Область техники
Предлагаемое изобретение относится к области передвижных интеллектуальных систем, предназначенных для работы в сфере розничного распространения наиболее востребованных категорий продуктов у потребителей, преимущественно проживающих за пределами границ городских поселений, в значительном отдалении от стационарных сетевых и локальных торговых пунктов.
Уровень техники
В настоящее время в мире наблюдается тенденция активного развития робототехнического оборудования и вспомогательных интеллектуальных систем управленческого типа, которые повсеместно внедрены в значимые сферы промышленности, относящиеся к энергетике, информационным технологиям, здравоохранению и др.
Следует также отметить успешное применение роботизированных интеллектуальных машин в хозяйственной сфере и сфере обслуживания, например, роботы-пылесосы и бытовые человекоподобные роботы-помощники хорошо зарекомендовали себя на рынке и в настоящее время их конструирование достаточно перспективно и имеет большую инвестиционную привлекательность.
Значимую долю рынка занимают интеллектуальные робототехнические устройства, эксплуатируемые в сегменте транспортировочных и логистических процессов, к числу таких можно отнести наземные и воздушные роботы-курьеры, способные в автоматическом режиме доставлять грузы получателям и возвращаться обратно в пункты базирования. При этом в качестве воздушных роботов используются квадракоптеры, дроны и похожие средства, оснащенные воздушными винтами, а в качестве наземных роботов используются технические агрегаты, использующие в качестве движителя колесные, гусеничные или иные механические средства.
Особую популярность в последние годы завоевывают наземные и воздушные роботы, осуществляющие доставку продуктов питания до потребителей, успешно заменяя привычные доставочные службы, специализирующиеся на курьерской доставке продуктов. Однако работа таких устройств сопряжена с рядом технологических трудностей, в частности, заключающихся в необходимости содержания и обслуживания стационарного центрального пункта управления и обслуживания, где могли бы проводиться технические работы по поддержанию функциональности интеллектуальных машин.
Существующая проблема частично решена и в уровне техники встречаются разработки, подразумевающие наличие стационарных пунктов управления и сервисных центров, но данные решения могут функционировать в основном в крупных городах и обслуживать ограниченную по размерам территорию.
Существуют и передвижные независимые комплексы по обслуживанию и управлению наземными и воздушными средствами перемещения, доставляющими посылки, однако, они также не лишены недостатков.
Технические особенности и недостатки, имеющихся в уровне техники релевантных технических решений, на примерах будут рассмотрены далее.
Из уровня техники известен роботизированный комплекс, состоящий из наземного и воздушного транспортных средств (см. US10890921, кл. A63F9/24, публ. 2019 г. [1]).
Как указано известный роботизированный комплекс [1] включает наземное транспортное средство в виде автономного подзаряжаемого робота, двигательные способности которого реализованы за счет колесного, гусеничного или ножного привода. Воздушное транспортное средство оснащено винтовым приводом для возможности перемещения по воздушной среде.
Работа робототехнических средств обеспечивается и контролируются из диспетчерского пункта, за ходом выполняемых операций можно следить с помощью портативных электронных приборов, таких как смартфон, умные часы или планшетный компьютер.
Известные робототехнические средства оснащены системами управления на базе искусственного интеллекта и способны к решению множества спектра задач, различного содержания, особое значение, среди которых, занимает способность адресной доставки грузов, в том числе продуктовых до конечного получателя. Упомянутая доставка грузов может быть осуществлена наземным, воздушным или комбинированным путем.
Средства перемещения наземные и воздушные оснащены специальным оборудованием, позволяющим удерживать груз и доставлять его по заданным адресам.
Функционирование роботов-курьеров может быть организовано совместно с транспортным средством, которое по необходимости подвозит продукцию к ближайшему допустимому участку местности, после чего курьеры, контактируя с транспортным средством, снаряжаются посылками и обслуживают определенную область доставки.
Особенностью известного робототехнического комплекса [1] является технологическая возможность стыковки наземного робота-курьера и воздушного робота курьера между собой, что образует некую совмещенную конструкцию, приспособленную таким образом к комбинированному перемещению и решению вследствие этого нестандартных логистических задач.
Недостатком известного комплекса [1] следует признать невысокие и неконкурентные функциональные эксплуатационные показатели, проявляющиеся в следствии человекоподобного строения наземных роботов, непредназначенного для перемещения объемных грузов, и в следствии не лучших аэродинамических показателей воздушных средств, влияющих отрицательно на скорость и маневренность при перемещении.
Дополнительным недостатком комплекса [1] следует считать вынужденный и сложный в технологическом отношении поэтапный процесс стыковки наземного и воздушного средства перемещения, которым, при проведении работ связанных с доставкой грузов можно пренебречь и, собственно, доставлять грузы отдельными компонентами комплекса. Кроме того упомянутая стыковка подразумевает необходимость программной перенастройки оборудования, что увеличивает время на проведение курьерских мероприятий.
Из уровня техники известна система подачи еды и напитков на базе автономных и полуавтономных автомобилей (см. CA3070300, кл. G06Q10/00, публ. 2019 г. [2]).
Известная разработка [2] относится к системам частного городского хозяйства и может быть успешно использована в курьерской среде для доставки потребителям, заказанных ими продуктов питания.
Известная система [2] представляет из себя платформу, технологически предусматривающую автономные или полуавтономные режимы работы, при этом в качестве указанной платформы следует понимать специальное грузовое транспортное средство, содержащее отсеки для хранения и эргономичной подачи продуктов питания и управляющее оборудование, обеспечивающее работу подсистем транспортного средства, в том числе работу первоочередного погрузочного механизма и распределительной системы, организующей хранение и эргономично выверенную раздачу продукции.
Из существенных особенностей данной системы следует отметить наличие в отсеках для хранения продуктов модуля контроля температуры, предназначенного для поддержания необходимой температуры в соответствии с условиями хранения определенных категорий товаров.
Кроме того, платформа имеет надежную и адаптированную для работы с продуктовыми грузами автоматику, подразумевающую использование внешних информационных сервисов и взаимодействующих с ними внутренних компонентов памяти, наделенных актуальной информацией о видах поступающей на реализацию продукции для целей ее точного позиционирования и конкретного выбора режимов хранения и особенностей подачи каждых продуктов в отдельности.
Важным преимуществом известного решения [2] является возможность использования в рамках известной технологии нескольких транспортных средств, образующих своего рода курьерскую транспортную сеть, способную обслуживать большие территории и охватывать широкий круг потребителей, доставляя продукцию различного пищевого содержания.
В качестве недостатка данной системы [2] следует отметить отсутствие возможности точной адресной доставки, ограничиваясь доступным местом парковки в пределах места нахождения заказчика, что в свою очередь обуславливает необходимость для заказчика искать место стоянки транспортного средства, которое в условиях ограниченного парковочного пространства может быть отдалено от точки заказа на достаточно удаленное расстояние.
Используемые транспортные средства конструкционно предназначены исключительно для передвижения в городских условиях по асфальтовому покрытию и не имеют возможности перемещения по труднопроходимым участкам местности, в этой связи следует отметить дополнительный недостаток системы [2], означающий нецелесообразность и практическую невозможность обслуживания потребителей, находящихся за пределами крупных городских поселений, преимущественно проживающих в условиях пересеченной местности.
Наиболее близким с точки зрения технической сущности по отношению к заявляемому изобретению является сконструированный на базе грузового транспортного средства интеллектуальный робот-помощник по продаже продуктов (см. CN112561623, кл. B25J 11/00, публ. 2021 г. [3]).
Известное техническое решение [3] относится к передвижным автоматическим роботизированным средствам, оснащенных управляемым компьютерной системой оборудованием, позволяющим осуществлять загрузку, хранение, перемещение и итоговую реализацию продуктов.
Известное решение является передвижной интеллектуальной машиной для розничной продажи продуктов. Интеллектуальная машина представляет из себя, как правило, грузовое транспортное средство, оснащенное необходимым набором оборудования для осуществления загрузки товаров, упаковки, временного хранения и розничной реализации. За ходом выполнения рабочих процессов следит комплексная управленческая система, имеющая необходимые аппаратные и программные средства, имеющие возможность формирования команд управления для механизированных исполнительных средств, сортирующих продукцию внутри транспортного средства и подающих ее на подготовленные для временного хранения участки.
В качестве средств погрузки непосредственно в систему используются, перемещающиеся по воздушному пространству беспилотные летательные аппараты, запрограммированные на выполнение доставки товаров, находящихся неподалеку на складских пунктах.
В известной системе используется функционал для распознавания продукции и безошибочного определения обрабатываемого в определенный период времени продукта, для чего используются встроенные датчики изображения, помогающие системе производить корректные рабочие операции.
В работе известной системы делается акцент на корректную идентификацию заказанного товара, поддерживаемую контрольными средствами измерения, посылающими данные в блок аналитической обработки, в результате чего обеспечивается точная расчетная подачи требуемого продукта и его возможная доставка до указанного адресата.
В работе известной системы [3], в частности для распределения груза, доставленного беспилотным летательным аппаратом, используется роботизированная рука-манипулятор с захватном элементом, помещающим грузы в необходимые отсеки временного складского пространства, организованного в транспортном средстве.
Недостатком известной системы [3] следует признать недостаточно продуманный и соответственно неконкурентный функционал оборудования, который не позволяет проводить “воздушные” операции по оперативной и точечной доставке, с помощью беспилотных летательных средств посылок непосредственно в руки заказчику, что характеризует данную технологию как полуавтоматическую и неспособную в абсолютном автоматическом режиме, без помощи человека, снабжать население продуктами.
Следует предположить, что дополнительным недостатком может являться несовершенное конструктивное выполнение применяемой руки-манипулятора, которая имеет достаточно протяженный и изогнутый рычаг, на конце которого установлен захват. В описании известного решения [3] нет исчерпывающих сведений или базовых теоретических сведений, подтверждающих техническую реалистичность успешного функционирования данного средства и решения возложенной на него задачи, связанной с временным складированием и сортировкой продукции в отсеках транспортного средства.
Раскрытие изобретения
Технической проблемой предлагаемого изобретения является создание высокотехнологичного производительного и вместе с тем расчетливого торгово-выставочного транспортного средства, обладающего внедорожными характеристиками и коммуникативными возможностями с признаками интеллектуальности, что позволит снабжать продукцией население, преимущественно проживающее в отдаленных от цивилизованного мира участках местности, оказывая при этом информационную поддержку, выраженную в получении связи с внешним миром и отклике потребителя, заинтересованного в приобретении той или иной продукции.
Техническим результатом предлагаемого изобретения, который решает обозначенную выше техническую проблему является реализация назначения по созданию вездеходного объекта техники, наделенного способностью при умеренном энергопотреблении и сниженных материальных тратах добираться до труднодоступной местности и производить в высокоэффективном цикличном режиме отпуск указанной потребителем продукции, поступающей к последнему по выработанному алгоритму, предусматривающему бережное складирование/хранение, скоростной сбор/подготовку и точную позиционную выдачу/подачу.
