Изобретение относится к устройствам для проведения погрузочно-разгрузочных работ, а именно к погрузочно-разгрузочному модулю, включающему грузоподъемное устройство в виде беспилотного крана карусельного типа и скоростную транспортную систему подвесного типа, взаимодействующие с системами дистанционного управления движением и перемещением груза многофункционального центра управления.
Известен подъемный кран, предназначенный для перемещения контейнеров на судно или с него, пришвартованное к пристани и осуществляющее загрузку или разгрузку соседних контейнерных трюмов контейнеровоза (RU №2622162 С2, B65G 67/60, 13.06.2017).
Известна подвесная транспортная система, используемая в навесных монорельсовых транспортных средствах с заданной траекторией движения, предназначенная для пассажирских и грузовых перевозок (RU №2600486 С1, В61В 3/02, Е01В 25/22, 20.10.2016).
Известна система терминала для разгрузки груза или загрузки груза посредством кранов (RU №2384510 С2, B65G 63/00, B65G 67/60, 20.03.2010).
Известно грузоподъемное оборудование, используемое при разгрузке и/или загрузке грузов с помощью кранов, объединенных в комплекс (RU №2426685 C1, B65G 67/60, B65G 63/00, 20.08.2011).
В известных системах и устройствах решений, которые могли бы быть охарактеризованы совокупностью признаков, тождественных признакам заявленного изобретения, не обнаружено.
Известна скоростная транспортная система навесного типа, содержащая транспортное средство в виде беспилотных кабин с автономными информационными центрами, систему управления движением, информационный центр с главным компьютером, магистраль одностороннего движения с переменными по длине, кривизне и градиенту участками и с двумя ярусами в виде арок из связующих балок с направляющими, управляемыми системой управления движением и связанной с главным компьютером, парковочное полотно, несущие путевые конструкции (RU №35615 U1, В61В 3/02, 27.01.2004).
Известен универсальный транспортно-логистический комплекс, включающий скоростную транспортную систему подвесного типа, содержащую магистральную систему, состоящую из магистральных полотен с градиентными участками, выполненную с односторонним кольцевым движением, и многофункциональный центр управления движением (RU №2655589 C1, В61В 1/00, В61В 3/02, В61В 5/00, Е01В 25/00, 28.05.2018).
Данное техническое решение принято в качестве ближайшего аналога настоящего изобретения.
В ближайшем аналоге представлен новый комплекс на основе скоростной транспортной системы подвесного типа с высокими эксплуатационными возможностями и с надежной и высокой ее технологичностью, содержащий многофункциональный центр управления движением и парк транспортных средств.
Ближайший аналог относится к области наземного высокоскоростного транспорта и предназначен для быстрой перевозки пассажиров и/или грузов с помощью индивидуальных интеллектуальных средств.
Устройства грузоподъемного для подъема груза в новом качестве для последующего + его движении в ближайшем аналоге не предусмотрено.
В основу настоящего изобретения положено решение задачи, позволяющей увеличить производительность и скорость погрузочно-разгрузочных работ, повысить качество модуля и его эксплуатации, обеспечить надежное и дистанционное управление движением и перемещением груза.
Технический результат настоящего изобретения заключается в повышении производительности, скорости и качества погрузочно-разгрузочных работ, в снижении количества оборудования модуля с упрощением и удешевлением его, в обеспечении универсальности и экологичности, в расширении возможности использования модуля.
Согласно изобретению эта задача решается за счет того, что универсальный автоматизированный погрузочно-разгрузочный модуль включает скоростную транспортную систему подвесного типа. Скоростная транспортная система подвесного типа содержит магистральную систему. Магистральная система состоит из магистральных полотен с градиентными участками и выполнена с односторонним кольцевым движением. Модуль включает многофункциональный центр управления движением.
Модуль содержит грузоподъемное устройство в виде беспилотного крана карусельного типа.
Кран содержит несущую колонну с вантовой мачтой, регулируемые ванты, снабженные стабилизирующими устройствами, магистральное полотно кольцевой формы с грузовыми электрическими тележками, лоток с зонами приемки и отправки груза.
