Предлагаемое изобретение относится к машиностроению и может быть использовано в приводах возвратно-поступательно движущихся рабочих органов различных машин, в частности в приводах возвратно-поступательного перемещения столов плоскошлифовальных станков.
Известен реверсивный механизм привода стола электромеханического плоскошлифовального станка, содержащий основание в виде крестового стола, подвижный стол, установленный в линейных направляющих крестового стола, электрический привод вращения, механическую передачу понижения частоты вращения, зубчатый шкив, взаимодействующий с зубчатым ремнем, концы которого жестко закреплены на противоположных краях подвижного стола (US 4271637, кл. В24В 7/02, 1981 г., п. 3 формулы изобретения).
Данный реверсивный механизм позволяет увеличить диапазон регулирования скорости продольной подачи стола, что дает возможность расширения технологических возможностей за счет реализации на одном станке различных видов обработки шлифованием, различающихся скоростью продольной подачи: маятниковое шлифование, врезное глубинное шлифование, шлифование короткими ходами. Механизм нашел широкое применение в конструкциях электромеханических шлифовальных станков.
Недостатками данного реверсивного механизма является малая нагрузочная способность и жесткость ременной передачи, поскольку приводные силы передаются посредством одной нагруженной ветви ремня, необходимость использования дополнительной понижающей передачи в приводе вращения, а также достаточно высокая неравномерность хода стола станка, что снижает качество обработки.
Известен также реверсивный механизм стола плоскошлифовального станка, содержащий основание, прямолинейные направляющие, в которых установлен стол, зубчатый ремень, закрепленный концами на кронштейнах, жестко закрепленных на столе, при этом зубчатый ремень охватывает систему шкивов, состоящую из двух пар шкивов, расположенных на кронштейне стола, и двух пар шкивов, расположенных на неподвижном основании, образуя на них две большие и две малые петли, расположенные с противоположных сторон корпуса для закрепления ремня, а также приводной реверсивный электродвигатель вращательного движения, механическую передачу понижения частоты вращения, связанную со шкивом, расположенным на неподвижном основании (US 4485594, кл. В24В 49/00, 1984 г., пп. 4-7 формулы изобретения).
Данный механизм обладает высокой жесткостью, обусловленной использованием для привода четырех ветвей приводного ремня.
Его недостатками являются малое передаточное отношение, что делает необходимым использование дополнительных понижающих передач в приводе вращения и наличие ветви ремня большой протяженности.
Наиболее близким к заявляемому является реверсивный механизм для преобразования вращательного движения в поступательное, содержащий корпус, направляющие ползуна, ползун, паразитные шкивы, установленные на корпусе, два отклоняющих шкива, установленные на ползуне, два дифференциальных шкива, установленных в корпусе и соединенные механической передачей вращения с реверсивным приводом, бесконечный ремень, охватывающий паразитные, отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего отклоняющие шкивы, установленные на ползуне, параллельны между собой, при этом каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов, а произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1, причем механическая передача вращения может быть выполнена в виде зубчатой или ременной передачи, а ременная передача может быть выполнена в виде передачи зубчатым ремнем (ЕР 0161431, кл. F16H 19/06, 1985 г., пп. 1-7 формулы изобретения, прототип).
Паразитные шкивы, установленные на корпусе, служат для увеличения угла охвата дифференциальных шкивов, их число определяется формой петель, образованных приводным ремнем, и не имеет принципиального значения. Анализ кинематики прототипа позволяет сделать вывод, что скорость поступательного движения ползуна определяется разностью окружных скоростей дифференциальных шкивов
где ω1, ω2 - угловые скорости первого и второго дифференциальных шкивов; D1, D2 - диаметры первого и второго дифференциальных шкивов.
Рассмотрение данного выражения позволяет сделать вывод, что для обеспечения работоспособности механизма необходимо выполнение условия
Соотношение окружных скоростей дифференциальных шкивов определяется соотношением их диаметров и передаточным отношением механической передачи. Данное соотношение рассчитывается как произведение передаточного отношения механической передачи вращения на соотношение диаметров дифференциальных шкивов. Отличие данного соотношения от единицы является условием обеспечения работоспособности механизма по пп. 1-4 формулы изобретения прототипа
где i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
Данный механизм обеспечивает высокое передаточное отношение между приводом вращения и выходным звеном - ползуном, что исключает необходимость использования дополнительных понижающих передач вращения. При этом скорость перемещения ползуна определяется выражением
Недостатком указанного механизма является низкая жесткость, обусловленная использованием только двух рабочих ветвей приводного ремня.
