ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области медицинских устройств и, в частности, к хирургическим инструментам.
УРОВЕНЬ ТЕХНИКИ
Удаление ткани из тела пациента требуется в различных ситуациях, включая удаление ткани с целью лечения или диагностики. Например, в процедуре биопсии получают в достаточной степени небольшой гистологический препарат для переноса исследования из тела наружу. Обычно форма образца ткани или выемки, оставшаяся на участке удаленной ткани, имеет низкую важность, поскольку тело излечивает оставленную травму без очевидных следов. В другом примере лечение рака может охватывать удаление ткани. В данном случае важно удалить насколько возможно большое количество злокачественной ткани. Для обеспечения уверенности в том, что злокачественная ткань удалена, выполняют интерактивное исследование. В еще одном примере ткань удаляют для создания пути для дренажа избыточных жидкостей, например, в случае состояния при глаукоме. В последнем случае необходимы полный контроль формы и объема выемки, оставшейся в ткани тела пациента.
В WO2013186779 и WO2015145444, оба из которых принадлежат правоприобретателям настоящего изобретения и посредством ссылки полностью включены в настоящий документ, описаны различные варианты реализации режущих инструментов для управляемого создания канала в глазной стенке. Режущие инструменты непосредственно устанавливаются в блоке захвата многократного использования, который содержит ротор для вращения режущего инструмента вокруг его продольной оси после активации ротора.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению обеспечено новое полностью функциональное устройство для использования в процедурах управляемого удаления ткани. Устройство согласно настоящему изобретению особенно подходит для использования в лечении чувствительных органов тела пациента, таких как глаз, где точность хирургии является обязательным требованием. Кроме того, устройство может быть использовано для создания канала с регулируемым диаметром в глазной стенке для лечения глаукомы. Устройство является удобным в использовании как для врачей, так и для пациентов. Оно является безопасным в использовании и содержит тщательно продуманные средства для обеспечения безопасности. Кроме того, оно гарантирует стерильные условия при умеренных затратах.
Устройство содержит переносное одноразовое зондовое устройство, которое содержит режущий инструмент и отдельное вращающееся двигательное устройство (ротор), установленное на проксимальном конце одноразового зонда. Пользователь захватывает одноразовый переносной зонд, действующий в качестве захватного блока, а также режущий инструмент. Благодаря полному разделению между зондом и двигателем достигнуты определенные предпочтительные признаки. Во-первых, зонд может быть одноразовым, используемым только один раз устройством, которое таким образом, является стерильным и в то же время выполнено из недорогих, но износостойких материалов. Ротор может быть устройством многоразового использования, выполненным из износостойких материалов, предназначенных для длительной работы. Во-вторых, объем и вес каждого переносного зонда и ротора являются подконтрольными и, таким образом, обуславливают общий вес устройства, что является критичным фактором, когда речь идет о ручном управлении устройством при выполнении болезненных и точных хирургических процедур. Например, поскольку двигатель является наиболее тяжелой частью, уменьшение его веса/габаритов путем включения необходимого трансмиссионного узла в более легкий одноразовый зонд компенсирует моменты паразитных сил, действующих на целое устройство (зонд и двигатель), и облегчает работу врача при управлении устройством, минимизируя усталость. Если облегченный одноразовый зонд является удлиненным, двигатель опирается на участок руки между большим и указательным пальцами, в результате чего улучшаются удобство и управляемость устройством как для пользователя-правши, так и для пользователя–левши.
Соединение одноразового зонда с ротором может быть реверсивным (имеющим две противоположных ориентации), или между зондом и ротором могут иметь место множество шарнирных ориентаций. Такой подход позволяет экономить силы и время при соединении ротора с одноразовой частью с одновременным обеспечением полной функциональности устройства.
Переносной зонд может быть оптимизирован для взаимодействия с наружной анатомией (поверхностью лечения) органа тела пациента, например глаза; конструкция зонда имеет на верхнем (дистальном) конце в достаточной степени короткую головку с предпочтительным углом наклона относительно более длинной ручки, используемой для удерживания зонда. Такая конструкция обеспечивает возможность удобного доступа к каждой точке в органе тела пациента снаружи. Короткая головка выполнена путем размещения ротора на заднем (проксимальном) конце переносного устройства и расположением подходящего трансмиссионного узла, проходящего от ротора через удлиненную ручку к режущему инструменту, расположенному на верхнем конце.
Устройство содержит множество простых в использовании элементов, максимизирующих его эффективность и эргономику. Переносной зонд может использоваться одинаковым образом как пользователями–левшами, так и пользователями–правшами. Устройство содержит опору для указательного пальца, обеспечивающую улучшенные захват и управление ориентацией режущего инструмента. Как указано выше, ротор, размещенный на заднем конце удлиненной рукоятки таким образом, что задний конец рукоятки или ротора, или переходной части между ними расположен между большим пальцем хирурга и его указательным пальцем (на первой дорсальной межкостной мышце), функционирует в качестве балансирующего средства (благодаря относительно большому весу ротора) и, следовательно, позволяет хирургу обеспечить более точный контроль при трехмерной ориентации устройства.
Трансмиссионный узел, который проходит через переносной зонд от ротора к режущему инструменту, выполнен из одноразового пластика или другого дешевого и износостойкого материала (материалов). Трансмиссионный узел содержит по меньшей мере две последовательно расположенных/связанных части, в частности, по меньшей мере входную часть и выходную часть. Выходная часть установлена внутри корпуса переносного зонда таким образом, что обеспечен осевой зазор. Трансмиссионный узел выполнен таким образом, что во время работы он выталкивает режущий инструмент к наружной стороне устройства, т.е. вперед в направлении к органу, подвергнутым лечению, обеспечивая таким образом улучшенное взаимодействие с органом, подвергнутым лечению.
В устройстве применены меры высшей категории по обеспечению безопасности как в механическом аспекте, так и в аспекте управления. Во–первых, устройство содержит крышку, которая закрывает режущий инструмент до его использования. Крышка не открывается случайным образом, если ее не открывают намеренно. Она не открывается полностью, если не проходит определенное пороговое расстояние. Крышка открывается вдоль пути, который не совпадает с режущим инструментом. Она может быть удалена только тогда, когда находится в полностью открытом положении, и путем ее оттягивания в направлении, не совпадающем с осью режущего инструмента и его острым кончиком. Во–вторых, активация режущего инструмента управляется и отслеживается выделенным специально запрограммированным управляющим блоком. Управляющий блок позволяет использовать заданные выбранные значения различных параметров активации, подходящих для конкретной хирургической процедуры. В одном примере один фиксированный импульс генерируется в ответ на действие активации; т.е. выходной сигнал не является прямым и непрерывным, что означает, что никакой дополнительный выходной сигнал не генерируется в ответ на дополнительные попытки активации в течение заданного периода времени.
В качестве гибкого решения изобретение потенциально может быть использовано в медицинском оборудовании, которое уже присутствует в операционной. Например, медицинское оборудование, обеспеченное соединительным средством, с которым могут быть соединены переносной зонд и двигательные устройства, которое может иметь выполненный с возможностью расширения управляющий блок, может использоваться с настоящим изобретением. Таким образом, хирург имеет возможность выполнять соответствующее лечение с использованием того же оборудования, экономя время лечения и рабочее пространство в помещении.
Таким образом, согласно первому широкому аспекту настоящего изобретения обеспечено устройство для использования при удалении ткани из органа тела пациента, содержащее переносное зондовое устройство, вращающееся двигательное устройство и соединительный узел, выполненный с возможностью соединения разъединяемым способом указанного переносного зондового устройства с указанным вращающимся двигательным устройством;
указанное переносное зондовое устройство является одноразовым и содержит: корпус, имеющий проксимальный и дистальный концы; выполненный с возможностью вращения режущий инструмент, проходящий в дистальном направлении от указанного дистального конца корпуса и выполненный с возможностью резания и удаления ткани во время вращения; и трансмиссионный узел, проходящий в указанном корпусе между указанными проксимальным и дистальным концами и выполненный с возможностью передачи крутящего момента указанному выполненному с возможностью вращения режущему инструменту;
указанный соединительный узел расположен между проксимальным концом указанного переносного зондового устройства и дистальной стороной указанного вращающегося двигательного устройства и выполнен с возможностью обеспечения взаимодействия между указанным вращающимся двигательным устройством и указанным трансмиссионным узлом для обеспечения таким образом управляемого вращения режущего инструмента и удаления ткани.
Согласно некоторым вариантам реализации устройство также содержит управляющий блок, выполненный с возможностью соединения с указанным вращающимся двигательным устройством, а также, будучи соединенным с указанным вращающимся двигательным устройством, с возможностью активации вращающегося двигательного устройства в механизме управляемой активации.