При этом несущая колонна с элементами остойчивости и противовесов установлена на крановой колесной базовой раме с возможностью передвижения беспилотного крана карусельного типа.
Крановая колесная базовая рама установлена с возможностью взаимодействия с грузовой колесной площадкой.
А для крановой колесной базовой рамы и грузовой колесной площадки выполнено рельсовое полотно.
Причем грузовая колесная площадка имеет возможность взаимодействия с зонами приемки и отправки груза лотка и магистральным кольцевым полотном скоростной транспортной системы навесного типа.
Магистральное кольцевое полотно выполнено однотипно магистральному полотну кольцевой формы беспилотного крана карусельного типа.
Кроме того, магистральное полотно кольцевой формы и лоток с зонами приема и отправки груза беспилотного крана карусельного типа, также магистральное кольцевое полотно с грузовыми электрическими тележками скоростной транспортной системы навесного типа, также грузовая колесная площадка и также площадки приема и выдачи имеют возможности взаимодействия с соответствующими им системами дистанционного управления движением и перемещением груза многофункционального центра управления.
Заявителем не выявлены источники, содержащие информацию о технических решениях, идентичных настоящему изобретению, что позволяет сделать вывод о его соответствии критерию «новизна».
За счет реализации отличительных признаков изобретения (в совокупности с признаками, указанными в ограничительной части формулы) достигаются важные новые свойства объекта.
Выполнение модуля с грузоподъемным устройством и скоростной транспортной системой подвесного типа, выполнение грузоподъемного устройства в виде беспилотного крана карусельного типа с магистральным полотном кольцевой формы и грузовыми электрическими тележками однотипно магистральному кольцевому полотну скоростной транспортной системы подвесного типа увеличивает производительность и скорость погрузочно-разгрузочных работ.
Выполнение крана карусельного типа с несущей колонной, вантовой мачтой, регулируемыми вантами, также выполнение лотка крана с зонами приемки и отправки груза, а магистрального кольцевого полотна с грузовыми электрическими тележками, также установка крана на крановую колесную базовую раму с возможностью передвижения его, кроме того, наличие грузовой колесной площадки с возможностью взаимодействия с зонами приемки и отправки груза лотка и магистральным кольцевым полотном скоростной транспортной системы навесного типа повышают качество модуля и качество его эксплуатации.
Снабжение вант стабилизирующими устройствами, также выполнение несущей колонны с элементами остойчивости и противовесов, также наличие рельсового полотна для крановой колесной базовой рамы и грузовой колесной площадки обеспечивает надежное управление движением и перемещением груза.
Наличие многофункционального центра управления движением и его взаимодействие с магистральным кольцевым полотном скоростной транспортной системы подвесного типа, также с магистральным полотном кольцевой формы беспилотного крана карусельного типа, также с грузовой колесной площадкой и также с площадками приема и выдачи груза обеспечивают дистанционное управление движением и перемещением груза.
Заявителю не известны какие-либо публикации, которые содержали бы сведения о влиянии отличительных признаков изобретения на достигаемый технический результат. В связи с этим, по мнению заявителя, можно сделать вывод о соответствии заявляемого технического решения критерию «изобретательский уровень».