Указанный технический результат и существующая техническая проблема достигаются в результате того, что самоходная интеллектуальная машина для розничного распространения выставленной на обозрение продукции, предназначенной для потребителя, преимущественно находящегося вне пределов инфраструктурных поселений, выполнена в виде предпочтительно внедорожного грузового, как правило, с беспилотным управлением транспортного средства, системно распределенного на взаимодействующие между собой маршрутно-управленческую подсистему, распределительную торгово-выставочную подсистему и доставочную исполнительную подсистему, объединение которых формирует автономную и условно рассредоточенную, преимущественно популяризационную раздаточную структуру, имеющую возможность дистанционного контроля функционирования отделяемого и стационарного автономно работающего оборудования, обладающего автоматически подстраивающимся функционалом по поддержанию потребительского обзора и конечного получения выбранной категории товара, при этом маршрутно-управленческая подсистема содержит блок управления перемещением и локализации транспортного средства и блок управления используемыми стационарными и перемещающимися с возможностью отделения автономно функционирующими компонентами, базирующимися в распределительной торгово-выставочной подсистеме и в доставочной исполнительной системе с возможностью временного отделения отдельных модулей от таковых, причем координационно-распределительная часть указанных автономно работающих компонентов распределительной торгово-выставочной подсистемы выполнена в виде, по меньшей мере, одного управляемого манипуляторного роботизированного механизма, строение которого основано на конструкционном сочетании выполненных с возможностью перемещения опорной верхней двух-координатной грузовой площадки и опорной нижней координационной площадки, между которыми на соединительной транспортировочной перемычке оборудована, как минимум, одна контактная двух-координатная грузовая площадка, снабженная исполнительным органом, сконфигурированным для захвата продукции с целью управления ее пространственным положением, в том числе создавая возможность ее наглядного обозрения посредством имеющегося витринного участка, а также с целью последующего погрузо-разгрузочного позиционного контакта с указанными автономно работающими компонентами доставочной исполнительной системы, одна часть которых является автоматизированным вспомогательным оборудованием в виде скоординированных между собой буферных и обладающих возможностью распределения и грузового подъема систем, производящим прохождение, отправку и прием другой из частей, составляющей упомянутые временно отделяемые модули в виде наземных и воздушных средств перемещения, для которых предусмотрены стационарные посадочные участки, поддерживающие работоспособность, предусматривающую возможность стыковки/расстыковки с выбранной пользователем продукции и поиск пространственного положения в рамках производимой рабочей операции.
По одному из допустимых и целесообразных вариантов исполнения изобретения на соединительной транспортировочной перемычке между опорной верхней двух-координатной грузовой площадкой и опорной нижней координационной площадкой манипуляторного роботизированного механизма установлена дополнительная контактная двух-координатная грузовая площадка, оснащенная упаковочным устройством компрессорного типа для обертки продукции защитным покрытием.
По одному из возможных и перспективных вариантов исполнения изобретения контактные двух-координатные грузовые площадки манипуляторного роботизированного механизма устанавливают на поворотной стойке, производящей вращение вокруг оси.
Также одним из перспективных вариантов исполнения изобретения является оснащение контактных двух-координатных грузовых площадок манипуляторного роботизированного механизма магнитным механизмом их крепления к соединительной транспортировочной перемычке, позволяющим осуществлять вращение двух-координатных грузовых площадок вокруг оси соединительной транспортировочной перемычки.
Эффективно и рационально, если вариант исполнения предлагаемого изобретения будет допускать, что контактная двух-координатная грузовая площадка манипуляторного роботизированного механизма будет содержать дополнительный исполнительный орган, установленный с возможностью смещения рабочей части относительно основания.
Согласно частным вариантам исполнения предлагаемого изобретения, указанные основания исполнительных органов выполняются телескопическими, а их рабочие части оснащены обжимными захватными элементами.
Является наиболее оправданным и рациональным, когда используемые в предлагаемом изобретении наземные средства перемещения выполняются в виде роботизированных роботов-курьеров, передвигающихся с помощью колесного или ножного движителя.
Один из конструктивных вариантов предлагаемого изобретения предусматривает выполнение воздушных средств перемещения в виде роботов курьеров, использующих воздушные винты для перемещения или лопасти.
По одному из возможных вариантов исполнения предлагаемого изобретения, указанная распределительная торгово-выставочная подсистема может содержать холодильную секцию.
Частный вариант исполнения предлагаемого изобретения допускает наличие выдвижного трапа для наземных средств перемещения.
Применяемый в предлагаемом изобретении манипуляторный роботизированный механизм может быть оснащен цифровым средством видеонаблюдения за контролем процессов перемещения и подготовке к выдаче выбранной пользователем продукции.
Предложен к рассмотрению полностью роботизированный объект техники, представляющий из себя предпочтительно грузовое самоходное транспортное средство, преимущественно управляемое в беспилотном режиме, мониторинг работы которого, в частности, подразумевающий исполнение основного возложенного функционала может быть осуществлен дистанционно во внешнем центре управления качеством и безопасности дорожных перевозок. Указанное самоходное транспортное средство конструкционно является независимой интеллектуальной системой, и эксплуатируется автоматически по заранее заложенному программному функционалу, однако, особенности исполнения, в том числе программного, допускают переходы на ручное пилотирование и управление оборудованием, а также допускают самостоятельное принятие решений и обработку сигналов в теоретических случаях первичного неисполнения возлагаемого функционала или в случае иных незапланированных внештатных ситуаций, приводящих к сбою настроек аппаратных средств компьютерной системы.
Согласно назначению, предлагаемый роботизированный объект техники создан для распространения продукции, в том числе жизненно важной, в труднодоступных частях местности, жители которой могут остро нуждаться в получении необходимых для жизнеобеспечения средств, доставка и централизованная раздача которых общепринятыми известными методами может быть ограничена, поскольку для этого необходим сбор средств/материалов, изучение маршрутов, а также подготовка специализированной наземной и воздушной техники, требующей привлечение значительных ресурсов, в том числе штатных водителей, продавцов, грузчиков и иного необходимого персонала, участвующего в разработке плана мероприятий.
Предлагаемая самоходная интеллектуальная машина по большей части компенсирует перечисленные в абзаце выше недостатки тем, что имеет, в предпочтительном варианте своего исполнения, беспилотное управление и автоматизированные механизмы подготовки и централизованной реализации продукции, что в сочетании с внедорожным потенциалом грузового транспортного средства способствует с минимальными энергетическими и трудовыми затратами доставлять требуемые товары в определенную точку местности с возможностью централизованной автоматической реализации населению быстро, точно и без перебоев, а главное без использования живой рабочей силы, склонной к прерыванию рабочего процесса, замедлению действий, ошибок и неточностей при передаче, а также другим действиям, негативно влияющим на качество оказываемых услуг.
Базовыми особенностями предлагаемой самоходной интеллектуальной машины для доставки и распространения продукции, позволяющими реализовывать возложенный на нее функционал является ее выполнение на базе грузового транспортного средства с внедорожным потенциалом, который системно разделен на маршрутно-управленческую часть, распределительную торгово-выставочную часть и доставочную исполнительную подсистему, объединение которых формирует раздаточную структуру, содержащую, в частности стационарное и подвижное с отделяемыми компонентами оборудование, скоординированная работа которого позволяет оперативно и безошибочно выставлять на обозрение актуальный ассортимент продукции и выдавать приобретенный товар на месте либо доставлять желающим выбранный товар из представленного ассортимента, обеспечивая при этом точность и в том числе гигиеническую безопасность при передаче.
Достижение высокого уровня технологичности, оптимальной производительности, а также устойчивых и надежных коммуникативных возможностей, согласно изобретательскому замыслу, обеспечивается (обусловлено), в частности, за счет наличия в роботизированной системе частично отделяемого и стационарного оборудования, обладающего интеллектуально подстраивающимся функционалом, поддерживающим возможность потребительского обзора и последующего приобретения, при этом указанное частично отделяемое и стационарное оборудование базируется в торгово-выставочной части и в доставочной исполнительной части машины и подразумевает наличие (эксплуатацию) манипуляторных роботизированных механизмов, сочетающих в конструкции двух-координатные грузовые площадки, координационную площадку, при этом одна из указанных площадок является контактной с исполнительным органом, необходимым для контакта с продукцией и для последующего контактирования с узлами буферных погрузочных подсистем, производящим отправку и прием другой из частей, составляющей временно отделяемые доставочные модули в виде наземных и воздушных средств перемещения, у которых в системе есть свои посадочные участки, поддерживающие их работоспособность, согласно заложенному программному функционалу.
Таким образом, предлагаемое выше выполнение заявляемого роботизированного комплекса для хранения и отпуска продукции с учетом его характеристик и технических особенностей, образует совокупность признаков, достаточных для достижения заданного технического результата, заключающегося в реализации назначения по созданию вездеходного объекта техники, наделенного способностью при умеренном энергопотреблении и сниженных материальных тратах добираться до труднодоступной местности и производить в высокоэффективном цикличном режиме продажу (в том числе дистанционную) и отпуск указанной потребителем продукции, поступающей к последнему по выработанному алгоритму, предусматривающему бережное складирование/хранение, скоростной сбор/подготовку и точную позиционную выдачу/подачу.
