Из патента Германии DE 19510755 С2 известно тормозное оборудование для имеющей несколько тормозных систем рельсовой самодвижущейся единицы подвижного состава. В этом известном тормозном оборудовании тормозное действие контролируется путем обнаружения замедления в случае торможения и при слишком низком тормозном действии генерируется сигнал замедления. С помощью этого сигнала замедления автоматически срабатывают действия, которые приводят с помощью всех тормозных систем, существующих на рельсовом транспортном средстве, к максимально возможному действию остаточного торможения. При этом также активизируется песочница локомотива, чтобы принять во внимание возможный случай ошибки, состоящий в том, что распознанный посредством появления сигнала ошибки отказ тормозов мог бы привести к очень низкому силовому замыканию между колесом и рельсом. Это приводит к тому, что из-за активированной песочницы при обстоятельствах происходит избыточный износ колеса и рельса, и песок может также быть разбросан и в зоне чувствительных остряков стрелочного перевода. Кроме того, должна использоваться относительно объемная и, следовательно, дорогостоящая песочница локомотива.
В основе изобретения лежит задача предложить способ контроля тормозной системы тормозного оборудования с несколькими тормозными системами рельсового транспортного средства, который может быть реализован относительно экономичным образом при защите колес и рельсовой системы.
Решение этой задачи в соответствии с изобретением заключается в способе контроля тормозной системы тормозного оборудования рельсового транспортного средства, в котором определяется замедление рельсового транспортного средства с получением измеренной величины замедления и определяется силовое замыкание между колесом и рельсом с получением измеренной величины силового замыкания; при малой измеренной величине замедления и нормальной измеренной величине силового замыкания генерируется сигнал сообщения об ошибке.
Основным преимуществом способа, соответствующего изобретению, является то, что сигнал сообщения об ошибке генерируется только тогда, когда контролируемая тормозная система на самом деле неисправна или повреждена, так что только тогда целенаправленно, например, активируется песочница и/или включается дополнительная тормозная система. Поэтому в способе, соответствующем изобретению, применение песка является более экономичным, что позволяет использовать относительно небольшую песочницу и сберегать колеса и рельсовую систему.
Другое решение вышеуказанной задачи в соответствии с изобретением заключается в способе для контроля тормозной системы с по меньшей мере одним тормозным приводом тормозного оборудования с несколькими тормозными системами рельсового транспортного средства, при котором определяется замедление рельсового транспортного средства с получением измеренной величины замедления и измеряется тормозное усилие по меньшей мере одного тормозного привода; при малой измеренной величине замедления и низком тормозном усилии генерируется сигнал сообщения об ошибке. Тормозной привод предпочтительно является электродвигателем.
Эта форма выполнения способа согласно изобретению выгодна прежде всего тем, что и здесь дополнительная тормозная система подключается не сразу же, а сначала проверяется, является ли недостаточное замедление с высокой вероятностью действительно вызванным повреждением контролируемой тормозной системы. В остальном и в этой форме выполнения возникают преимущества, перечисленные выше.
В способе согласно изобретению замедление рельсового транспортного средства может быть обнаружено различными способами. Для достижения по возможности точного определения из измеренного фактического значения замедления и предопределенного заданного значения замедления формируется фактическое значение разности замедления, которое сравнивается с пороговым значением разности замедления с образованием промежуточного значения разности замедления; при промежуточном значении разности замедления более высоком, чем допустимое значение, генерируется промежуточный сигнал сообщения об ошибке.
В частности, в тормозной системе тормозного оборудования рельсового транспортного средства для диапазона высоких скоростей считается предпочтительным, если заданное значение замедления изменяется в зависимости от измеренного фактического значения скорости рельсового транспортного средства.
Чтобы не получать сигнал сообщения об ошибке каждый раз, когда на малой скорости движения рельсовое транспортное средство приводится к остановке, преимущественно фактическое значение скорости рельсового транспортного средства сравнивается с предельным значением скорости; при фактическом значении скорости, лежащем ниже предельного значения скорости, формирование сигнала сообщения об ошибке блокируется.
Альтернативно предпочтительным образом может измеряться фактическое значение скорости рельсового транспортного средства и сравниваться с предельным значением скорости, и при фактическом значении скорости, лежащем ниже предельного значения скорости, пороговое значение разности замедления может быть повышено.
Силовое замыкание между колесом и рельсом может определяться в способе согласно изобретению по-разному. В качестве особенно предпочтительного рассматривается, если для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства измеряется фактическое значение проскальзывания и сравнивается с предопределенным пороговым значением проскальзывания; при фактическом значении проскальзывания, лежащем выше порогового значения проскальзывания, формируется соответствующее пороговое значение разности замедления в качестве измеренной величины силового замыкания.
При этом оно служит предпочтительно для повышения точности определения, если пороговое значение разности замедления увеличивается соответственно определенному количеству колесных пар с фактическими значениями проскальзывания, лежащими выше порогового значения проскальзывания.
Также может быть предпочтительным, если для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства определяется фактическое значение силового замыкания в контакте колесо-шина и сравнивается с предопределенным пороговым значением силового замыкания, а также при фактическом значении силового замыкания, лежащем ниже порогового значения силового замыкания, формируется соответствующее пороговое значение разности замедления в качестве измеренной величины силового замыкания.
При этом также является предпочтительным, если пороговое значение разности замедления увеличивается соответственно определенному количеству колесных пар с фактическими значениями силового замыкания, лежащими ниже порогового значения силового замыкания.
Для того чтобы проверить, возможно ли, что в тормозной системе с тормозными приводами последние не вырабатывают приводного действия, в соответствующем изобретению способе предпочтительным образом, в случае тормозной системы с по меньшей мере одним тормозным приводом сигнал измерения замедления и измеренная величина скорости рельсового транспортного средства проверяются в отношении их знаков, и при одинаковых знаках сразу же генерируется сигнал ошибки для подключения дополнительной тормозной системы.
В способе согласно изобретению для определения измеренных величин замедления и скорости могут использоваться датчики, выполненные различным образом. Особенно предпочтительным является использование пакета инерциальных датчиков. Это особенно верно для случая, когда должны определяться знаки замедления и скорости рельсового транспортного средства.
