Предполагаемое изобретение относится к машиностроению и может быть использовано в приводах возвратно-поступательно движения различных машин, в частности в приводах возвратно-поступательного перемещения столов плоскошлифовальных станков, а так же станков для лазерной вырезки и 3D-принтеров.
Известен реверсивный механизм для преобразования вращательного движения в поступательное, содержащий корпус, направляющие ползуна, ползун, установленные на осях в корпусе паразитные шкивы, установленные на осях на ползуне два отклоняющих шкива, первый и второй дифференциальные шкивы, закрепленные на валах в корпусе и соединенные между собой механической передачей вращения с реверсивным приводом, бесконечный ремень, охватывающий паразитные, отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего отклоняющие шкивы, установленные на ползуне, параллельны между собой, причем произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1, при этом дополнительно на осях в корпусе и ползуне установлены по два отклоняющих шкива, охватывая которые, ремень образует дополнительные петли с параллельными ветвями (Патент РФ №2568004С2 Заявл. 21.01.2014, Опубл. 10.11.2015 Бюл. №31, п. 1 формулы изобретения).
Данный механизм обладает высокой жесткостью и большой нагрузочной способностью, обусловленной использованием четырех ветвей ремня для создания приводной силы, действующей на ползун. Недостатком его являются большие габариты ползуна, ограничивающие его область использования.
Известен также реверсивный механизм для преобразования вращательного движения в поступательное, содержащий корпус, направляющие ползуна, ползун, оппозитно расположенные на валах в корпусе два отклоняющие шкива, один из которых связан с реверсивным приводом, первый и второй дифференциальные шкивы, установленные на валах на ползуне и связанные между собой механической передачей вращения, установленные на осях на ползуне паразитные шкивы, бесконечный ремень, охватывающий паразитные, отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего отклоняющие шкивы, установленные в корпусе, параллельны между собой, причем каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов, а произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1 (Заявка на выдачу патента DE 3809400, кл. B23Q 5/027; В24В 47/04, В24В 47/20; F16H 19/06, 1988 г., пункты 1-3, 5-7, 9, 11, 12 формулы изобретения, фиг. 1, 3, 5).