Сущность изобретения поясняется чертежами, где изображены:
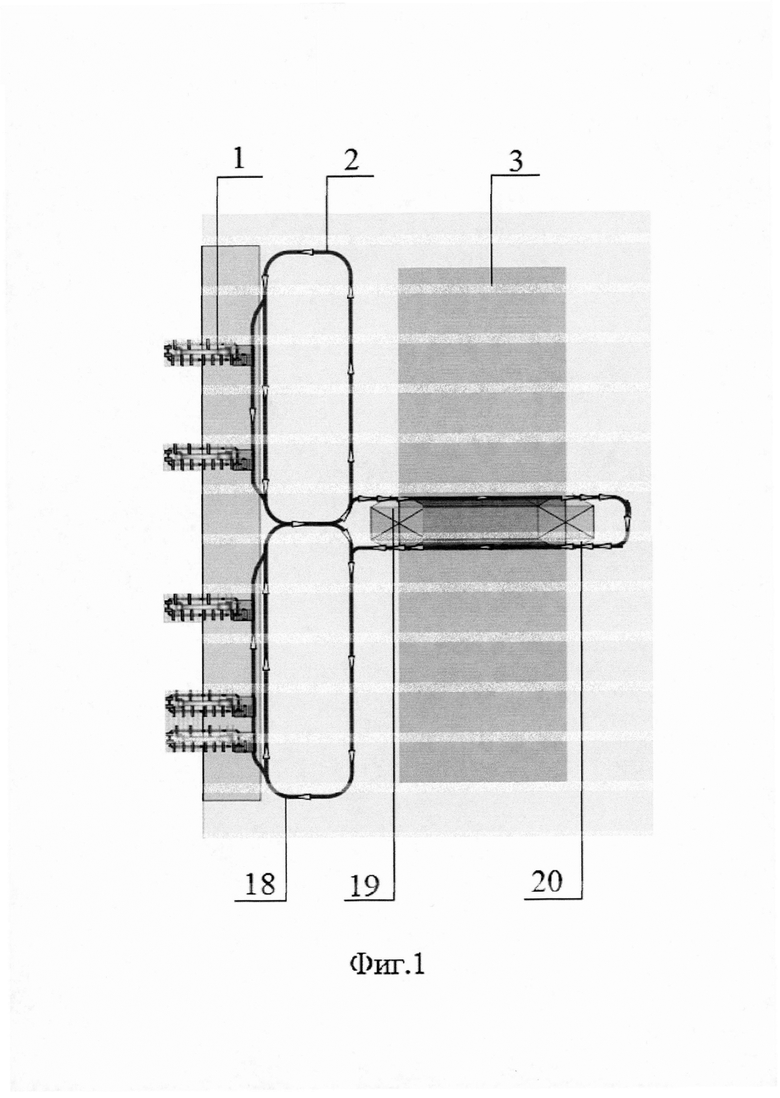
На фиг. 1 - «Универсальный автоматизированный погрузочно-разгрузочный модуль», схема, общий вид сверху;
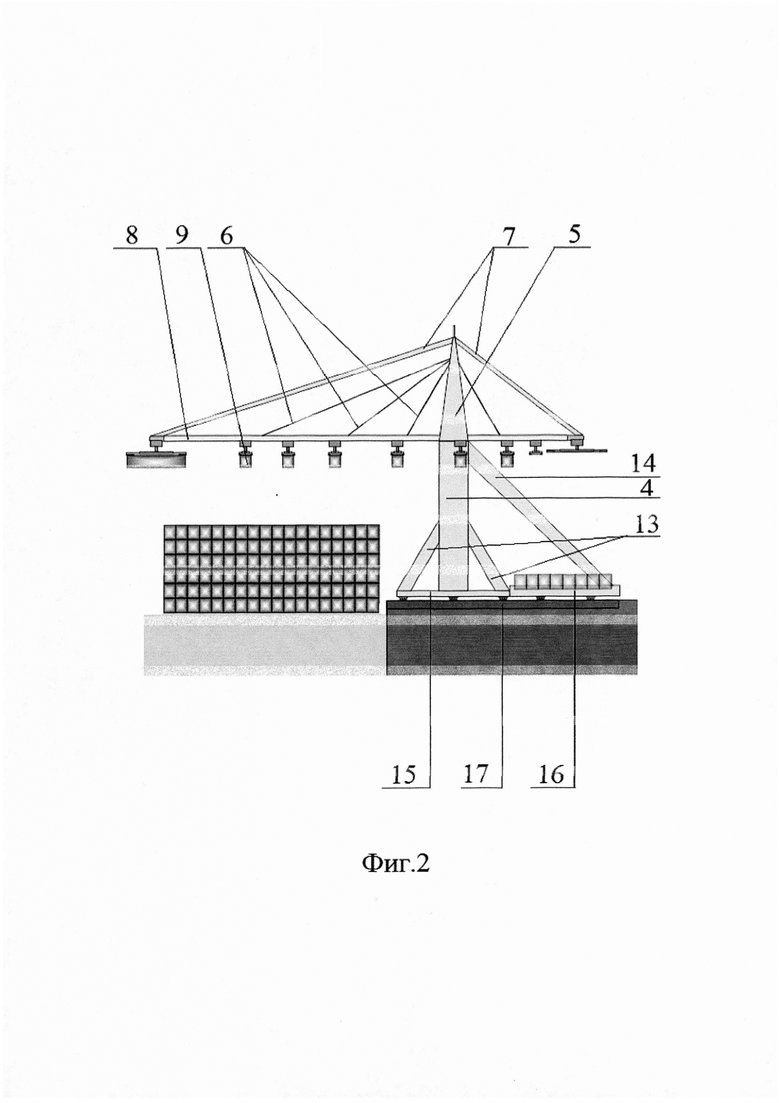
