Изобретение относится к сельскохозяйственному машиностроению, в частности к робототехнике, а именно к погрузчикам, используемых на полевых работах для выполнения таких операций, как погрузка и укладка сеток с овощами в контейнер самоходного шасси, применяемых в хозяйствах по возделыванию и переработке овощных культур.
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания (патент РФ №2053191, опубл. 1996).
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания, при этом вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной этой стороне основания, гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах основания, соединенных между собой верхней его стороной, при этом между горизонтальной балкой и наклонными сторонами основания расположены укосины, при этом упомянутая горизонтальная балка соединена с фермой, установленной на вертикальных стойках, охватывающих кабину и закрепленных на раме транспортного средства (Патент РФ №2207317, опубл. 2003).
Известен манипулятор-трипод промышленного назначения, содержащий основание, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, согласно изобретению исполнительные звенья выполнены в виде линейных приводов, каждый из которых соединяется между собой и с двухстепенным управляемым захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев в виде полусфер и грузозахватным органом, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, оси симметрии звеньев двухстепенного управляемого захвата перпендикулярны друг другу, а ось симметрии пятиподвижного сферического шарнира совпадает с одной из осей двухстепенного управляемого захвата, каждое звено имеет жесткое крепление с шаговым двигателем, основание выполнено в виде равностороннего треугольника, на котором установлены датчики технического зрения. (Патент РФ №2651781, опубл. 23.04.18)
За прототип выбран манипулятор-трипод, содержащий основание, на котором установлен датчик технического зрения, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира, выполненные в виде линейных приводов, каждый из которых соединяется между собой с двухстепенным захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, одно звено из которых выполнено в виде полусферы, при этом другое независимое последовательно соединенное звено выполнено в виде прямоугольной скобы, основание выполнено в виде прямоугольной фермы с выступом, грузозахватный орган выполнен в виде клещевого захвата, состоящего из двух рычагов и линейного привода, при этом каждый конец рычага состоит из трех полуколец, расположенных на равноудаленном расстоянии друг от друга и жестко закрепленных на стойке. (Патент РФ №183544, опубл. 25.09.2018)
К недостаткам известных технических решений следует отнести: недостаточные функциональные возможности манипулятора-трипода, в частности небольшая зона обслуживания.
Указанный технический результат достигается роботом-погрузчиком сеток с овощами, содержащий блок управления, основание, на котором установлен датчик технического зрения, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира, выполненные в виде линейных приводов, каждый из которых соединяется между собой с двухстепенным захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, одно звено из которых выполнено в виде полусферы, при этом другое независимое последовательно соединенное звено выполнено в виде прямоугольной скобы, основание выполнено в виде прямоугольной фермы с выступом, грузозахватный орган, состоящий из двух рычагов и линейного привода, отличающийся тем, что дополнительно содержит пространственно-параллелограммный механизм, два актуатора, датчик технического зрения самоходного шасси, цилиндрические шарниры кинематической пары пятого класса, при этом пространственно-параллелограммный механизм выполнен в виде четырех одноразмерных стоек, каждая из которых имеет крепление с основанием манипулятора-трипода и с рамой самоходного шасси посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, каждый из двух актуаторов крепятся одним концом к стойке пространственно-параллелограммного механизма, другим концом, к раме самоходного шасси посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, дополнительный датчик технического самоходного шасси зрения жестко установлен на передней части рамы самоходного шасси, блок управления установлен на самоходном шасси.
Технический результат - увеличение зоны обслуживания за счет пространственно-параллелограммного механизма.
Изобретение поясняется чертежем.