Технической задачей предлагаемого изобретения является повышение жесткости реверсивного механизма за счет увеличения числа рабочих ветвей приводного ремня.
Поставленная задача достигается тем, что в реверсивном механизме для преобразования вращательного движения в поступательное, содержащем корпус, направляющие ползуна, ползун, установленные на осях в корпусе паразитные шкивы, два отклоняющих шкива, установленные на осях в ползуне, первый и второй дифференциальные шкивы, закрепленные на валах в корпусе и соединенные механической передачей вращения с реверсивным приводом, бесконечный ремень, охватывающий паразитные, отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего отклоняющие шкивы, установленные на ползуне, параллельны между собой, при этом каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов, а произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1, дополнительно на осях в корпусе и ползуне установлены по два отклоняющих шкива, охватывая которые, ремень образует две дополнительные петли с параллельными ветвями;
- два отклоняющих шкива, установленные на осях в корпусе, связаны с механической передачей вращения при обеспечении выполнения условия
где D1, D2 - диаметры первого и второго дифференциальных шкивов; Da1, Da2 - диаметры дополнительных шкивов, установленных на осях в корпусе и связанных с механической передачей вращения; i1,a1, i1,a2 - передаточное отношение механической передачи вращения, связывающей соответственно первый дифференциальный шкив и дополнительные шкивы; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы;
- отклоняющие шкивы установлены на противоположных концах равноплечих рычагов, шарнирно связанных с ползуном.