Краткое описание чертежей
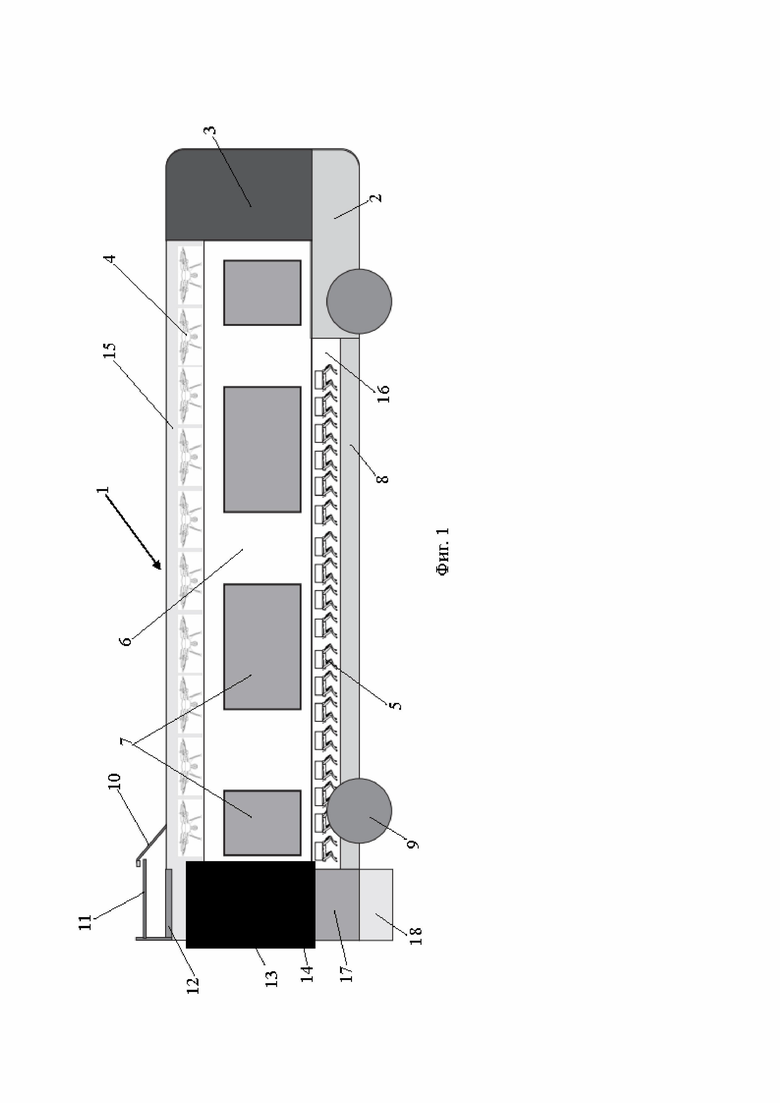
На фиг. 1 представлен общий вид подготовленного к эксплуатации роботизированного вездеходного комплекса;
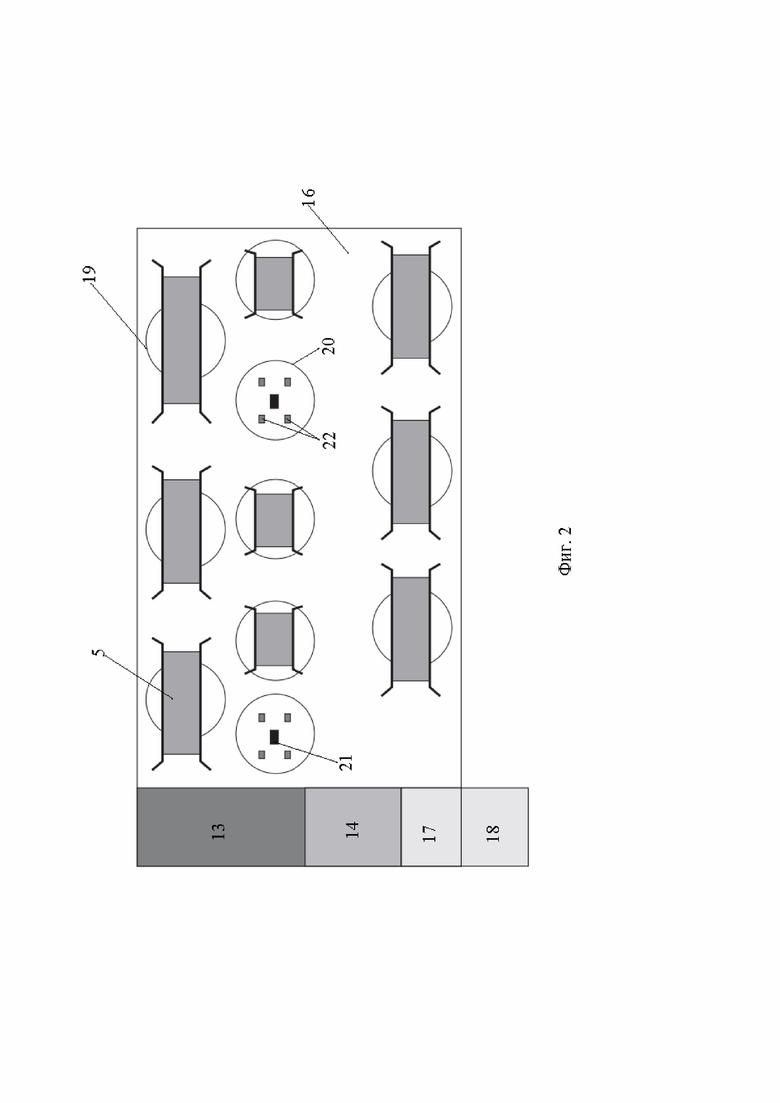
На фиг. 2 показана схема размещения и передвижения наземных средств перемещения;
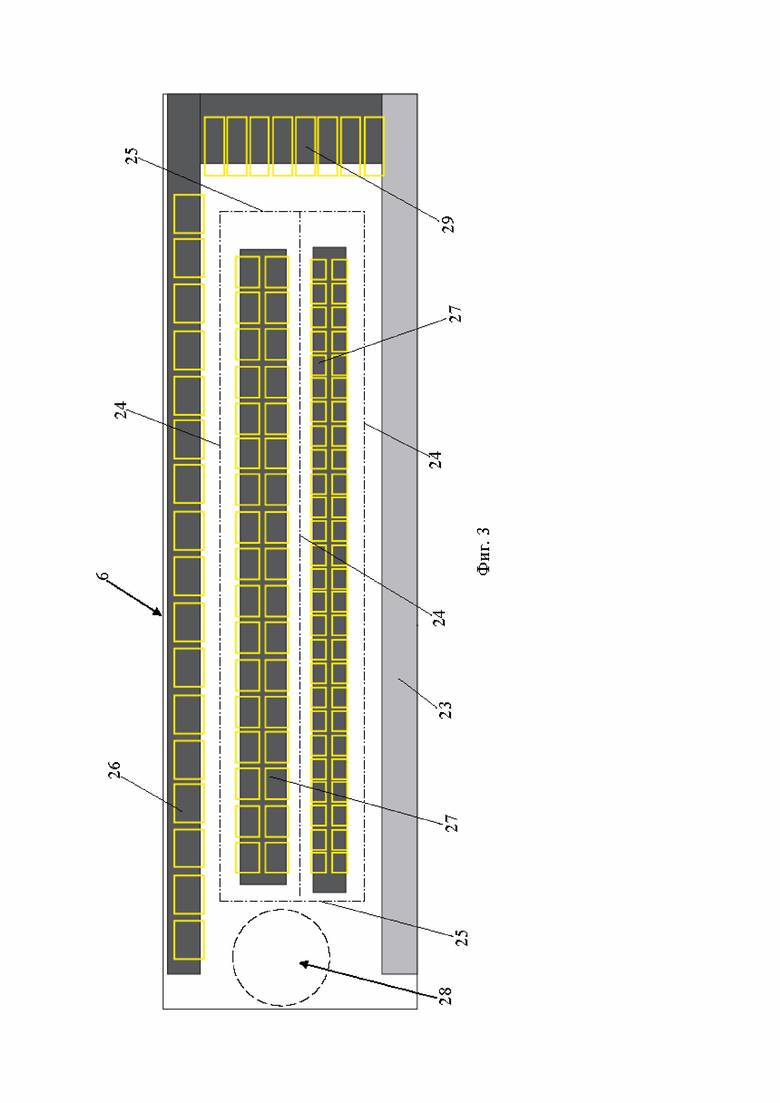
На фиг. 3 схематично представлена внутренняя структура распределительной торгово-выставочной подсистемы;
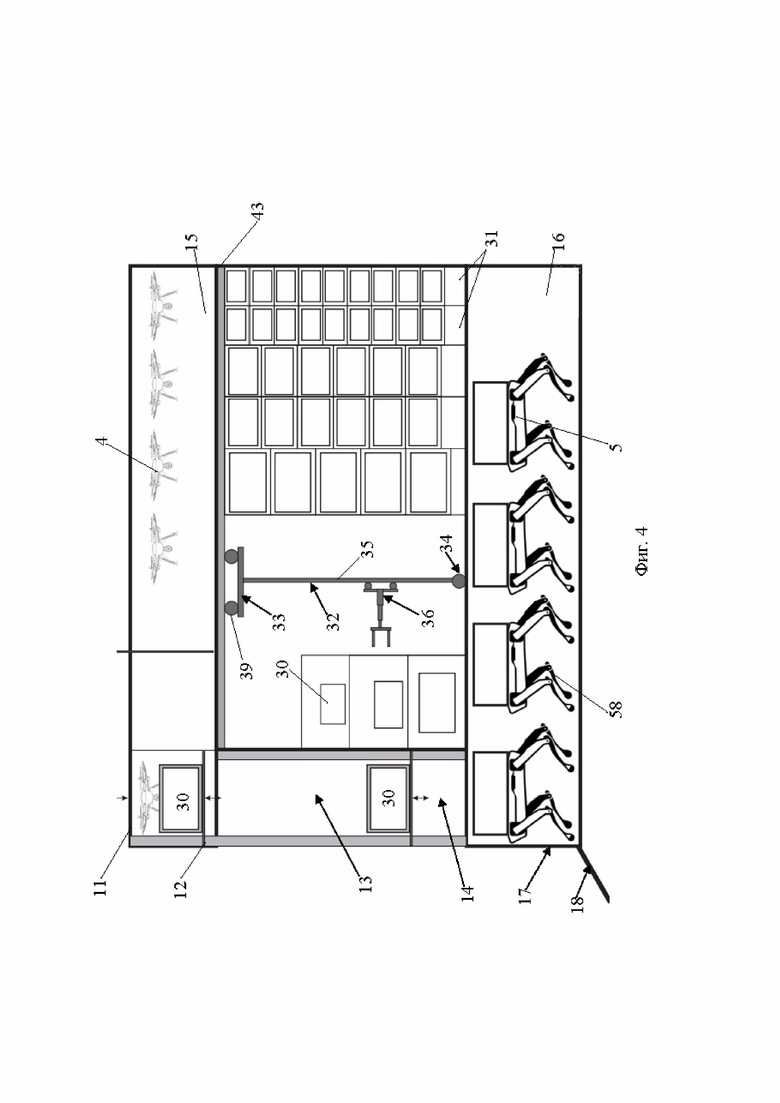
На фиг. 4 представлен эксплуатационный вариант взаимодействия оборудования торгово-выставочной подсистемы и доставочной исполнительной подсистемы;
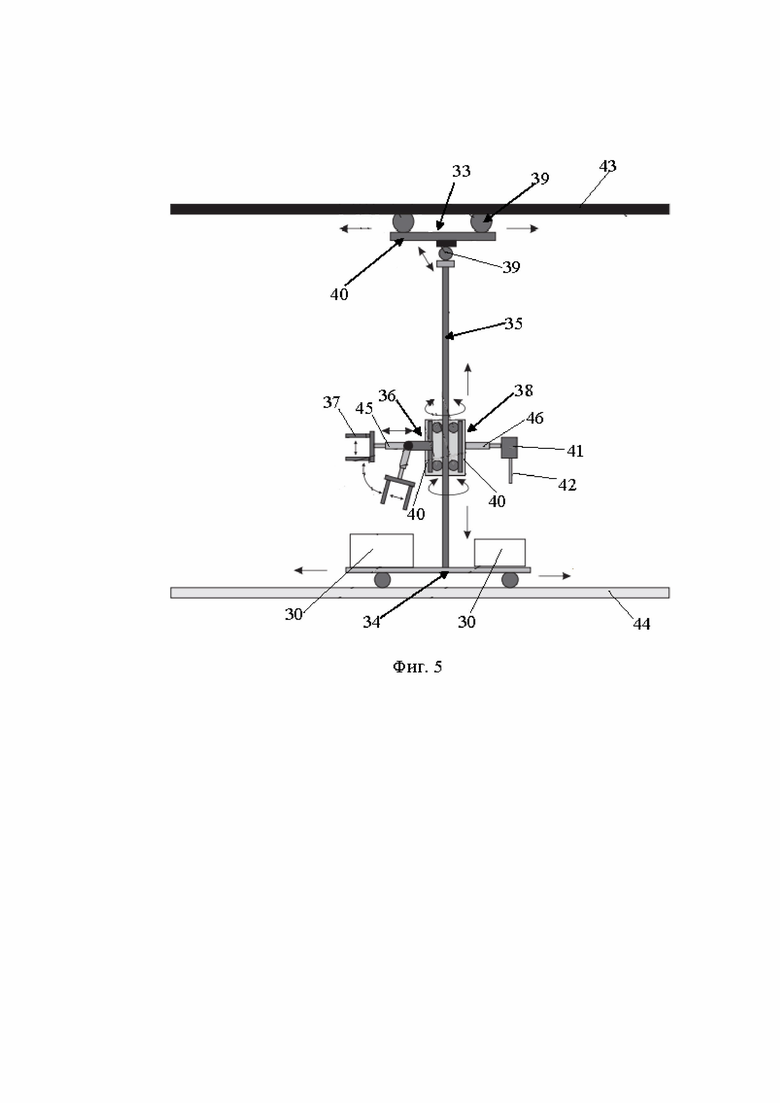