Недостатком данного механизма являются низкая жесткость, обусловленная использованием только двух рабочих ветвей приводного ремня.
Наиболее близким к заявляемому является реверсивный механизм для преобразования вращательного движения в поступательное, содержащий корпус, направляющие ползуна, ползун, первый и второй дифференциальные шкивы, установленные на валах в корпусе и соединенные между собой механической передачей вращения с реверсивным приводом, первый и второй отклоняющие шкивы, установленные на осях в корпусе оппозитно соответствующим дифференциальным шкивам, установленные на осях на ползуне два отклоняющих шкива, бесконечный ремень, охватывающий отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего дифференциальные и отклоняющие шкивы параллельны между собой, при этом каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов или отклоняющих шкивов, установленных в корпусе, при этом произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1. (Патент US 6134978, кл. F16H 27/02, 1997 г., пп. 1, 2 и 3 формулы изобретения, прототип).
Недостатками данного механизма являются низкая жесткость, обусловленная использованием только двух рабочих ветвей приводного ремня, и значительная протяженность ненагруженных ветвей ремня, способствующая развитию его колебаний, снижающих плавность и точность перемещений.
Технической задачей предполагаемого изобретения является повышение жесткости и точности позиционирования реверсивного механизма за счет увеличения числа рабочих ветвей приводного ремня, а также повышение плавности перемещений за счет снижения колебаний ремня путем уменьшения длин ненагруженных ветвей ремня.
Поставленная задача достигается тем, что в реверсивном механизме для преобразования вращательного движения в поступательное, содержащем корпус, направляющие ползуна, ползун, первый и второй дифференциальные шкивы, установленные на валах в корпусе и соединенные между собой механической передачей вращения с реверсивным приводом, первый и второй отклоняющие шкивы, установленные на осях в корпусе оппозитно соответствующим дифференциальным шкивам, установленные на осях на ползуне два отклоняющих шкива, бесконечный ремень, охватывающий отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего дифференциальные и отклоняющие шкивы параллельны между собой, при этом каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов или отклоняющих шкивов, установленных в