В способе согласно изобретению с определением тормозного усилия от тормозных приводов это усилие может быть измерено различными способами. Так, представляется выгодным, когда измерение тормозного усилия осуществляется посредством измерения усилия и/или крутящего момента на оси рельсового транспортного средства, ассоциированной с тормозным приводом.
Но также может быть выгодным осуществлять измерение тормозного усилия с помощью датчиков на обратимо деформируемом за счет торможения деформируемом теле.
Кроме того, измерение тормозного усилия, в случае электрического привода, может выполняться предпочтительным образом путем измерения токов и напряжений.
Дальнейшая обработка измеренного тормозного усилия предпочтительно проводится таким образом, что из измеренного фактического значения усилия и предопределенного заданного значения усилия формируется разностное фактическое значение усилия, разностное фактическое значение усилия сравнивается с пороговым значением разностного усилия с формированием промежуточного значения разностного усилия, и при промежуточном значении разностного усилия, лежащем выше значения допуска, генерируется сигнал недостаточного усилия.
В случае рельсового транспортного средства, в частности, высокоскоростного диапазона может быть предпочтительным, если заданное значение усилия изменяется в зависимости от измеренного фактического значения скорости рельсового транспортного средства.
Также может быть предпочтительным, если заданное значение усилия изменяется в зависимости от числа оборотов колесной пары, связанной с тормозным приводом.
Кроме того, задачей изобретения является предложить устройство для контроля тормозной системы тормозного оборудования с несколькими тормозными системами рельсового транспортного средства, с помощью которого контроль тормозной системы может выполняться экономичным способом при обеспечении защиты колеса и рельсовой системы.
Для решения этой задачи в соответствии с изобретением служит устройство для контроля тормозной системы тормозного оборудования с несколькими тормозными системами рельсового транспортного средства с измерительным устройством для измерения замедления рельсового транспортного средства, измерительным устройством для измерения силового замыкания между колесом и рельсом и устройством оценки, расположенным после упомянутых измерительных устройств, которое при незначительном замедлении рельсового транспортного средства и нормальном силовом замыкании между колесом и рельсом выдает сигнал сообщения об ошибке.
Тем самым могут быть получены те же преимущества, которые уже упоминались выше для способа согласно изобретению.
Другое решение вышеуказанной задачи состоит в устройстве для контроля тормозной системы с по меньшей мере одним тормозным приводом тормозного оборудования с несколькими тормозными системами рельсового транспортного средства с измерительным устройством для измерения замедления рельсового транспортного средства, измерительным устройством для измерения тормозного усилия по меньшей мере одного тормозного привода и устройством оценки, расположенным после упомянутых измерительных устройств, которое при низком замедлении и низком тормозном усилии выдает сигнал сообщения об ошибке.
Тем самым, могут быть достигнуты те же преимущества, что и получаемые описанным выше способом контроля тормозной системы с по меньшей мере одним тормозным приводом.
В устройстве согласно изобретению измерительное устройство может быть выполнено различным образом. Особенно предпочтительно измерительное устройство выполнено таким образом, что оно из измеренного фактического значения замедления и предопределенного заданного значения замедления формирует разностное фактическое значение замедления в качестве измеренной величины замедления сравнивает разностное фактическое значение замедления с пороговым значением разности замедления в качестве измеренной величины силового замыкания с формированием промежуточного значения разности замедления и при промежуточном значении разности замедления, лежащем выше допустимого значения, генерирует промежуточный сигнал сообщения об ошибке.
Также в отношении определения скорости соответствующее изобретению устройство может быть выполнено различным образом. В качестве предпочтительного представляется, что перед устройством оценки расположено воспринимающее устройство, в котором фактическое значение скорости рельсового транспортного средства сравнивается с предельным значением скорости и которое при фактическом значении скорости, лежащем ниже предельного значения скорости, выдает на устройство оценки сигнал блокировки, с помощью которого формирование сигнала сообщения об ошибке в устройстве оценки блокируется.
Во избежание того, что не каждый раз выдается сигнал сообщения об ошибке, если рельсовое транспортное средство останавливается, предпочтительным образом измерительное устройство на стороне входа имеет каскад оценки, который соединен своим входом с выходом пакета инерциальных датчиков и выполнен таким образом, что он на своем выходе выдает измеренную величину скорости рельсового транспортного средства, не подверженную влиянию ускорения силы тяжести и центробежного ускорения. Пакет инерциальных датчиков известен, например, из http://de.wikipedia.org/wiki/Inertialsensor.
Кроме того, предпочтительно, если каскад оценки на выходной стороне также соединен с измерительным устройством и там со своей измеренной величиной скорости обуславливает то, что при фактическом значении скорости, лежащем ниже предельного значения скорости, происходит увеличение порогового значения разности замедления.
Альтернативно также может быть так, что при скорости, лежащей ниже предопределенного порога, проверка на слишком низкое фактическое значение замедления вообще не выполняется.
С помощью соответствующего изобретению устройства силовое замыкание между колесом и рельсом может определяться различными способами; для этого известно несколько возможностей. Предпочтительным является, если в соответствующем изобретению устройстве для определения силового замыкания между колесом и рельсом на по меньшей этой одной колесной паре рельсового транспортного средства предусмотрен каскад измерения фактического значения проскальзывания, в котором измеренное фактическое значение проскальзывания сравнивается с предопределенным пороговым значением проскальзывания и которое при фактическом значении проскальзывания, лежащем выше порогового значения проскальзывания, вызывает увеличение соответствующего порогового значения разности замедления.
В этой связи также выгодно, если имеется счетчик для определения количества колесных пар с фактическими значениями проскальзывания, лежащими выше порогового значения проскальзывания, который формирует сигнал для увеличения порогового значения разности замедления соответственно определенному количеству колесных пар с фактическими значениями проскальзывания, лежащими выше порогового значения проскальзывания.
Также предпочтительным представляется, если для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства предусмотрен каскад измерения для фактического значения силового замыкания в контакте колесо-рельс, который выполнен с возможностью сравнения фактического значения силового замыкания с заданным пороговым значением силового замыкания и формирования соответствующего порогового значения разности замедления при фактическом значении силового замыкания, лежащем ниже порогового значения силового замыкания.