на фиг. 2 - «Универсальный автоматизированный погрузочно-разгрузочный модуль», беспилотный кран карусельного типа, общий вид сбоку;
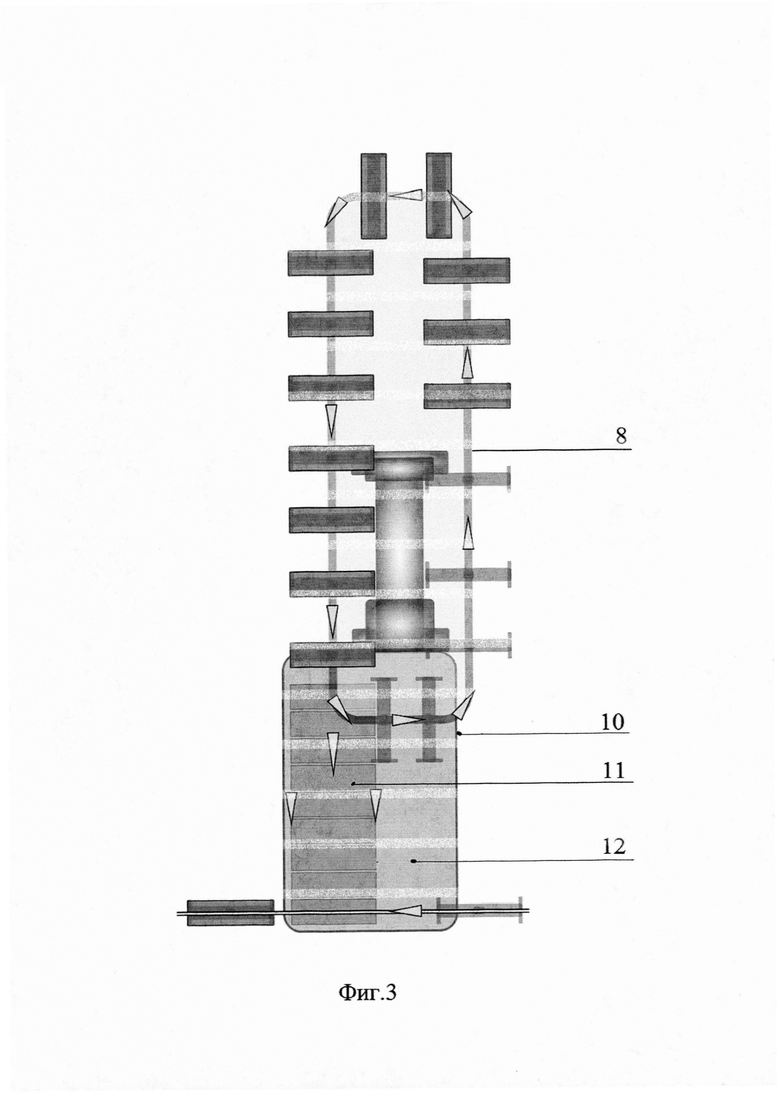
на фиг. 3 - «Универсальный автоматизированный погрузочно-разгрузочный модуль», беспилотный кран карусельного типа, общий вид сверху.