корпусе, при этом произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1, дополнительно на ползуне установлены третий и четвертый дифференциальные шкивы, взаимодействующие с ветвями ремня, связывающими соответственно первый дифференциальный и первый отклоняющий шкив, установленный в корпусе, а также второй дифференциальный и второй отклоняющий шкив, установленный в корпусе, при этом третий и четвертый дифференциальные шкивы связаны между собой механической передачей вращения с передаточным отношением
где D1, D2 - диаметры первого и второго дифференциальных шкивов; D3, D4 - диаметры третьего и четвертого дополнительных дифференциальных шкивов, установленных на ползуне и связанных с механической передачей вращения; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
Новым в предложенном решении является то, что в известном реверсивном механизме для преобразования вращательного движения в поступательное дополнительно на ползуне установлены третий и четвертый дифференциальные шкивы, взаимодействующие с ветвями ремня, связывающими соответственно первый дифференциальный и первый отклоняющий шкив, установленный в корпусе, а также второй дифференциальный и второй отклоняющий шкив, установленный в корпусе, при этом третий и четвертый дифференциальные шкивы связаны между собой механической передачей вращения с передаточным отношением
где D1, D2 - диаметры первого и второго дифференциальных шкивов; D3, D4 - диаметры третьего и четвертого дополнительных дифференциальных шкивов, установленных на ползуне и связанных с механической передачей вращения; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
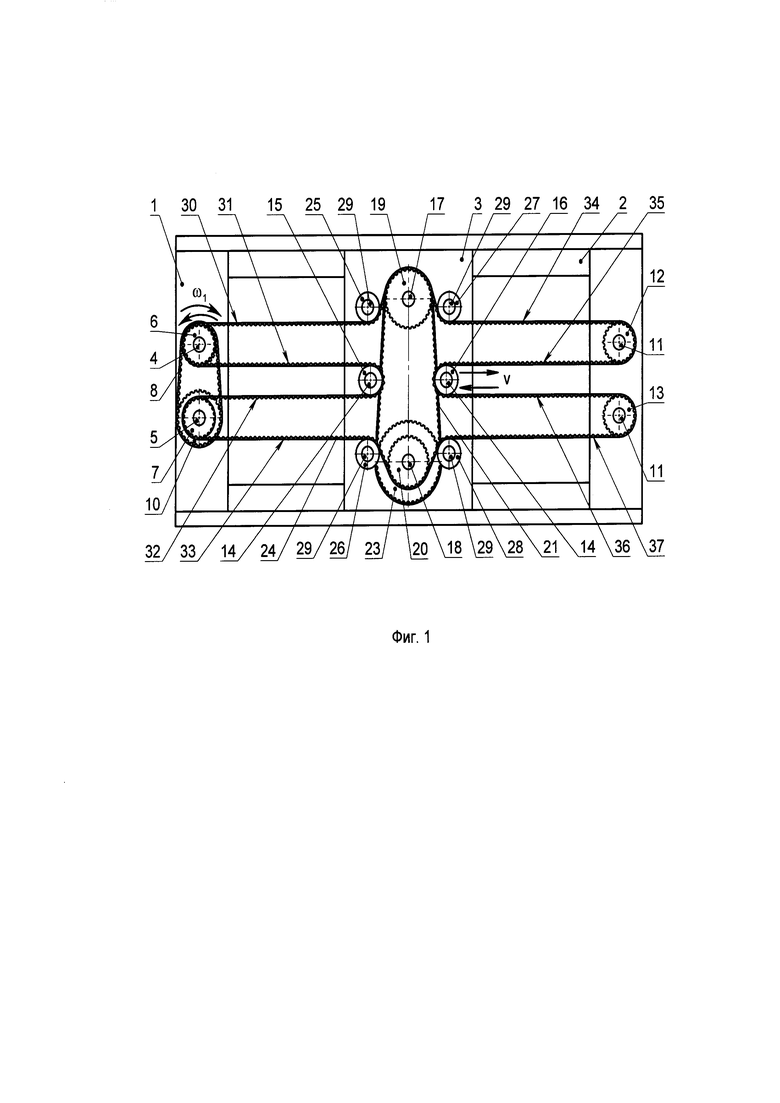
На фиг. 1 показана фронтальная проекция предлагаемого устройства;
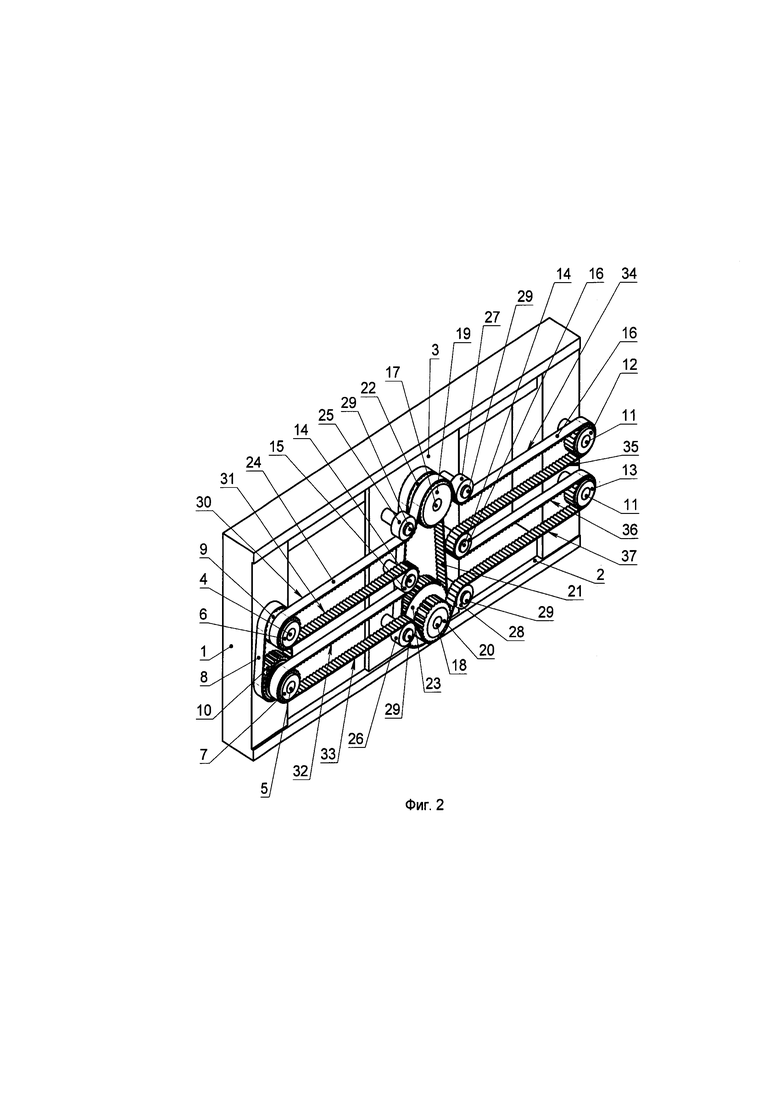
На фиг. 2 - аксонометрическая проекция, наглядно показывающая расположение приводных ремней и шкивов устройства.
Предлагаемое устройство состоит из корпуса 1, в прямолинейных направляющих 2 которого закреплен ползун 3. В корпусе 1 расположены также валы 4 и 5 с первым 6 и вторым 7 дифференциальными шкивами. Валы 4 и 5 соединены механической передачей вращения с передаточным отношением i1,2. В данном примере реализации устройства механическая передача представляет собой передачу зубчатым ремнем 8, охватывающим шкивы 9, 10, жестко соединенными соответственно с валами 4, 5. Передаточное отношение передачи составляет