На фиг. 5 представлен вариант конструкции и эксплуатационные возможности манипуляторного роботизированного механизма;
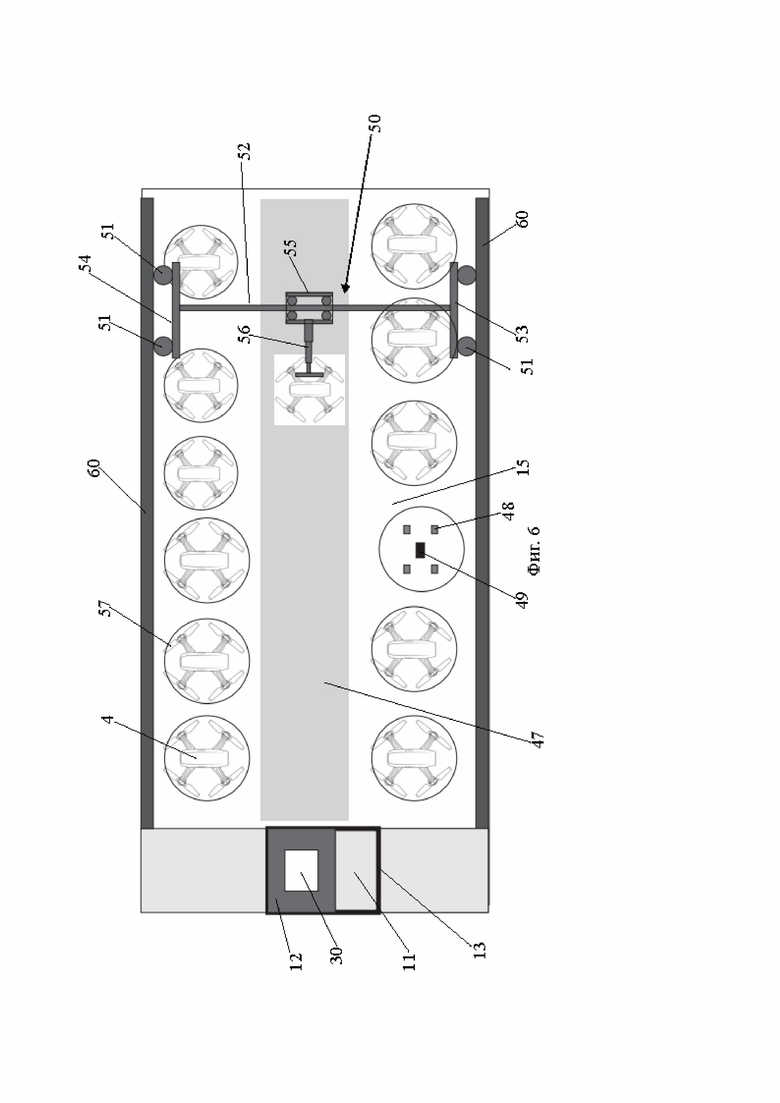
На фиг. 6 показан вариант расположения и схемы движений воздушных средств перемещения, вид сверху;
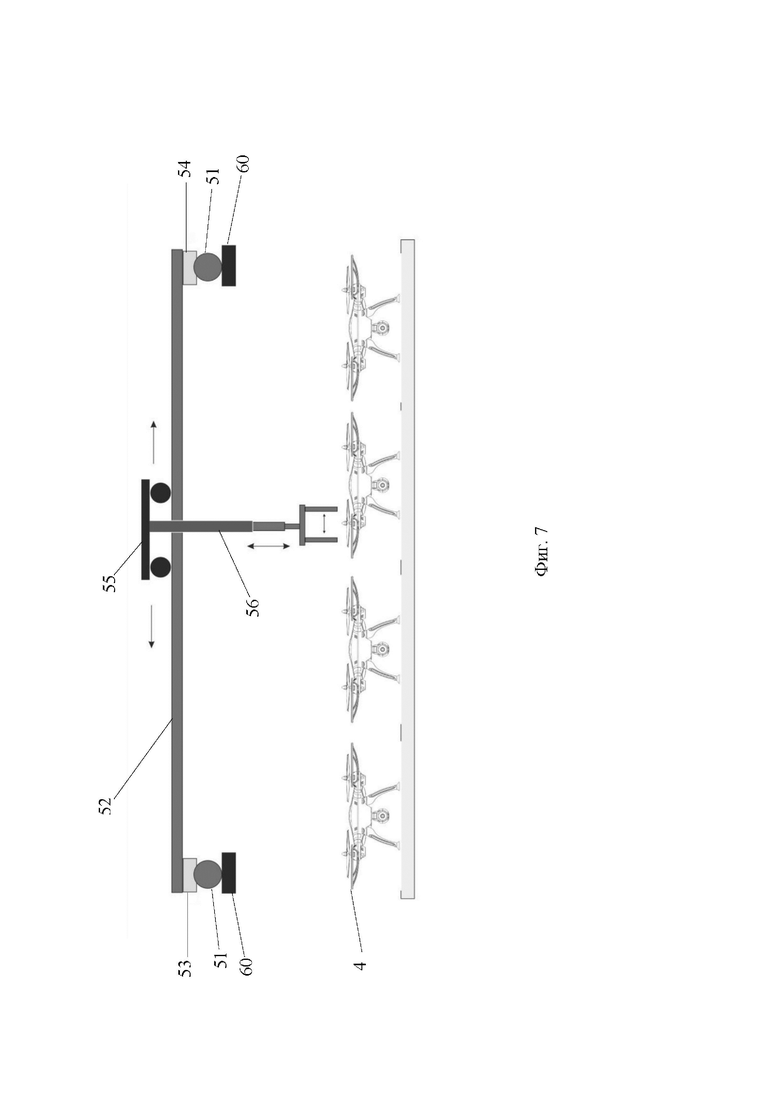
На фиг. 7 показан вариант конструкции дополнительного манипуляторного роботизированного механизма, вид сбоку;
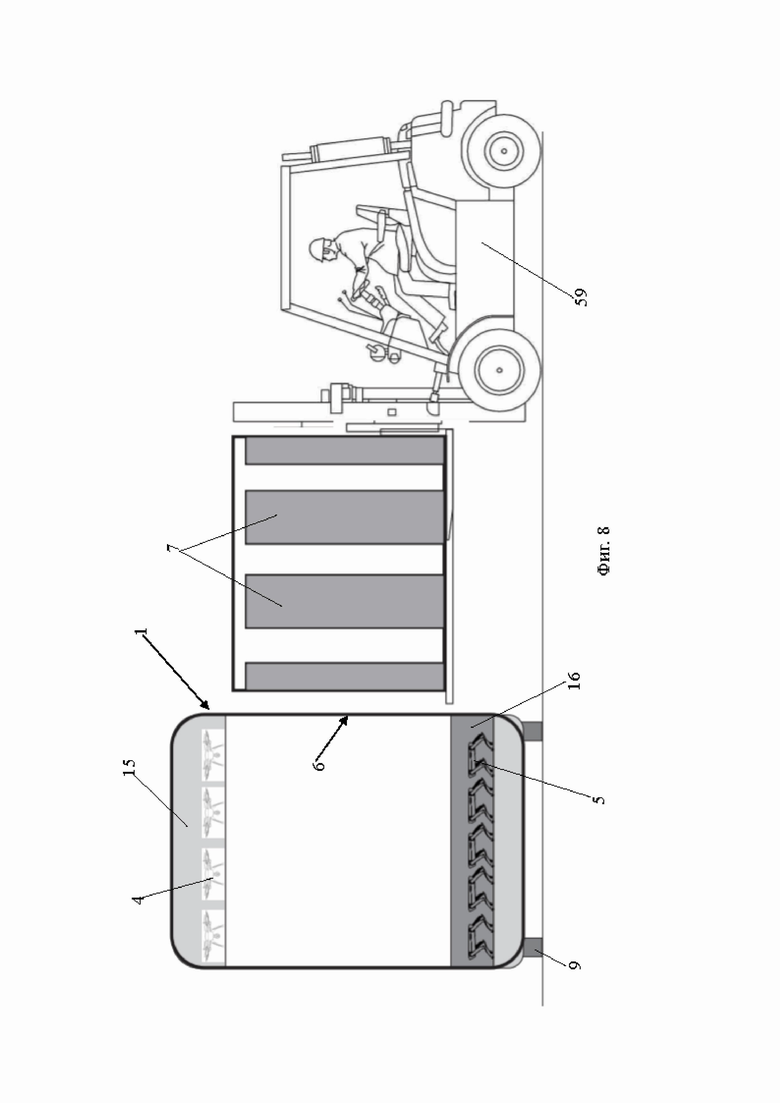
На фиг. 8 схематично представлен вариант установки стеллажей с продуктами в распределительную торгово-выставочную подсистему.
Осуществление изобретения
Предлагаемое изобретение поясняется конкретным примером выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение существующей технической проблемы.