В этой форме выполнения соответствующего изобретению устройства предпочтительно имеется счетчик, который определяет количество колесных пар с фактическими значениями силового замыкания, лежащими ниже порогового значения силового замыкания, и выдает сигнал счета для повышения порогового значения разности замедления соответственно определенному количеству колесных пар с фактическими значениями силового замыкания, лежащими ниже порогового значения силового замыкания.
Чтобы в соответствующем изобретению устройстве с тормозным приводом непосредственно проверять повреждение тормозной системы, предпочтительно, если перед измерительным устройством соответствующего изобретению устройства расположен по меньшей мере один измеритель усилия/крутящего момента, который размещен на оси рельсового транспортного средства, ассоциированной с тормозным приводом.
Особенно предпочтительно, если измерительное устройство и устройство оценки выполнены так, что они из измеренного фактического значения тормозного усилия и предопределенного заданного значения тормозного усилия формируют фактическое значение разности тормозного усилия, сравнивают фактическое значение разности тормозного усилия с пороговым значением разности тормозного усилия с формированием промежуточного значения разности тормозного усилия и при промежуточном значении разности тормозного усилия, лежащем ниже допустимого значения, формируют сигнал недостаточности тормозного усилия (LF).
Но также может быть предпочтительным предусмотреть обратимо деформируемое за счет торможения деформируемое тело с датчиками для измерения тормозного усилия.
Альтернативно или в дополнение предпочтительно в случае электрического привода с ним может быть связано устройство измерения тока и/или напряжения для измерения тормозного усилия.
Кроме того, в качестве предпочтительного рассматривается, если предусмотрен быстродействующий каскад подключения, который на входной стороне нагружается измеренной величиной, пропорциональной замедлению, а также измеренной величиной, пропорциональной скорости рельсового транспортного средства, и выполнен таким образом, что он проверяет измеренные величины в отношении их знаков и при одинаковых знаках немедленно формирует сигнал ошибки для подключения дополнительной тормозной системы. Такой быстродействующий каскад подключения предпочтительно может использоваться не только в этой связи, но и в общем случае, при любом устройстве для контроля тормозной системы, в котором помимо замедления также определяется скорость рельсового транспортного средства.
Для этого предпочтительным образом предусмотрен пакет инерциальных датчиков, с помощью которого определяется величина и знак замедления и скорости рельсового транспортного средства.
Изобретение поясняется ниже со ссылками на чертежи, на которых в форме блок-схемы представлено следующее:
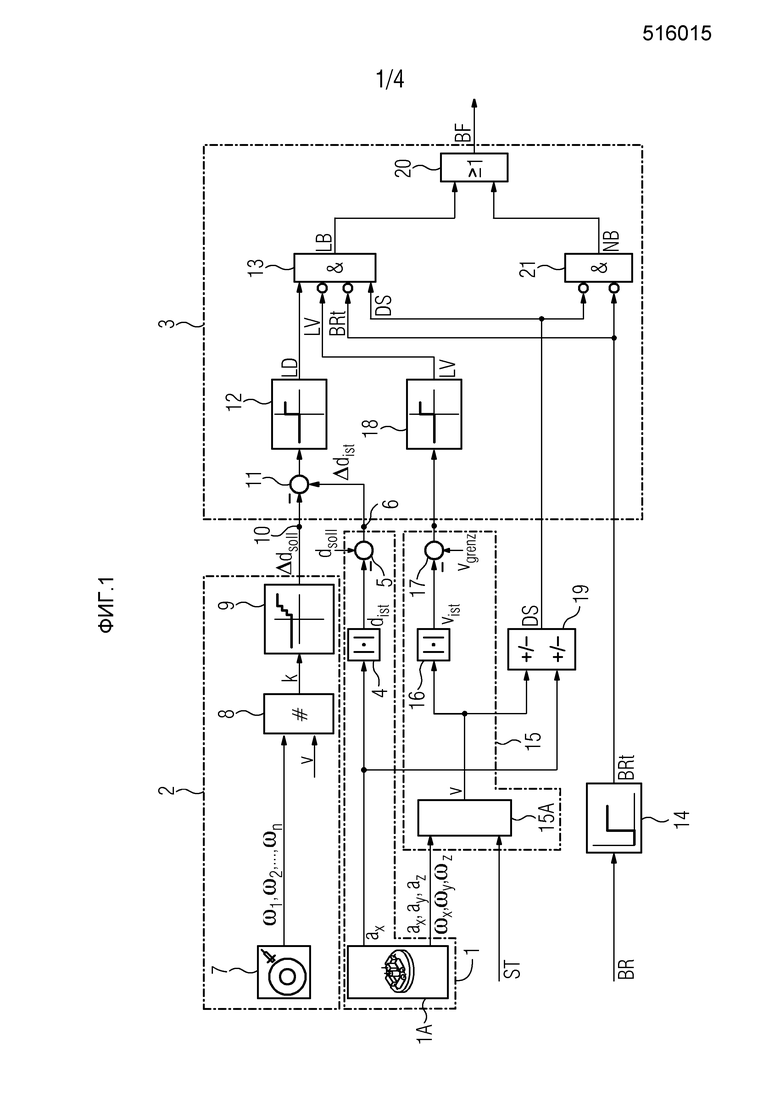
Фиг. 1 - пример выполнения соответствующего изобретению устройства для контроля тормозной системы,
Фиг. 2 - пример выполнения каскада оценки согласно примеру выполнения по Фиг. 1,
Фиг. 3 - другой пример выполнения соответствующего изобретению устройства для контроля тормозной системы с тормозным приводом и
Фиг. 4 - дополнительный пример выполнения соответствующего изобретению устройства в упрощенном выполнении по сравнению с примером выполнения по Фиг. 3.
Показанное на Фиг. 1 устройство для контроля тормозной системы тормозного оборудования рельсового транспортного средства, которое не показано, содержит в качестве основных компонентов измерительное устройство 1 для определения замедления рельсового транспортного средства, измерительное устройство 2 для определения силового замыкания между колесом и рельсом в рельсовом транспортном средстве, и устройство 3 оценки, которое при замедлении рельсового транспортного средства, низком по сравнению с нормальным случаем, и нормальном силовом замыкании между колесом и рельсом выдает сигнал BF сообщения об ошибке.