На чертежах изображено:
Беспилотный кран карусельного типа - 1.
Скоростная транспортная система навесного типа - 2.
Многофункциональный центр управления движением с системами дистанционного управления (крана 1 и системы 2) - 3.
Беспилотный кран карусельного типа 1 содержит:
Несущая колонна (крана 1) - 4.
Байтовая мачта (на колонне 4) -5.
Регулируемые ванты (крана 1) - 6,
стабилизирующие устройства (для вант 6) - 7.
Магистральное полотно кольцевой формы (крана 1) - 8,
грузовые электрические тележки (на полотне 8) - 9.
Лоток (крана 1) - 10,
зона приемки груза (лотка 10) - 11,
зона отправки груза (лотка 10) - 12.
Элементы остойчивости (колонны 4) - 13,
элементы нротивовесов (колонны 4) - 14.
Крановая колесная базовая рама (колонны 4) - 15.
Грузовая колесная площадка (дополнительно к раме 15) - 16.
Рельсовое полотно (для рамы 15 и площадки 16) - 17.
Скоростная транспортная система навесного типа 2 содержит:
Магистральное полотно (системы 2) - 18.
Площадка приема - 19.
Площадка выдачи - 20.
Универсальный автоматизированный погрузочно-разгрузочный модуль включает грузоподъемное устройство в виде беспилотного крана карусельного типа 1 и скоростную транспортную систему подвесного типа 2, взаимодействующие с системами дистанционного управления движением и перемещением груза многофункционального центра управления 3.
Скоростная транспортная система подвесного типа 2 содержит магистральную систему. Магистральная система состоит из магистральных полотен 18 с градиентными участками, выполнена с односторонним кольцевым движением.
Беспилотный кран карусельного типа 1 содержит несущую колонну 4 с вантовой мачтой 5, регулируемые ванты 6, снабженные стабилизирующими устройствами 7, магистральное полотно кольцевой формы 8 с грузовыми электрическими тележками 9, лоток 10 с зонами приемки Ни отправки 12 груза.
При этом несущая колонна 4 с элементами остойчивости 13 и противовесов 14 установлена на крановой колесной базовой раме 15 с возможностью передвижения беспилотного крана карусельного типа 1.
Крановая колесная базовая рама 15 установлена с возможностью взаимодействия с грузовой колесной площадкой 16.
А для крановой колесной базовой рамы 15 и грузовой колесной площадки 16 выполнено рельсовое полотно 17.
Причем грузовая колесная площадка 16 имеет возможность взаимодействия с зонами приемки 11 и отправки 12 груза лотка 10 и магистральным кольцевым полотном 18 скоростной транспортной системы навесного типа 2.
Магистральное кольцевое полотно 18 выполнено однотипно магистральному полотну кольцевой формы 8 беспилотного крана карусельного типа 1.
Кроме того, магистральное полотно кольцевой формы 8 и лоток 10 с зонами приема 11 и отправки 12 груза беспилотного крана карусельного типа 1, также магистральное кольцевое полотно 18 с грузовыми электрическими тележками скоростной транспортной системы навесного типа 2, также грузовая колесная площадка 16, а также площадки приема 19 и выдачи 20 имеют возможности взаимодействия с соответствующими им системами дистанционного управления движением и перемещением груза многофункционального центра управления 3.
Модуль осуществляет погрузку груза по сигналу системы дистанционного управления беспилотным краном карусельного типа 1 на грузовые электрические тележки 9 с механизмом распознавания и захвата груза (не показано).
С грузовых электрических тележек 9 груз перемещается на грузовую колесную площадку 16.
По сигналу системы дистанционного управления грузовой колесной площадки 16 груз перемещается на магистральное кольцевое полотно 18 скоростной транспортной системы навесного типа 2 и доставляется на площадку приема 19.