где Dt1 - диаметр шкива 9; Dt2 - диаметр шкива 10.
Для работы механизма произведение отношения диаметров дифференциальных шкивов 6, 7 и передаточного отношения механической передачи вращения i1,2 должно иметь значение, отличное от 1

где D1 - диаметр первого дифференциального шкива 6; D2 - диаметр второго дифференциального шкива 7.
На противоположных сторонах корпуса 1 оппозитно дифференциальным шкивам 6, 7 на осях 11 установлены первый и второй отклоняющие шкивы 12, 13.
На ползуне 3 установлены оси 14 отклоняющих шкивов 15 и 16, а также валы 17, 18 жестко связанные с третьим 19 и четвертым 20 дифференциальными шкивами.
Валы 17, 18 жестко связаны с механической передачей вращения с передаточным отношением i3,4. В данном примере реализации устройства механическая передача представляет собой передачу зубчатым ремнем 21, охватывающим шкивы 22, 23, жестко соединенными соответственно с валами 17, 18. Передаточное отношение передачи в этом случае составляет

где Dt3 - диаметр шкива 22; Dt4 - диаметр шкива 23.
Шкивы 6, 7, 12, 13, 15, 16, 19, 20 охватывает зубчатый ремень 24.
Для увеличения угла охвата дифференциальных шкивов 19, 20 зубчатым ремнем 24 предназначены паразитные шкивы 25, 26 и 27, 28, установленные на осях 29 на ползуне 3.
Дифференциальные шкивы 6, 7, отклоняющие шкивы 12, 13, дифференциальные шкивы 19, 20 и отклоняющие шкивы 15, 16 создают четыре петли бесконечного зубчатого ремня 24.
Первая петля образуется параллельными ветвями 30 и 31 ремня 24, проходящего от дифференциального шкива 19 к дифференциальному шкиву 6, а затем к отклоняющему шкиву 15.
Вторая петля образуется параллельными ветвями 32 и 33 ремня 24, проходящего от отклоняющего шкива 15 к дифференциальному шкиву 7, а затем к дифференциальному шкиву 20.
Третья и четвертая петли образуются соответственно ветвями 34, 35 и 36, 37 зубчатого ремня 24, последовательно охватывающим шкивы 19, 12, 16, а затем 13 и 20.
Таким образом, каждая из ветвей 30, 31, 32, 33, 34, 35, 36, 37 ремня 24 взаимодействует с одним из дифференциальных шкивов 6, 7, либо одним из отклоняющих шкивов 12, 13, установленных в корпусе 1.
Работоспособность механизма обеспечивается за счет выбора передаточных отношений i1,1, i3,4 и диаметров дифференциальных шкивов 6 и 7, а также 19, 20 из соотношения

где D3, D4 - диаметры дифференциальных шкивов 19 и 20.
Устройство работает следующим образом. На вал 4 и жестко соединенные с ним дифференциальный шкив 6 и шкив 9 передается вращение с частотой ω1, которое периодически реверсируется. Шкив 6 приводит в движение ремень 24, а шкив 9 - ремень 8. Ремень 8 передает вращение на шкив 10, вал 5 и жестко связанный с ним шкив 7. Ремень 24 приводит во вращение дифференциальные шкивы 19, 20, отклоняющие шкивы 12, 13, 15, 16 и паразитные шкивы 25, 26, 27, 28, вращающиеся на осях 29.
Разница в окружных скоростях шкивов 6 и 7 и 19, 20 приводит к изменению размеров петель, образованных ветвями 30, 31, 32, 33, а также петель, образованных ветвями 34, 35, 36 и 37.
Отклоняющие шкивы 15, 16, вращаются на осях 14 и сообщают поступательное движение ползуну 3. Скорость движения ползуна 3 при этом может быть определена аналогично прототипу по формуле.

где ω1, ω2 - угловые скорости первого 6 и второго 7 дифференциальных шкивов.
Угловая скорость второго дифференциальных шкива 7 определяется передаточным отношением механической передачи вращения между валами 4,5

Угловые скорости третьего 19 и четвертого 20 дифференциальных шкивов и определятся уравнениями

Передаточное отношение механической передачи вращения, связывающей третий 19 и четвертый 20 дифференциальные шкивы, определяется уравнением

Подстановка уравнений (5) и (7) в выражение для передаточного отношения (8) позволяют получить соотношение (4), связывающее диаметры первого 6, второго 7, третьего 19 и четвертого 20 дифференциальных шкивов и передаточных отношений механических передач вращения i1,2 и i3,4.
В качестве примера реализации в описании представлена конструкция механизма с использованием зубчатого ремня. В этом случае соотношение (4) можно представить в виде