Новым в предложенном решении является то, что в известном реверсивном механизме для преобразования вращательного движения в поступательное дополнительно на осях в корпусе и ползуне установлены по два отклоняющих шкива, охватывая которые, ремень образует две дополнительные петли с параллельными ветвями;
- два отклоняющих шкива, установленные на осях корпусе, связаны с механической передачей вращения при обеспечении выполнения условия
где D1, D2 - диаметры первого и второго дифференциальных шкивов; Da1, Da2 - диаметры дополнительных шкивов, установленных на осях в корпусе и связанных с механической передачей вращения; i1,a1, i1,a2 - передаточное отношение механической передачи вращения, связывающей соответственно первый дифференциальный шкив и дополнительные шкивы; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы;
- отклоняющие шкивы установлены на противоположных концах равноплечих рычагов, шарнирно связанных с ползуном.
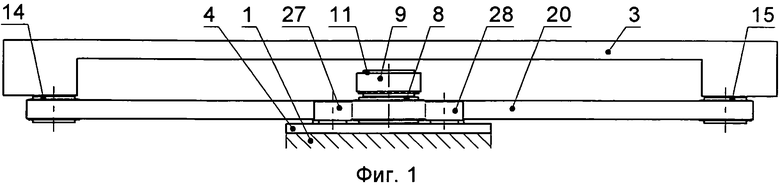
На фиг. 1 показана фронтальная проекция предлагаемого устройства по п. 1;
на фиг. 2 - вид сверху предлагаемого устройства по п. 1;
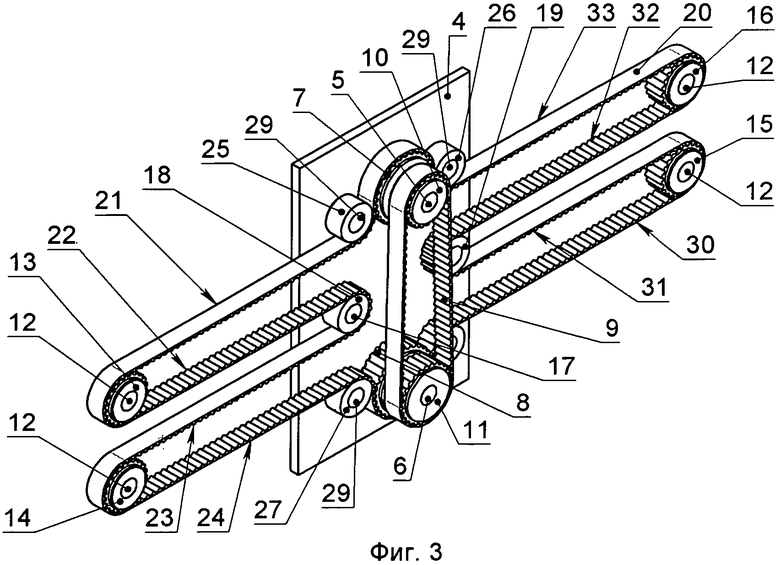
на фиг. 3 - изометрическая проекция, показывающая расположение приводных ремней и шкивов устройства по п. 1;
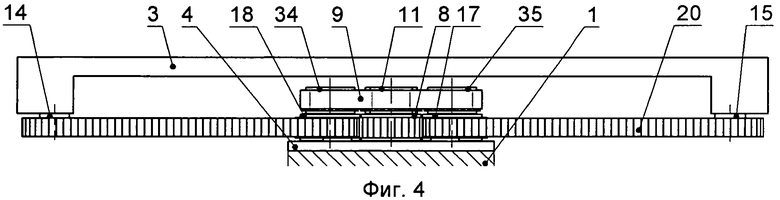
на фиг. 4 - фронтальная проекция предлагаемого устройства по п. 2;
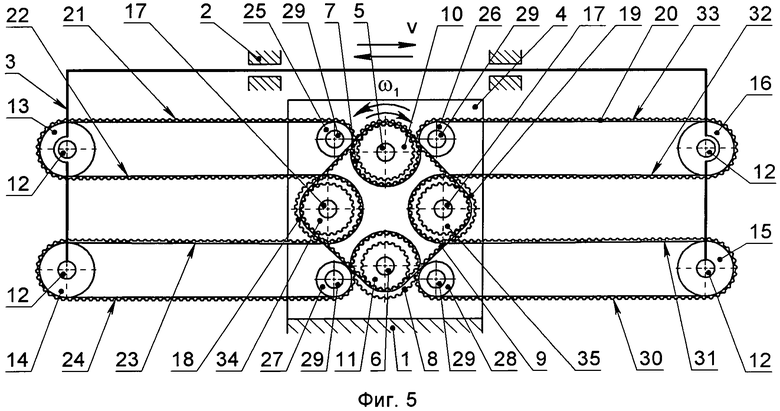
на фиг. 5 - вид сверху предлагаемого устройства по п. 2;
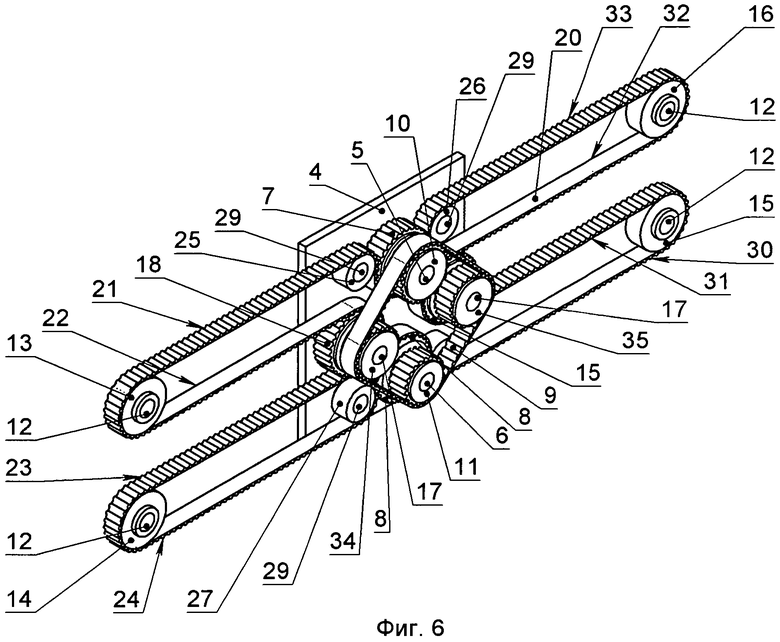
на фиг. 6 - изометрическая проекция, показывающая расположение приводных ремней и шкивов устройства по п. 2;
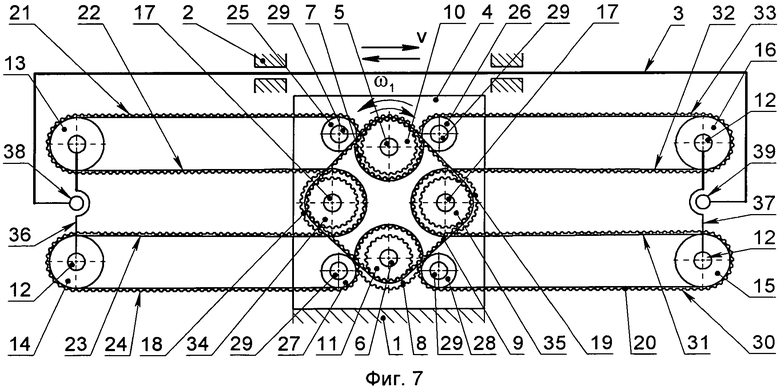
на фиг. 7 - вид сверху предлагаемого устройства по п. 3.