Согласно некоторым вариантам реализации соединительный узел выполнен с возможностью обеспечения соединения указанного вращающегося двигательного устройства с указанным переносным зондовым устройством по меньшей мере в двух относительных ориентациях. Согласно еще одним некоторым вариантам реализации соединительный узел содержит реверсивный соединитель.
Согласно некоторым вариантам реализации указанный корпус содержит удлиненную часть и головочную часть, размещенные последовательно от указанного проксимального конца до указанного дистального конца корпуса. Указанная удлиненная часть и головочная часть образованы как единое целое. Указанная головочная часть ориентирована под заданным углом относительно удлиненной части, причем указанный заданный угол выбирается в соответствии с ориентацией поверхности лечения органа тела пациента. Указанная удлиненная часть имеет заданную длину, выбранную с возможностью обеспечения устойчивого положения удерживания устройства во время работы. Указанное устойчивое положение удерживания таково, что указанное вращающееся двигательное устройство опирается на первую дорсальную межкостную мышцу пользователя, удерживающего устройство.
Согласно некоторым вариантам реализации указанный переносной зонд содержит удерживающую часть, позволяющую пользователю управлять пространственной ориентацией выполненного с возможностью вращения режущего инструмента. Указанная удерживающая часть содержит выемку, в которой пользователь размещает свой указательный палец, для управления таким образом пространственной ориентацией выполненного с возможностью вращения режущего инструмента. В дополнение к данному или согласно еще одному варианту реализации указанная удерживающая часть выполнена с обеспечением возможности управления устройством как пользователями–левшами, так и пользователями–правшами.
Согласно некоторым вариантам реализации указанный трансмиссионный узел прикладывает как вращательное усилие, так и усилие подачи к режущему инструменту, таким образом улучшая взаимодействие режущего инструмента с органом тела пациента во время работы.
Согласно некоторым вариантам реализации указанный корпус содержит сменную крышку, выполненную с возможностью безопасного закрывания режущего инструмента, когда он не используется. Указанная крышка выполнена с возможностью перемещения по заданному пространственному пути между закрытым положением, в котором закрыт указанный режущий инструмент, и открытым положением, в котором открыт указанный режущий инструмент, причем крышка в это время остается соединенной с корпусом. Указанный переносной зонд содержит безопасный открывающий механизм, выполненный с возможностью возвращения указанной крышки в ее закрытое положение, если крышка не проходит заданное расстояние вдоль указанного пространственного пути. В дополнение к данному или согласно еще одному варианту реализации указанный переносной зонд содержит безопасный фиксирующий механизм, выполненный с возможностью удерживания указанной крышки в указанном закрытом положении, если пользователь не толкает ее вдоль указанного пространственного пути. Указанная крышка является отделяемой от указанного корпуса только в ее открытом положении. Указанное открытое положение указанной крышки обеспечивает возможность удаления крышки ее оттягиванием в направлении, не совпадающем с продольной осью режущего инструмента.
Согласно некоторым вариантам реализации указанный управляющий блок содержит сенсорный экран.
Согласно некоторым вариантам реализации указанный управляющий блок предварительно запрограммирован с возможностью активации указанного вращающегося двигателя при генерации одиночного фиксированного сигнала активации с известной скоростью вращения и длительностью в течение заданного временного интервала.
Согласно некоторым вариантам реализации устройство также содержит педаль для активации заданных функций активации для управляемого вращения указанного режущего инструмента.
Согласно некоторым вариантам реализации указанным органом тела пациента является глаз, и указанный режущий инструмент выполнен с возможностью создания канала в склере глаза.
Согласно еще одному широкому аспекту изобретения обеспечен управляющий блок для управления работой устройства при удалении ткани, предназначенный для удаления ткани из органа тела пациента, содержащий механизм активации для активации режущего инструмента устройства для удаления ткани, и контроллер, выполненный с возможностью управления указанным механизмом активации, для генерирования одиночного фиксированного сигнала активации известной интенсивности и длительности в течение заданного временного интервала, таким образом ограничивающего работу режущего инструмента в течение указанного временного интервала, определенного только указанным одиночным сигналом активации.
Согласно еще одному широкому аспекту изобретения обеспечено переносное зондовое устройство, содержащее выполненный с возможностью вращения режущий инструмент и выполненное с возможностью соединения указанного режущего инструмента с наружным вращающимся двигательным устройством, в результате чего указанное зондовое устройство с режущим инструментом является одноразовым; указанное переносное зондовое устройство содержит: полый корпус, имеющий проксимальный и дистальный концы и содержащий удлиненную часть и головочную часть, расположенные с заданным углом между ними последовательно от указанного проксимального конца до указанного дистального конца; и трансмиссионный узел, проходящий в указанном корпусе и соединенный в одном конце с указанным режущим инструментом и в другом конце с соединительным узлом, связанным с указанным вращающимся двигательным устройством для управляемой таким образом передачи мощности от вращающегося двигательного устройства режущему инструменту.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для улучшенного понимания объекта настоящего изобретения, который описан в настоящей заявке, и иллюстрации способа его практического осуществления ниже подробно описаны варианты его реализации исключительно в качестве неограничивающего примера со ссылкой на сопроводительные чертежи, на которых:
На ФИГ. 1A–1D показан неограничивающий пример устройства согласно настоящему изобретению;