Разгрузку груза модуль осуществляет однотипно погрузке в обратной последовательности.
Предложенный погрузочно-разгрузочный модуль является универсальным при широком использовании в любом комплексе или установке, где требуется перемещение груза.
Предложенный погрузочно-разгрузочный модуль является автоматизированным, при этом погрузочно-разгрузочные работы он осуществляет по сигналам систем дистанционного управления движением и перемещением груза многофункционального центра управления.
Предложенный погрузочно-разгрузочный модуль является высокопроизводительным устройством, включает новую конструкцию беспилотного крана карусельного типа, работающего вместе со скоростной транспортной системой подвесного типа, осуществляет индивидуальное передвижение груза при отсутствии человеческого фактора, снижает экономические затраты, увеличивает скорость проведения работ в 3-5 раз.
Предложенный «Универсальный автоматизированный погрузочно-разгрузочный модуль Шумовского» может быть изготовлен промышленным способом, что подтверждают проектно-конструкторские и технологические проработки состава модуля, наличие систем дистанционного управления и перемещением груза, изучение эффективности эксплуатационного использования предложенного технического решения обусловливают, по мнению заявителя, соответствие модуля критерию «промышленная применимость».
Предложенное техническое решение позволяет увеличить производительность и скорость погрузочно-разгрузочных работ, повысить качество модуля и его эксплуатации, обеспечить надежное и дистанционное управление движением и перемещением груза.
Изобретение относится к устройствам для погрузочно-разгрузочных работ. Универсальный автоматизированный погрузочно-разгрузочный модуль включает скоростную транспортную систему подвесного типа, содержащую магистральную систему, многофункциональный центр управления движением, грузоподъемное устройство в виде беспилотного крана карусельного типа. Система состоит из магистральных полотен с односторонним кольцевым движением с градиентными участками. Кран содержит несущую колонну с вантовой мачтой, регулируемые ванты, снабженные стабилизирующими устройствами, магистральное полотно с грузовыми электрическими тележками, лоток с зонами приемки и отправки груза. Колонна с элементами остойчивости и противовесов установлена на крановой колесной базовой раме с возможностью взаимодействия с грузовой колесной площадкой и передвижения их по