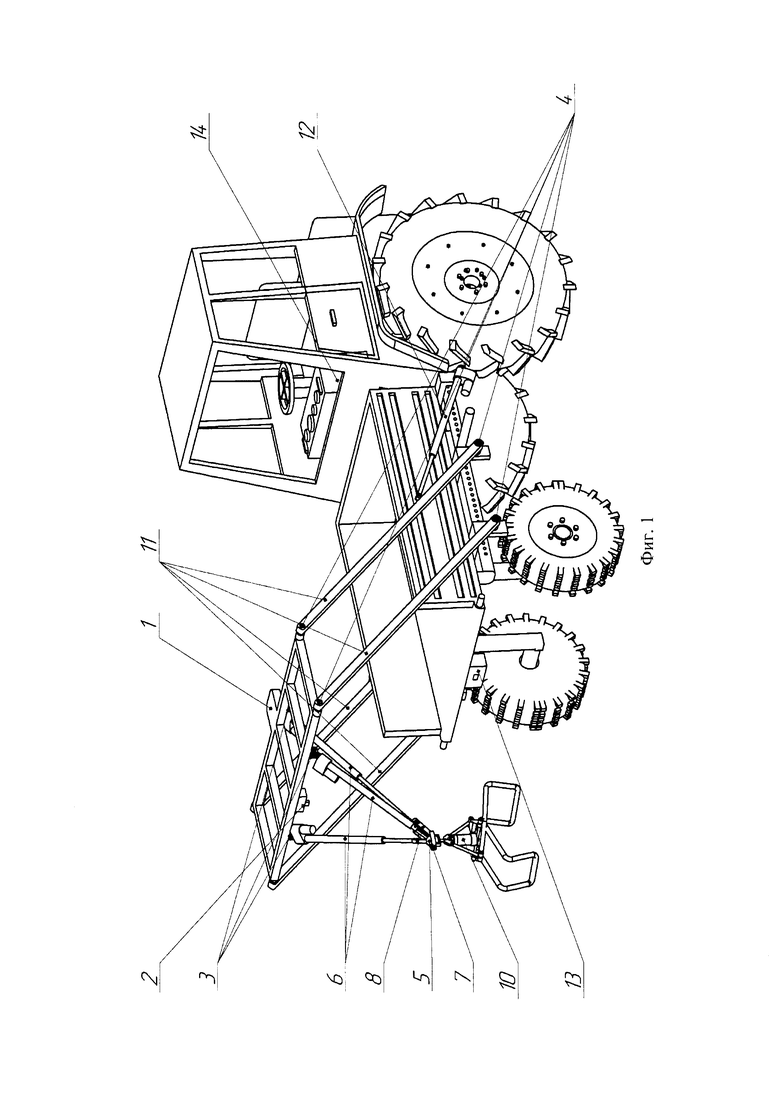
На фиг. 1 изображен общий вид робота-погрузчика сеток с овощами.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Робот-погрузчик сеток с овощами состоит из основания 1, датчика технического зрения 2, шарниров 3, цилиндрических шарниров 4 с кинематической парой пятого класса сферического шарнира 5, линейных приводов 6, двухстепенного захвата в виде полусферического звена 7 и в виде прямоугольной скобы 8, грузозахватного органа, состоящего из рычагов 9 и линейного привода 10, пространственно-параллелограммный механизм в виде четырех одноразмерный стоек 11, актуаторов 12, дополнительного датчика технического зрения 13, блока управления 14.
Работа робота-погрузчика сеток с овощами осуществляется следующим образом.
Самоходное шасси двигающиеся по полю распознает объект с помощью датчика технического зрения 13 установленного на раме самоходного шасси, после чего блок управления 14 отдает команду двум актуаторам 12, которые осуществляют наклон пространственного параллелограммного механизма, затем датчик технического зрения 2 установленный на основании 1 распознает объект манипулирования и определяет его координаты расположения, далее блок управления 14 отдает команды исполнительным приводам 6, 10 на перемещение объекта.
Изменение длины штока хотя бы одного линейного привода 6 пространственно-параллелограммного механизма, способствует изменению геометрии всей пространственной структуры. Шарниры 4 обеспечивают необходимую двухстепенную подвижность стоек 11 относительно рамы самоходного шасси, и линейных приводов относительно основания 1. Вследствие изменения геометрии, пространственно-параллелограммного механизма, и пространственной структуры манипулятора-трипода перемещается сферический пятиподвижный шарнир 5, который уводит за собой захват и грузозахватный орган. Таким образом, максимальное перемещение грузозахватного органа выполняется пространственно-параллелограмным механизмом, и параллельно-пространственным механизмом манипулятора-трипода. После того как грузозахватный орган полностью с ориентируется в нужное положение происходит заключительный этап - захват с помощью линейного привода 10 и его погрузка.
