кормовых утонченностях фюзеляжа и вдоль боковых его сторон, высота которых, включая высоту пилона и втулок ДНВ, равновелика размаху соответствующих сложенных килей V-образного оперения и консолей ЗСК, но и втягивания в соосной колонке валов упомянутых ДНВ внутреннего телескопического верхнего вала при предварительно сложенных лопастях ДНВ в упомянутые ДСЛК, размещенные их двумя верхними над двумя нижними лопастями, зафиксированы с их законцовками, направленными назад по полету и не выходящими за кормовую часть фюзеляжа, причем при корабельном или воздушном базировании упомянутых ОПСВ с ДПСВ в походно-транспортной на шасси или ДПСВ с убранным шасси в полетно-транспортной конфигурации соответственно без верхнего или с верхним сбрасываемым обтекателем колонки валов, втулок и лопастей упомянутых ДСЛК при соответствующем их складывании и их несущих поверхностей, уменьшающем в 5,3-5,6 раза походную площадь от взлетной их площади, при этом в упомянутых ОПСВ и ДПСВ между хвостовых балок имеется профилированная концевая часть, снизу которой и под задней кромкой вдоль оси симметрии размещен обтекатель, имеющий на его конце отсек с выдвижной штангой магнитометра и в нижнем его отсеке с открываемыми створками опускаемую лебедкой и буксируемую на тросе под водой антенну гидроакустической станции при барражирующем его полете, причем упомянутые ОПСВ и ДПСВ в полетной конфигурации автожира с авторотирующими ДНВ при корабельном их базировании, несущими авиационные противолодочные и противокорабельные ракеты (АПР и ПКР), обеспечивают соответствующую борьбу с подводной лодкой (ПЛ) и надводным кораблем (НК), при этом в упомянутых ОПСВ и ДПСВ опускаемая гидроакустическая система, состоящая из индикатора акустических сигналов и двух приемников для их приема от гидроакустической антенны, их кодирования и передачи по восьмиканальной закрытой связи на АКН для обработки в реальном масштабе времени, и высокочувствительным магнитометром, имеющим магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и связанным с БСУ в упомянутых ОПСВ и ДПСВ, предусматривающей выдачу команд на включение в расчетной точке магнитометра и на управление после срабатывания магнитометра при обнаружении ПЛ-цели, но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на АКН и его КП, причем в упомянутых ОПСВ и ДПСВ упомянутая их БСУ имеет как радиоканал закрытой связи с АКН, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ПЛ-цели, идентификации ее и принятие подтвержденного решения от оператора АКН об уничтожении им выбранных, но и возможность их транспортирования в ангаре АКН и походной их конфигурации со сложенными консолями упомянутых ПСК и ЗСК, килей V-образного оперения и лопастей ДНВ, причем при воздушном базировании упомянутых ДПСВ на палубном ИН типа Су-57, перемещающим на подвесной консоли подфюзеляжного или подкрыльных ПУ, например, один или два ДПСВ с большими сторонами плоских его или их боковых воздухозаборников, выполненных, открывая/закрывая их вход, отклоняемыми вверх/вниз к пластинчатым отсекателям, имеет сложенные упомянутые ПСК, ЗСК и ДНВ, а в бомбоотсеке две ПКР Х-38М и возможность пуска ПКР с подвешенного состояния ДПСВ на ИН, отстыковывания, но и запуска ДПСВ с ИН для создания буферной безопасной авиазоны между ИН и ПВО НК-цели, увеличивающей радиус действия ПКР Х-38М с 40 до 400 км, при этом радаром типа Н036 [4] с ИН обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ИН, используя маловысотный профиль полета и систему самообороны - станцию активных электронных помех, причем при достижении области, из которой будет поражена НК-цель, каждый упомянутый ДПСВ произведет залп или поочередный запуск ПКР с коррекцией ошибки, накопленной комбинированной инерциальной системой управления по данным приемника сигналов спутниковой навигационной системы ГЛОНАСС, на конечном участке полета ПКР используется ИК-головка ее самонаведения и программно-аппаратные средства автономного распознавания целей, затем ДПСВ на удалении 1155 км автоматически возвращается