На ФИГ. 2A–2E показан неограничивающий пример соединительного узла для соединения переносного зонда и вращающегося двигателя согласно настоящему изобретению;
На ФИГ. 3A–3F показана безопасная крышка и различные защитные механизмы, содержащиеся в переносном зонде, согласно настоящему изобретению;
На ФИГ. 4A–4B показаны различные функциональные средства, содержащиеся в переносном зонде согласно настоящему изобретению; и
На ФИГ. 5 показаны различные компоненты управляющего блока согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
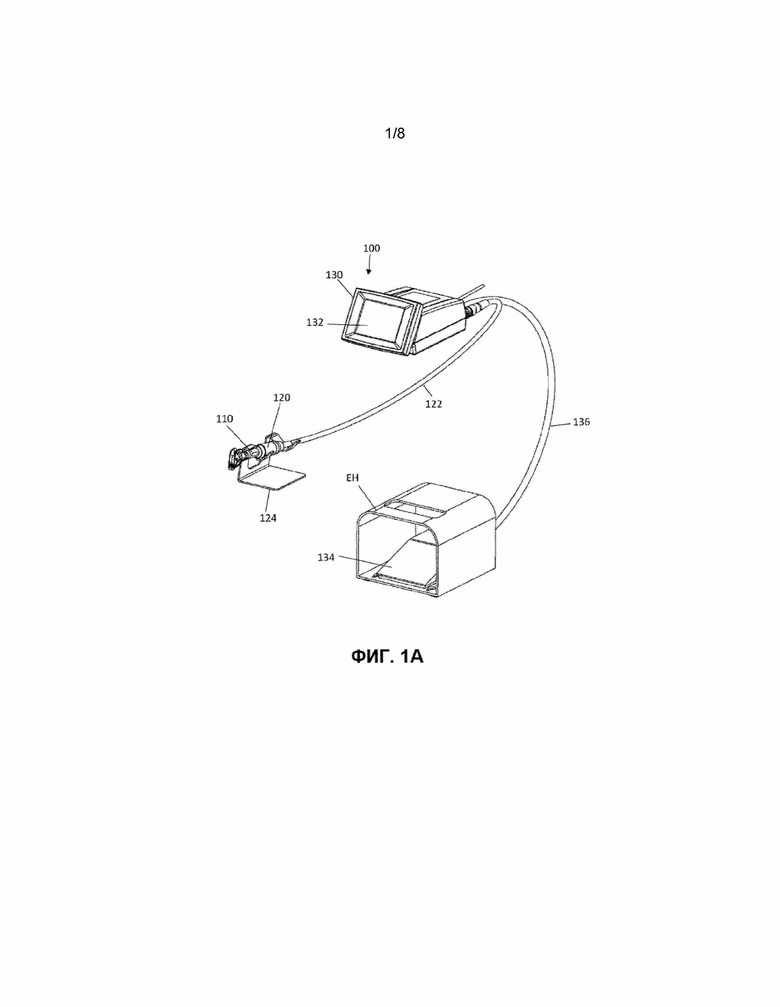
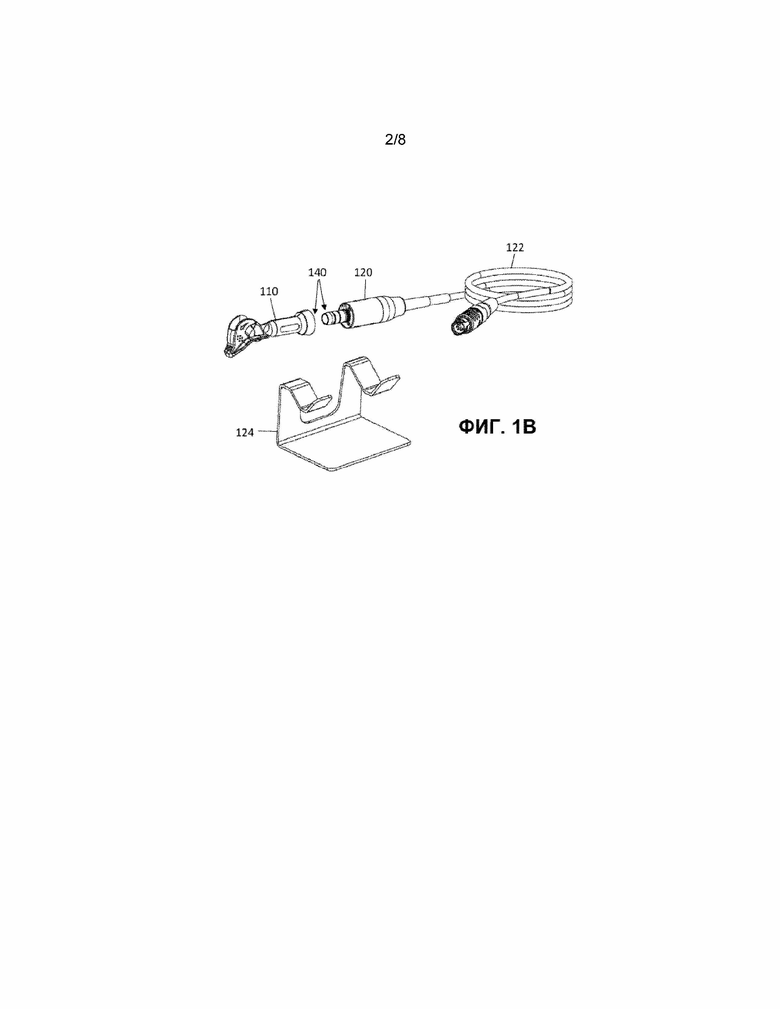
На фиг. 1A–1D показан неограничивающий пример медицинского устройства 100, выполненного согласно настоящему изобретению. Медицинское устройство 100 выполнено с возможностью использования в процедурах, включающих удаление ткани из органа тела пациента, например, удаление ткани из глаза, например, для создания канала в ткани склеры глаза для обеспечения возможности дренажа избыточной текучей среды, накапливающейся в глазу, которая является симптомом, который вызывает различные медицинские заболевания и/или осложнения. Как показано на ФИГ. 1A, устройство 100 содержит переносное зондовое устройство 110, которое содержит выполненный с возможностью вращения режущий/хирургический инструмент, который режет и удаляет ткань, и вращающееся двигательное устройство 120, которое вызывает вращательное перемещение режущего инструмента для удаления ткани. Переносной зонд и вращающееся двигательное устройство, размещенные в отдельных корпусах, соединены друг с другом соединительным узлом 140, как показано на ФИГ. 1B и также подробно описано ниже со ссылкой на ФИГ. 2A–2E. Устройство 100 также может содержать, как показано на чертеже, управляющий блок 130, который управляет работой вращающегося двигательного устройства и режущего инструмента. На чертеже также показаны дополнительная подставка 124, выполненная с возможностью безопасного поддерживания переносного зондового устройства, если оно не используется, и дополнительная педаль 134, посредством которой пользователь может активировать управляющий блок и/или вращающийся двигатель.
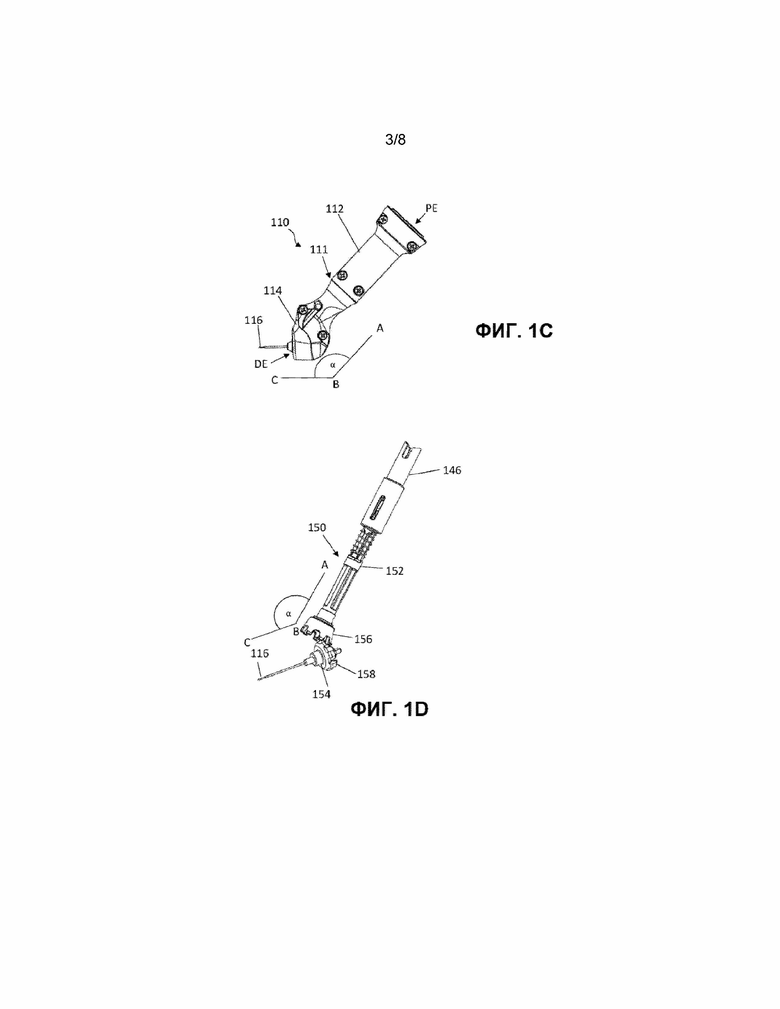
Как показано на ФИГ. 1C, переносной зонд 110 содержит расположенный снаружи корпус 111, проходящий между проксимальным концом PE и дистальным концом DE, и выполненный с возможностью вращения режущий инструмент 116, проходящий в дистальном направлении от дистального конца корпуса. В настоящей заявке термин "дистальный" обозначает сторону пациента, в то время как термин "проксимальный" обозначает сторону оператора/врача. Вращающийся режущий инструмент 116 выполнен с возможностью резания и удаления ткани во время вращения. Режущий инструмент 116 может быть выполнен как описано в WO2013186779 под названием "Медицинское устройство, узел и способ создания канала в мягкой ткани" и WO2015145444 под названием "Медицинское устройство для удаления ткани", которые оба принадлежат правоприобретателям настоящего изобретения и посредством ссылки полностью включены в настоящий документ. Внутри корпуса переносного зонда расположен трансмиссионный узел, выполненный с возможностью передачи крутящего момента от вращающегося двигательного устройства 120 режущему инструменту 116 для приведения во вращение таким образом режущего инструмента 116. Пример трансмиссионного узла описан в настоящей заявке ниже со ссылкой на ФИГ. 1D.
Корпус переносного зондового устройства может быть выполнен за одно целое и может иметь цельную конструкцию, или он может быть выполнен более чем из одной части, например из двух частей. В любом случае корпус может иметь более чем одну продольную ось, проходящую вдоль его длины между проксимальным и дистальным концами. Возможность иметь множество продольных осей может быть полезна в том отношении, что она улучшает гибкость и облегчает доступ вращающегося режущего инструмента к органу, подвергнутому лечению, в трехмерном пространстве. Наклоном корпуса по меньшей мере в одной точке вдоль его длины или включением двух или более последовательных частей, имеющих наклон под заданными углами относительно друг друга, можно управлять ориентацией зонда, а также режущего инструмента в трехмерном пространстве относительно поверхности лечения, являющейся поверхностью органа, к которой обращен режущий инструмент. В описанном примере, как показано на ФИГ. 1C, корпус содержит удлиненную часть 112, расположенную с проксимальной стороны (т.е. со стороны пользователя, дальше от пациента), и расположенную с дистальной стороны (со стороны пациента, дальше от пользователя) головочную часть 114, в которой установлен выполненный с возможностью вращения режущий инструмент 116. Как показано на чертеже, головка 114 ориентирована под заданным углом α относительно удлиненной части 112. Заданный угол α может быть обеспечен различными способами. Согласно одному варианту реализации, показанному на чертеже, этот угол определен как угол между продольными осями удлиненной части 112 и режущего инструмента 116, причем стороны AB и BC угла параллельны продольной оси удлиненной части и продольной оси режущего инструмента соответственно. Заданный угол α выбирается на основании конкретного случая медицинского применения для обеспечения эффективного и удобного доступа к удаляемому участку ткани, иными словами, он выбирается с возможностью обеспечения наилучшей или оптимальной эргономики для удерживания устройства относительно участка ткани, подвергнутого лечению. Следовательно, заданный угол выбирается для обеспечения доступа режущего инструмента 116 к каждой точке на органе тела пациента с учетом кривизны органа/поверхности лечения, когда пользователь удерживает зонд 110 своей рукой. Заданный угол α определяется на основании множества факторов, включая помимо прочего: абсолютные длины удлиненной части и головки или относительное расстояние между ними; длину режущего инструмента; анатомию органа, подвергнутого лечению, и окружающих органов. Значение угла α обычно равно 90° или больше до максимального значения 180°. В случае лечения глаза угол α выбирают близким или равным углу 135°.