На представленных фиг. 1 - фиг. 8 числовыми позициями обозначены следующие части и компоненты предлагаемой самоходной интеллектуальной машины:
1 - вездеходное транспортное средство;
2 - двигатель транспортного средства;
3 - многоцелевой блок управления;
4 - воздушные средства перемещения;
5 - наземные средства перемещения;
6 - витринный участок;
7 - группы несформированных стеллажей распределительной торгово-выставочной подсистемы;
8 - зарядная аккумуляторная станция;
9 - средства повышения проходимости;
10 - барьеры для воздушных потоков;
11 - верхний люк входа/выхода воздушных средств перемещения;
12 - нижний пропускной люк, совмещенный с магнитной посадочной платформой;
13 - лифтовая система для перемещения товаров;
14 - участок для подачи на платформу лифта сформированных комплектов товаров с целью их последующей выдачи;
15 - отсек для размещения воздушных средств перемещения;
16 - отсек для размещения наземных средств перемещения;
17 - шлюз для входа/выхода наземных средств перемещения;
18 - выдвижной трап для наземных средств перемещения;
19 - посадочный участок для наземного средства перемещения;
20 - свободный посадочный участок наземного средства перемещения;
21 - контактный элемент для поддержания уровня заряда наземного средства перемещения;
22 - магнитные крепления для стабилизации наземных средств перемещения;
23 - холодильная секция;
24 - продольные проходы для перемещения манипуляторного роботизированного механизма;
25 - поперечные проходы для перемещения манипуляторного роботизированного механизма;
26 - односторонние стыковочные многоуровневые стеллажи;
27 - двусторонние стыковочные многоуровневые стеллажи;
28 - погрузочно-разгрузочный участок;
29 - торцевые односторонние стеллажи повышенной вместительности;
30 - комплекты товаров;
31 - ячейки с группами товаров;
32 - манипуляторный роботизированный механизм;
33 - верхняя двух-координатная грузовая площадка;
34 - нижняя координационная площадка;
35 - соединительная транспортировочная перемычка;
36 - контактная двух-координатная грузовая площадка;
37 - исполнительный орган;
38 - дополнительная контактная двух-координатная площадка;
39 - сервоприводы площадок;
40 - опорные поверхности площадок;
41 - упаковочное устройство компрессорного типа;
42 - сопло упаковочного устройства;
43 - верхние направляющие для перемещения верхней двух-координатной грузовой площадки;
44 - напольный участок торгово-выставочной подсистемы;
45 - основание исполнительного органа;
46 - основание упаковочного устройства;
47 - технологический проход для транспортировки воздушных средств перемещения;
48 - магнитные крепления для стабилизации воздушного средства перемещения;
49 - контактный элемент для поддержания уровня заряда воздушного средства перемещения;
50 - дополнительный манипуляторный роботизированный механизм;
51 - сервоприводы дополнительного манипуляторного роботизированного механизма;
52 - соединительная перемычка дополнительного манипуляторного роботизированного механизма;
53 - первая опорная площадка дополнительного манипуляторного механизма;
54 - вторая опорная площадка дополнительного манипуляторного механизма;
55 - контактная площадка дополнительного манипуляторного роботизированного механизма;
56 - исполнительный орган дополнительного манипуляторного исполнительного механизма;
57 - воздушные винты для перемещения;
58 - ножные движители;
59 - погрузчик;
60 - боковые части торгово-выставочной подсистемы, по которым перемещается дополнительный манипуляторный роботизированный механизм.
Итак, предлагаемая самоходная интеллектуальная машина предназначена для распространения, преимущественно розничного, выставленной на обозрение продукции. Продукция рассматривается различная, но в основном это продукты питания, в том числе жизненно необходимые (вода, мука, крупы, мясо, рыба, овощи и т.д.).
Перечисленная продукция предназначается для потребителей, которые преимущественно находятся вне пределов инфраструктурных поселений и, соответственно, имеют ограничения в посещении стационарных сетевых и локальных торговых пунктов, однако, нуждаются в свежей продукции, обеспечивающей нормальную жизнедеятельность человека.
Самоходная интеллектуальная машина выполнена в виде вездеходного транспортного средства 1, которое имеет грузовое исполнение и внедорожный потенциал, при этом управление машиной обеспечивается посредством беспилотного режима.
Вездеходное транспортное средство 1 системно разделено на взаимодействующие между собой маршрутно-управленческую подсистему, распределительную торгово-выставочную подсистему и доставочную исполнительную подсистему.
Объединение перечисленных основных подсистем формирует автономную и условно рассредоточенную структуру, позволяющую активно в динамическом режиме осуществлять распространение продукции и при этом популяризировать некоторые ее виды, которые могут оказаться востребованными у населения, лишенного возможности, ввиду особенностей местности, питаться разнообразными продуктами.
Образованная популяризационная и раздаточная структура, подготовленная на базе вездеходного транспортного средства 1, является полностью автоматизированной и имеет техническую возможность дистанционного контроля функционирования отделяемого и стационарного автономно работающего оборудования, особенности построения, расположения и функционирования которого составляют ключевую часть изобретательского замысла предлагаемой самоходной интеллектуальной машины.
Согласно конструкции вездеходного транспортного средства 1, применяемое отделяемое и стационарное оборудование распределительной торгово-выставочной и доставочной исполнительной подсистем синхронизировано и сообщено с оборудованием маршрутно-управленческой подсистемы и обладает автоматически подстраивающимся функционалом по поддержанию потребительского обзора и конечного получения заинтересованным лицом выбранной категории товара.
При этом маршрутно-управленческая подсистема содержит многоцелевой блок управления 3, в состав которого входит блок управления перемещением и локализации (базирования) самой интеллектуальной машины в виде вездеходного транспортного средства 1 и блок управления используемыми стационарными и перемещающимися с возможностью отстыковки (отделения) автономно функционирующими компонентами, базирующимися в упомянутой распределительной торгово-выставочной подсистеме и в упомянутой доставочной исполнительной системе с возможностью временного отделения отдельных модулей от таковых.
Указанные автономно работающие компоненты распределительной торгово-выставочной подсистемы имеют координационно-распределительную часть, которая выполнена в виде, по меньшей мере, одного управляемого манипуляторного роботизированного механизма 32.
Строение манипуляторного роботизированного механизма 32 основано на конструкционном сочетании верхней двух-координатной грузовой площадки 33, нижней координационной площадки 34 и контактной двух-координатной грузовой площадки 36 соответственно. Верхняя двух-координатная грузовая площадка 33 и нижняя координационная площадка 34 являются опорными, а условно третья оборудована между ними и является контактной двух-координатной грузовой площадкой 36. При этом верхняя двух-координатная грузовая площадка 33 расположена в верхней опорной части распределительной торгово-выставочной подсистемы, а нижняя координационная грузовая площадка 34 расположена в нижней опорной части распределительной торгово-выставочной подсистемы и между ними на вертикальной соединительной транспортировочной перемычке 35 установлена упомянутая контактная двух-координатная грузовая площадка 36. Соответственно сконструированный узел имеет возможность, как минимум, продольного перемещения по продольному проходу 24 за счет возможности движения по опорным поверхностям верхней двух-координатной площадки 33 и нижней координационной площадки 34.
Контактная двух-координатная грузовая площадка 36 снабжена исполнительным органом 37, который сконфигурирован для захвата продукции с целью управления ее пространственным положением, в том числе имеется возможность укладки продукции на односторонний стыковочный многоуровневый стеллаж 26 с целью ее наглядного обозрения заинтересованным лицом посредством имеющегося витринного (выставочного) участка 6 распределительной торгово-выставочной подсистемы.
Между верхней двух-координатной площадкой 33 и нижней координационной площадкой 34 на соединительной транспортировочной перемычке 35 установлена дополнительная контактная двух-координатная грузовая площадка 38, оснащенная упаковочным устройством 41 компрессорного типа для обертки комплектов товаров 30 защитным покрытием. Упаковочное устройство компрессорного типа может осуществлять упаковку комплектов товаров или отдельных товаров термоусадочной пленкой, пленкой ПВХ, иным видом пленки или упаковочного материала, а также может осуществлять заполнение упаковки, в которую укладываются товары, наполнителями из пенопласта, ПВХ, бумаги и другими видами наполнителей в зависимости от комплектации.
Таким образом, контактная двух-координатная грузовая площадка 36 и дополнительная контактная площадка 38 образуют единый производственный узел, функционирующий синхронизировано, а также независимо друг от друга в рамках производимой рабочей операции, при этом возможность вращения соединительной транспортировочной перемычки 35 вокруг оси обеспечивает дополнительную функциональность манипуляторному роботизированному механизму 32.
Основание исполнительного органа 37 и основание упаковочного устройства 41 выполнены телескопическими, при этом их рабочие части установлены с возможностью смещения относительно их оснований.
Следует отметить, что конструктивно верхняя двух-координатная площадка 33 состоит, по меньшей мере, из двух опорных поверхностей 40, перемещающихся по верхним направляющим 43 посредством сервоприводов 39. При этом указанное перемещение может быть продольное вперед-назад. На указанных опорных поверхностях 40 поперечно верхним направляющим 43 оборудована соединительная балка, вдоль по которой (от одного борта вездеходного транспортного средства к другому борту) за счет сервоприводов перемещается установленная на ней координатная площадка. Вертикальная соединительная транспортировочная перемычка 35 верхней частью крепится непосредственно к упомянутой координатной площадке.
Нижняя координационная площадка 34 представляет из себя грузовую площадку, выполненную из прочного материала (пластик, металл и т.п.) для целей возможного размещения на ней манипуляторным роботизированным механизмом 32 собранных комплектов товаров 30, оборудованную колесами или роликами для перемещения по напольному участку торгово-выставочной подсистемы 44. Таким образом напольный участок торгово-выставочной подсистемы 44 выступает опорной поверхностью для нижней координационной площадки 34. Перемещение нижней координационной площадки 34 по напольному участку торгово-выставочной подсистемы осуществляется по инерции за счет сервоприводов, приводящих в движение опорные поверхности 40 и координатную площадку, установленную на соединительной балке.
Соответственно весь сконструированный узел манипуляторного роботизированного механизма 32 имеет возможность продольного перемещения по продольному проходу 24 за счет возможности движения по опорным поверхностям верхней двух-координатной площадки 33 и нижней координационной площадки 34 и возможность поперечного перемещения по поперечному проходу 25 за счет возможности движения координатной площадки, к которой крепится вертикальная соединительная транспортировочная перемычка 35, по соединительной балке и движения нижней координационной площадки 34 по опорной поверхности. Таким образом весь сконструированный узел манипуляторного роботизированного механизма 32 имеет возможность перемещаться по всем продольным и поперечным проходам с достаточно высокой позиционной точностью. Конфигурация исполнительного органа 37 контактной двух-координатной грузовой площадки 36 также подразумевает погрузо-разгрузочный позиционный контакт с упомянутыми ранее автономно работающими компонентами доставочной исполнительной системы.
Одна часть упомянутых автономно работающих компонентов доставочной исполнительной системы является автоматизированным вспомогательным оборудованием в виде скоординированных между собой буферных и обладающих возможностью распределения и грузового подъема систем, производящим прохождение, отправку и прием другой из частей, составляющей упомянутые временно отделяемые модули в виде наземных средств перемещения 5 и воздушных средств перемещения 4. В качестве указанных буферных частей следует считать, в частности, лифтовую систему 13 и участок для подготовки подачи на платформу лифта сформированных комплектов товаров с целью их последующей выдачи 14.
Наземные средства перемещения 5 выполнены в виде роботизированных роботов-курьеров, передвигающихся с помощью колесного или ножного движителя 58.