Измерительное устройство 1 включает в себя пакет 1А инерциальных датчиков, который имеет датчик ускорения, не показанный детально, который расположен параллельно продольной оси рельсового транспортного средства. С помощью этого датчика ускорения пакета 1А инерциальных датчиков измеряется значение ах замедления. К пакету 1А инерциальных датчиков или к его датчику ускорения подключен формирователь 4 абсолютного значения, который формирует абсолютное значение измеренного значения замедления и на своем выходе формирует положительное фактическое значение dist замедления. За формирователем 4 абсолютного значения, в свою очередь, расположен вычитатель 5, на который также подается заданное значение dsoll замедления, и, тем самым, на выходе 6 измерительного устройства 1 затем создается фактическое значение Δdist разности замедления.
Измерительное устройство 2 включает в себя датчик 7 числа оборотов, с помощью которого измеряются числа ω1, ω2…, ωn оборотов, причем различные числа оборотов оси соответствуют различным затормаживаемым колесным парам рельсового транспортного средства. Полученные таким образом измеренные величины числа оборотов оси подаются на элемент 8, который определяет количество k колесных пар с низким силовым замыканием между колесом и рельсом. Этот элемент 8 также нагружается соответствующей измеренной величиной v скорости движения рельсового транспортного средства, которая получается способом, описанным более подробно ниже. В элементе 8 с использованием фактических значений радиусов колес, определенных чисел оборотов оси и скорости v транспортного средства определяется фактическое значение проскальзывания между колесом и рельсом для каждой колесной пары, на которую должна воздействовать тормозная система. Если соответствующее фактическое значение проскальзывания превышает предопределенное пороговое значение проскальзывания, то соответствующая колесная пара считается проскальзывающей и тормозящейся с низким силовым замыканием. Посредством суммирования элемент 8 определяет количество k колесных пар с низким силовым замыканием и подает это значение на нелинейное звено 9. Нелинейное звено 9 определяет положительное пороговое значение Δdsoll разности замедления в зависимости от количества k проскальзывающих колесных пар с помощью монотонно возрастающей функции. Это означает, что с возрастанием количества k проскальзывающих колесных пар пороговое значение Δdsoll разности замедления увеличивается. Тем самым сообразно увеличивается разрешенный допуск для разности между заданным и фактическим замедлением. На основе этой зависимой от силового замыкания адаптации допуска можно с высокой степенью вероятности исходить из того, что сигнал сообщения об ошибке фактически возникает только при повреждении используемой тормозной системы рельсового транспортного средства. Сигнал порогового значения Δdsoll разности замедления возникает на выходе 10 измерительного устройства 2.
Расположенное после измерительного устройства 1 и измерительного устройства 2 устройство 3 оценки содержит на входной стороне дополнительный вычитатель 11, на который подается фактическое значение Δdist разности замедления от измерительного устройства 1 и пороговое значение Δdsoll разности замедления от измерительного устройства 2; тогда на входе дополнительного вычитателя 11 имеется промежуточное значение Δdzw разности замедления. Если выходной сигнал дополнительного вычитателя 11 больше нуля, то подключенное далее двухточечное звено 12 устанавливает логический сигнал LD на своем выходе на высокий уровень. Высокий уровень сигнала LD свидетельствует о недостаточном замедлении всего рельсового транспортного средства и поэтому представляет собой сигнал LD недостаточного замедления. Если выходной сигнал дополнительного вычитателя 11 меньше нуля, то логический сигнал будет оставаться на низком уровне.
Сигнал LD недостаточного замедления подается на схему И 13, на которую подаются другие логические сигналы LV, BRt и DS. Для того чтобы эти четыре сигнала на выходе логического элемента И 13 вызвали логический промежуточный сигнал LB сообщения об ошибке, должны выполняться другие условия, как описано ниже.
Прежде всего, вообще должно быть требование торможения, так как оно указывает на то, что протекает процесс торможения. Такое требование торможения представлено низким уровнем логического сигнала BR, которым нагружено звено 14 с запаздыванием. С помощью этого звена 14 с запаздыванием сигнал BR задерживается на продолжительность необходимого нарастания тормозного усилия; результатом является выходной сигнал BRt звена 14 с запаздыванием c высоким уровнем.
Рациональным образом осуществляется контроль тормозного действия контролируемой тормозной системы только выше предельной скорости vgrenz движения. Для этого сначала получают измеренную величину скорости v движения из сигналов датчиков пакета 1А инерциальных датчиков путем соответствующей оценки в каскаде 15А оценки. В зависимости от того, в каком направлении движется транспортное средство, знак измеренной величины скорости v движения может быть положительным или отрицательным, вследствие чего измеренная величина подается на другой формирователь 16 абсолютного значения. В этом формирователе 16 абсолютного значения формируется положительное фактическое значение vist скорости движения, которое с помощью дополнительного вычитателя 17 вычитается из положительного предельного значения vgrenz скорости движения; формирователь 16 абсолютного значения и дополнительный вычитатель 17 образуют вместе с каскадом 15А оценки воспринимающее устройство 15. Как только фактическое значение скорости движения оказывается ниже предельного значения vgrenz скорости движения, выход дополнительного вычитателя становится больше нуля, и другое двухточечное звено 18 переключает свой логический выходной сигнал как блокирующий сигнал LV на высокий уровень.
В показанном примере выполнения также должно быть обеспечено, что предусмотренные для торможения, не показанные на чертеже приводы контролируемой тормозной системы не развивают приводное действие. Последующий элемент 19 оценки определяет, являются ли знаки скорости v и замедление ах различными. Только если это так, дополнительный элемент 19 выдает логический сигнал DS высокого уровня.
Если все сигналы LD, LV, BRt и DS с высоким уровнем одновременно прикладываются к схеме И 13, то она генерирует сигнал LB, который подается на схему ИЛИ 20. К этой схеме ИЛИ 20 также на стороне входа прикладывается сигнал NB другой схемы И 21, которая нагружена от другого элемента 19 логическим сигналом DS и от звена 14 с запаздыванием сигналом BRt.