Устройство согласно настоящему изобретению способствует повышению безопасности пациента и минимизирует риск любой инфекции. Согласно предпочтительным вариантам реализации весь переносной зонд 110 является одноразовым, так что он используется один раз и для одного пациента в данный момент времени. Также, весь зонд 110 выполнен из материалов, которые обеспечивают его утилизацию, таких как различные полимеры медицинского назначения, например биологически совместимые полимеры, за исключением режущего инструмента, выполненного из биологически совместимого металла, керамики или тому подобного материала. В то же время, поскольку зонд используется в течение короткого времени, он может быть выполнен из недорогих и вместе с тем износостойких материалов. Например, корпус зонда может быть выполнен из поликарбоната (пластиковые части), и хирургический инструмент может быть выполнен из коррозионно-стойкой стали (CRES) 420F.
На ФИГ. 1D показан неограничивающий пример трансмиссионного узла 150, выполненного согласно настоящему изобретению. Трансмиссионный узел, который размещен в корпусе 111, например удлиненной части 112 и головочной части 114, выполнен из легких материалов одноразового использования и в то же время износостойких материалов, таких как полимеры. Трансмиссионный узел выполнен и выбран с возможностью выдерживания скорости вращения, составляющей десятки тысяч оборотов в минуту. В конкретных ситуациях, например, при удалении мягкой ткани, такой как склера глаза, скорость выбирают равной приблизительно 8000 об/мин, которая является достаточной, но не чрезмерной. Кроме того, трансмиссионный узел обеспечивает эффективную передачу крутящего момента и содержит минимальное количество отдельных элементов для достижения этого. В описанном примере трансмиссионный узел 150 содержит три элемента: зажимное устройство 146; входной вал 152, соединенный с зажимным устройством; и выходной вал 154, соединенный с входным валом. Дистальная часть входного вала 152 содержит входной редуктор 156, который связан с выходным редуктором 158, выполненным в проксимальной части выходного вала. Трансмиссионный узел прикладывает как вращательное усилие, так и усилие подачи к режущему инструменту 116, таким образом улучшая взаимодействие головочной части и режущего инструмента с органом тела пациента во время лечения. Согласно одному показанному на чертеже варианту реализации выходной вал 154 имеет определенный осевой зазор, и профиль редуктора создает вектор силы, направленный вперед в дистальном направлении. После присоединения двигательного устройства к зондовому устройству зажимное устройство и входной вал прочно скреплены в единый жесткий элемент и вращаются вместе как цельная часть во время вращательного перемещения.
Вращающийся двигатель 120 соединен своей дистальной стороной с проксимальным концом (концом PE на ФИГ. 1C) зонда 110 посредством соединительного узла 140, который расположен на проксимальном конце зонда и дистальном конце вращающегося двигателя, для способствования таким образом вращению режущего инструмента 116 посредством трансмиссионного узла, проходящего в корпусе зонда. Вращающийся двигатель может содержать встроенный датчик, такой как магнитный или оптический датчик угла поворота, или датчик угла поворота другого типа. В случае магнитного датчика угла поворота конструкция может быть такой, что датчик угла поворота имеет магнит с множеством полярностей, соединенный с ротором двигателя. Считывание изменения полярностей магнита выполняется выделенными датчиками, например, датчиками Холла, которые являются неподвижными и собраны в корпусе вращающегося двигателя. Датчик может обнаруживать частоту вращения двигателя, направление вращения и количество оборотов. Двигатель может быть двигателем щеточного типа или двигателем бесщеточного типа, или двигателем любого другого подходящего типа.
Управляющий блок 130 управляет работой двигателя 120 посредством соединителя 122, который в показанном примере является проводным соединителем. Согласно некоторым вариантам реализации соединитель может быть беспроводным. Как подробно описано ниже, управляющий блок 130 активирует двигатель 120 и вызывает вращение режущего инструмента 116 в ответ на выбор функции, выполненный пользователем посредством пульта 132 управления на управляющем блоке 130. Согласно некоторым вариантам реализации, как также описано ниже, пульт управления 132 содержит сенсорный экран для выбора функций активации и/или параметров.
Согласно некоторым вариантам реализации, таким как показанный на чертеже, устройство 100 также содержит педаль 134, которую пользователь нажимает своей ногой для активации вращающегося двигателя на основании функции, ранее выбранной на управляющем блоке 130. Схожим образом, педаль соединена с управляющим блоком посредством соединителя 136, который в этом примере является проводным соединителем, однако также может быть использован беспроводной соединитель. Педаль может быть расположена в вмещающем корпусе EH, который минимизирует риск случайного нажатия ногой. Пользователь может нажать педаль только тогда, когда он вставляет свою ногу во вмещающий корпус. В результате предотвращено неумышленное нажатие и активация вращающегося режущего инструмента. Кроме того, вмещающий корпус также действует в качестве направляющего средства для оператора. Когда оператор сосредотачивает внимание на пациенте и микроскопе, он может найти корпус педали и ввести свою ногу непосредственно внутрь без посторонней помощи.
Устройство согласно настоящему изобретению обеспечивает независимое и полностью функциональное использование только одним врачом. Использование педали улучшает функциональность устройства путем обеспечения возможности для врача независимо использовать устройство, удерживая зонд в одной руке и оставляя свободной другую руку, которую врач может использовать для поддержки пациента или удерживания другой вспомогательной части/устройства, необходимой для процесса лечения.
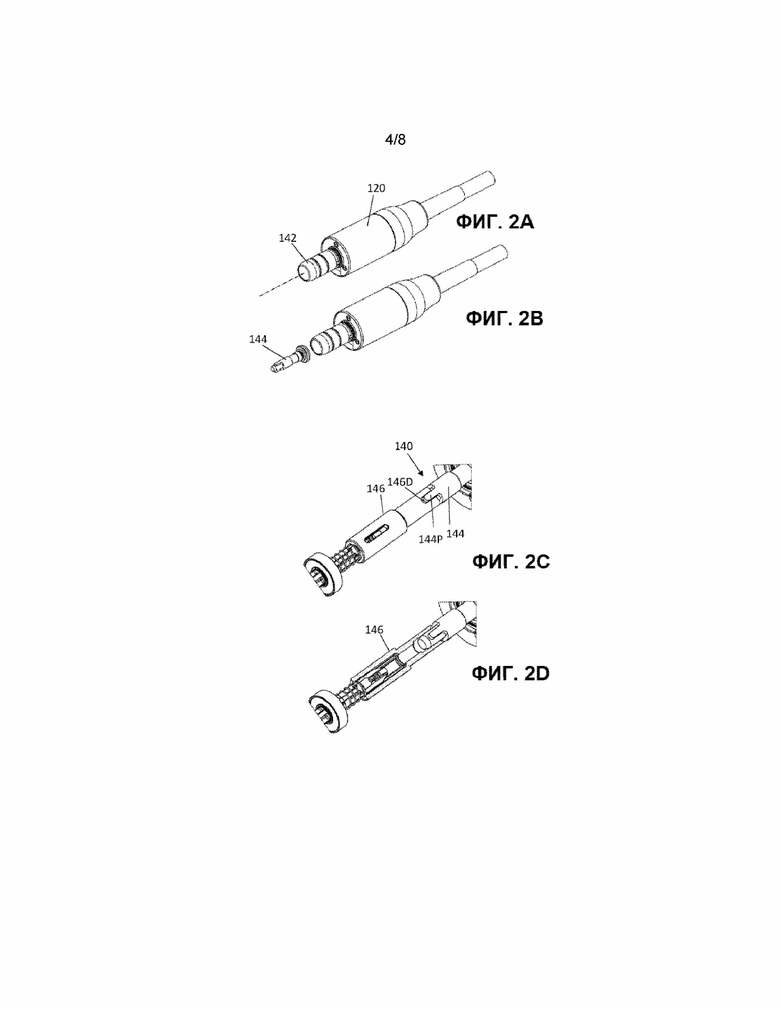
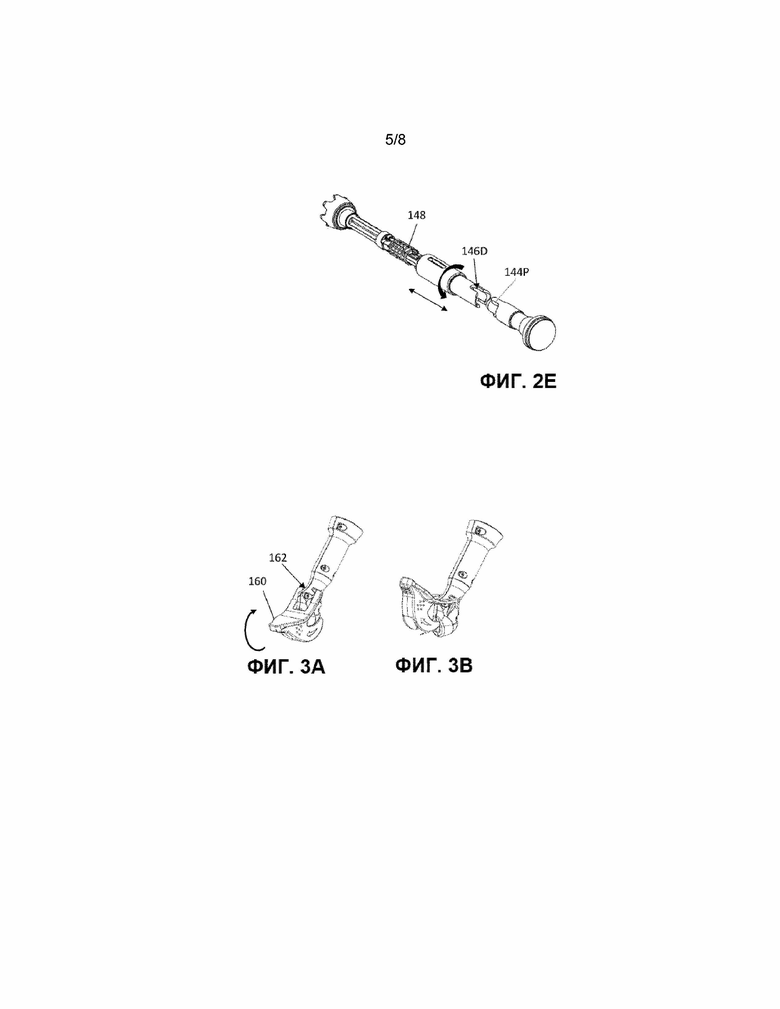