рельсовому полотну. Площадка имеет возможность взаимодействия с зонами лотка и магистральным кольцевым полотном, выполненным однотипно магистральному полотну крана. Полотна, лоток, грузовая и площадка приема и выдачи имеют возможности взаимодействия с соответствующими им системами дистанционного управления движением и перемещением груза центра управления. Достигается увеличение производительности и скорость погрузочно-разгрузочных работ. 3 ил.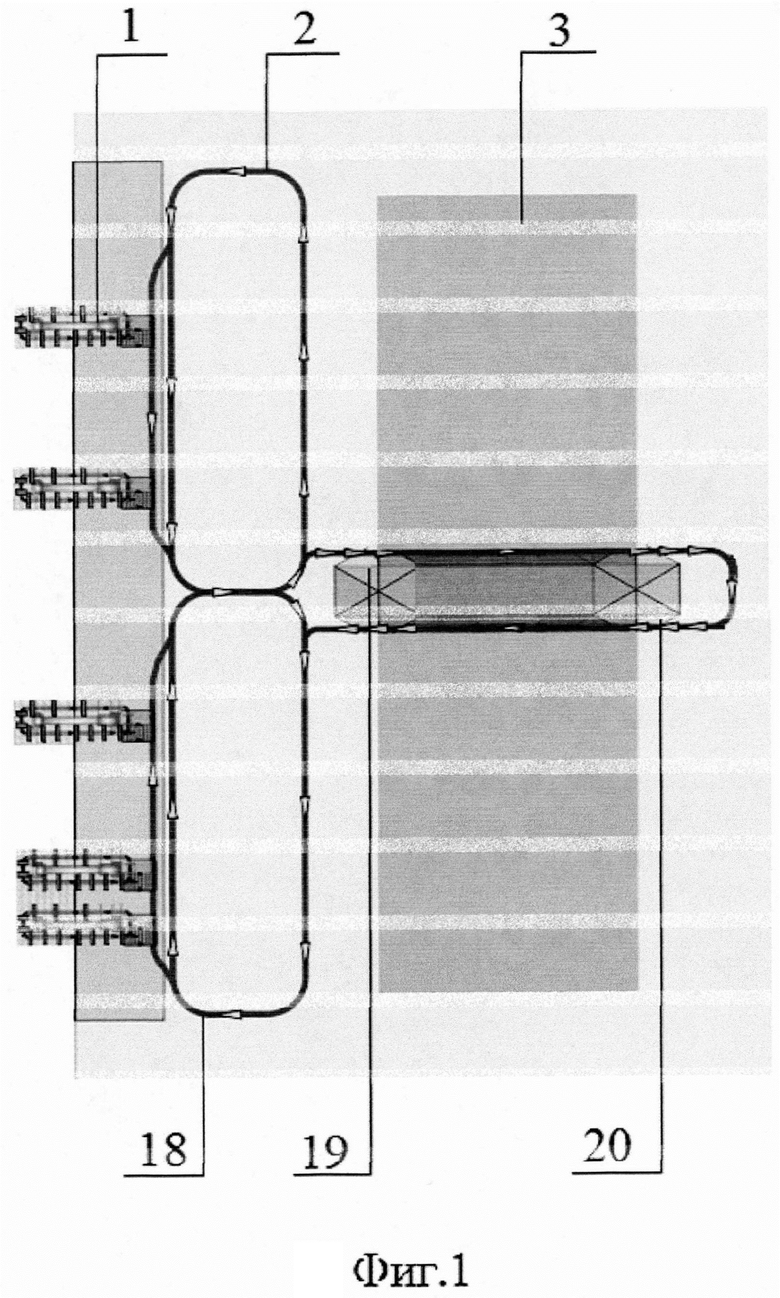
Универсальный автоматизированный погрузочно-разгрузочный модуль, включающий скоростную транспортную систему подвесного типа, содержащую магистральную систему, состоящую из магистральных полотен с градиентными участками, выполненную с односторонним кольцевым движением, и многофункциональный центр управления движением, отличающийся тем, что модуль содержит грузоподъемное устройство в виде беспилотного крана карусельного типа, содержащего несущую колонну с вантовой мачтой, регулируемые ванты, снабженные стабилизирующими устройствами, магистральное полотно кольцевой формы с грузовыми электрическими тележками, лоток с зонами приемки и отправки груза, при этом несущая колонна с элементами остойчивости и противовесов установлена на крановой колесной базовой раме с возможностями передвижения беспилотного крана карусельного типа и взаимодействия с грузовой колесной площадкой, а для крановой колесной базовой рамы и грузовой колесной площадки выполнено рельсовое полотно, причем грузовая колесная площадка имеет возможность взаимодействия с зонами приемки и отправки груза лотка и магистральным кольцевым полотном скоростной транспортной системы навесного типа, выполненным однотипно магистральному полотну кольцевой формы беспилотного крана карусельного типа, кроме того, магистральное полотно кольцевой формы и лоток с зонами приема и отправки груза беспилотного крана карусельного типа, также магистральное кольцевое полотно с грузовыми электрическими тележками скоростной транспортной системы навесного типа, также грузовая колесная площадка и также площадки приема и выдачи имеют возможности взаимодействия с соответствующими им системами дистанционного управления движением и перемещением груза многофункционального центра управления.
| УНИВЕРСАЛЬНЫЙ ТРАНСПОРТНО-ЛОГИСТИЧЕСКИЙ КОМПЛЕКС Шумовского | 2017 |
|
RU2655589C1 |
| EA 201391125 А1, 30.12.2013 | |||
| US 4018349 A, 19.04.1977 | |||
| US 2008219804 A1, 11.09.2008. | |||