Предлагаемое устройство состоит из основания 1, прямолинейных направляющих 2 ползуна 3. На основании 1 закреплен корпус 4.
В корпусе 4 расположены валы 5 и 6 с дифференциальными шкивами 7 и 8. Валы 5 и 6 соединены механической передачей вращения с передаточным отношением i1,2. В данном примере реализации устройства механическая передача представляет собой передачу зубчатым ремнем 9, охватывающим шкивы 10, 11, жестко соединенные соответственно с валами 5 и 6.
На противоположных сторонах ползуна 3 на осях 12 установлены отклоняющие шкивы 13, 14, 15 и 16. На основании 1 установлены оси 17 отклоняющих шкивов 18 и 19. Бесконечный зубчатый ремень 20, охватывая отклоняющие шкивы 18, 19, отклоняющие шкивы 13-16 и дифференциальные шкивы 7, 8 образует четыре петли с параллельными ветвями.
Первая петля образуется параллельными ветвями 21 и 22 ремня 20, проходящего от дифференциального шкива 7 к отклоняющему шкиву 13, а затем к отклоняющему шкиву 18.
Вторая петля образуется параллельными ветвями 23 и 24 ремня 20, проходящего от отклоняющего шкива 18 к отклоняющему шкиву 14, а затем к дифференциальному шкиву 8.
Для увеличения угла охвата дифференциальных шкивов 7, 8 зубчатым ремнем 20 предназначены паразитные шкивы 25, 26 и 27, 28, установленные на осях 29 в корпусе 4.
Третья и четвертая петли образуются соответственно ветвями 30, 31 и 32, 33 зубчатого ремня 20, последовательно охватывающего дифференциальный шкив 8, отклоняющие шкивы 15, 19, 16 и дифференциальный шкив 7.
Работоспособность механизма обеспечивается за счет различных окружных скоростей вращения дифференциальных шкивов 7 и 8. Для этого необходимо, чтобы произведение соотношения диаметров дифференциальных шкивов 7 и 8 на передаточное отношение механической передачи вращения отличалось от единицы, что достигается при выполнении условия
где i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы и выполненной, например, в виде передачи зубчатым ремнем 9, охватывающим шкивы 10, 11.
При исполнении устройства по п. 2 (фиг. 4-6), отклоняющие шкивы 18 и 19 соединяются с механической передачей вращения при обеспечении выполнения условия

где D1, D2 - диаметры дифференциальных шкивов 7 и 8; Da1, Da2 - диаметры отклоняющих шкивов 18 и 19, связанных с механической передачей вращения; i1,a1, i1,a2 - передаточное отношение механической передачи вращения, связывающей соответственно первый дифференциальный шкив 7 и дополнительный шкив 18, а также шкивы 7 и 19; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
В приведенном примере реализации механическая передача выполнена в виде передачи зубчатым ремнем 9, охватывающим шкивы 10, 34, 11 и 35. Шкив 34 жестко соединен с отклоняющим шкивом 18, а шкив 35 с отклоняющим шкивом 19.
Данное исполнение механизма позволяет снизить неравномерность натяжения петель ремня 20, возникающую по причине потерь на трение в подшипниках отклоняющих шкивов 18, 19, а также отклоняющих шкивов 13, 14, 15, 16 и паразитных шкивов 25, 26, 27, 28.
Для снижения неравномерности натяжения петель ремня при колебании передаточного отношения механизма из-за наличия погрешностей изготовления дифференциальных шкивов 7, 8, шкивов 10, 11, 34 и 35 и зубьев ремней 9, 20 в исполнении устройства по п. 3, используются равноплечие рычаги 36, 37 (п. 3 формулы изобретения, фиг. 7). Рычаги 36 и 37 установлены на ползуне 3 в шарнирах 38 и 39 соответственно. При этом отклоняющие шкивы 13 и 14 установлены на противоположных концах рычага 36, а отклоняющие шкивы 15, 16 - на противоположных концах рычага 37.
Устройство работает следующим образом.