С помощью другой схемы И 21 проверяется, развивает ли контролируемая тормозная система приводное действие или нет. Если это так, то сигнал DS имеет высокий уровень, и при также высоком уровне сигнала BRt логический сигнал NB на выходе другой схемы И 21 устанавливается на высокий уровень.
Оба логических сигнала LB и NB сигнализируют, таким образом, соответственно повреждение контролируемой тормозной системы, так что из логической схемы ИЛИ 20 выдается логический сигнал BF в качестве сигнала сообщения об ошибке. Сигналом BF сообщения об ошибке, при высоком уровне, активируется по меньшей мере одна отличная от уже используемой тормозная система.
Показанный на фиг. 2 каскад 15A оценки, с одной стороны, на стороне входа соединен с пакетом 1А инерциальных датчиков по фиг. 1 и, кроме того, нагружается сигналом ST остановки, который установлен на высокий уровень, если рельсовое транспортное средство находится в состоянии покоя. На стороне входа каскад 15А оценки снабжен двумя делителями 30 и 31, с помощью которых шесть сигналов ах, ау, аz, а также ωх, ωу, ωz сначала разделяются на три сигнала ах, ау, аz ускорения, а также на три сигнала ωх, ωу, ωz вращения колес. При этом ось измерения датчика, относящегося к сигналу ах ускорения, лежит параллельно продольной оси рельсового транспортного средства. Сигналы датчиков имеют, соответственно, ошибки смещения, ошибки поперечной чувствительности, температурный уход, шумы измерений и т.п. В компенсационном элементе 32 эти ошибки в сигналах ускорения компенсируются известным способом. То же самое происходит для сигналов вращения колес в дополнительном компенсационном элементе 33. За обоими компенсационными элементами 32 и 33 включен элемент 34 преобразования, в котором согласно известному способу, например, через вычисление эйлеровых углов, вектор ускорения силы тяжести инерциальной системы преобразуется в систему координат датчиков. Преобразованный вектор используется для компенсации содержащихся в измеренных сигналах ускорения компонентов ускорения силы тяжести с помощью сумматора 35, который также подключен к компенсационному элементу 32.
С выходом дополнительного компенсационного элемента 33 на стороне входа также соединен элемент 36 для определения центробежного ускорения, в котором в соответствии с известным способом определяется содержащаяся в сигналах ускорения компонента центробежного ускорения. За этим элементом 36 для определения центробежного ускорения включен дополнительный сумматор 37, который другим входом соединен с выходом сумматора 35. Поэтому на выходе дополнительного вычитателя 37 формируются сигналы, скомпенсированные по ускорению силы тяжести и по центробежному ускорению.
Подключенный к дополнительному сумматору переключатель 38 направляет скомпенсированные сигналы ускорения на интегратор 39, за которым расположен дополнительный делитель 40. Выбранный этим первым делителем 40 первый сигнал является скоростью v движения.
С помощью не показанного на чертеже устройства логический сигнал ST состояния покоя устанавливается на высокий уровень, когда рельсовое транспортное средство стоит на месте. Как только эта сигнализация осуществляется, посредством переключателя 38, скомпенсированные ускорения с помощью элемента 41 устанавливаются в нуль. Точно так же через вход RS сброса интегратора 39 временные интегралы устанавливаются в нуль, благодаря чему выполняется калибровка подверженных дрейфу временных интегралов или скорости движения.
В элементе 34 преобразования может иметься интегратор, с помощью которого вычисляется преобразованный вектор ускорения силы тяжести. Интегратор, при высоком уровне логического сигнала ST состояния покоя, устанавливается на новые начальные значения, которые могут зависеть от текущих значений измеренных сигналов ах, ау, аz ускорения.
Пример выполнения по фиг. 3 совпадает в значительной степени с примером по фиг. 1, поэтому одинаковые ссылочные позиции используются для соответствующих частей. Измерительное устройство здесь более не предусматривается, а вместо этого сигнал порогового значения dsoll разности замедления задан постоянным. Но измерительное устройство 49 подключено к датчику 50 усилия, который соединен с контролируемой тормозной системой с по меньшей мере одним тормозным приводом (не показано).
С помощью датчика 50 в этом примере выполнения осуществляется измерение усилия f для определения тормозного действия не показанного тормозного привода на ассоциированной с ним оси рельсового транспортного средства. Поскольку соответствующая усилию f измеренная величина имеет знак, она сначала подается на формирователь 51 абсолютного значения, который формирует положительное фактическое значение fist усилия. Положительное фактическое значение fist усилия вычитается из предопределенного положительного заданного значения fsoll усилия посредством вычитателя 52. При этом заданное значение fsoll усилия может также, например, быть абсолютным значением заданного значения для регулирования тормозного привода, который может быть предпочтительно выполнен в виде электродвигателя. Если фактическое значение усилия ниже заданного значения усилия, то фактическое значение fist разности усилия больше нуля. Из фактического значения fist разности усилия с помощью дополнительного вычитателя 53 вычитается положительное пороговое значение fsoll разности усилия. Пороговое значение fsoll разности усилия указывает разрешенный допуск для разности между заданным и фактическим усилием. Если разность превышает допуск, то есть если сигнал на выходе вычитателя 53 больше нуля, то с помощью двухточечного звена 54 логический сигнал LF устанавливается на высокий уровень. Если допуск не превышен, то логический сигнал LF остается на низком уровне. Поэтому высокий уровень логического сигнала LF показывает слишком низкое действие тормозного привода или электродвигателя, которое может быть следствием повреждения тормозного привода. Посредством схемы И 55, которая здесь по сравнению со схемой И 13 по фиг. 1 имеет всего 5 входов, затем на выходе устройства 56 оценки, лишь незначительно измененного по сравнению с примером выполнения по фиг. 1, формируется сигнал BF сообщения об ошибке.