На ФИГ. 2A–2E показан неограничивающий пример соединительного узла 140 согласно настоящему изобретению. Согласно настоящему изобретению соединительный узел обеспечивает возможность соединения вращающегося двигателя 120 с зондом 110 по меньшей мере в двух ориентациях относительно друг друга. Соединительный узел обычно расположен между переносным зондом на его проксимальном конце и вращающимся двигателем в его дистальной стороне. В описанном примере соединительный узел 140 обеспечивает реверсивное соединение между двигателем и зондом, т.е. он обеспечивает возможность соединения обоих устройств в двух противоположных (повернутых на 180°) ориентациях. Как показано на ФИГ. 2A и 2B, двигатель 120 имеет расположенный на его дистальной стороне, т.е. стороне, соединенной с зондом, один из двух элементов соединительного узла, в котором полый стержень 142 проходит в дистальном направлении, в который установлен выполненный с возможностью вращения вал 144. Покомпонентное изображение этого узла показано на ФИГ. 2B. Выполненный с возможностью вращения вал 144 соединен своим проксимальным концом с вращающимся двигателем 120 для передачи вращения далее к режущему инструменту 116. Зонд 110 содержит на своем проксимальном конце зажимное устройство 146, образующее второй элемент соединительного узла 140. Как показано на ФИГ. 2C, зажимное устройство 146 и выполненный с возможностью вращения вал 144 взаимодействуют друг с другом в сцепляющем механизме типа "штырь–гнездо" таким образом, что два выступа 144P на валу 144 взаимодействуют с двумя соответствующими углублениями 146D, выполненными на проксимальном конце зажимного устройства 146. Взаимодействие между указанными выступами и углублениями также показано на ФИГ. 2D, на котором показано в продольном разрезе зажимное устройство 146.
Как показано на чертеже, эти два выступа 144P, а также эти два углубления 146D идентичны друг другу и выполнены с диаметральной симметрией относительно друг друга 180°. В результате соединитель является реверсивным, а зонд и двигатель выполнены с возможностью соединения друг с другом, даже если их повернуть на 180° относительно друг друга при соединении. Следует отметить, что количество выступов и соответствующих углублений может быть больше чем два, и в таком случае выступы и соответствующие углубления могут быть равномерно распределены относительно друг друга вдоль периметра основания зажимного устройства 146 и вала 144.
Согласно одному аспекту соединительный узел обеспечивает не требующую усилий и беспрепятственную связь между зондом и двигателем таким образом, что для пользователя не требуется поворачивать или выравнивать их или следить за концевыми сторонами зонда и двигателя при их соединении. Согласно некоторым вариантам реализации соединение соединительного узла включает осевое или вращательное перемещение одного из двух взаимодействующих элементов относительно другого элемента. В описанном примере, показанном на ФИГ. 2E, зажимное устройство 146 выполнено с возможностью свободного перемещения относительно зонда 110 в осевом направлении и азимутально. Это облегчает процесс скрепления и делает его беспрепятственным и не требующим надзора, поскольку даже если выступы и углубления не совмещены при соединении зонда и двигателя, когда пользователь толкает выполненный с возможностью вращения вал к зажимному устройству в дистальном направлении, пружина 148 толкает зажимное устройство в противоположном проксимальном направлении, в результате чего зажимное устройство принуждено к вращению до выравнивания выступов с углублениями и достижения зацепления. Взаимодействие между двигательным устройством и переносным зондовым устройством охватывает их внутренние вращающиеся части, т.е. выполненный с возможностью вращения вал 144 на стороне двигателя и входной вал 152 на стороне одноразового зонда, которые начинают перемещаться вместе или в соотношении 1:1 передачи, или в другом заданном соотношении. Последний случай является особенно подходящим для использования в случае, если двигатель предназначен для работы с постоянной скоростью с одновременным обеспечением различных скоростей на выходе для трансмиссионного узла и режущего инструмента. Несмотря на то, что внутренние вращающиеся части взаимодействуют как описано выше, наружные корпуса двигательного устройства и переносного одноразового устройства не обязательно должны взаимодействовать. Согласно одному конкретному варианту реализации они свободно вращаются относительно друг друга. Эта особенность улучшает управляемость зонда пользователем, поскольку она предотвращает или по меньшей мере минимизирует противодействующие моменты, которые могут быть вызваны проводным соединителем 122, когда зондовое и двигательное устройства перемещаются пользователем.
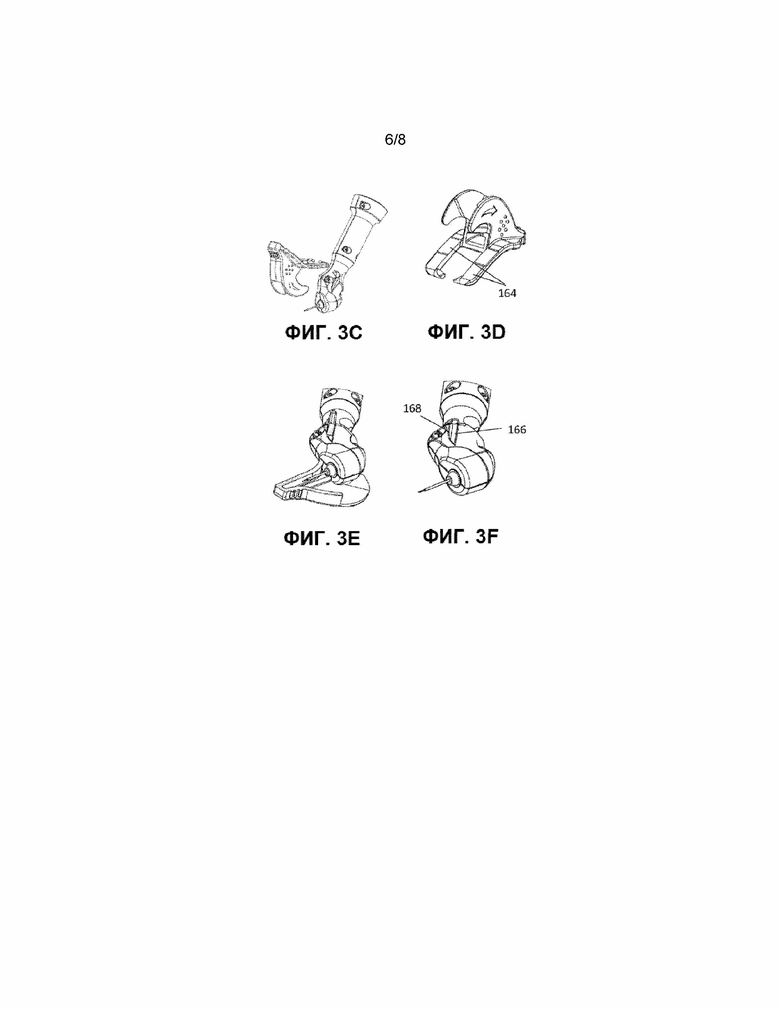
На ФИГ. 3A–3F показан неограничивающий пример крышки, используемой в одноразовом зонде для удерживания режущего инструмента безопасно закрытым, если он не используется, для предотвращения случайной травмы. Согласно настоящему изобретению крышка выполнена с возможностью перемещения по заданному пространственному пути между закрытым положением, закрывающим режущий инструмент, и открытым положением, открывающим режущий инструмент, в то время как он также соединен с головочной частью зонда. Крышка также повышает безопасность, поскольку она должна проходить пороговое расстояние вдоль пространственного пути, чтобы наконец остаться в открытом положении, в противном случае она самостоятельно возвращается назад в свое закрытое положение. Таким образом, обеспечена дополнительная мера безопасности, поскольку крышка не отделяется от зонда, если она не находится в своем открытом положении, в результате чего, помимо прочего, предотвращено или по меньшей мере минимизировано случайное столкновение с режущим инструментом, поскольку направление отделения не совпадает с осью режущего инструмента, так что даже при неудачном удалении крышки рука пользователя случайно не перемещается к режущему инструменту или по меньшей мере его острой вершине. Кроме того, также дополнительная мера безопасности обеспечена предохранительным блокирующим механизмом, который удерживает закрытую крышку на месте, пока к ней не будет приложено усилие для ее открытия.