Таким образом, робот погрузчик, обладая пространственно-параллелограммным механизмом с линейными приводами, датчиками технического зрения, позволит увеличить зону обслуживания погрузчика, а также расширить функциональные возможности манипулятора-трипода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор с расширенной зоной действия | 2021 |
|
RU2768059C1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2764855C1 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2763624C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Автоматизированный сортировщик-подборщик манипулятора-трипода | 2019 |
|
RU2722960C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к робототехнике, а именно к погрузчикам, используемых на полевых работах для выполнения таких операций, как погрузка и укладка сеток с овощами в контейнер самоходного шасси. Робот-погрузчик сеток с овощами содержит блок управления, основание манипулятора-трипода, на котором установлен датчик технического зрения, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира, выполненные в виде линейных приводов, каждый из которых соединяется между собой с двухстепенным захватом и грузозахватный орган, состоящий из двух рычагов и линейного привода. Робот-погрузчик дополнительно содержит пространственно-параллелограммный механизм, два актуатора, датчик технического зрения самоходного шасси, цилиндрические шарниры кинематической пары пятого класса. Пространственно-параллелограммный механизм выполнен в виде четырех одноразмерных стоек, каждая из которых имеет крепление с основанием манипулятора-трипода и с рамой самоходного шасси посредством вращательных цилиндрических шарниров с кинематической парой пятого класса. Каждый из двух актуаторов крепятся одним концом к стойке пространственно-параллелограммного механизма, другим концом, к раме самоходного шасси посредством вращательных цилиндрических шарниров с кинематической парой пятого класса. Дополнительный датчик технического самоходного шасси зрения жестко установлен на передней части рамы самоходного шасси, блок управления установлен на самоходном шасси. Технический результат - увеличение зоны обслуживания. 1 ил.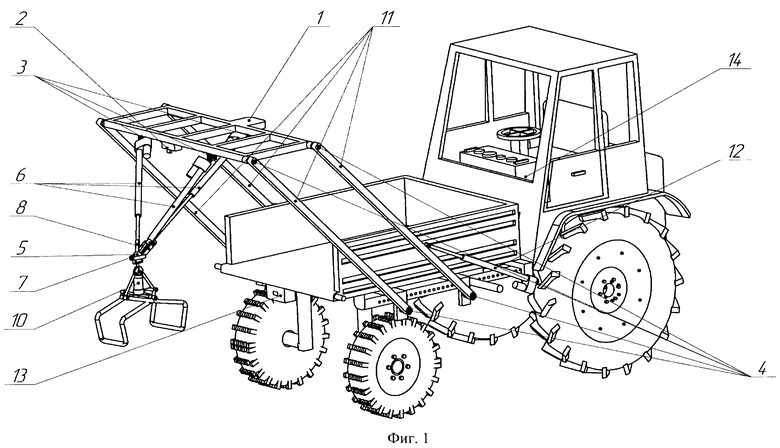
Робот-погрузчик сеток с овощами, содержащий блок управления, основание манипулятора-трипода, на котором установлен датчик технического зрения, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира, выполненные в виде линейных приводов, каждый из которых соединяется между собой с двухстепенным захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, одно звено из которых выполнено в виде полусферы, при этом другое независимое последовательно соединенное звено выполнено в виде прямоугольной скобы, основание выполнено в виде прямоугольной фермы с выступом, грузозахватный орган, состоящий из двух рычагов и линейного привода, отличающийся тем, что дополнительно содержит пространственно-параллелограммный механизм, два актуатора, датчик технического зрения самоходного шасси, цилиндрические шарниры кинематической пары пятого класса, при этом пространственно-параллелограммный механизм выполнен в виде четырех одноразмерных стоек, каждая из которых имеет крепление с основанием манипулятора-трипода и с рамой самоходного шасси посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, каждый из двух актуаторов крепятся одним концом к стойке пространственно-параллелограммного механизма, другим концом, к раме самоходного шасси посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, дополнительный датчик технического самоходного шасси зрения жестко установлен на передней части рамы самоходного шасси, блок управления установлен на самоходном шасси.
| РАДИАЛЬКО-УПОРНЬШ СФЕРИЧЕСКИЙ ДВУХРЯДИЫЙ РОЛИКОПОДШИПНИК | 0 |
|
SU183544A1 |
| Навесной подъемник | 1990 |
|
SU1754640A1 |
| Погрузчик | 1973 |
|
SU536123A2 |
| 0 |
|
SU185354A1 | |
| DE 19748313 C2, 25.01.2001. | |||