Воздушные средства перемещения 4 выполнены в виде роботов курьеров, использующих воздушные винты 57 или лопасти для перемещения.
Оборудование торгово-выставочной системы предусматривает наличие односторонних 26, двусторонних 27 стыковочных многоуровневых стеллажей, а также торцевые односторонние стеллажи 29 повышенной вместительности, кроме того в состав может входить холодильная секция 23, оборудованная холодильным оборудованием для поддержания приемлемой температуры хранения для скоропортящихся категорий продуктов.
Предлагаемая самоходная интеллектуальная машина для распространения продукции может быть осуществлена, следующим образом.
Следует отметить, что цель последующего описания предлагаемого изобретения заключается не в его ограничении конкретным исполнением и вариантом реализации, а наоборот в охвате всевозможных дополнений, не выходящих за рамки представленной формулы изобретения.
Вездеходное транспортное средство 1 является автономным при эксплуатации и имеет возможность беспилотного управления. Беспилотное управление становится возможным за счет наличия многоцелевого блока управления 3, в состав которого входит блок управления перемещением и определения местоположения (локализации,базирования) транспортного средства. Данный блок снабжен средством доступа в интернет посредством пакетной радиосвязи общего пользования GPRS и приемником сигналов спутниковой навигации GPS/ГЛОНАСС, что позволяет постоянно быть на связи с внешним центром мониторинга и управления и соответственно получать все необходимые навигационные данные, необходимые для построения маршрутов следования с учетом ландшафтных особенностей местности. Беспилотное прохождение маршрутов до пункта назначения контролируется внешним центром мониторинга и управления, параметры движения транспортного средства 1 фиксируются в онлайн режиме во внешнем центре мониторинга и управления и в случае возникновения внештатных ситуаций может быть применен режим ручного дистанционного управления. В случае невозможности продолжения движения к месту остановки транспортного средства 1 направляется автомобиль технического обслуживания с квалифицированным персоналом для возможности перехода на ручное управление для завершения возложенных производственных задач.
Автопилотирование транспортного средства 1 поддерживается программными средствами многоцелевого блока управления 3, который получая сигналы от спутников системы GPS/ГЛОНАСС осуществляет в режиме реального времени координацию дорожных систем транспортного средства. В качестве средств безопасности могут быть применены камеры кругового обзора, камеры слежения за дорожной обстановкой, парковочные радары, датчики движения, лидары и другие вспомогательные системы.
Как уже было обозначено, предлагаемое вездеходное транспортное средство 1 содержит многоцелевой блок управления 3, контролирующий движение и контролирующий работы подвижных, неподвижных, а также временно отделяемых компонентов используемых подсистем. Для движения по бездорожью компоновка транспортного средства 1 вездеходная, используются средства повышенной проходимости 9. В качестве двигательных установок используется электрические, но могут быть применены и двигатели внутреннего сгорания. Конструкционно транспортное средство можно разделить на три уровня - нижний, средний и верхний. На нижнем уровне располагаются отсек 16 для размещения наземных средств перемещения 5, зарядная аккумуляторная станция 8, двигатель 2, а также вспомогательное оборудование для обеспечения перемещений наземных средств перемещений 5. На среднем уровне располагается оборудование распределительной торгово-выставочной и маршрутно-управленческой подсистем (многоцелевой блок управления 3, стеллажи 26, 27, 29, погрузочно-разгрузочный участок 28, манипуляторный роботизированный механизм 32, витринный участок 6, лифтовая система для перемещения товаров 13). На верхнем уровне находится отсек 15 для размещения воздушных средств перемещения 4, а также вспомогательное оборудование для стыковки и координаций движений средств перемещения 4 и другое техническое оборудование.
Перед началом следования по согласованному маршруту в распределительном складском центре производится погрузка групп стеллажей 7 распределительной торгово-выставочной подсистемы. Погрузка осуществляется с помощью погрузчика 59, который расставляет группы несформированных стеллажей 7 в пространстве упомянутой подсистемы, формируя односторонние многоуровневые стеллажи 26, двусторонние 27, а также торцевые стеллажи 29 повышенной вместительности. Группы несформированных стеллажей 7 доставляются внутрь вездеходного средства 1 через витринный (выставочный) участок 6, который на время погрузо-разгрузочных работ трансформируется и обеспечивает свободный проход.
Комплектация стеллажами может меняться, однако, между стеллажами должны быть продольные 24 и поперечные 25 проходы для перемещения манипуляторного роботизированного механизма 32.
Распределительный складской центр представляет из себя большую сортировочную станцию, обслуживающую большие территории с населением, нуждающимся в получении различной продукции, в том числе свежей пищевой продукции.
Группы продукции заранее расставлены в ячейки 31 несформированных стеллажей 7, которые в последствии образуют стеллажи 26, 27 и 29 (например, в одну ячейку расставлены пачки сока определенного вида, в другую ячейку - пачки снеков определенного вида, в третью ячейку - пачки кетчупа определенного вида и так далее расставлена в том числе и непищевая продукция). Таким образом ячейки 31 отличаются размером и содержанием. Компоновка стеллажей группами продукции, как правило, производится с учетом мнения и потребностей населения, проживающего в определенных отдаленных участках местности и на основании проведенных исследований статистических данных приобретения товаров на конкретной территории.
Перед расстановкой групп продукции в ячейки 31 несформированных стеллажей 7 каждая продукция сканируется, и записи о соответствии продукции определенным ячейкам 31 заносятся в многоцелевой блок управления 3, в который также попадают сведения о точном количестве продукции в ячейке, его ассортименте в ячейке 31, его описании и сроке годности (для пищевой продукции).
Следует отметить, что после расстановки групп несформированных стеллажей 7 и формирования стеллажей 26, 27 и 29 зафиксированная в распределительном центре связь групп продукции с определенными ячейками 31 стеллажей 26, 27 и 29 посредством блока управления 3 также поступает на сервер внешнего центра управления. Указанная связь устанавливается путем считываний сканером QR-кодов или штрих-кодов, нанесенных на соответствующие ячейки несформированных стеллажей 7.
С учетом основной цели назначения роботизированного вездеходного комплекса - хранение и отпуск продукции - продукция, расставленная в ячейки 31 и информация о которой занесена в многоцелевой блок управления 3 и передана на сервер внешнего центра управления, идентифицируется как товар, находящийся в ячейке с группами товаров 31.
Получаемая тем самым внутренняя система хранения групп товаров, рассредоточенная в распределительной торгово-выставочной подсистеме содержит большое количество ячеек с группами товаров 31, которые могут отличаться размерами, однако, большинство из них стандартизированы под наиболее востребованные размеры товаров, что определено практикой работы служб доставки и наработанной базой данных о товарах, наиболее часто приобретаемых в конкретном регионе. Ячейки с группами товаров 31 подразделяются на ячейки сверх мелкого, мелкого, среднего, крупного, сверхкрупного и нестандартного размера.
В распределительном складском центре помимо загрузки и сканирования продукции, также осуществляется занесение информации о маршруте, координатах пункта назначения, условий местности и других параметров маршрута в многоцелевой блок управления 3. Программное обеспечение многоцелевого блока управления 3 обрабатывает информацию, направляет ее во внешний центр управления и после согласования условий маршрута и готовности вездеходного транспортного средства 1 разрешается отбытие к пункту назначения для реализации содержимого.
Вездеходное транспортное средство 1 под контролем внешнего центра управления отправляется по согласованному маршруту к точке назначения. По пути к пункту назначения блок управления перемещением и локализации транспортного средства многоцелевого блока управления 3 повторно сверяет координаты назначения и благодаря приемнику навигационного спутникового сигнала GSM/ГЛОНАСС создает оптимальную маршрутную карту, исходя из отдаленности пункта и возможностей беспрепятственного подъезда к нему.
Блок управления перемещением и локализации многоцелевого блока управления 3 оснащен процессором, запрограммированным, в частности, для возможности подсчета оптимального числа комплектов товаров 30, в том числе, опираясь на информацию о возможно заказанных заранее комплектов товаров, для возможности расчета оптимального количества наземных 5 и воздушных 4 средств перемещения, а также для возможности проверки работоспособности необходимых наземных 5 и воздушных 4 средств перемещения. На основании полученных данных, блок управления 3, используя выработанную математическую модель подсчета, выбирает оптимальное точное место базирования вездеходного транспортного средства 1 и оптимальные параметры работы стационарного, перемещающегося и отделяемого оборудования (стеллажи 26, 27 и 29, манипуляторный роботизированный механизм 32, воздушные средства перемещения 4, наземные средства перемещения 5, лифтовая система 13 и др.).
Важно упомянуть, что после окончания комплектования вездеходного транспортного средства 1 в распределительном складском центре и когда начался процесс движения, с помощью многоцелевого блока управления 3, в частности, определяется контрольное время прибытия и развертывания оборудования, вырабатывается схема выставления продукции на обозрение посредством ее размещения на одностороннем стыковочном многоуровневом стеллаже 26, который просматривается через витринный (выставочный) участок 6, определяется предельно допустимая дальность перемещения средств перемещения 4 и 5. Таким образом, система управления предлагаемым вездеходным транспортным средством 1 определяет примерные энергетические и временные затраты на выполнение производственной операции по эффективной реализации продукции за одну целевую поездку.
По прибытии на установленное место реализации продукции, вездеходное транспортное средство 1, приступает к ее реализации.
Итак, управление производственным процессом, заключающимся в передаче продукции, а также представлении ее для обзора, осуществляется связанным посредством сети интернет с внешним управляющим центром многоцелевым блоком управления 3. Блок управления 3 содержит отдельный системный блок управления используемыми стационарными и перемещающимися с возможностью временного отделения автономно функционирующими компонентами. Блок управления 3 содержит программное обеспечение, посредством которого обеспечивается передача информации о поступающих заказах и о работе оборудования системы.
Основным алгоритмом реализации продукции является стационарная продажа по факту прибытия вездеходного транспортного средства 1 на установленное место. Вездеходное транспортное средство 1 со своей внешней стороны может содержать соответствующие вывески и обозначения, указывающие на назначение указанного транспортного средства, также оно может быть тематически окрашено. Таким образом потенциальные потребители узнают о назначении роботизированного комплекса и могут совершать покупки.
Предложение продукции к продаже осуществляется через витринный (выставочный) участок 6 путем выставления продукции на обозрение либо дистанционным способом посредством передачи информации о торговом ассортименте по сети Интернет или иной беспроводной связью потребителям, подключенным к сети реализации самоходной интеллектуальной машины, также предложение продукции может осуществляться другими способами, в том числе путем размещения с внешней стороны вездеходного транспортного средства 1 в зоне витринного (выставочного) участка 6 специального терминала (например, сенсорного экрана), оснащенного программным обеспечением по выбору и формированию корзины заказанной продукции из актуального ассортимента продукции, а также терминал оплаты.
Кроме того, продажа осуществляется посредством заказа продукции через сеть Интернет или посредством иной беспроводной связи дистанционным способом с последующей доставкой продукции потребителю с помощью наземных 5 и воздушных 4 средств перемещения.