На вал 5 и жестко соединенные с ним дифференциальный шкив 7 и шкив 10 передается вращение с частотой ω1, которое периодически реверсируется. Шкив 7 приводит в движение ремень 20, а шкив 10 - ремень 9. Ремень 9 передает вращение на шкивы 11 и 8, жестко связанные между собой валом 6. Ремень 20 приводит во вращение шкивы 18, 19, отклоняющие шкивы 13, 14, 15, 16 и паразитные шкивы 25, 26, 27, 28.
Разница в окружных скоростях шкивов 7 и 8 вызывает изменение размеров петель, образованных ветвями 21, 22, 23, 24, а также петель, образованных ветвями 30, 31, 32 и 33.
Отклоняющие шкивы 13, 14, 15, 16, вращаются на осях 12 и сообщают поступательное движение ползуну 3. Скорость движения ползуна 3 при этом может быть определена по формуле
В исполнении механизма, позволяющем снизить влияние потерь на трение, на равномерность натяжения ветвей 21, 22, 23, 24 и 30, 31, 32, 33 ремня 20, ремень 9 передает вращение на дополнительные шкивы 34 и 35, попарно жестко связанные со шкивами 18 и 19, которые в этом случае выполняют функцию вспомогательных дифференциальных шкивов. В данном исполнении механизма важно выполнение условия (1), обеспечивающего попарное равенство петель 21, 22 и 23, 24, а также 30, 31 и 32, 33. Такое условие определяется равенством линейных скоростей осей 12 шкивов 13 и 14. Его вывод приведен ниже.
Для всех исполнений механизма (пп. 1-3 формулы) линейные скорости осей 12 шкивов 13 и 14 определятся уравнениями

Приравнивая скорости v1 и v2, получим уравнение, связывающее между собой угловые скорости шкивов 7, 8, 18 и 19

Запишем уравнения для передаточных отношений угловых скоростей шкивов 8 и 18 к угловой скорости ведущего шкива 7

Передаточное отношение i1,a1p представляет собой передаточное отношение передачи, образованной ветвями ремня 21, 22.
Подставив в уравнения (2) уравнения (3), получим следующее выражение, связывающее между собой диаметры шкивов 7, 8, 18, 19, и передаточные отношения между ними

При исполнении устройства по п. 2 формулы, в конструкцию добавляется передаточный механизм, связывающий между собой дифференциальный шкив 7 и отклоняющий шкив 18. В механизме по п. 2 передаточное отношение передачи, образованной ветвями ремня 21, 22 для обеспечения работоспособности, должно быть равно передаточному отношению механической передачи вращения

Подставив в (4) равенство (5), получим условие обеспечения работоспособности (1) механизма по п. 2 формулы изобретения.
Уравнения для ветвей ремня 30, 31, 32 и 33 получены на основе аналогичных рассуждений.
Для зубчатых шкивов уравнение (2) может быть преобразовано с использованием выражений, связывающих модуль, диаметр и числа зубьев шкивов

где m - модуль передачи, z1, za1, z2 - числа зубьев шкивов 7, 18 и 8 соответственно. Для передач зубчатым ремнем число зубьев шкива 18 может быть определено как

Для примера рассмотрим передачу со следующими параметрами: z1=22, z2=26, i12=1, i1,a1=1. Расчет по формуле (3) дает значение
При закреплении на ползуне 3 равноплечих рычагов 36 и 37 повышается равномерность распределения сил между нагруженными ветвями ремня 20. При работе механизма погрешности изготовления его деталей приводят к колебаниям длин петель, образованных ветвями 21, 22 и 23, 24, а также 30, 31 и 32, 33 зубчатого ремня 20. За счет поворота равноплечих рычагов 36 и 37 на некоторый угол происходит выравнивание сил натяжения указанных ветвей ремня 20.