В показанном примере выполнения принимается, что на основе направления монтажа тормозного привода или электродвигателя знаки скорости v движения и усилия f всегда различны, если тормозной привод или электродвигатель развивает тормозное действие. С помощью устройства 19 оценки оба знака сравниваются друг с другом. Только при различных знаках логический сигнал DS на выходе двухточечного звена 19 получает высокий уровень. Тем самым логический сигнал DS в показанном на фиг. 3 примере выполнения указывает на тормозящий тормозной привод или электродвигатель, в то время, как он в показанном на фиг. 1 примере соответствует не приводящимся в действие приводам. Сигнал DS в обоих примерах выполнения обрабатывается затем аналогичным образом.
В примере выполнения по фиг. 4, где совпадающие с фиг. 3 элементы снабжены теми же ссылочными позициями, соответствующее изобретению устройство еще более упрощено по сравнению с примером выполнения по фиг. 3. Пример выполнения по фиг. 4 обходится без компонентов 4 и 5 измерительного устройства 1 по фиг. 3, так что здесь измерительное устройство состоит только из пакета 1А инерциальных датчиков. Устройство 57 оценки не требует элементов 11 и 12 устройства 56 оценки по фиг. 3. Логический сигнал LD в соответствии с этим не возникает. Поэтому данный пример выполнения отказывается от критерия для слишком низкого общего замедления рельсового транспортного средства, которое могло бы связываться с повреждением используемой тормозной системы. Соответственно схема И 58 имеет четыре входа.



Группа изобретений относится к контролю тормозной системы тормозного оборудования с несколькими тормозными системами рельсового транспортного средства. Устройство для контроля тормозной системы тормозного оборудования включает измерительные устройства (1) для измерения замедления рельсового транспортного средства и силового замыкания между колесом и рельсом, устройство (3) оценки. Согласно способу определяют замедление рельсового транспортного средства с получением измеренной величины (Δdist) замедления, определяют силовое замыкание между колесом и рельсом с получением измеренной величины (Δdsoll) силового замыкания, и при малом замедлении и нормальном силовом замыкании генерируют сигнал (BF) сообщения об ошибке. Согласно второму варианту на основе измеренной величины (Δdist) замедления генерируют сигнал (LD) недостаточного замедления, который подают на схему И (55). Измеряют тормозное усилие (f) тормозного привода, и на основе измеренного тормозного усилия (f) генерируют логический сигнал (LF), который подают на схему И (55), и при малом замедлении и низком тормозном усилии (f) генерируют сигнал (BF) сообщения об ошибке. Достигается уменьшение износа колеса и рельса при торможении. 4 н. и 40 з.п. ф-лы, 4 ил.
1. Способ контроля тормозной системы тормозного оборудования с несколькими тормозными системами рельсового транспортного средства, в котором
определяют замедление рельсового транспортного средства с получением измеренной величины (Δdist) замедления,
определяют силовое замыкание между колесом и рельсом с получением измеренной величины (Δdsoll) силового замыкания; и
при малом замедлении и нормальном силовом замыкании генерируют сигнал (BF) сообщения об ошибке.
2. Способ по п. 1, отличающийся тем, что
из измеренного фактического значения (dist) замедления и предопределенного заданного значения (dsoll) замедления в качестве измеренной величины замедления формируют фактическое значение (Δdist) разности замедления,
фактическое значение (Δdist) разности замедления сравнивают с пороговым значением (Δdsoll) разности замедления с образованием промежуточного значения (Δdzw) разности замедления и
при промежуточном значении (Δdzw) разности замедления, превышающем допустимое значение, генерируют сигнал (LD) недостаточного замедления.
3. Способ по п. 2, отличающийся тем, что
заданное значение (dsoll) замедления изменяют в зависимости от измеренного фактического значения (vist) скорости рельсового транспортного средства.
4. Способ по п. 3, отличающийся тем, что
фактическое значение (vist) скорости рельсового транспортного средства сравнивают с предельным значением (vgrenz) скорости и
при фактическом значении (vist) скорости, лежащем ниже предельного значения (vgrenz) скорости, формирование сигнала (BF) сообщения об ошибке блокируют.
5. Способ по п. 2, отличающийся тем, что
измеряют фактическое значение (vist) скорости рельсового транспортного средства и сравнивают с предельным значением (vgrenz) скорости и
при фактическом значении (vist) скорости, лежащем ниже предельного значения (vgrenz) скорости, пороговое значение (Δdsoll) разности замедления повышают.
6. Способ по п. 1, отличающийся тем, что
для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства измеряют фактическое значение проскальзывания и сравнивают с предопределенным пороговым значением проскальзывания и
при фактическом значении проскальзывания, лежащем выше порогового значения проскальзывания, формируют соответствующее пороговое значение (Δdsoll) разности замедления в качестве измеренной величины силового замыкания.
7. Способ по п. 6, отличающийся тем, что
пороговое значение (Δdsoll) разности замедления увеличивают соответственно определенному количеству колесных пар с фактическими значениями проскальзывания, лежащими выше порогового значения проскальзывания.
8. Способ по п. 1, отличающийся тем, что
для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства определяют фактическое значение силового замыкания в контакте колесо-шина и сравнивают с предопределенным пороговым значением силового замыкания и
при фактическом значении силового замыкания, лежащем ниже порогового значения силового замыкания, формируют соответствующее пороговое значение разности замедления в качестве измеренной величины силового замыкания.
9. Способ по п. 8, отличающийся тем, что
пороговое значение разности замедления увеличивают соответственно определенному количеству колесных пар с фактическими значениями силового замыкания, лежащими ниже порогового значения силового замыкания.
10. Способ для контроля тормозной системы с по меньшей мере одним тормозным приводом тормозного оборудования с несколькими тормозными системами рельсового транспортного средства, в котором
- определяют замедление рельсового транспортного средства с получением измеренной величины (Δdist) замедления,
- на основе измеренной величины (Δdist) замедления генерируют сигнал (LD) недостаточного замедления, который подают на схему И (55),
- измеряют тормозное усилие (f) по меньшей мере одного тормозного привода,
- на основе измеренного тормозного усилия (f) генерируют логический сигнал (LF), который подают на схему И (55), и
при малом замедлении и низком тормозном усилии (f) генерируют сигнал (BF) сообщения об ошибке.