Сведения о заказе определенной продукции поступают посредством программного обеспечения в многоцелевой блок управления 3 и/или внешний управляющий центр.
Выдача продукции, приобретенной на месте расположения вездеходного транспортного средства 1, либо доставка продукции, приобретенной дистанционным способом, осуществляется посредством наземного 5 и/или воздушного 4 средства перемещения.
Итак, после того, как многоцелевой блок управления 3 и/или внешний управляющий центр получат сведения о заказе определенной продукции, которая выставлена на обозрение посредством витринного выставочного участка 6, или имеется в наличии в ячейках с группами товаров 31 на стеллажах 26, 27 или 29, упомянутый отдельный системный блок управления 3, обрабатывая полученный сигнал формирует согласно заложенному алгоритму действий команду манипуляторному роботизированному механизму 32 для подготовки к изъятию из ячеек с группами товаров 31, формированию комплекта товаров 30 и выдаче соответствующего комплекта товаров 30.
Манипуляторный роботизированный механизм 32 имеет технические возможности автономной системы и находится в постоянном беспроводном контакте с блоком управления 3 и с внешним управляющим центром.
Формирование комплекта товаров 30 происходит в зоне погрузочно-разгрузочного участка 28, в которой хранится упаковка в виде, например, коробок различной формы и размера. Выбор нужной упаковки, раскладка товаров внутри упаковки, в том числе покрытие определенного товара внутри комплекта защитным покрытием посредством упаковочного устройства 41, происходит согласно алгоритму, который каждый раз разрабатывается системным блоком многоцелевого блока управления 3 на основании сведений о поступившем заказе.
Итак, получая определенный сигнал о необходимости подбора упаковки определенных размера и формы, манипуляторный роботизированный механизм 32 изымает из соответствующей ячейки в соответствии с направленным ему алгоритмом упаковку нужного размера и формы и устанавливает ее в зоне погрузочно-разгрузочного участка 28. Далее, получая сигнал о необходимости подбора одного или нескольких товаров, передвигаясь, в частности, по продольным проходам 24 и поперечным проходам 25, манипуляторный роботизированный механизм 32 находит нужную ячейку 31 с соответствующим заказу товаром и изымает товар с помощью исполнительного органа 37, выполняемого в виде манипуляторного захватного элемента, имеющего подвижные обжимные участки, удерживающие груз.
Далее при поступлении соответствующего сигнала от системного блока многоцелевого блока управления 3 товар может быть покрыт защитным покрытием посредством упаковочного устройства 41, которое имеет сопло для нанесения защитного покрытия (например, термоусадочной пленкой, пленкой ПВХ, иным видом пленки или упаковочного материала), а также может осуществлять заполнение упаковки, в которую укладываются товары, наполнителями из пенопласта, ПВХ, бумаги и другими видами наполнителей.
После чего манипуляторный роботизированный механизм 32, удерживая товар с помощью исполнительного органа 37, подъезжает в зону погрузочно-разгрузочного участка 28 и укладывает товар в упаковку. Алгоритм повторяется до тех пор, пока все товары из поступившего заказа не будут собраны в упаковку. После чего манипуляторный роботизированный механизм 32 закрывает упаковку и передает сведения о готовности к выдаче сформированного комплекта товаров 30 в многоцелевой блок управления 3. Следует отметить, что все упаковки идентифицируются с помощью штрих-кодов или других обозначений, которые могут быть нанесены на них заранее в распределительном складском центре, либо могут наноситься непосредственно манипуляторным роботизированным механизмом 32 в зоне погрузочно-разгрузочного участка 28 после завершения упаковки товаров.
Получая информационный сигнал о готовности к выдачи комплекта товаров 30, многоцелевой блок управления 3 активирует действие соответствующего наземного средства перемещения 5 или воздушного средства перемещения 4, которые в это время находятся внутри вездеходного транспортного средства на своих стыковочных местах в отсеках 16 и соответственно 15.
В качестве наземных средств перемещения 5 могут быть применены известные разработки, в частности, например, роботы Marathon Robotics или Gita, Piaggio (см. http://robotrends.ru/robopedia/ulichnye-roboty-kurery).
В качестве воздушных средств перемещения 4 могут быть применены известные разработки, в частности, например, модели компании Aerones (см. https://rg.ru/2017/05/15/na-video-sniali-pervyj-pryzhok-cheloveka-s-drona.html).
Применяемые в данном изобретении средства перемещения 4 и 5 обладают всеми средствами для ведения записи и передачи информации с целью оказания информационно-посреднических услуг (камеры наблюдения, средства связи, исполнительные органы, средства удержания и захвата товара, энергонезависимую память и др.)
Автономные используемые средства перемещения - наземные 5 и воздушные 4 снабжены устройством доступа в интернет, например, посредством мобильной связи (сим-карты), что позволяет им быть постоянно на связи с многоцелевым блоком управления 3 и с внешним управляющим центром. Кроме того, используемые средства перемещения снабжены модулями GPS/ГЛОНАСС и информация может передаваться как на блок управления 3, так и на внешний управляющий центр.
Автономное средство перемещения, в зависимости от параметров комплекта товаров (размер, вес, форма) и сформированного алгоритма доставки, например, воздушное средство перемещения 4, обладая всем необходимым функционалом для автономности работы посредством воздушного винта 57 взлетает и отделяется от магнитного крепления 48, далее согласно заложенному в микропроцессоре алгоритму либо согласно алгоритму, переданному ему блоком управления 3, перемещается через технологический проход для транспортировки воздушных средств перемещения 47 и поступает в проем лифтовой системы 13 под нижним пропускным люком 12 и ожидает, когда комплект товаров 30, установленный по команде манипуляторным роботизированным механизмом 32 на подвижную платформу лифтовой системы 13, поднимется до уровня отсека 15, выйдет за пределы шахты лифта и состыкуется с воздушным 4 средством перемещения посредством активирующейся в момент стыковки магнитной системы, имеющей взаимодействующие между собой части, расположенные как на комплекте товаров 30, так и на самом воздушном средстве перемещения 4 (крепление может быть выполнено иным способом).
Как альтернативный вариант, воздушные 4 средства перемещения могут перемещаться в отсеке 15 с помощью дополнительного манипуляторного роботизированного механизма 50, который выполнен в виде конструкционного сочетания первой опорной площадки 53, второй опорной площадки 54 и контактной площадки 55. При этом опорные площадки 53 и 54 двигаются по горизонтальным продольным направляющим 60 и соединены транспортировочной перемычкой 52, на которой установлена упомянутая контактная площадка 55, которая имеет возможность смещения вдоль транспортировочной перемычки 52 и поворота и оснащена исполнительным органом 56, имеющим захватное контактное магнитное устройство для временного удержания и перемещения воздушных средств перемещения 4.
Если из группы автономных средств перемещения выбирается наземное средство перемещения 5, то, согласно поступившей ранее команде, оно самостоятельно передвигается по отсеку 16 и ожидает непосредственно возле шахты лифтовой системы 13. Когда манипуляторный роботизированный механизм 32 посредством исполнительного органа 37 сдвинет комплект товаров 30 через участок для подачи 14 на подвижную платформу лифтовой системы 13, платформа опускается вниз и комплект товаров 30 пройдя защитный барьер устанавливается на рабочую площадку наземного средства перемещения 5 и фиксируется посредством уже указанной магнитной системы.
Итак, наземное 5 и воздушное 4 средства перемещения готовы передать готовый комплект товаров 30 получателю.
С помощью автоматически последовательно открывающихся нижнего пропускного люка 12 и верхнего люка 11 воздушное средство перемещения 4 с комплектом товаров 30 выходит наружу и производит поиск пространственного положения и маршрута в рамках производимой рабочей операции.
Наземное средство перемещения 5, обладает всем необходимым функционалом для автономности работы, и самостоятельно, получая сигнал управления, по заложенному программному алгоритму выходит из отсека 16 и проходит наружу через шлюз 17 по выдвижному трапу 18 и также осуществляет поиск пространственного положения и маршрута в рамках производимой рабочей операции.
На данном этапе у этой группы автономных средств перемещения (группа готовая передать продуктовый комплект) есть заблаговременно полученные необходимые сведения о получателе, в том числе, видеоданные, которые позволят его идентифицировать и передать комплект товаров 30 по назначению, либо есть сформированный многоцелевым блоком управления 3 маршрут к месту доставки комплекта товаров 30 и идентифицирующие данные получателя продукции.
На корпусе наземных 5 и воздушных 4 средств перемещений установлены модули для работы с NFC компонентами, а также видеокамеры для считывания QR-кодов, Штрих-кодов и др. Наземное 5 или воздушное 4 средство перемещения производя пространственный поиск - устанавливает получателя, сопоставляет фактически определенные параметры с полученными при заказе продукции данными и, при наличии соответствия, отдается команда по размагничиванию системы удержания комплекта товаров 30, отдавая последний непосредственно в руки получателю. При этом сигнал об идентификации получателя поступает на многоцелевой блок управления 3 и во внешний управляющий центр, весь процесс получения комплектов товаров фиксируется видеокамерой средств перемещения 4 и 5, после чего информация направляется в блок управления 3 и на внешний управляющий центр для временного хранения в качестве доказательства произведенного получения во избежание каких-либо спорных моментов. Вместе с тем зафиксированная информация о получении комплекта товаров 30 используется внешним управленческим центром для последующего формирования квитанции и ее отправки любым доступным способ по адресу нахождения получателя. Кроме того, идентификация получателя может производиться и путем считывания с устройства получателя специального кода (например, QR кода), сформированного программой приема и обработки заказов многоцелевого блока управления 3 и/или внешним управляющим центром.
Далее наземные 5 и воздушные 4 средства перемещения могут быть отправлены обратно в вездеходное транспортное средство 1 для базирования и подзарядки или для получения следующих выбранных другим пользователем комплектов товаров 30.
Исполнившее задачу наземное средство перемещения 5 проходит в обратной последовательности в вездеходное транспортное средство 1, т.е. поднимается по выдвижному трапу 18 и через шлюз 17 попадает в отсек 16, где, либо занимает свободный посадочный участок 20 и заряжается посредством контактного элемента 21 либо размещается в зоне шахты лифтовой системы в ожидании нового комплекта товаров 30.
Исполнившее задачу воздушное средство перемещения 4 также в обратной последовательности проходит в вездеходное транспортное средство 1 через верхний люк 11 и нижний пропускной люк 12, где возле шахты лифтовой системы 13 ожидает новый комплект товаров 30 или проходит вдоль отсека 15 и занимает свободный участок, в пределах которого посредством контактного элемента 49 производит подзарядку аккумуляторной батареи.