Применение предлагаемого реверсивного механизма позволит повысить его жесткость за счет увеличения числа рабочих ветвей приводного ремня, а также снизить неравномерность хода за счет обеспечения значительного передаточного отношения между входным и выходным звеном.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2019 |
|
RU2722225C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2013 |
|
RU2549428C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428611C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523508C2 |
| ТРАНСМИССИЯ СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2566095C1 |
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| УСТРОЙСТВО для ПРОДОЛЬНОЙ ПОДАЧИ ТОНКОСТЕННЫХ ТРУБ | 1970 |
|
SU275681A1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 1991 |
|
RU2012833C1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| ПРИВОДНОЙ МЕХАНИЗМ | 2000 |
|
RU2158791C1 |
Изобретение относится к машиностроению, а более конкретно к приводам возвратно-поступательно движущихся рабочих органов различных машин, в частности плоскошлифовальных станков. Реверсивный механизм содержит корпус с направляющими ползуна, ползун, установленные на осях в корпусе паразитные шкивы, два отклоняющих шкива, установленные на осях в ползуне, первый и второй дифференциальные шкивы, закрепленные на валах в корпусе и соединенные механической передачей вращения с реверсивным приводом, бесконечный ремень, охватывающий паразитные, отклоняющие и дифференциальные шкивы. Кроме того, дополнительно на осях в корпусе и ползуне установлены по два отклоняющих шкива, охватывая которые, ремень образует дополнительные петли с параллельными ветвями. Достигается повышение жесткости реверсивного механизма. 3 з.п. ф-лы, 7 ил.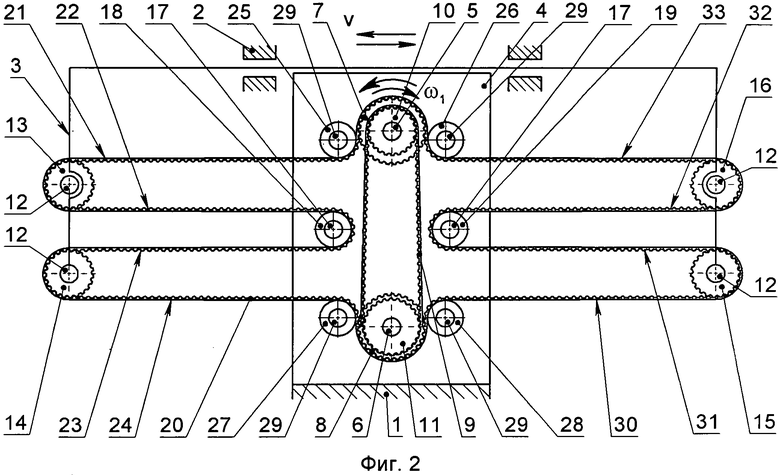
1. Реверсивный механизм для преобразования вращательного движения в поступательное, содержащий корпус, направляющие ползуна, ползун, установленные на осях в корпусе паразитные шкивы, два отклоняющих шкива, установленные на осях в ползуне, первый и второй дифференциальные шкивы, закрепленные на валах в корпусе и соединенные механической передачей вращения с реверсивным приводом, бесконечный ремень, охватывающий паразитные, отклоняющие и дифференциальные шкивы, расположенные таким образом, что ветви ремня, охватывающего отклоняющие шкивы, установленные на ползуне, параллельны между собой, при этом каждая ветвь ремня взаимодействует с одним из дифференциальных шкивов, а произведение отношения диаметров дифференциальных шкивов и передаточного отношения механической передачи вращения имеет значение, отличное от 1, отличающийся тем, что дополнительно на осях в корпусе и ползуне установлены по два отклоняющих шкива, охватывая которые, ремень образует дополнительные петли с параллельными ветвями.
2. Реверсивный механизм по п. 1, отличающийся тем, что два отклоняющих шкива, установленные на осях в корпусе, связаны с механической передачей вращения при обеспечении выполнения условия
где D1, D2 - диаметры первого и второго дифференциальных шкивов; Da1, Da2 - диаметры дополнительных отклоняющих шкивов, установленных на осях в корпусе и связанных с механической передачей вращения; i1,a1, i1,a2 - передаточное отношение механической передачи вращения, связывающей соответственно первый дифференциальный шкив и дополнительные шкивы; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
3. Реверсивный механизм по п. 2, отличающийся тем, что отклоняющие шкивы установлены на противоположных концах равноплечих рычагов, шарнирно связанных с ползуном,
где D1, D2 - диаметры первого и второго дифференциальных шкивов; Da1, Da2 - диаметры дополнительных шкивов, связанных с механической передачей вращения; i1,a1, i1,a2 - передаточное отношение механической передачи вращения, связывающей соответственно первый дифференциальный шкив и дополнительные шкивы; i1,2 - передаточное отношение механической передачи вращения, связывающей первый и второй дифференциальные шкивы.
4. Реверсивный механизм по п. 2, отличающийся тем, что отклоняющие шкивы установлены на противоположных концах равноплечих рычагов, шарнирно связанных с ползуном.
| 0 |
|
SU161431A1 | |
| Артоболевский, «Механизмы в современной технике», том 4, М., «Наука», 1975, с.430, мех | |||
| Телефонный коммутатор без переговорно-вызывных ключей | 1924 |
|
SU1283A1 |