11. Способ по п. 10, отличающийся тем, что
из измеренного фактического значения (dist) замедления и предопределенного заданного значения (dsoll) замедления в качестве измеренной величины замедления формируют фактическое значение (Δdist) разности замедления,
фактическое значение (Δdist) разности замедления сравнивают с пороговым значением (Δdsoll) разности замедления с образованием промежуточного значения (Δdzw) разности замедления и
при промежуточном значении (Δdzw) разности замедления, превышающем допустимое значение, генерируют сигнал (LD) недостаточного замедления.
12. Способ по п. 11, отличающийся тем, что
заданное значение (dsoll) замедления изменяют в зависимости от измеренного фактического значения (vist) скорости рельсового транспортного средства.
13. Способ по п. 12, отличающийся тем, что
фактическое значение (vist) скорости рельсового транспортного средства сравнивают с предельным значением (vgrenz) скорости и
при фактическом значении (vist) скорости, лежащем ниже предельного значения (vgrenz) скорости, формирование сигнала (BF) сообщения об ошибке блокируют.
14. Способ по п. 11, отличающийся тем, что
измеряют фактическое значение (vist) скорости рельсового транспортного средства и сравнивают с предельным значением (vgrenz) скорости и
при фактическом значении (vist) скорости, лежащем ниже предельного значения (vgrenz) скорости, пороговое значение (Δdsoll) разности замедления повышают.
15. Способ по п. 10, отличающийся тем, что
в случае тормозной системы с по меньшей мере одним тормозным приводом сигнал измерения замедления и измеренную величину скорости рельсового транспортного средства проверяют в отношении их знаков и при одинаковых знаках сразу же генерируют сигнал ошибки для подключения дополнительной тормозной системы.
16. Способ по п. 15, отличающийся тем, что
знаки замедления и измеренной величины скорости рельсового транспортного средства определяют с использованием пакета инерциальных датчиков.
17. Способ по п. 10, отличающийся тем, что
измерение тормозного усилия осуществляют посредством измерения усилия и/или крутящего момента на оси рельсового транспортного средства, ассоциированной с тормозным приводом.
18. Способ по п. 10, отличающийся тем, что
измерение тормозного усилия осуществляют с помощью датчиков на обратимо деформируемом за счет торможения деформируемом теле.
19. Способ по п. 10, отличающийся тем, что
измерение тормозного усилия в случае электрического привода выполняют путем измерения токов и напряжений.
20. Способ по п. 16, отличающийся тем, что
из измеренного фактического значения (fist) усилия и предопределенного заданного значения (fsoll) усилия формируют разностное фактическое значение (Δfist) усилия,
разностное фактическое значение (Δfist) усилия сравнивают с пороговым значением (Δfsoll) разностного усилия с формированием промежуточного значения (Δfzw) разностного усилия и
при промежуточном значении (Δfzw) разностного усилия, лежащем выше допустимого значения, генерируют сигнал (LF) недостаточного усилия.
21. Способ по п. 20, отличающийся тем, что
заданное значение (fsoll) усилия изменяют в зависимости от измеренного фактического значения (vist) скорости рельсового транспортного средства.
22. Способ по п. 20, отличающийся тем, что
заданное значение (fsoll) усилия изменяют в зависимости от числа оборотов колесной пары, связанной с тормозным приводом.
23. Устройство для контроля тормозной системы тормозного оборудования с несколькими тормозными системами рельсового транспортного средства с
измерительным устройством (1) для измерения замедления рельсового транспортного средства,
измерительным устройством (2) для измерения силового замыкания между колесом и рельсом и
устройством (3) оценки, расположенным после измерительного устройства (1) и измерительного устройства (2), которое при незначительном замедлении рельсового транспортного средства и нормальном силовом замыкании между колесом и рельсом выдает сигнал (BF) сообщения об ошибке.
24. Устройство по п. 23, отличающееся тем, что
измерительное устройство (1) и устройство (3) оценки выполнены таким образом, что они
из измеренного фактического значения (dist) замедления и предопределенного заданного значения (dsoll) замедления формируют фактическое значение (Δdist) разности замедления в качестве измеренной величины замедления,
сравнивают фактическое значение (Δdist) разности замедления с пороговым значением (Δdsoll) разности замедления в качестве измеренной величины силового замыкания с формированием промежуточного значения (Δdzw) разности замедления и
при промежуточном значении (Δdzw) разности замедления, лежащем выше допустимого значения, генерируют сигнал (LB) недостаточного замедления.
25. Устройство по п. 24, отличающееся тем, что
перед устройством (3) оценки расположено воспринимающее устройство (15), в котором фактическое значение (vist) скорости рельсового транспортного средства сравнивается с предельным значением (vgrenz) скорости, и
которое при фактическом значении (vist) скорости, лежащем ниже предельного значения (vgrenz) скорости, выдает на устройство (3) оценки сигнал (LV) блокировки, с помощью которого формирование сигнала (BF) сообщения об ошибке в устройстве оценки (3) блокируется.
26. Устройство по п. 24, отличающееся тем, что воспринимающее
устройство (15) на стороне входа имеет каскад (15А) оценки, который соединен своим входом с выходом пакета (1А) инерциальных датчиков и выполнен таким образом, что он на своем выходе выдает измеренную величину скорости рельсового транспортного средства, не подверженную влиянию ускорения силы тяжести и центробежного ускорения.
27. Устройство по п. 25, отличающееся тем, что
каскад (15А) оценки на выходной стороне также соединен с измерительным устройством (2) и там своей измеренной величиной (v) скорости обуславливает то, что при фактическом значении скорости, лежащем ниже предельного значения скорости, происходит увеличение порогового значения (Δdsoll) разности замедления.
28. Устройство по п. 23, отличающееся тем, что
для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства предусмотрен каскад измерения фактического значения проскальзывания, в котором измеренное фактическое значение проскальзывания сравнивается с предопределенным пороговым значением проскальзывания, и который при фактическом значении проскальзывания, лежащем выше порогового значения проскальзывания, вызывает увеличение соответствующего порогового значения разности замедления.
29. Устройство по п. 28, отличающееся тем, что
имеется счетчик для определения количества колесных пар с фактическими значениями проскальзывания, лежащими выше порогового значения проскальзывания, который формирует сигнал для увеличения порогового значения разности замедления соответственно определенному количеству колесных пар с фактическими значениями проскальзывания, лежащими выше порогового значения проскальзывания.