на АКН с вертикальной на его вертолетную площадку посадкой, при этом в упомянутых ОПСВ и ДПСВ планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, фюзеляж которого снизу снабжен упомянутыми ПУ вооружения в бомбоотсеках, имеющих по две автоматические створки с пилообразными поперечными их сторонами, а БСУ ОПСВ снабжена возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, размещенные бок о бок и срабатывающие на режимах ВВП и зависания поочередно только после отстрела лопастей ДНВ, которые крепятся на валу посредством пиропатронов, но и его использования в составе авиационной группы в качестве головного совместно с упомянутыми двумя ДПСВ, один из которых, являясь ведомым, автоматически повторяет в следящем полете маневры головного, а другой управляется вторым пилотом с головного ОПСВ, а затем и наоборот, при этом система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы определить относительную позицию между ведомым ДПСВ и головным ОПСВ, сравнить относительную позицию с выбранной относительной позицией, определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение, преобразовывать скорость следящего устройства во входы управления полетом, ограничивать прямое перемещение ведомого ДПСВ относительно головного ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете.
3. Палубный авиационный ударный комплекс по п. 2, отличающийся тем, что в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с один или несколькими датчиками включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения ведущего ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей упомянутый следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ведущего ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование упомянутого следящего полета ведомым ДПСВ через компьютер управления полетом.
4. Палубный авиационный ударный комплекс по любому из пп. 1, 2, отличающийся тем, что для барражирующего экономичного скоростного горизонтального полета упомянутых ОПСВ и ДПСВ каждый ДНВ в синхронно-сбалансированной несущей и авторотирующуей системе, включающей в упомянутом главном редукторе автоматическую коробку передач, имеющую для привода ДНВ выходные упомянутые соосные валы, каждый из которых создает по два потока: первый - взлетный с выдачей соответствующей мощности от упомянутого КГтД и созданием подъемной тяги от ДНВ, второй - крейсерский в конфигурации автожира с приемом мощности от авторотации каждого ДНВ на ее соответствующую ступень, отключающую оба ДНВ от привода ССТ упомянутого КГтД, приводящую генератор и управляющую синхронным снижением и скорости их вращения, например, до 200 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ДНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы упомянутых ПСК и ЗСК, но и плоскостью вращения лопастей ДНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ДНВ на 12-15% от общего сопротивления профиля лопастей ДНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых ПСК и ЗСК с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного реактивного самолета.
5. Палубный авиационный ударный комплекс по любому из пп. 1, 2, отличающийся тем, что для высокоскоростного горизонтального полета упомянутых ОПСВ и ДПСВ, достигая маршевой тяговоуроженности с 0,3 до 0,363, используется мощность их СУ с 54% до 72% от работающего упомянутого КГтД только на привод упомянутого ВОВ в конфигурации упомянутого реактивного самолета-триплана с ПРС-R1, упомянутая СРРК которого, имея по передней ее кромке стреловидность с углом χ=+23° или χ=+26°, обеспечивает на высоте 11 км скорость полета 0,725 Маха (М) или 0,753 М, а при достижении маршевой тяговоуроженности до 0,45 скорость полета при пикировании повышается до М=0,786 или М=0,87 соответственно.
| РАКЕТА-НОСИТЕЛЬ, СБРАСЫВАЕМАЯ С САМОЛЕТА-НОСИТЕЛЯ, И СПОСОБ ЕЕ ЗАПУСКА В ВОЗДУХЕ И УПРАВЛЕНИЕ ПОЛЕТОМ | 1989 |
|
RU2026798C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ | 2013 |
|
RU2534476C1 |
| US 20080035786 A1, 14.02.2008 | |||
| US 20180215464 A1, 02.08.2018. | |||