Следует отметить, когда наземное 5 или воздушное 4 средство перемещения перемещается внутри вездеходного транспортного средства 1 и начинает покидать его пределы или заходит на посадку с целью базирования или пополнения комплектом товаров, происходит передача сигналов в многоцелевой блок управления 3 и во внешний управляющий центр, это происходит посредством беспроводной передачи данных, в этот момент инициируется программа безопасного маневрирования, а именно:
- средства перемещения 4 и 5 при необходимости включают световые и звуковые сигналы, сигнализирующие движение и появление;
- электронные средства обзора средств перемещения 4 и 5 производят эффективную видеосъемку окружения для безопасности маневрирования;
- получаемые видеоданные анализируются программным обеспечением многоцелевого блока управления 3 на предмет наличия движущихся объектов (люди, животные и пр.);
- в случае наличия каких-либо препятствий средства перемещения 4 и 5 перемещаются в сторону, заново производится анализ окружения посредством мини-компьютеров самих средств перемещения и многоцелевого блока управления 3.
По завершении продажи и выдачи всей продукции все средства перемещения 4 и 5 возвращаются в свои отсеки 15 и 16, вездеходное транспортное средство 1 сообщает об этом во внешний управленческий центр и после получения разрешения на отбытие интеллектуальная машина возвращается обратно в распределительный центр для подготовки к новой поездке. Так же команда на возврат всех средств перемещения 4 и 5 в свои отсеки 15 и 16 и отбытие вездеходного транспортного средства 1 в распределительный центр может быть отдана внешним управленческим центром исходя из аналитики остатков продукции в вездеходном транспортном средстве 1 либо по техническим причинам.
Одним из возможных алгоритмов распространения продукции является таргетированный или целенаправленный поиск потенциального потребителя. В частности вездеходное транспортное средство 1, посредством синхронизированной работы блока управления 3 и внешнего управляющего центра производит проверку/сканирование окружающего пространства, и в случае фиксации, посредством цифровых средств видео-контроля, потенциального потребителя, направляет посредством заложенного программного алгоритма сигналы управления в управляющие мини-компьютеры наземного 5 и/или воздушного 4 средства перемещения.
Получив первичный управляющий сигнал, наземному средству перемещения 5 и/или воздушному средству перемещения 4 необходимо выйти наружу для коммуникации с потенциальными потребителями (заинтересованными лицами, желающими получить продукцию).
Выход наземного средства перемещения 5 и/или воздушного средства перемещения 4 из вездеходного транспортного средства 1 осуществляется по алгоритму, описанному выше, за исключением части прикрепления комплектов товаров 30 к наземному средству перемещения 5 и/или воздушному средству перемещения 4.
Оказавшись вблизи заинтересованного лица воздушное средство 4 или наземное средство 5 за счет имеющегося технического функционала производят коммуникацию, в том числе аудио или видео коммуникацию в формате презентации ассортимента, имеющихся товаров. Презентация проходит в рамках имеющегося программного обеспечения, позволяющего потребителю за счет работы аппаратных средств автономных средств перемещения 4, 5 определить для себя интересующий вид и число товаров и осуществить голосовой или письменный заказ (посредством устройства ввода информации) о желании приобретения соответствующих товаров. Оплата товаров производится либо непосредственно с помощью терминала самоходного вездеходного средства 1 либо с помощью установленного потребителем на свое мобильное устройство программного обеспечения.
После фиксации и обработки сигнала, касающегося поступившего заказа продукции, воздушное 4 и/или наземное 5 средство перемещения по заложенному программному алгоритму направляет сигнал о формировании комплекта товаров 30 в многоцелевой блок управления 3 и/или во внешний управляющий центр. Далее многоцелевой блок управления 3 и/или во внешний управляющий центр направляют соответствующие сигналы распределительной торгово-выставочной подсистеме и доставочной исполнительной подсистеме о формировании комплектов товаров 30 и выдаче либо доставке их потребителям, согласно алгоритму, описанному выше для выдачи товара, приобретенного на месте расположения вездеходного транспортного средства 1, либо доставки товара, приобретенного дистанционным способом.
Указанные ранее группы автономных средств перемещения (участвующие в таргетированном или целенаправленном поиске потенциального потребителя и принятии “заказа”) также могут периодически отправляться обратно по месту базирования самоходного транспортного средства 1 и осуществлять подзарядку аккумуляторных систем. Вместо них для “принятия заказов” могут быть высланы другие средства перемещения 5 и 4, находящиеся в это время в режиме ожидания либо подзарядки.
Используемые группы автономных средств перемещения (средства перемещения 4 и 5) могут быть взаимозаменяемыми и выполнять друг за друга широкий спектр задач в рамках производимых рабочих операций.
Предлагаемое изобретение может найти широкое применение в области перевозок и может быть использовано для снабжения продукцией населения, проживающего в отдаленных от крупных населенных пунктов местах.
Изобретение относится к области передвижных интеллектуальных систем, предназначенных для работы в сфере распространения наиболее востребованных категорий продуктов у потребителей, проживающих за пределами границ городских поселений. Самоходная машина для распространения продукции выполнена в виде предпочтительно внедорожного грузового, как правило, с беспилотным управлением транспортного средства (1). Транспортное средство (1) распределено на взаимодействующие между собой маршрутно-управленческую подсистему, распределительную торгово-выставочную подсистему и доставочную исполнительную подсистему с дистанционным контролем функционирования оборудования. Маршрутно-управленческая подсистема содержит блок управления перемещением транспортного средства (1) и блок управления используемыми стационарными и перемещающимися с возможностью отделения автономно функционирующими компонентами, базирующимися в распределительной торгово-выставочной подсистеме и в доставочной исполнительной системе с возможностью временного отделения отдельных модулей от таковых. Координационно-распределительная часть указанных автономно работающих компонентов распределительной торгово-выставочной подсистемы выполнена в виде по меньшей мере одного управляемого манипуляторного роботизированного механизма, имеющего исполнительный орган для захвата продукции с целью управления ее пространственным положением, для обозрения и последующего погрузо-разгрузочного контакта с указанными автономно работающими компонентами доставочной исполнительной системы, одна часть которых является автоматизированным вспомогательным оборудованием, производящим прохождение, отправку и прием другой из частей, составляющей упомянутые временно отделяемые модули в виде наземных (5) и воздушных (4) средств перемещения. Обеспечивается высокая скорость и точность подготовки выбранных продуктовых комплектов. 9 з.п. ф-лы, 8 ил.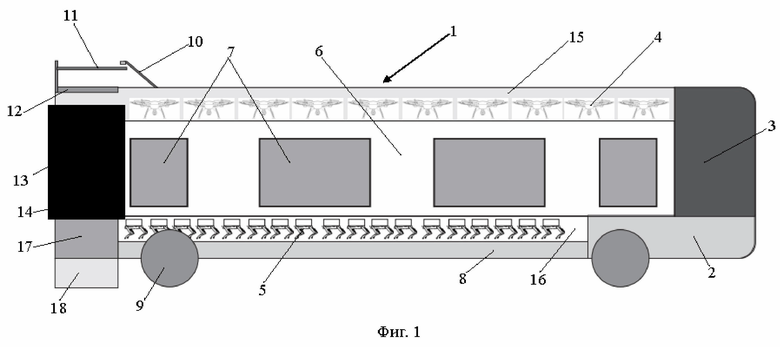
1. Самоходная интеллектуальная машина для розничного распространения выставленной на обозрение продукции, предназначенной для потребителя, преимущественно находящегося вне пределов инфраструктурных поселений, выполненная в виде предпочтительно внедорожного грузового, как правило, с беспилотным управлением транспортного средства, системно распределенного на взаимодействующие между собой маршрутно-управленческую подсистему, распределительную торгово-выставочную подсистему и доставочную исполнительную подсистему, объединение которых формирует автономную и условно рассредоточенную, преимущественно популяризационную раздаточную структуру, имеющую возможность дистанционного контроля функционирования отделяемого и стационарного автономно работающего оборудования, обладающего автоматически подстраивающимся функционалом по поддержанию потребительского обзора и конечного получения выбранной категории товара, при этом маршрутно-управленческая подсистема содержит блок управления перемещением и локализации транспортного средства и блок управления используемыми стационарными и перемещающимися с возможностью отделения автономно функционирующими компонентами, базирующимися в распределительной торгово-выставочной подсистеме и в доставочной исполнительной системе с возможностью временного отделения отдельных модулей от таковых, причем координационно-распределительная часть указанных автономно работающих компонентов распределительной торгово-выставочной подсистемы выполнена в виде по меньшей мере одного управляемого манипуляторного роботизированного механизма, строение которого основано на конструкционном сочетании выполненных с возможностью перемещения опорной верхней двухкоординатной грузовой площадки и опорной нижней координационной площадки, между которыми на соединительной транспортировочной перемычке оборудована как минимум одна контактная двухкоординатная грузовая площадка, снабженная исполнительным органом, сконфигурированным для захвата продукции с целью управления ее пространственным положением, в том числе создавая возможность ее наглядного обозрения посредством имеющегося витринного участка, а также с целью последующего погрузо-разгрузочного позиционного контакта с указанными автономно работающими компонентами доставочной исполнительной системы, одна часть которых является автоматизированным вспомогательным оборудованием в виде скоординированных между собой буферных и обладающих возможностью распределения и грузового подъема систем, производящим прохождение, отправку и прием другой из частей, составляющей упомянутые временно отделяемые модули в виде наземных и воздушных средств перемещения, для которых предусмотрены стационарные посадочные участки, поддерживающие работоспособность, предусматривающую возможность стыковки/расстыковки с выбранной пользователем продукцией и поиск пространственного положения в рамках производимой рабочей операции.
2. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что между опорной верхней двухкоординатной грузовой площадкой и опорной нижней координационной площадкой манипуляторного роботизированного механизма установлена дополнительная контактная двухкоординатная грузовая площадка, оснащенная упаковочным устройством компрессорного типа для обертки продукции защитным покрытием.
3. Самоходная интеллектуальная машина по п. 2, отличающаяся тем, что контактные двухкоординатные грузовые площадки манипуляторного роботизированного механизма установлены на поворотной стойке, производящей вращение вокруг оси.
4. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что контактная двухкоординатная грузовая площадка манипуляторного роботизированного механизма содержит дополнительный исполнительный орган, установленный с возможностью смещения рабочей части относительно основания.
5. Самоходная интеллектуальная машина по п. 4, отличающаяся тем, что основания исполнительных органов выполнены телескопическими, а рабочие части оснащены обжимными захватными элементами.
6. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что наземные средства перемещения выполнены в виде роботизированных роботов-курьеров, передвигающихся с помощью колесного или ножного движителя.
7. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что воздушные средства перемещения выполнены в виде роботов-курьеров, использующих воздушные винты для перемещения.
8. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что распределительная торгово-выставочная подсистема содержит в составе холодильную секцию.
9. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что снабжена выдвижным трапом для наземных средств перемещения.
10. Самоходная интеллектуальная машина по п. 1, отличающаяся тем, что манипуляторный роботизированный механизм оснащен цифровым средством видеонаблюдения за контролем процессов перемещения и подготовки к передаче продуктовых комплектов.
| CN 207345649 U, 11.05.2018 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| CN 112561623 A, 26.03.2021 | |||
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ МОНОЛИТНЫХ ОБЪЕМНЫХ БЛОКОВ | 0 |
|
SU186320A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