30. Устройство по п. 23, отличающееся тем, что
для определения силового замыкания между колесом и рельсом на по меньшей мере одной колесной паре рельсового транспортного средства предусмотрен каскад измерения для фактического значения силового замыкания в контакте колесо-рельс, который выполнен с возможностью сравнения фактического значения силового замыкания с предопределенным пороговым значением силового замыкания и формирования соответствующего порогового значения разности замедления при фактическом значении силового замыкания, лежащем ниже порогового значения силового замыкания.
31. Устройство по п. 30, отличающееся тем, что
имеется счетчик, который определяет количество колесных пар с фактическими значениями силового замыкания, лежащими ниже порогового значения силового замыкания, и выдает сигнал счета для повышения порогового значения разности замедления соответственно определенному количеству колесных пар с фактическими значениями силового замыкания, лежащими ниже порогового значения силового замыкания.
32. Устройство по п. 23, отличающееся тем, что
предусмотрен быстродействующий каскад подключения, который на входной стороне нагружается измеренной величиной, пропорциональной замедлению, а также измеренной величиной, пропорциональной скорости рельсового транспортного средства, и выполнен таким образом, что он проверяет измеренные величины в отношении их знаков и при одинаковых знаках немедленно формирует сигнал ошибки для подключения дополнительной тормозной системы.
33. Устройство по п. 32, отличающееся тем, что
предусмотрен пакет инерциальных датчиков, с помощью которого определяется величина и знак замедления и скорости рельсового транспортного средства.
34. Устройство для контроля тормозной системы с по меньшей мере одним тормозным приводом тормозного оборудования с несколькими тормозными системами рельсового транспортного средства с
- измерительным устройством (1) для измерения замедления рельсового транспортного средства,
- измерительным устройством (49) для измерения тормозного усилия по меньшей мере одного тормозного привода и
- устройством (56) оценки, расположенным после измерительного устройства (1) и измерительного устройства (56), которое содержит схему И (55) и которое при низком замедлении и низком тормозном усилии выдает сигнал (BF) сообщения об ошибке, причем
- на основе измеренного замедления генерируется сигнал (LD) недостаточного замедления, который подается на схему И (55), а на основе измеренного тормозного усилия (f) генерируется логический сигнал (LF), который подается на схему И (55).
35. Устройство по п. 34, отличающееся тем, что
измерительное устройство (1) и устройство (3) оценки выполнены таким образом, что они из измеренного фактического значения (dist) замедления и предопределенного заданного значения (dsoll) замедления формируют фактическое значение (Δdist) разности замедления в качестве измеренной величины замедления,
сравнивают фактическое значение (Δdist) разности замедления с пороговым значением (Δdsoll) разности замедления в качестве измеренной величины силового замыкания с формированием промежуточного значения (Δdzw) разности замедления и
при промежуточном значении (Δdzw) разности замедления, лежащем выше допустимого значения, генерируют сигнал (LB) недостаточного замедления.
36. Устройство по п. 35, отличающееся тем, что
перед устройством (3) оценки расположено воспринимающее устройство (15), в котором фактическое значение (vist) скорости рельсового транспортного средства сравнивается с предельным значением (vgrenz) скорости, и
которое при фактическом значении (vist) скорости, лежащем ниже предельного значения (vgrenz) скорости, выдает на устройство (3) оценки сигнал (LV) блокировки, с помощью которого формирование сигнала (BF) сообщения об ошибке в устройстве оценки (3) блокируется.
37. Устройство по п. 35, отличающееся тем, что
воспринимающее устройство (15) на стороне входа имеет каскад (15А) оценки, который соединен своим входом с выходом пакета (1А) инерциальных датчиков и выполнен таким образом, что он на своем выходе выдает измеренную величину скорости рельсового транспортного средства, не подверженную влиянию ускорения силы тяжести и центробежного ускорения.
38. Устройство по п. 36, отличающееся тем, что
каскад (15А) оценки на выходной стороне также соединен с измерительным устройством (2) и там своей измеренной величиной (v) скорости обуславливает то, что при фактическом значении скорости, лежащем ниже предельного значения скорости, происходит увеличение порогового значения (Δdsoll) разности замедления.
39. Устройство по п. 34, отличающееся тем, что
перед измерительным устройством расположен по меньшей мере один измеритель усилия/крутящего момента, который размещен на оси рельсового транспортного средства, ассоциированной с тормозным приводом.
40. Устройство по п. 39, отличающееся тем, что
измерительное устройство (49) и устройство (3) оценки выполнены так, что они из измеренного фактического значения (fist) тормозного усилия и предопределенного заданного значения (fsoll) тормозного усилия формируют фактическое значение (Δfist) разности тормозного усилия,
сравнивают фактическое значение (Δfist) разности тормозного усилия с пороговым значением (Δfsoll) разности тормозного усилия с формированием промежуточного значения (Δfzw) разности тормозного усилия и
при промежуточном значении (Δfzw) разности тормозного усилия, лежащем выше допустимого значения, формируют сигнал (LF) недостаточности тормозного усилия.
41. Устройство по п. 34, отличающееся тем, что
предусмотрено обратимо деформируемое за счет торможения деформируемое тело с датчиками для измерения тормозного усилия.
42. Устройство по п. 34, отличающееся тем, что
в случае электрического привода с ним ассоциировано устройство измерения тока и/или напряжения для измерения тормозного усилия.
43. Устройство по п. 34, отличающееся тем, что
предусмотрен быстродействующий каскад подключения, который на входной стороне нагружается измеренной величиной, пропорциональной замедлению, а также измеренной величиной, пропорциональной скорости рельсового транспортного средства, и выполнен таким образом, что он проверяет измеренные величины в отношении их знаков и при одинаковых знаках немедленно формирует сигнал ошибки для подключения дополнительной тормозной системы.
44. Устройство по п. 43, отличающееся тем, что
предусмотрен пакет инерциальных датчиков, с помощью которого определяется величина и знак замедления и скорости рельсового транспортного средства.