где z1, z2, z3, z4 - числа зубьев первого 6, второго 7, третьего 19 и четвертого 20 дифференциальных шкивов соответственно.
В приведенном на фиг. 1 и 2 примере указанные параметры имеют следующие значения.
z1 = z2 = 22; z3 = 32; z4 = 28;
zt1 = 24; zt2 = 30; zt3 = 32; zt4 = 44;
i1,2 = 30/24 = 1,25; i3,4 = 44/32 = 1,375.
Применение предлагаемого реверсивного механизма позволит повысить его жесткость за счет увеличения числа рабочих ветвей приводного ремня, а также повысить плавность перемещений за счет снижения колебаний ремня путем уменьшения длин ненагруженных ветвей ремня.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2014 |
|
RU2568004C2 |
| Бесступенчатый силовой привод | 1986 |
|
SU1499011A1 |
| ВЕДУЩИЙ ШКИВ ДЛЯ БЕССТУПЕНЧАТО-РЕГУЛИРУЕМОЙ ПЕРЕДАЧИ | 2002 |
|
RU2251639C1 |
| РЕМЕННАЯ ПЕРЕДАЧА | 1991 |
|
RU2019766C1 |
| УЗЕЛ ВЕНТИЛЯТОРА, СПОСОБ ЕГО РАБОТЫ И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2695240C2 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АВТОМАТИЧЕСКОЙ БЕССТУПЕНЧАТОЙ ПЕРЕДАЧЕЙ | 1999 |
|
RU2148504C1 |
| БЕССТУПЕНЧАТЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2221946C2 |
| ТРАНСМИССИЯ СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2566095C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2013 |
|
RU2549428C2 |
| ВЫПОЛНЕННАЯ В ВИДЕ РЕМЕННОЙ ПЕРЕДАЧИ СИСТЕМА ПРИВОДА САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2014 |
|
RU2661403C2 |
Изобретение относится к машиностроению. Реверсивный механизм содержит направляющие ползуна, ползун, первый и второй дифференциальные шкивы (ДШ), установленные в корпусе и соединенные между собой передачей вращения с реверсивным приводом, первый и второй отклоняющие шкивы, установленные на осях в корпусе оппозитно соответствующим ДШ, установленные на осях на ползуне два отклоняющих шкива, ремень, охватывающий отклоняющие и ДШ, расположенные таким образом, что ветви ремня, охватывающего дифференциальные и отклоняющие шкивы, параллельны между собой. Каждая ветвь ремня взаимодействует с одним из ДШ или отклоняющих шкивов, установленных в корпусе. Произведение отношения диаметров ДШ и передаточного отношения механической передачи вращения имеет значение, отличное от 1. Дополнительно на ползуне установлены третий и четвертый ДШ, взаимодействующие с ветвями ремня, связывающими соответственно первый дифференциальный и первый отклоняющий шкив, установленный в корпусе, а также второй дифференциальный и второй отклоняющий шкив, установленный в корпусе, при этом третий и четвертый ДШ связаны между собой механической передачей вращения. Обеспечивается повышение жесткости и точности позиционирования реверсивного механизма, а также повышение плавности перемещений. 2 ил.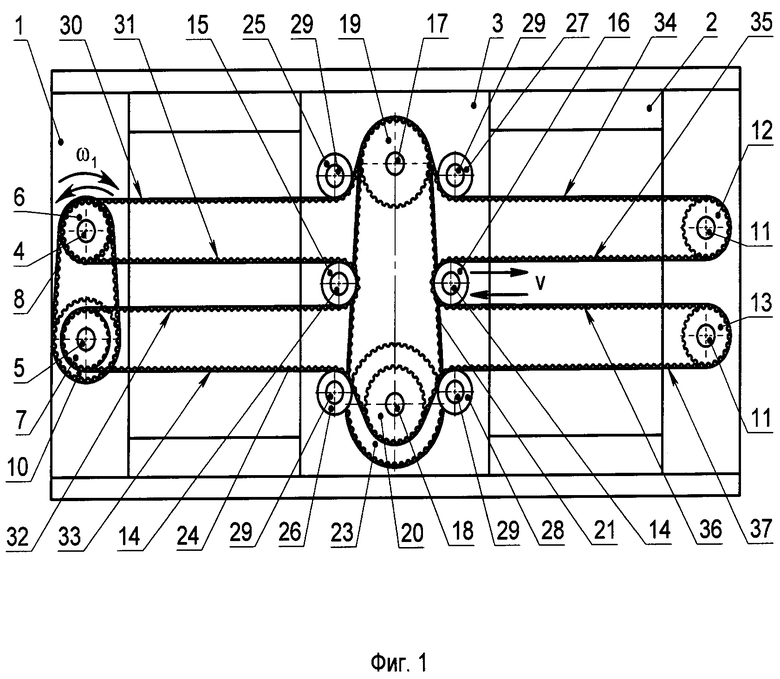
Реверсивный механизм для преобразования вращательного движения в поступательное, содержащий корпус, направляющие ползуна, ползун, первый и второй дифференциальные шкивы, установленные на валах в корпусе и соединенные между собой механической передачей вращения с реверсивным приводом, первый и второй отклоняющие шкивы, установленные на осях в корпусе оппозитно соответствующим дифференциальным шкивам, установленные на осях на ползуне два отклоняющих шкива, бесконечный ремень, охватывающий отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего дифференциальные и отклоняющие шкивы, параллельны между собой, при этом каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов или отклоняющих шкивов, установленных в корпусе, при этом произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1, отличающийся тем, что дополнительно на ползуне установлены третий и четвертый дифференциальные шкивы, взаимодействующие с ветвями ремня, связывающими соответственно первый дифференциальный и первый отклоняющий шкив, установленный в корпусе, а также второй дифференциальный и второй отклоняющий шкив, установленный в корпусе, при этом третий и четвертый дифференциальные шкивы связаны между собой механической передачей вращения с передаточным отношением
где D1, D2 - диаметры первого и второго дифференциальных шкивов; D3, D4 - диаметры третьего и четвертого дополнительных дифференциальных шкивов, установленных на ползуне и связанных с механической передачей вращения; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
| US 6134978 A1, 24.10.2000 | |||
| РЕВЕРСИВНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2014 |
|
RU2568004C2 |
| 0 |
|
SU161431A1 | |
| DE 4226292 A1, 11.02.1993. | |||