В описанном примере, показанном на ФИГ. 3A и 3B, крышка 160 перемещается по криволинейному пути, например, по кругу или полукругу, вокруг шарнирной точки 162, образованной углублением в корпусе зонда, например, в головочной части, для открытия режущего инструмента. Крышка 160 перемещается в верхнем направлении, т.е. не вниз, для облегчения ее удаления пользователем. Когда передняя часть крышки достигает определенного положения, ее можно стянуть с зонда. Если крышка не прошла заданное расстояние до ее открытого положения, она возвращается назад в свое закрытое положение, так что она не может оставаться в частично открытом положении, в котором увеличивается риск случайной травмы. Пороговый защитный механизм может быть реализован различными способами, такими как обеспечение пружины, которая действует против перемещения, пока она не исчерпает свою упругость, или пока крышка не будет заблокирована в своем открытом положении подходящим выступом, предотвращающим ее обратное перемещение. В описанном примере пороговая безопасность достигается специальной конструкцией щечек, которые действуют подобно пружинам, выталкивая крышку 160 в направлении к передней стороне зонда, если крышка не достигает открытого положения, и блокируют ее в этом положении.
Кроме того, зонд содержит фиксирующий защитный механизм, который удерживает крышку в закрытом положении и предотвращает ее случайное открывание. Такой защитный механизм в описанном примере обеспечен углублением 166 в корпусе зонда, таким как выполненная в головочной части выемка, которая захватывает щечки 164 и удерживает их в закрытом положении, как показано на ФИГ. 3E и 3F. Открывание крышки требует преодоления выступа 168 таким образом, чтобы щечки смогли пройти поверх выступов 168 с обеих сторон.
В дополнение к вышеуказанным защитным механизмам устройство содержит электрический защитный механизм. Вращающийся режущий инструмент активируется управляющим блоком после приема управляющим блоком входного сигнала заданной длительности от пользователя. Входной сигнал от пользователя может быть обеспечен посредством пульта управления, например, при касании значка на сенсорном экране дисплея, или обеспечен нажатием заданной длительности на педаль. Например, в случае использования педали, если пользователь нажимает на педаль в течение периода времени, который короче, чем заданный период времени (например, составляет половину секунды), режущий инструмент не активируется управляющим блоком. Такой подход минимизирует вероятность неумышленной активации режущего инструмента.
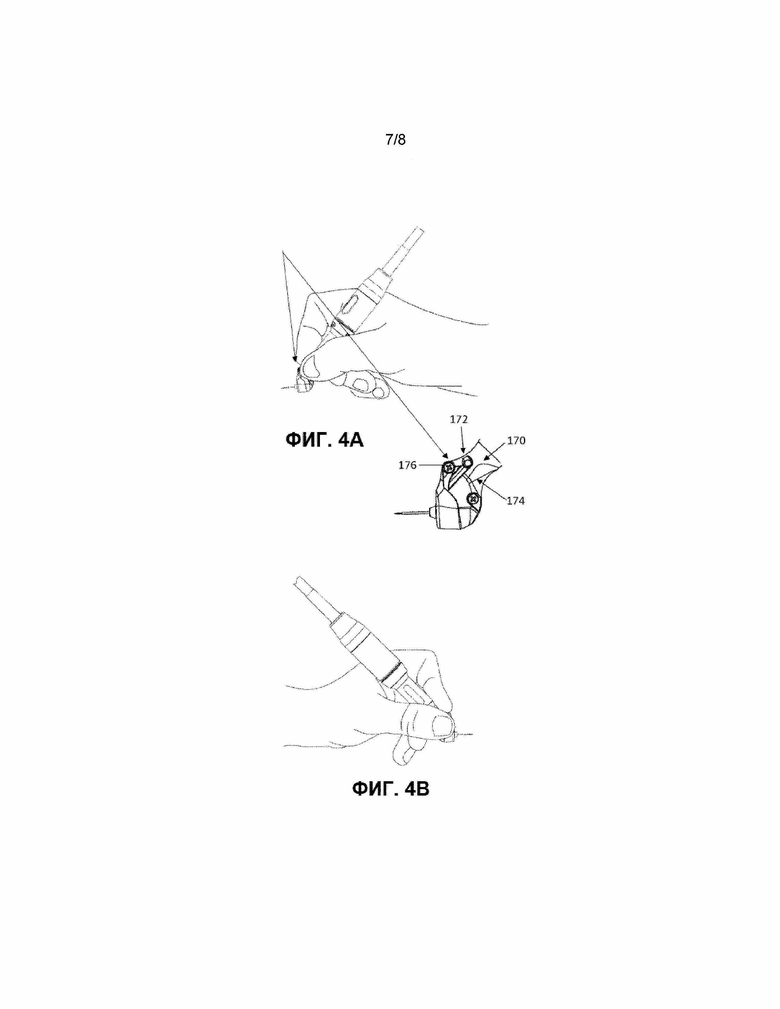
Настоящее изобретение улучшает эргономику зонда для обеспечения удобного, эффективного и управляемого использования. Такие требования особенно важны при лечении чувствительных органов, таких как глаз, поскольку точная ориентация зонда и управление усилием, приложенным оператором, являются важным. На ФИГ. 4A–4B показаны неограничивающие примеры признаков, улучшающих эргономику. Согласно некоторым вариантам реализации, как показано на ФИГ. 4A, зонд 110 содержит эргономичную удерживающую часть 170 в ее дистальном участке, которая предназначена для облегчения захвата зонда. Удерживающая часть содержит выделенные выемки 172 и 174 для размещения указательного пальца и большого пальца соответственно. Удерживающая часть также содержит выступ 176 рядом с выемкой 172, который действует в качестве указателя, когда пользователь нажимает на него своим указательным пальцем. Кроме того, зонд согласно настоящему изобретению, в частности, его удерживающая часть выполнена с обеспечением возможности удобного и одинакового использования как пользователями–правшами, так и пользователями–левшами. На ФИГ. 4A показана правая рука, удерживающая зонд, и на ФИГ. 4B показана левая рука, удерживающая зонд.
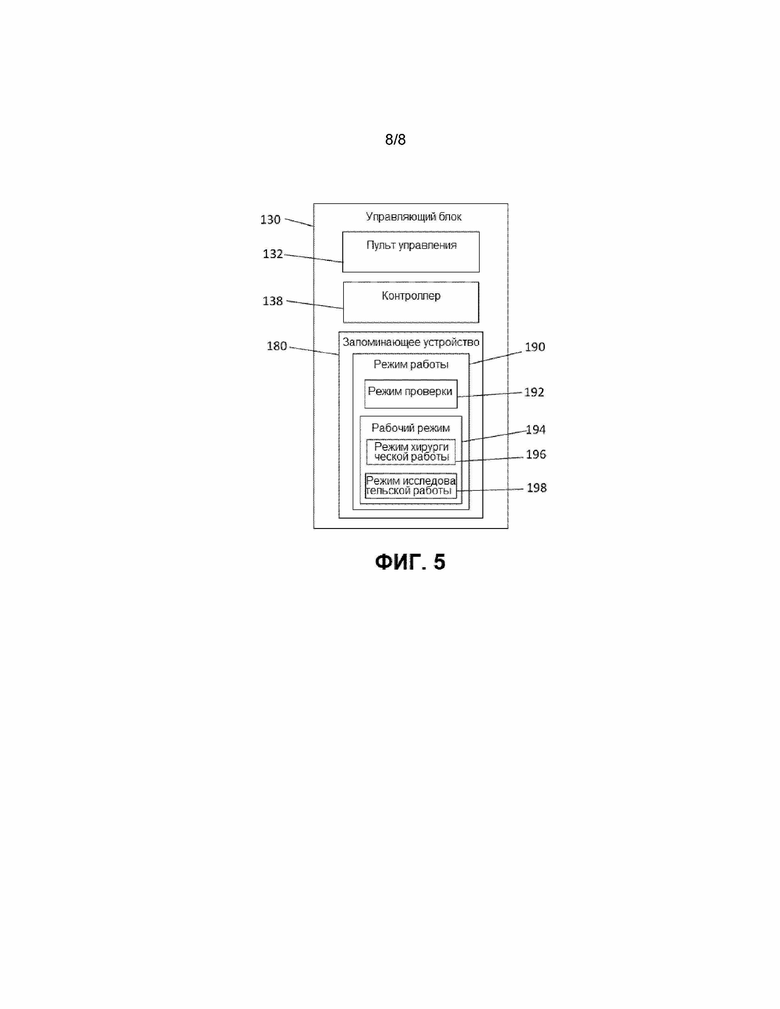
На ФИГ. 5 показаны неограничивающие примеры управляющего блока устройства, содержащего пульт управления, который может быть выполнен в форме сенсорного экрана с возможностью обеспечения управления работой устройства. Управляющим блоком является вычислительное устройство, которое управляет режимом работы устройства, включая параметры лечения или функции хирургического процесса, а также процесса проверки. На чертеже показана схема компонентов управляющего блока 130. Управляющий блок 130 содержит пульт 132 управления, который выполнен с обеспечением возможности для пользователя выбрать необходимый режим 190 работы, сохраненный в запоминающем устройстве 180. Контроллер 138, выполненный с возможностью осуществления выбранного режима работы, включая параметры или функции, расположен в управляющем блоке и соединен с запоминающим устройством 180.
Режимы 190 работы включают режим 192 проверки и рабочий режим 194, причем последний содержит режим 196 хирургической работы и режим 198 исследовательской работы.
Управляющий блок 130, используя контроллер 138, непрерывно отслеживает работу частей устройства для обеспечения нормальной работы устройства. Например, отслеживаются следующие состояния и параметры: соединение между различными частями (двигателем и зондом, двигателем и управляющим блоком, управляющим блоком и ножным переключателем (педалью)), скорость двигателя, время нажатия педали пользователем, количество активаций двигателя в качестве индикатора срока службы двигателя (например, 250 циклов), который ограничен нагрузкой при стерилизации. Устройство может содержать подходящие датчики (не показаны), которые передают информацию контроллеру 138 о работе устройства и его различных частей, включая отслеживаемые параметры, описанные выше. Одним из примеров является магнитный датчик угла поворота, описанный выше в отношении вращающегося двигательного устройства. Согласно некоторым вариантам реализации контроллер передает сигналы (например, электрические) двигательному устройству и/или педальному устройству через определенные заданные интервалы времени (например, каждые 100 миллисекунд), и на основании указанных принятых сигналов может быть обнаружена ошибка, и сгенерирован соответствующий аварийный выходной сигнал. Контроллер 138 может содержать программируемый чип, обеспечивающий возможность добавления или изменения функций контроллера.
Режим 192 проверки может быть режимом самодиагностики, которая автоматически выполняется каждый раз, когда включают устройство, или каждый раз, когда управляющий контроллер обнаруживает ошибку в работе устройства, такую как ошибка соединения между управляющим блоком и двигателем. В дополнение к данному или согласно другому варианту реализации режим 192 проверки может быть задействован после запроса пользователя при выборе этого режима посредством пульта 132 управления. Контроллер 138 выпускает соответствующее предупреждение согласно ошибке, обнаруженной во время прогона самопроверки или в результате непрерывного отслеживания, примененного во время рабочих режимов 194, описанных выше. Согласно одному варианту реализации режим проверки исследует скорость двигателя с целью обнаружения отказов или предупреждения об окончании срока службы. В таком случае контроллер активирует двигатель в течение заданного периода времени, считает количество оборотов, выполненных двигателем, и сравнивает результат со значением, сохраненным в запоминающем устройстве 180. Если результат находится за пределами заданного диапазона для сохраненного значения, контроллер генерирует предупреждение об ошибке. Например, предупреждение может указывать, что срок службы двигателя истек, и он должен быть заменен, что кабельный соединитель не функционирует надлежащим образом, или датчик для отслеживания двигателя не действует надлежащим образом.
Контроллер 138 может быть запрограммирован таким образом, что после окончания режима проверки устройство автоматически переключается в рабочий режим 194. По умолчанию выбран режим 196 хирургической работы. Этот режим является заданным режимом, для которого используются рабочие параметры устройства, зафиксированные в заданных рекомендуемых значениях, которые подходят конкретной хирургической операции, индивидуальным характеристикам органа тела пациента, популяции/расе пациентов или породе пациентов–животных. Управляющий блок может быть запрограммирован с возможностью выполнения множества режимов хирургической работы с сохранением заданных рабочих параметров для каждого режима работы, к которым оператор может получить доступ простым нажатием кнопки на пульте управления (например, иконки/плитки на сенсорном экране). Например, при удалении ткани из склеры глаза частота вращения двигателя настраивается на скорость 8000 об/мин, и время каждой активации выбирается 0,4 сек. Однако при лечении животных, например, лошадей или собак, страдающих повышенным внутриглазным давлением, значения являются различными и конкретными для различных пород животных. В качестве используемых значений рабочих параметров могут быть рекомендованы значения, выбранные на основании опыта и/или экспериментов.
При исследовании новой хирургической операции или органа тела/ткани пациента устройство может быть переключено в режим исследовательской работы, который позволяет пользователю управлять и изменять значения параметров. Для гарантии безопасного использования доступ к режиму исследовательской работы может быть защищен пин–кодом или паролем. Параметры, которыми можно управлять, включают помимо прочего скорость вращения, длительность вращения, направление вращения (по часовой стрелке, против часовой стрелки или комбинация вышеперечисленного) и коэффициент передачи между двигателем и режущим инструментом. Затем пользователь может сохранить новый рабочий режим, включая значения параметров, которые он использовал в исследовании, и к которым он без помех снова получит доступ в будущем.
Пульт управления содержит дружественный пользовательский интерфейс, который позволяет пользователю выбрать режим работы устройства, а также различные рабочие параметры.
Таким образом, согласно настоящему изобретению предложено устройство, которое обеспечивает всестороннее, мощное и безопасное решение для удаления тканей тела пациента. Кроме того, как описано выше, настоящее изобретение может быть эффективно встроено в другие устройства для лечения, таким образом обеспечивая экономию рабочего пространства и улучшая эргономику операционных.
Группа изобретений относится к области медицинских устройств и, в частности, к хирургическим инструментам. Представлено устройство для использования при удалении ткани из органа тела. Устройство содержит переносное зондовое устройство, вращающееся двигательное устройство и соединительный узел, выполненный с возможностью соединения разъединяемым способом переносного зондового устройства с вращающимся двигательным устройством. Переносное зондовое устройство является одноразовым и содержит корпус, имеющий проксимальный и дистальный концы, выполненный с возможностью вращения режущий инструмент, проходящий в дистальном направлении от дистального конца корпуса и выполненный с возможностью резания и удаления ткани во время вращения, и трансмиссионный узел, проходящий в корпусе между проксимальным и дистальным концами и выполненный с возможностью передачи крутящего момента выполненному с возможностью вращения режущему инструменту. Соединительный узел выполнен с возможностью обеспечения взаимодействия между вращающимся двигательным устройством и трансмиссионным узлом для обеспечения таким образом управляемого вращения режущего инструмента и удаления ткани. Согласно некоторым вариантам реализации устройство содержит управляющий блок для управления работой устройства, причем управляющий блок содержит механизм активации для активирования выполненного с возможностью вращения режущего инструмента и контроллер, выполненный с возможностью управления механизмом активации, для генерирования одиночного фиксированного сигнала активации с известной интенсивностью и длительностью в течение заданного временного интервала, таким образом ограничивающего работу режущего инструмента в течение указанного временного интервала, определенного только указанным одиночным сигналом активации. 2 н. и 22 з.п. ф-лы, 18 ил.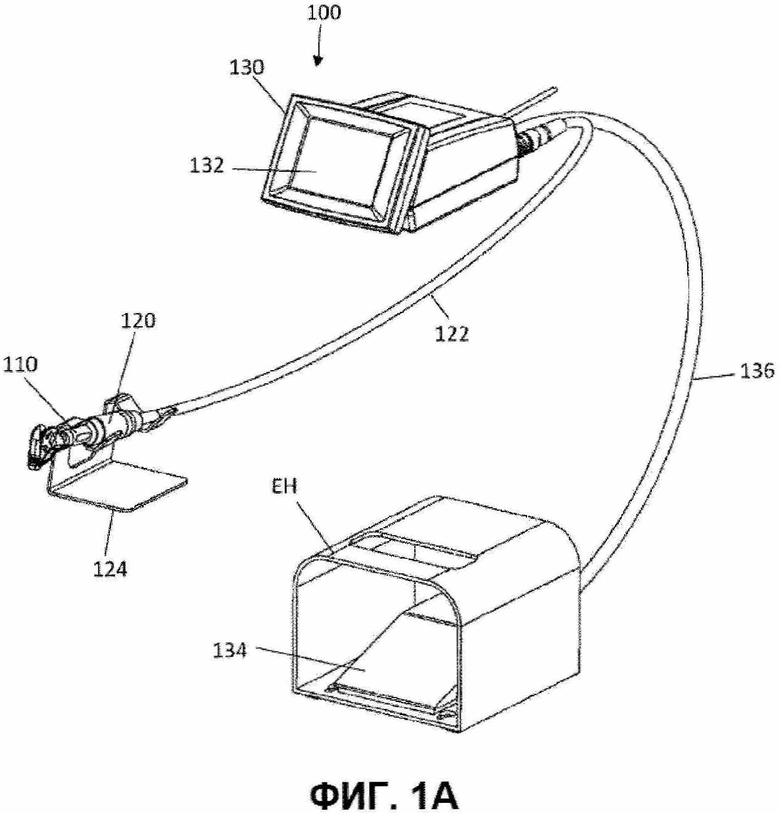
1. Устройство для использования при удалении ткани из органа тела, содержащее переносное зондовое устройство и, вращающееся двигательное устройство, размещенные в первом и втором отдельных корпусах, соответственно, и соединительный узел, выполненный с возможностью соединения разъединяемым способом переносного зондового устройства с вращающимся двигательным устройством;
переносное зондовое устройство является одноразовым, используемым только один раз устройством, таким образом, обеспечивая стерильность указанного переносного зондового устройства, причем указанное вращающееся двигательное устройство выполнено с возможностью многоразового использования, при этом переносное зондовое устройство содержит: первый корпус, имеющий проксимальный и дистальный концы; выполненный с возможностью вращения режущий инструмент, проходящий в дистальном направлении от указанного дистального конца первого корпуса и выполненный с возможностью резания и удаления ткани во время вращения; и трансмиссионный узел, проходящий в указанном первом корпусе между указанными проксимальным и дистальным концами и выполненный с возможностью передачи крутящего момента выполненному с возможностью вращения режущему инструменту;
соединительный узел расположен между проксимальным концом первого корпуса переносного зондового устройства и дистальной стороной второго корпуса вращающегося двигательного устройства и выполнен с возможностью обеспечения взаимодействия между вращающимся двигательным устройством и трансмиссионным узлом переносного зондового устройства для обеспечения таким образом управляемого вращения режущего инструмента и удаления ткани.
2. Устройство по п. 1, также содержащее управляющий блок, выполненный с возможностью соединения с вращающимся двигательным устройством, а также, будучи соединенным с вращающимся двигательным устройством, с возможностью активации вращающегося двигательного устройства в механизме управляемой активации.
3. Устройство по п. 1 или 2, в котором соединительный узел выполнен с возможностью обеспечения соединения вращающегося двигательного устройства с переносным зондовым устройством по меньшей мере в двух относительных ориентациях.
4. Устройство по любому из предшествующих пунктов, в котором соединительный узел содержит реверсивный соединитель.
5. Устройство по любому из предшествующих пунктов, в котором первый корпус содержит удлиненную часть и головочную часть, размещенные последовательно от проксимального конца до дистального конца первого корпуса.
6. Устройство по п. 5, в котором удлиненная часть и головочная часть образованы как единое целое.
7. Устройство по п. 5 или 6, в котором указанная головочная часть ориентирована под заданным углом относительно удлиненной части, причем указанный заданный угол выбирается в соответствии с ориентацией поверхности лечения органа тела.
8. Устройство по любому из пп. 5–7, в котором указанная удлиненная часть имеет заданную длину, выбранную с возможностью обеспечения устойчивого положения удерживания устройства во время работы.
9. Устройство по п. 8, в котором указанное устойчивое положение удерживания таково, что указанное вращающееся двигательное устройство опирается на первую дорсальную межкостную мышцу пользователя, удерживающего устройство.
10. Устройство по любому из предшествующих пунктов, в котором указанное переносное зондовое устройство содержит удерживающую часть, позволяющую пользователю управлять пространственной ориентацией выполненного с возможностью вращения режущего инструмента.
11. Устройство по п. 10, в котором указанная удерживающая часть содержит выемку, в которой пользователь размещает свой указательный палец, для управления таким образом пространственной ориентацией выполненного с возможностью вращения режущего инструмента.
12. Устройство по п. 10 или 11, в котором удерживающая часть выполнена с обеспечением возможности управления устройством как пользователями-левшами, так и пользователями-правшами.
13. Устройство по любому из предшествующих пунктов, в котором указанный трансмиссионный узел прикладывает как вращательное усилие, так и усилие подачи к режущему инструменту, так чтобы обеспечить осевой зазор, таким образом улучшая взаимодействие режущего инструмента с органом тела во время работы.
14. Устройство по любому из предшествующих пунктов, в котором первый корпус содержит удаляемую крышку, выполненную с возможностью безопасного закрывания режущего инструмента, когда он не используется.
15. Устройство по п. 14, в котором крышка выполнена с возможностью перемещения по заданному пространственному пути между закрытым положением, в котором режущий инструмент закрыт, и открытым положением, в котором режущий инструмент открыт, причем крышка в это время остается прикрепленной к корпусу.
16. Устройство по п. 14 или 15, в котором переносное зондовое устройство содержит безопасный открывающий механизм, выполненный с возможностью возвращения крышки в ее закрытое положение, если крышка не проходит заданное расстояние вдоль указанного пространственного пути.
17. Устройство по п. 15 или 16, в котором переносное зондовое устройство содержит безопасный фиксирующий механизм, выполненный с возможностью удерживания крышки в закрытом положении, если пользователь не толкает ее вдоль указанного пространственного пути.
18. Устройство по любому из пп. 14–17, в котором указанная крышка является отделяемой от первого корпуса только в ее открытом положении.
19. Устройство по любому из пп. 15–18, в котором открытое положение крышки обеспечивает возможность ее удаления оттягиванием в направлении, не совпадающем с продольной осью режущего инструмента.
20. Устройство по любому из пп. 2–19, в котором управляющий блок содержит сенсорный экран.
21. Устройство по любому из пп. 2–20, в котором управляющий блок предварительно запрограммирован с возможностью активации вращающегося двигателя при генерации одиночного фиксированного сигнала активации с известной скоростью вращения и длительностью в течение заданного временного интервала.
22. Устройство по любому из предшествующих пунктов, также содержащее педаль для активации заданных функций активации для управляемого вращения указанного режущего инструмента.
23. Устройство по любому из предшествующих пунктов, в котором указанным органом тела является глаз и указанный режущий инструмент выполнен с возможностью создания канала в склере глаза.
24. Переносное зондовое устройство, содержащее выполненный с возможностью вращения режущий инструмент и выполненное с возможностью соединения режущего инструмента с наружным вращающимся двигательным устройством, в результате чего зондовое устройство с режущим инструментом является одноразовым, используемым только один раз устройством, а вращающееся двигательное устройство является многоразовым; переносное зондовое устройство содержит: полый корпус, имеющий проксимальный и дистальный концы и содержащий удлиненную часть и головочную часть, расположенные с заданным углом между ними последовательно от проксимального конца до дистального конца; и трансмиссионный узел, проходящий в корпусе и соединенный на одном конце с режущим инструментом и на другом конце – с соединительным узлом, связанным с наружным вращающимся двигательным устройством для управляемой таким образом передачи мощности от наружного вращающегося двигательного устройства режущему инструменту.
| US 8038692 B2, 18.10.2011 | |||
| УДАЛЕНИЕ ТКАНИ ИЗ ОКОЛОНОСОВОЙ ПАЗУХИ И НОСОВОЙ ПОЛОСТИ | 2010 |
|
RU2572745C2 |
| US 8361098 B2, 29.01.2013. | |||

